
Modeling and Analysis of a DC Electrical System and Controllers for Implementation of a Grid-Interactive Building

Abstract
:1. Introduction
- Unlike the previous papers [16,17,18,19,20,21,22,23,24,25], this paper has comprehensively modeled a DC electrical system for use in a commercial building, where the PEVs, PV systems, and DC loads are coordinated to improve the electricity grid operation under various conditions, characterized by the physical characteristics of the DC components.
- Compared to the building system in [27], the proposed electrical system has the advantages of: (1) directly charging PEV batteries with PV output power, which results in a decrease in power conversion loss; (2) reducing the requirements of communications systems between an ISO and individual PEV owners; and (3) easily including additional DC sources, ESRs, and loads.
- Few papers have included building-level controllers for the input power control of PEV chargers. In this paper, the coordination of the building- and device-level controllers, including the PEV charger controllers, has been developed such that the commercial building can act as an intermediate aggregator between an ISO and multiple PEV owners and, consequently, operate as a large-scale stationary ESR, particularly from the viewpoint of the ISO. The coordination also enables the building electrical system to effectively hide the rooftop PV power fluctuation from the ISO.
- The new control scheme of PEV chargers has been developed in this paper. The controller enables the power input of the building electrical system to successfully follow the reference input while not leading to the overvoltages of PEV batteries. In addition, even when PEV battery voltages are close to the maximum limits, the control scheme enables the power input to gradually change from the reference input, which prevents sudden variations in the power outputs of conventional generators.
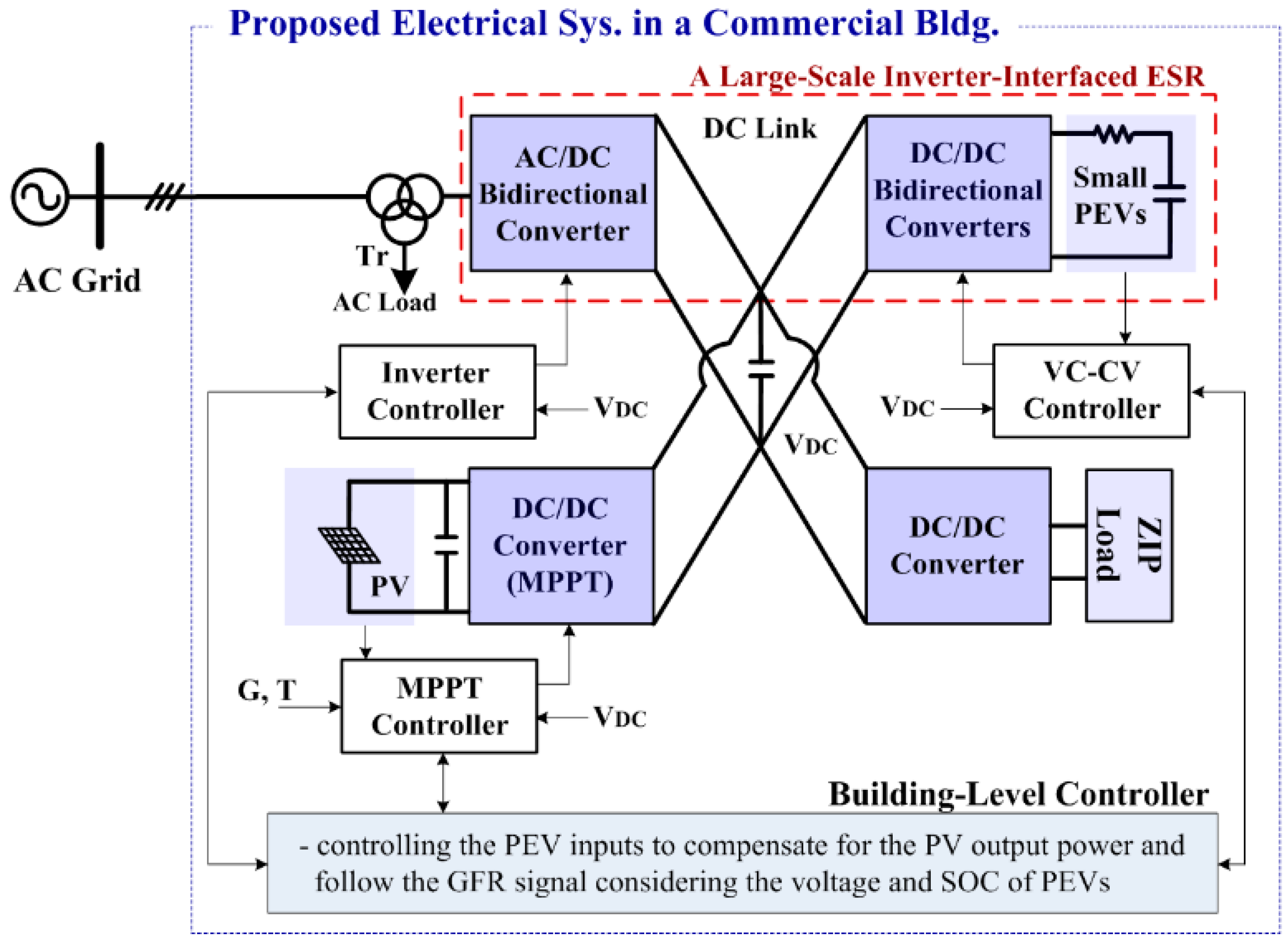
2. Modeling of the Proposed DC Electrical System in a Commercial Building
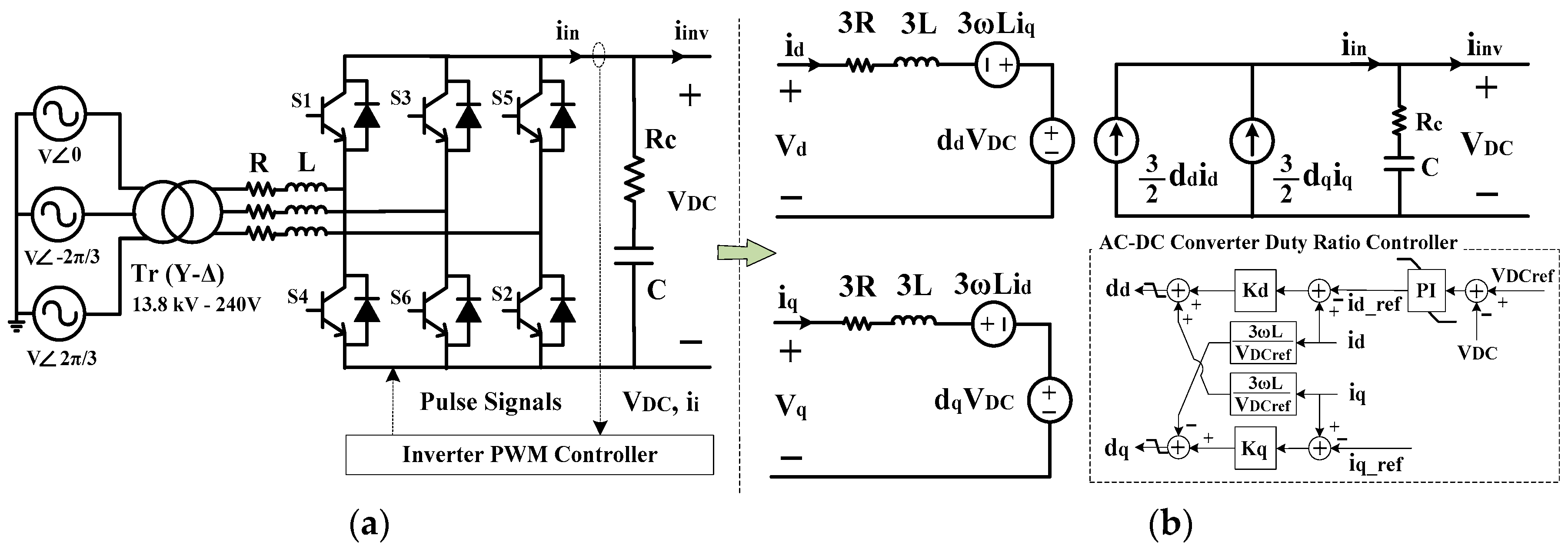
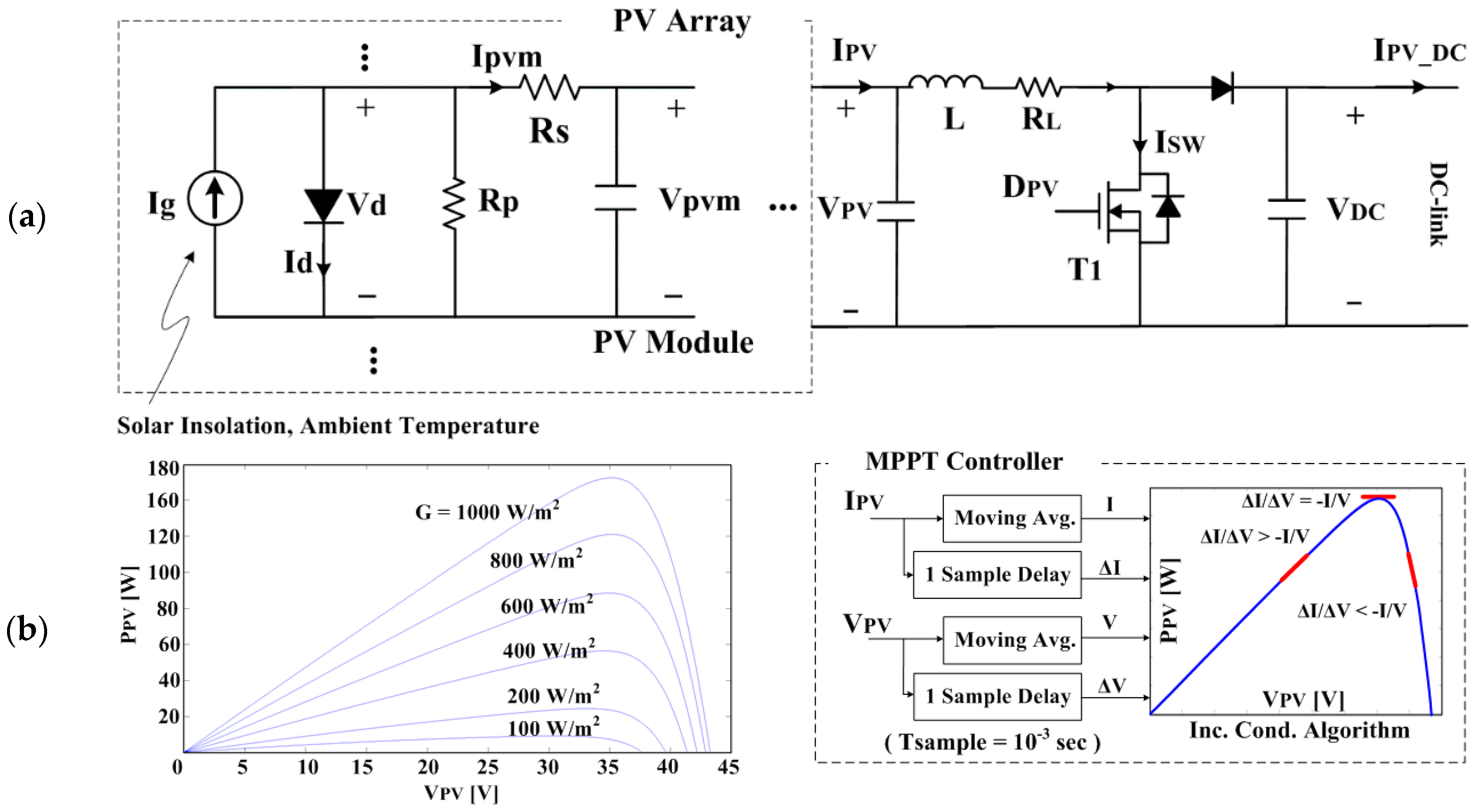
2.1. AC-DC Bidirectional Converter and Rooftop PV System
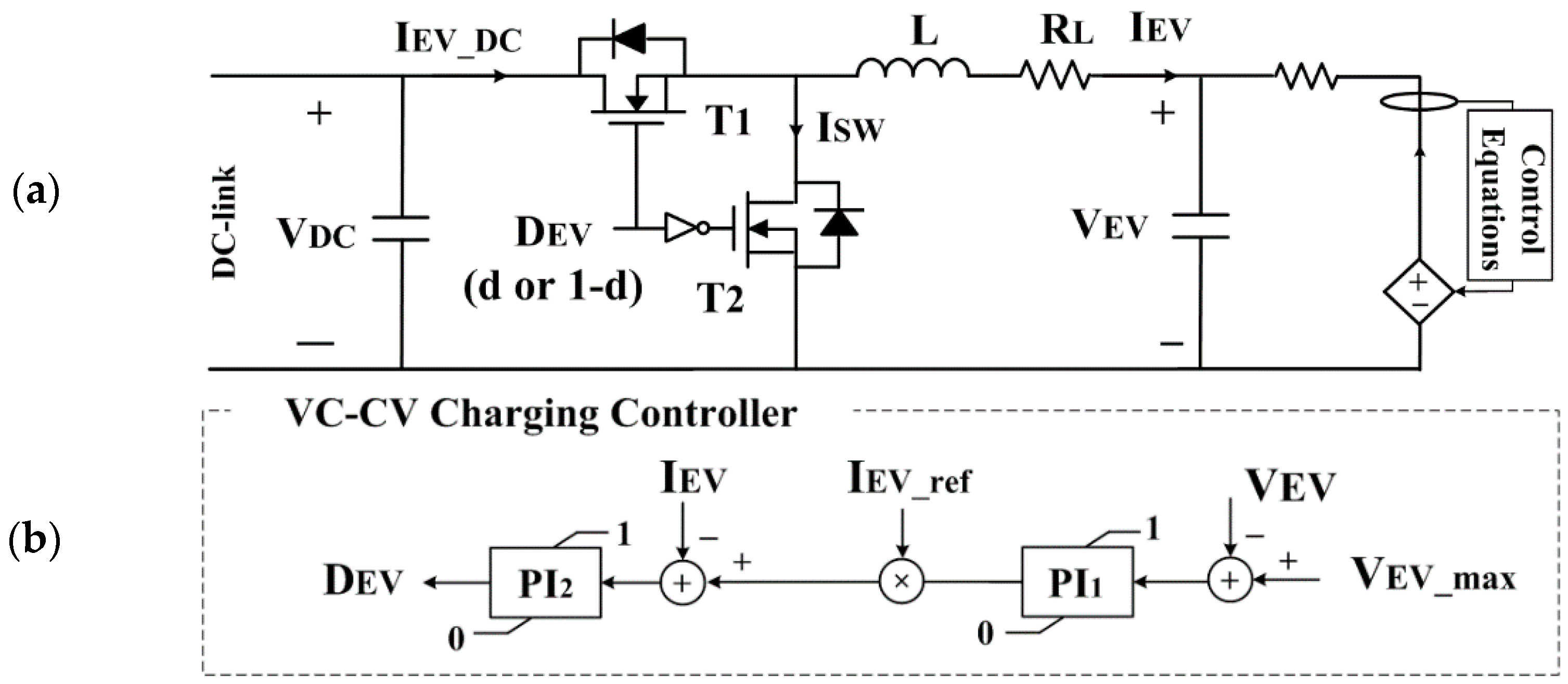
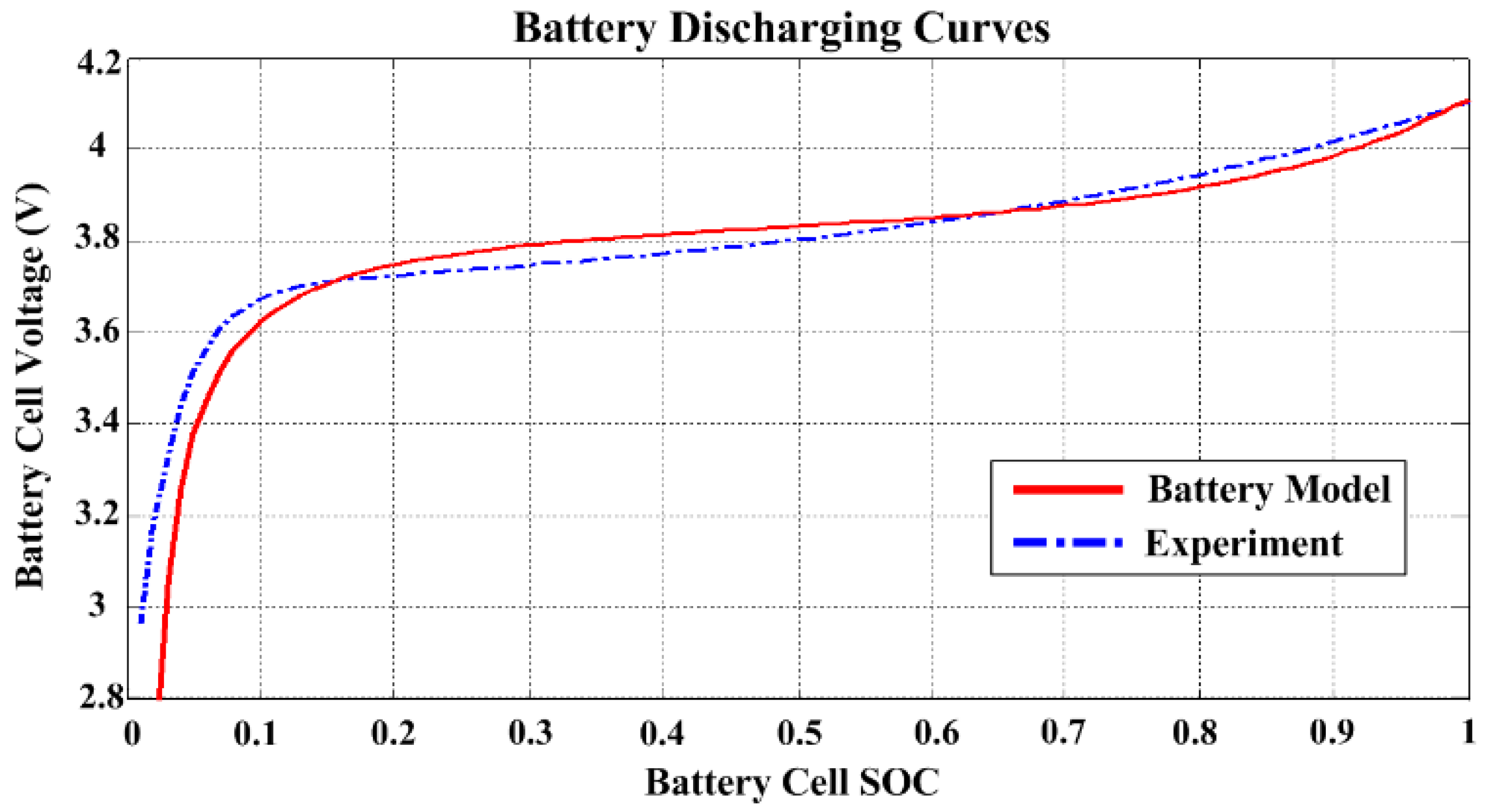
2.2. PEV Battery and DC-DC Buckboost Converte
- (a)
- Discharging (IEV ≤ 0)
- (b)
- Charging (IEV > 0)where
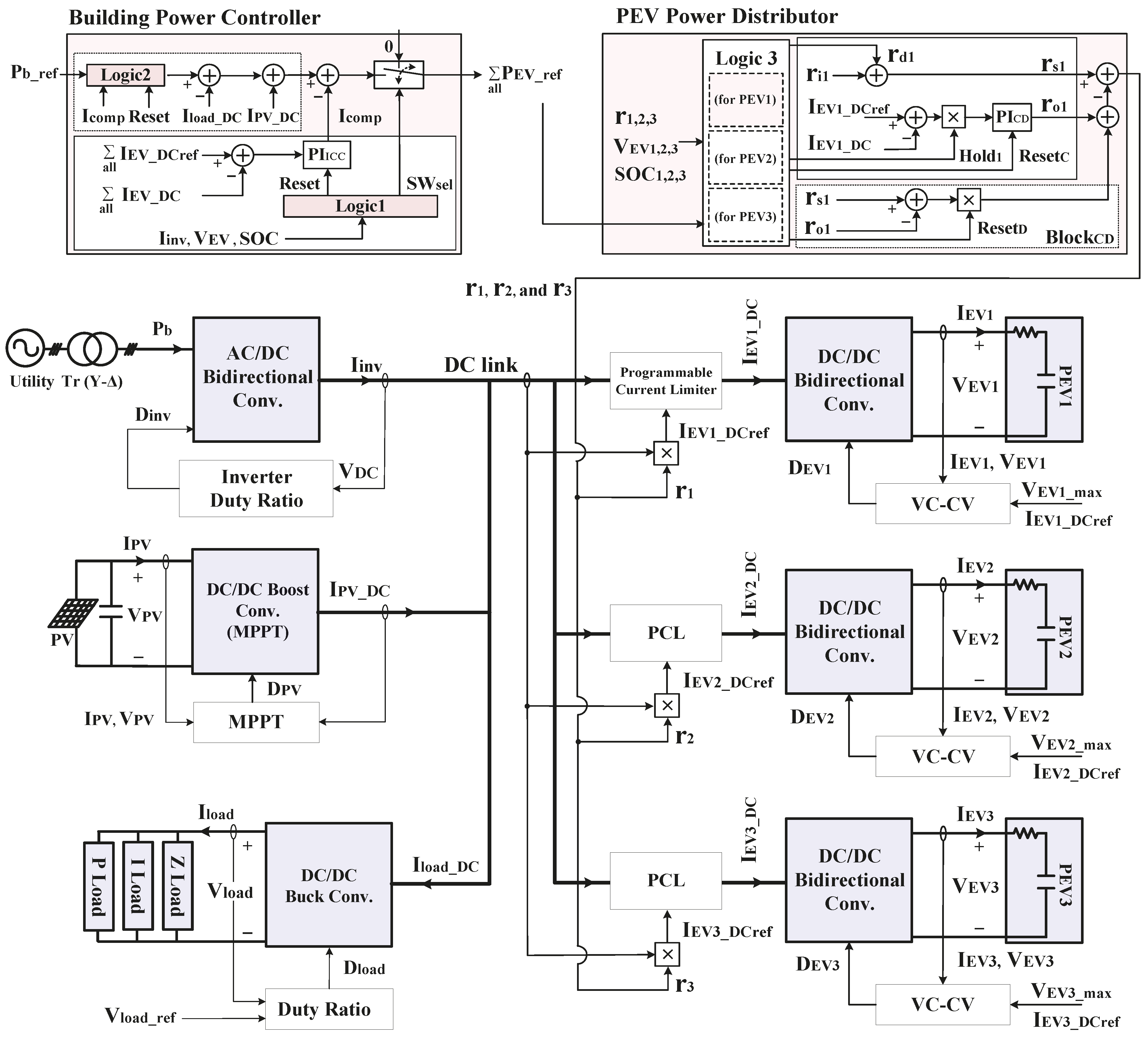
3. Coordination between Building- and Device-Level Controllers
3.1. Building Power Controller (BPC) and PEV Power Distributor (PPD)
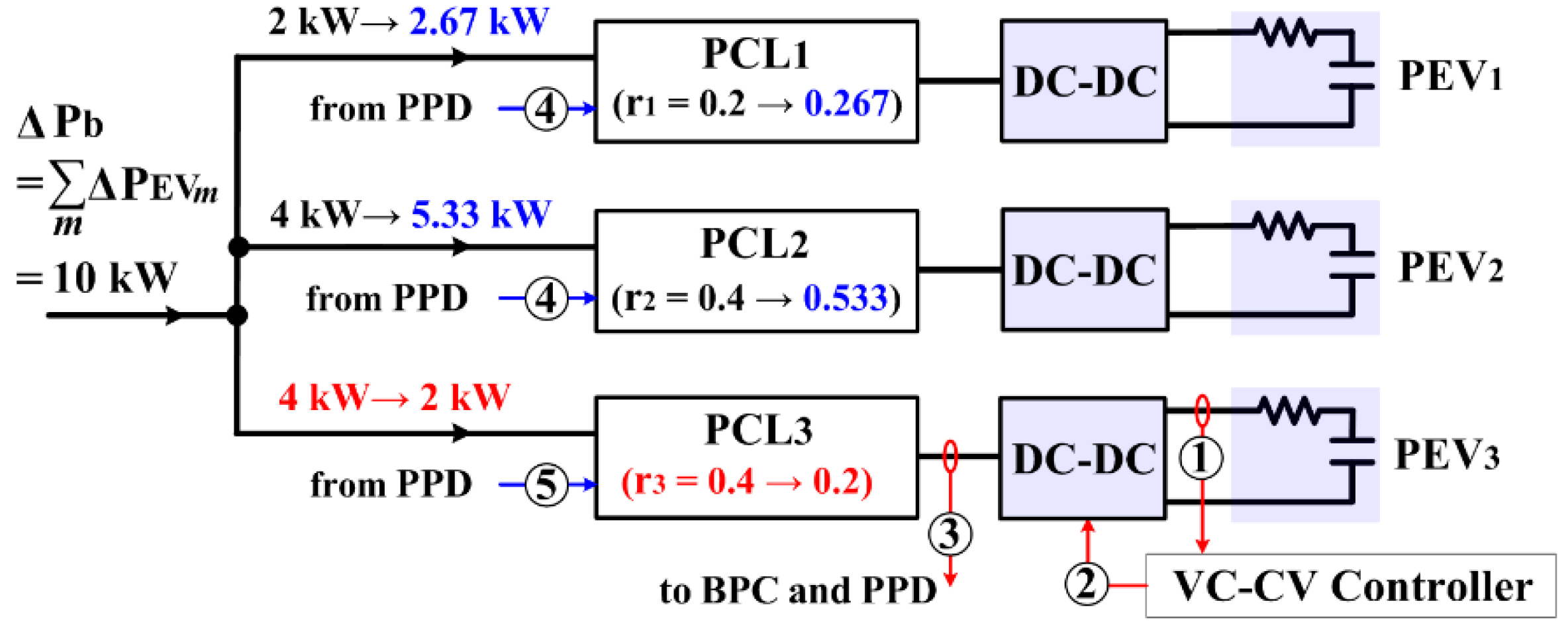
3.2. Overall Operation of the Proposed DC Electrical System in a Commercial Building
4. Simulation Case Studies and Results
4.1. Case 1: Charging PEV batteries with constant Pb_ref for PPV = 0
4.2. Case 2: Sequential Changes in Pb_ref wiht Intermittent PPV
4.3. Case 3: Discharging PEVs Batteries to SOCmin
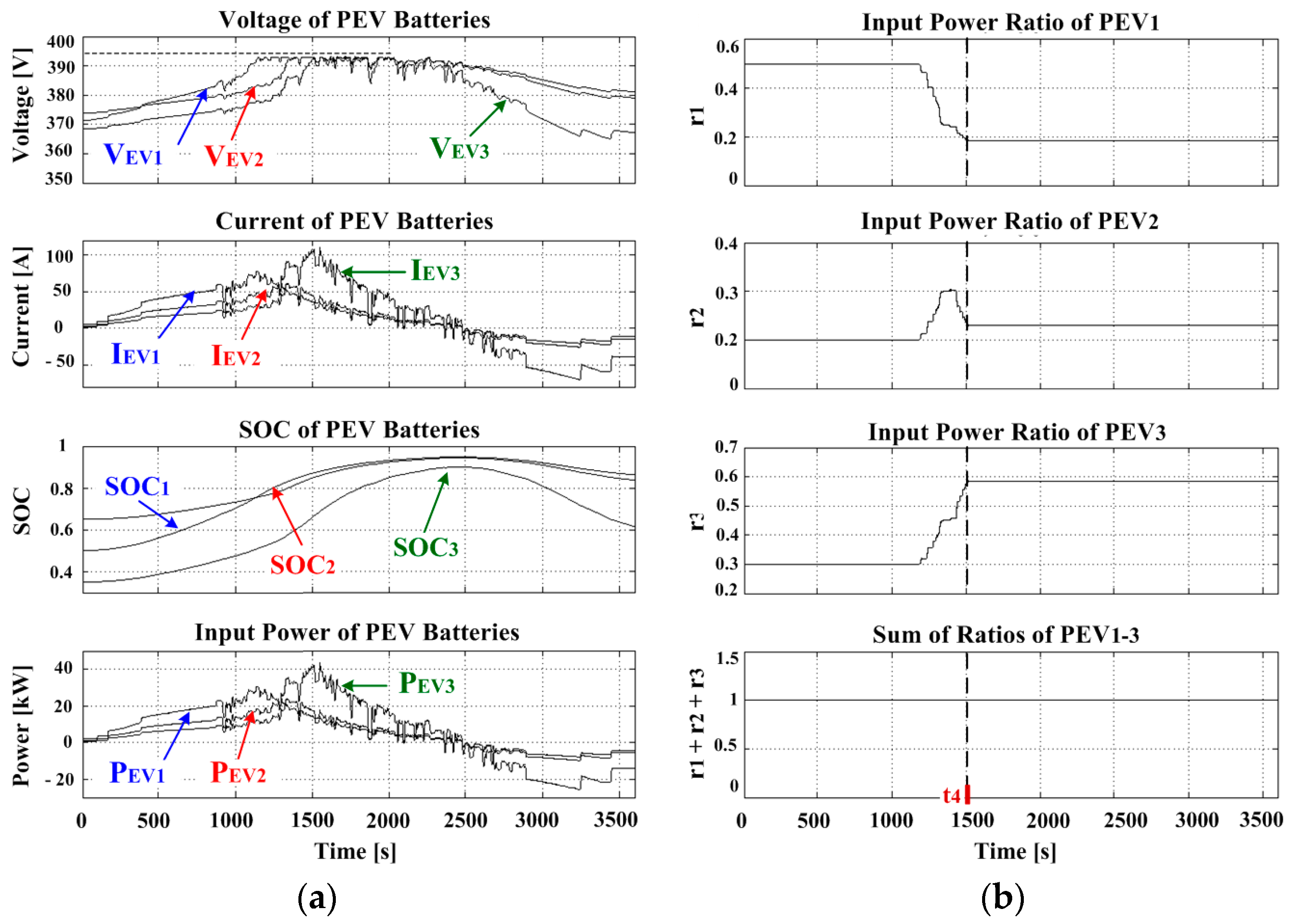
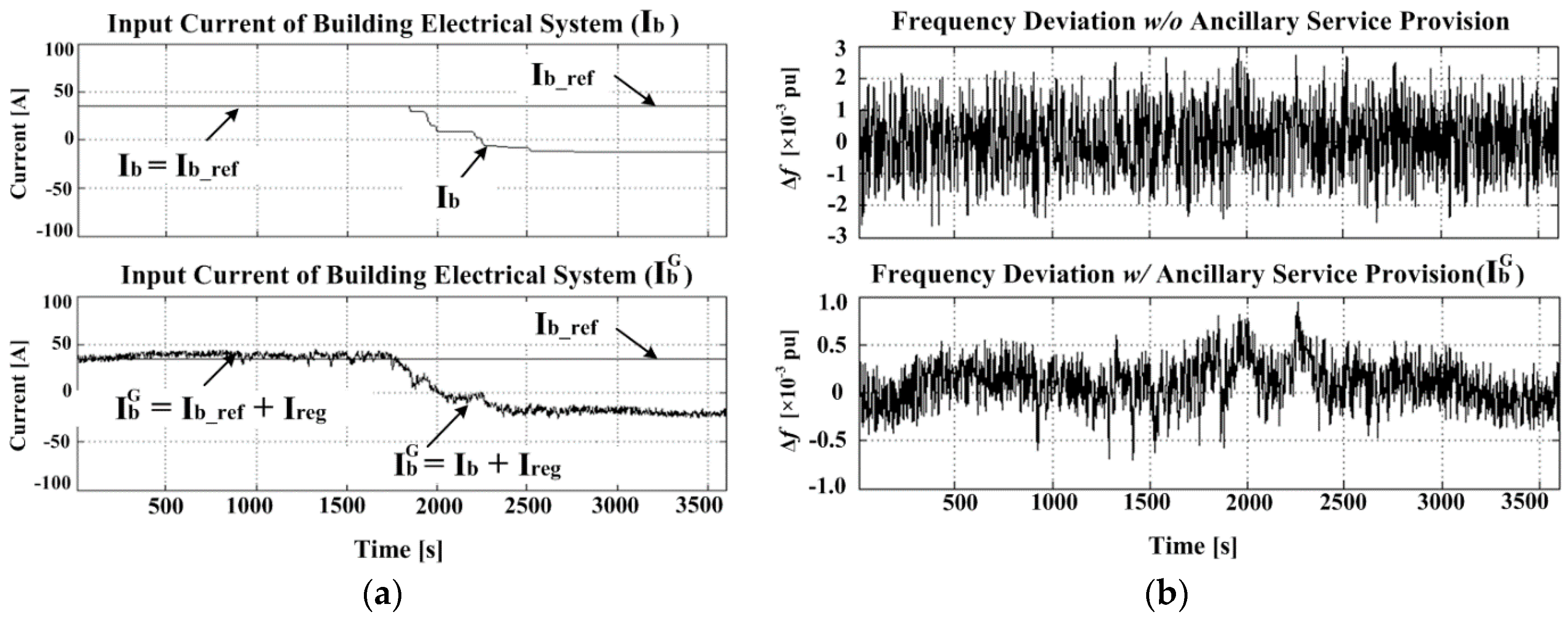
4.4. Case 4: Adding the Time-Varying GFR Signal Preg to Pb_ref
5. Conclusions
Acknowledgments
Conflicts of Interest
Abbreviations
| BEMS | Building energy management system |
| BMS | Building management system |
| BPC | Building power controller |
| CC-CV | Constant-current and constant-voltage |
| DER | Distributed energy resource |
| ESR | Energy storage resource |
| GFR | Grid frequency regulation |
| IC | Incremental conductance |
| ISO | Independent system operator |
| MPPT | Maximum power point tracking |
| PCC | Point of common coupling |
| PCL | Programmable current limiter |
| PEV | Plug-in electric vehicle |
| PLL | Phase-locked loop |
| PPD | PEV power distributor |
| PV | Photovoltaic |
| RES | Renewable energy source |
| SOC | State of charge |
| VC-CV | Variable-current and constant-voltage |
| V2G | Vehicle-to-grid |
| Set | |
| ref, rated, loss, max, min | Subscript for reference, rated, loss, maximum, and minimum values |
| AC-DC Bidirectional Converter | |
| vd, vq | dq-axis voltages converted from the three-phase voltages (i.e., va, vb, and vc) at the input port of the inverter |
| id, iq | dq-axis input currents of the inverter |
| dd, dq | dq-axis duty ratios of the inverter |
| Kd, Kq | dq-axis duty ratio constants (set to 0.2) |
| vα, vβ | αβ-axis voltages converted from va, vb, and vc using Clarke Transform |
| f, ω | Frequency [Hz, rad/s] of va, vb, and vc |
| V | RMS magnitude of va, vb, and vc |
| θda | Angle by which d-axis leads the phase-a axis |
| VDC | DC link voltage of the inverter |
| vc | Voltage across the equivalent capacitance in the DC link of the inverter |
| R, L | Equivalent line resistance and inductance seen from the inverter |
| Rc, C | Equivalent resistance and capacitance of the DC link of the inverter |
| s1-6 | Inverter switching signals |
| iin, iinv | Currents flowing into and from the DC link of the inverter |
| Qinv | Reactive power input of the inverter |
| Sinv_rated | Rated capacity of the inverter |
| Rooftop PV System | |
| Ipvm, Vpvm, Ppvm | Output current, voltage, and power of the PV module |
| Ns, Np | Number of modules in series- and parallel-wired strings |
| IPV, VPV, PPV | Output current, voltage, and power of the PV system |
| Rp, Rs | Equivalent parallel and serial resistances of the PV module |
| G, T | Insolation given to the PV module and temperature of the PV module |
| Vd, Id | Voltage across and current flowing through the diode in the PV module |
| Ig, Io | Generated PV module current and reverse saturation current |
| L, RL | Equivalent inductance and resistance of the PV converter |
| DPV | Duty ratio of the PV converter |
| ISW, IPV_DC | Currents flowing through the switch and to the DC link |
| Iscr, Vocr | Nominal short-circuit current and open-circuit voltage |
| q | Charge of an electron, 1.602 × 10−19 C |
| k | Botzmann’s constant, 1.381 × 10−23 |
| a | Ideality factor, 1.3 |
| Eg | Bandgap energy of semiconductor (1.12 eV for the polycrystalline Si at 25 °C) |
| kI | Current coefficient (0.0032 A/K) |
| εV, εI | Voltage and current tolerance for the duty ratio control using the IC algorithm |
| PEV Battery Charger | |
| IEV, VEV, PEV | Input current, voltage, and power of the PEV battery |
| DEV (d or 1-d) | Duty ratio of the PEV charger |
| ISW, IEV_DC | Currents flowing through the switch and from the DC link |
| L, RL | Equivalent inductance and resistance of the PEV charger |
| R | Equivalent internal resistance of the PEV battery |
| Vo | Constant voltage of the PEV battery |
| Qrated | Rated capacity of the PEV battery |
| k | Polarization constant |
| A, B | Exponential zone amplitude and time constant |
| SOCinit | Initial SOC level of the PEV battery |
| Building Electrical System | |
| Pb, Ib | Input power and current of the building electrical system |
| td | Desired charging end-time |
| rm | Ratio of the input power of the m-th PEV to the total charging power |
| rdm | Incremental ratios of rm |
| Vload, Iload, Pload | Input voltage, current, and power of the DC loads |
| Dload | Duty ratio of the DC converter for the DC loads |
| Psur | Surplus power in the DC electrical system |
| M | The number of the PEVs that make the contract to be used as grid-interactive ESRs |
| m, n | Indices of the PEVs M |
| L | The number of the PEVs that are available for grid-interactive ESRs |
| j, k | Indices of the PEVs L and (M-L) |
| SWsel, Reset | Command signals for internal operations of the BPC |
| ResetC, ResetD, Holdm | Command signals for internal operations of the PPD |
| Preg, Ireg | Input power and current of the building for the ancillary service provision |
| IbG | Total input current of the building considering the ancillary service provision |
| Δf | Grid frequency deviation |
References
- Bevrani, H.; Ghosh, A.; Ledwich, G. Renewable energy sources and frequency regulation: Survey and new perspectives. IET Renew. Power Gener. 2010, 4, 438–457. [Google Scholar] [CrossRef]
- Yan, R.; Saha, T.K. Investigation of voltage stability for residential customers due to high photovoltaic penetrations. IEEE Trans. Power Syst. 2012, 27, 651–662. [Google Scholar] [CrossRef]
- Cvetkovic, I. Modeling, Analysis and Design of Renewable Energy Nanogrid Systems. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, July 2010. [Google Scholar]
- Coddington, M.; Kroposki, B.; Basso, T.; Lynn, K.; Sammon, D.; Vaziri, M.; Yohn, T. Photovoltaic Systems Interconnected onto Secondary Network Distribution Systems—Success Stories; NREL/TP-550-45061; National Renewable Energy Laboratory: Golden, CO, USA, April 2009.
- Kim, Y.-J.; Hwang, P.-I.; Moon, S.I. A steady-state analysis for an inverter-based DG to determine the optimal capacity of an inverter and harmonic filters. J. Int. Counc. Electr. Eng. 2011, 1, 14–20. [Google Scholar] [CrossRef]
- Kim, Y.; Kirtley, J.L.; Norford, L.K. Reactive power ancillary service of synchronous DGs in coordination with voltage control devices. IEEE Trans. Smart Grid 2017, 8, 515–527. [Google Scholar] [CrossRef]
- Hara, R.; Kita, H.; Tanabe, T.; Sugihara, H.; Kuwayama, A.; Miwa, S. Testing the technologies. IEEE Power Energy Mag. 2009, 7, 77–85. [Google Scholar] [CrossRef]
- Markel, T.; Smith, K.; Pesaran, A. PHEV energy storage performance/life/cost trade-off analysis. In Proceedings of the Advanced Automotive Battery Conference, Tampa, FL, USA, 15 May 2008. [Google Scholar]
- Galus, M.D.; Koch, S.; Andersson, G. Provision of load frequency control by PHEVs, controllable loads, and a cogeneration unit. IEEE Trans. Ind. Electron. 2011, 58, 4568–4582. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A. Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters. IEEE Trans. Smart Grid 2012, 3, 1253–1262. [Google Scholar] [CrossRef]
- Garbesi, K.; Vossos, V.; Sanstad, A.; Burch, G. Optimizing Energy Savings from Direct-DC in U.S. Residential Buildings; LBNL-5193E; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, July 2012.
- Denholm, P.; Margolis, R.M. Impacts of array configuration on land-use requirements for large-scale photovoltaic deployment in the United States. In Proceedings of the American Solar Energy Society Conference, San Diego, CA, USA, 3–8 May 2008. [Google Scholar]
- Garbesi, K.; Vossos, V.; Shen, H. Catalog of DC Appliances and Power Systems; LBNL-5364E; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2011.
- Dickerman, L.; Harrison, J. A new car, a new grid. IEEE Power Energy Mag. 2010, 8, 55–61. [Google Scholar] [CrossRef]
- Wolf, K.L. Trees, Parking and Green Law: Strategies for Sustainability. Georgia Forestry Commission, 2004. Available online: http://www.naturewithin.info/Roadside/Trees_Parking_Green%20Law.pdf (accessed on 7 February 2017).
- Almeida, P.M.R.; Lopes, J.A.P.; Soares, F.J.; Seca, L. Electric vehicles participating in frequency control: Operating islanded systems with large penetration of renewable power sources. In Proceedings of the IEEE PowerTech Conference, Trondheim, Norway, 19–23 June 2011; pp. 1–6. [Google Scholar]
- Pillai, J.R.; Bak-Jensen, B. Vehicle-to-grid for islanded power system operation in Bornholm. In Proceedings of the IEEE Power & Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8. [Google Scholar]
- Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P. An aggregate model of plug-in electric vehicles for primary frequency control. IEEE Trans. Power Syst. 2015, 30, 1475–1482. [Google Scholar] [CrossRef]
- Mu, Y.; Wu, J.; Ekanayake, J.; Jenkins, N.; Jia, H. Primary frequency response from electric vehicles in the Great Britain power system. IEEE Trans. Smart Grid 2013, 4, 1142–1150. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Lin, J. Decentralized vehicle-to-grid control for primary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-grid for supplementary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2015, 30, 3110–3119. [Google Scholar] [CrossRef]
- Ota, Y.; Taniguchi, H.; Nakajima, T.; Liyanage, K.M.; Baba, J.; Yokoyama, A. Autonomous distributed V2G(vehicle-to-grid) satisfying scheduled charging. IEEE Trans. Smart Grid 2012, 3, 559–564. [Google Scholar] [CrossRef]
- Hamid, Q.R.; Barria, J.A. Distributed recharging rate control for energy demand management of electric vehicles. IEEE Trans. Power Syst. 2013, 28, 2688–2699. [Google Scholar] [CrossRef]
- Datta, M.; Senjyu, T. Fuzzy control of distributed PV inverters/energy storage systems/electric vehicles for frequency regulation in a large power system. IEEE Trans. Smart Grid 2013, 4, 479–488. [Google Scholar] [CrossRef]
- Yang, H.; Chung, C.Y.; Zhao, J. Application of plug-in electric vehicles to frequency regulation based on distributed signal acquisition via limited communication. IEEE Trans. Power Syst. 2013, 28, 1017–1026. [Google Scholar] [CrossRef]
- Ma, R.; Chen, H.H.; Huang, Y.R.; Meng, W. Smart grid communication: Its challenges and opportunities. IEEE Trans. Smart Grid 2013, 4, 36–46. [Google Scholar] [CrossRef]
- Kempton, W.; Tomic, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Xu, Z.; Guan, X.; Jia, Q.S.; Wu, J.; Wang, D.; Chen, S. Performance analysis and comparison on energy storage devices for smart building energy management. IEEE Trans. Smart Grid 2012, 3, 2136–2147. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, L.; Fu, Y. Real-time price-based demand response management for residential appliances via stochastic optimization and robust optimization. IEEE Trans. Smart Grid 2012, 3, 1822–1831. [Google Scholar] [CrossRef]
- Du, P.; Lu, N. Appliance commitment for household load scheduling. IEEE Trans. Smart Grid 2011, 2, 411–419. [Google Scholar] [CrossRef]
- Angelis, F.; Boaro, M.; Fuselli, D.; Squartini, S.; Piazza, F.; Wei, Q. Optimal home energy management under dynamic electrical and thermal constraints. IEEE Trans. Ind. Inform. 2013, 9, 1518–1527. [Google Scholar] [CrossRef]
- Tasdighi, M.; Ghasemi, H.; Rahimi-Kian, A. Residential microgrid scheduling based on smart meter data and temperature dependent thermal load modeling. IEEE Trans. Smart Grid 2014, 5, 349–357. [Google Scholar] [CrossRef]
- Papadaskalopoulos, D.; Strbac, G.; Mancarella, P.; Aunedi, M.; Stanojevic, V. Decentralized participation of flexible demand in electricity markets—Part II: Application with electric vehicles and heat pump systems. IEEE Trans. Power Syst. 2013, 28, 3667–3674. [Google Scholar] [CrossRef]
- Fan, Z.; Kulkarni, P.; Gormus, S.; Efthymiou, C.; Kalogridis, G.; Sooriyabandara, M.; Zhu, Z.M.; Lambotharan, S.; Chin, W.H. Smart grid communications: Overview of research challenges, solutions, and standardization activities. IEEE Commun. Surv. Tutor. 2013, 15, 21–38. [Google Scholar] [CrossRef]
- Birman, K.P.; Chen, J.; Hopkinson, E.M.; Thomas, R.J.; Thorp, J.S.; Van Renesse, R.; Vogels, W. Overcoming communications challenges in software for monitoring and controlling power systems. Proc. IEEE 2005, 93, 1028–1041. [Google Scholar] [CrossRef]
- Pang, H.; Lo, E.; Pong, B. DC Electrical Distribution Systems in Buildings. In Proceedings of the 2nd International Conference on Power Electronics Systems and Applications, Hong Kong, China, 12–14 November 2006; pp. 115–119. [Google Scholar]
- Gonzalez-Longatt, F.; Rajpurohit, B.S.; Singh, S.N. Optimal structure of a smart DC micro-grid for a cluster of zero net energy buildings. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–7. [Google Scholar]
- Nemtzow, D.; Kampschroer, K.; Goldman, E.; Sofos, M. The Internet of Things (IOT) and Energy Management in the Modern Building. Better Buildings Summit. U.S. Department of Energy, 2016. Available online: https://betterbuildingssolutioncenter.energy.gov/sites/default/files/The-Internet-of-Things-and-Energy-Management-in-the-Modern-Building-High-Impact-Technologies-TUES.pdf (accessed on 11 March 2017).
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems, 2nd ed.; Wiley-Interscience: Piscataway, NJ, USA, 2002; pp. 513–520. [Google Scholar]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; Wiley-Interscience: Hoboken, NJ, USA, 2010; pp. 217–226. [Google Scholar]
- Datta, M.; Senjyu, T.; Yona, A.; Funabashi, T.; Kim, C.H. A frequency-control approach by photovoltaic generator in a PV-diesel hybrid power system. IEEE Trans. Energy Convers. 2012, 26, 559–571. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Filho, E.R. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design, 3rd ed.; John Wiley & Son: Hoboken, NJ, USA, 2003; pp. 161–178. [Google Scholar]
- Lee, J.H.; Bae, H.; Cho, B.H. Advanced incremental conductance MPPT algorithm with a variable step size. In Proceedings of the 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; pp. 603–607. [Google Scholar]
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I-V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A.; Dekkiche, A. I. A generic battery model for the dynamic simulation of hybrid electric vehicles. In Proceedings of the Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007. [Google Scholar]
- SAE Electric Vehicle and Plug-In Hybrid Electric Vehicle Conductive Charge Coupler (J1772); Society of Automotive Engineering (SAE) International: Warrendale, PA, USA, 2010; pp. 1–93.
- Kissel, G. SAE J1772™ Update for IEEE Standard 1809 Guide for Electric-Sourced Transportation Infrastructure Meeting. 2010. Available online: http://grouper.ieee.org/groups/earthobservationsSCC/IEEE_SAE_J1772_Update_10_02_08_Gery_Kissel.pdf (accessed on 11 March 2017).
- Morrow, K.; Karner, D.; Francfort, J. Plug-In Hybrid Electric Vehicle Charging Infrastructure Review; Battelle Energy Alliance, INL/EXT-08-15058; Idaho National Laboratory: Idaho Falls, ID, USA, 2008; pp. 1–40.
- Lee, J.H.; Moon, J.S.; Lee, Y.S.; Kim, Y.R.; Won, C.Y. Fast charging technique for EV battery charger using three-phase AC-DC boost converter. In Proceedings of the 37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 4577–4582. [Google Scholar]
- LTC4000. High Voltage High Current Controller for Battery Charging and Power Management. Linear Technology. Available online: http://cds.linear.com/docs/en/datasheet/4000fb.pdf (accessed on 7 February 2017).
- Hybrid and Electric Vehicle Solutions Guide. Texas Instruments. Available online: http://www.ti.com/lit/ml/szza058c/szza058c.pdf (accessed on 7 February 2017).
- Orion BMS Operation Manual Rev 2.1. Ewert Energy Systems. Available online: https://www.orionbms.com/manuals/pdf/operational_manual.pdf (accessed on 7 February 2017).
- Ahmad, M.W.; Mourshed, M.; Mundow, D.; Sisinni, M.; Rezgui, Y. Building energy metering and environmental monitoring—A state-of-the-art review and directions for future research. Energy Build. 2016, 120, 85–102. [Google Scholar] [CrossRef]
- Hong, I.; Byun, J.; Park, S. Cloud computing-based building energy management system with ZigBee sensor network. In Proceedings of the 2012 Sixth International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing (IMIS), Palermo, Italy, 4–6 July 2012; pp. 547–551. [Google Scholar]
- Wang, Z.; Wang, L.; Dounis, A.I.; Yang, R. Integration of plug-in hybrid electric vehicles into building energy management system. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011; pp. 1–8. [Google Scholar]
- Lawder, M.T.; Suthar, B.; Northrop, P.W.C.; De, S.; Hoff, C.M.; Leitermann, O.; Crow, M.L.; Santhanagopalan, S.; Subramanian, V.R. Battery energy storage system (BESS) and battery management system (BMS) for grid-scale applications. Proc. IEEE 2014, 102, 1014–1030. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Ojha, U.; Baronti, F.; Chow, M.Y. Battery management system: An overview of its application in the smart grid and electric vehicles. IEEE Ind. Electron. Mag. 2013, 7, 4–16. [Google Scholar] [CrossRef]
- Jousse, J.; Ginot, N.; Batard, C.; Lemaire, E. Power line communication management of battery energy storage in a small-scale autonomous photovoltaic system. IEEE Trans. Smart Grid 2016, PP, 1–9. [Google Scholar] [CrossRef]
- Louganski, K.P. Modeling and Analysis of a DC Power Distribution System in 21st Century Airlifters. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1999. [Google Scholar]
- Fanney, A.H.; Henderson, K.R.; Weise, E.R. Measured performance of a 35 kilowatt roof top photovoltaic system. In Proceedings of the ASME 2003 International Solar Energy Conference, Kohala Coast, HI, USA, 15–18 March 2003. [Google Scholar]
- Becker, D.J. DC microgrids in buildings and data centers. In Proceedings of the 2011 IEEE 33rd International Telecommunications Energy Conference (INTELEC), Amsterdam, The Netherlands, 9–13 October 2011; pp. 1–7. [Google Scholar]
- Lee, F.C.; Boroyevich, D.; Mattavelli, P.; Ngo, K. Prospectus of CPES Mini-Consortium on Renewable Energy and Nanogrids (REN); Center for Power Electronics Systems, Virginia Tech.: Blacksburg, VA, USA, 2010. [Google Scholar]
- Sannino, A.; Postiglione, G.; Bollen, M.H.J. Feasibility of a DC network for commercial facilities. IEEE Trans. Ind. Appl. 2003, 39, 1499–1507. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: Toronto, ON, Canada, 1994; pp. 581–626. [Google Scholar]
- Yu, X.; Tomsovic, K. Application of linear matrix inequalities for load frequency control with communication delays. IEEE Trans. Power Syst. 2004, 19, 1508–1515. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Energy Density Per Unit Area |
|---|---|
| PV | 1. Typical insolation in the United States: 4 kWh/m2/day~6.5 kWh/m2/day. 2. Average efficiency of commercial solar panels: 10% (typical)~20% (high-end). 3. General efficiency of DC/DC converters: 95%. → PV output energy density per unit area: 0.475 kWh/m2/day. |
| PEV | 1. PEV battery capacity: from 8 kWh to 28 kWh. 2. Average area for a vehicle: 16.8 m2 (25~30 m2 if aisle and circulation areas are included). → PEV battery energy density per unit area 1: 0.542 kWh/m2. |
| PEV Conditions | Input Power Pb of the Building Electrical System |
|---|---|
| (A) L > 0 | 1. Pb = Pb_ref. |
| (B) L = 0 (charging) | 1. If Psur = 0, then maintain Pb at Pb_ref. 2. Otherwise, decrease Pb. 3. If L becomes eqaul to or more than 1 when Pb_ref decreases to Pb ± ΔP, then set Pb equal to Pb_ref. |
| (C) L = 0 (discharging) | 1. Pb = −PPV. 2. If L ≥ 1 when Pb_ref increases positive, then set Pb equal to Pb_ref. |
| PEV Conditions | Input Power Ratios (ri,j) of PEV Batteries |
|---|---|
| (D) L = M | 1. Maintain all rj as constant. |
| (E) 0 < L < M | As proportional to the initial values of rj, 1. (Charging): decrease rk and increase rj. 2. (Discharging): decrease rk to 0 and increase rj. |
| (F) L = 0 | 1. (Charging): maintain all rk as constant. 2. (Discharging): maintain all rk at 0. |
| Devices | Specifications | |
|---|---|---|
| AC-DC Bidirectional Converter | Sinv_rated = 40 [kVA], V = 240 [V], frated = 60 [Hz], VDC_rated = 600 [V], R = 0.0113 [Ω], L = 0.09 [mH], C = 4 [mF], Rc = 0.01 [Ω]. | |
| Rooftop PV System | Module | Ppvm_rated = 150 [W], Vprm_rated = 34 [V], Iprm_rated = 4.4 [A], Vocr = 43.4 [V], Iscr = 4.8 [A]. |
| Array | Ns = 13, Np = 18, PPV_rated = 35 [kW]. | |
| PEV Battery | Qrated = 16, 18, and 20 [kWh], Vo = 395.8 [V], VEV_rated = 340 [V], R = 0.17225 [Ω], K = 0.0458 [V/Ah] or [Ω], A = 25.67 V, B = 0.1275 [1/Ah]. | |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y. Modeling and Analysis of a DC Electrical System and Controllers for Implementation of a Grid-Interactive Building. Energies 2017, 10, 427. https://doi.org/10.3390/en10040427
Kim Y. Modeling and Analysis of a DC Electrical System and Controllers for Implementation of a Grid-Interactive Building. Energies. 2017; 10(4):427. https://doi.org/10.3390/en10040427
Chicago/Turabian StyleKim, Youngjin. 2017. "Modeling and Analysis of a DC Electrical System and Controllers for Implementation of a Grid-Interactive Building" Energies 10, no. 4: 427. https://doi.org/10.3390/en10040427
APA StyleKim, Y. (2017). Modeling and Analysis of a DC Electrical System and Controllers for Implementation of a Grid-Interactive Building. Energies, 10(4), 427. https://doi.org/10.3390/en10040427