
Analyzing the Impacts of System Parameters on MPC-Based Frequency Control for a Stand-Alone Microgrid



Abstract
:1. Introduction
2. Stand-Alone MG and MPC-Based Secondary Frequency Control
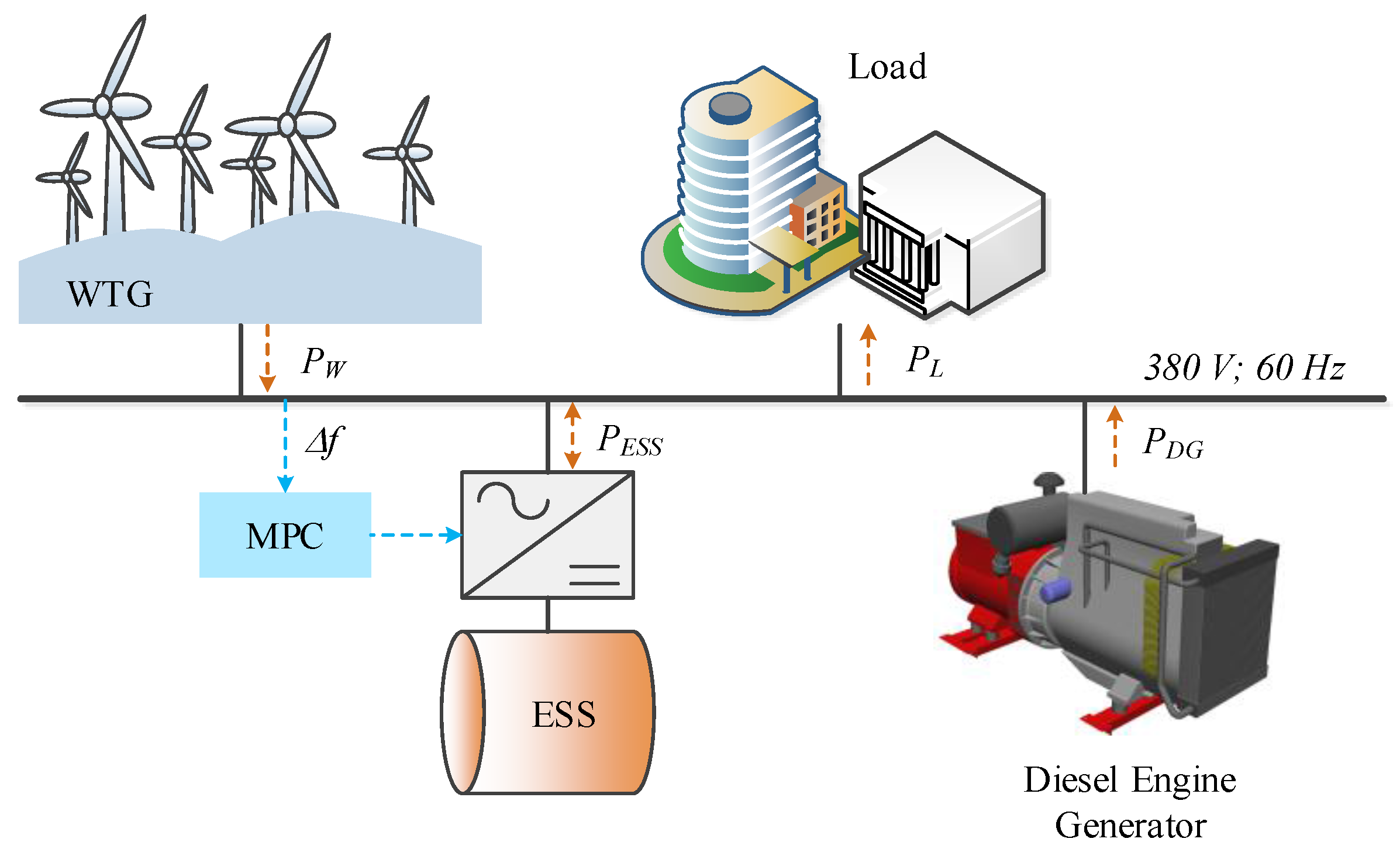
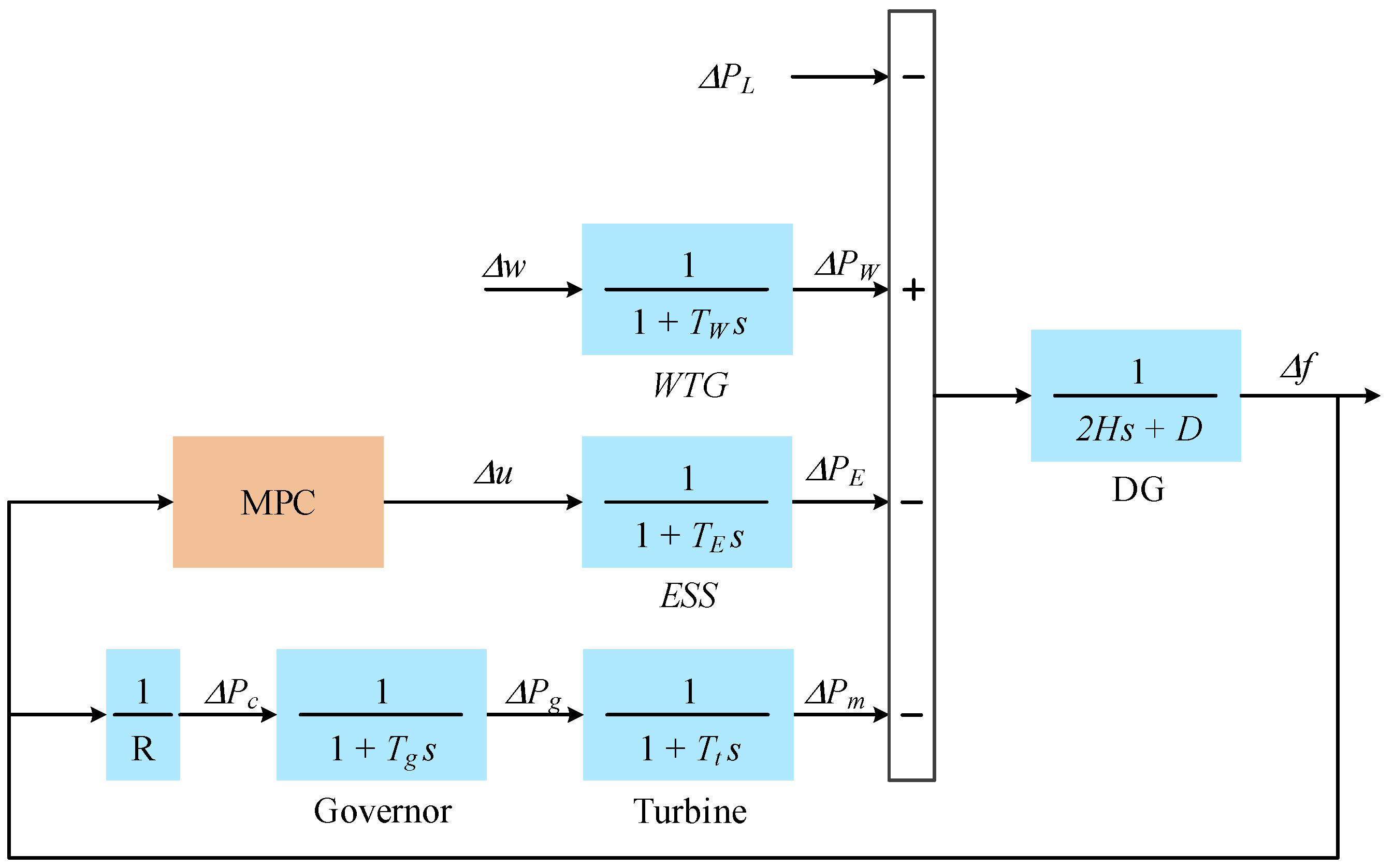
2.1. Stand-Alone MG
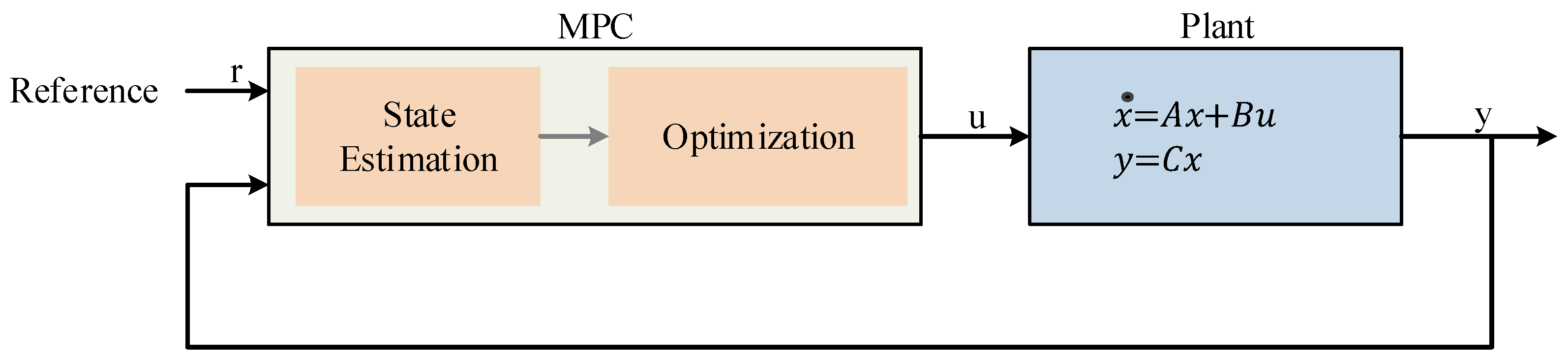
2.2. Designing MPC-Based Secondary Frequency Control
3. Simulation Results
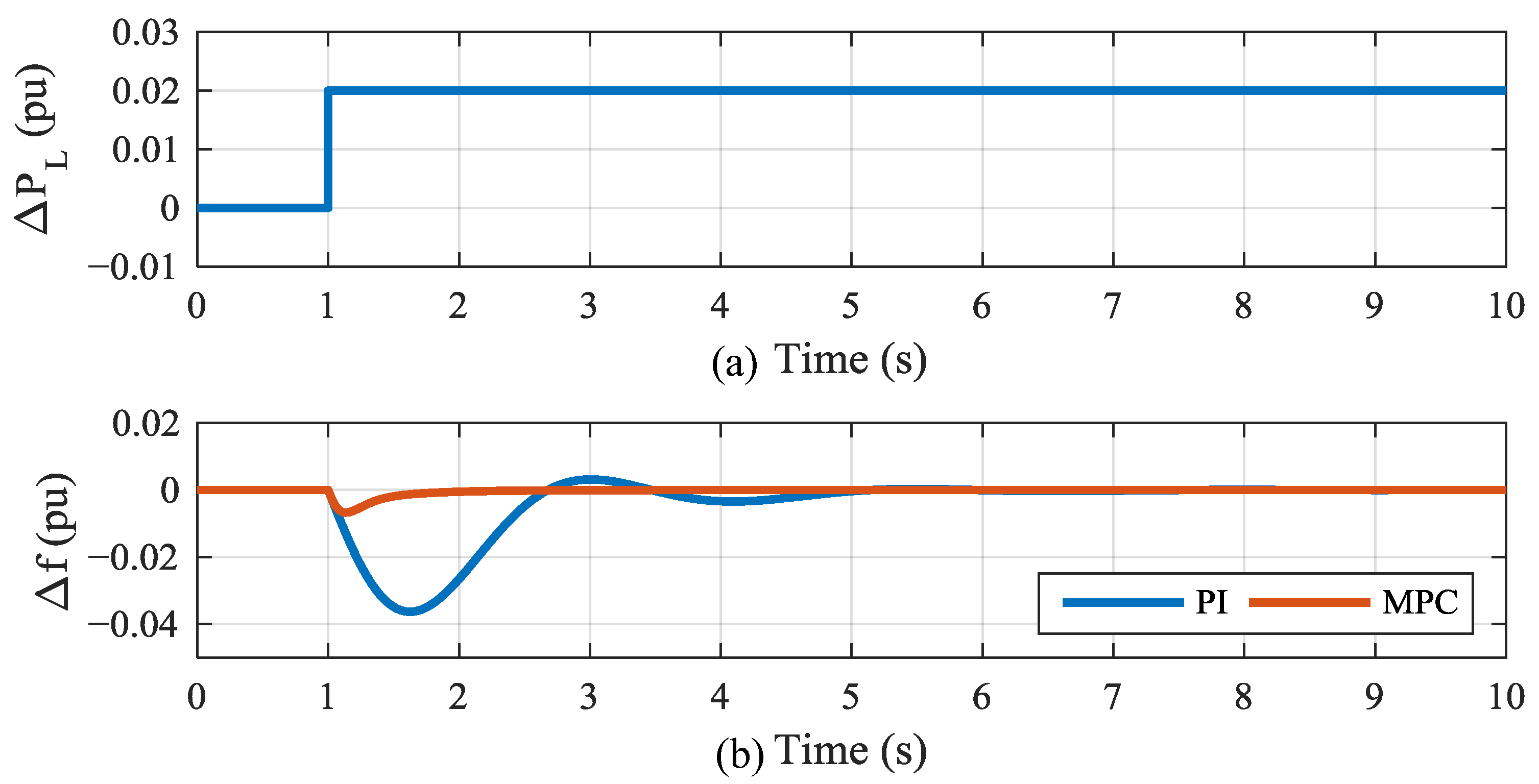
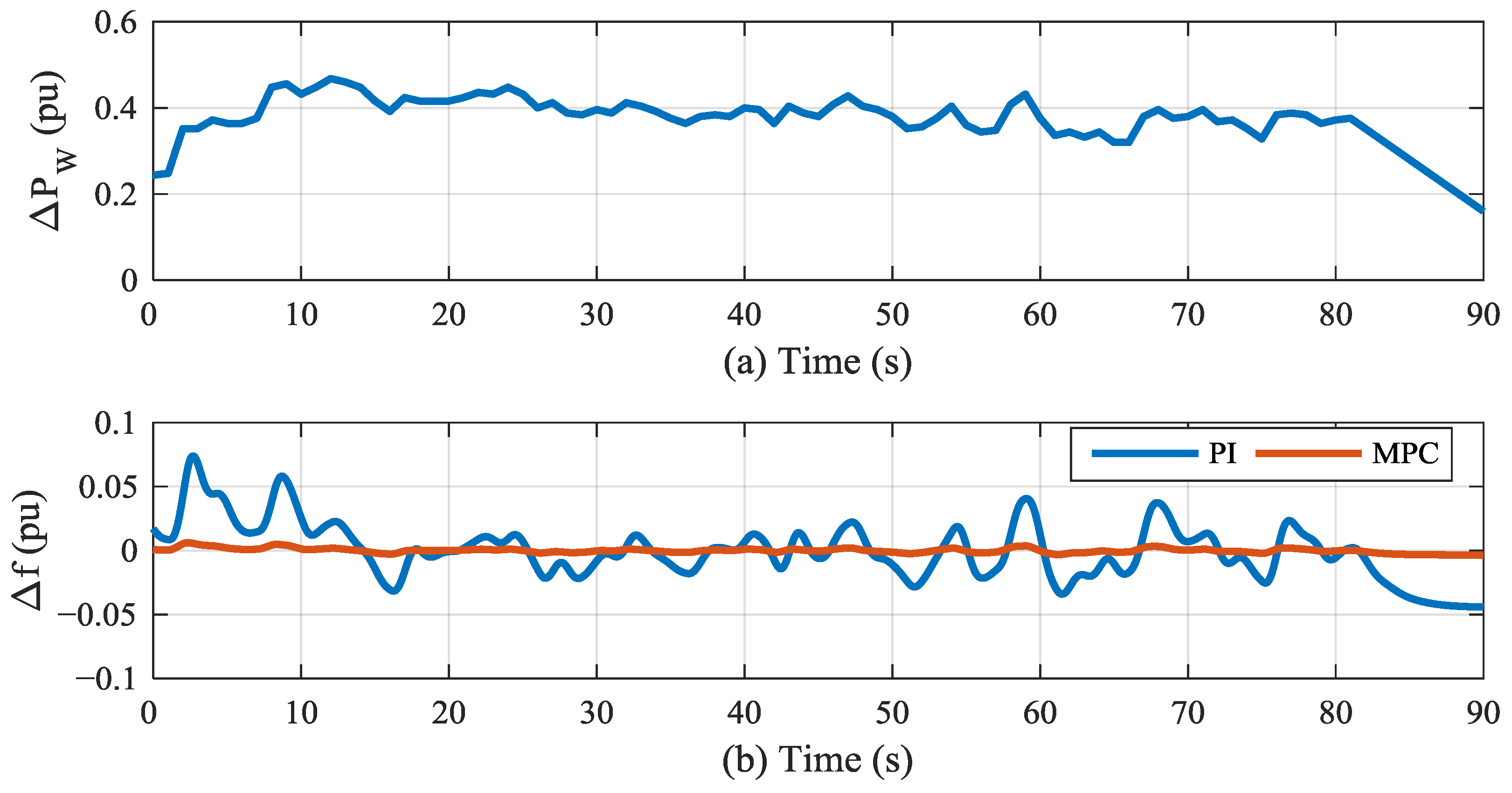
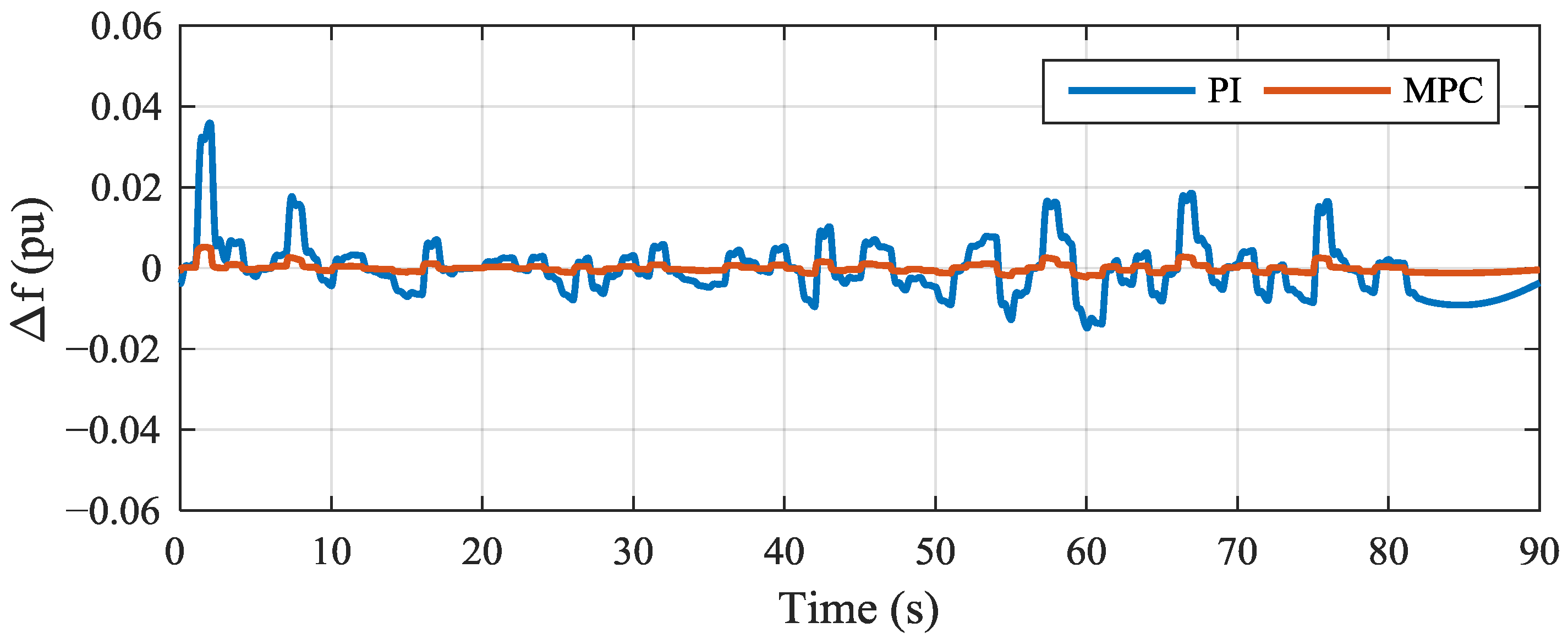
3.1. Load Change and Wind Fluctuations
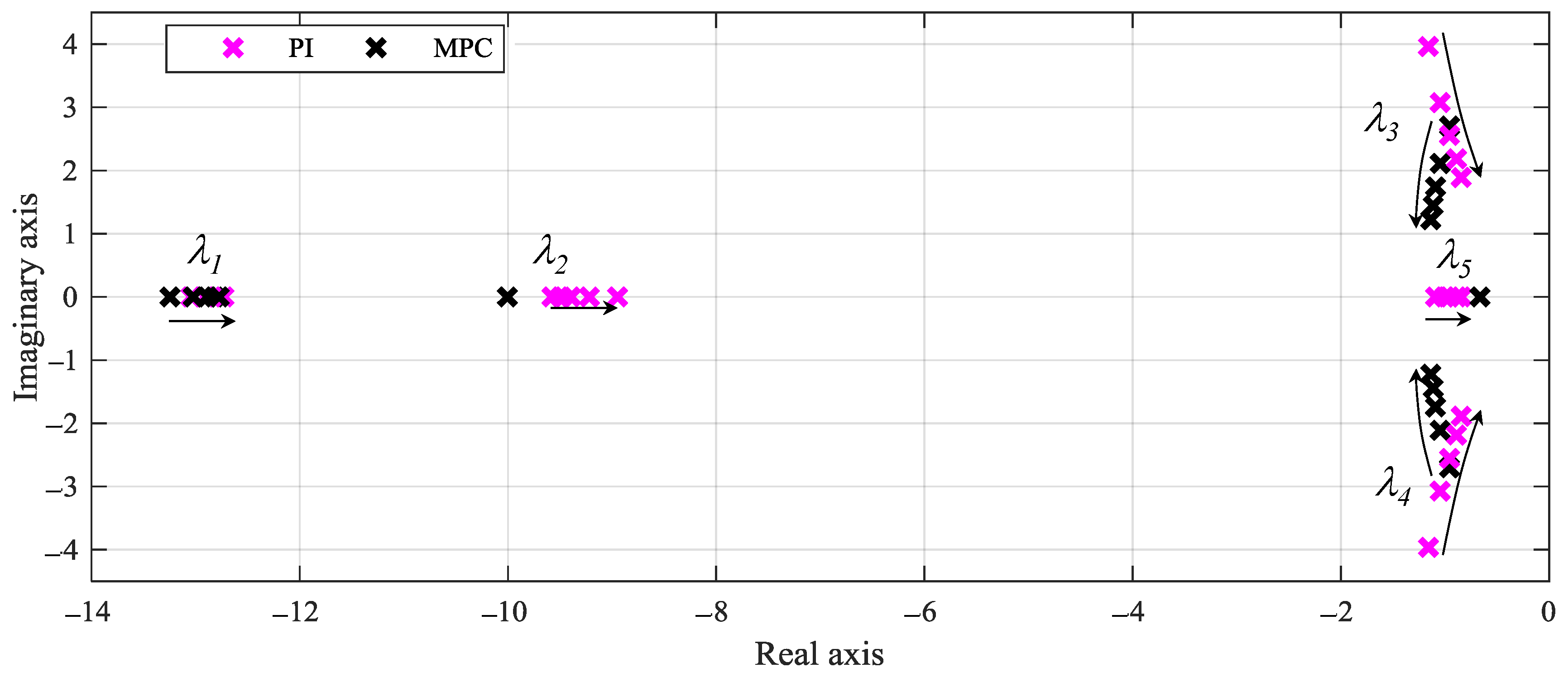
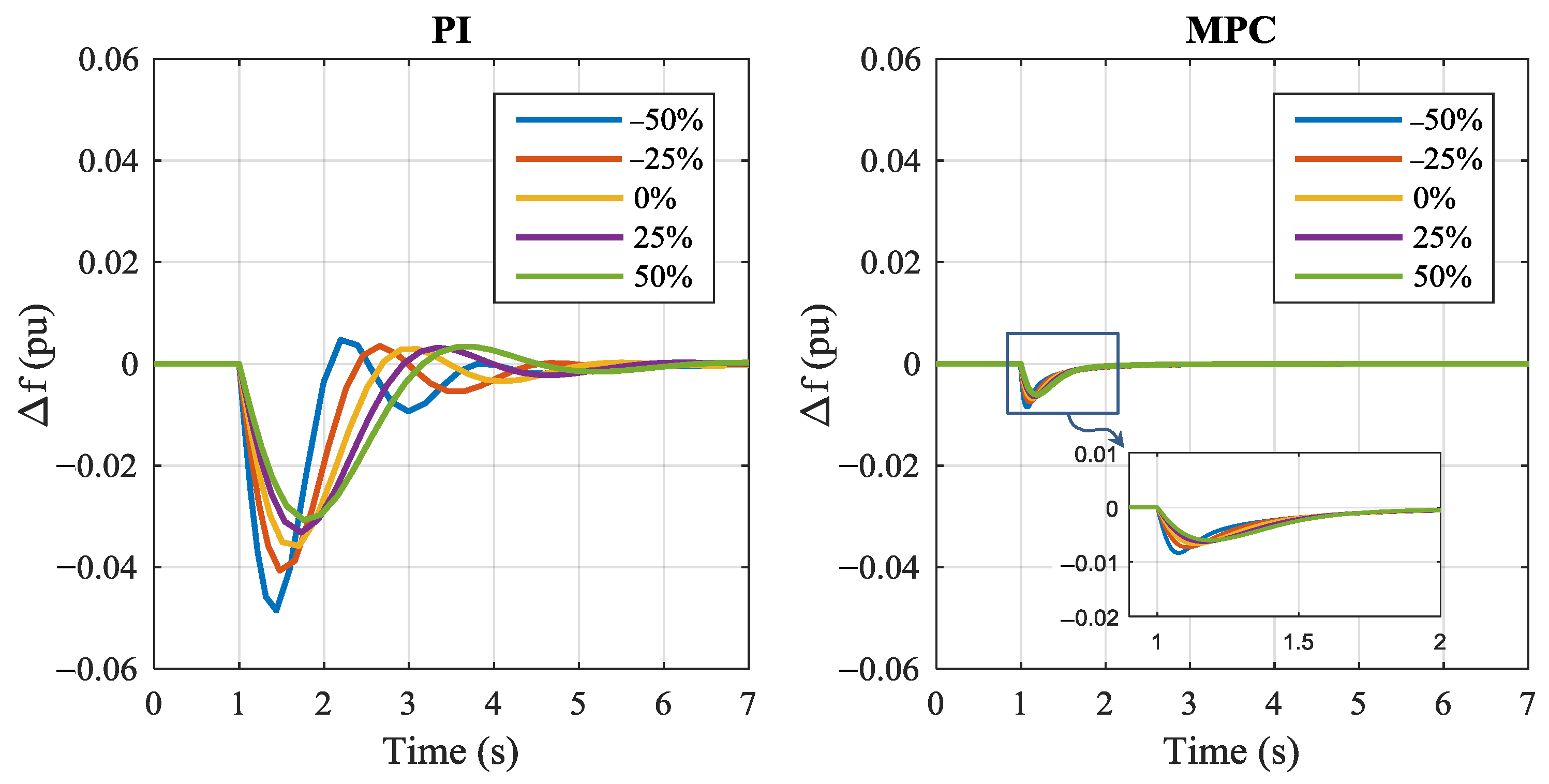
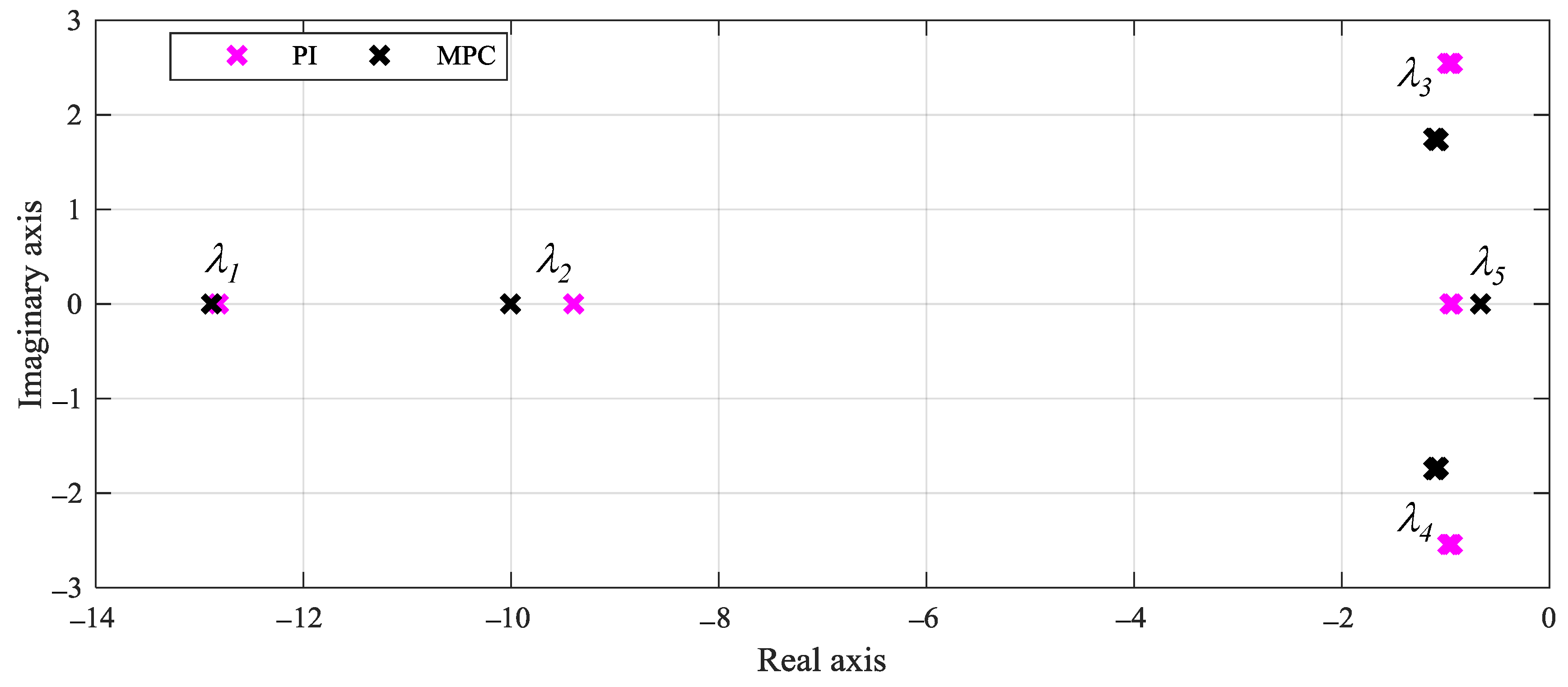
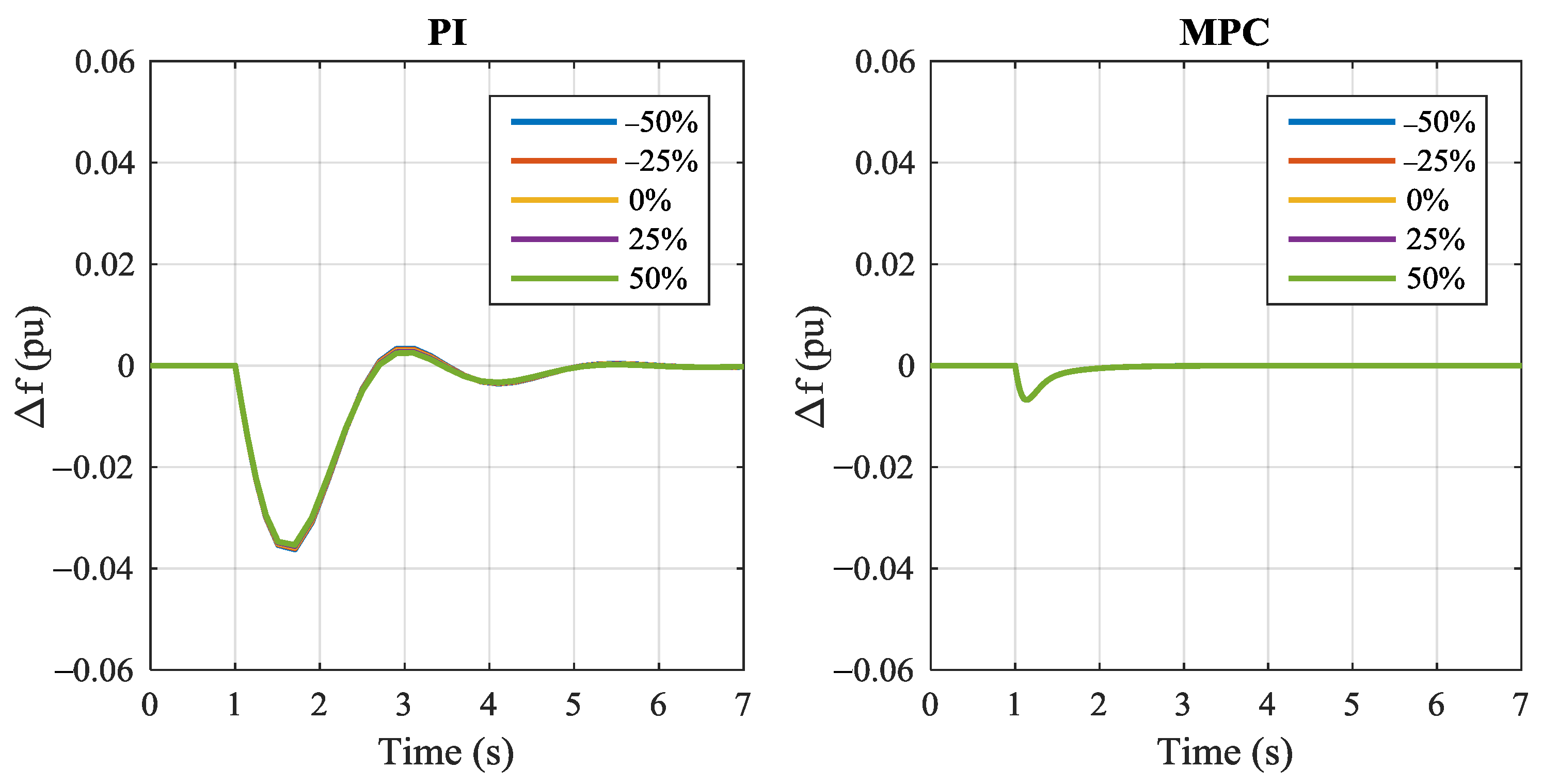
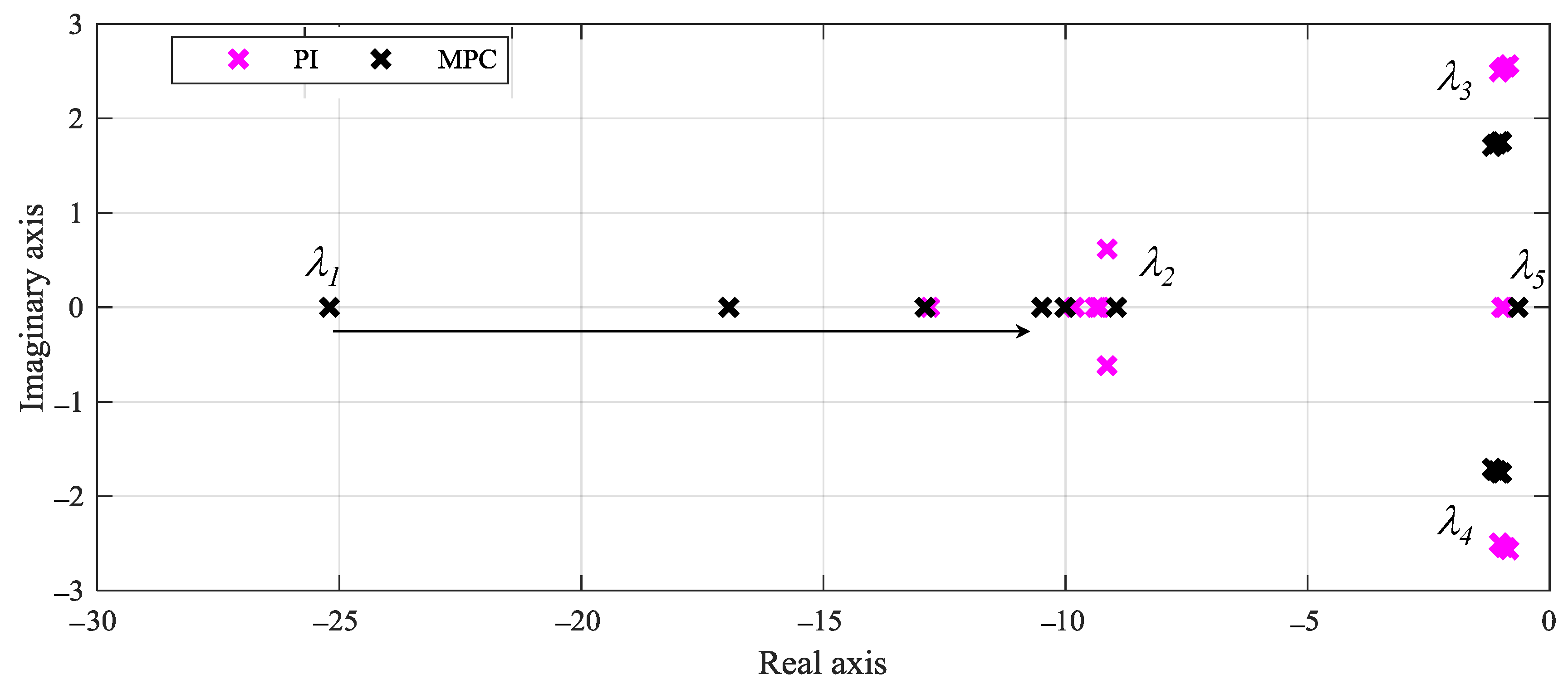
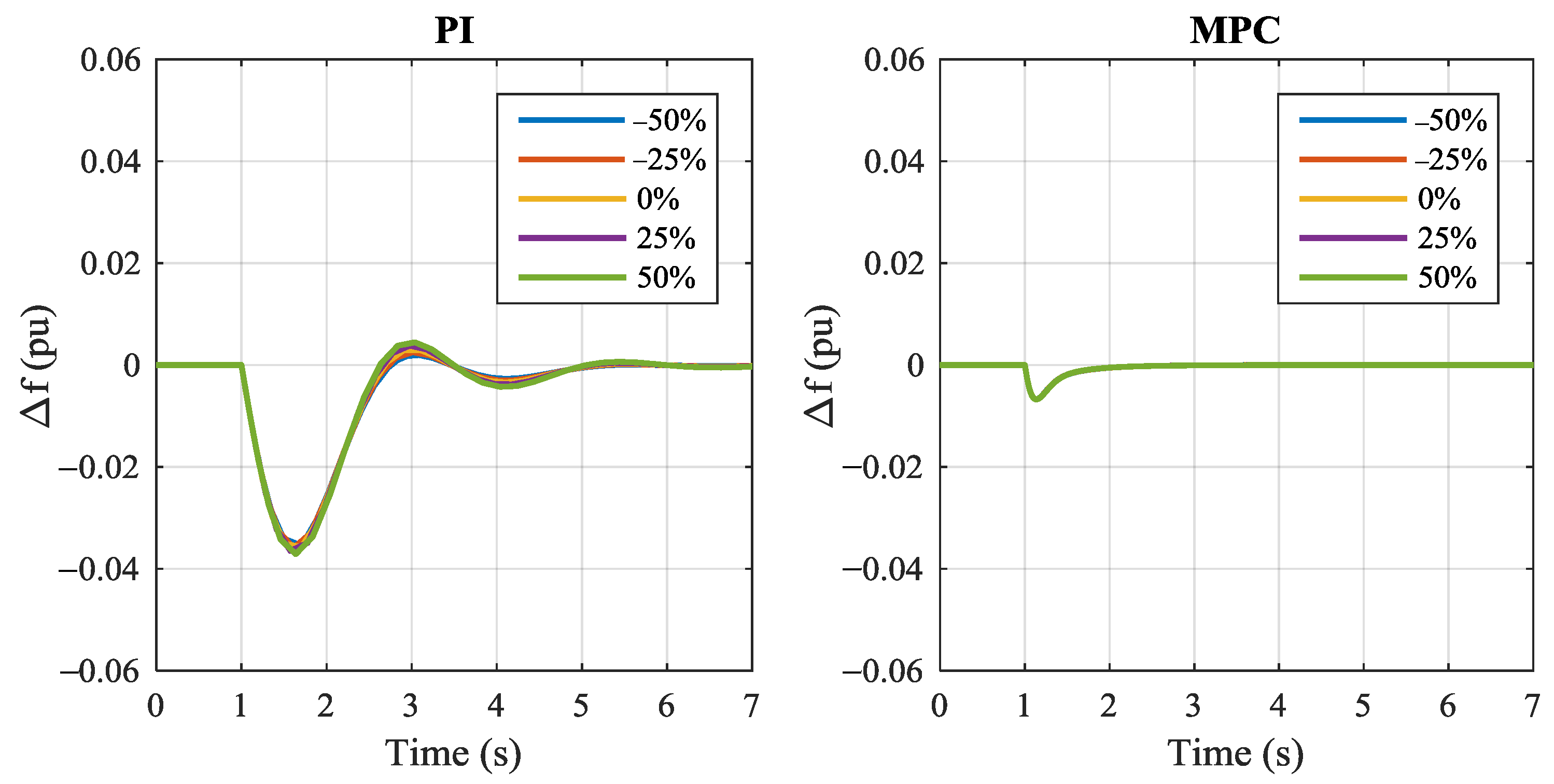
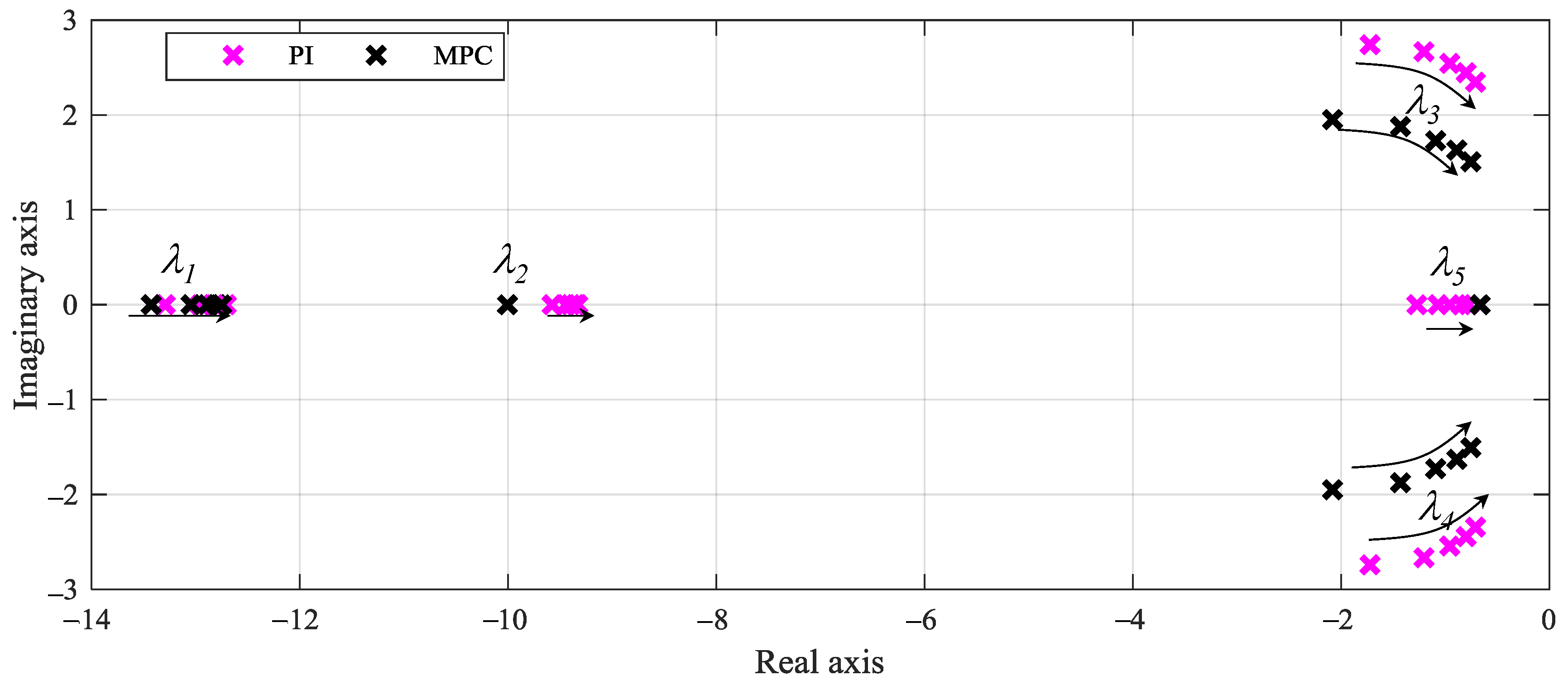
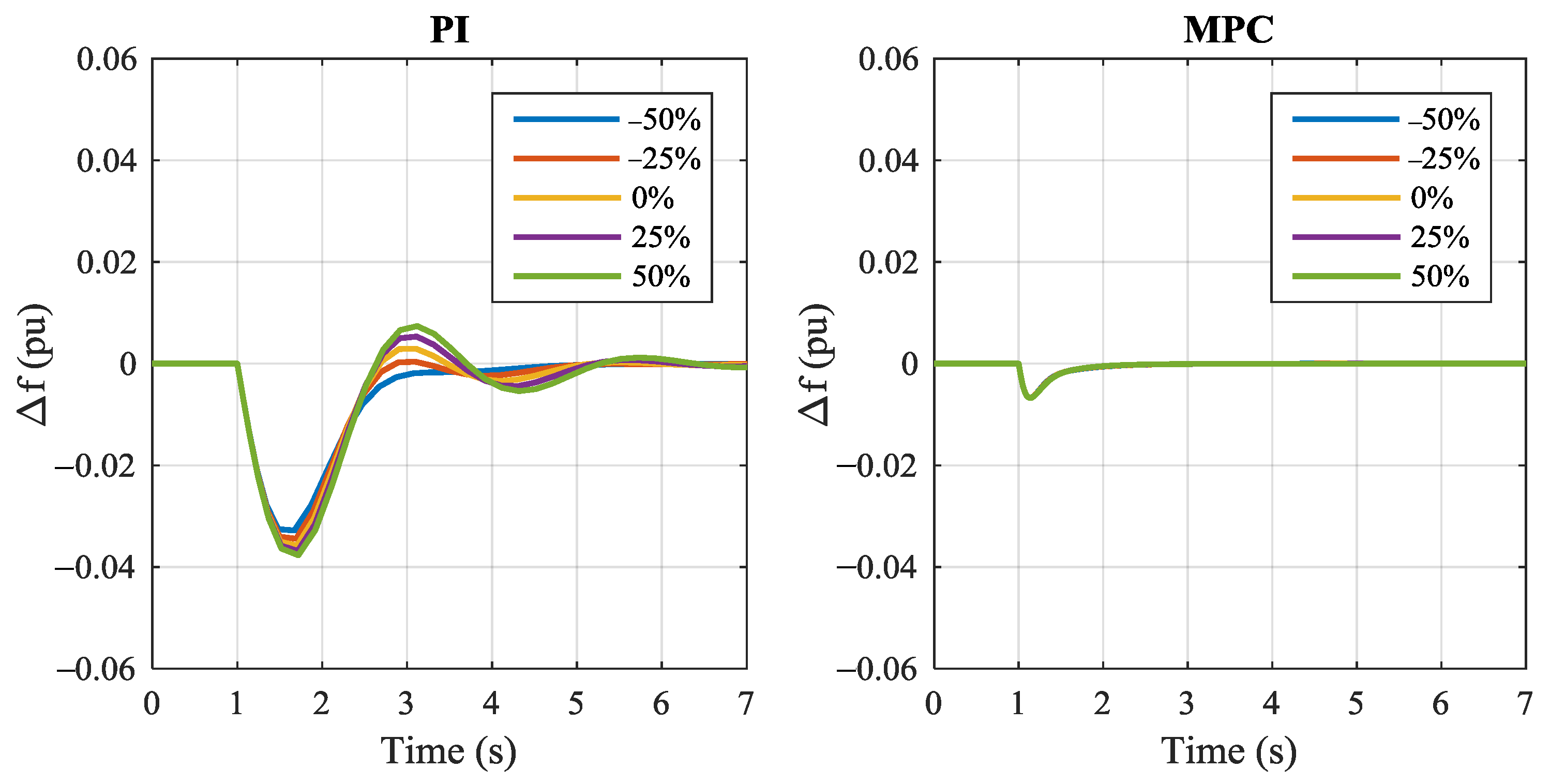
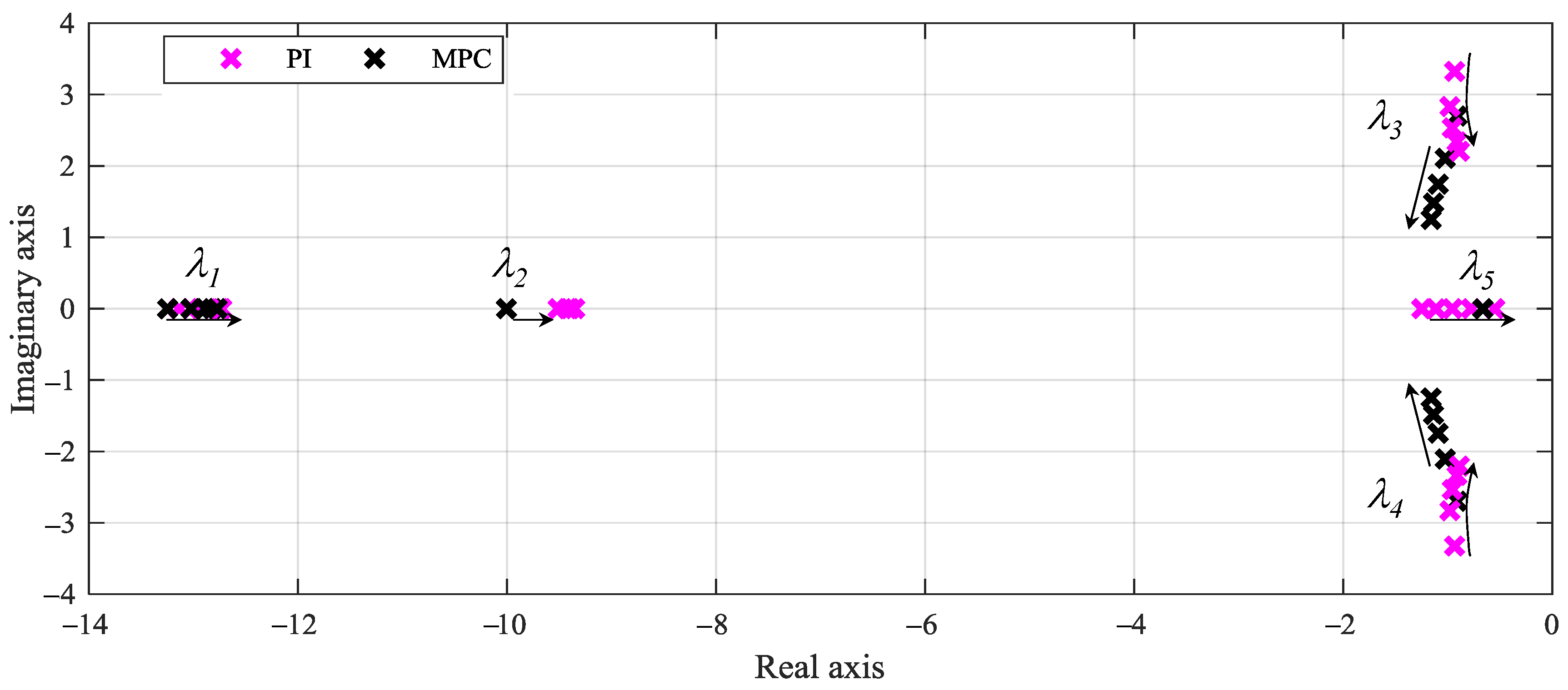
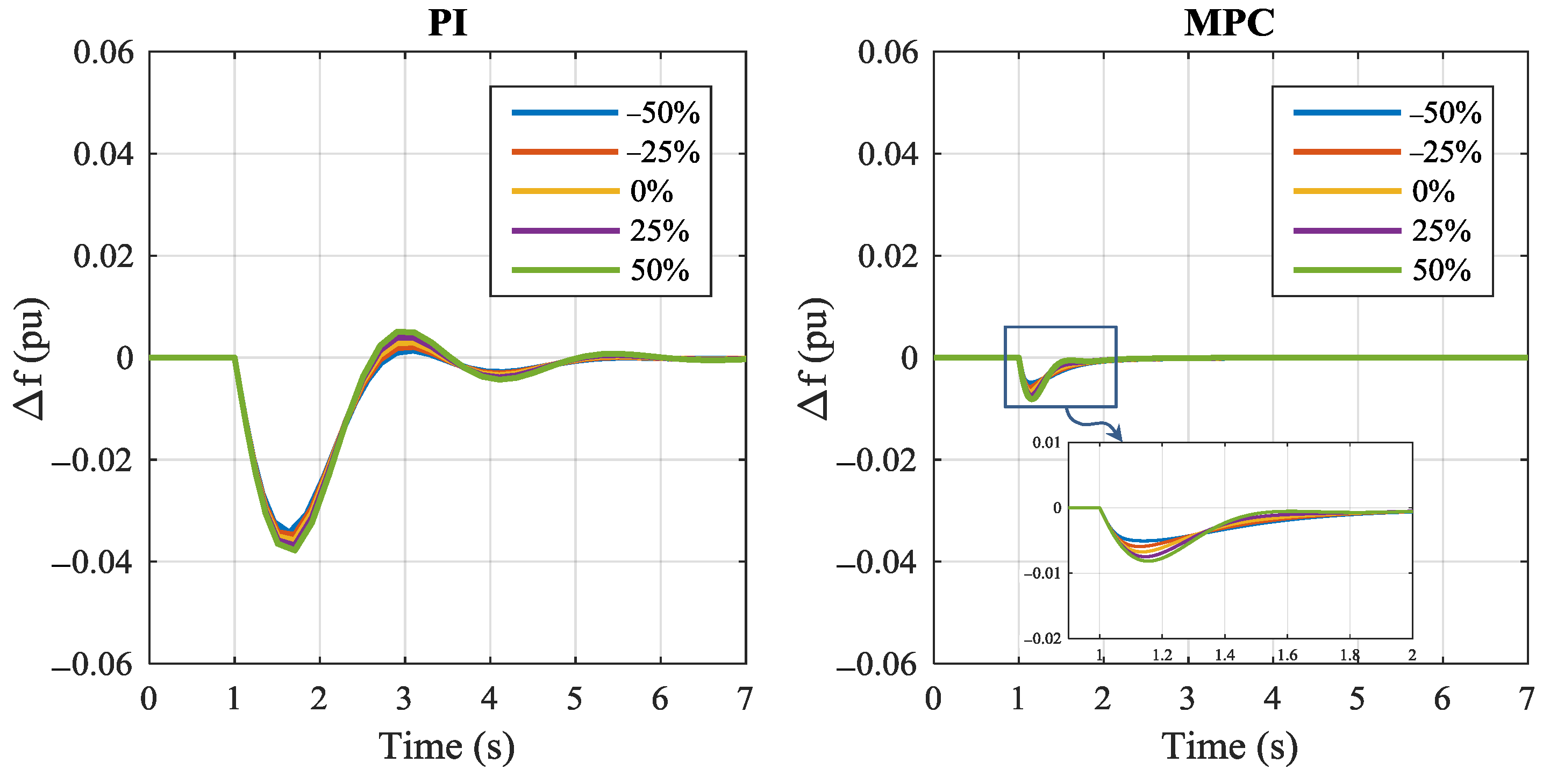
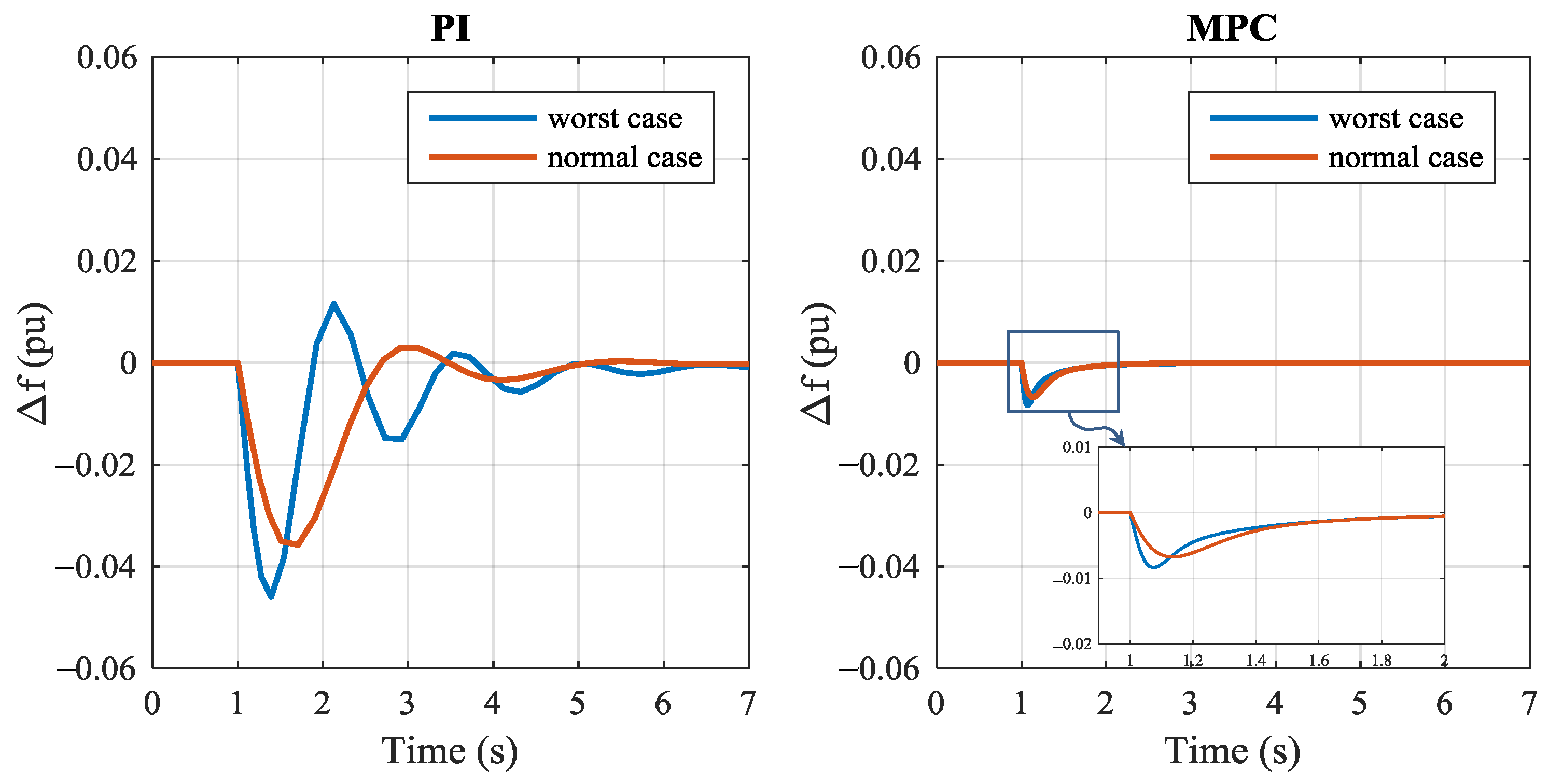
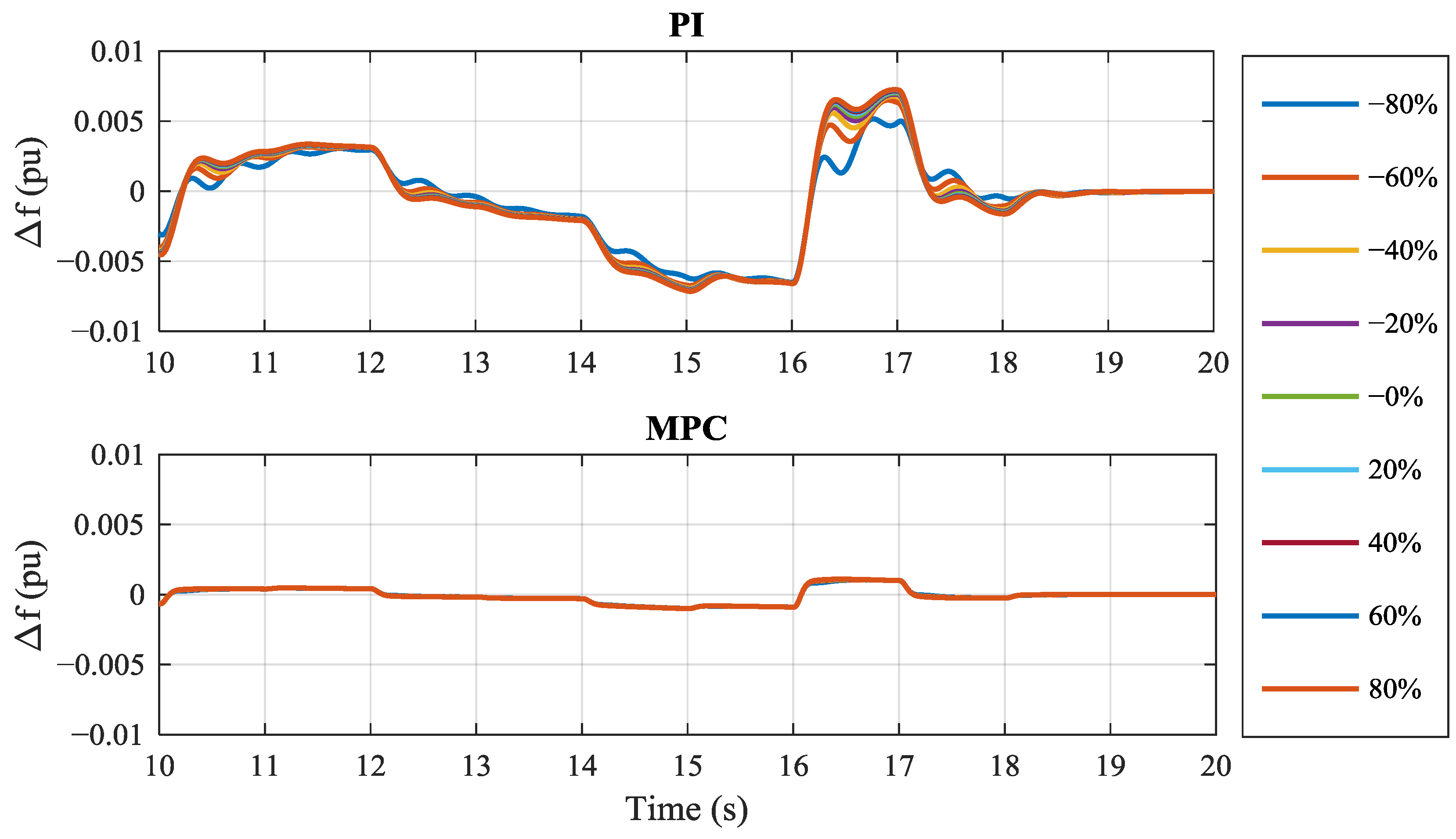
3.2. Impacts of System Parameters on MPC
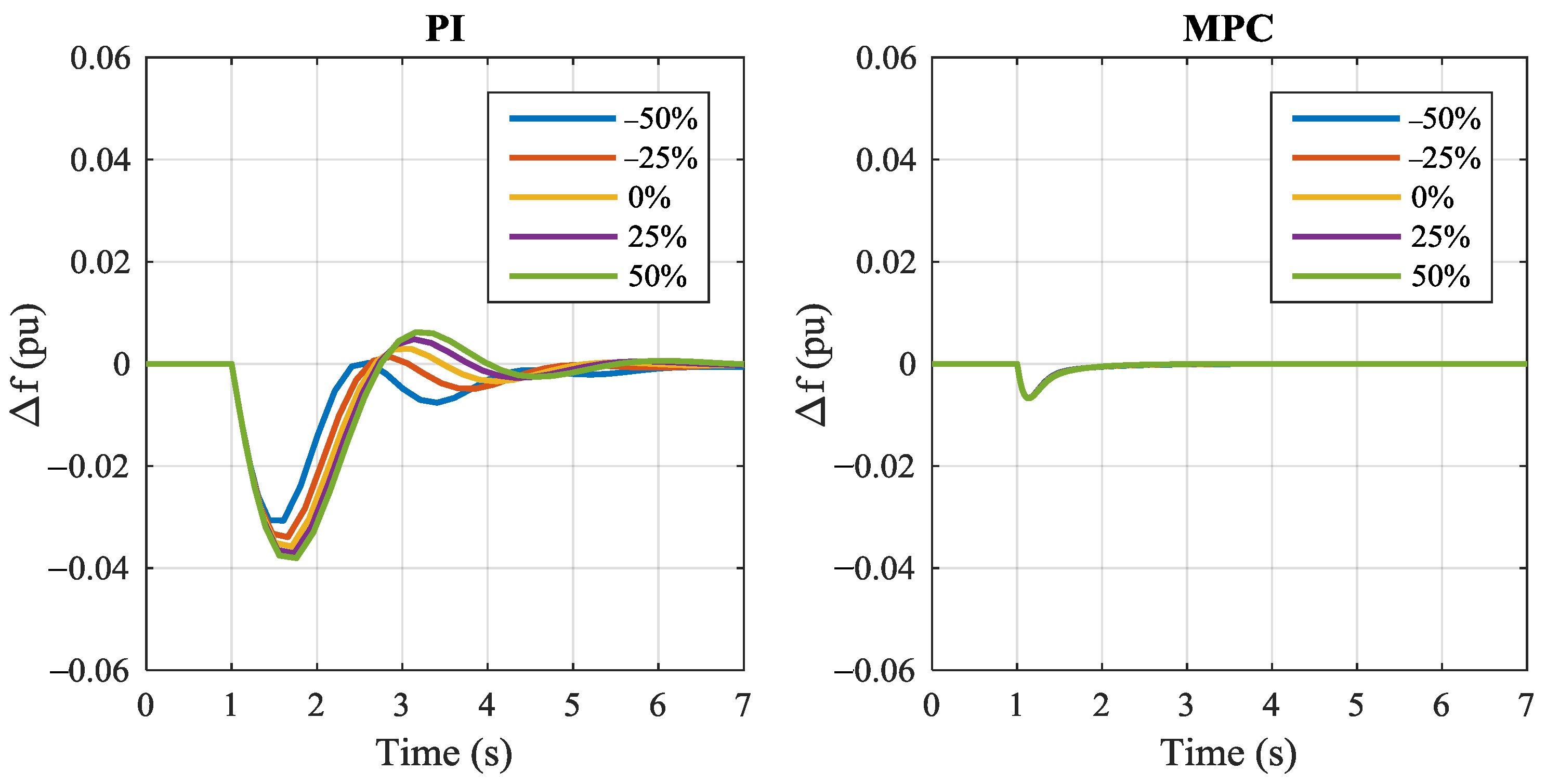
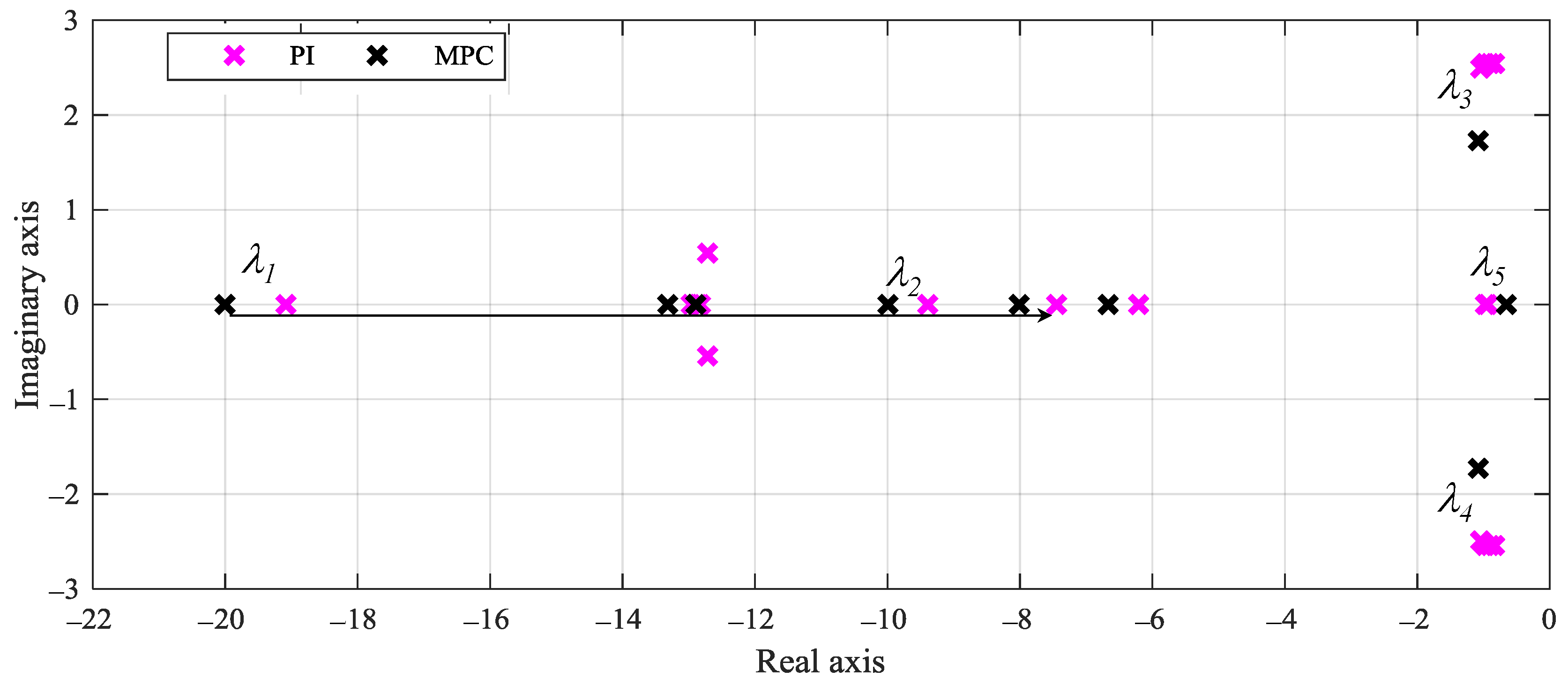
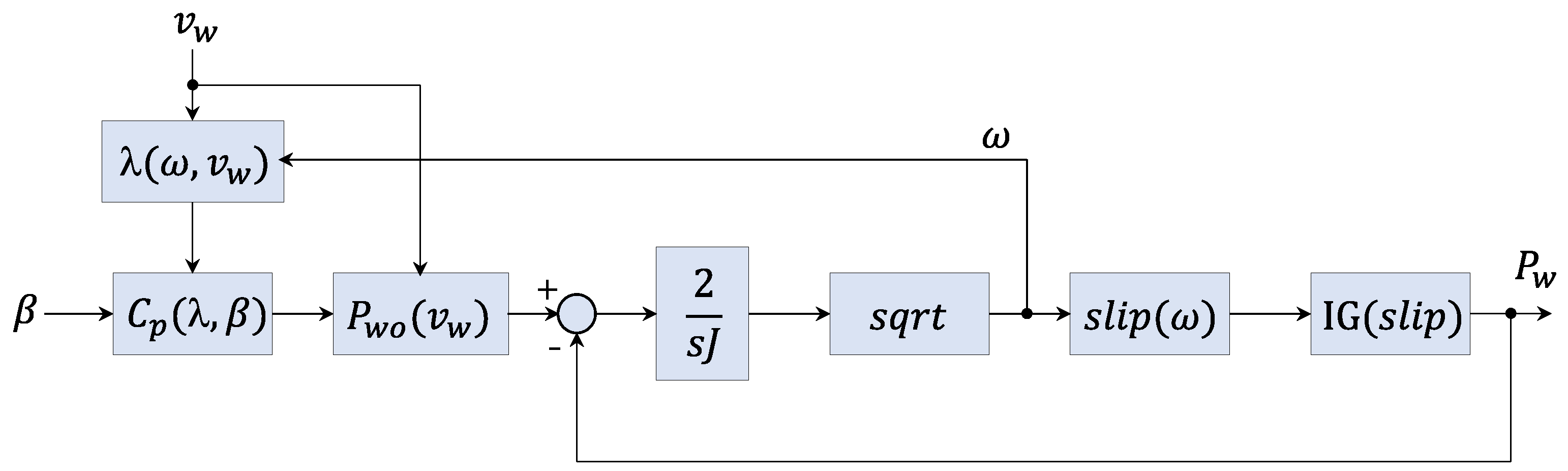
3.3. Impacts of the Wind Generator Model on MPC
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| System parameters | |
| H | Inertial time constant of diesel generator |
| D | Load damping |
| R | Droop constant |
| Tt | Turbine time constant |
| Tg | Governor time constant |
| TE | ESS time constant |
| TW | Time constant of wind generator |
| ΔPL | Load deviation |
| ΔPm | The change of mechanical power |
| ΔPE | The change of ESS power |
| ΔPW | The change of wind power |
| Δw | The change of wind speed |
| ΔPg | The change of governor output |
| ΔPc | The change of primary control output |
| Δf | Frequency deviation |
| Parameters of WTG based on DFIG | |
| Cross section of rotor for windmill | |
| Cp | Power coefficient of windmill |
| λ | Tip speed ratio |
| ρ | Air density |
| J | Moment of inertia for windmill |
| Wind speed | |
| Wind power output | |
| Windmill power output | |
| Radius of windmill | |
| Synchronous angular speed | |
| Angular rotor speed | |
| V | Phase voltage of generator |
| X1, X2 | Reactance of stator and rotor, respectively |
| R1, R2 | Resistance of stator and rotor, respectively |
References
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Gu, W.; Liu, W.; Wu, Z.; Zhao, B.; Chen, W. Cooperative Control to Enhance the Frequency Stability of Islanded Microgrids with DFIG-SMES. Energies 2013, 6, 3951–3971. [Google Scholar] [CrossRef]
- Unamuno, E.; Barrena, J.A. Equivalence of Primary Control Strategies for AC and DC Microgrids. Energies 2017, 10, 91. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Kim, E.-S.; Moon, S.-I. Frequency and Voltage Control Strategy of Standalone Microgrids with High Penetration of Intermittent Renewable Generation Systems. IEEE Trans. Power Syst. 2016, 31, 718–728. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Hwang, C.-S.; Kim, E.-S.; Cho, C. State of Charge-Based Active Power Sharing Method in a Standalone Microgrid with High Penetration Level of Renewable Energy Sources. Energies 2016, 9, 480. [Google Scholar] [CrossRef]
- Jang, Y.-S.; Park, J.; Yoon, Y.T. Designing Structure-Dependent MPC-Based AGC Schemes Considering Network Topology. Energies 2015, 8, 3437–3454. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Vasquez, J.C.; Kooning, J.D.; Guerrero, J.M.; Vandevelde, L. Microgrids: Hierarchical Control and an Overview of the Control and Reserve Management Strategies. IEEE Ind. Electron. Mag. 2013, 7, 42–55. [Google Scholar] [CrossRef]
- Yang, J.-S.; Choi, J.-Y.; An, G.-H.; Choi, Y.-J.; Kim, M.-H.; Won, D.-J. Optimal Scheduling and Real-Time State-of-Charge Management of Energy Storage System for Frequency Regulation. Energies 2016, 9, 1010. [Google Scholar] [CrossRef]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.-F.; Abdel-Gawad, A.F.; Yona, A. A Frequency Control Approach for Hybrid Power System Using Multi-Objective Optimization. Energies 2017, 10, 80. [Google Scholar] [CrossRef]
- Bevrani, H.; Habibi, F.; Babahajyani, P.; Watanabe, M.; Mitani, Y. Intelligent Frequency Control in an AC microgrid: Online PSO-based fuzzy tuning approach. IEEE Trans. Smart Grid 2012, 3, 1935–1944. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Kim, H.-M.; Kim, S.-K.; Jeon, J.-H.; Choi, H.-K. Designing an Energy Storage System Fuzzy PID Controller for Microgrid Islanded Operation. Energies 2011, 4, 1443–1460. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust Frequency Control in an Islanded Microgrid: H∞ and μ -Synthesis Approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar]
- Su, X.; Han, M.; Guerrero, J.M.; Sun, H. Microgrid Stability Controller Based on Adaptive Robust Total SMC. Energies 2015, 8, 1784–1801. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a Smart Grid with Wind Power Penetration by Coordinated V2G Control and Frequency Controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Han, Y.; Young, P.M.; Jain, A.; Zimmerle, D. Robust Control for Microgrid Frequency Deviation Reduction with Attached Storage System. IEEE Trans. Smart Grid 2015, 6, 557–565. [Google Scholar] [CrossRef]
- Hossain, M.J.; Pota, H.R.; Mahmud, M.A.; Aldeen, M. Robust Control for Power Sharing in Microgrids with Low-Inertia Wind and PV Generators. IEEE Trans. Sustain. Energy 2014, 6, 1067–1077. [Google Scholar] [CrossRef]
- Lewis, F.L.; Dawson, D.M.; Abdallah, C.T. Robot Manipulator Control: Theory and Practice; Marcel Dekker Inc.: New York, NY, USA, 2004. [Google Scholar]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB®; Springer: London, UK, 2009. [Google Scholar]
- Pahasa, J.; Ngamroo, I. Coordinated Control of Wind Turbine Blade Pitch Angle and PHEVs Using MPCs for Load Frequency Control of Microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. PHEVs Bidirectional Charging/Discharging and SoC Control for Microgrid Frequency Stabilization Using Multiple MPC. IEEE Trans. Sustain. Energy 2015, 6, 526–533. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load Frequency Control in Isolated Micro-Grids with Electrical Vehicles Based on Multivariable Generalized Predictive Theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Wen, G.; Hu, G.; Hu, J.; Shi, X.; Chen, G. Frequency Regulation of Source-Grid-Load Systems: A Compound Control Strategy. IEEE Trans. Ind. Inform. 2016, 12, 69–78. [Google Scholar]
- Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Application of Model Predictive Control to BESS for Microgrid Control. Energies 2015, 8, 8798–8813. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: Gewerbestrasse, Switzerland, 2014. [Google Scholar]
- Liu, X.; Zhang, Y.; Lee, K.Y. Coordinated Distributed MPC for Load Frequency Control of Power System with Wind Farms. IEEE Trans. Ind. Electron. 2016. [Google Scholar] [CrossRef]
- Senjyu, T.; Sakamoto, R.; Urasaki, N.; Funabashi, T.; Fujita, H.; Sekine, H. Output Power Leveling of Wind Turbine Generators Using Pitch Angle Control for All Operating Regions in Wind Farm. IEEE Trans. Energy Convers. 2006, 21, 467–475. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 2H (s) | 0.1667 | R (Hz/pu) | 3 |
| D (pu/Hz) | 0.015 | TW (s) | 1.5 |
| Tg (s) | 0.08 | TE (s) | 0.1 |
| Tt (s) | 0.4 | - | - |
| Windmill | Generator | ||||
|---|---|---|---|---|---|
| 14 m | Rated power WTG | 160 kW | R2 | 0.00443 Ω | |
| J | 62,993 kg·m2 | V | 380 V | X1 | 0.0376 Ω |
| ρ | 1.225 kg/m3 | R1 | 0.00397 Ω | X2 | 0.0534 Ω |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-T.; Yoo, H.-J.; Kim, H.-M. Analyzing the Impacts of System Parameters on MPC-Based Frequency Control for a Stand-Alone Microgrid. Energies 2017, 10, 417. https://doi.org/10.3390/en10040417
Nguyen T-T, Yoo H-J, Kim H-M. Analyzing the Impacts of System Parameters on MPC-Based Frequency Control for a Stand-Alone Microgrid. Energies. 2017; 10(4):417. https://doi.org/10.3390/en10040417
Chicago/Turabian StyleNguyen, Thai-Thanh, Hyeong-Jun Yoo, and Hak-Man Kim. 2017. "Analyzing the Impacts of System Parameters on MPC-Based Frequency Control for a Stand-Alone Microgrid" Energies 10, no. 4: 417. https://doi.org/10.3390/en10040417
APA StyleNguyen, T. -T., Yoo, H. -J., & Kim, H. -M. (2017). Analyzing the Impacts of System Parameters on MPC-Based Frequency Control for a Stand-Alone Microgrid. Energies, 10(4), 417. https://doi.org/10.3390/en10040417