
EMTP Model of a Bidirectional Cascaded Multilevel Solid State Transformer for Distribution System Studies

Abstract
:1. Introduction
2. Solid State Transformer Configuration and Switching Strategies
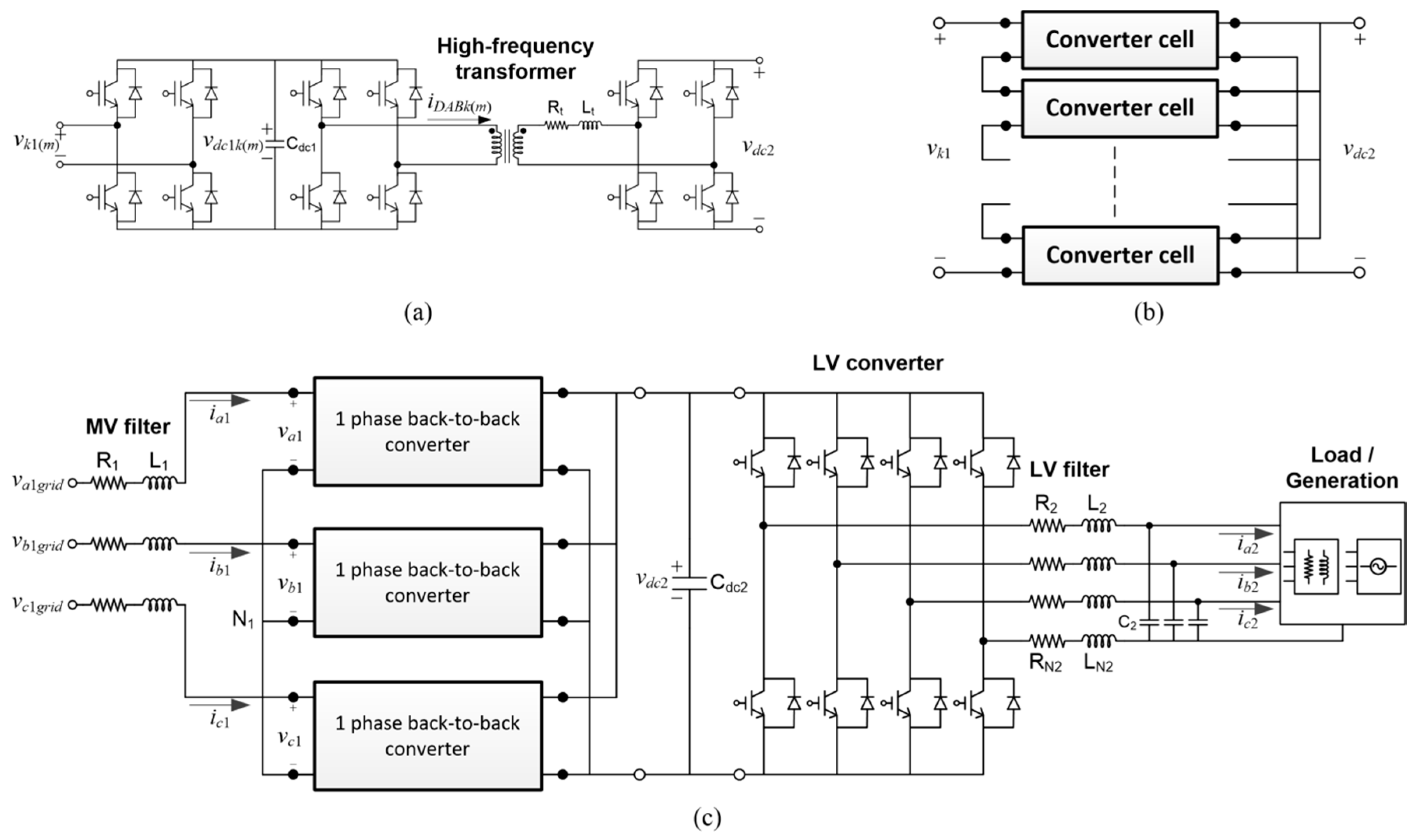
2.1. SST Configuration
2.2. Switching Strategies and Control Description
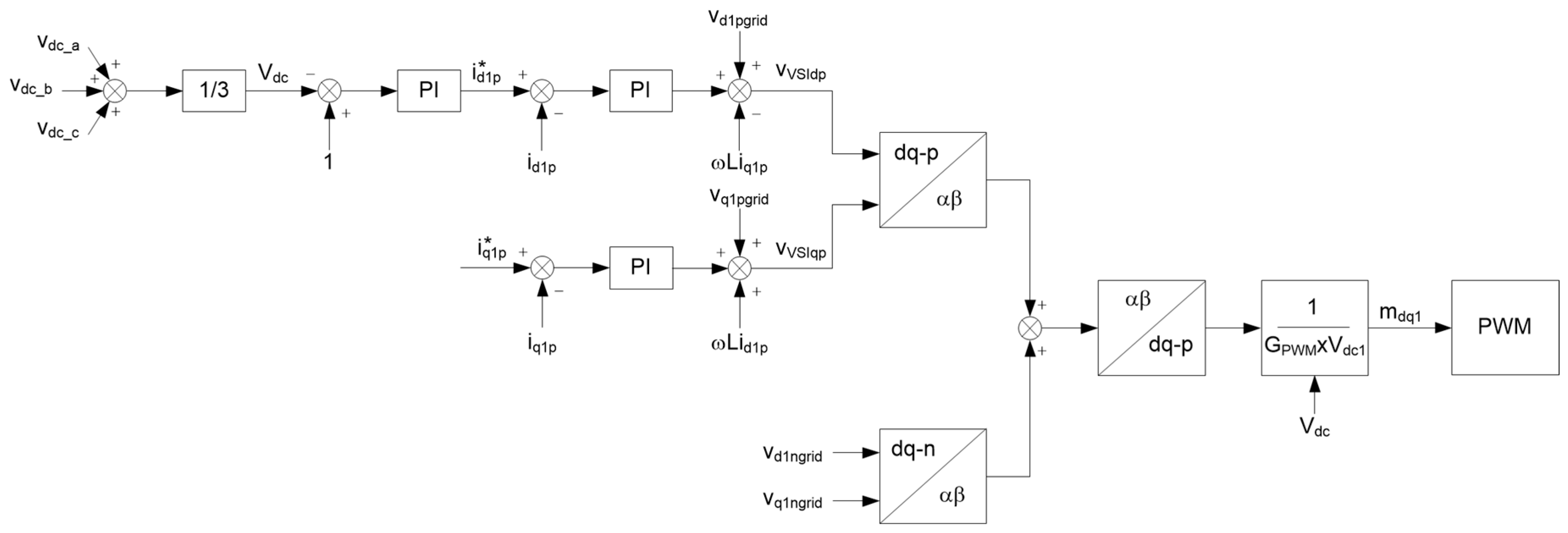
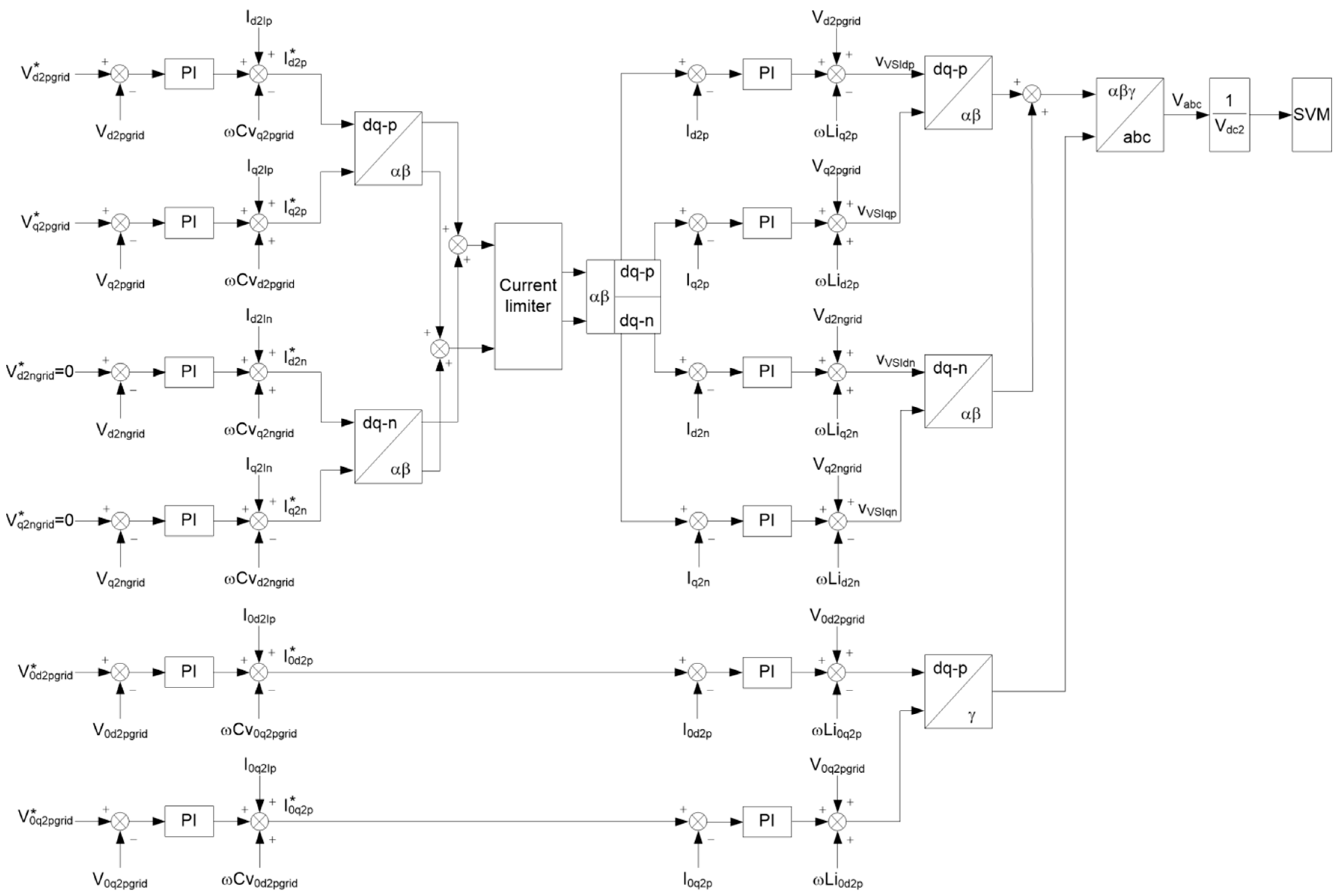
- The positive-sequence grid voltage is used to obtain the grid angle for synchronization purposes by means of a phase-locked loop (PLL) [23].
- The negative-sequence grid voltage is fed-forwarded to the switching strategy that has to be generated at the converter terminals; therefore, no negative sequence voltage is seen by the inductive filter and only positive-sequence currents flow between the grid and the converter, even in presence of asymmetrical grid disturbances; see Figure 2.
3. Testing the Performance of the SST Model
3.1. Test System and Modeling Guidelines
3.2. Case Studies
- (i)
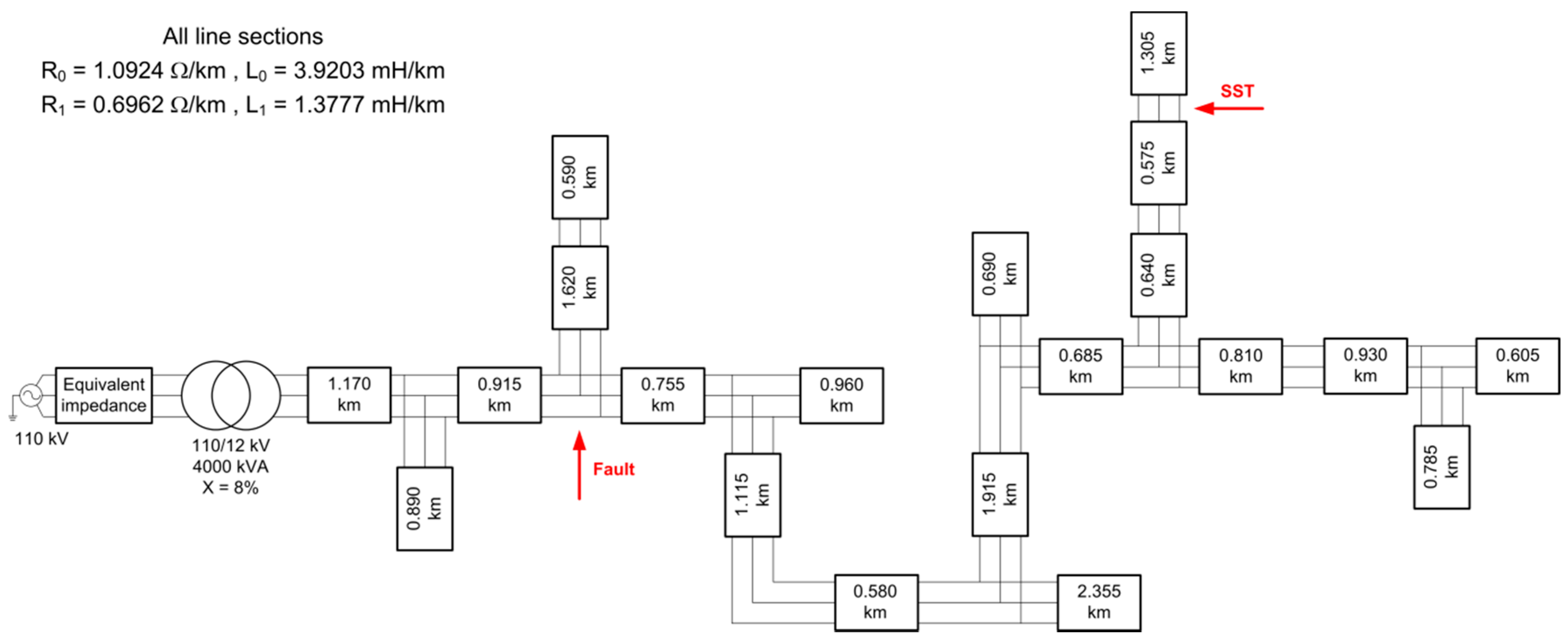
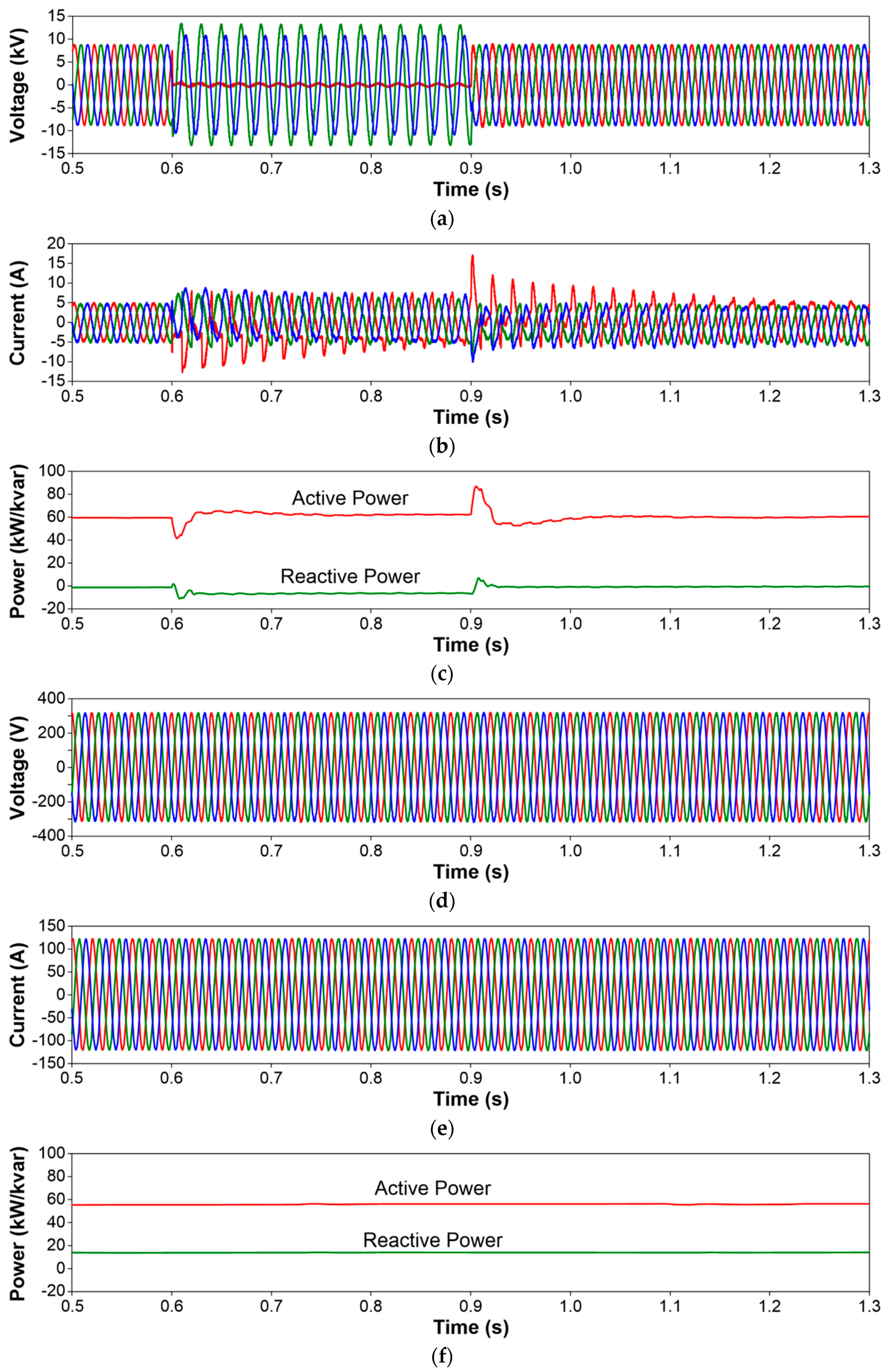
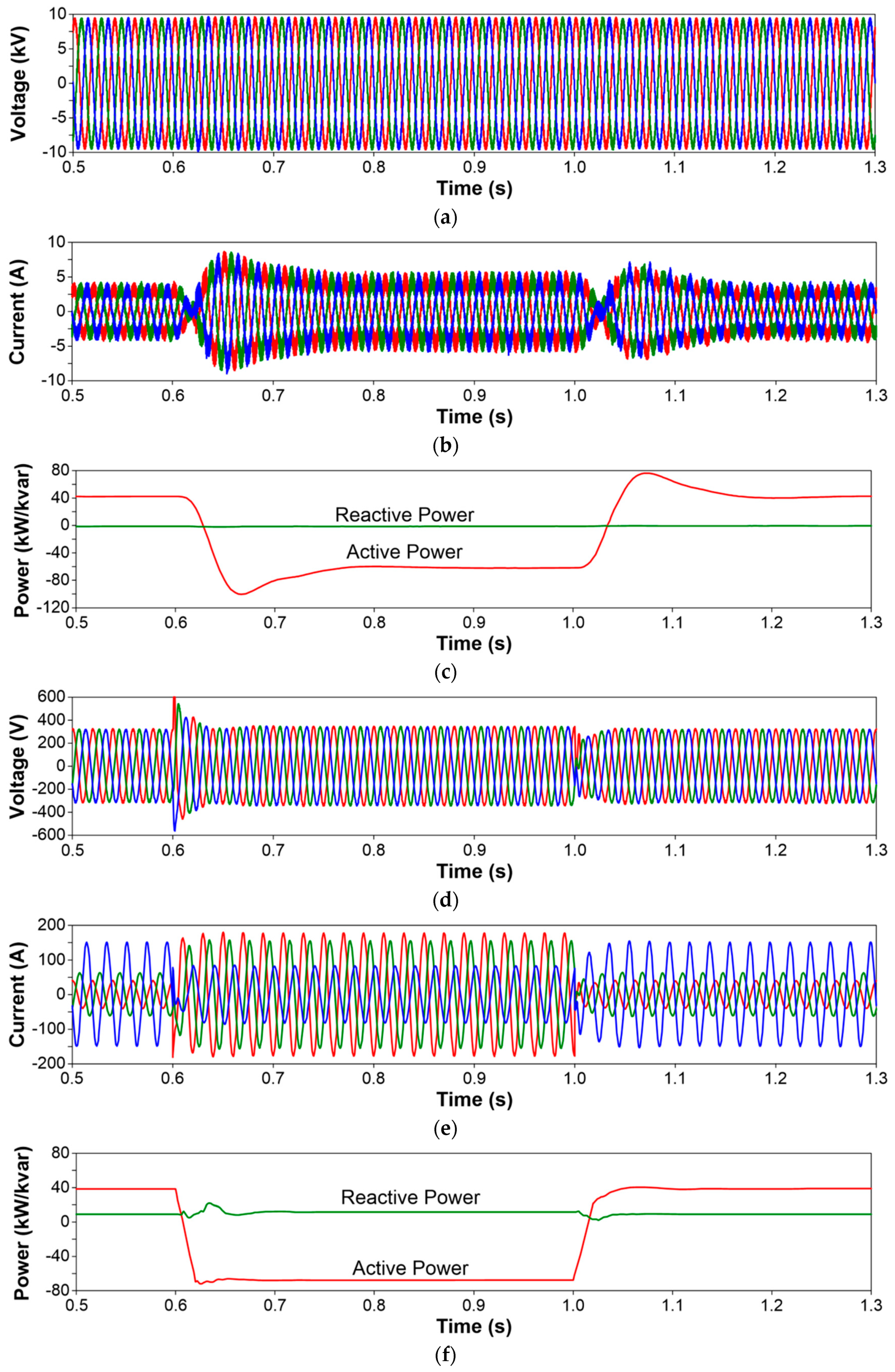
- Voltage sags and swells at MV terminals: Due to the grounding system selected for the test system, a single-phase-to-ground fault in the MV network (see fault location in Figure 6) will cause a voltage sag at the faulted phase MV terminals of the SST, and two voltage swells at the unfaulted phase terminals. The simulation results related to this case (see Figure 7) prove clearly that the voltage unbalance that occurs in the primary side of the SST is not propagated to the secondary side, where the phase voltages and currents remain constant and balanced. Note that the peak values of the currents during the fault condition are lower in the SST phases in which the fault causes swells and that the SST recovers current balance once the fault condition disappears.
- (ii)
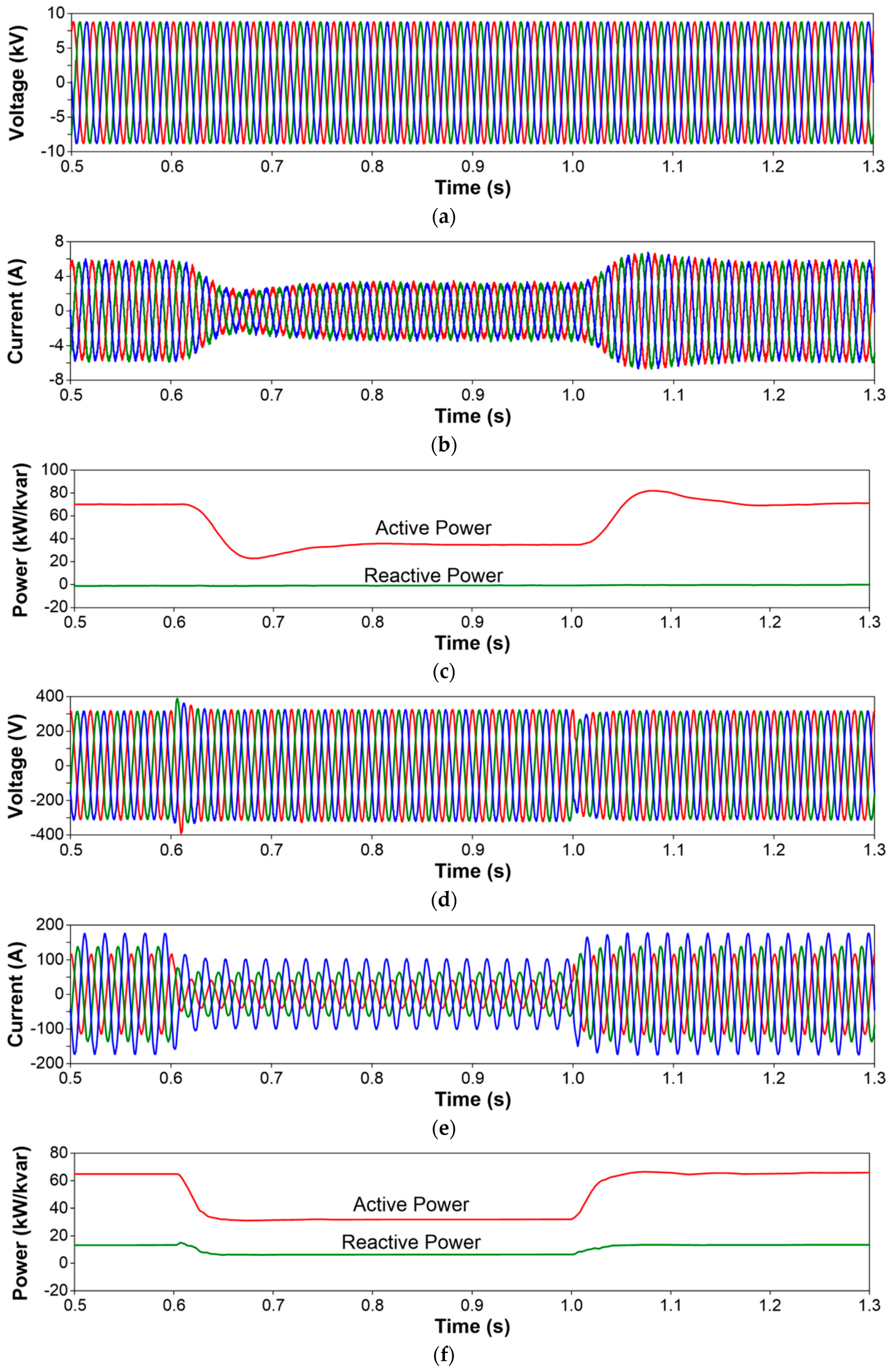
- Load variation: A decrement of the load supplied from the LV terminals occurs in an initially unbalanced load. The SST behavior translates the load decrement to the active power measured at the MV terminals while the load unbalance is noticed neither before nor during nor after the load variation. Figure 8 shows that the active power variation is also detected at the MV terminals but the secondary current unbalance is not propagated to the primary currents. The voltages at the secondary side are not affected by the current unbalance, and they remain constant and balanced.
- (iii)
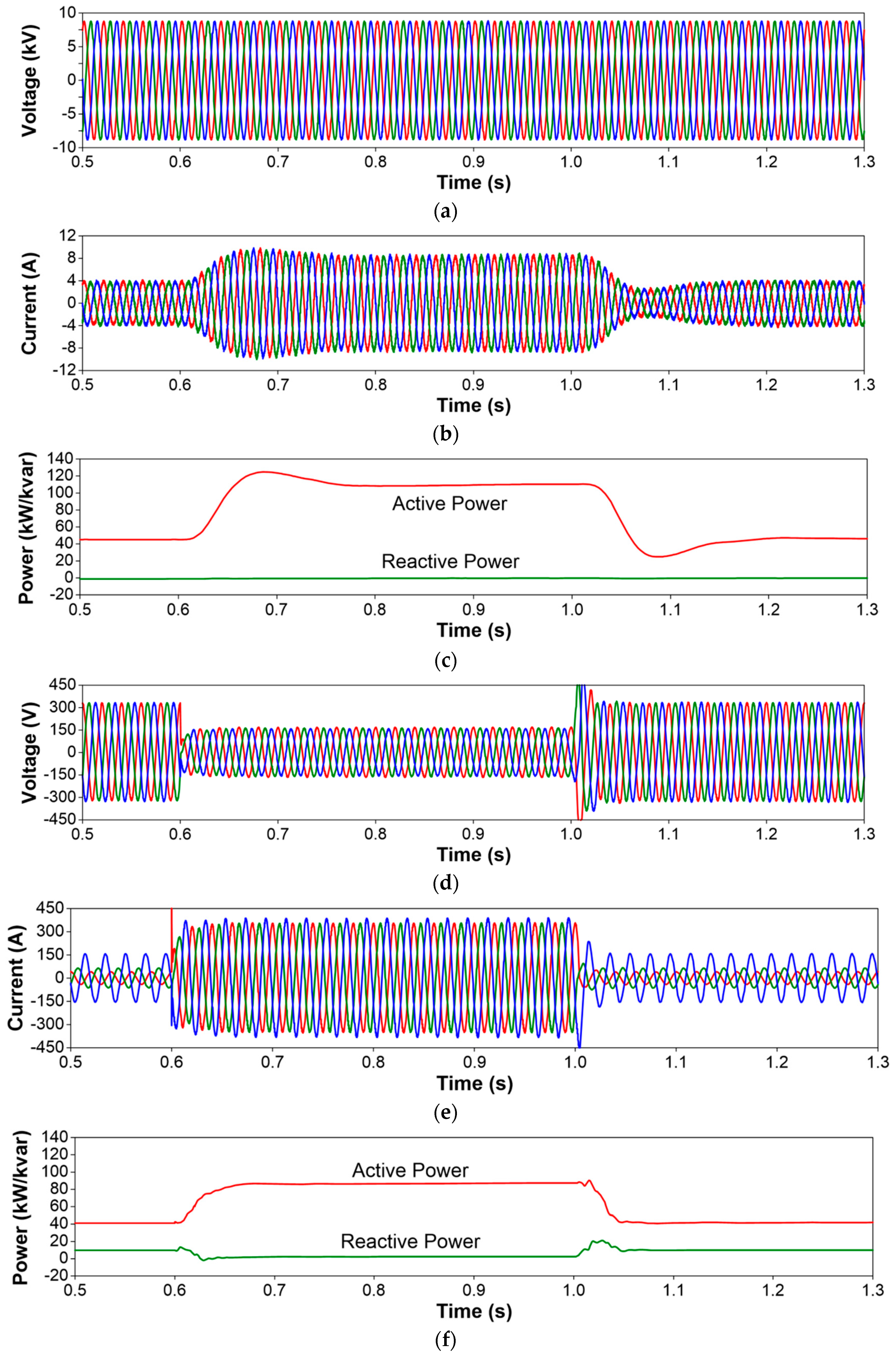
- Power flow reversal: A power flow reversal is caused by the presence of both load and generation at the secondary side. As deduced from Figure 9, the load initially exceeds the generation, but during a short period this situation is reversed. Note that, as with the previous case study, the currents at the LV terminals are always unbalanced but the currents measured at the MV terminals are always balanced. This case simultaneously illustrates two of the main advantages of the SST, its capabilities to quickly control a power flow reversal between its terminals and to balance MV currents, irrespective of the situation at the LV terminals.
- (iv)
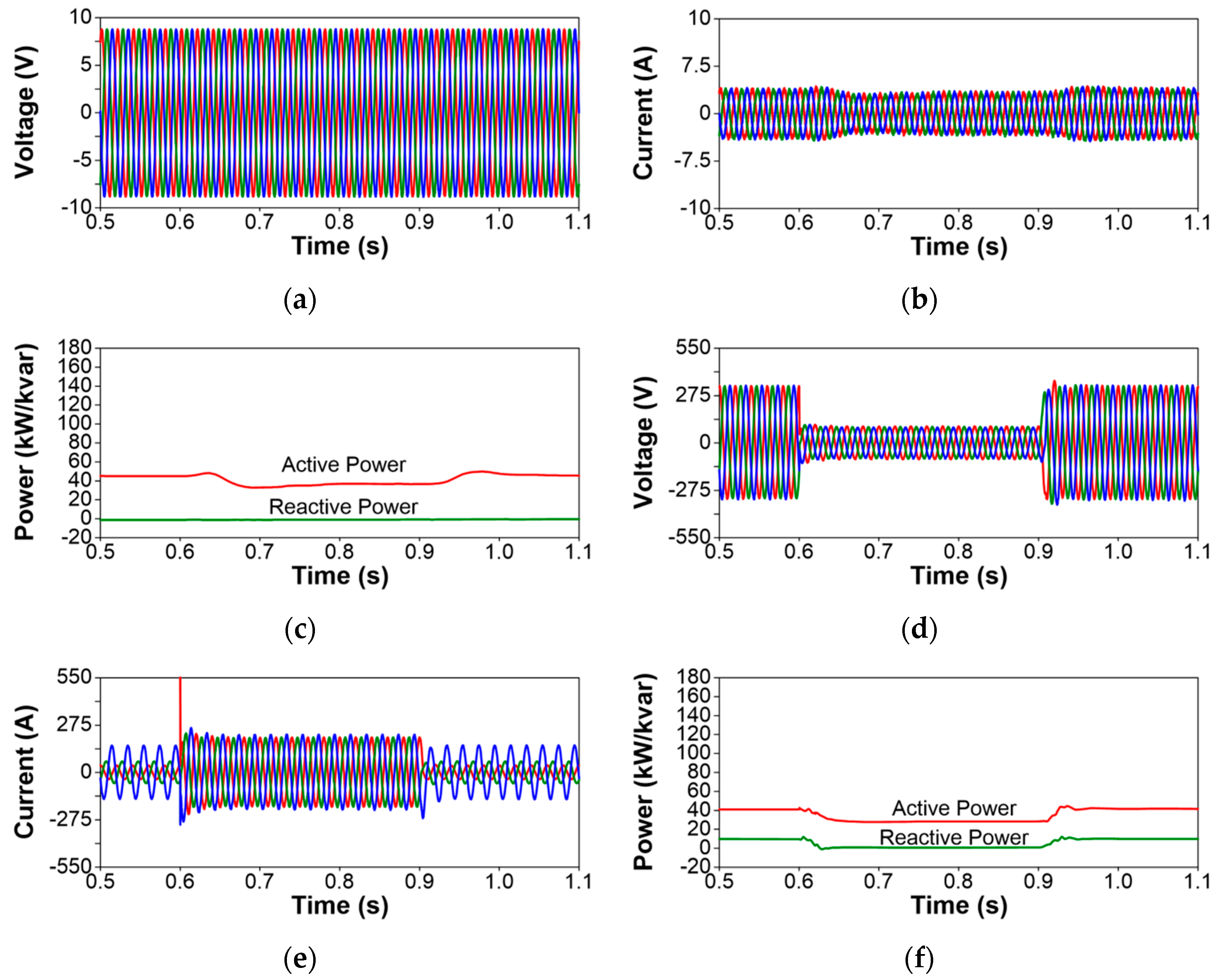
- Short-circuit at the LV terminals: A bolted three-phase short-circuit occurs at the LV terminals; to avoid overcurrents that could damage the converter, the output current peak is limited to 350 A. The fault is seen from the MV side as a load increase that does not depend on the initial load level, although there can be current increase above the specified limit due to the initial current. This behavior can be understood from the analysis of waveforms shown in Figure 10. As a result of the current increase caused by the fault, secondary-side voltages decrease; consequently, the SST primary side detects a small power increase that is finally translated to an increment of the MV-side currents. With the specified current limit the maximum power measured at the MV terminals during the fault condition is close to the assumed rated power (i.e., 100 kVA); this value is only exceeded at the beginning and the end of the transient caused by the fault. Note that there can be current spikes exceeding the maximum accepted current value at the beginning and the end of the short-circuit condition.
3.3. Discussion
- An aspect to be considered is the ride-through capabilities of the SST. Figure 7 presents the SST response in front of voltage sags and swells at the primary side. The SST can prevent the propagation of both sags and swells to the secondary side whose load will not notice the event. However, it is important to take into account that there is a limit to the sag/swell severity and duration the SST can cope with and that limit depends on the parameters selected for the power converter components and their controllers. This basically means that the SST design used in this work can provide an adequate response depending on the number of phases affected by the fault, the severity (e.g., residual voltage) and the duration of the sags/swells at the MV-side terminals. For instance, the response in front of a three-phase voltage sag with a low residual voltage and long duration (e.g., 1 s) would not be adequate and the device would not be capable of recovering the operating conditions prior to the fault once the fault conditions disappeared.
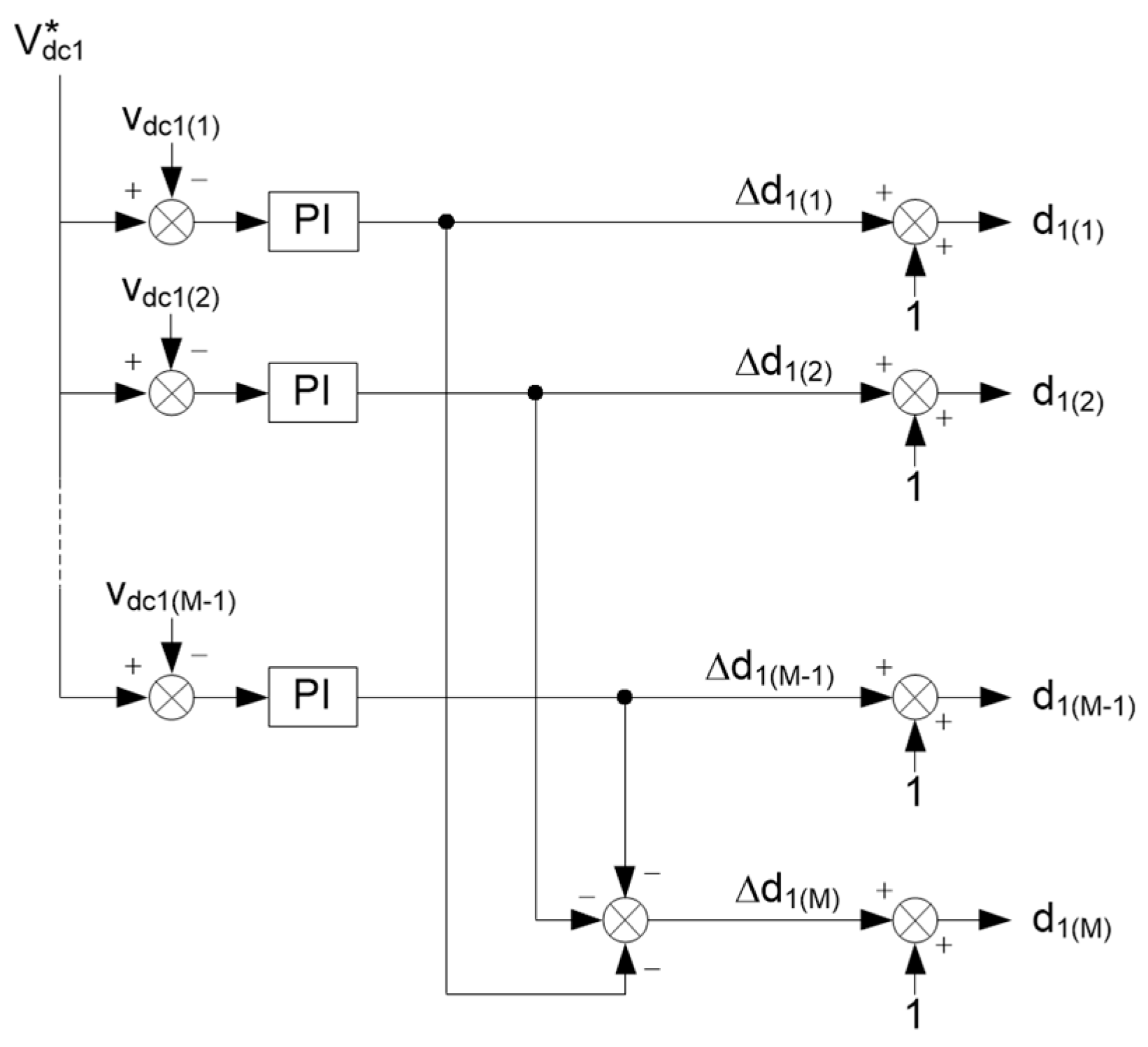
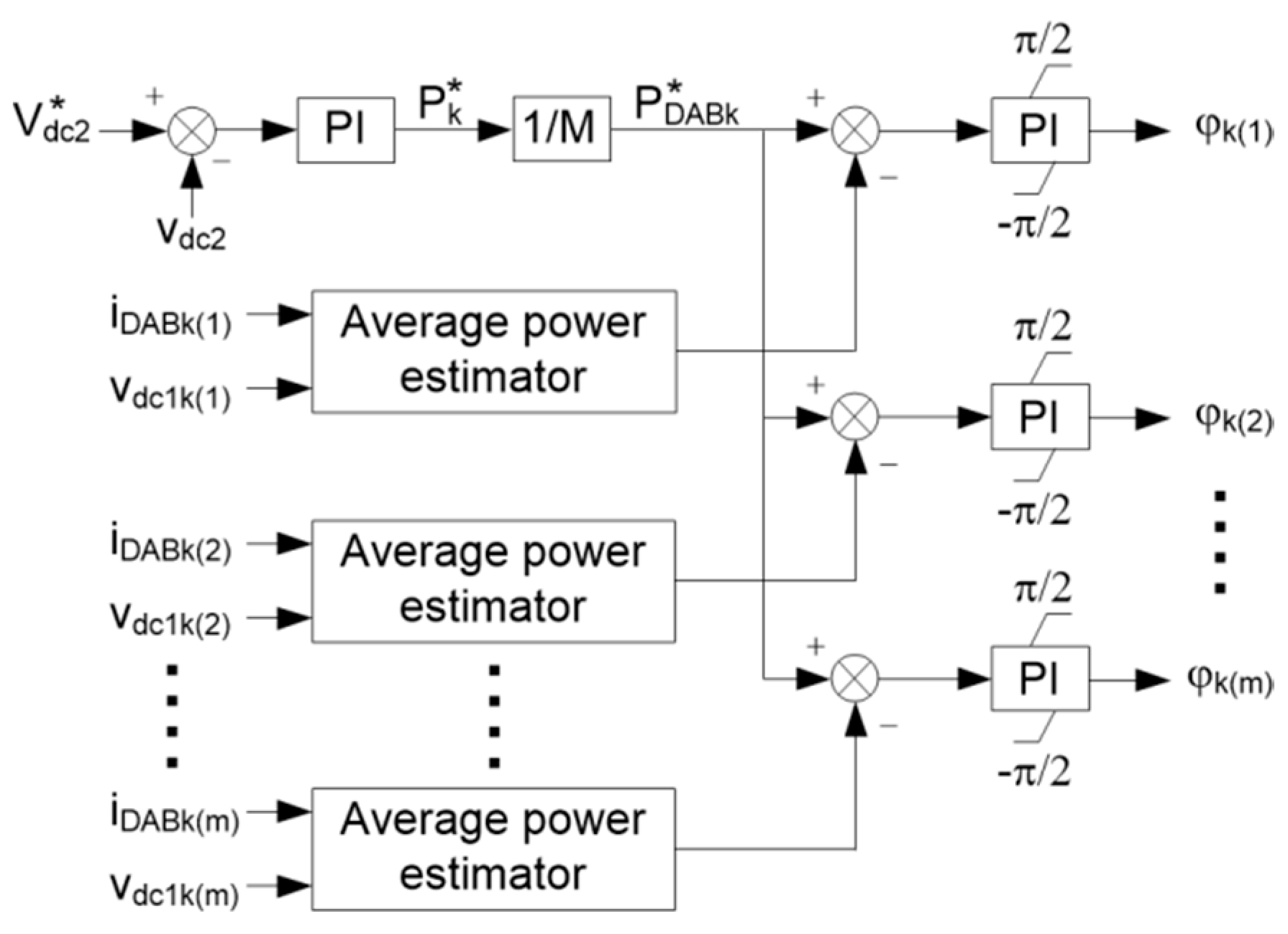
- An important aspect of the new SST design is the requirement of a controller that could guarantee a uniform distribution of voltages in the cells that form a single-phase section of the front-end MV multilevel converter. Since the cells of a single-phase section are connected in series at the grid side and in parallel at the load side, a voltage balancing strategy in the controller of the MV side multilevel converter is required. The performance of the strategy implemented in the present model has been tested by analyzing the voltages that results at the MV dc links during the steady and transient period of two test cases analyzed above, namely the voltage sag and swell caused by a short-circuit in the test system (see Figure 7) and the power flow reversal caused by an increase of the generation connected to the LV side of the SST (see Figure 9). The target of the control of MV dc links is to keep the voltage across each MV capacitor as close as possible to 2 kV. Figure 11 and Figure 12 show the voltages across some dc links of each phase for the two case studies mentioned above. Remember that there are 6 per phase. According to these results, the deviations in all dc links with the current SST design caused before and after the transient in each case study are smaller than 8% with respect to the targeted value. On the other hand, one can observe that the response is the same in all dc links of a given phase and very similar between phases in case of flow reversal; in the case shown in Figure 11 (i.e., a voltage sag in phase A and a voltage swell in phases B and C) the response depends on the phase. This supports the choice of the controller proposed in this work to balance dc voltages and keep them within acceptable margins.
- As illustrated with the last case study, the LV-side controller can limit the current to be supplied from the LV terminals in order to avoid large overcurrents caused by either overloads or short-circuits. Although without this limit the SST design can cope with the largest short-circuit currents and the LV-side dc link would be capable of recovering its voltage after the fault condition disappeared at the LV terminals, with this limit the effect of a short-circuit is translated to the MV terminals as an affordable overload. Actually with a limit of 350 A, the power measured at the MV terminals is above the SST rated power (i.e., 100 kVA) only during the transient that occurs at the beginning of the fault. This means that if the initial load was larger, but below 100 kVA, the impact of the selected current peak limit would cause a load decrease. Figure 13 and Figure 14 illustrate the SST behavior with other current peak limits, namely 200 and 400 A. One can observe the different response of the SST: with a limit of 200 A, the short-circuit is seen from the MV side as a load decrement (i.e., the active power is always below the SST rated power), but with a limit of 400 A the power measured at the MV side is above the SST rated power. If the current peak was not limited the active power measured at the MV side would rise to above three times the SST rated power.
- A first approach for selecting the number of modules that should be considered for the MV side design could be based on the recommendations presented in [10]. According to this reference, there are no simple rules that could cover all applications and the semiconductor ratings have to be selected case by case. In general, power semiconductor ratings can be chosen to handle overvoltages without the need of installing expensive external overvoltage protection; in such case a security factor should be used depending on the supply power quality. Given that semiconductors with rated blocking voltages as high as 6.5 kV are currently available in the market [10], the configuration selected for this work (i.e., a six series-connected cells per phase; see Figure 1) could be practically implemented. However, a trade-off between the number of levels and the quality of the waveforms (for both currents and voltages) to be obtained will always exist; therefore, a higher number of levels could be needed for representing the SST analyzed here. As mentioned in Section 3.1, although 6 levels is a realistic choice, eight to ten levels might be also good a choice to cope with overvoltages, exhibit good quality waveforms, and use semiconductors with blocking voltages below 6.5 kV.
- As already mentioned, the SST model analyzed in this work has been implemented in the ATP version of the EMTP. Given the complexity of the modular multilevel configuration depicted in Figure 1, the number of levels with which the model has been represented was selected as a trade-off between the simulation time for a single run and the accuracy with which results could be obtained. Although simulation results with less than 6 levels were carried out and almost negligible differences could be noticed between results with four or six levels, this last option was selected because that could represent a more realistic configuration that could be actually implemented in the lab for building a 12 kV MV side SST design. Actually, it is obvious that to obtain more accurate results rather than increasing the number of levels above six, one should consider other aspects such as the representation of semiconductor losses. Notice that without including semiconductor losses, the rated voltages assumed for any SST semiconductor is irrelevant; however, if a realistic representation of losses is desired, then the rated voltages to be selected for the semiconductors of all stages would be crucial as well as the number of levels with which the multilevel configuration of Figure 1 should be create.
- The selection of the various parameters that have to be specified in the implemented SST model (i.e., controllers and filter parameters) was made following different approaches. In some cases, they were selected following the recommendations made by other authors. For instance, parameters of the input stage controllers were selected according to some rules provided in [24]. Other parameters, such as all those required for modelling the isolation stage and the LV-side output stage were basically those used in some previous papers by the authors; see [15,16,17]. Since the selection of some parameters was made without following any optimization procedure, a better selection remains as a future work. In any case it is worth mentioning the difficulties that are expected for some tasks. Consider, for instance, the selection of the PI controller values and filter parameters of the LV-side output converter. A flexible design of that converter should consider highly distorted LV currents due to the presence of nonlinear loads at the LV SST terminals. As with the ride-through capabilities discussed above, the present design of the output stage can cope with some harmonic distortion in the LV currents (see, for instance, simulation results presented in [15,16,17]), but above certain distortion level of the load currents the SST terminal voltage could be unacceptably distorted. A remaining task to solve these issues in the incorporation of harmonic compensation in the LV-side controllers.
4. Conclusions
Author Contributions
Conflicts of Interest
References
- Kang, M.; Enjeti, P.N.; Pitel, I.J. Analysis and design of electronic transformers for electric power distribution system. IEEE Trans. Power Electron. 1999, 14, 1133–1141. [Google Scholar] [CrossRef]
- Wang, D.; Mao, C.X.; Lu, J.M.; Fan, S.; Peng, F. Theory and application of distribution electronic power transformer. Electr. Power Syst. Res. 2007, 77, 219–226. [Google Scholar] [CrossRef]
- Fan, H.; Li, H. High-frequency transformer isolated bidirectional dc-dc converter modules with high efficiency over wide load range for 20 kVA solid-state transformer. IEEE Trans. Power Electron. 2011, 26, 3599–3608. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Burgos, R. Review of solid-state transformer technologies and their application in power distribution systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 186–198. [Google Scholar] [CrossRef]
- EPRI Report Development of a New Multilevel Converter-Based Intelligent Universal Transformer: Design Analysis; EPRI: Palo Alto, CA, USA, 2004.
- Dommel, H.W. EMTP Theory Book; Bonneville Power Administration: Portland, OR, USA, 1986. [Google Scholar]
- IEC Standard Voltages, 7.0 ed.; International Electrotechnical Committee (IEC) Standard 60038; IEC: Geneva, Switzerland, 2009.
- Kouro, S.; Malinowski, M.; Gopakumar, K.; Pou, J.; Franquelo, L.G.; Wu, B.; Rodriguez, J.; Pérez, M.A.; Leon, J.I. Recent advances and industrial applications of multilevel converters. IEEE Trans. Ind. Electron. 2010, 57, 2553–2580. [Google Scholar] [CrossRef]
- Rodríguez, J.; Bernet, S.; Wu, B.; Pontt, J.O.; Kouro, S. Multilevel voltage-source-converter topologies for industrial medium-voltage drives. IEEE Trans. Ind. Electron. 2007, 54, 2930–2945. [Google Scholar] [CrossRef]
- Abu-Rub, H.; Holtz, J.; Rodriguez, J.; Baoming, G. Medium-voltage multilevel converters-State of the art, challenges, and requirements in industrial applications. IEEE Trans. Ind. Electron. 2010, 57, 2581–2596. [Google Scholar] [CrossRef]
- Backlund, B.; Carroll, E. Voltage Ratings of High Power Semiconductors; ABB Semiconductors: Lenzburg, Switzerland, 2006. [Google Scholar]
- González, F.; Martin-Arnedo, J.; Alepuz, S.; Martinez, J.A. EMTP model of a bidirectional multilevel solid state transformer for distribution system studies. In Proceedings of the IEEE PES General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Zhao, T.; Wang, G.; Bhattacharya, S.; Huang, A.Q. Voltage and power balance control for a cascaded H-bridge converter-based solid-state transformer. IEEE Trans. Power Electron. 2013, 28, 1523–1532. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Ni, X. A cost effective power sharing strategy for a cascaded multilevel converter based solid state transformer. In Proceedings of the IEEE Energy Conversion Congress Exposition (ECCE), Denver, CO, USA, 15–19 September 2013. [Google Scholar]
- Alepuz, S.; González, F.; Martin-Arnedo, J.; Martinez, J.A. Solid state transformer with low-voltage ride-through and current unbalance management capabilities. In Proceedings of the 39th Annual Conference IEEE Industrial Electronics Society (IECON), Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Alepuz, S.; González-Molina, F.; Martin-Arnedo, J.; Martinez-Velasco, J.A. Development and testing of a bidirectional distribution electronic power transformer model. Electr. Power Syst. Res. 2014, 107, 230–239. [Google Scholar] [CrossRef]
- Martinez-Velasco, J.A.; Alepuz, S.; González-Molina, F.; Martin-Arnedo, J. Dynamic average modeling of a bidirectional solid state transformer for feasibility studies and real-time implementation. Electr. Power Syst. Res. 2014, 117, 143–153. [Google Scholar] [CrossRef]
- She, X.; Yu, X.; Wang, F.; Huang, A.Q. Design and demonstration of a 3.6-kV–120-V/10-kVA solid-state transformer for smart grid application. IEEE Trans. Power Electron. 2014, 29, 3982–3996. [Google Scholar] [CrossRef]
- Huber, J.E.; Kolar, J.W. Common-mode currents in multi-cell solid-state transformers. In Proceedings of the 2014 International Power Electronics Conference, Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- Huber, J.E.; Kolar, J.W. Volume/weight/cost comparison of a 1 MVA 10 kV/400 V solid-state against a conventional low-frequency distribution transformer. In Proceedings of the IEEE Energy Conversion Congress Exposition (ECCE), Pittsburgh, PA, USA, 14–18 November 2014. [Google Scholar]
- Garcia Montoya, R.J.; Mallela, A.; Balda, J.C. An evaluation of selected solid-state transformer topologies for electric distribution systems. In Proceedings of the IEEE Applied Power Electronics Conference Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015. [Google Scholar]
- Kim, D.; Lee, D. Inverter output voltage control of three-phase UPS systems using feedback linearization. In Proceedings of the 33rd Annual Conference IEEE Industrial Electronics Society (IECON), Taipei, Taiwan, 5–8 November 2007. [Google Scholar]
- Dai, J.; Xu, D.; Wu, B. A novel control scheme for current-source-converter-based PMSG wind energy conversion systems. IEEE Trans. Power Electron. 2009, 24, 963–972. [Google Scholar]
- Lee, D.; Jang, J. Output voltage control of PWM inverters for stand-alone wind power generation systems using feedback linearization. In Proceedings of the 14th Industry Applications Society Annual Meeting, Hong Kong, China, 2–6 October 2005. [Google Scholar]
- De Doncker, R.W.; Divan, D.M.; Kheraluwala, M.H. A three-phase soft-switched high-power-density dc-dc converter for high power applications. IEEE Trans. Ind. Appl. 1991, 27, 63–73. [Google Scholar] [CrossRef]
- Perales, M.A.; Prats, M.M.; Portillo, R.; Mora, J.L.; Leon, J.I.; Franquelo, L.G. Three-dimensional space vector modulation in abc coordinates for four-leg voltage source converters. IEEE Power Electron. Lett. 2003, 99, 104–109. [Google Scholar] [CrossRef]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-dimensional space vector modulation for four-leg voltage-source converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Vechiu, I.; Curea, O.; Camblong, H. Transient operation of a four-leg inverter for autonomous applications with unbalanced load. IEEE Trans. Power Electron. 2010, 25, 399–407. [Google Scholar] [CrossRef]
- Ebrahimzadeh, E.; Farhangi, S.; Iman-Eini, H.; Blaabjerg, F. Modulation technique for four-leg voltage source inverter without a look-up table. IET Power Electron. 2016, 9, 648–656. [Google Scholar] [CrossRef]
- Gole, A.M.; Keri, A.; Nwankpa, C.; Gunther, E.W.; Dommel, H.W.; Hassan, I.; Marti, J.R.; Martinez, J.A.; Fehrle, K.G.; Tang, L.; et al. Guidelines for modeling power electronics in electric power engineering applications. IEEE Trans. Power Deliv. 1997, 12, 505–514. [Google Scholar] [CrossRef]
- Sen, K.K.; Sen, M.L. Introduction to FACTS Controller: Theory, Modeling, and Applications; IEEE Press and John Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Spitsa, V.; Salcedo, R.; Ran, X.; Martinez, J.; Uosef, R.; de León, F.; Czarkowski, D.; Zabar, Z. Three-phase time-domain simulation of very large distribution networks. IEEE Trans. Power Deliv. 2012, 27, 677–687. [Google Scholar] [CrossRef]
- De Leon, F.; Salcedo, R.; Ran, X.; Martinez-Velasco, J.A. Time-Domain Analysis of the Smart Grid Technologies: Possibilities and Challenges. In Transient Analysis of Power Systems: Solution Techniques, Tools and Applications; Martinez-Velasco, J.A., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Primary side filter resistance (R1) | 0.5 Ω |
| Primary side filter inductance (L1) | 10 mH |
| MV DC link capacitance (Cdc1) | 500 µF |
| LV DC link capacitance (Cdc2) | 3000 µF |
| Secondary side filter resistance (R2) | 0.1 Ω |
| Secondary side filter inductance (L2) | 2 mH |
| Secondary side filter capacitance (C2) | 470 µF |
| Neutral resistance (Rn) | 0.1 Ω |
| Neutral inductance (Ln) | 1 mH |
| Rectifier/Inverter switching frequency | 10 kHz |
| Transformer operating frequency | 2 kHz |
| Transformer short-circuit resistance (Rt) | 0.1 Ω |
| Transformer leakage inductance (Lt) | 1 mH |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martin-Arnedo, J.; González-Molina, F.; Martinez-Velasco, J.A.; Adabi, M.E. EMTP Model of a Bidirectional Cascaded Multilevel Solid State Transformer for Distribution System Studies. Energies 2017, 10, 521. https://doi.org/10.3390/en10040521
Martin-Arnedo J, González-Molina F, Martinez-Velasco JA, Adabi ME. EMTP Model of a Bidirectional Cascaded Multilevel Solid State Transformer for Distribution System Studies. Energies. 2017; 10(4):521. https://doi.org/10.3390/en10040521
Chicago/Turabian StyleMartin-Arnedo, Jacinto, Francisco González-Molina, Juan A. Martinez-Velasco, and Mohammad Ebrahim Adabi. 2017. "EMTP Model of a Bidirectional Cascaded Multilevel Solid State Transformer for Distribution System Studies" Energies 10, no. 4: 521. https://doi.org/10.3390/en10040521
APA StyleMartin-Arnedo, J., González-Molina, F., Martinez-Velasco, J. A., & Adabi, M. E. (2017). EMTP Model of a Bidirectional Cascaded Multilevel Solid State Transformer for Distribution System Studies. Energies, 10(4), 521. https://doi.org/10.3390/en10040521