1. Introduction
In recent years, the demand of electrical power increases due to the social, political, and technological perspective. The distributed generators (DGs) and renewable energy generation have become an inevitable trend because of the economic, environmental, and critical factors and limiting available primary energy resources. When they are connected into the existing power system far away from the load centers, leading on an increase in the scale and complexity of the electric power systems, most power systems operate with requirement very close to their limits and always constrained by small-signal and transient stability conditions. If the inertial response and power damping capability are an insufficient quality when disturbances in the power system occur, low frequency oscillations may appear. These oscillations are due to the outcome of dynamical coactions between the generators within a system. Thus, it can lead to the generators outage, lines tripping, and regions blackout of the system.
In the past five decades, the power systems around the world have faced more blackouts with various severities due to human and technical faults. Power-technology.com has listed out the world’s top 10 worst blackouts, such as Indian on 30 and 31 July 2012; Paraguay-Brazil on 10 November 2009; Chenzhou in China in January and February 2008; Germany, France, Italy and Spain on November 2006; Indonesia on 18 August 2005; Greece on 12 July 2004; Switzerland on 28 September 2003; Eight U.S. states and Canada on 14 August 2003; Quebec and parts of the U.S. on March 1989; New York City on 13 July 1977; and USA on 9 November 1965, all of which have happened in the last 50 years. Among them, the Indian grid disturbance is a notable event, leaving 620 and 370 million people without electric power for several hours on two days, 30 and 31 July 2012, respectively. The least event is the power system blackout in South Australia on 28 September 2016.
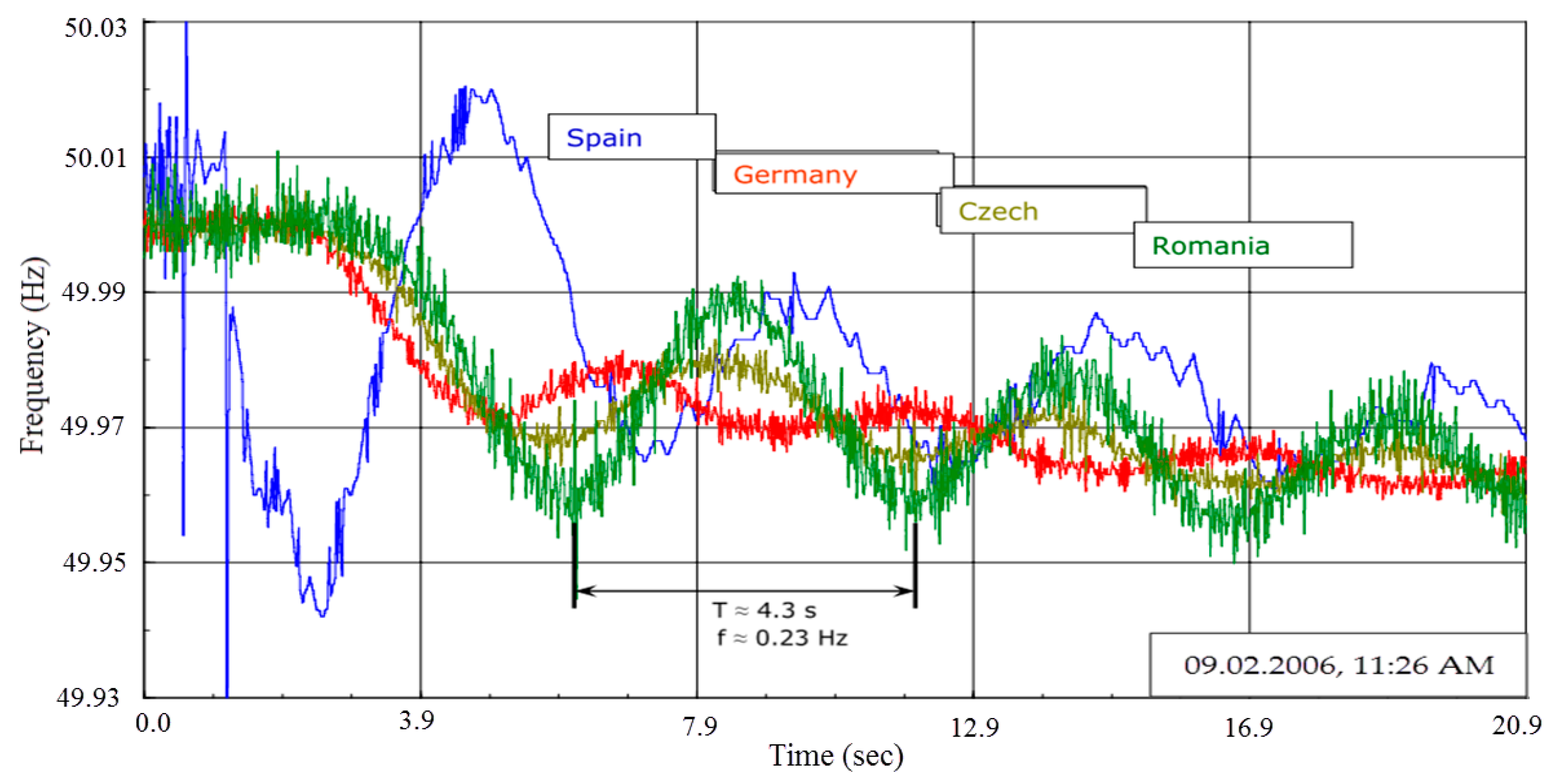
Figure 1 is an example of the instable inter-area event of recording a wide area measuring system (WAMS) on 9 February 2006 in Spain [
1]. Clearly, observing from this figure, it can be shown significant changes of the dynamic behavior of the system due to the loss of generated power 1.2 GW. The frequency decreases immediately in the proximity of one of power plant outage. The decrease of frequency spreads over the whole system and finally reaches the Romania system with a time delay of about 2.0 s. This event tells us that the inter-area oscillations have a frequency range 0.21–0.25 Hz.
The low frequency electromechanical oscillations happen in the power systems due to the contingencies. These oscillations have a frequency range 0.1–2.0 Hz, classified into two groups based on the energy of oscillation: (i) occurring between generators in a small group, called local mode, having a frequency range 0.7–2.0 Hz; and (ii) occurring between generators in large groups, called inter-area oscillations, having a frequency range 0.1–0.8 Hz [
2,
3]. Such oscillations menace the stability point of the power system, thus damping these oscillations is necessary for the sure system operation. From the viewpoint of the system instability due to the limited value increment for current network structure, accordingly, most of the efforts for damping oscillations focus on using the controllers to improve the oscillation damping ability, such as Flexible alternating current transmission system (FACTS) devices, power system stabilizers (PSSs), energy storage systems (ESSs), and so on. The installation of PSS in the system is the traditional method. For this method, the adverse effects are the local-area mode oscillations damping, the variation in the voltage profile under serious disturbances, the leading power factor [
4]. FACTS is widely used to enhance the operational flexible of the system under other operation conditions, and especially to damp out local- and inter-area mode oscillations [
5,
6]. This device has the ability to control the parameters of the power system or to modify the load flow, so that the power system may be improved stability and damped oscillations when the grid faults occurred. Thus, FACTS could be the best alternative to enhance the stability margin of the existing power systems and it provides against the inter-area oscillation damping better than PSSs [
7]. For ESS device, from the point of view of the power system control, the ESSs are better than the FACTS and PSSs, because they cannot only regulate the reactive power exchange but also the active power with the power system where it is installed. The purpose of applying ESS technology in power is the same FACTS and PSS. However, in order to enhance the power system oscillation damping, ESSs are more flexible than PSSs [
8] because of exchanging active power directly. For instance, Du et al. [
9] have explained why and how the battery energy storage system (BESS) based on stabilizer can dampen the inter-area oscillations in a multi-machine power system. Chen et al. [
10] introduced the complex torque coefficient method to analyze the use of the energy storage system ESS based on flywheel storage technology for damping the power system oscillations of the infinite-bus power system considering single-machine. For this paper, we only focus to dampen the power system oscillations using FACTS device. However, the benefits of FACTS depend greatly on their placement in network [
2,
7,
11]. Consequently, the optimal location of FACTS devices, and especially static synchronous compensator (STATCOM) in the multi-machine, is an interesting research topic.
In the last decades, many researchers have proposed techniques for locating the location of FACT based on two groups: (i) analytical methods; and (ii) heuristic optimization approaches [
12,
13,
14]. Methods based on heuristic algorithms include the genetic algorithm (GA) [
15], the particle swarm optimization (PSO) technique [
16], the cuckoo search algorithm [
17], modified artificial bee colony algorithm (MABCA) [
18], and simulate annealing (SA) [
19]. These methods were used to increase system load-ability and the system security margin. Evolutionary algorithm (EA) [
20] and bacterial swarming algorithm (BSA) [
21] are used to minimize the real power loss in the transmission lines and to improve voltage profile at load buses. The bees algorithm (BA) is applied by [
22] to maximize the available transfer capability of power agreement between sink areas and source. Contrasting to the heuristic methods, some authors proposed the analytical methods. For example, Sadikovic et al., Magaji et al. [
23,
24] have proposed the residue factor method to damp inter-area mode of oscillations. Kunnar et al. [
25] have utilized the modal controllability index to dampen inter-area oscillations. Van Dai et al., Le et al. [
2,
11], have introduced the energy method to dampen the power system oscillations in IEEE 39-bus power system, and Zamora-Cárdenas et al. [
26] proposed the multi-parameter trajectory sensitivity approach to determine the optimal placement of series FACTS devices with the objective of providing enough level of transient stability.
In addition, the optimal location of STATCOM highly depends on the supplemental controller, namely the power oscillation damping (POD) controller and its feedback signal position [
27]. Leading in recent years, many of the optimization methods have been proposed to find out ways for answering the question of which POD controller and its feedback signal could result in the STATCOM having the considerable effect on the system. For example, genetic algorithm (GA) is proposed by Eshtehardiha et al., Panda et al. [
28,
29], but this method requires a very long run time to the large-scale systems. Safari et al. [
30] introduced the Artificial Bee Colony (ABC) method, but the convergence is very slow. Abd-Elazim et al. [
31] introduced the imperialist competitive algorithm (ICA) for optimal design of STATCOM parameters. In addition, local input signals as the line reactive and active power, line current, and bus voltage are all good selections for the feedback signal of POD controller of FACTS to dampen the power system oscillations [
2,
11]. The active power in the transmission line is considered as an effective input signal for POD controller [
32]. Reference [
33] concluded that the current or active power is not difference when using them as the feedback signal. For this paper, the active power in the transmission line is chosen as a feedback signal. However, in the previous proposed researches, the authors did not mention the location of input signal placement.
It can be observed that most employed techniques in the previous literature have several drawbacks: (i) There is no mention of the optimal location of the local input signal for the POD of STATCOM; (ii) Slow convergence in search stage, limit of local search ability, and the requested process time is very long when studying the large-scale systems, so they just focus on analyzing the small-scale power systems; (iii) The calculation of critical modes may be doubtful in the case of the larger-scale and complex power systems because they may not be unique. Furthermore, the calculation of these critical modes also depends on the local- or inter-area mode; (iv) The calculation of participation coefficients is only based on the state variables and neglects the input–output behaviors. Therefore, in order to overcome these drawbacks, this paper proposes a feasible method. This method is a conjunction between the energy method based on the observability and controllability Gramian matrices and the Krylov-based model reduction method to determine the optimal location of STATCOM and the local input signal position of POD controller with aim of improving the stability of the large-scale power systems, respectively.
The main contribution of this paper is to propose a feasible method:
- (i)
To determine the optimal placement of STATCOM and the best local input signal position of its POD controller;
- (ii)
To limit the time calculation when analyzing the complexity and large-scale power systems on the small-signal stability analysis.
The remainder of this paper is organized as follows:
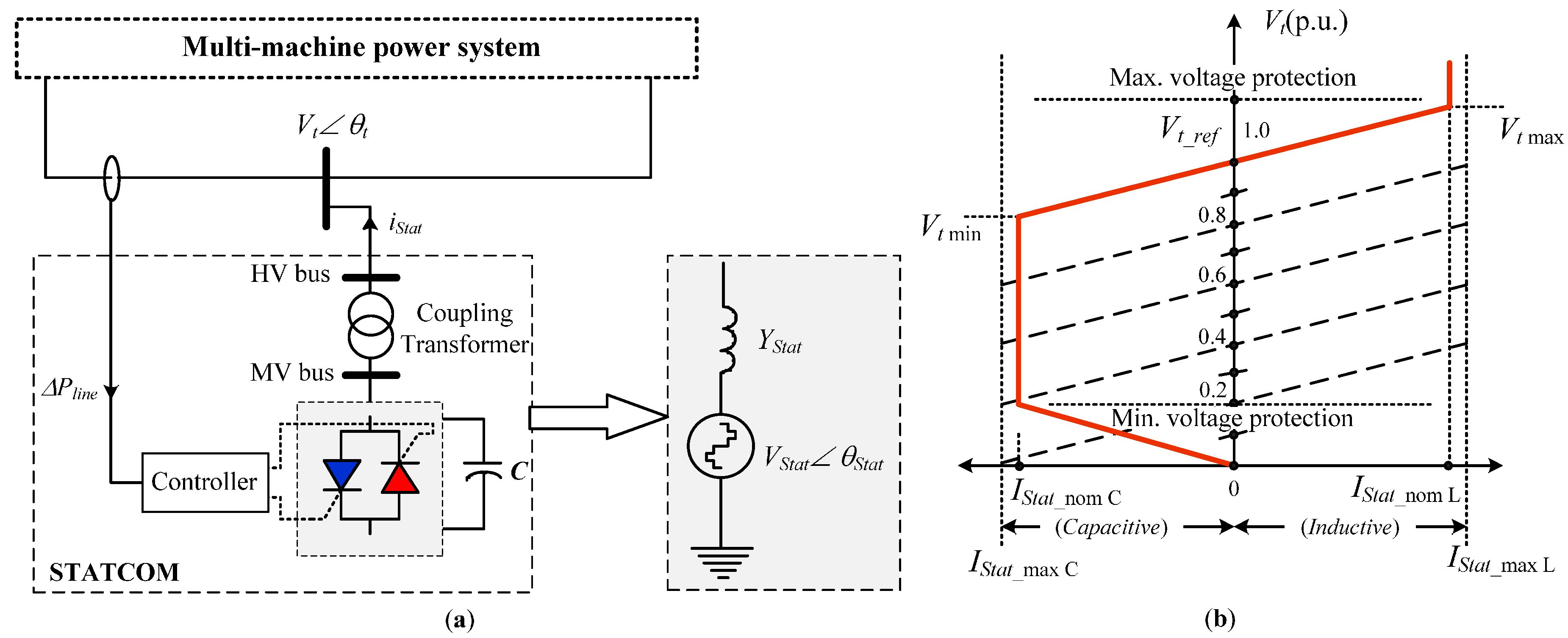
Section 2 analyzes the mathematical model of the STATCOM, power system, and incorporation the STATCOM in the power system.
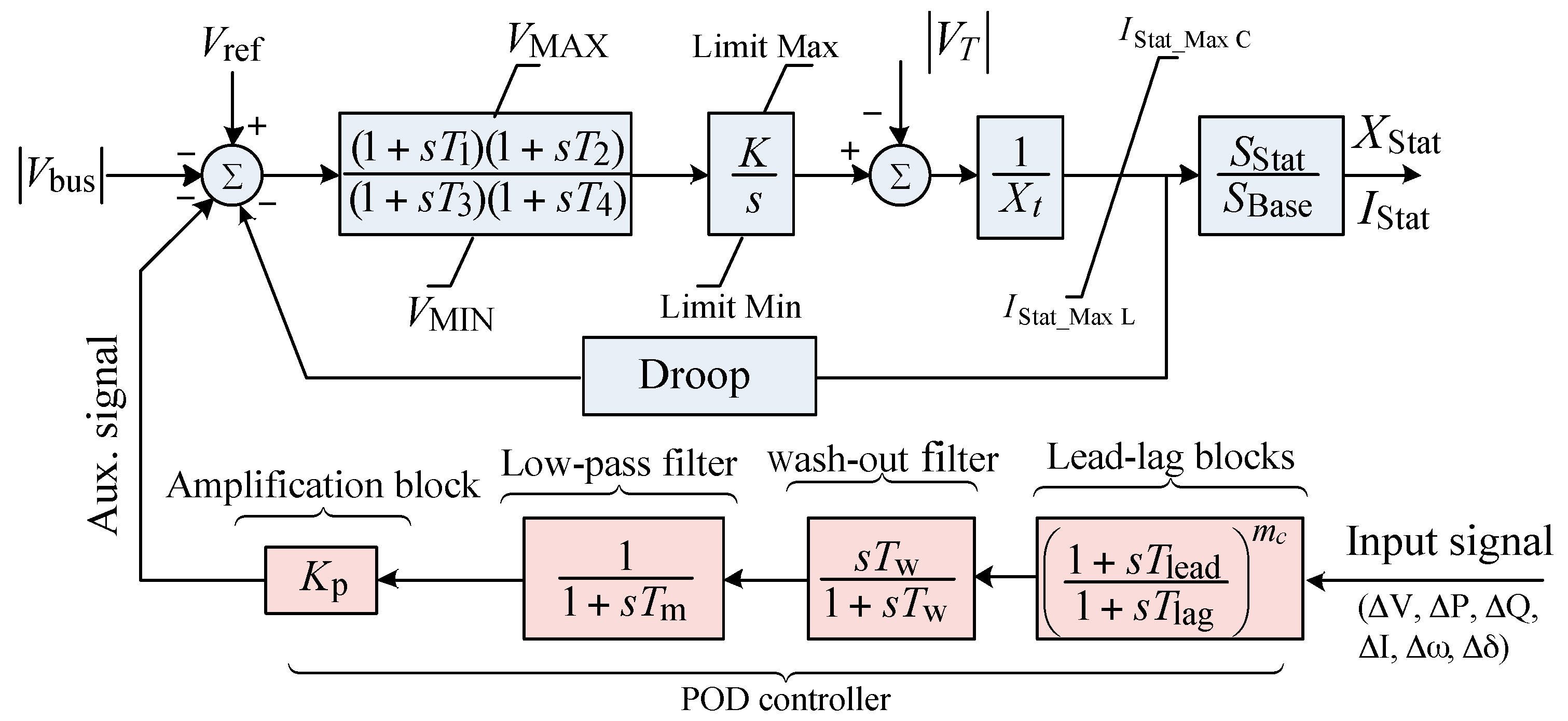
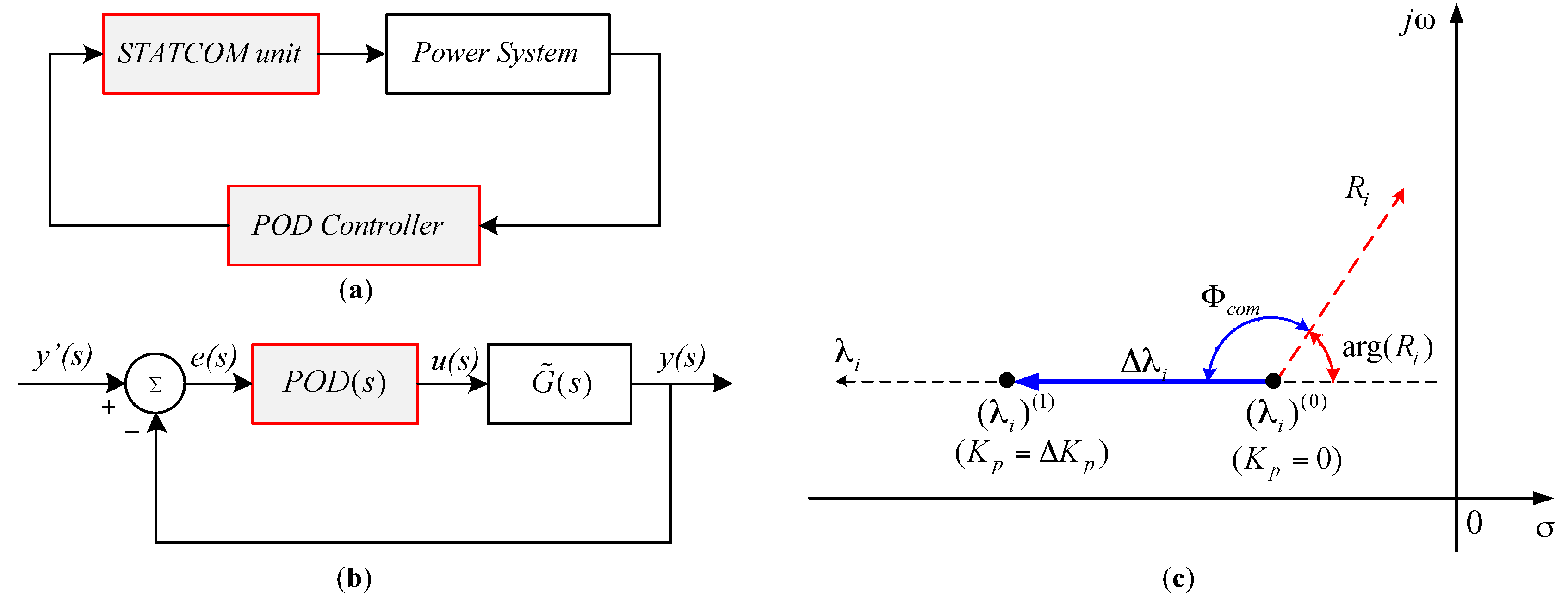
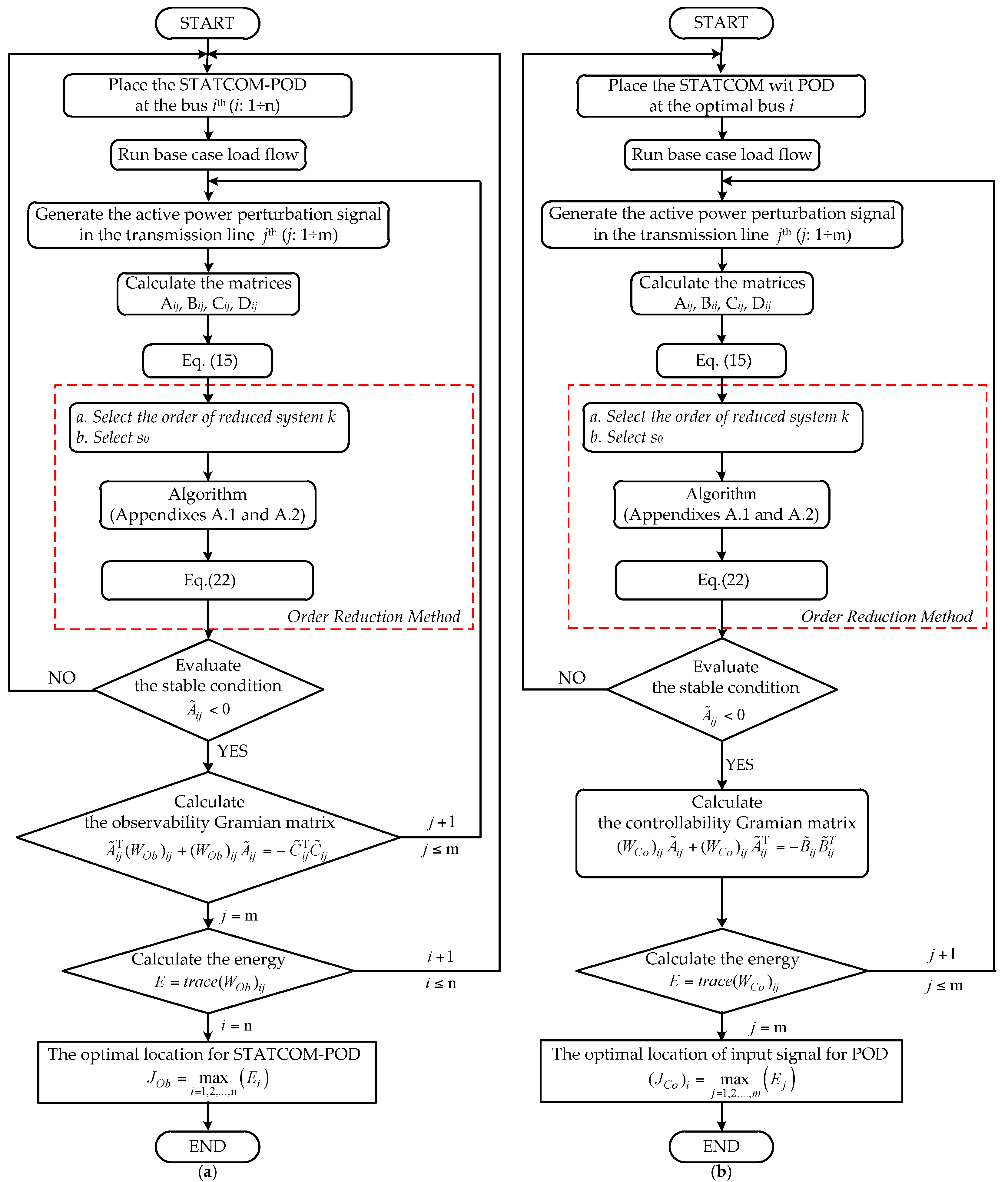
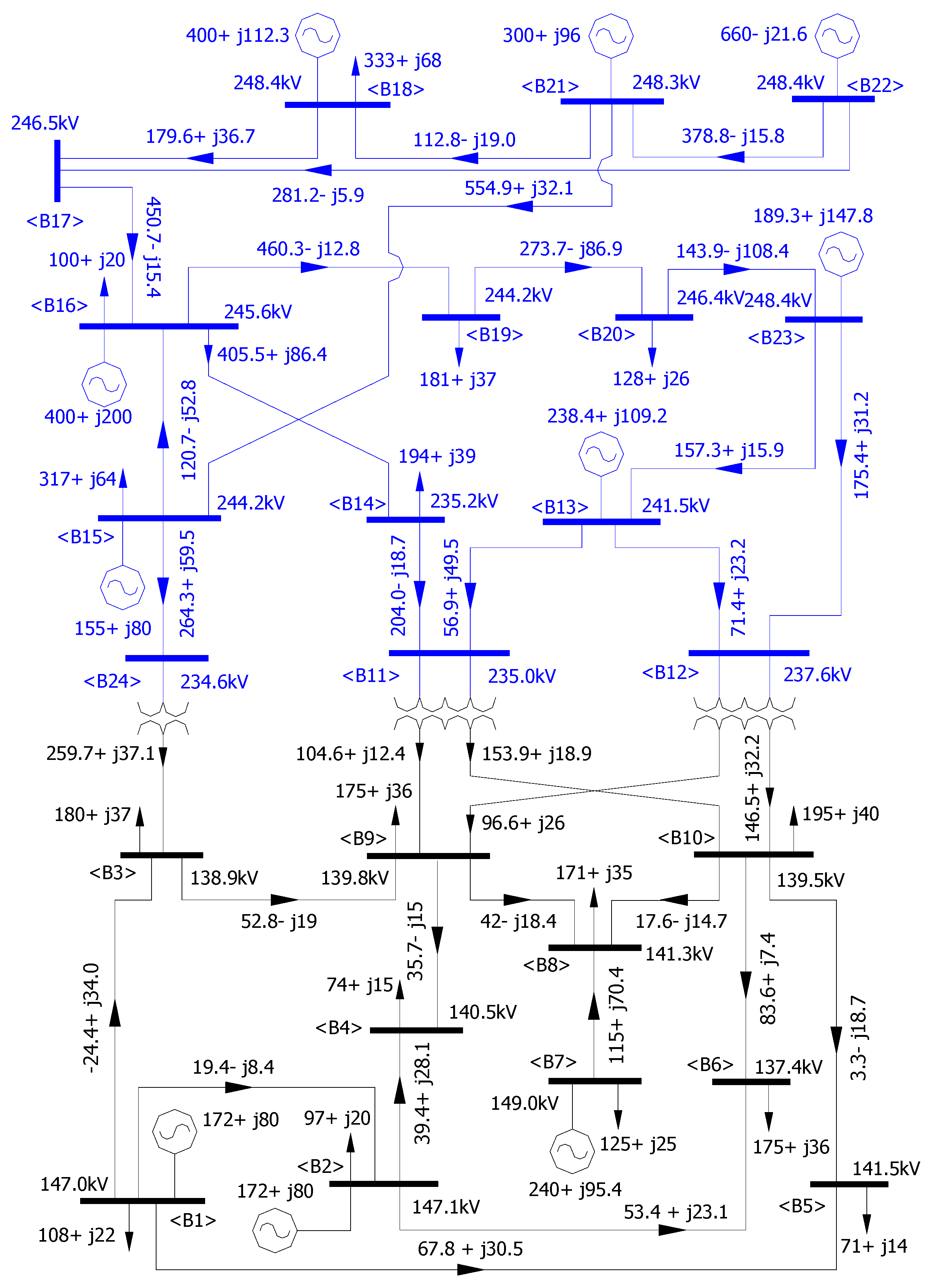
Section 3 explains the methods for designing POD of STATCOM and selecting the location of STATCOM-POD and location of the feedback. The details of the test cases are given in
Section 4. Finally, the conclusion is outlined in
Section 5 and the Arnoldi algorithm, QR decomposition, and parameters of the STATCOM are detailed in
Appendix A.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}