
A New Dynamic Injection System of Urea-Water Solution for a Vehicular Select Catalyst Reduction System

Abstract
:1. Introduction
2. Correction Strategy Mathematical Analysis
2.1. NH3 Slip Situation Analysis
- (1)
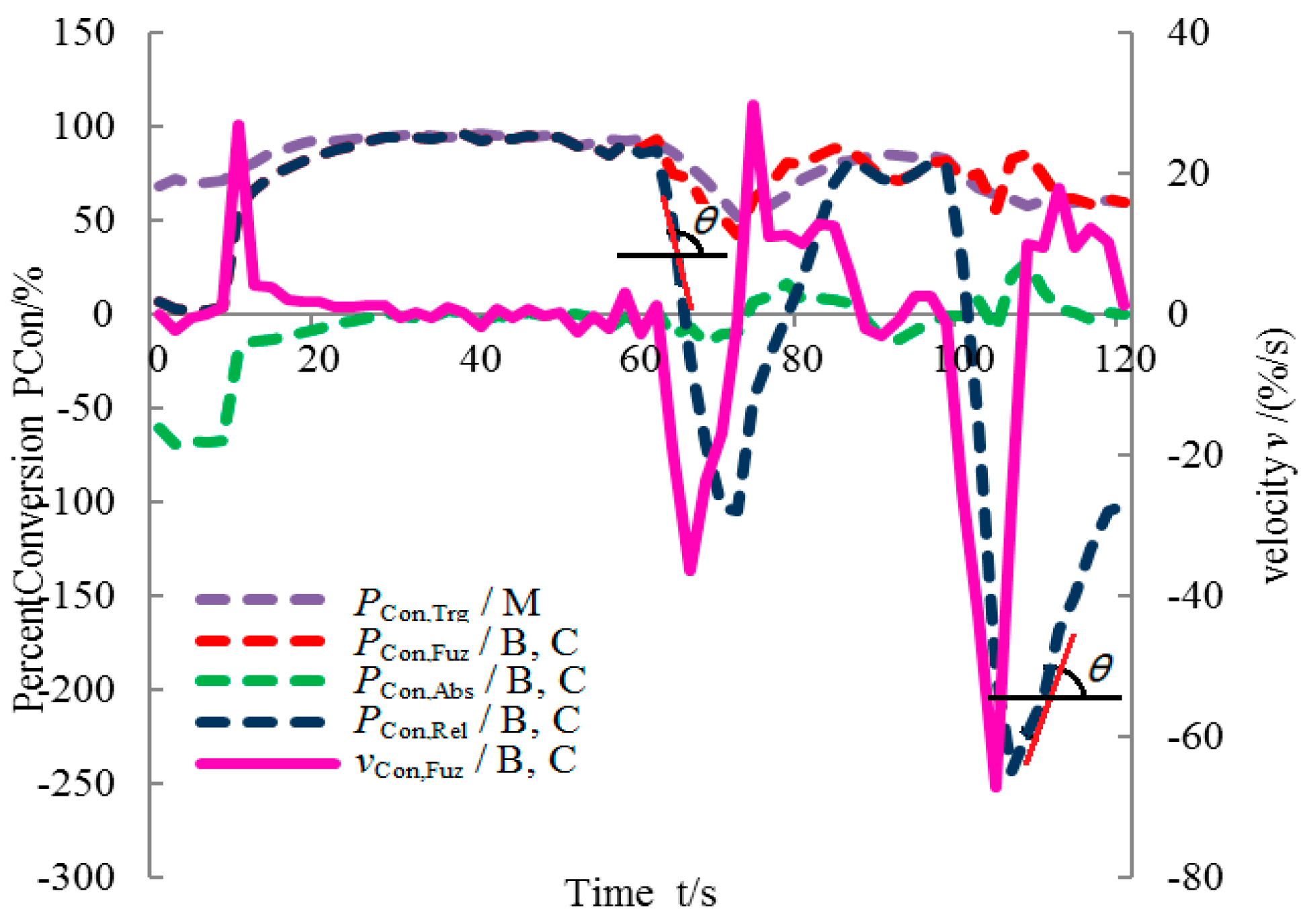
- PCon,Fuz > PCon,TrgFor the original map of PCon,Trg obtained from the engine calibration experiments, from the theoretically point of view, with the PCon,Fuz ≤ PCon,Trg under any circumstances. In the actual conditions when the engine calibration points are not enough, engine working instability or sensor testing errors might occur and lead to an abnormal circumstance (like PCon,Fuz > PCon,Trg). For such an instance the NH3 slip is assumed to be zero, thus the UWS need not be corrected.
- (2)
- 0 ≤ PCon,Fuz ≤ PCon,Trg, and tanθ < 0 (vCon,Fuz < 0)In this case, the uncertain conversion efficiency is lower than its target and stays away from the target value gradually. According to Equation (8), PCon,Fuz becomes smaller due to the increase of the CN,Act. The enlargement of the CN,Act may be caused by the following two cases:
- The first case is that the excessively injected UWS caused an acceleration of the process and subsequently an increasing NH3 slip due unreacted ammonia.
- The second case is that insufficient UWS may cause a slowing the process and lead to a growing amount of NOx remaining unreduced due to unavailability of reactant.
Therefore, it may be concluded that with the condition aUWS,Act ≤ 0 and PCon,Abs ≤ PCon,Trg, there is no NH3 slip, thus UWS compensation could be continued. When aUWS,Act > 0 and PCon,Abs = PCon,Trg, NH3 slip is severely increased, thus UWS injection should be reduced. - (3)
- 0 ≤ PCon,Fuz ≤ PCon,Trg, and tanθ ≥ 0 (vCon,Fuz ≥ 0)In this case, the uncertain conversion efficiency is lower than its target and becomes close to the target value gradually. In this case it can be concluded that when aUWS,Act > 0 and PCon,Abs ≤ PCon,Trg, there is no NH3 slip like the previous cases, thus UWS compensation should be continued. With the condition aUWS,Act ≤ 0 and PCon,Abs ≥ PCon,Trg, UWS injection should be reduced as NH3 slip is going to increase.
- (4)
- PCon,Fuz < 0This particular case emerges on ruling out the test error and the engine calibration map error, thus under these circumstances CNOx,Act ≤ CNOx,Ori (theoretically), whereas, CN,Act > CNOx,Ori (PCon,Fuz < 0), CNH3,Act > 0 as shown in Equation (7). This case indicates a seriously high level of NH3 slip therefore UWS injection must be stopped immediately.
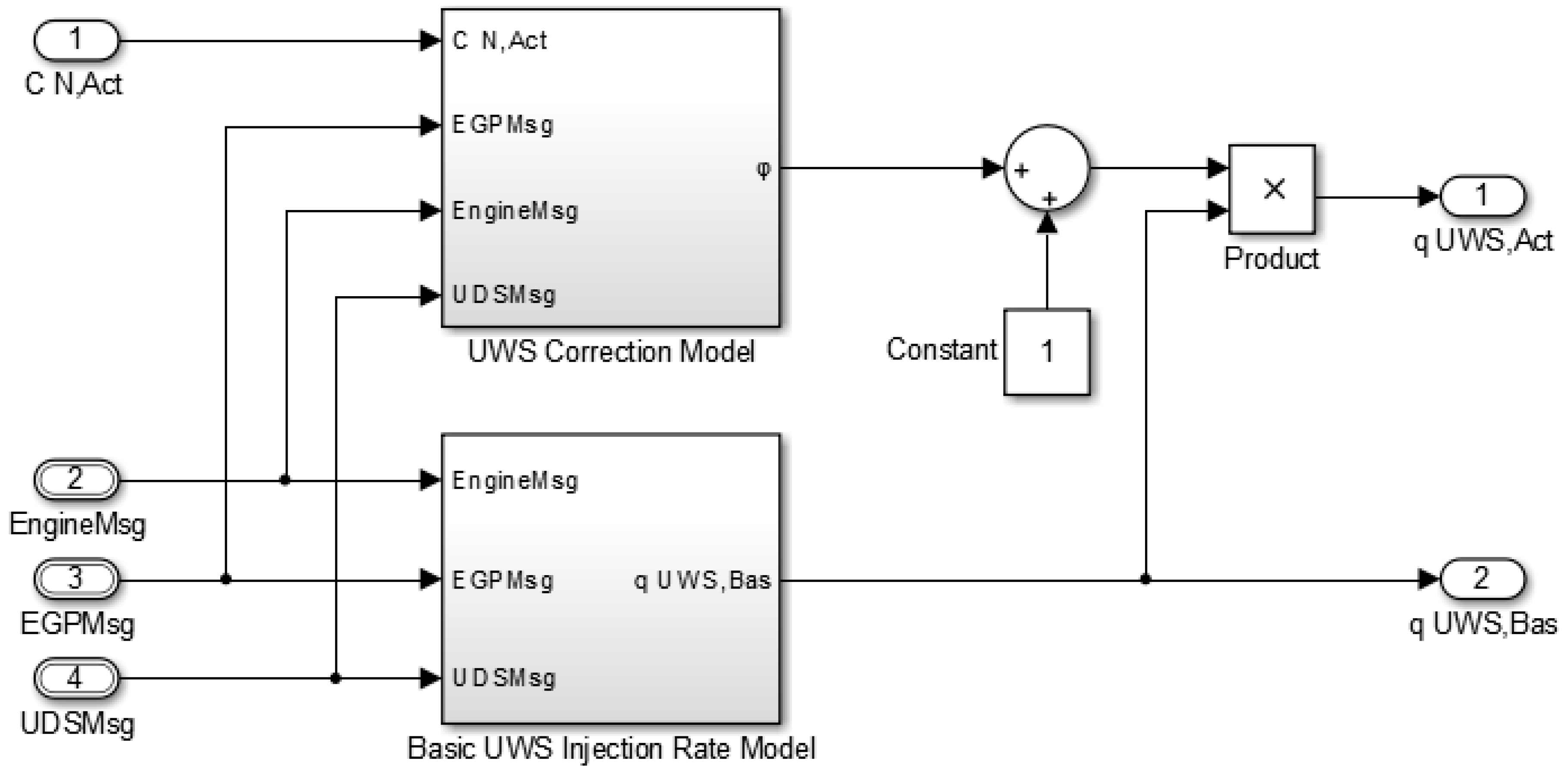
2.2. Urea Water Solution Flow Dynamic Compensation
2.3. Urea Water Solution Flow Dynamic Reduction
2.4. Special Case
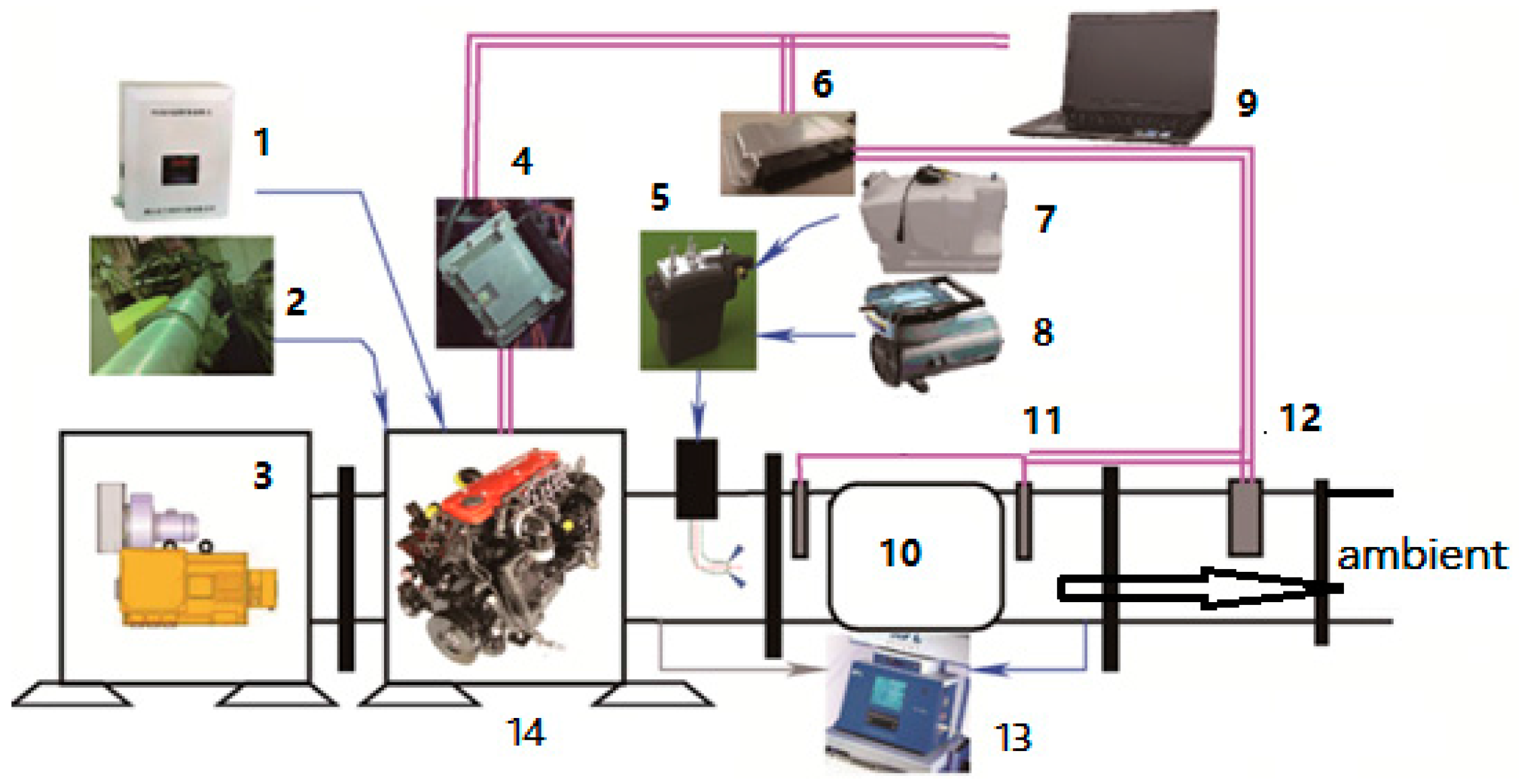
3. Experiments and Result Analysis
3.1. Mathematical Model Validation
- (1)
- In the beginning, PCon,Abs was less than the target valve PCon,Trg. However, these two values are the same as that after the 30th second.
- (2)
- PCon,Fuz and PCon,Abs remain the same as that before the 60th second. Then, two serious sinks appeared in the PCon,Fuz curve.
- (3)
- After the beginning of UWS injection, PCon,Rel was stable near a 0 value between the 20th and 60th second and fluctuated in a range of ±30% between the 60th and 120th second.
- (1)
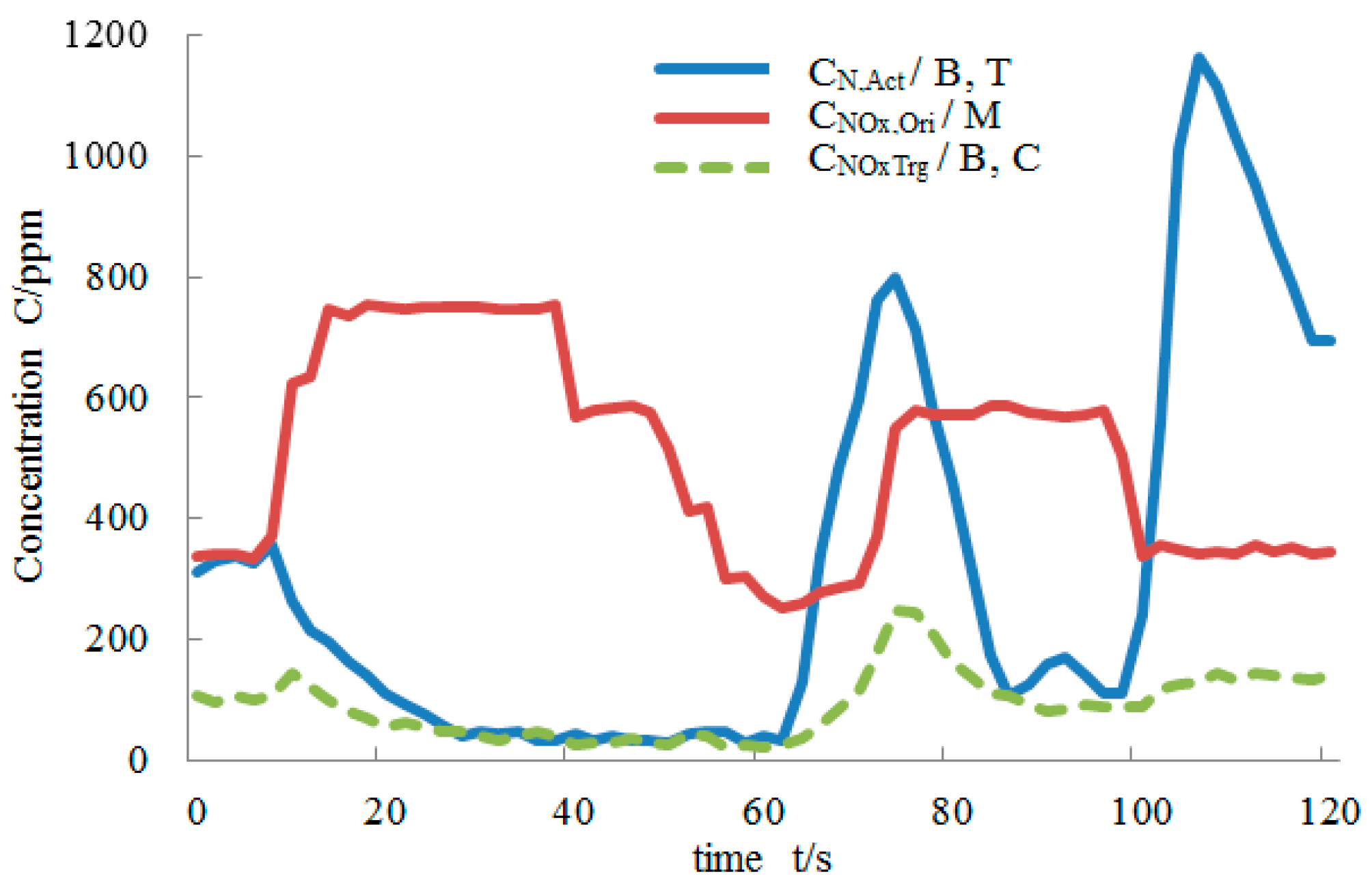
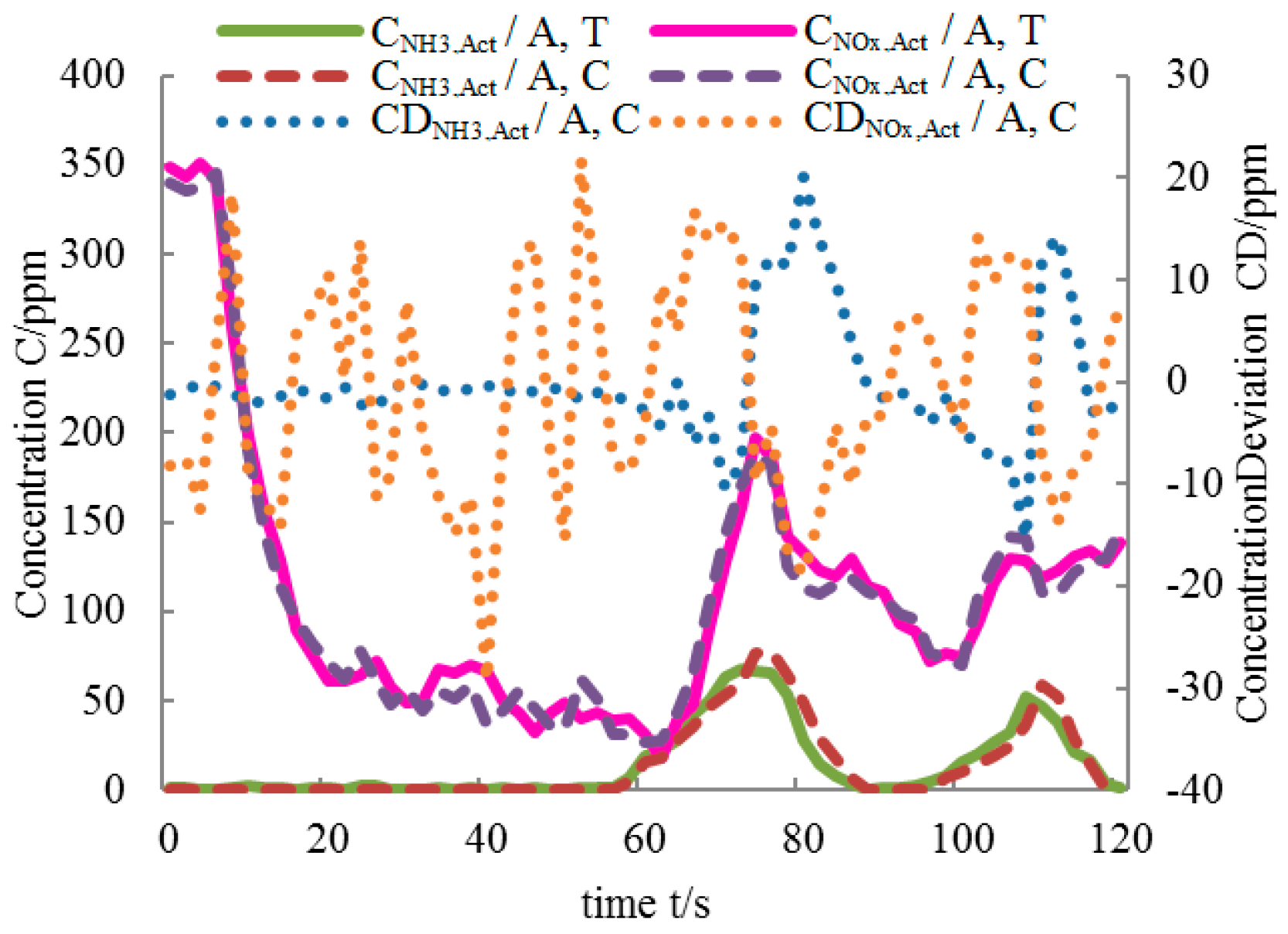
- From the 0 to the 60th second and the 90th to 100th second, the experimental value of the NH3 concentration downstream from the SCR system is almost 0 ppm. The NOx concentration and NH3 concentration calculated by the correction model completely overlap with the experimental values.
- (2)
- From the 60th to 90th second and the 100th to 120th second, there are slight deviations in the hump position between the calculated value and the experimental value of the NH3 concentration. The two compared values of NOx concentration no longer completely overlap, but the range and the change rate are apparently the same.
- (3)
- At zero NH3 slip condition, the calculation deviation of NH3 concentration was between −10 and 0 ppm and that of the NOx concentration was between −20 and 20 ppm.
- (4)
- Under high NH3 slip conditions, the calculation deviation of NH3 concentration was between −40 and 100 ppm and that of NOx concentration was between −70 and 70 ppm.
3.2. Low-Frequency Dynamic Process Correction Result
- (1)
- From the UWS injection starting position to 60th second there was no NH3 slip. Between the 60th and 120th second the second two humps appeared in the NH3 concentration curve at less than 80 ppm. That’s because of the fractionally unreacted NH3 slip downstream of the SCR system.
- (2)
- In the low-frequency process, the actual tested value of the NOx emission was almost the same as the target value. The actual tested value was slightly lower than the target value in the hump region of the NH3 slip. That’s because of the undue UWS injection and more NOx was restored by the excessive NH3.
- (3)
- In the hump region of the NH3 slip, the measured value is slightly higher than the target value of the NOx concentration. That’s because the NOx sensor was influenced by NH3 and NOx at the same time as shown in Equation (7).
- (1)
- The CNOx,Act was slightly reduced in the last 60 s on application of the UWS dynamic correction. However, the control method has no significant effect on the value of CNOx,Act in the low-frequency process.
- (2)
- The CNH3,Act was also significantly reduced in the last 60 s after the UWS dynamic correction application. The values of CNH3,Act in the low-frequency process are also greatly influenced by the application of the correction.
- (3)
- Overall, the application of UWS dynamic control method has reduced ∫CNH3,Act dt by 92.68%, respectively. Moreover it has also improved ∫CNOx,Act dt by 5.58%.
- (1)
- In the beginning of the low-frequency process, PCon,Abs was smaller than PCon,Trg. However, the two curves overlapped after the 15th second.
- (2)
- From 0 to 60th second, PCon,Fuz was the same as PCon,Abs, whereas, after the 60th second PCon,Fuz started to deviate with a slightly sinking trend.
- (3)
- Initially PCon,Abs was less than 0 with a rising trend, whereas, it became stable when close to 0 and 15th to 60th second, while from 60th to 120th second it fluctuated many times with an amplitude between −15% and 15%.
- (4)
- PCon,Abs and PCon,Trg were achieved in a shorter period as compared to Figure 4. The sinking amplitude of the PCon,Fuz curve has significantly decreased after the 60th second and became stable in the last 60 s.
- (1)
- In the corrected low-frequency process the trend of the calculated NH3 concentration was the same with that of the experimental value. The deviation of the calculation was more obvious in the region of high NH3 slip as compared to the results shown in Figure 7. The deviation oscillated between −10 to 0 ppm and −5 to 0 ppm with NH3 slip and between −40 to 100 ppm and −20 to 15 ppm without NH3 slip.
- (2)
- Moreover, during the corrected low−frequency process trend of the calculated NOx concentration was the same as the actual tested value. The calculation deviation was uniformly distributed and oscillated between −70 to 70 ppm and −20 to 20 ppm as compared with Figure 7.
- (3)
- NOx concentration calculation and NH3 concentration downstream of the SCR system would become more accurate with application of the UWS dynamic correction.
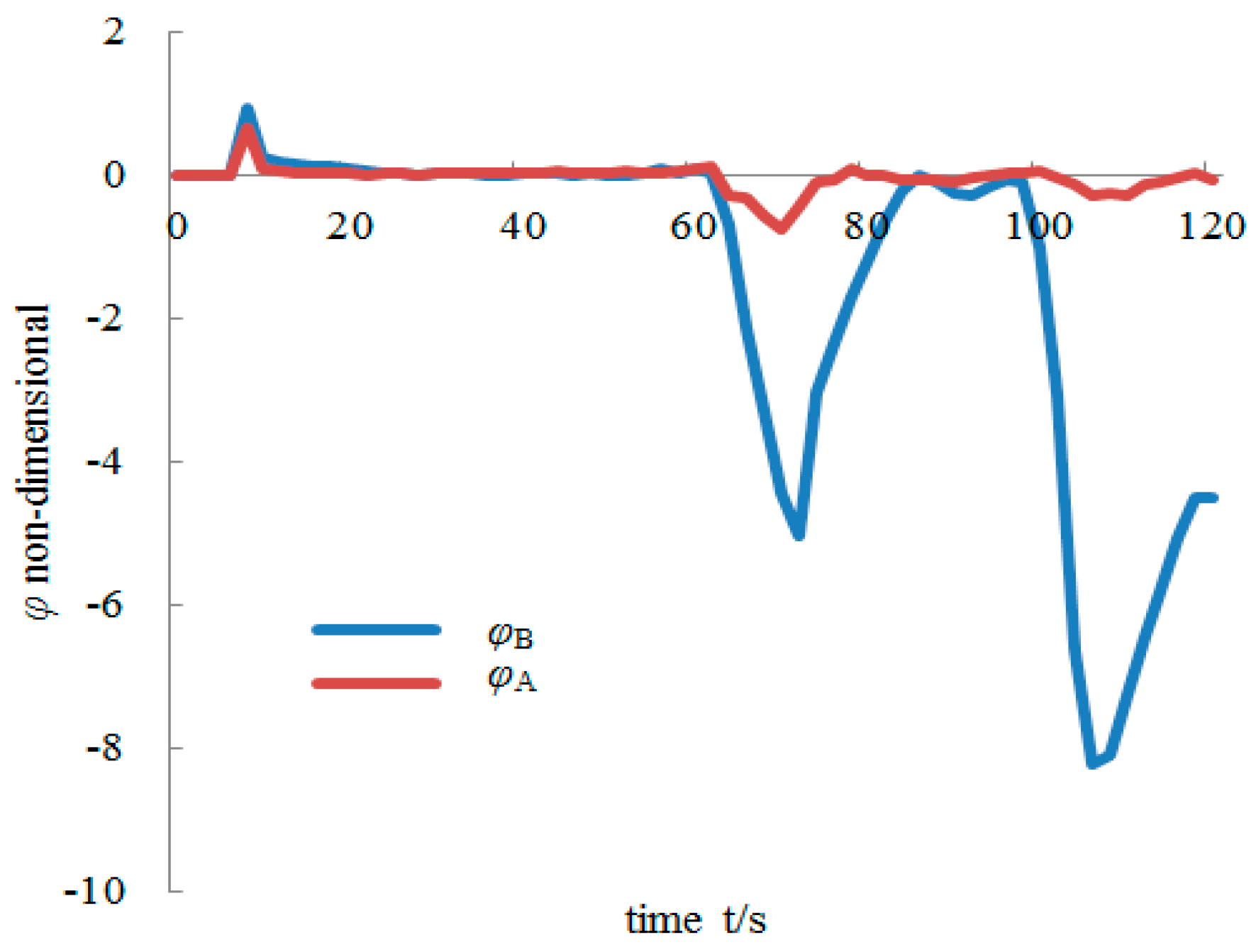
- (1)
- From the UWS injection starting to 20th second, φB remained at more than 0 with a gradually declining trend. That is for the catalyst NH3 storage characteristic therefore UWS injection should be compensated.
- (2)
- From 20th to 60th second, φB remained constant and close to 0. Now catalyst NH3 storage has been saturated without NH3 slip so UWS injection may not be corrected.
- (3)
- From 60th to 120th second, φB was less than 0. As compared to Figure 7 it is observed that the change trend of φB was contrary to the change trend of NH3 concentration. It is because of the severely increasing NH3 slip and UWS injection must be reduced.
- (4)
- φA and φB were greater than 0 and declined gradually from the starting position of UWS injection till the 20th second. However, the decrease of φA was faster than that of φB.
- (5)
- φA and φB remained close to 0 from 20th till the 60th second.
- (6)
- Values of both the factors (φA and φB) became less than 0 during the last 60 s. Both factors shared two troughs. The trough values of φB ranged from −5 to −8 and that of the φA was −1 to 0 in curve.
- (1)
- PCon,Fuz and vCon,Fuz were changed in the last 60 s on applying UWS injection dynamic correction during a high level of NH3 slip.
- (2)
- The PCon,Fuz after correction appeared more close to PCon,Trg and its range was reduced from −250%–95% to 40%–95% compared to the values before correction.
- (3)
- The range of the vCon,Fuz was reduced from −70%–30% to −10%–10% compared to the value before correction.
3.3. High-Frequency Dynamic Process Correction Result
4. Conclusions
- (1)
- It can be generalized that the “uncertain conversion efficiency curve tangent analysis” method can accurately justify the different NH3 slip situation.
- (2)
- The calculation deviation can be controlled with NOx between −20 ppm and 20 ppm and NH3 between −20 ppm to 15 ppm by application of UWS dynamic correction in a low-frequency process. The NOx emission was improved by 5.58% and NH3 slip was reduced by 92.68%.
- (3)
- In the application of UWS dynamic correction in high-frequency process (i.e., during of ETC test), in spite the fact the NOx emission has been improved by 53.9%, the NH3 slip was reduced by 90.8%. The level of engine NOx emissions and NH3 slip has been improved up to Euro-IV and closer to the Euro-V standard. The newly developed method presents a significant NH3 slip inhibition.
Author Contributions
Conflicts of Interest
Abbreviations
| ASC | Ammonia slip catalysts |
| ETC | European transient cycle |
| HCR | High-pressure common rail |
| PM | Particulate matter |
| SCR | Select catalyst reduction |
| UWS | Urea water solution |
Symbols
| aUWS,Act | Acceleration of qUWS,Act |
| CN,Act | NOx concentration measured by the NOx sensor |
| CNOx,Act | Actual NOx concentration at the testing position |
| CNOx,Ori | Original NOx concentration of the engine before aftertreatment |
| CNOx,Trg | The target of NOx concentration downstream SCR system |
| CNH3,Act | Actual NH3 concentration at the testing position |
| CDNH3,Act | Test error of actual NH3 concentration |
| CDNOx,Act | Test error of actual NOx concentration |
| KT | Cross sensitive factor |
| PCon,Fuz | Uncertain conversion efficiency |
| PCon,Abs | Absolute conversion efficiency |
| PCon,Rel | Relative conversion efficiency |
| PCon,Trg | Targeted conversion efficiency |
| qUWS,Act | Real-time UWS injection rate after correction |
| qUWS,Bas | Basic UWS injection rate before correction |
| QNOx,Red | NOx conversion potential |
| QNOx,AcRed | Actual value of the total reduced NOx |
| QNOx,TrgRed | Total reduced NOx under target conversion efficiency |
| RAN | Ammonia nitrogen ratio set in the SCR control strategy |
| φ | Correction factor of the UWS injection rate |
| φA | Correct factor after applying the control method |
| φB | Correct factor before applying the control method Reference |
References
- Johnsont, T.V. Diesel emission control in review. SAE Int. J. Fuels Lubr. 2009, 2. [Google Scholar] [CrossRef]
- Johnsont, T.V. Diesel emissions in review. SAE Int. J. Eng. 2011, 4, 143–157. [Google Scholar] [CrossRef]
- Koebel, M.; Elsener, M.; Kleemann, M. Urea-SCR: A promising technique to reduce NOx emissions from automotive diesel engines. Catal. Today 2000, 59, 335–345. [Google Scholar] [CrossRef]
- Flynn, P.F.; Hunter, G.L.; Durrett, R.P.; Farrell, L.A.; Akinemi, W.C. Minimum engine flame temperature impacts on diesel and spark-ignition engine NOx production. SAE Tech. Pap. 2000. [Google Scholar] [CrossRef]
- Sharp, C.; Howell, S.; Jobe, J. The effect of biodiesel fuels on transient emissions from modern diesel engines, Part I: Regulated emissions and performance. SAE Tech. Pap. 2000. [Google Scholar] [CrossRef]
- Cloudt, R.; Baert, R.; Willems, F.; Vergouwe, M. SCR-only concept for heavy-duty Euro VI applications. MTZ 2009, 70, 58–63. [Google Scholar] [CrossRef]
- Seher, D.; Reichelt, M.; Wickert, S. Control strategy for NOx—Emission reduction with SCR. SAE Tech. Pap. 2003. [Google Scholar] [CrossRef]
- Kammerstetter, H.; Werner, M.; Doell, R.; Kanters, G. The challenge of precise characterizing the Specific large-span flows in urea dosing systems for NOx reduction. SAE Tech. Pap. 2008. [Google Scholar] [CrossRef]
- Kass, M.D.; Thomas, J.F.; Lewis, S.A.; Storey, J.M.; Domingo, N.; Graves, R.L.; Panov, A.; Park, P. Selective catalytic reduction of NOx emissions from a 5.9 liter diesel engine using ethanol as a reductant. SAE Tech. Pap. 2003. [Google Scholar] [CrossRef]
- Chen, C.-T.; Tan, W.-L. Mathematical modeling, optimal design and control of an SCR reactor for NOx removal. J. Taiwan. Inst. Chem. Eng. 2012, 43, 409–419. [Google Scholar] [CrossRef]
- Nova, I.; Tronconi, E. (Eds.) Urea-SCR Technology for de NOx after Treatment of Diesel Exhausts; Spring: New York, NY, USA, 2014.
- Shrestha, S.; Harold, M.P.; Kamasamudram, K. Experimental and modeling study of selective ammonia oxidation on multi-functional washcoated monolith catalysts. Chem. Eng. J. 2015, 278, 24–35. [Google Scholar] [CrossRef]
- Opitz, B.; Bendrich, M.; Drochner, A.; Vogel, H.; Hayes, R.E.; Forbes, J.F.; Votsmeier, M. Simulation study of SCR catalysts with individually adjusted ammonia dosing strategies. Chem. Eng. J. 2015, 264, 936–944. [Google Scholar] [CrossRef]
- Feng, T.; Lü, L. The characteristics of ammonia storage and the development of model-based control for diesel engine urea-SCR system. J. Ind. Eng. Chem. 2015, 28, 97–109. [Google Scholar] [CrossRef]
- Rauch, D.; Albrecht, G.; Kubinski, D.; Moos, R. A microwave-based method to monitor the ammonia loading for a vanadia-based SCR catalyst. Appl. Catal. B 2015, 165, 36–42. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Ammonia coverage ratio and input simultaneous estimation in ground vehicle selective catalytic reduction (SCR) systems. J. Frankl. Inst. 2015, 352, 708–723. [Google Scholar] [CrossRef]
- Schär, C.M.; Onder, C.H.; Geering, H.P.; Elsener, M. Control-oriented model of an SCR catalytic converter system. SAE Tech. Pap. 2004. [Google Scholar] [CrossRef]
- Willems, F.; Cloudt, R.; van den Eijinden, E.; van Genderen, M.; Verbeek, R.; de Jager, B.; Boomsma, W.; van de Heuvel, I. Is closed-loop SCR control required to meet future emission targets? SAE Tech. Pap. 2007. [Google Scholar] [CrossRef]
- Wang, D.Y.; Yao, S.; Shost, M.; Yoo, J.-H.; Cabush, D.; Racine, D.; Cloudt, R.; Willems, F. Ammonia sensor for close-loop SCR control. SAE Tech. Pap. 2008. [Google Scholar] [CrossRef]
- Kobayashi, N.; Yamashita, A.; Naito, O.; Setoguchi, T.; Murase, T. Development of simultaneous NOx/NH3 sensor in exhaust gas. Mitsubishi Tech. Rev. 2001, 38, 126–130. [Google Scholar]
- Moos, R. A brief overview on automotive exhaust gas sensors based on electroceramics. Int. J. Appl. Ceram. Technol. 2005, 2, 401–413. [Google Scholar] [CrossRef]
- Lu, G.; Diao, Q.; Yin, C.G.; Yang, S.Q.; Guan, Y.Z.; Cheng, X.Y.; Liang, X.S. High performance mixed-potential type NOx sensor based on stabilized zironia and oxide electrode. Solid State Ion. 2014, 262, 292–297. [Google Scholar] [CrossRef]
- Jeffrey, W.F. Materials for high temperature electrochemical NOx gas sensors. Sens. Actuators B 2007, 121, 652–663. [Google Scholar]
- Wang, W. Simulation and Experimental Research on SCR System Control Strategy of Marine Diesel Engine. Master’s Thesis, Harbin Engineering University, Harbin, China, 2013. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Manufacturer | Location | Remark |
|---|---|---|---|---|
| Diesel engine | ISDe270 40 | DCEC | Xiangfan, China | L6 |
| Dynamometer | GWD300 | POWERLINK | Changsha, China | Eddy current style |
| Fuel consumption | FC2210 | POWERLINK | Changsha, China | Quality style |
| Air flow meter | ToCeil | Shanghai ToCeil Engine Testing Equipment | Shanghai, China | Hot film style |
| Emissions analyzer | SESAM4.0 | AVL | Graz, Austria | Fourier transform infrared spectroscopy |
| Cylinder Number | Bore/Stroke | Capacity | Compression Ratio | Rated Power/Speed | Max Torque | Fuel Supply Type |
|---|---|---|---|---|---|---|
| - | mm/mm | L | - | kW/rpm | Nm/rpm | - |
| L6 | 107/124 | 6.7 | 17.3:1 | 198/2500 | 970/1400 | high pressure common rail |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Lin, W.; Zhang, Y. A New Dynamic Injection System of Urea-Water Solution for a Vehicular Select Catalyst Reduction System. Energies 2017, 10, 12. https://doi.org/10.3390/en10010012
Li L, Lin W, Zhang Y. A New Dynamic Injection System of Urea-Water Solution for a Vehicular Select Catalyst Reduction System. Energies. 2017; 10(1):12. https://doi.org/10.3390/en10010012
Chicago/Turabian StyleLi, Long, Wei Lin, and Youtong Zhang. 2017. "A New Dynamic Injection System of Urea-Water Solution for a Vehicular Select Catalyst Reduction System" Energies 10, no. 1: 12. https://doi.org/10.3390/en10010012
APA StyleLi, L., Lin, W., & Zhang, Y. (2017). A New Dynamic Injection System of Urea-Water Solution for a Vehicular Select Catalyst Reduction System. Energies, 10(1), 12. https://doi.org/10.3390/en10010012