1. Introduction
In microgrids (MGs), due to their scalability, competitive investment costs and flexible operation, fossil-fuel generation technologies have been the most common choice for supply of electricity in these remote networks. However, green energy such as wind, hydrogen and solar with economic and technical possibility, has become a preference in MGs [
1]. MGs are remarkable and necessary parts of distribution system development [
2]. MGs can be explained as distributed generation (DG) units, flexible loads and storages that operate in a balanced way to reliably generate power, connected to the main grid at the distribution level at a single coupling point, the so-called Point of Common Coupling (PCC) [
1]. The MG can operate in autonomous (islanded), or connected mode.
Siting and operation of DGs are special topics in distribution network optimization papers that must consider the miscellaneous factors that affect the action of MGs. A detailed definition of optimal placement and production of DG units in a MG is still a topic of discussion [
3,
4,
5,
6,
7,
8], and studies are still ongoing as to what is the optimal operation of DGs.
To find the optimal operation of the islanded MG with and without droop control the use of a central controller (CC) is vital. An MG CC is a solution for which some researchers have put forward models for the improvement of the operation of autonomous MGs. By focusing on economic profits, optimum scheduling techniques for autonomous MGs are discussed in [
9]. Zoka and Vasiljevska and their colleagues, had utilized the microgrid central controller (MG CC) to optimize the total fuel cost of islanded MGs where DGs are modeled based on droop control and a combined heat and power (CHP) unit [
10,
11].
The research of [
12] looked at power dispatching among DGs using an evolutionary algorithm. To reduce the fuel cost of islanded MGs, different techniques are proposed [
12,
13]. The authors in [
14], used the Harmony Search-Genetic Algorithm (HS-GA) for optimal operation of autonomous MG, but this paper considered only operation, not optimal location. In [
15,
16], an analytical programming method is given for sharing reactive power among DGs using droop control and considering the uncertainty of small wind plants. To find the optimal combination of DGs among micro-turbines, photovoltaics, and storages to supply thermal and power demands for a small MG, a dynamic programming method is employed. In [
17] a combination of DGs is explained by utilizing a linear programming scheme. To optimize the system operation where some agents can generate scheduling models from MG information, a multi-agent system for MG management is proposed in [
18]. Operation optimization of DGs is expressed in [
19] considering environmental factors. Using a hybrid evolutionary approach in a connected mode MG, optimal placement and operation of DGs in MGs are given [
20,
21].
Load flow analysis of a power system involves computing the voltage of all the buses and the active and reactive power flow through lines of a given load profile. A number of studies have proposed different power flow analysis models to address the characteristics of distribution systems and microgrids, including high R/X ratios (ratio of resistance of the line and reactance of the line), radial or weakly meshed topologies and a large number of branches and nodes. Some of the studies are based on the Newton-Raphson method [
22,
23], while others are based on the Gauss-Siedel method [
24,
25]. In [
26] a method for solving the power flow problem using basic electric circuit laws was introduced.
In [
27,
28] modified methods to solve the power mismatch equations based on evolutionary algorithms were presented. In [
29], authors presented an improved evolutionary algorithm for load flow analysis in island MGs and test system is a 6-bus microgrid system, although this system is very small. Load flow analysis in an islanded MG with renewable energy sources has been studied using the Guaranteed convergence Particle Swarm Optimization with Gaussian Mutation (GPSO-GM) method in [
30].
In [
31] a new model of low voltage (LV) distribution systems with distributed energy resources (DER) has been proposed, which is suitable for aggregating an existing distribution system into a cluster of virtual microgrids. The model is based on a linearized formulation of the branch flow equations and of the medium voltage/low voltage (MV/LV) supplying system.
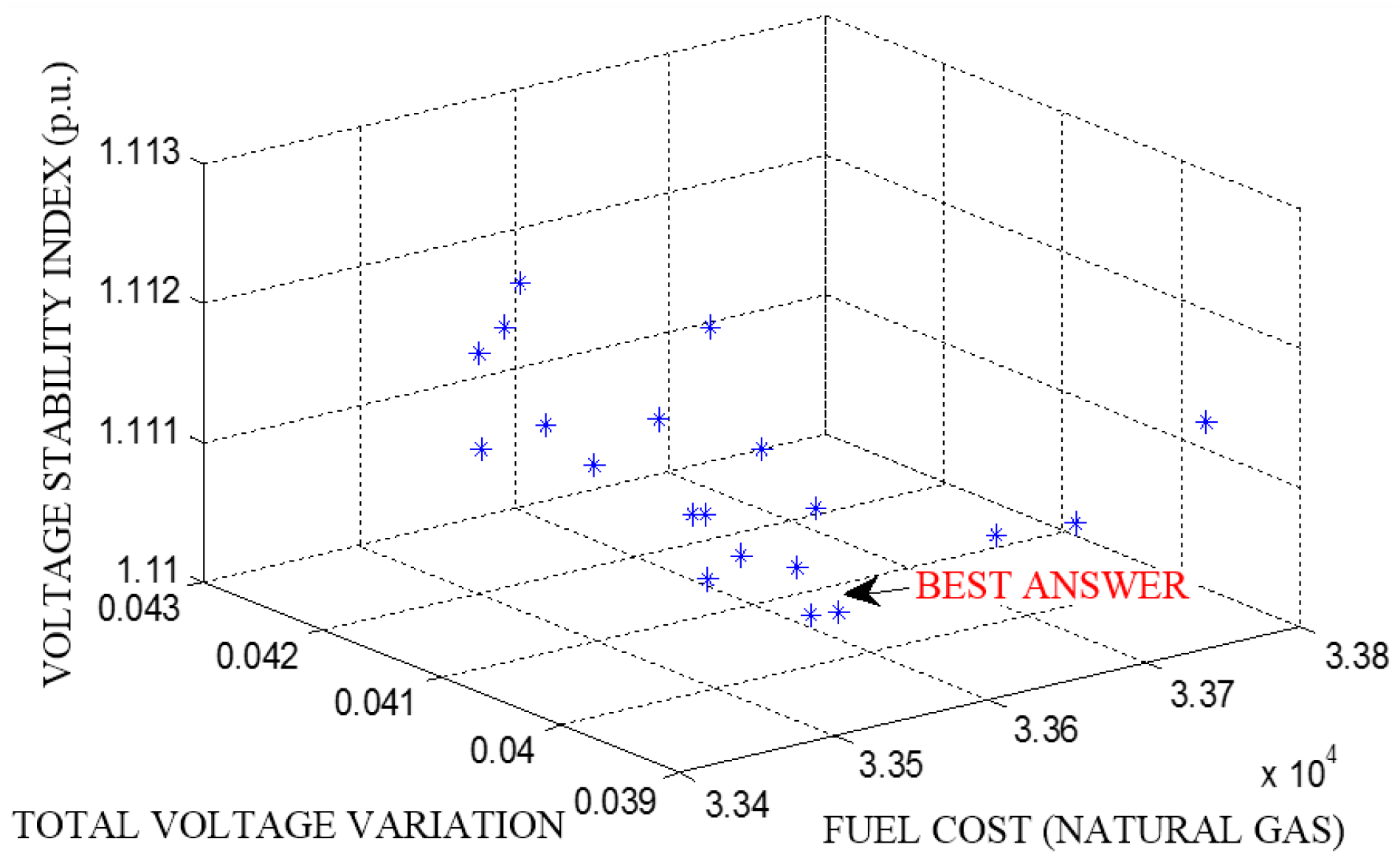
The mentioned studies represent a major portion in the field of electricity network optimization, but a review of works indicates that studies that have paid attention to the optimal operation of DGs along with their optimal location are scarce. This paper tries to compensate for this shortfall. It presents a new hybrid optimization algorithm to simultaneously find and choose the optimal operation mode and DG placement of an islanded MG. By looking for the optimal droop gain parameters of DGs and finding those, the operation is optimized. Three main factors are formulated through a multi-objective optimization problem. These factors include minimizing the fuel consumption cost, improving the stability and voltage variations subject to considering of operation and security constraints. To solve the multi-objective optimization problem in this work, a new hybrid algorithm, Imperialist Competitive Algorithm-Genetic Algorithm (ICA-GA), is developed. To run the suggested algorithm a novel formulation of load flow is utilized based on droop control, where the optimization variables include the steady state frequency of the system, reference voltage, reference frequency and droop parameters of DGs. In the suggested technique, the Pareto front of non-dominated results is provided, next the best answer of non-dominated outcomes are obtained by using a fuzzy approach.
The rest of this paper is structured as follows: firstly, the paper gives the problem formulation. This is followed by developing the proposed algorithm followed by providing a heuristic method to solve the optimization problem. Finally, simulation results and discussion are given.
2. Problem Formulation
The problem in this article is how to find the optimal place and static characteristics of DG units to: (1) reduce fuel consumption cost (
f1); (2) improve voltage stability (
f2); and (3) reduce variations of voltage (
f3), subject to some constraints. This minimization problem with above three objective functions can be formulated by the following expression:
where
k and
i indicate DGs place and static characteristics. Static characteristics containing droop parameters, frequency and voltage references:
A. Fuel consumption cost: This index can be expressed by:
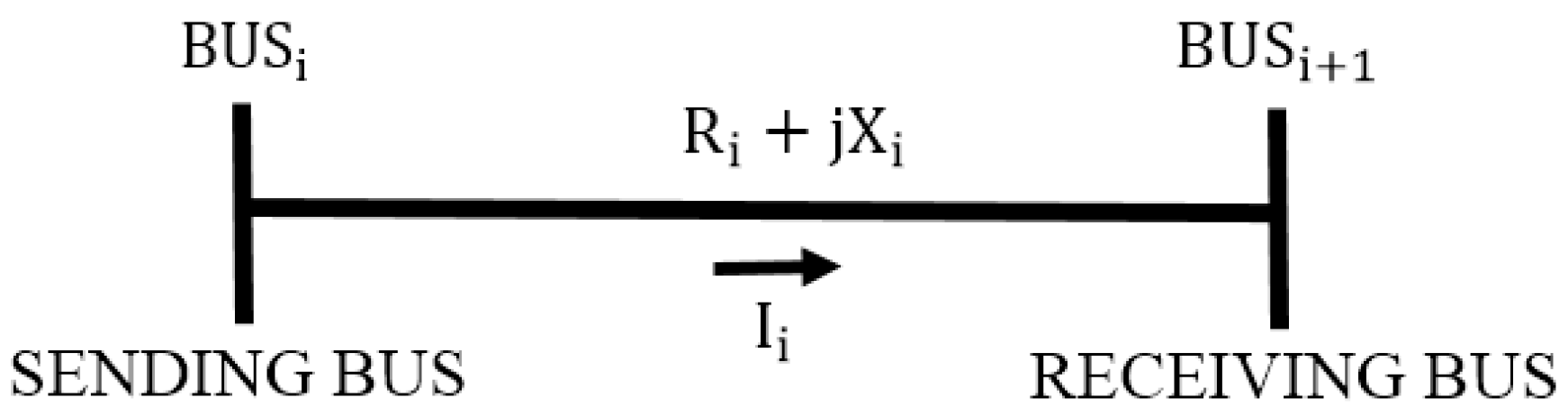
B. Voltage Stability Index (VSI): If DG units are connected to a radial distribution system, the voltage stability index is modified. The bus, whose voltage stability index value is poor, is further sensitive to voltage collapse. The equations utilized to formulate this index are proposed in [
32] to solve the load flow for distribution networks. The voltage stability index is defined as in Equation (4). By using this voltage stability index, one could measure the level of stability of MGs and thus appropriate action may be taken if the index indicates a poor level of stability. After the voltages at each bus are considered for load flow study, the VSI for all the receiving end buses of radial distribution systems can be calculated with this equation:
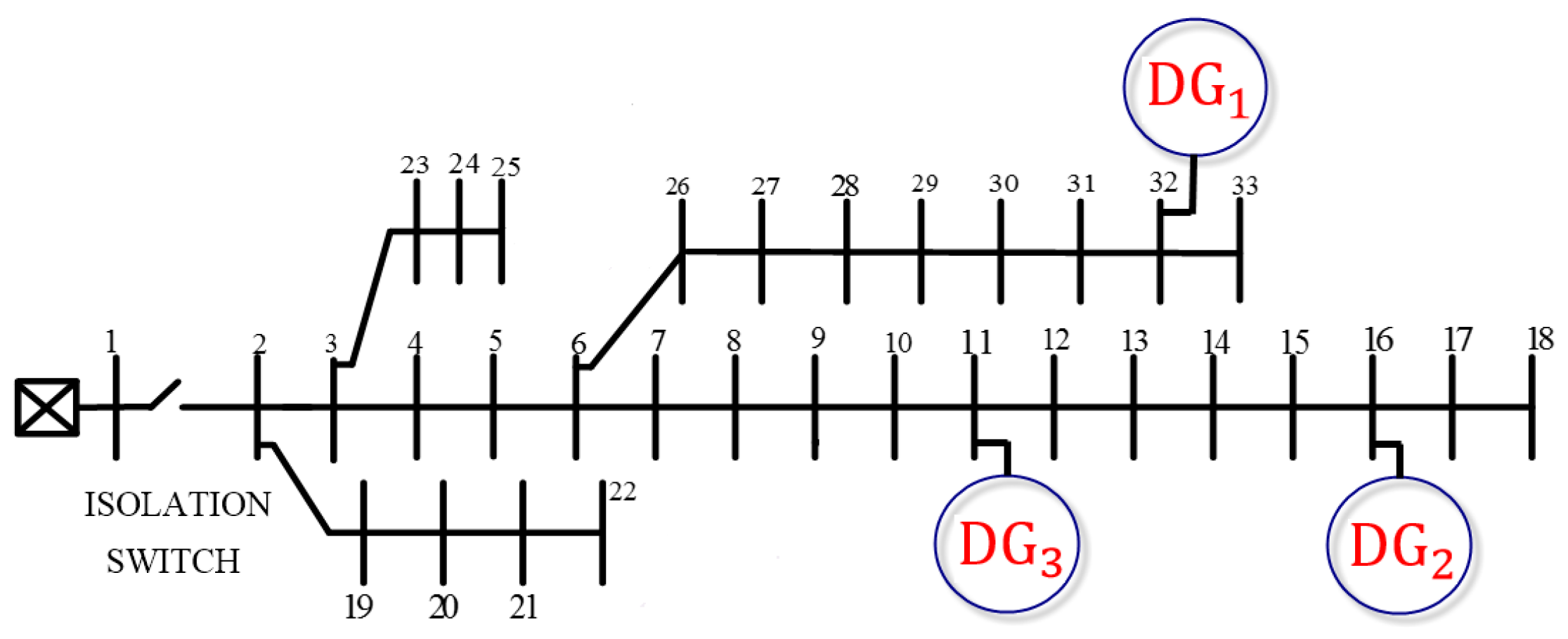
Figure 1 shows a MG line that is employed to calculate the stability of the voltage.
The bus, at which the range of the stability index is minimum, is more sensitive to the voltage collapse. The objective function stability index is given by Equation (5):
VSI should be maximized for developing voltage stability as its consequence the presented objective function will be minimized.
C. Variations of Voltage (VV): To uniform voltage in MG, VV index can be given by:
D. Constraints: There are two types of limits in the optimization problem: equality and inequality limits. Load flow equations are equality limits which can be expressed by [
14]:
Inequality limits include voltage, thermal and power generation limits:
- (1)
Voltage: One of the inequality limits is the magnitude of voltage in buses as shown in [
14]:
- (2)
Thermal: The thermal limit is occurred because of the current flow in MG lines:
- (3)
Power Generation Limit of DGs: For the MG that operates in islanded mode with a droop controller, the power generation limit can be obtained based on active, reactive and nominal power [
21]:
3. Proposed Solution
Here, to solve the above multi-objective problem, a new scheme is proposed. The solution is developed in three parts: (a) proposing a hybrid optimization algorithm, named ICA-GA, to solve the multi-objective problem; (b) creating a novel load flow formulation to run suggested algorithm, ICA-GA, that the optimization variables based on droop control, are the steady state frequency of system, reference voltage, reference frequency and droop parameters of DGs; and (c) adopting a fuzzy approach to procure the best answer of non-dominated outcomes.
3.1. Three Fuzzy-Subordination Functions
In this paper for solving the multi-objective problem, three objective functions,
and
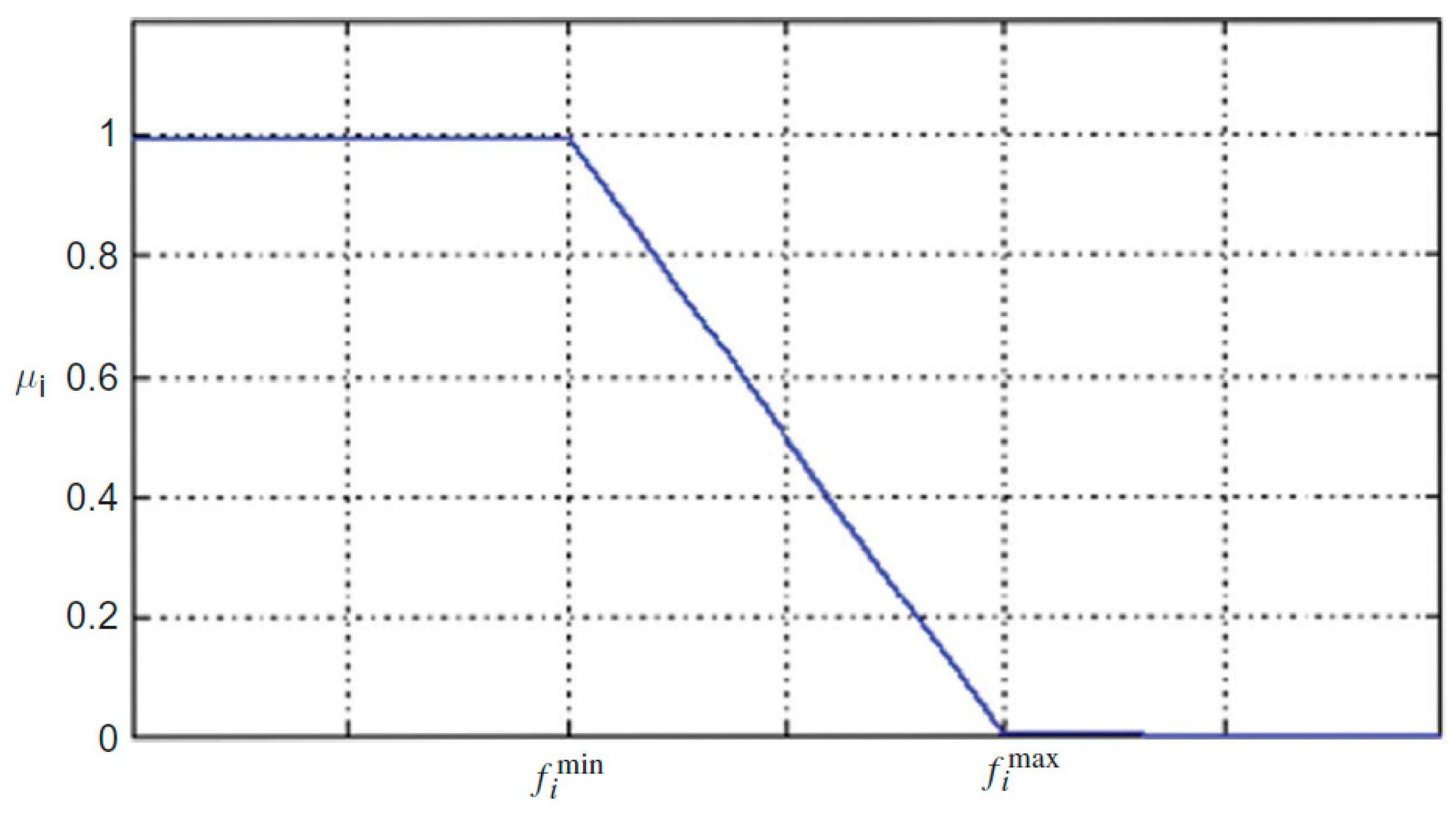
are considered as explained in Equations (3), (5) and (6), respectively. Therefore, to find the multi-objective problem solution, fuzzy functions are used. The objective functions that described in the previous section should be modified by utilizing the following membership functions:
where
i = 1, 2, 3;
,
and
are indices for the fuzzy subordination of three optimized objectives. The bounds
and
, are the best values that calculated from three objective functions. These fuzzy functions are linear-partition of fall half trapezoid that can be seen in
Figure 2. Evolutionary algorithms create a random swarm and explore in a problem space to find the optimal answer. In the proposed method to solve multi-objective functions, there is a set of non-dominated answers that can be kept in each iteration in a repository. The answer
dominates
if Equations (15) and (16) are warranted:
The following equation, named normalized function, can be employed to evaluate each individual that there is in the repository:
Equation (17) can be used for all objective functions to sort the non-dominated responses according to the determiner priority.
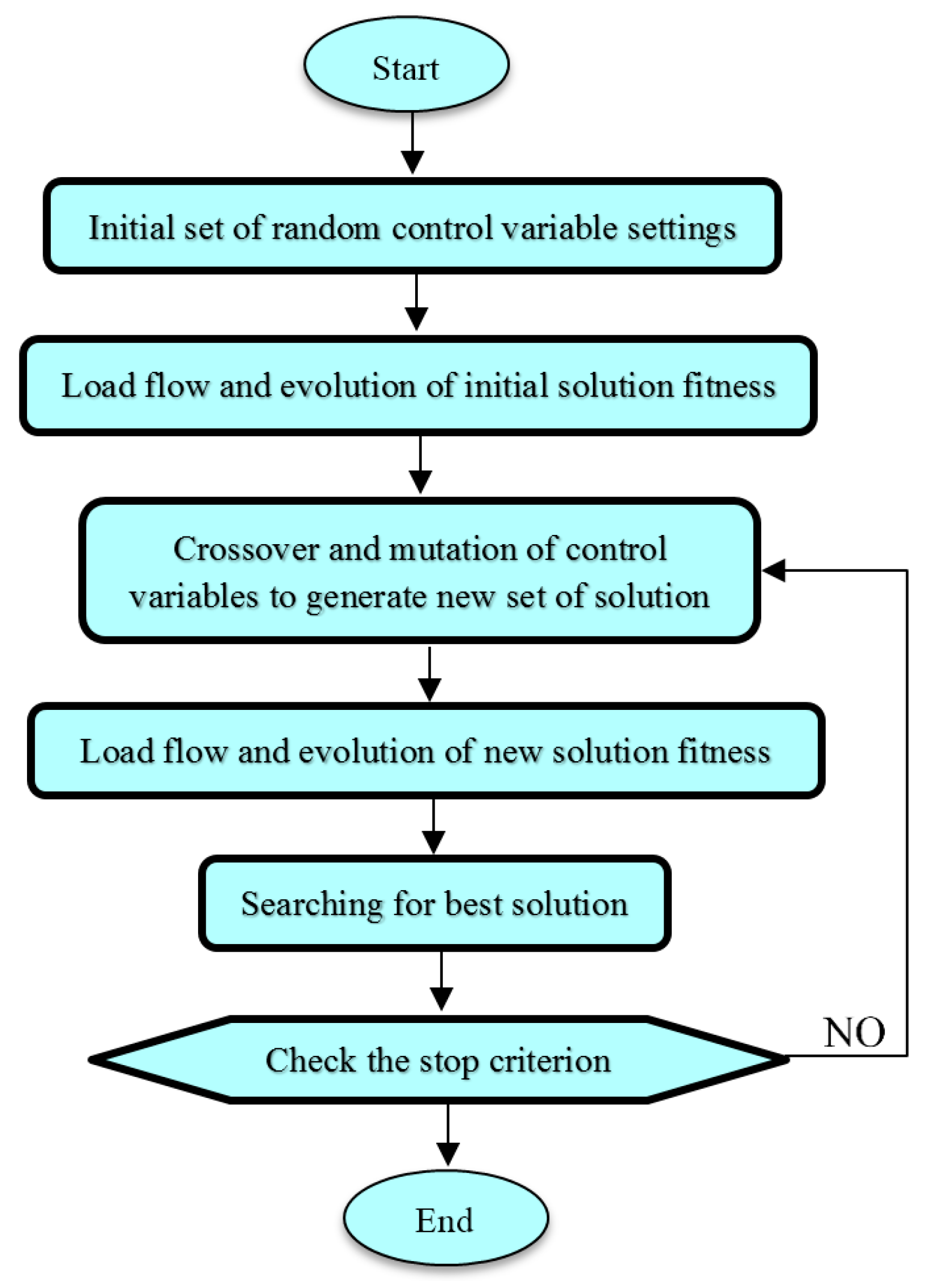
3.2. Genetic Algorithm (GA)
The GA that is applied in our suggested scheme is briefly explained in this section. The population in the GA has n chromosomes that indicate the candidate solutions; the number of optimized variables is m, so that any chromosome is an m dimensional real value vector. Thus, any optimized variable illustrates a dimension of the problem space.
Figure 3 shows the flowchart of a GA algorithm for finding optimal site, production and droop parameters of DGs and this algorithm can be explained in the following stages:
- Stage 1:
First puts the time tally t = 0 and then generates n chromosomes accidentally, [, j = 1,…, n], where = [, ,…, ]. , will generate in searching space [; ] accidentally (initialization).
- Stage 2:
Creating Jbest (best value of the objective function) after evaluating each member in the initial population (fitness).
- Stage 3:
Set t = t + 1 (time updating).
- Stage 4:
By iterating the following stages makes a new population until the new population is perfected: (new population):
Selection: choosing parents with considering their fitness.
Crossover: to create a new child can cross over the parents with a crossover possibility.
Mutation: to create a new child can use the method mutates with a mutation possibility.
Acceptance: locate new chromosome in a new population.
- Stage 5:
For a renewed run of the GA, the new created population should be employed (replacement).
- Stage 6:
The process will stop if one of the stopping criteria was recognized, otherwise return to stage 2.
3.3. Imperialist Competitive Algorithm (ICA)
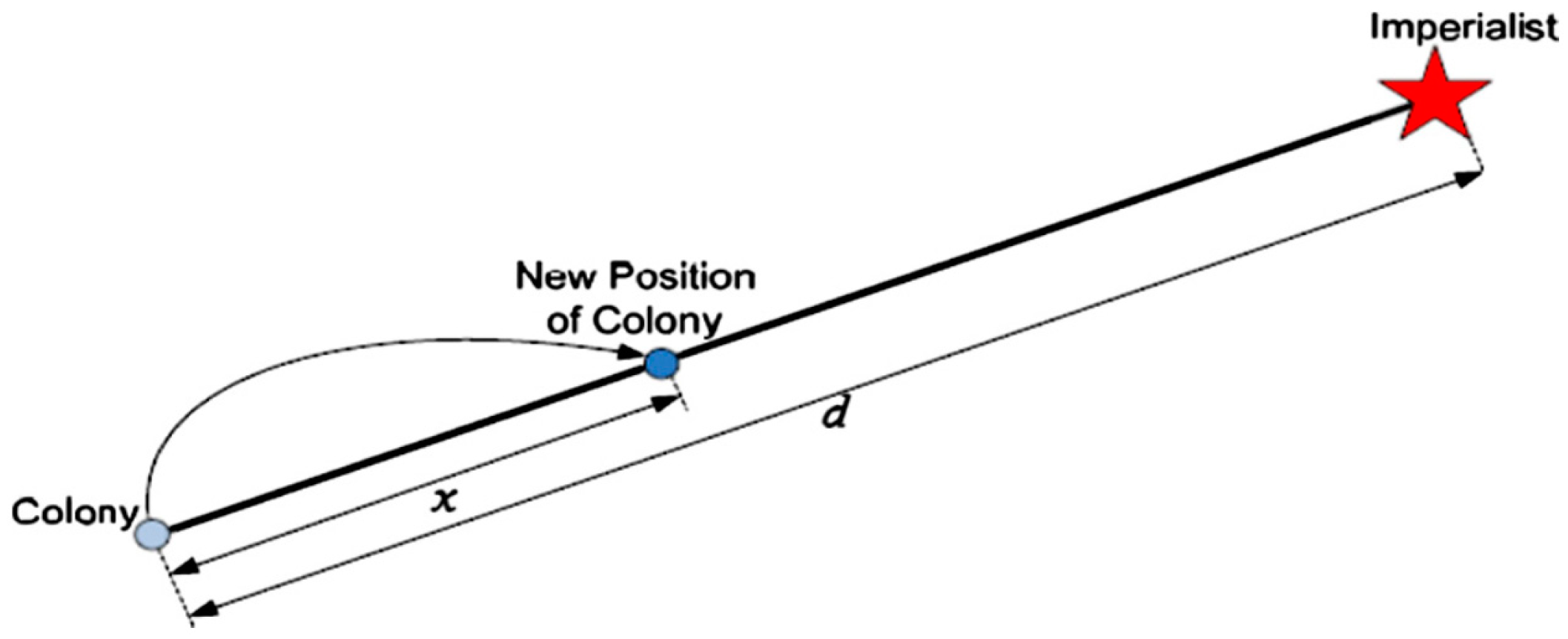
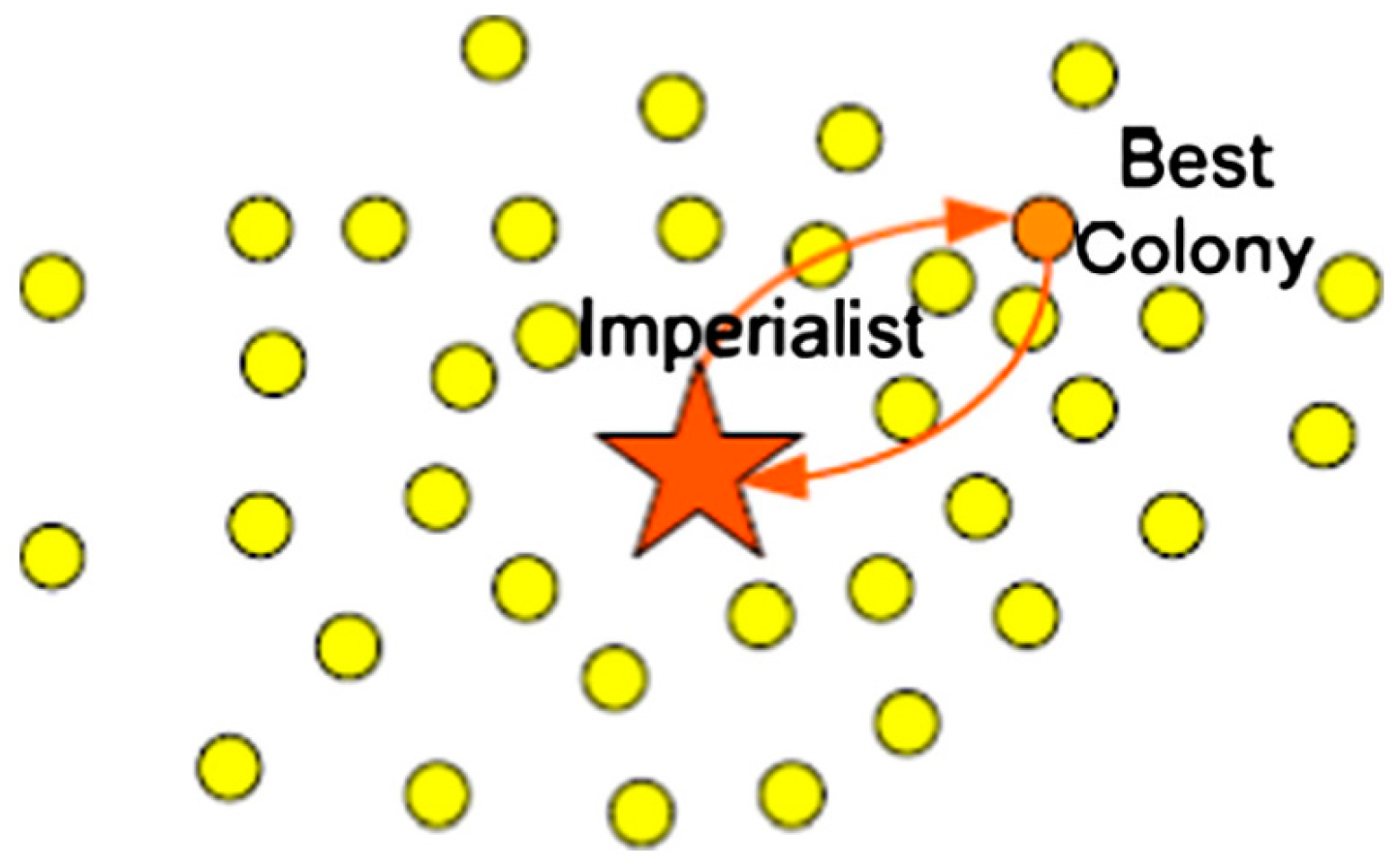
ICA is a novel algorithm based on human political and socialist evolution. The initial population contains N countries among which the countries with the minimum cost are selected as the imperialists and with considering the empire power other countries belong to empires. Applying the attraction policy, the imperialists attract the colonies towards themselves.
Figure 4 shows the attraction policy that forms the essential concept of ICA. The imperialists attract these colonies towards themselves respect to their power that described in Equation (18). The total power of each empire is determined by the power of its both parts, the imperialist power plus percent of its average colonies power:
where
is the total cost of the
n-th empire and
n is a positive number (here 0.05).
With the attraction policy, the colony moves towards the imperialist by
x unit.
Figure 4 shows that the direction of movement is the vector from colony to imperialist, where
d is the distance between the colony and imperialist and
x is a random variable with uniform distribution.
Figure 5 shows the displacement of colony and imperialist [
33,
34].
The powerless empires will lose their power and their colonies during the imperialistic competition. Finally, all the empires except the strongest one will collapse and all the colonies will be controlled by this unique empire.
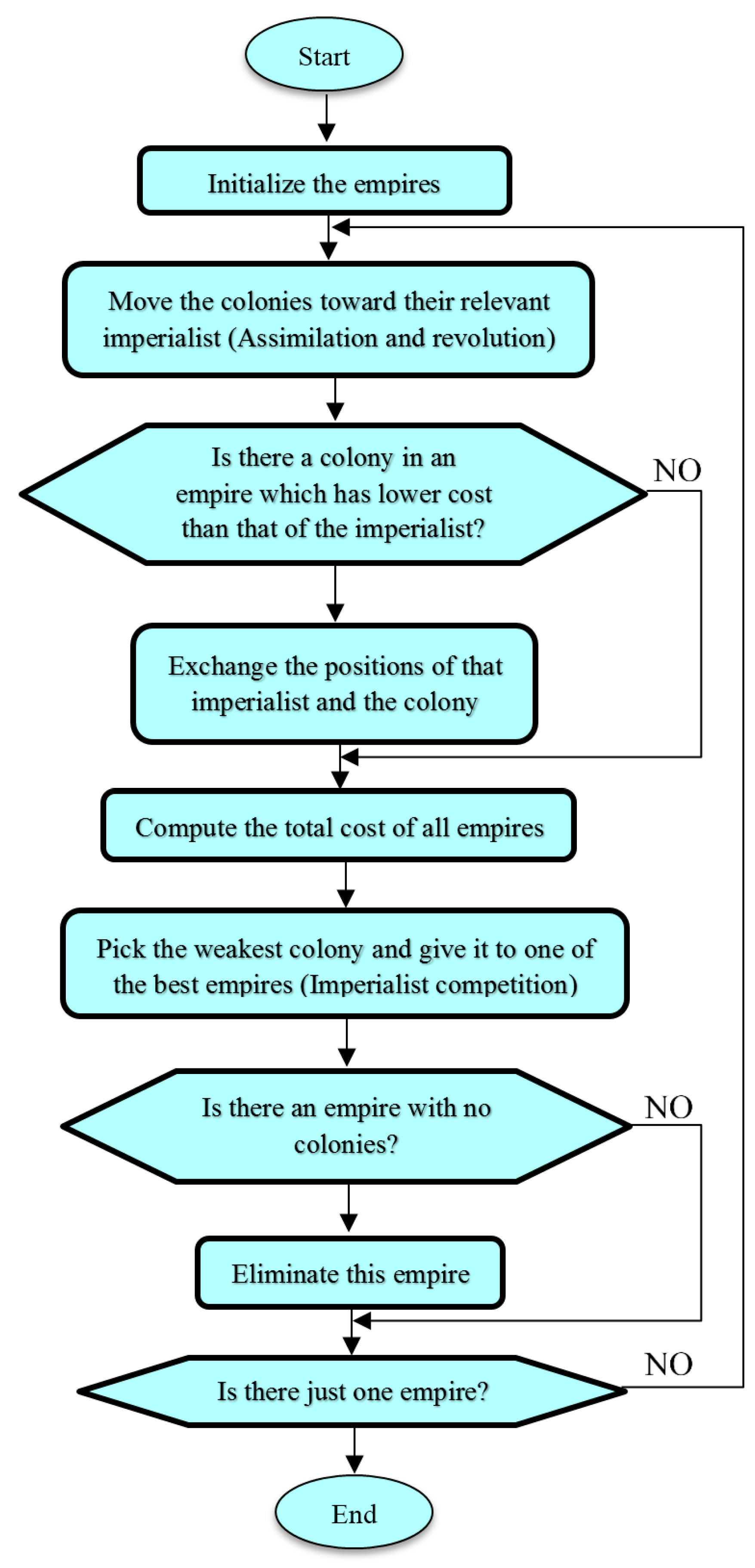
Figure 6 shows the ICA flowchart.
Also, this algorithm can be explained in the following stages:
- Stage 1:
Generation of an initial population for every empire.
- Stage 2:
Assimilation (select the colonies moving toward their respective imperialist) and Revolution (select the colonies moving toward others that have lower cost).
- Stage 3:
Comparison between imperialist and the best colony, if the best colony costs are better, their positions are displaced.
- Stage 4:
Calculate the objective function for every empire.
- Stage 5:
Choice of the weakest colony and its placement in the best empire.
- Stage 6:
Collapse of the weak empires.
- Stage 7:
When only one empire remains, algorithm will stop. Otherwise, return to Stage 2. The last imperialist that remains is the answer.
3.4. Proposed ICA-GA Algorithm
The proposed ICA-GA algorithm is employed for finding the optimal droop parameters, place and production of DGs at the same time. In this scheme, the ICA algorithm is run and employed for finding the optimal droop parameters, place and production of DGs by computing the cost of colonies and imperialist in each empire firstly. Secondly, the GA algorithm is used for generating a new set of colonies in the all search spaces by using operators such as mutation and crossover to obtain a better cost than the imperialist. The proposed ICA-GA algorithm has the benefits of both the ICA and GA methods and better outcomes compared with other common methods in power systems optimization problems.
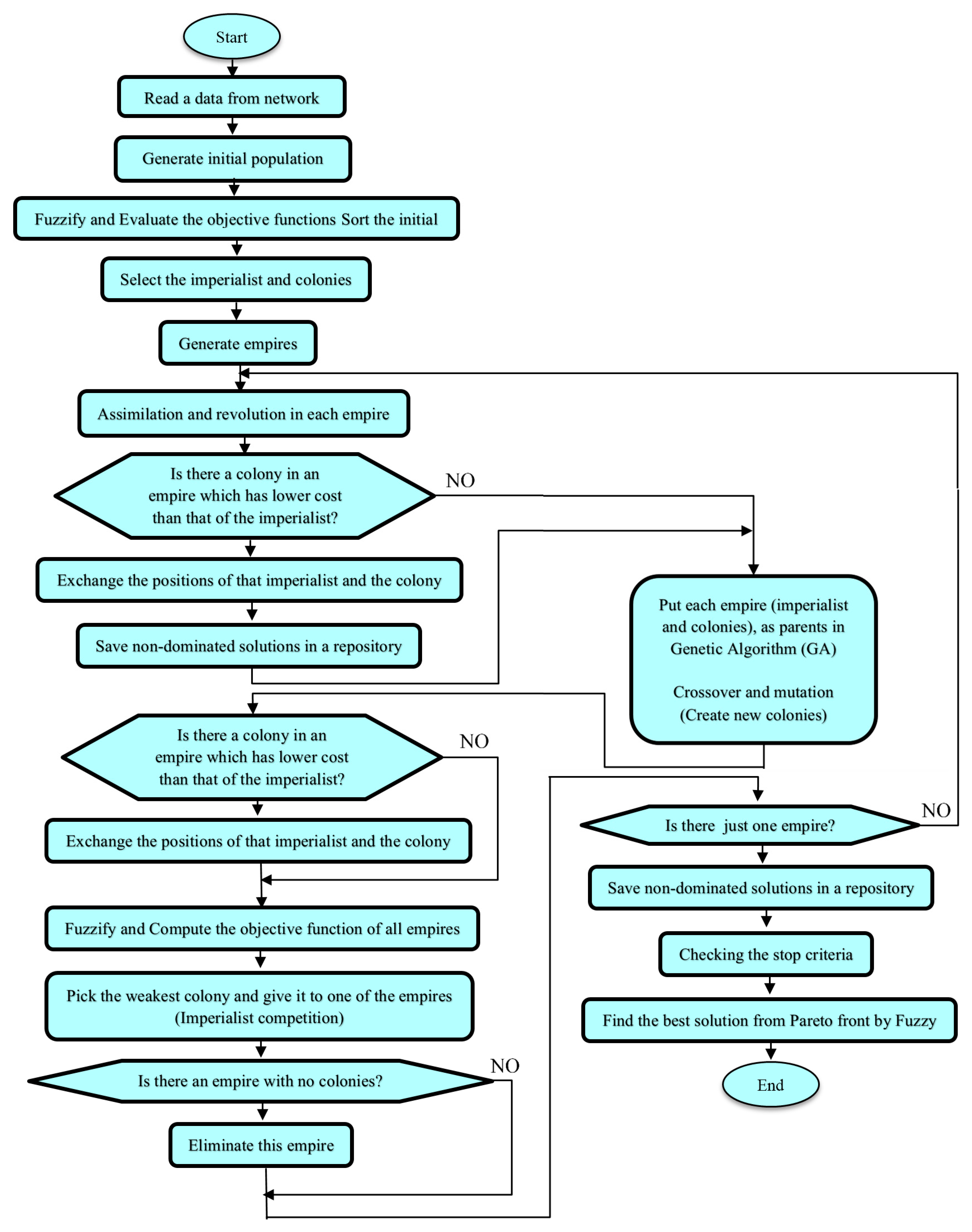
Figure 7 shows the ICA-GA flowchart for finding the optimal droop parameters, place and production of DGs at the same time. Also, this algorithm can be explained in the following stages:
- Stage 1:
Start.
- Stage 2:
Read the information regarding grids (such as loads, lines reactance and resistance).
- Stage 3:
Generate an initial population (such as place and production of DGs and droop parameters).
- Stage 4:
Fuzzify and evaluate the objective functions.
- Stage 5:
According to the objective function, arrange the initial population.
- Stage 6:
Chooe the colonies and imperialists.
- Stage 7:
Create empires.
- Stage 8:
Assimilation (select the colonies moving toward their respective imperialist) and Revolution (select the colonies moving toward others that have lower cost).
- Stage 9:
Compare between imperialist and the best colony; if the best colony costs are better, displace their positions.
- Stage 10:
Save non-dominated solutions in a repository.
- Stage 11:
Consider each empire as parents in a GA and generate a new population.
- Stage 12:
Using the mutation and crossover operators for generating new colonies.
- Stage 13:
Compared the imperialist and the best colony generated from the GA; if the best colony costs are better, change their positions.
- Stage 14:
Fuzzify and compue the objective function of all empires.
- Stage 15:
Imperialist competition (means choosing the weakest colony and put it in the best of the empires).
- Stage 16:
Collapse the weak empires.
- Stage 17:
When only one empire remains, the algorithm will stop, otherwise, return to Stage 8. The last imperialist that remains is the answer.
- Stage 18:
Save the non-dominated solutions in a repository.
- Stage 19:
Check the stop criteria.
- Stage 20:
Find the best solution from the Pareto front by the fuzzy normalization Equation (19):
- Stage 21:
End.
3.5. Proposed Load Flow Algorithm
Traditionally, many algorithms have been used to solve the load flow problem such as Fast-Decoupled and Newton-Raphson. However, these methods may not be useful in distribution networks and MGs because of the divergence of results due to the low value of X/R of MGs. To cope with this divergence problem, a number of algorithms have been proposed [
4,
6]. Unfortunately, when using such algorithms, we will face two issues, namely the slack bus consideration issue and lack of droop bus consideration issue. Typically, power flow analyses assume one DG as a slack bus to hold the network frequency but this might not be applicable to islanded MGs due to a number of reasons such as low capacities of DGs in MGs, economical reasons and other technical issues. Therefore, we use the droop bus instead of the slack bus and the power flow must be reformulated.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}