
Supercapacitor State Based Control and Optimization for Multiple Energy Storage Devices Considering Current Balance in Urban Rail Transit


Abstract
:1. Introduction
2. The Model and Control of ESD
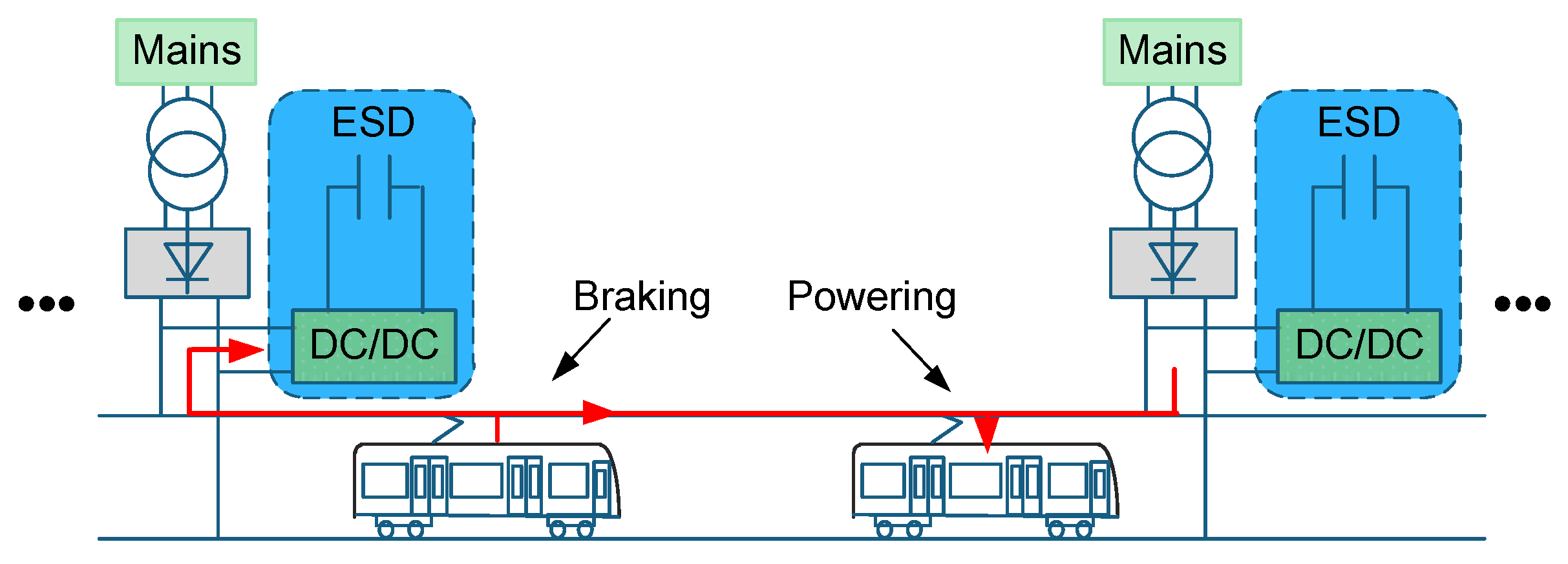
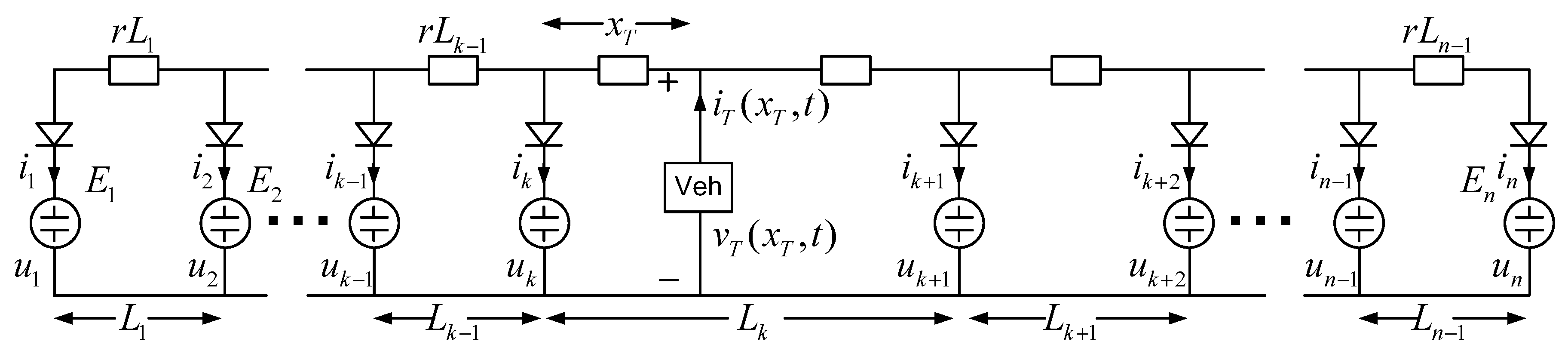
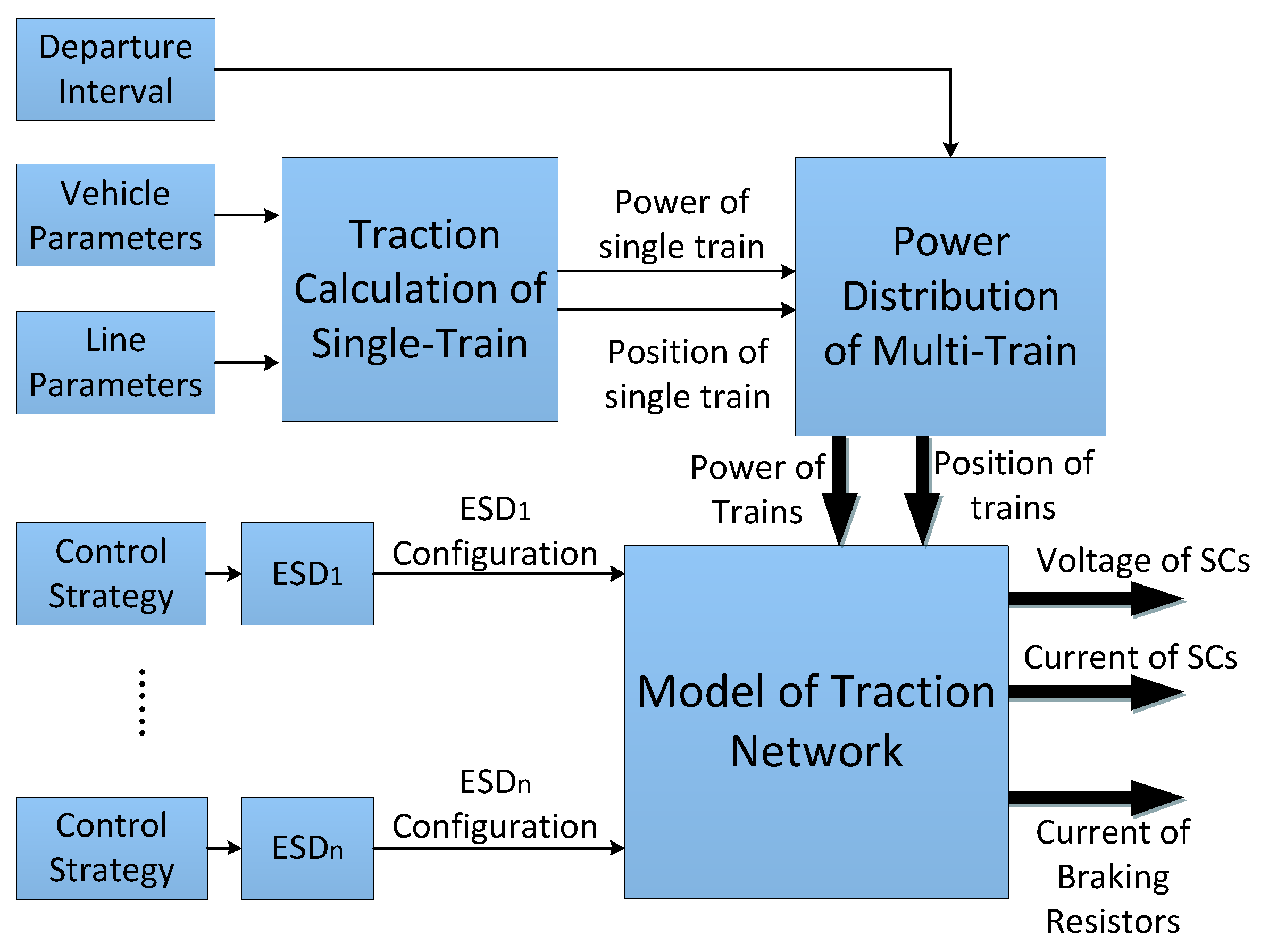
2.1. The Traction Power Supply System Model of Urban Rail Transit
2.2. The SC State-Based Control Strategy
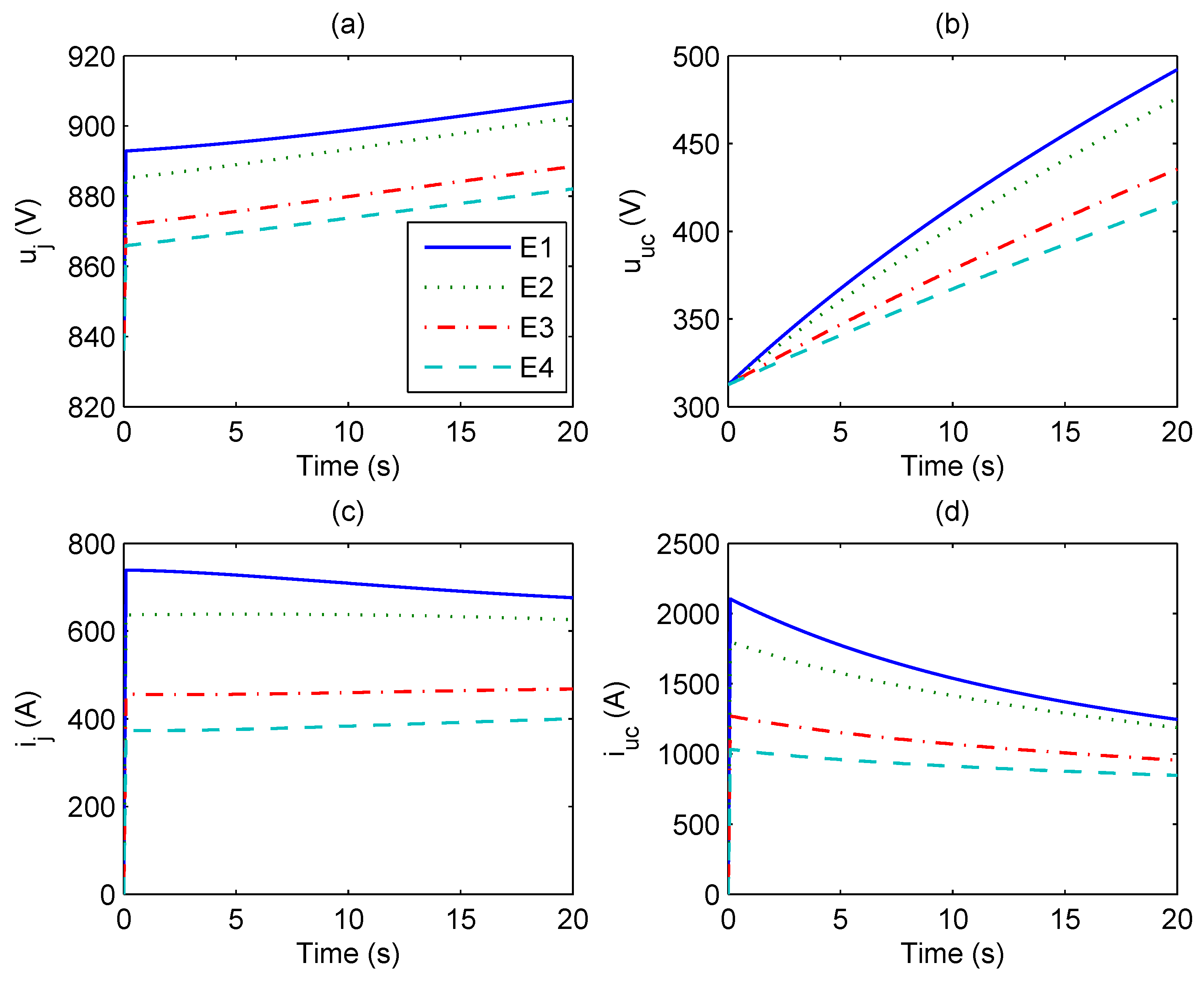
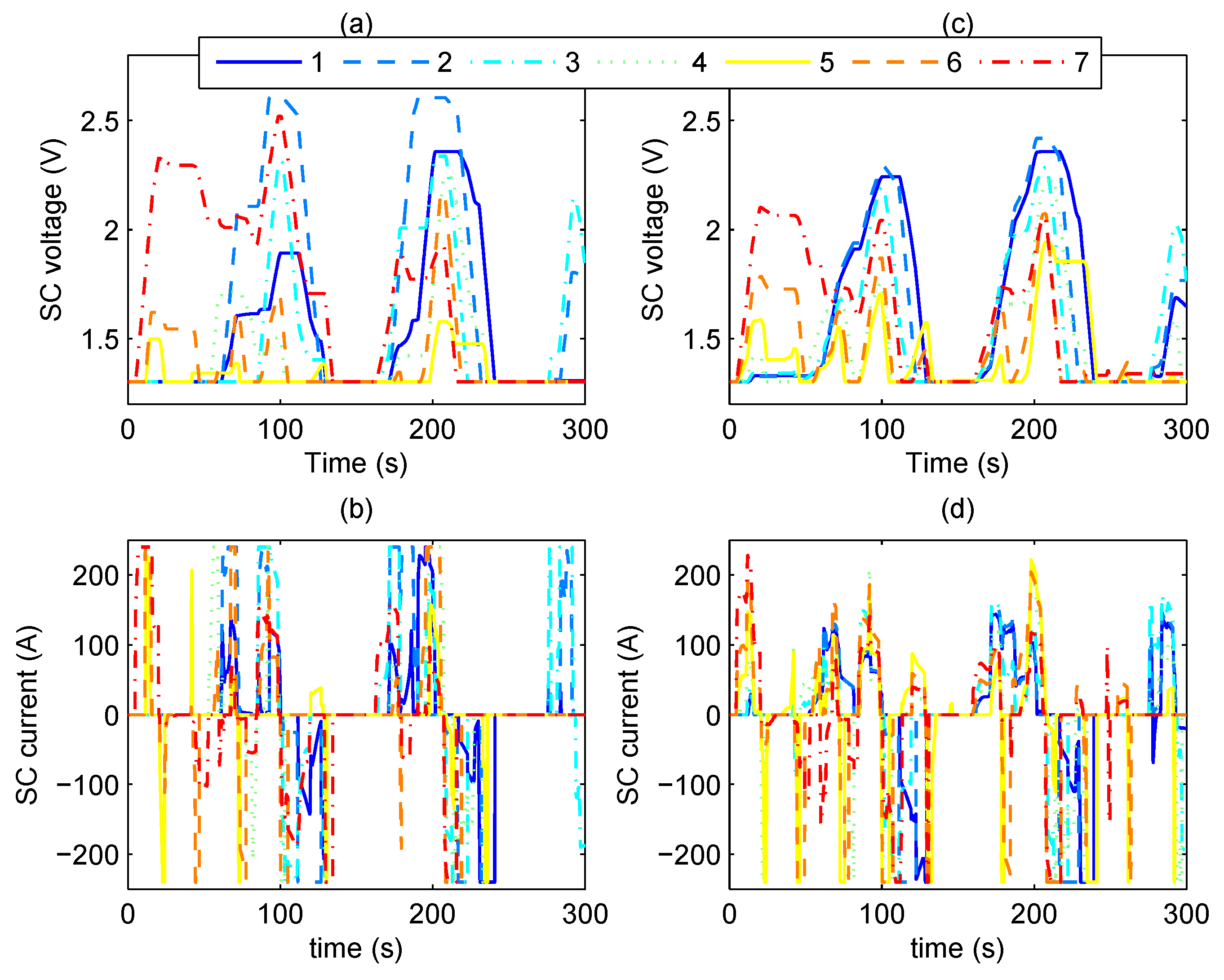
2.3. Simulation Comparison
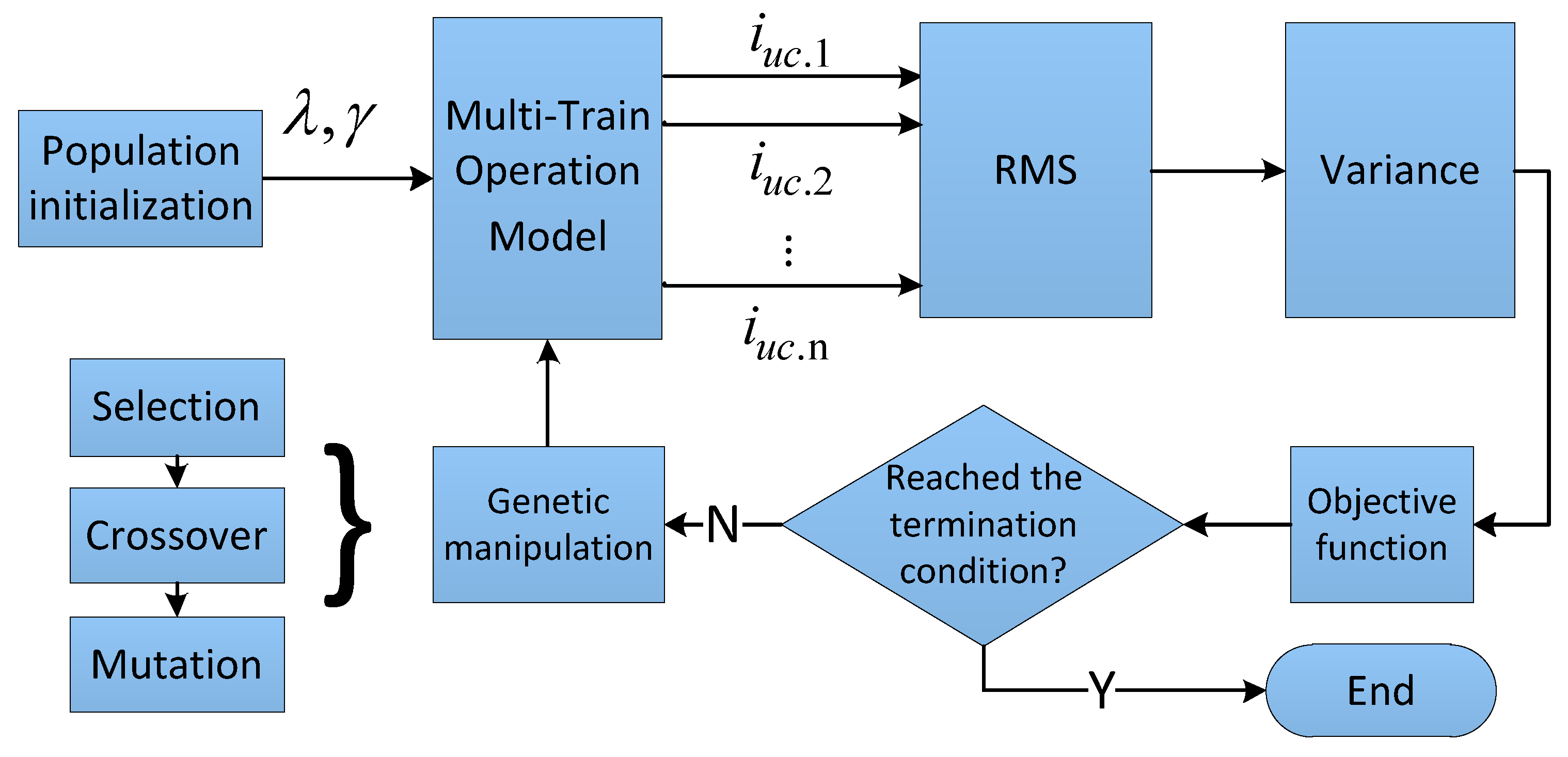
3. Controlling Parameters Optimization
3.1. Optimization Algorithm
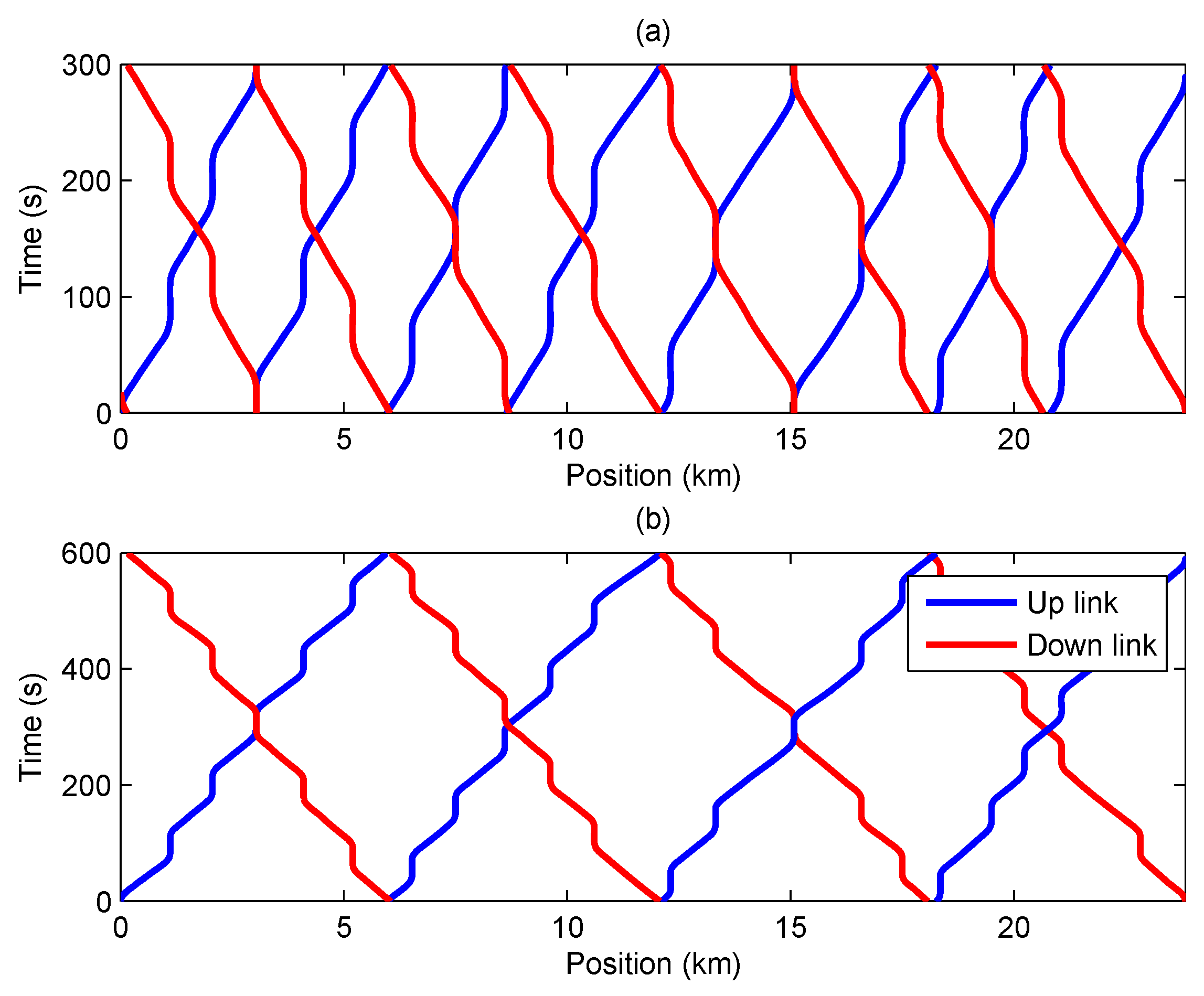
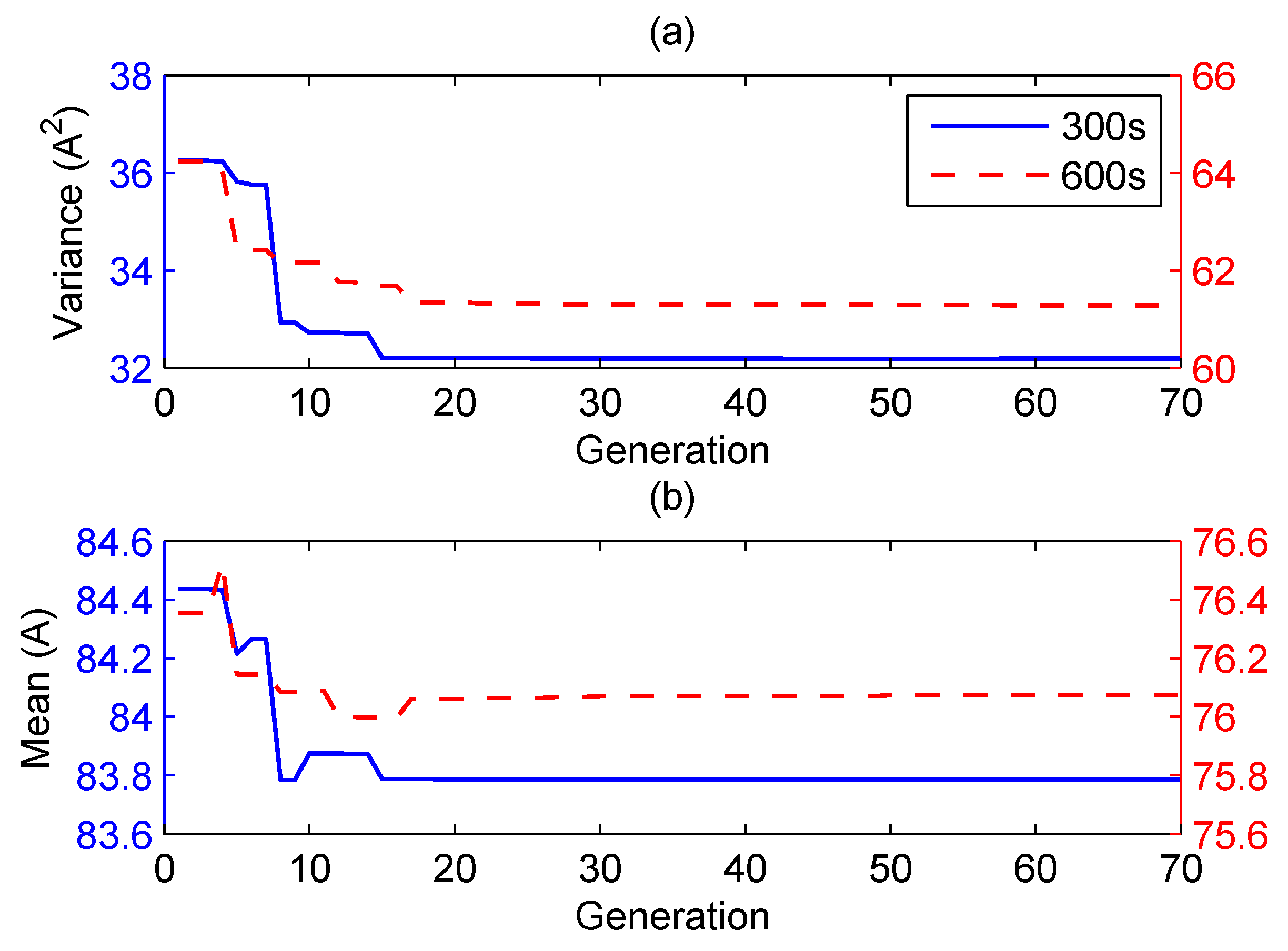
3.2. Case Study
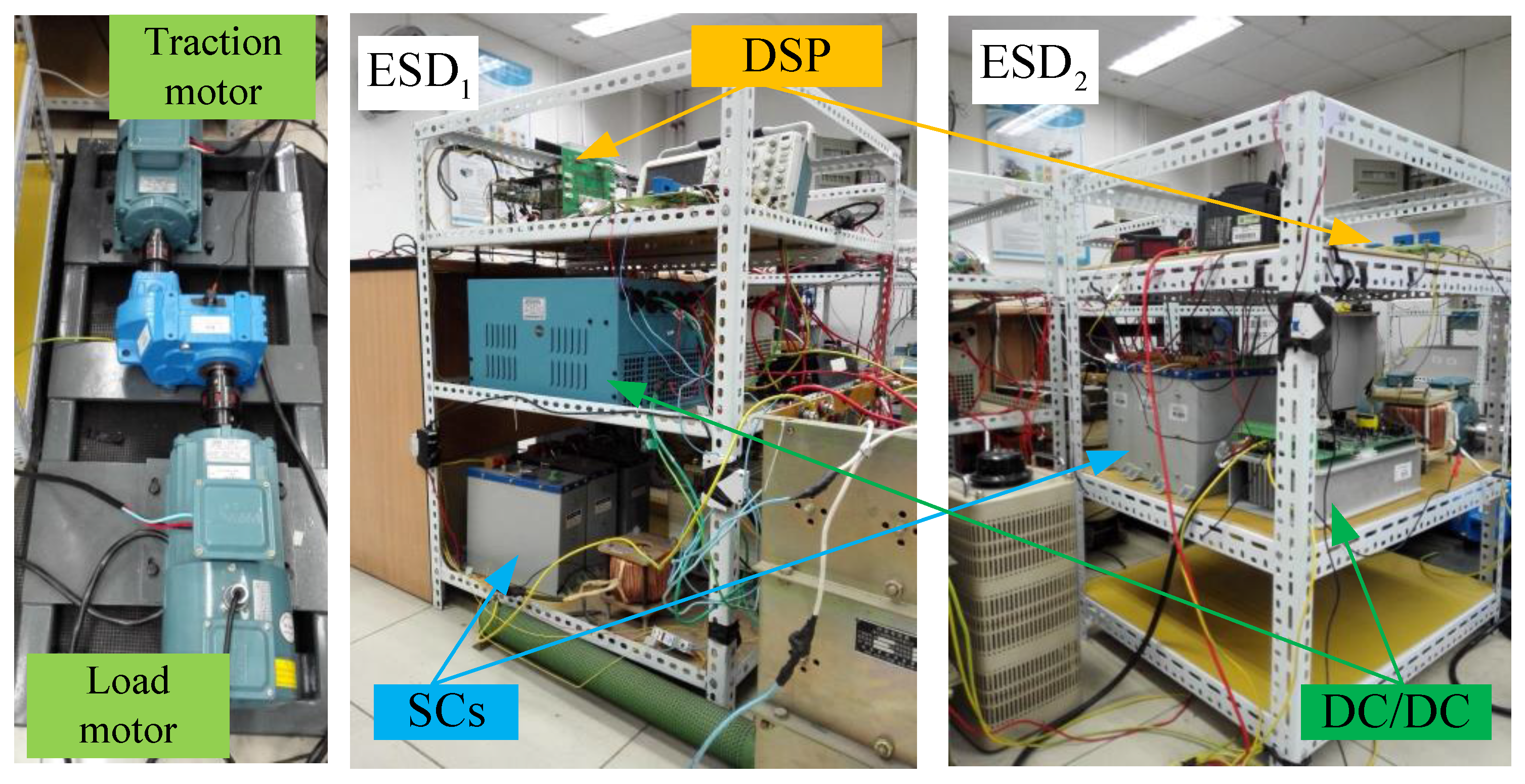
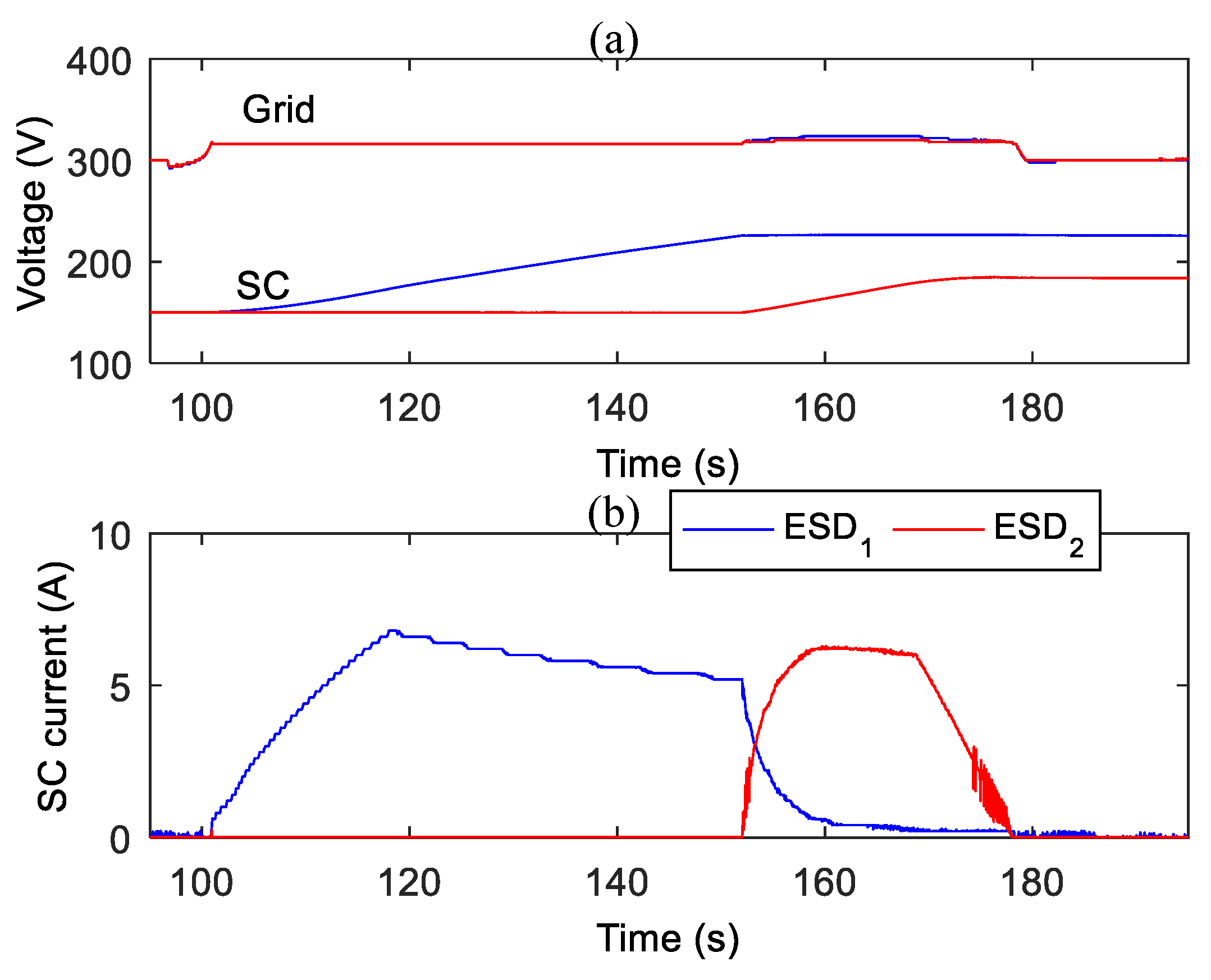
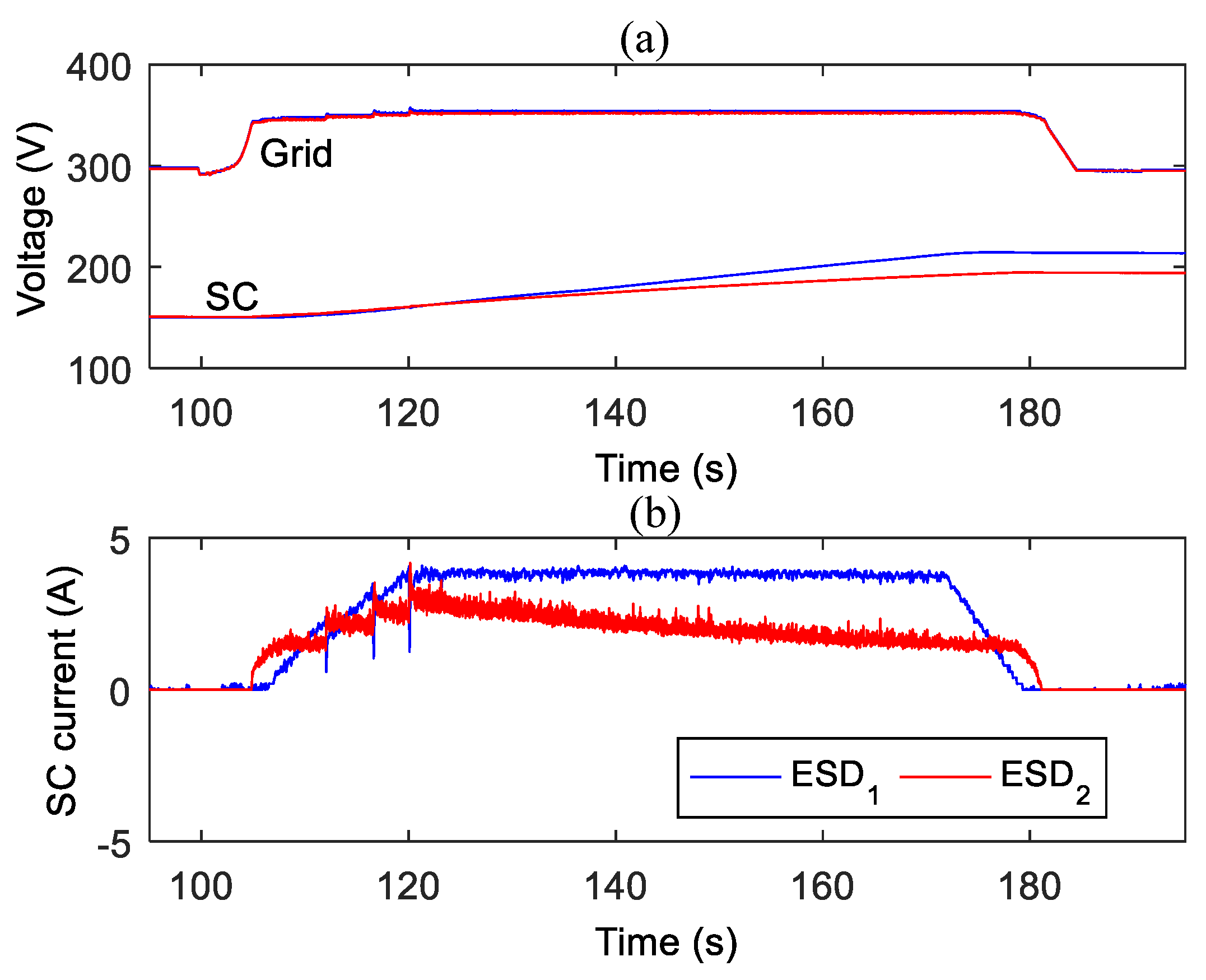
4. Experimental Verification
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ibrahim, H.; Ilinca, A.; Perron, J. Energy storage systems—Characteristics and comparisons. Renew. Sustain. Energy Rev. 2008, 12, 1221–1250. [Google Scholar] [CrossRef]
- Ratniyomchai, T.; Hillmansen, S.; Tricoli, P. Recent developments and applications of energy storage devices in electrified railways. IET Electr. Syst. Transp. 2014, 4, 9–20. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, ultracapacitor, fuel cell, and hybrid energy storage systems for electric, hybrid electric, fuel cell, and plug-in hybrid electric vehicles: State of the art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Ye, C.; Miao, S.; Lei, Q.; Li, Y. Dynamic energy management of hybrid energy storage systems with a hierarchical structure. Energies 2016, 9, 395. [Google Scholar] [CrossRef]
- Minakshi, M.; Meyrick, D.; Appadoo, D. Maricite (NaMn1/3Ni1/3Co1/3PO4)/activated carbon: Hybrid capacitor. Energy Fuels 2013, 27, 3516–3522. [Google Scholar] [CrossRef]
- Manickam, M. Lithium-free transition metal phosphate cathode for Li secondary batteries. J. Power Sources 2003, 113, 179–183. [Google Scholar] [CrossRef]
- Zhu, Y.; Murali, S.; Stoller, M.D.; Ganesh, K.J.; Cai, W.; Ferreira, P.J.; Pirkle, A.; Wallace, R.M.; Cychosz, K.A.; Thommes, M.; et al. Carbon-based supercapacitors produced by activation of graphene. Science 2011, 332, 1537–1541. [Google Scholar] [CrossRef] [PubMed]
- Lang, X.; Hirata, A.; Fujita, T.; Chen, M. Nanoporous metal/oxide hybrid electrodes for electrochemical supercapacitors. Nat. Nanotechnol. 2011, 6, 232–236. [Google Scholar] [CrossRef] [PubMed]
- Steiner, M.; Scholten, J. Energy storage on board of railway vehicles. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Rufer, A.; Barrade, P.; Hotellier, D. Power-electronic interface for a supercapacitor-based energy-storage substation in DC-transportation networks. EPE J. 2004, 14, 43–49. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Lauria, D.; Tricoli, P. Optimal design of stationary supercapacitors storage devices for light electrical transportation systems. Optim. Eng. 2012, 13, 689–704. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Pagano, E.; Tricoli, P. The use of energy storage systems for supporting the voltage needs of urban and suburban railway contact lines. Energies 2013, 6, 1802–1820. [Google Scholar] [CrossRef]
- Barrero, R.; Tackoen, X.; Van Mierlo, J. Stationary or onboard energy storage systems for energy consumption reduction in a metro network. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 207–225. [Google Scholar] [CrossRef]
- Ciccarelli, F.; Iannuzzi, D.; Spina, I. Comparison of energy management control strategy based on wayside ESS for LRV application. Proceedings of IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Teymourfar, R.; Asaei, B.; Iman-Eini, H. Stationary super-capacitor energy storage system to save regenerative braking energy in a metro line. Energy Convers. Manag. 2012, 56, 206–214. [Google Scholar] [CrossRef]
- Serna-Garcés, S.I.; Gonzalez Montoya, D.; Ramos-Paja, C.A. Sliding-mode control of a charger/discharger DC/DC converter for DC-bus regulation in renewable power systems. Energies 2016, 9, 245. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Tricoli, P. Speed-based state-of-charge tracking control for metro trains with onboard supercapacitors. IEEE Trans. Power Electron. 2012, 27, 2129–2140. [Google Scholar] [CrossRef]
- Ciccarelli, F.; Iannuzzi, D.; Tricoli, P. Control of metro-trains equipped with onboard supercapacitors for energy saving and reduction of power peak demand. Transp. Res. Part C Emerg. Technol. 2012, 24, 36–49. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Ciccarelli, F.; Lauria, D. Stationary ultracapacitors storage device for improving energy saving and voltage profile of light transportation networks. Transp. Res. Part C Emerg. Technol. 2012, 21, 321–337. [Google Scholar] [CrossRef]
- Ciccarelli, F.; Del Pizzo, A.; Iannuzzi, D. Improvement of energy efficiency in light railway vehicles based on power management control of wayside lithium-ion capacitor storage. IEEE Trans. Power Electron. 2014, 29, 275–286. [Google Scholar] [CrossRef]
- Barrero, R.; Tackoen, X.; Van Mierlo, J. Improving energy efficiency in public transport: Stationary supercapacitor based energy storage systems for a metro network. In Proceedings of the Vehicle Power and Propulsion Conference (VPPC’08), Harbin, China, 3–5 September 2008. [Google Scholar]
- Grbović, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. Modeling and control of the ultracapacitor-based regenerative controlled electric drives. IEEE Trans. Ind. Electron. 2011, 58, 3471–3484. [Google Scholar] [CrossRef]
- Lin, F.; Li, X.; Zhao, Y.; Yang, Z. Control strategies with dynamic threshold adjustment for supercapacitor energy storage system considering the train and substation characteristics in urban rail transit. Energies 2016, 9, 257. [Google Scholar] [CrossRef]
- Cao, J.; Emadi, A. A new battery/ultracapacitor hybrid energy storage system for electric, hybrid, and plug-in hybrid electric vehicles. IEEE Trans. Power Electron. 2012, 27, 122–132. [Google Scholar]
- Arabali, A.; Ghofrani, M.; Etezadi-Amoli, M.; Fadali, M.S.; Baghzouz, Y. Genetic-algorithm-based optimization approach for energy management. IEEE Trans. Power Deliv. 2013, 28, 162–170. [Google Scholar] [CrossRef]
- Carapellucci, R.; Giordano, L. Modeling and optimization of an energy generation island based on renewable technologies and hydrogen storage systems. Int. J. Hydrogen Energy 2012, 37, 2081–2093. [Google Scholar] [CrossRef]
- Ismail, M.; Moghavvemi, M.; Mahlia, T. Characterization of PV panel and global optimization of its model parameters using genetic algorithm. Energy Convers. Manag. 2013, 73, 10–25. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | ||
|---|---|---|---|
| 0 | 0.02 | ||
| 0 | 0.025 | ||
| Voltage of SC (V) | 559.6 | 492.1 | |
| 570.6 | 475.8 | ||
| 312.5 | 435.3 | ||
| 312.5 | 416.9 | ||
| RMS current of SC (A) | 2230.3 | 1596.9 | |
| 2282.7 | 1445.4 | ||
| 0 | 1083.5 | ||
| 0 | 919.4 | ||
| Parameters | Value |
|---|---|
| Population size | 24 |
| Genetic algebra | 70 |
| Individual length | 20 |
| Generation gap | 0.95 |
| Crossover probability | 0.7 |
| Mutation probability | 0.01 |
| 0 to 0.8 | |
| 0 to 0.08 |
| Parameters | Value | |
|---|---|---|
| Headway (s) | 300 | 600 |
| Minimum variance in CTCS (A) | 441.4 | 106.3 |
| Optimal variance (A) | 32.19 | 61.29 |
| Optimal mean value (A) | 83.79 | 76.07 |
| 0.3342 | 0.0236 | |
| 0.3353 | 0.0208 | |
| Parameters | Value | Unit |
|---|---|---|
| Capacitance of SC | 3.2 | F |
| Nominal voltage of SC | 270 | V |
| Series resistance of SC | 0.84 | |
| Initial voltage of SC | 150 | V |
| No load voltage | 300 | V |
| Switch frequency | 5 | kHz |
| Inductance of filter inductor | 7.5 | mH |
| Line impedance | 1 |
| Control Strategy | Variance (A) | Mean Value (A) |
|---|---|---|
| CTCS | 1.402 | 2.043 |
| SCSCS | 0.4075 | 1.963 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Yang, Z.; Xia, H.; Lin, F.; Zhu, F. Supercapacitor State Based Control and Optimization for Multiple Energy Storage Devices Considering Current Balance in Urban Rail Transit. Energies 2017, 10, 520. https://doi.org/10.3390/en10040520
Yang Z, Yang Z, Xia H, Lin F, Zhu F. Supercapacitor State Based Control and Optimization for Multiple Energy Storage Devices Considering Current Balance in Urban Rail Transit. Energies. 2017; 10(4):520. https://doi.org/10.3390/en10040520
Chicago/Turabian StyleYang, Zhongping, Zhihong Yang, Huan Xia, Fei Lin, and Feiqin Zhu. 2017. "Supercapacitor State Based Control and Optimization for Multiple Energy Storage Devices Considering Current Balance in Urban Rail Transit" Energies 10, no. 4: 520. https://doi.org/10.3390/en10040520
APA StyleYang, Z., Yang, Z., Xia, H., Lin, F., & Zhu, F. (2017). Supercapacitor State Based Control and Optimization for Multiple Energy Storage Devices Considering Current Balance in Urban Rail Transit. Energies, 10(4), 520. https://doi.org/10.3390/en10040520