
Wireless DC Motor Drives with Selectability and Controllability





Abstract
:1. Introduction
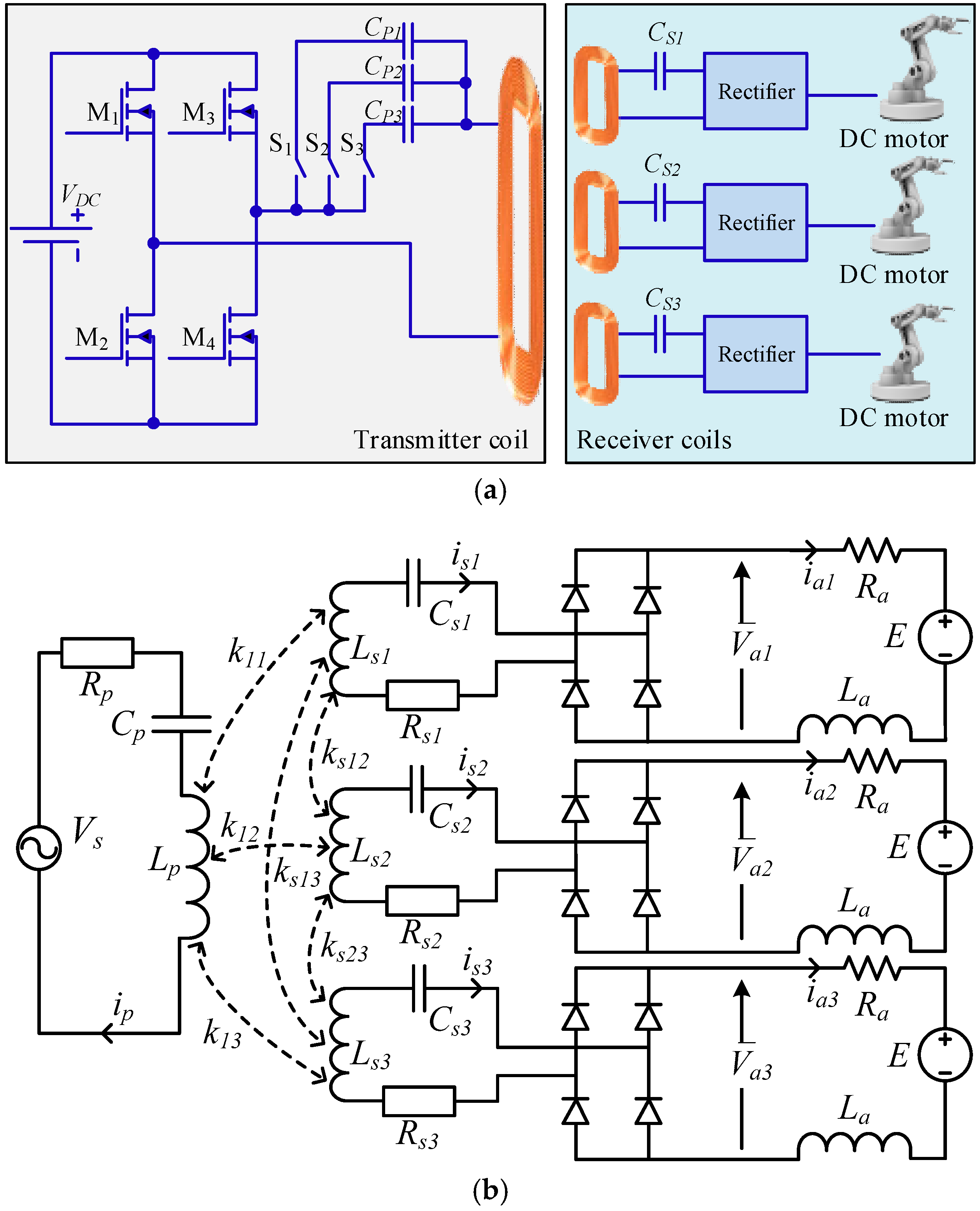
2. System Configuration
3. System Design
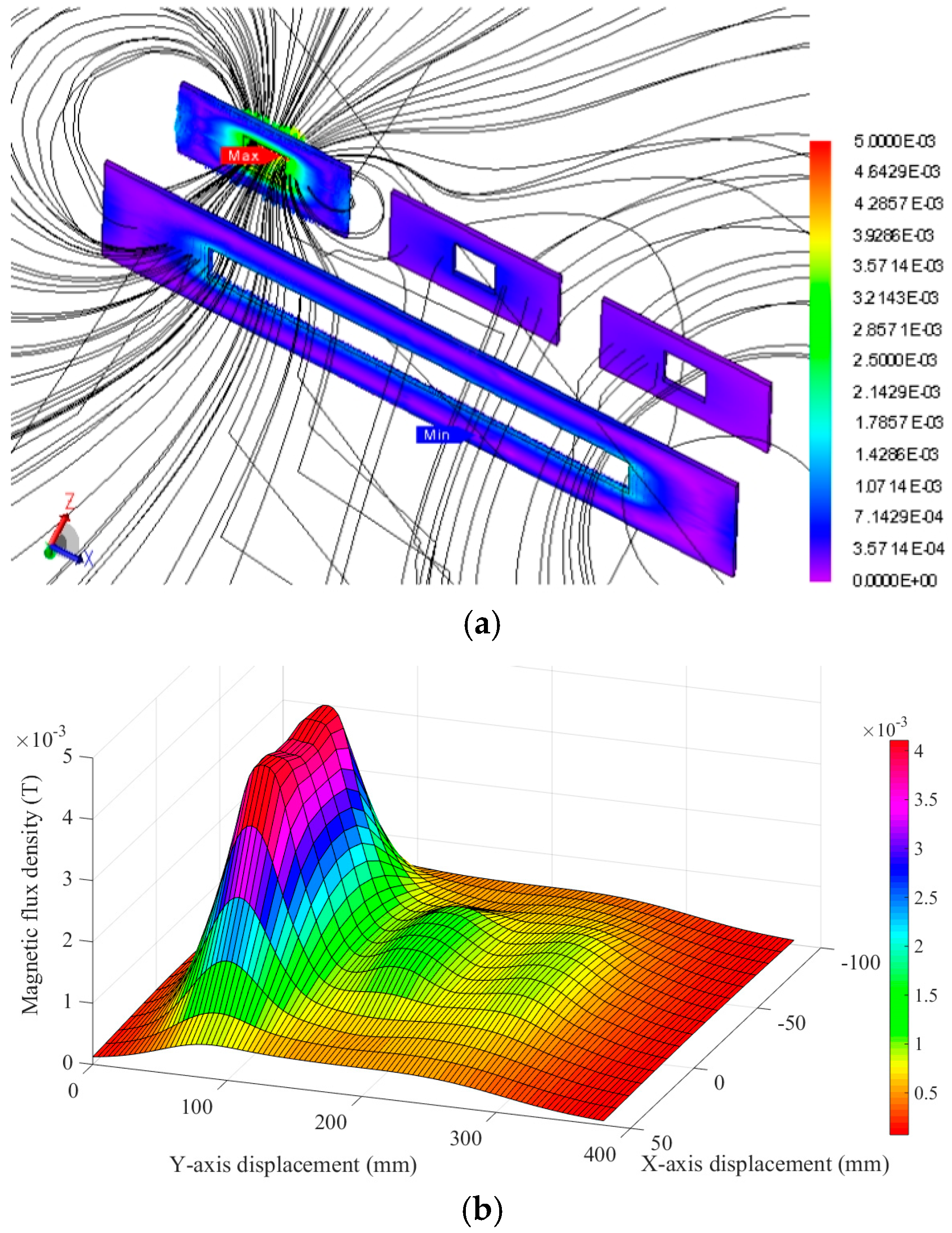
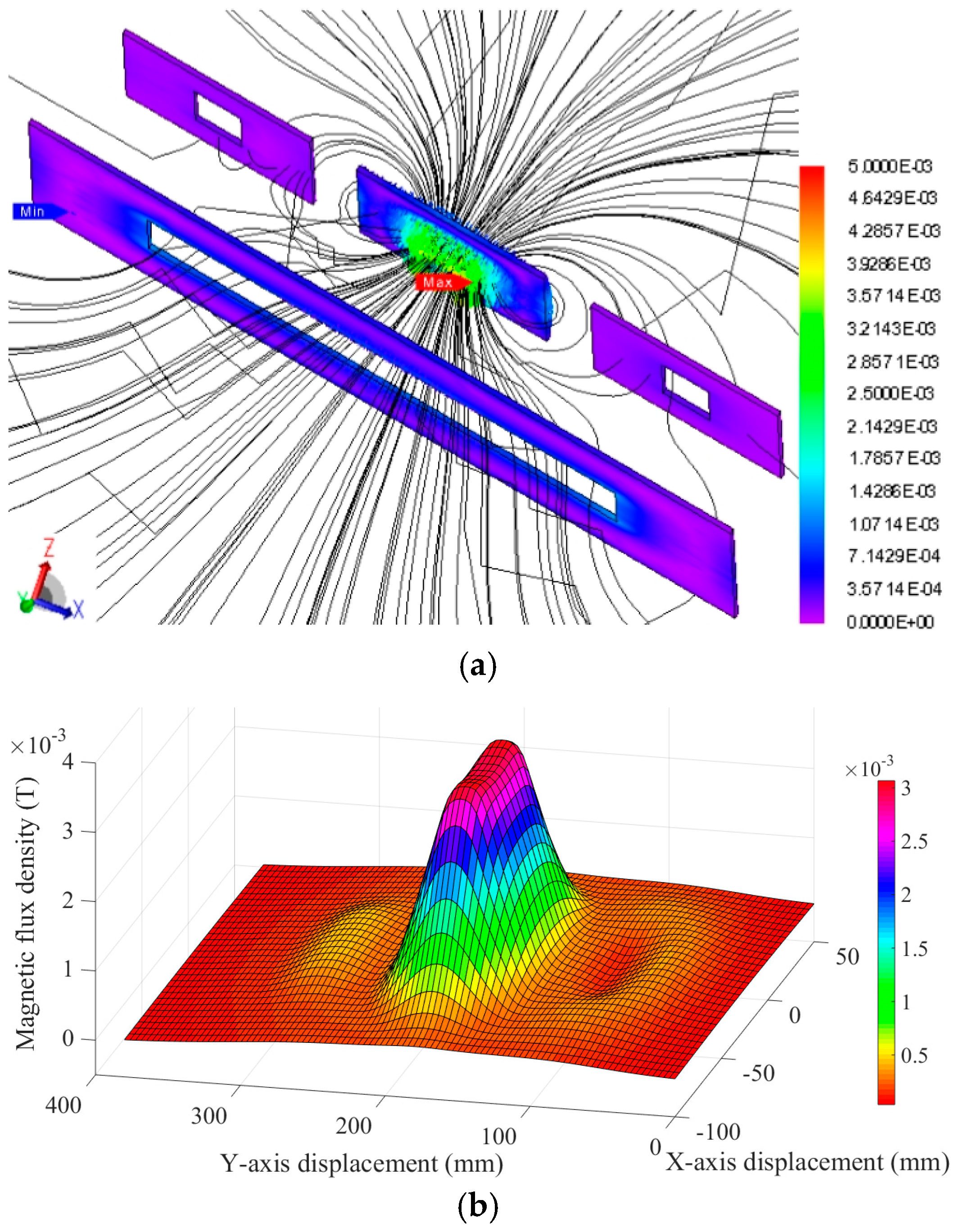
4. Simulation Results
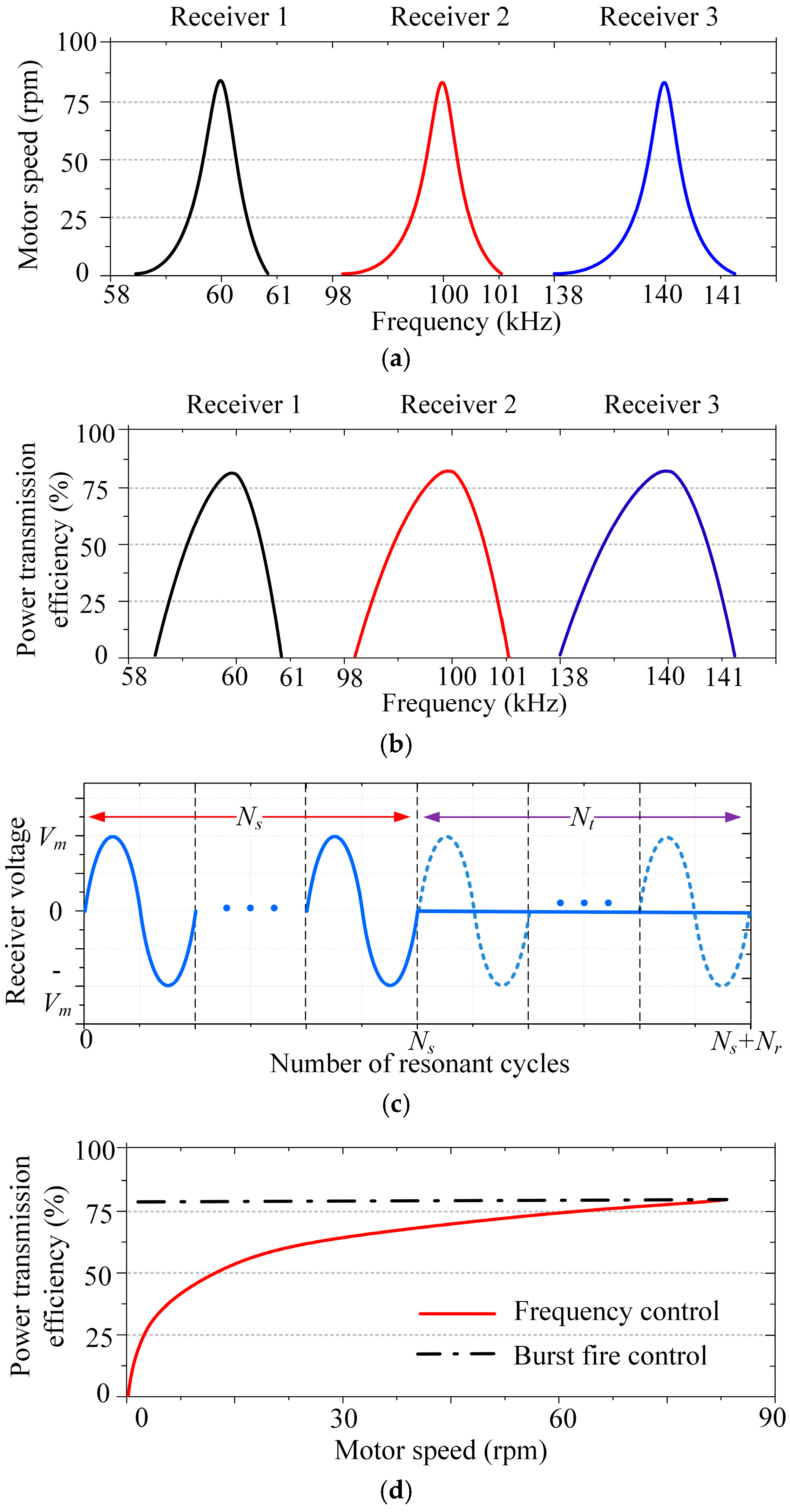
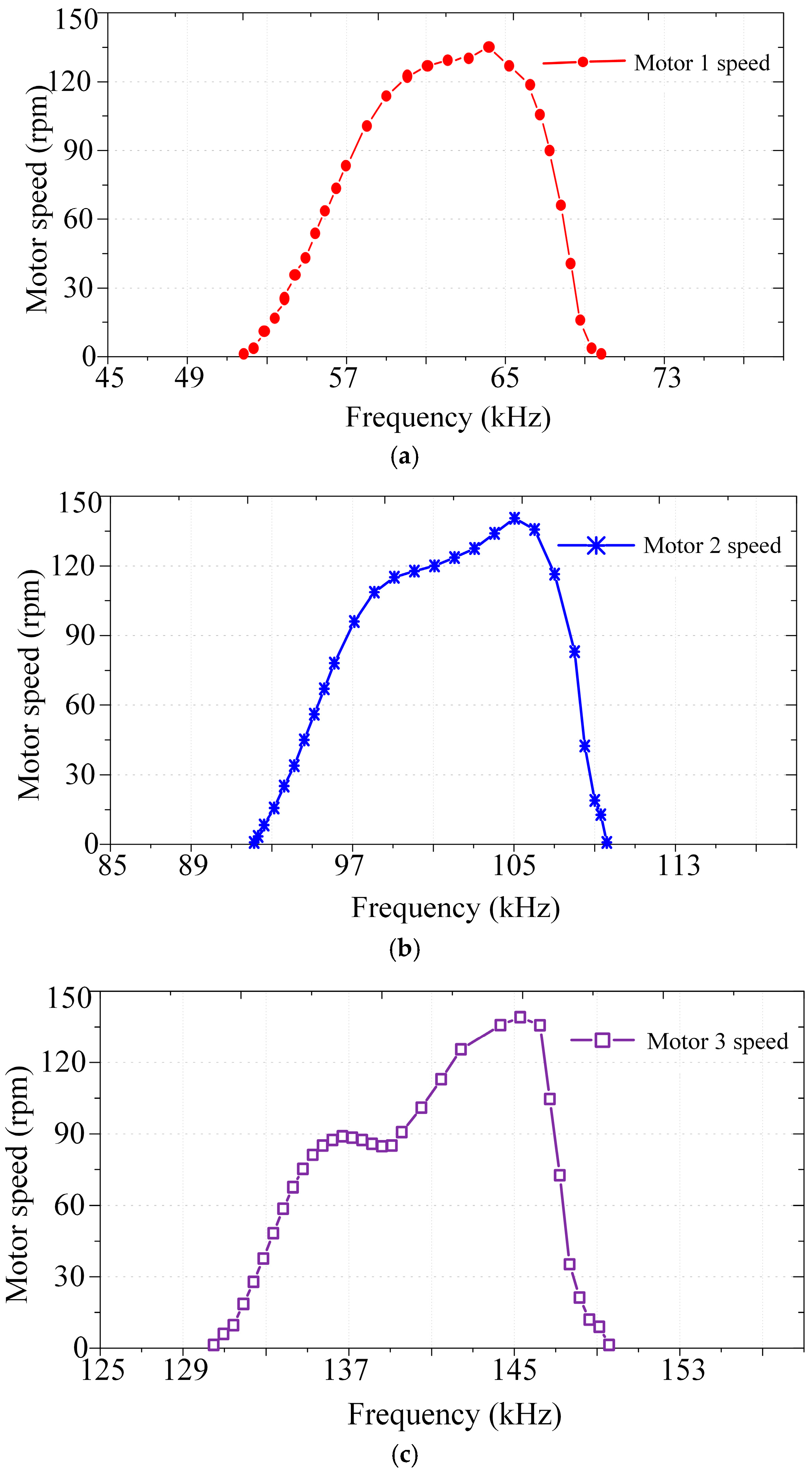
4.1. Selectability of DC Motor
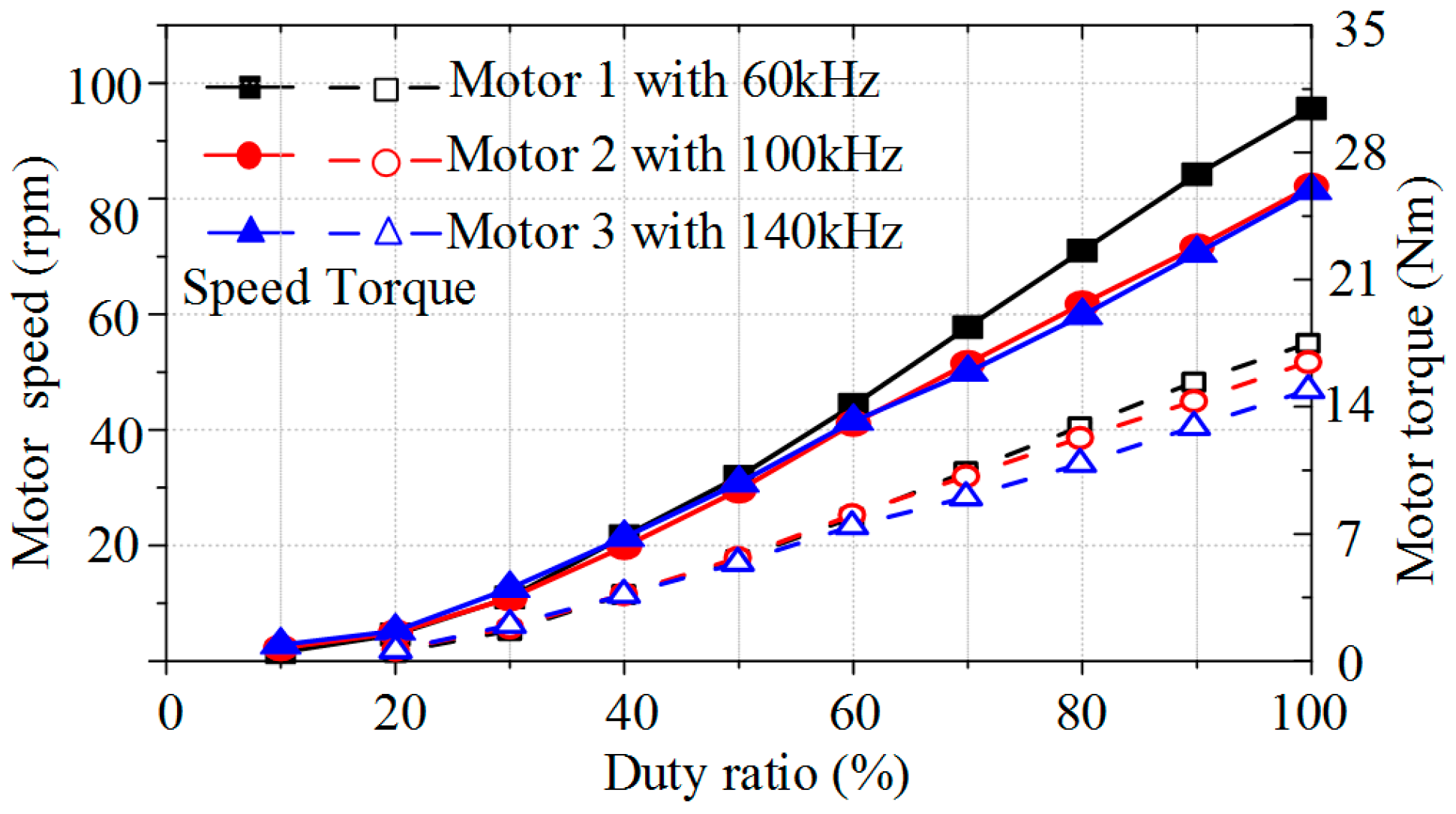
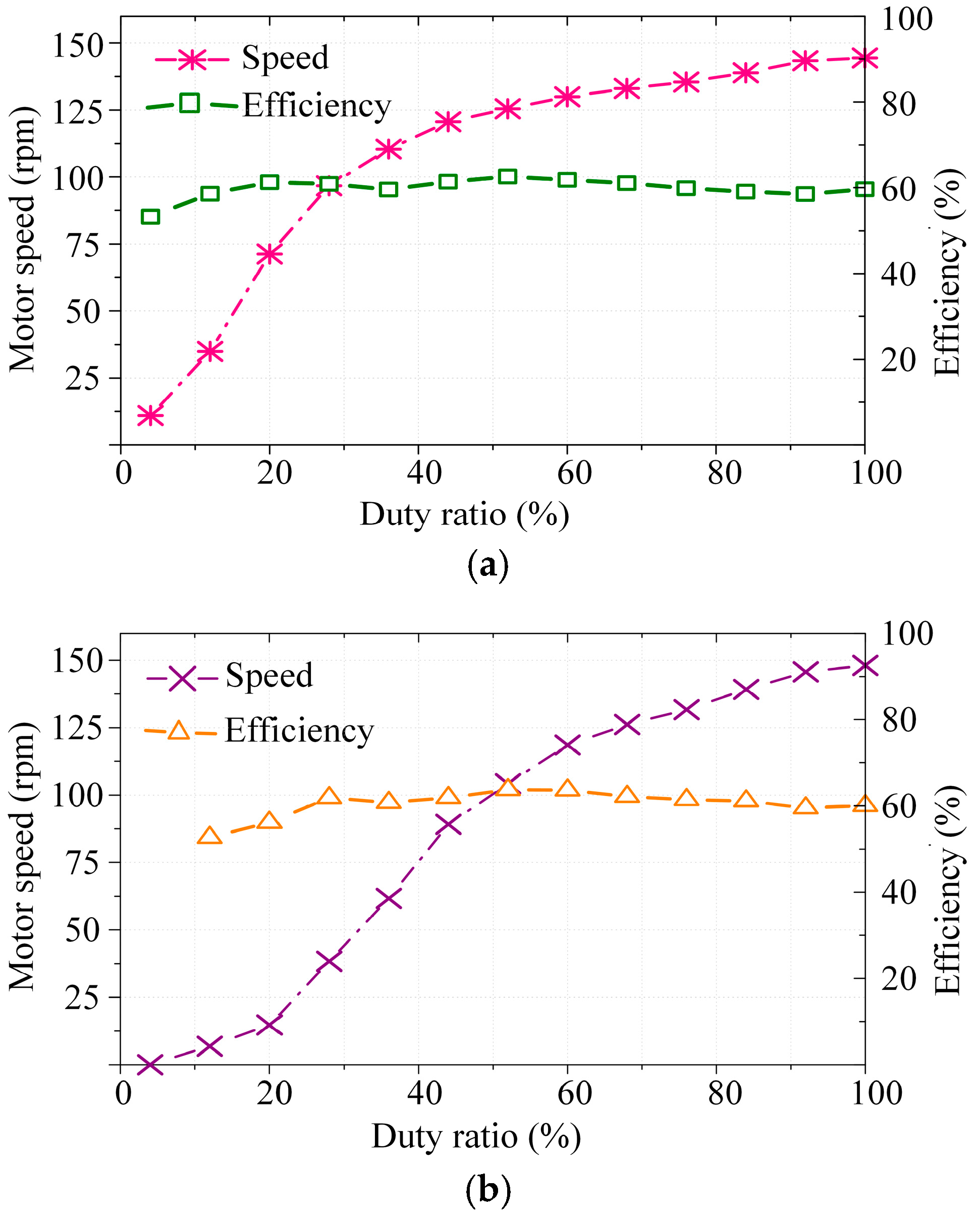
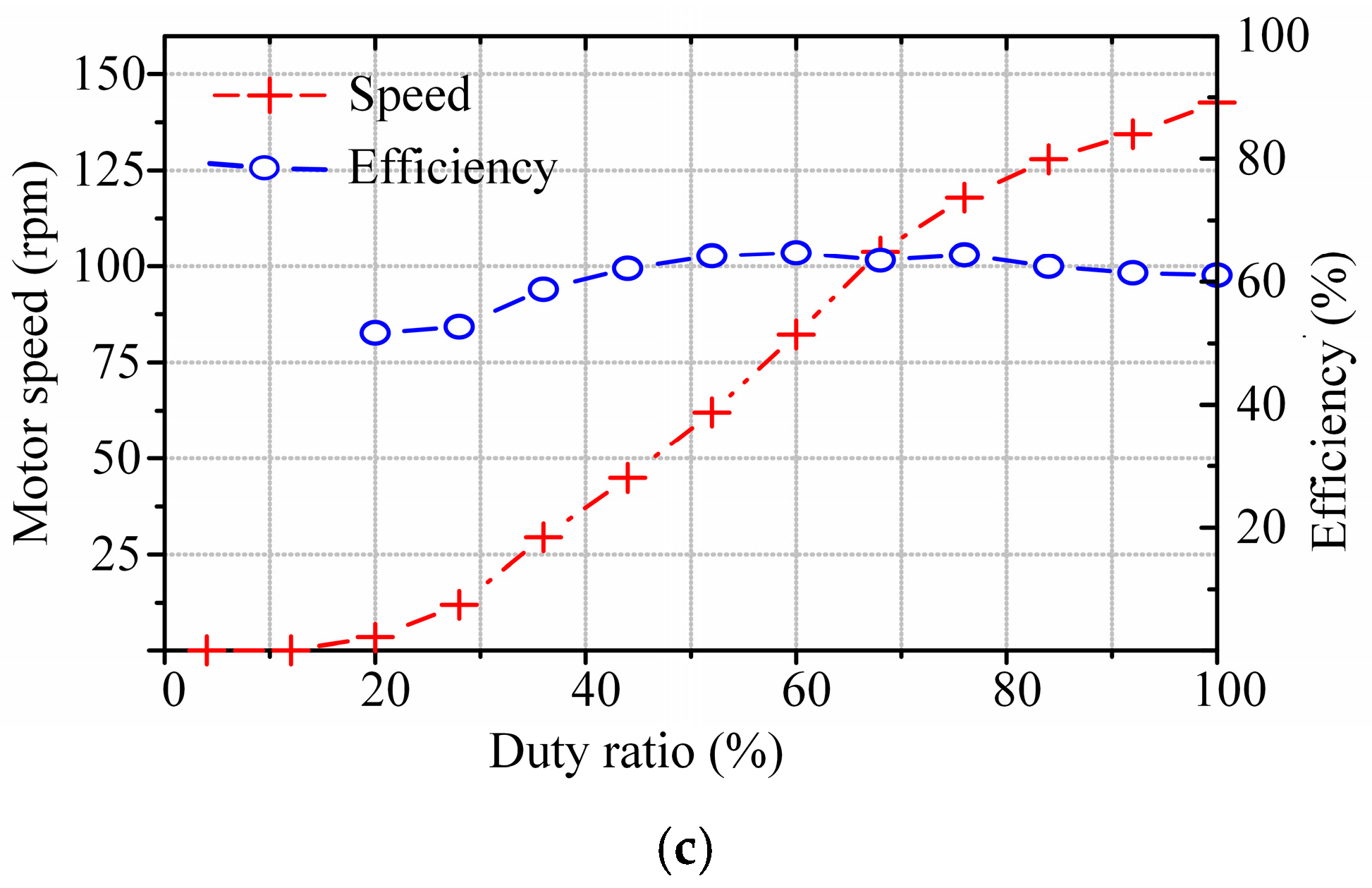
4.2. Controllability of DC Motor
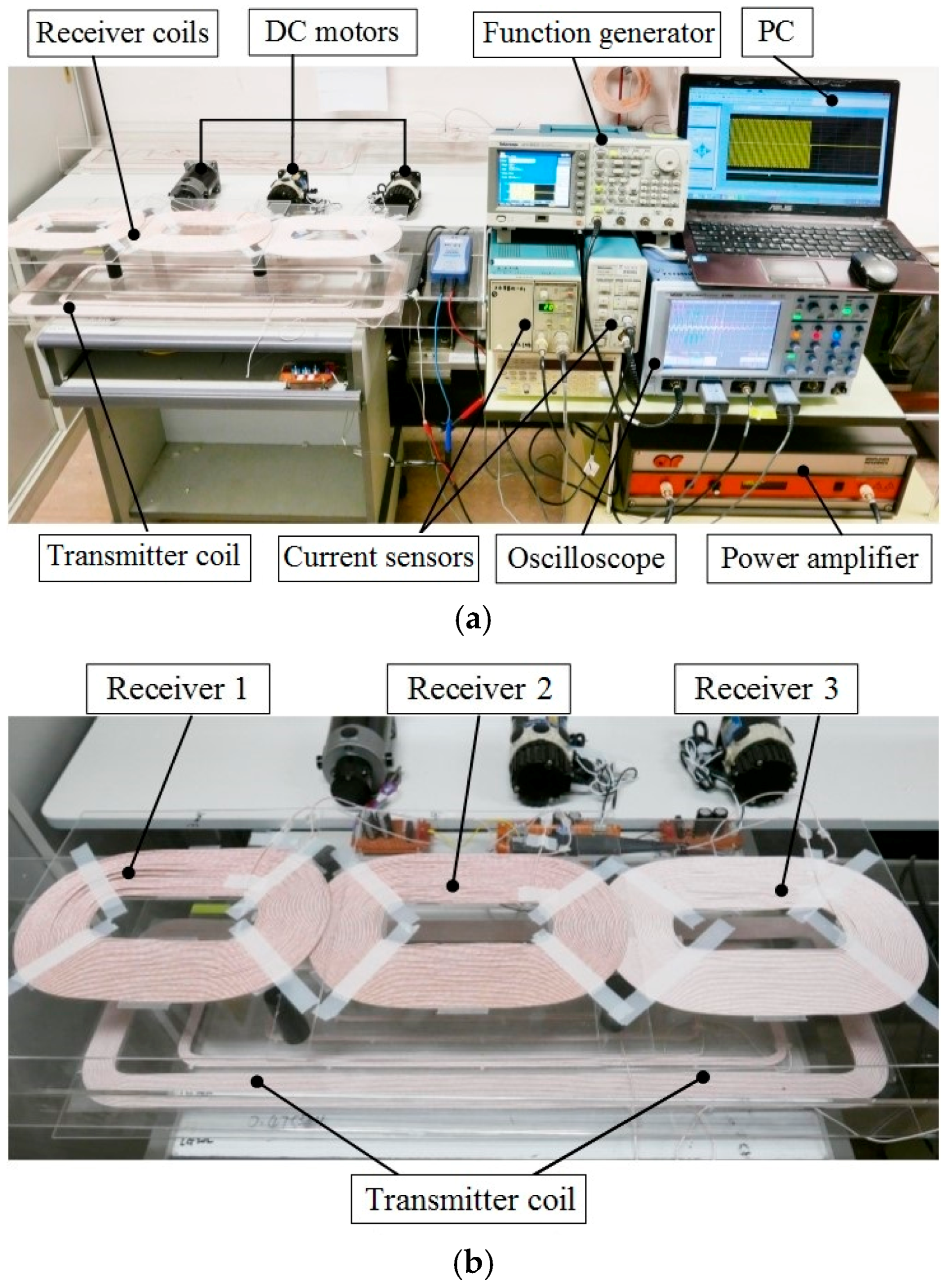
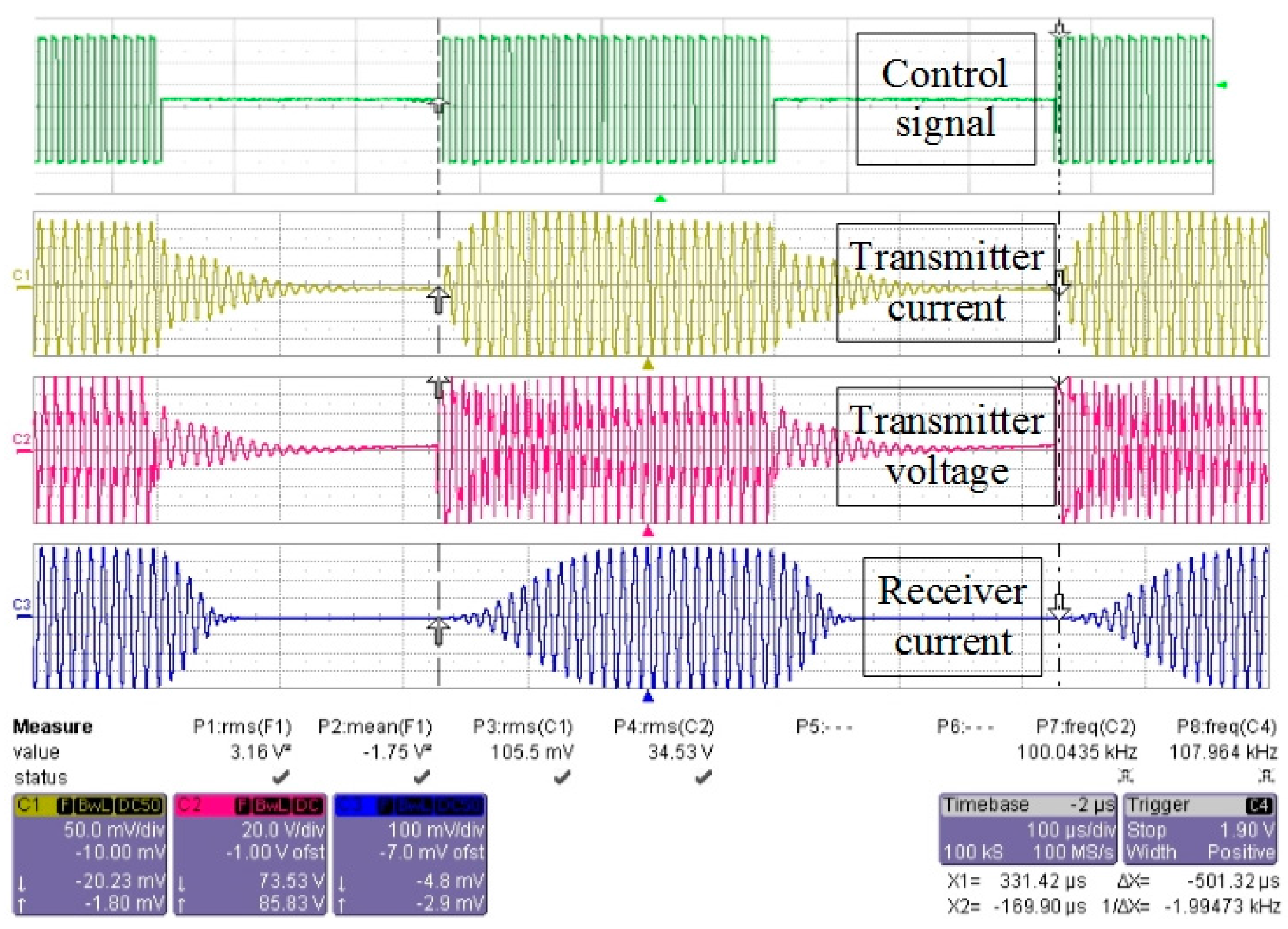
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Covic, G.A.; Boys, J.T. Inductive power transfer. Proc. IEEE 2013, 101, 1276–1289. [Google Scholar] [CrossRef]
- Mayordomo, I.; Drager, T.; Spies, P.; Bernhard, J.; Pflaum, A. An overview of technical challenges and advances of inductive wireless power transmission. Proc. IEEE 2013, 101, 1302–1311. [Google Scholar] [CrossRef]
- Hu, P.; Ren, J.; Li, W. Frequency-splitting-free synchronous tuning of close-coupling self-oscillating wireless power transfer. Energies 2016, 9, 491. [Google Scholar] [CrossRef]
- Tan, L.; Li, J.; Chen, C.; Yan, C.; Guo, J.; Huang, X. Analysis and performance improvement of WPT systems in the environment of single non-ferromagnetic metal plates. Energies 2016, 9, 576. [Google Scholar] [CrossRef]
- Keeling, N.A.; Covic, G.A.; Boys, J.T. A unity-power-factor IPT pickup for high-power applications. IEEE Trans. Ind. Electron. 2010, 57, 744–751. [Google Scholar] [CrossRef]
- RamRakhyani, A.K.; Mirabbasi, S.; Chiao, M. Design and optimization of resonance-based efficient wireless power delivery systems for biomedical implants. IEEE Trans. Biomed. Circuits Syst. 2011, 5, 48–63. [Google Scholar] [CrossRef] [PubMed]
- Vijith Vijayakumaran, N.; Choi, J.R. An integrated chip high-voltage power receiver for wireless biomedical implants. Energies 2015, 8, 5467–5487. [Google Scholar]
- Liu, C.H.; Chau, K.T.; Zhang, Z.; Qiu, C.; Lin, F.; Ching, T.W. Multiple-receptor wireless power transfer for magnetic sensors charging on Mars via magnetic resonant coupling. J. Appl. Phys. 2015, 117. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Chau, K.T.; Qiu, C.; Liu, C.H. Energy encryption for wireless power transfer. IEEE Trans. Power Electron. 2015, 30, 5237–5246. [Google Scholar] [CrossRef]
- Shekhar, A.; Prasanth, V.; Bauer, P.; Bolech, M. Economic viability study of an on-road wireless charging system with a generic driving range estimation method. Energies 2016, 9, 76. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.T. Modern advances in wireless power transfer systems for roadway powered electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, X.; Dai, H. Design and control of a 3 kW wireless power transfer system for electric vehicles. Energies 2016, 9, 10. [Google Scholar] [CrossRef]
- Hui, S.Y. Planar wireless charging technology for portable electronic products and Qi. Proc. IEEE 2013, 101, 1290–1301. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Meng, X.; Tsui, C.Y.; Ki, W.H. Reconfigurable resonant regulating rectifier with primary equalization for extended coupling-and loading-range in bio-implant wireless power transfer. IEEE Trans. Biomed. Circuits Syst. 2015, 9, 875–884. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Tang, H.; Zhang, Y. Determining the frequency for load-independent output current in three-coil wireless power transfer system. Energies 2015, 8, 9719–9730. [Google Scholar] [CrossRef]
- Ahn, D.; Hong, S. Effect of coupling between multiple transmitters or multiple receivers on wireless power transfer. IEEE Trans. Ind. Electron. 2013, 60, 2602–2613. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Zhu, X.; Luk, P.C.-K.; Ma, C. Compensation of cross coupling in multiple-receiver wireless power transfer systems. IEEE Trans. Ind. Inf. 2016, 12, 474–482. [Google Scholar] [CrossRef]
- Kim, Y.J.; Ha, D.; Chappell, W.J.; Irazoqui, P.P. Selective wireless power transfer for smart power distribution in a miniature-sized multiple-receiver system. IEEE Trans. Ind. Electron. 2016, 6, 1853–1862. [Google Scholar] [CrossRef]
- Hsu, J.U.W.; Hu, A.P.; Swain, A. Fuzzy logic-based directional full-range tuning control of wireless power pickups. IET Power Electron. 2012, 5, 773–781. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Lu, T.; Zhao, Z.M.; He, F.B.; Chen, K.N.; Yuan, L.Q. Selective wireless power transfer to multiple loads using receivers of different resonant frequencies. IEEE Trans. Power Electron. 2015, 30, 6001–6005. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, K.; He, F.; Zhao, Z.; Lu, T.; Yuan, L. Closed-form oriented modeling and analysis of wireless power transfer system with constant-voltage source and load. IEEE Trans. Power Electron. 2016, 31, 3472–3481. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Transmitter coil inductance (Lp) | 0.571 | mH |
| Receiver coil inductance (Ls1, Ls2, Ls3) | 0.253 | mH |
| Mutual inductance (M11, M12, M13) | 4.431 | μH |
| Transmitter resistance (Rp) | 1.5 | Ω |
| First receiver resonant capacitance (Cs1) | 12.323 | nF |
| Second receiver resonant capacitance (Cs2) | 4.436 | nF |
| Third receiver resonant capacitor (Cs3) | 2.263 | nF |
| Armature resistance of motor (Ra) | 1.2 | Ω |
| Receiver resistance (Rs1, Rs2, Rs3) | 0.3 | Ω |
| Supply voltage (Vs) | 60 | V |
| Electromagnetic torque (T) | 16 | Nm |
| Overall torque constant (KΦ) | 1.85 | Nm/A |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Chau, K.T.; Liu, C.; Han, W. Wireless DC Motor Drives with Selectability and Controllability. Energies 2017, 10, 49. https://doi.org/10.3390/en10010049
Jiang C, Chau KT, Liu C, Han W. Wireless DC Motor Drives with Selectability and Controllability. Energies. 2017; 10(1):49. https://doi.org/10.3390/en10010049
Chicago/Turabian StyleJiang, Chaoqiang, K.T. Chau, Chunhua Liu, and Wei Han. 2017. "Wireless DC Motor Drives with Selectability and Controllability" Energies 10, no. 1: 49. https://doi.org/10.3390/en10010049
APA StyleJiang, C., Chau, K. T., Liu, C., & Han, W. (2017). Wireless DC Motor Drives with Selectability and Controllability. Energies, 10(1), 49. https://doi.org/10.3390/en10010049