
A Novel Remaining Useful Life Prediction Approach for Superbuck Converter Circuits Based on Modified Grey Wolf Optimizer-Support Vector Regression


Abstract
:1. Introduction
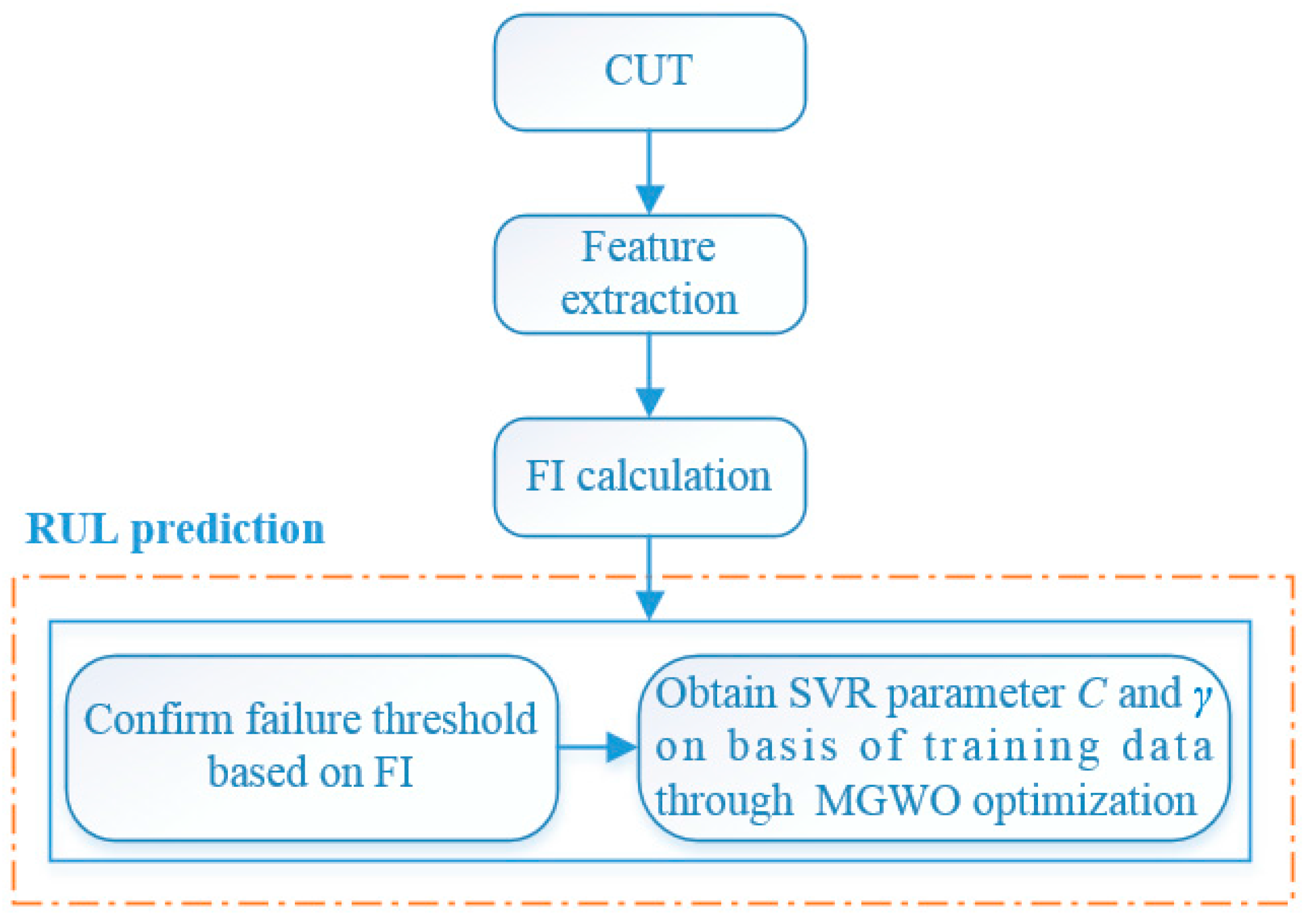
2. Implementation Routine
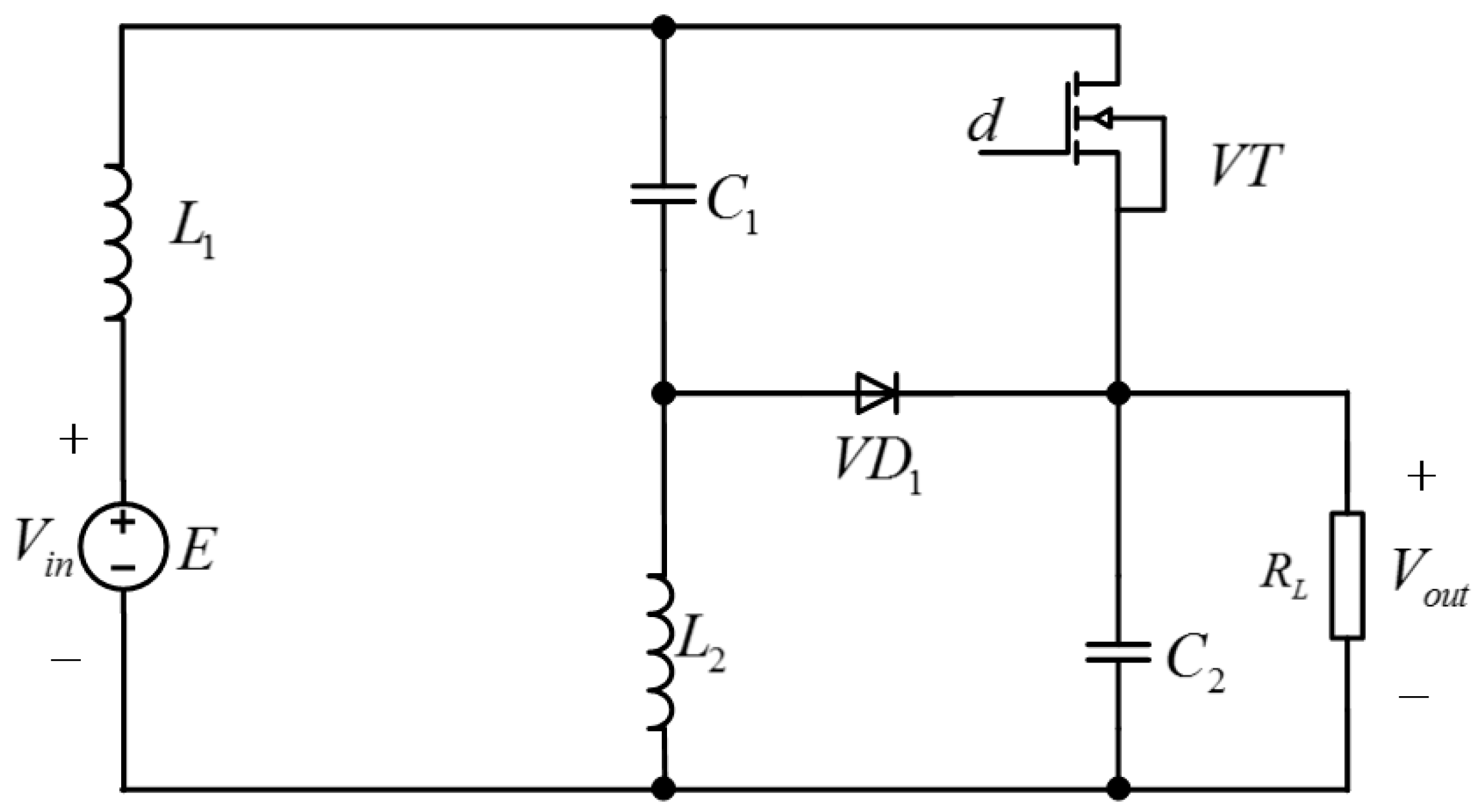
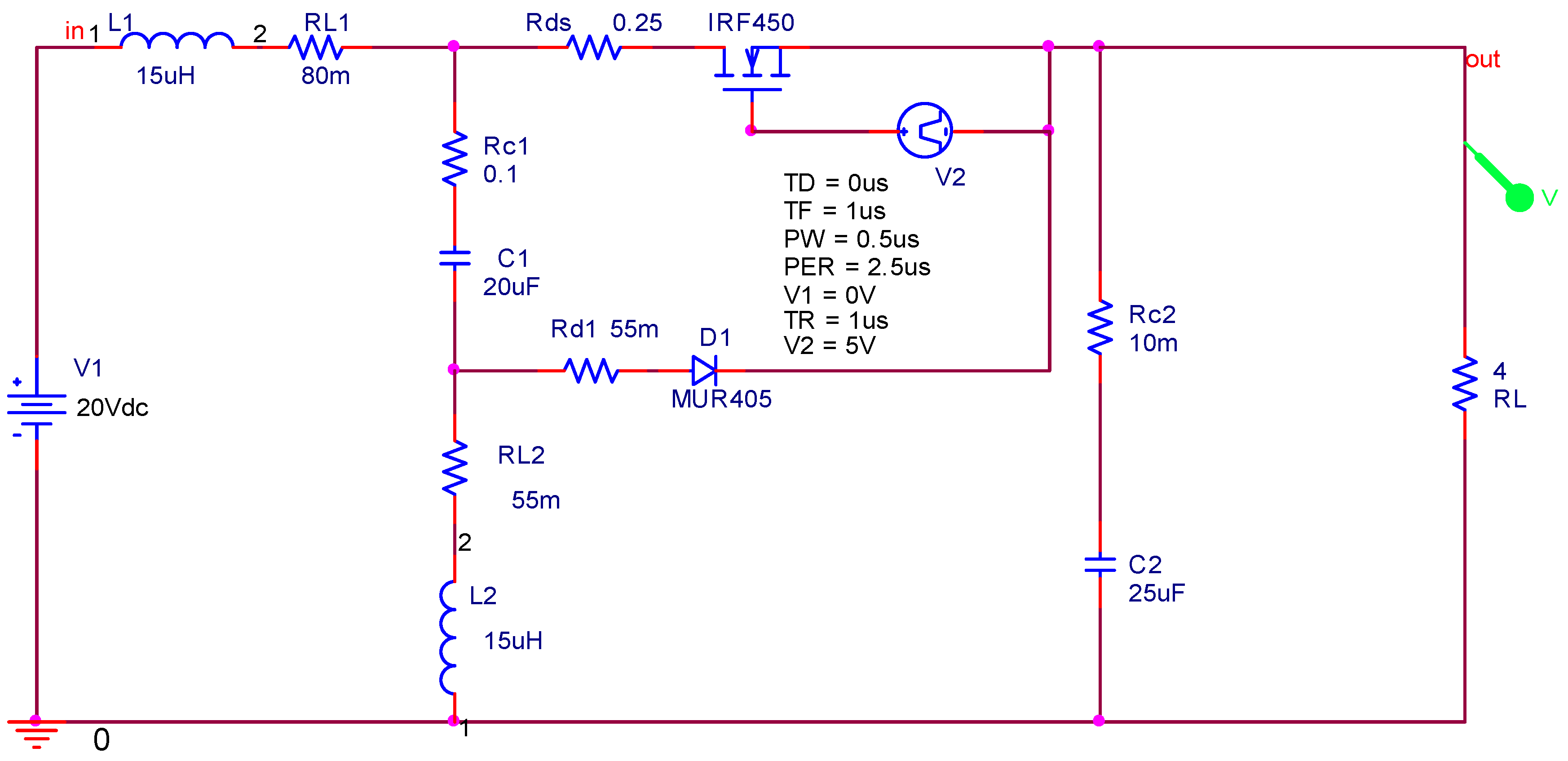
3. Circuit Principle of Superbuck Converter
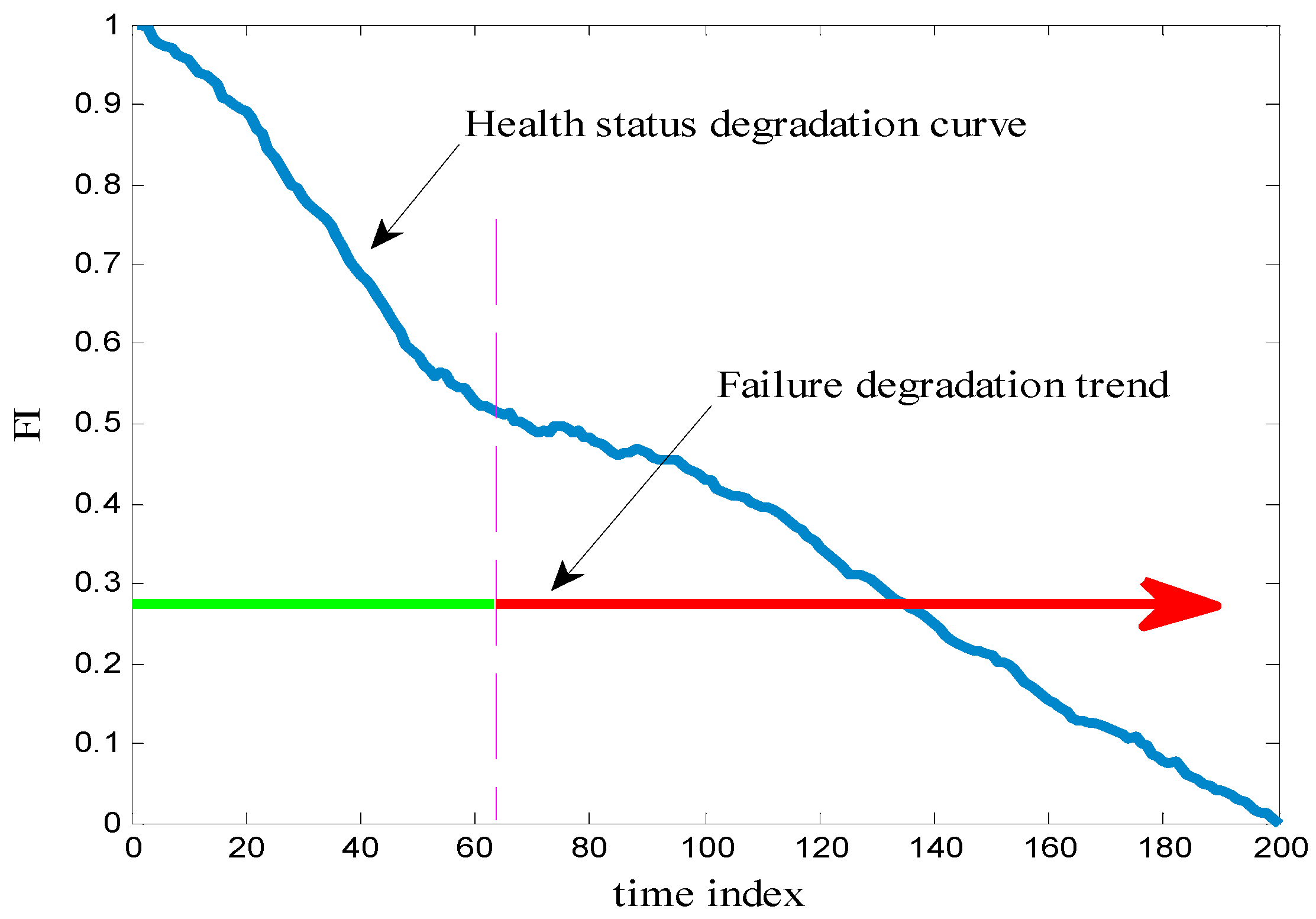
4. Degradation Curve of Circuit Health Status Constructed by Extracted Feature Set
5. Support Vector Regression
5.1. SVR Theoretical Background
5.2. Kernel Functions
6. Parameter Estimation of SVR Based on MGWO
6.1. Grey Wolf Optimizer (GWO) Algorithm
6.1.1. Grey Wolf Behavior
- (1)
- Tracking, chasing and approaching the prey
- (2)
- Pursuing, surrounding and harassing the prey until it stops moving
- (3)
- Attacking the prey.
6.1.2. Mathematical Formulation of Social Behavior of Grey Wolves
Encircling or Trapping Prey
Hunting of Prey
6.2. Modified Grey Wolf Optimizer (MGWO) Algorithm
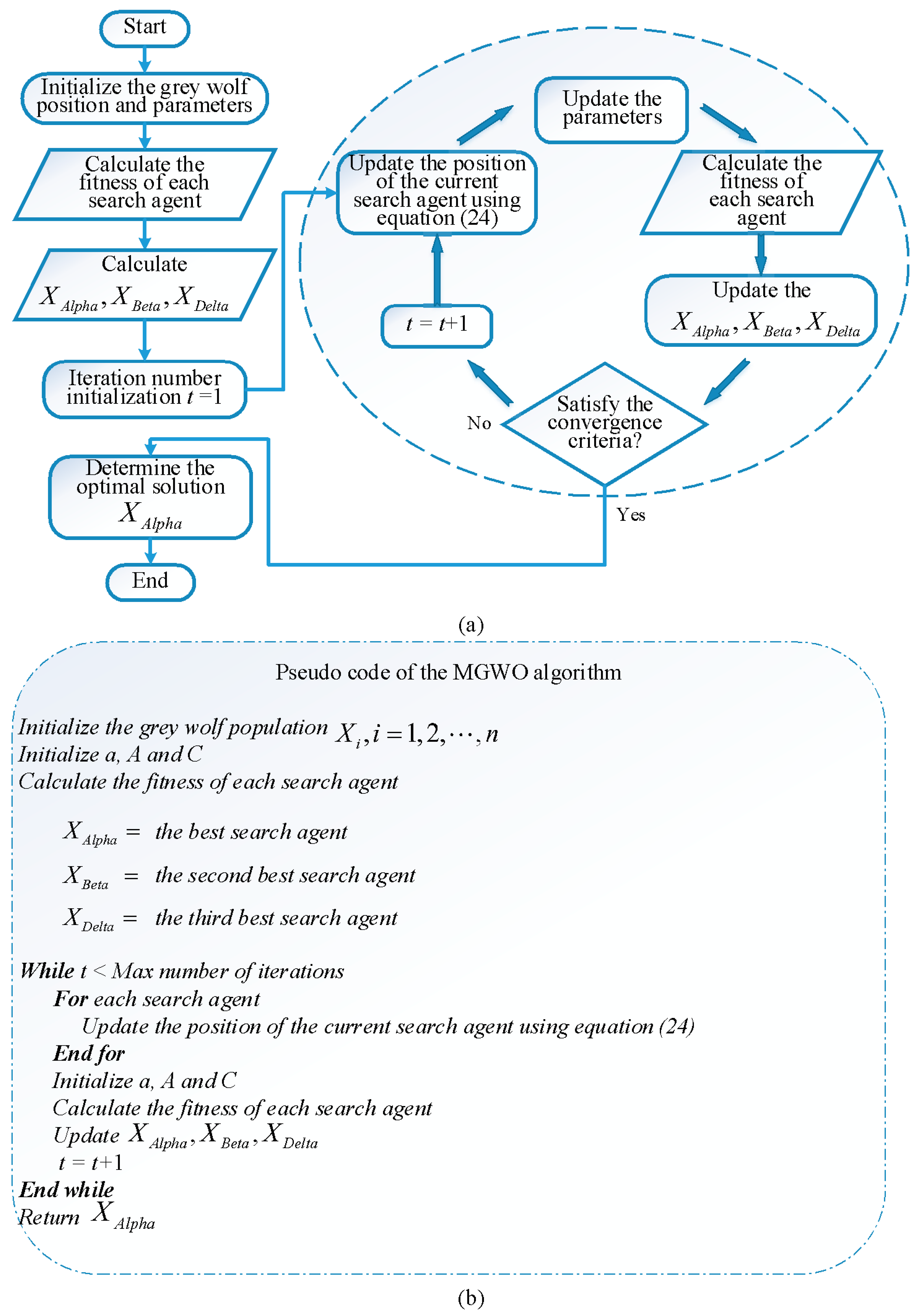
6.3. Procedure of Parameter Estimation of SVR Using MGWO
- (1)
- The penalty factor and kernel function parameter of SVR are initialized, and the related parameters of MGWO algorithm are set up.
- (2)
- Randomly generate a wolf pack, where the position vector of each agent corresponds to the parameter and parameter .
- (3)
- Calculate the fitness value of each agent, based on initial parameters and , by the training set for learning. Fitness value function is the correct rate in the sense of k-fold cross-validation method.
- (4)
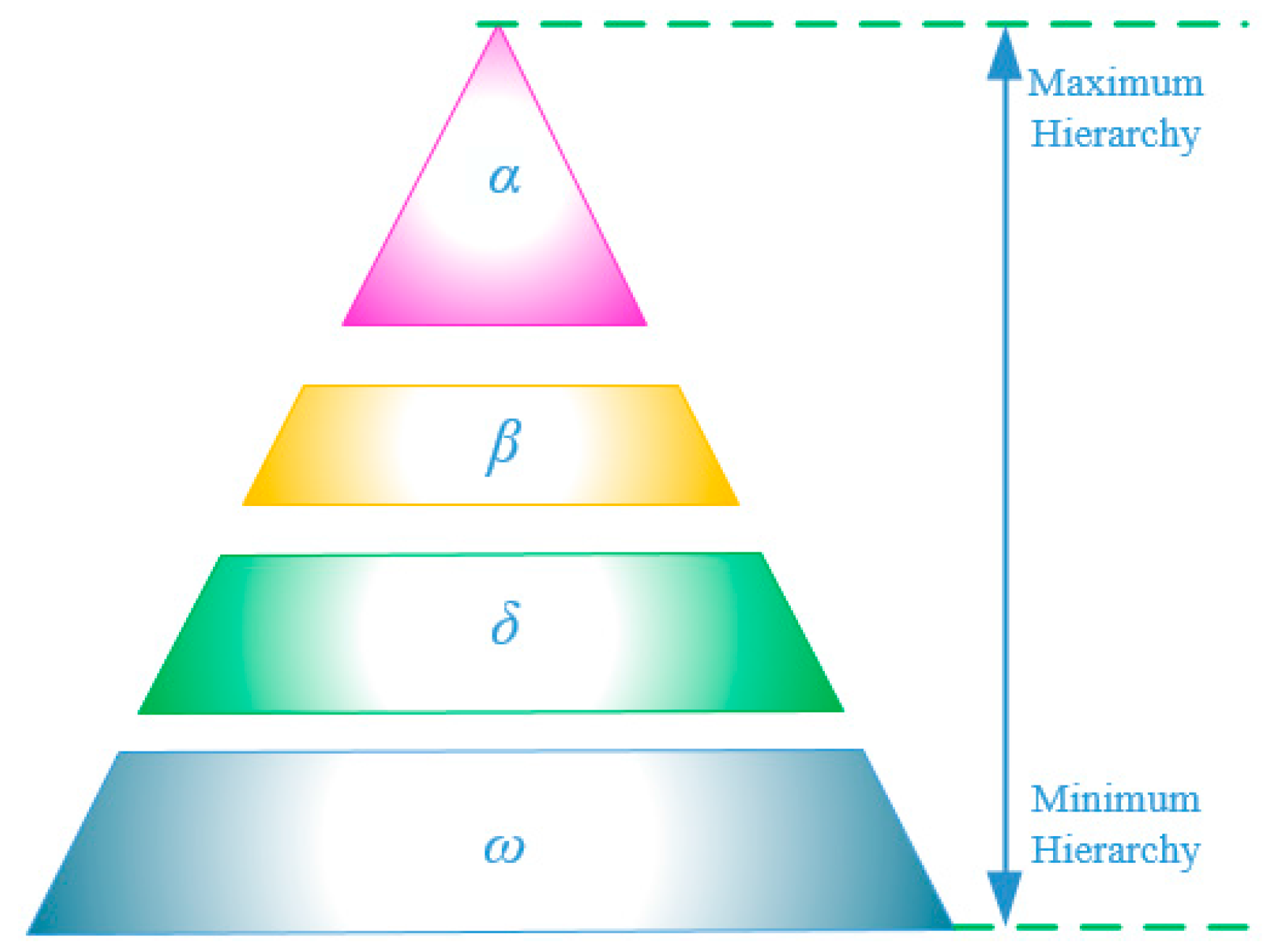
- According to the fitness value, the agents are divided into four grades.
- (5)
- Update the location of each agent according to the Equations (21)–(24).
- (6)
- Calculate the fitness value of each agent corresponds to the new location and compare it with the results of the previous iteration. If the fitness value is better than the previous fitness value, then the agent fitness value and position instead of the best of the original pack, otherwise keep the original results to continue the iteration.
- (7)
- If the number of iterations exceeds the maximum allowed number of times, the training is over, and the output of the group optimal location is the SVR optimal value, parameter and parameter , otherwise jump to step 4.
- (8)
- The prediction model is established by using the optimal parameters parameter and parameter , and the test set is used to predict the experimental results.
7. Experiments and Discussion
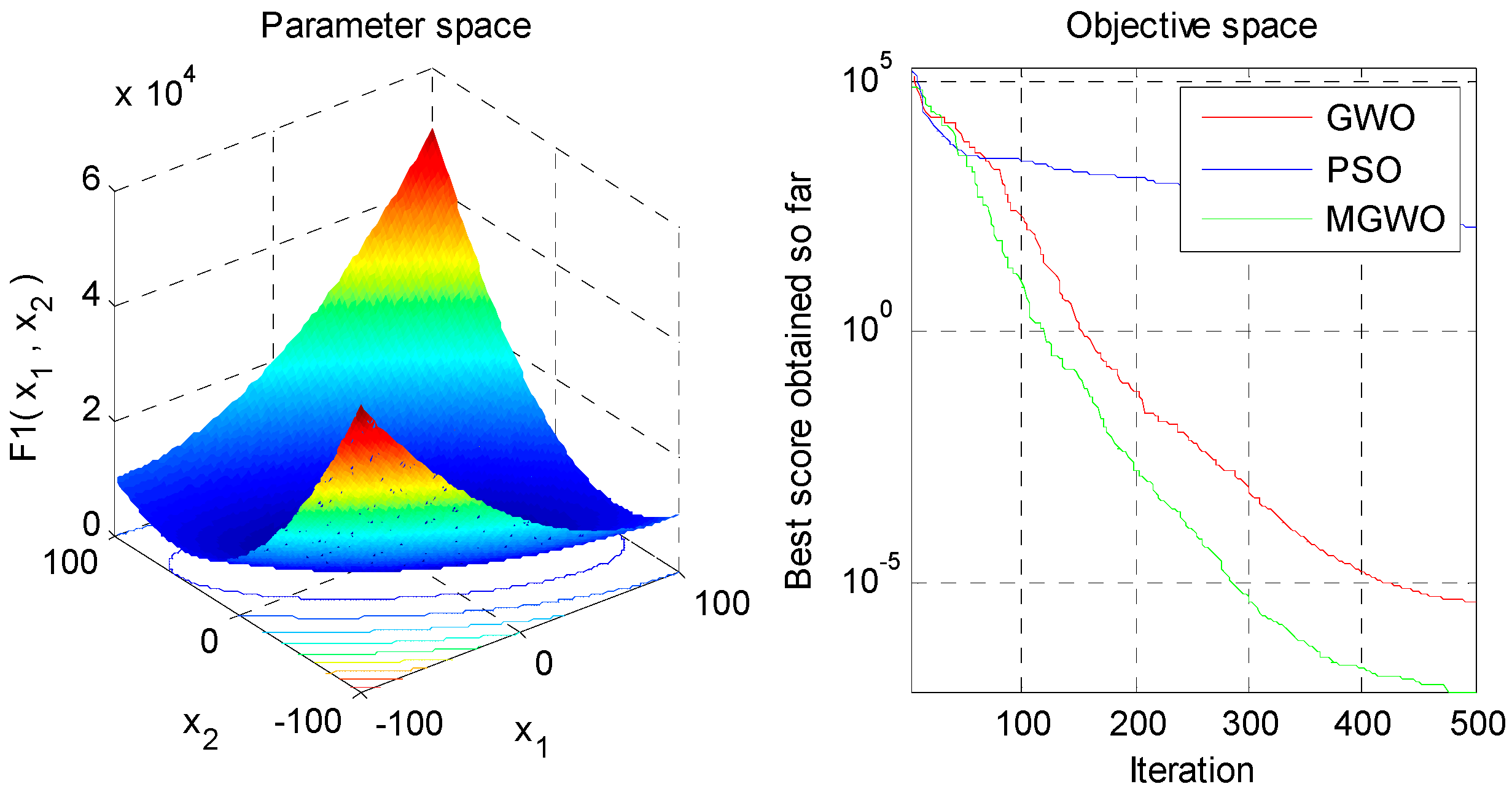
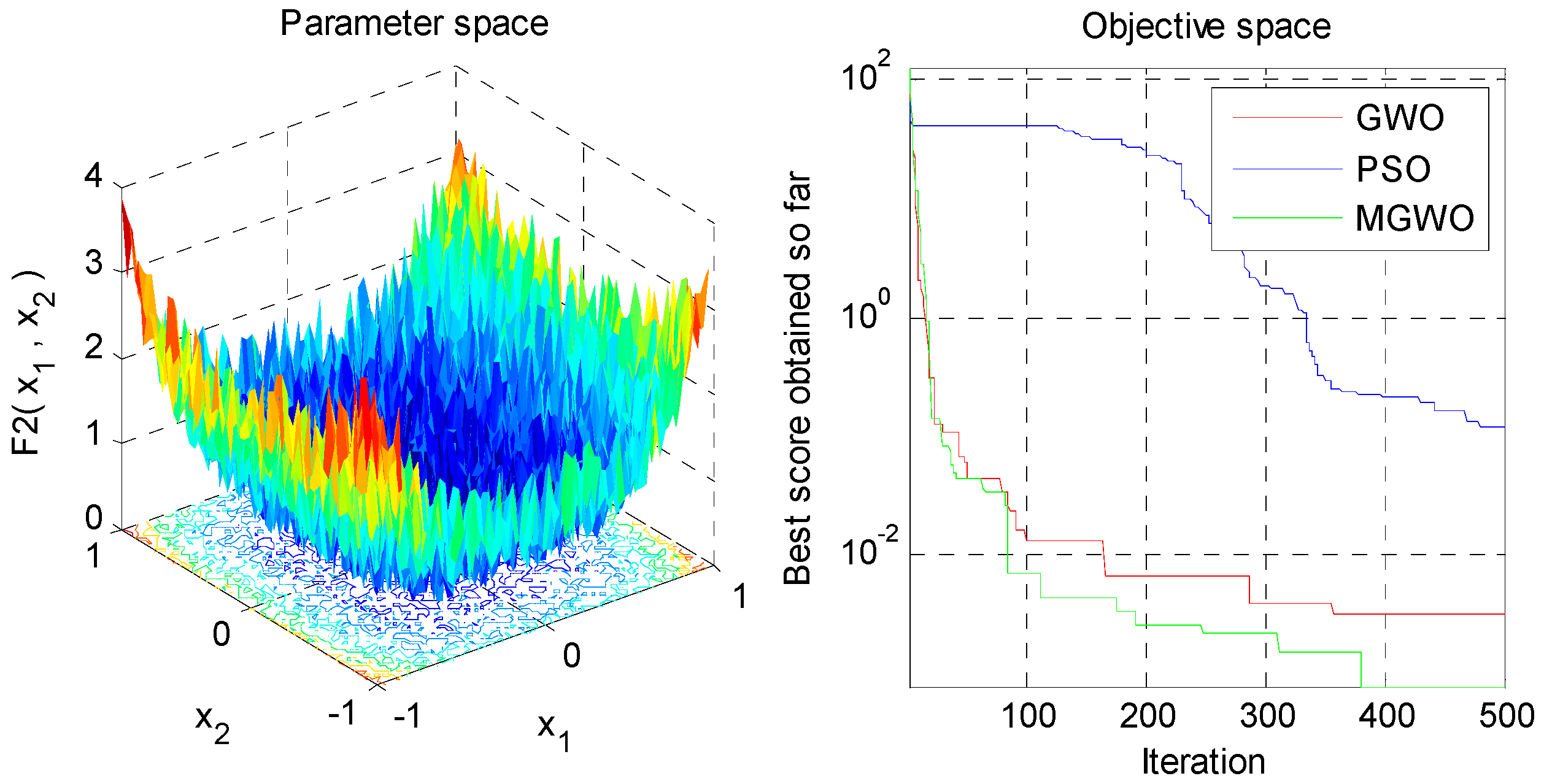
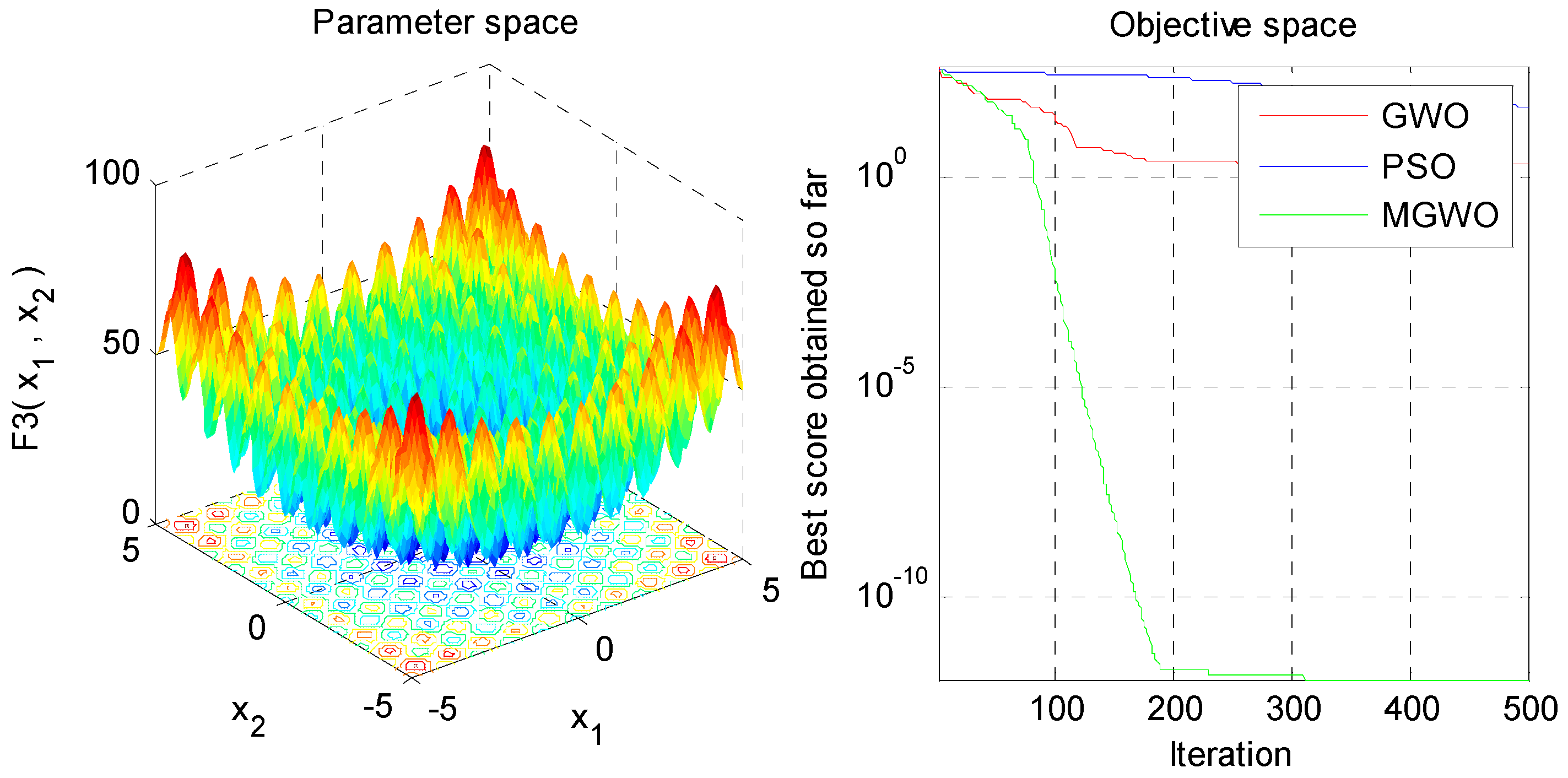
7.1. Benchmark Function Test Experiment
7.1.1. Selection of Benchmark Functions
7.1.2. Comparative Experimental Results Analysis
7.2. CUT Simulation Experiment
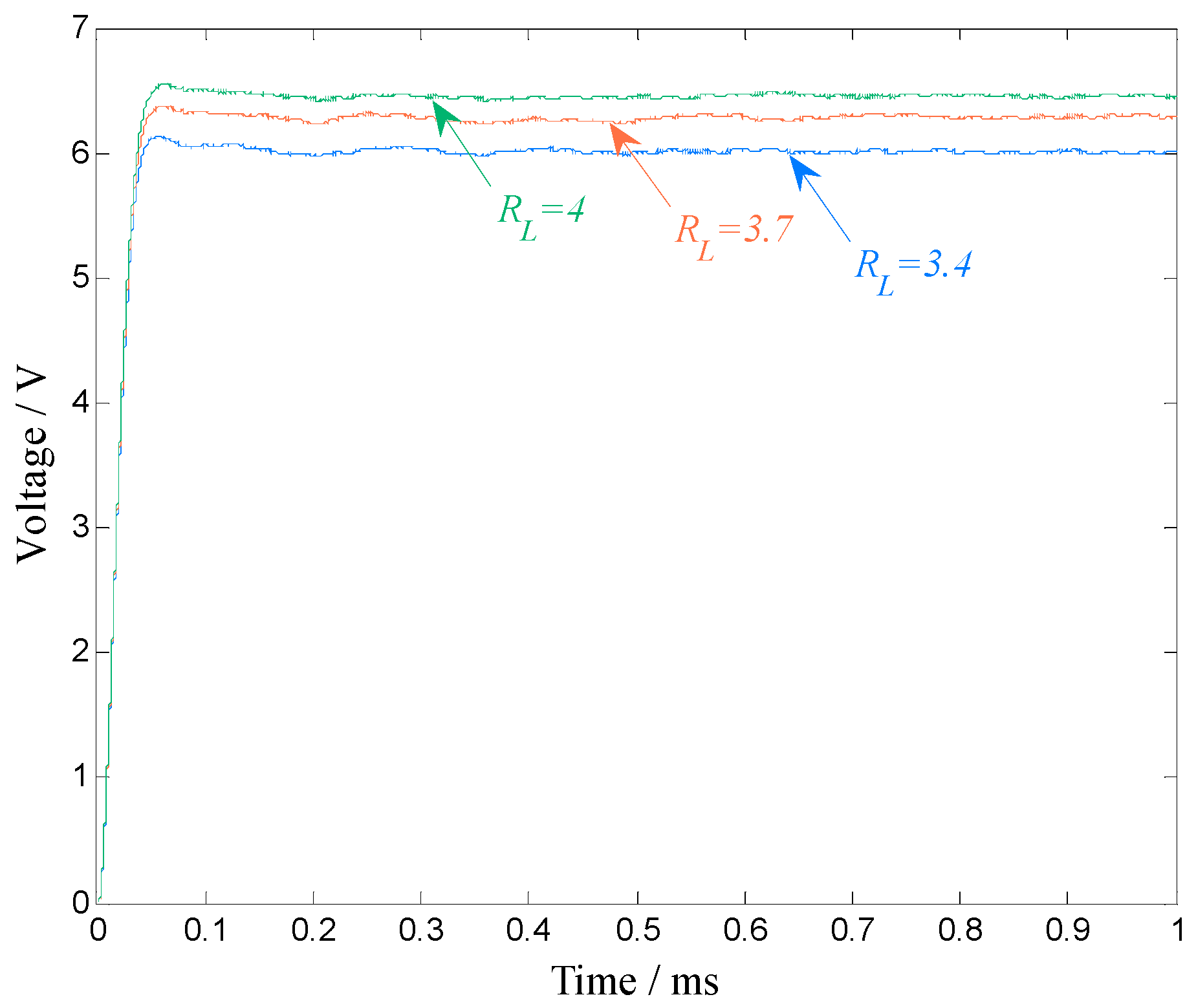
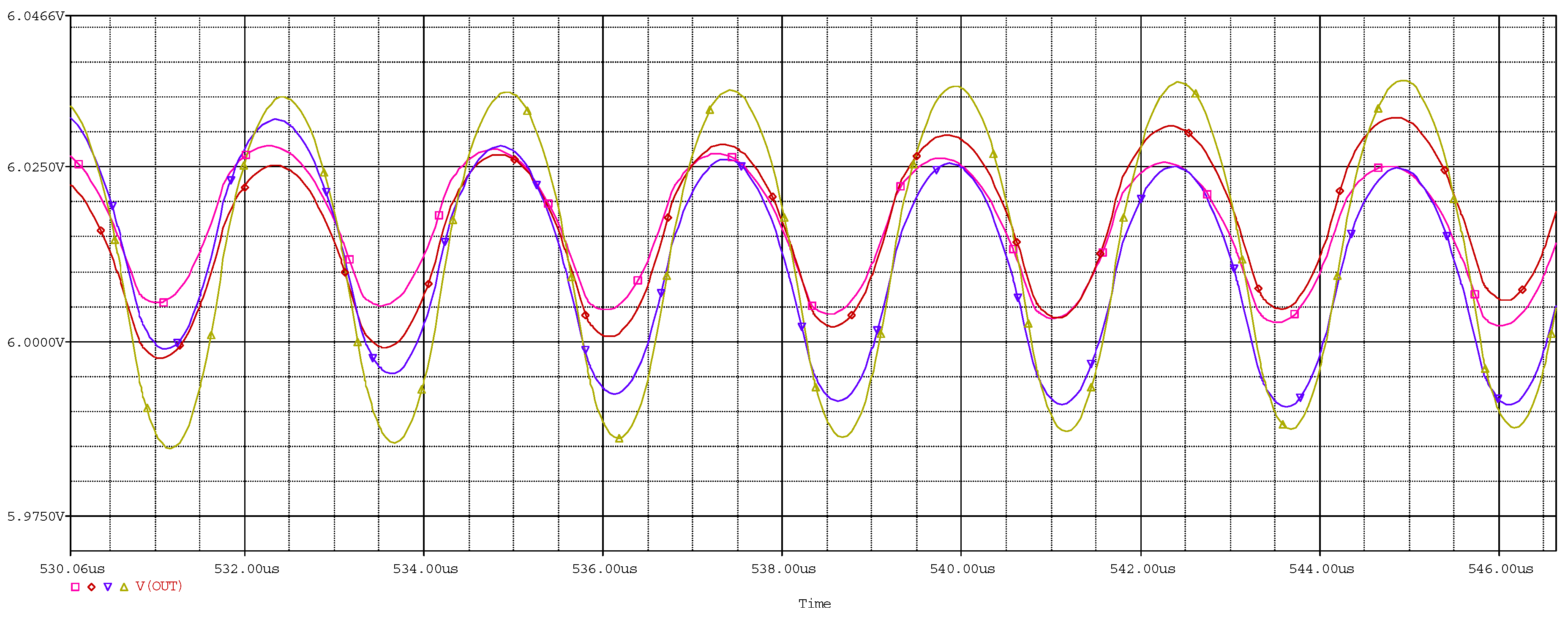
7.2.1. CUT Parameter Setting and Data Acquisition
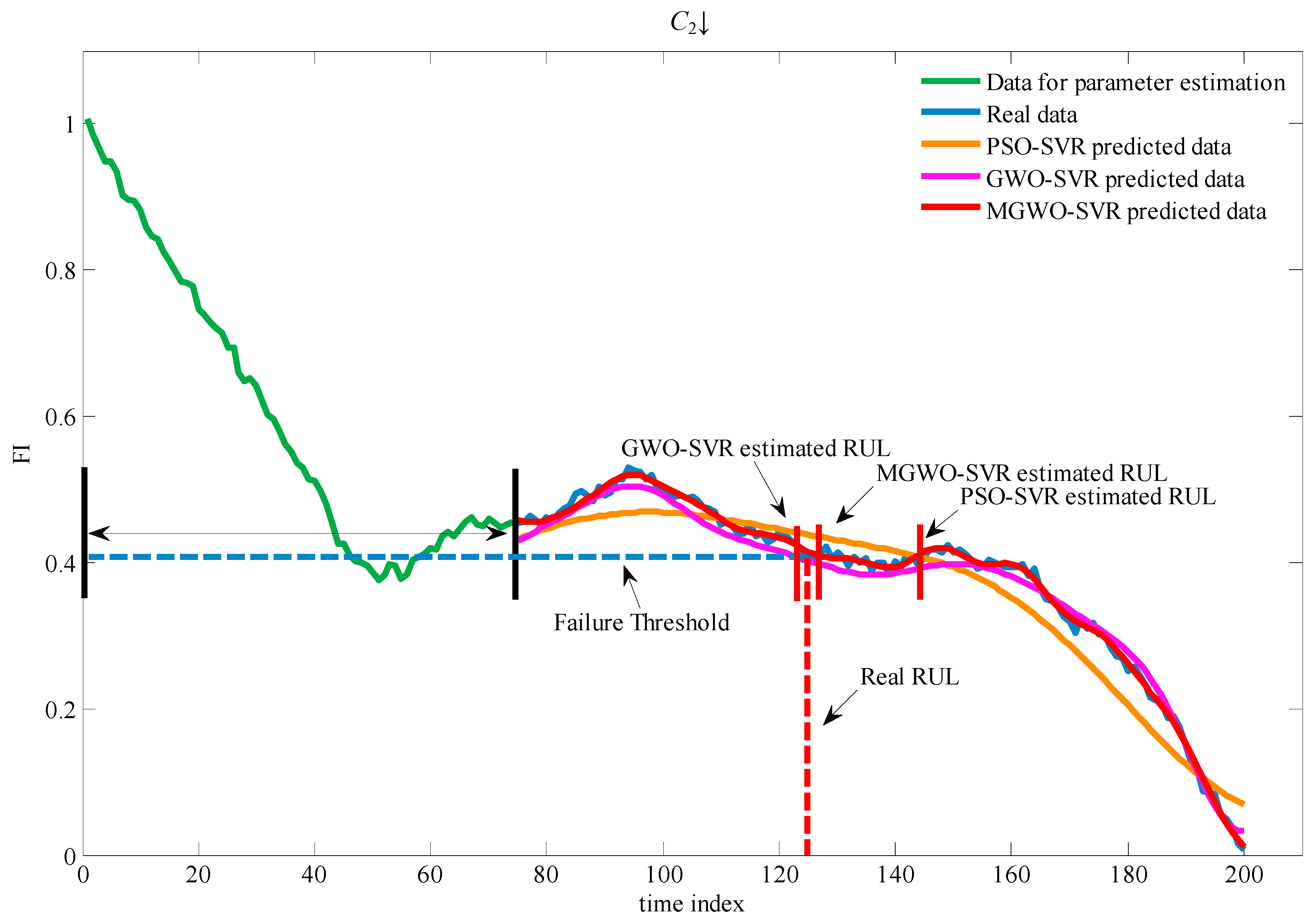
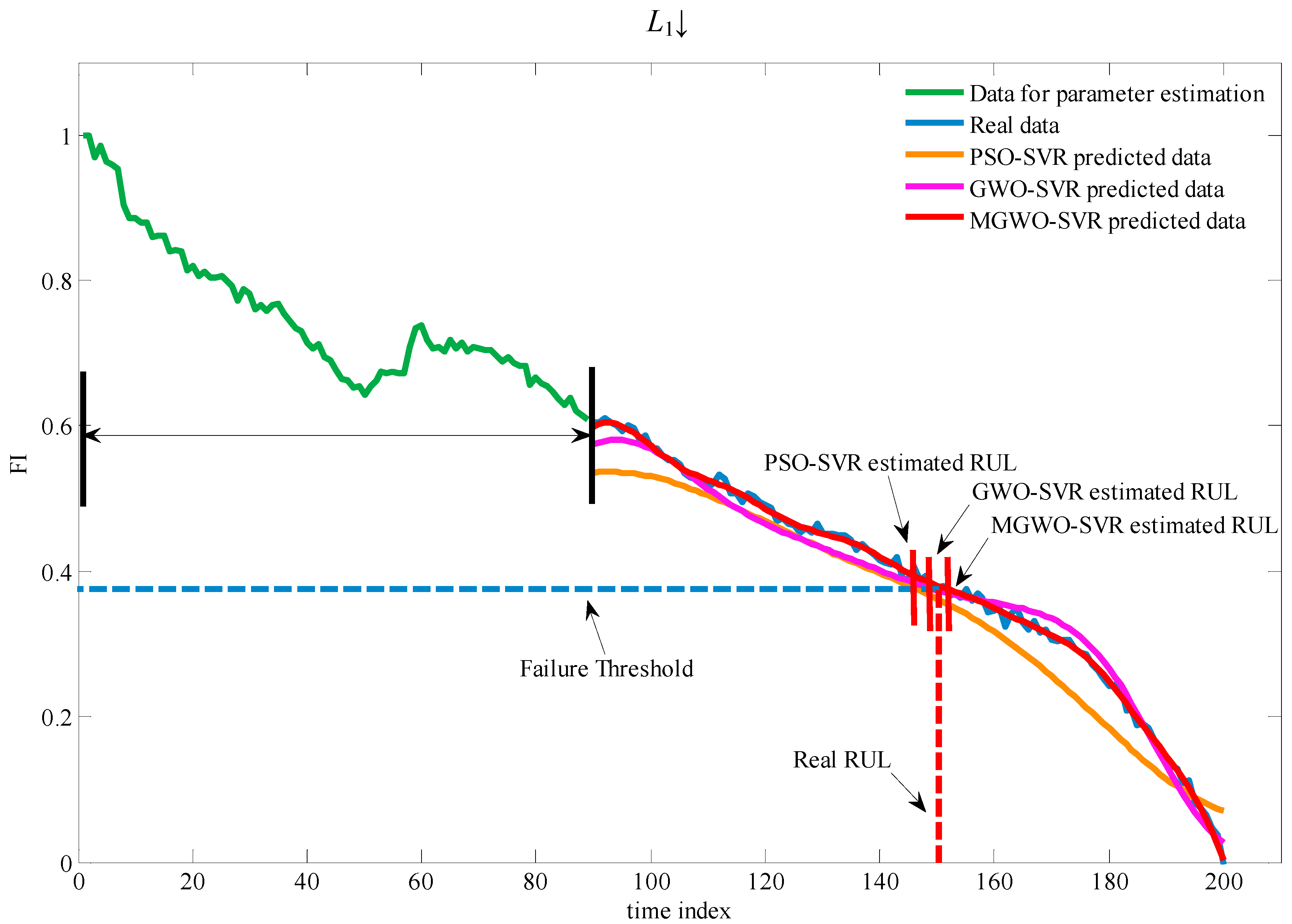
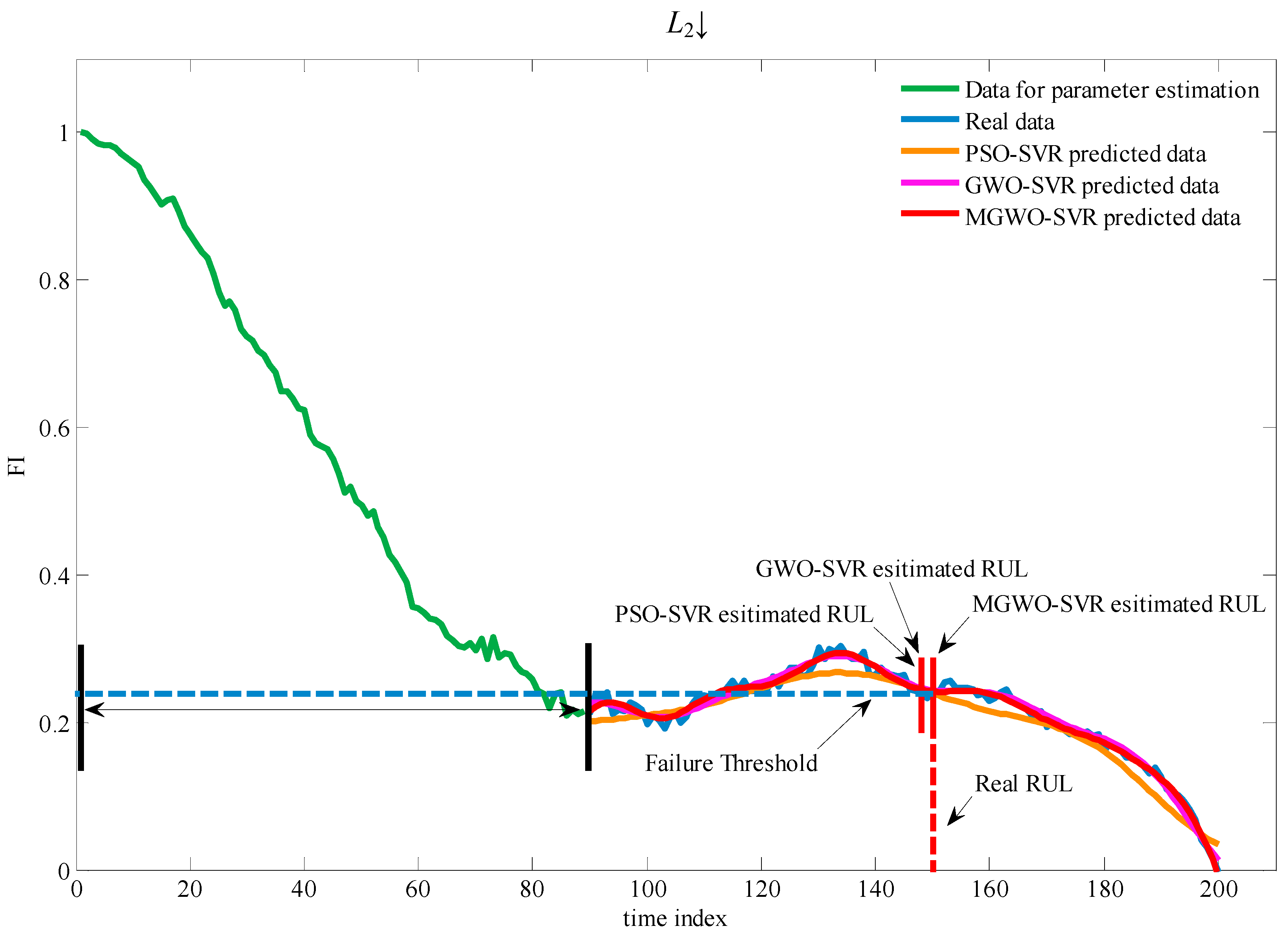
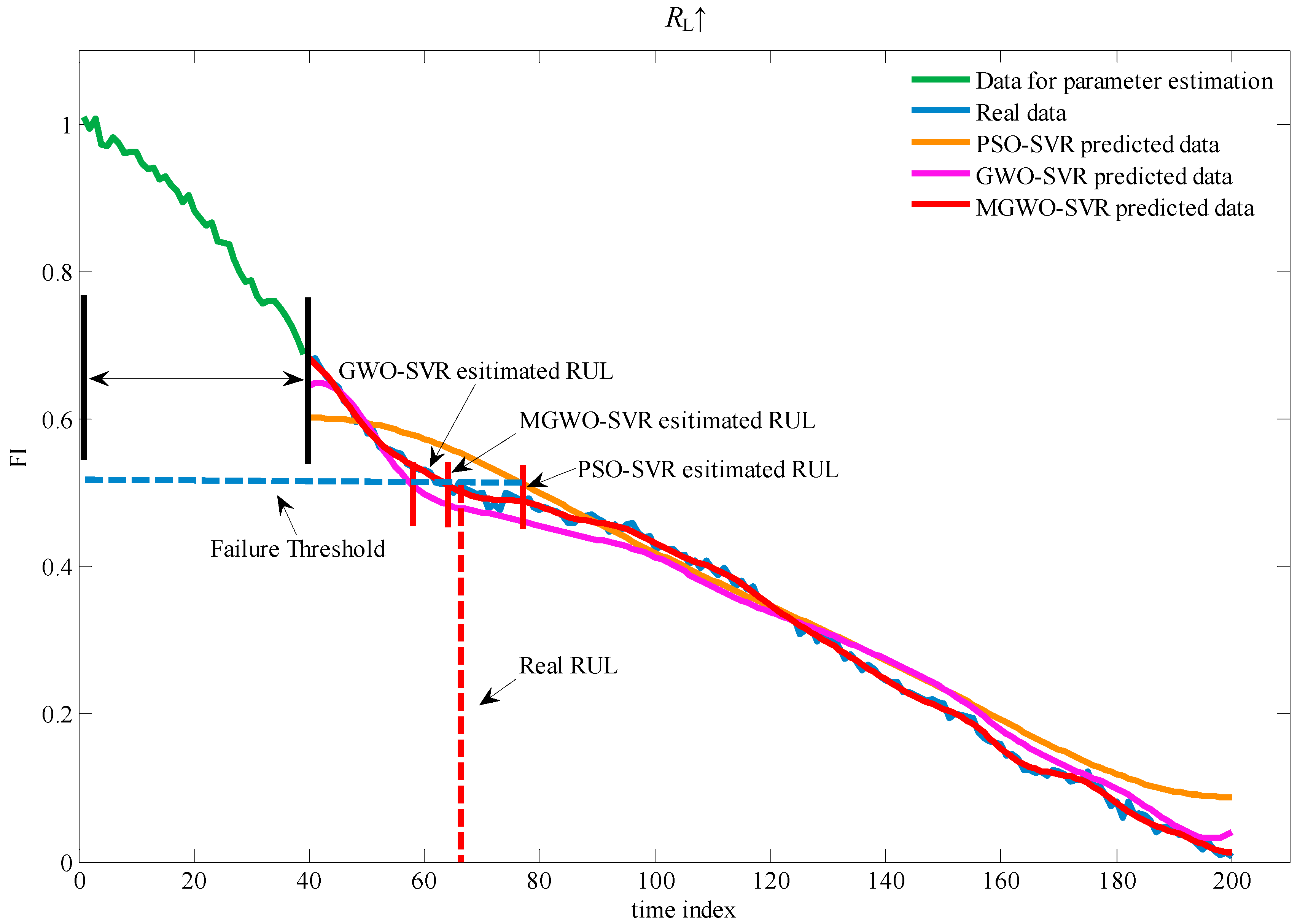
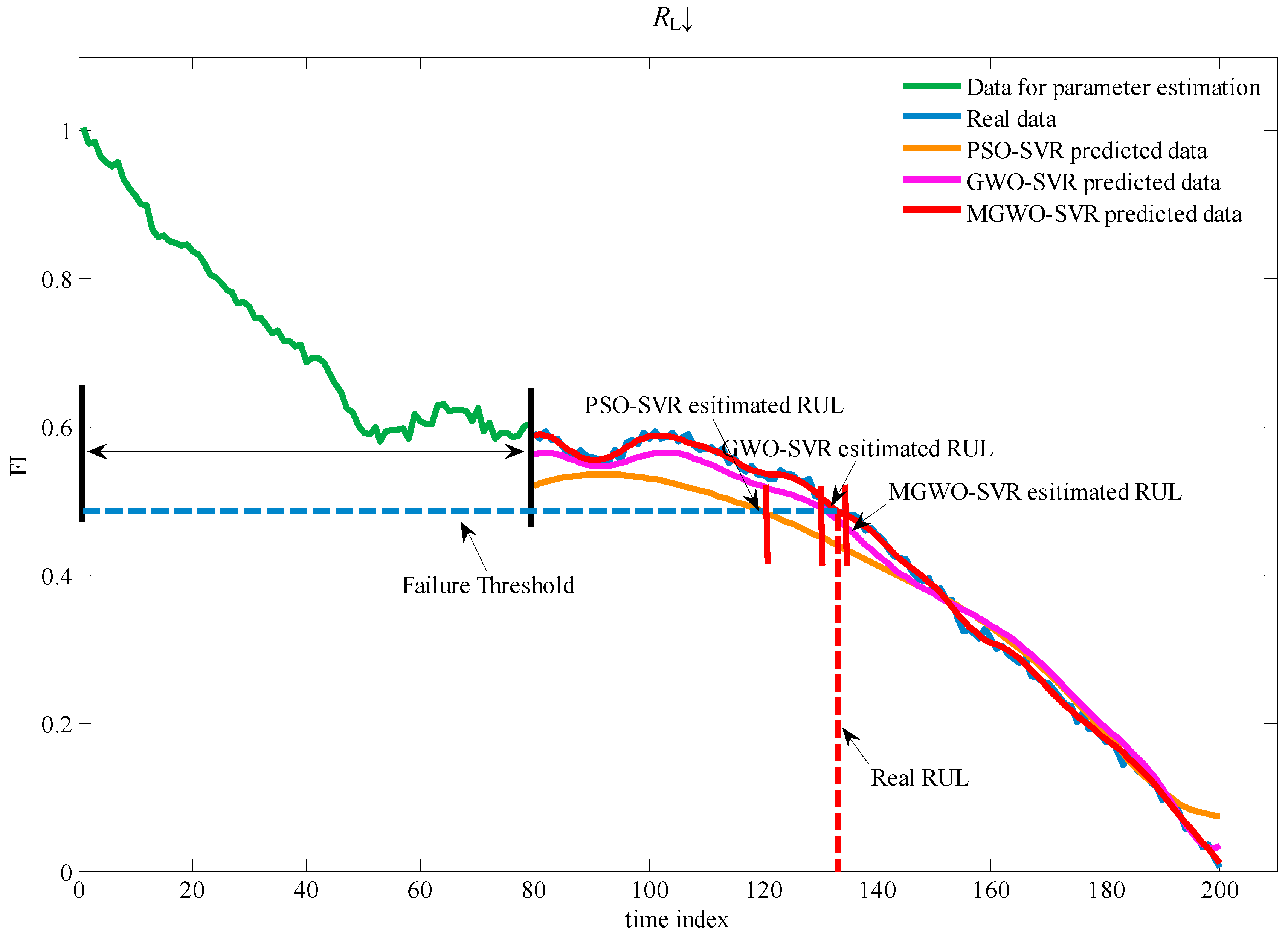
7.2.2. Results of CUT RUL Prediction
- Case 1. Predict at time index 75 for C2↓.
- Case 2. Predict at time index 90 for L1↓.
- Case 3. Predict at time index 90 for L2↓.
- Case 4. Predict at time index 40 for RL↑.
- Case 5. Predict at time index 80 for RL↓.
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pecht, M.; Jaai, R. A prognostics and health management roadmap for information and electronics-rich systems. Microelectron. Reliab. 2010, 50, 317–323. [Google Scholar] [CrossRef]
- Sheppard, J.W.; Kaufman, M.A.; Wilmering, T.J. IEEE standards for prognostics and health management. IEEE Aerosp. Electron. Syst. Mag. 2009, 24, 34–41. [Google Scholar] [CrossRef]
- Vasan, A.S.S.; Long, B.; Pecht, M. Diagnostics and prognostics method for analog electronic circuits. IEEE Trans. Ind. Electron. 2013, 60, 5277–5291. [Google Scholar] [CrossRef]
- Cui, Y.; Shi, J.; Wang, Z. Quantum assimilation-based state-of-health assessment and remaining useful life estimation for electronic systems. IEEE Trans. Ind. Electron. 2016, 63, 2379–2390. [Google Scholar] [CrossRef]
- Alam, M.A.; Azarian, M.H.; Osterman, M.; Pecht, M. Prognostics of failures in embedded planar capacitors using model-based and data-driven approaches. J. Intell. Mater. Syst. Struct. 2011, 22, 1293–1304. [Google Scholar] [CrossRef]
- Lee, C.M.; Ko, C.N. Short-term load forecasting using adaptive annealing learning algorithm based reinforcement neural network. Energies 2016, 9, 987. [Google Scholar] [CrossRef]
- Han, L.; Narendran, N. An accelerated test method for predicting the useful life of an LED driver. IEEE Trans. Power Electron. 2011, 26, 2249–2257. [Google Scholar] [CrossRef]
- Widodo, A.; Shim, M.C.; Caesarendra, W.; Yang, B.S. Intelligent prognostics for battery health monitoring based on sample entropy. Expert Syst. Appl. 2011, 38, 11763–11769. [Google Scholar] [CrossRef]
- Ye, X.; Chen, C.; Wang, Y.; Zhai, G. Methodology research for health condition assessment of power supply based on simulation. J. Syst. Simul. 2015, 27, 185–191. [Google Scholar]
- Zhou, H. Research on Reliability of Aluminum Electrolytic Capacitor in SMPS. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Du, Y.; Guan, Y.; Wu, L.; Pan, W.; Wang, G.; Zhou, S. The impact of MOSFET and electrolytic capacitor on the DC-DC converter. J. Digit. Content Technol. Appl. 2011, 3, 170–180. [Google Scholar]
- Wu, Y. Research on Fault Characteristic Parameters Extraction and Health Forecast Methods of Power Electronic Circuits. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2013. [Google Scholar]
- Wu, Y.; Wang, Y.; Jiang, Y.; Lin, H. Fault prediction method of DC/DC converter based on characteristic parameter degradation. Chin. J. Sci. Instrum. 2013, 34, 181–188. [Google Scholar]
- Jiang, Y.; Wang, Y.; Luo, H.; Lin, H.; Cui, J. An innovative metric for power electronic circuit failure evaluation and a novel prediction method based on LSSVM. Trans. China Electrotech. Soc. 2012, 27, 43–50. [Google Scholar]
- Tan, X. Research of Failure Prediction of BUCK Circuit Based on Mahalanobis Distance. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2013. [Google Scholar]
- Sun, F. Research on Fault Prediction Method of Power Electronic Circuit. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2010. [Google Scholar]
- Wang, F. Study on Health Management for Intelligent Switching-Mode Power Supply. Master’s Thesis, Chinese Academy of Sciences (Changchun Institute of Optics, Fine Mechanics and Physics), Changchun, China, 2015. [Google Scholar]
- Zhou, S.; Guan, Y.; Wu, L.; Pan, W.; Wang, G.; Du, Y. Design and realization of DC-DC converter life prediction system based on LabView. J. Converg. Inf. Technol. 2011, 6, 300–308. [Google Scholar]
- Feng, F. Research on Detection Method of Long Lifetime Aerospace DC/DC Converter. Master’s Thesis, Xidian University, Xi’an, China, 2013. [Google Scholar]
- Wang, S. Research on Online Reliability Estimation and Residual Life Prediction Method for On-Board Electronic Equipment. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2014. [Google Scholar]
- Chen, S. Research on Degradation Model and Lifetime Prognosis Method for Power MOSFET. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2013. [Google Scholar]
- Chen, Y. Research on New Parameter Identification Methods and Failure Prediction Algorithms of Power Electronic Circuits. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2012. [Google Scholar]
- Jia, Y. Research on Fault Prediction of the Power Electronic Devices Based on Improved Gray System. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2012. [Google Scholar]
- Li, M.; Xian, W.; Long, B.; Wang, H. Prognostics of analog filters based on particle filters using frequency features. J. Electron. Test. 2013, 29, 567–584. [Google Scholar] [CrossRef]
- Hu, Z.W.; Xiao, M.Q.; Zhang, L.; Song, H.F.; Yang, Z. Incipient fault diagnostics and remaining useful life prediction of analog filters. J. Electron. Test. 2015, 31, 461–477. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.H.; Hong, W.C.; Shen, W.; Huang, N.N. Electric load forecasting based on a least squares support vector machine with fuzzy time series and global harmony search algorithm. Energies 2016, 9, 70. [Google Scholar] [CrossRef]
- Peng, L.L.; Fan, G.F.; Huang, M.L.; Hong, W.C. Hybridizing DEMD and quantum PSO with SVR in electric load forecasting. Energies 2016, 9, 221. [Google Scholar] [CrossRef]
- Li, Z.X.; Rahman, S.M.M.; Vega, R.; Dong, B. A hierarchical approach using machine learning methods in solar photovoltaic energy production forecasting. Energies 2016, 9, 55. [Google Scholar] [CrossRef]
- Zhang, Q.; Lai, K.K.; Niu, D.X.; Wang, Q.; Zhang, X.B. A fuzzy group forecasting model based on least squares support vector ma-chine (LS-SVM) for short-term wind power. Energies 2012, 5, 3329–3346. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Muro, C.; Escobedo, R.; Spector, L.; Coppinger, R.P. Wolf-pack (Canis lupus) hunting strategies emerge from simple rules in computational simulations. Behav. Process. 2011, 88, 192–197. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Name | Dim | Range | |
|---|---|---|---|
| F1: | 30 | 0 | |
| F2: | 30 | (−1.28,1.28) | 0 |
| F3: | 30 | (−5.12,5.12) | 0 |
| Function Name | PSO | GWO | MGWO | |||
|---|---|---|---|---|---|---|
| Ave | Std | Ave | Std | Ave | Std | |
| F1 | 77.2380 | 35.2769 | 3.46 × 10−5 | 6.08 × 10−5 | 2.41 × 10−6 | 2.62 × 10−6 |
| F2 | 49.4660 | 5.9206 | 3.9850 | 2.9204 | 0.6772 | 1.3544 |
| F3 | 0.1416 | 0.0407 | 0.00301 | 0.0010 | 0.0017 | 0.0005 |
| Cases | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSO | GWO | MGWO | PSO | GWO | MGWO | PSO | GWO | MGWO | PSO | GWO | MGWO | PSO | GWO | MGWO | |
| Real RUL | 125 | 125 | 125 | 150 | 150 | 150 | 150 | 150 | 150 | 66 | 66 | 66 | 133 | 133 | 133 |
| Estimated RUL | 144 | 123 | 127 | 146 | 149 | 152 | 149 | 149 | 150 | 77 | 58 | 64 | 121 | 131 | 134 |
| Prediction error | 19 | 2 | 2 | 4 | 1 | 2 | 1 | 1 | 0 | 11 | 12 | 2 | 12 | 2 | 1 |
| MSE | 0.1476 | 0.1291 | 0.0374 | 0.1627 | 0.1401 | 0.0291 | 0.0844 | 0.0711 | 0.0366 | 0.2007 | 0.1920 | 0.0406 | 0.2208 | 0.0990 | 0.0321 |
| MAE | 0.0231 | 0.0209 | 0.0052 | 0.0241 | 0.0235 | 0.0046 | 0.0131 | 0.0112 | 0.0054 | 0.0230 | 0.0265 | 0.0054 | 0.0332 | 0.0158 | 0.0049 |
| RMSE | 0.2087 | 0.1826 | 0.0529 | 0.2301 | 0.1982 | 0.0412 | 0.1193 | 0.1006 | 0.0517 | 0.2839 | 0.2715 | 0.0575 | 0.3123 | 0.1400 | 0.0454 |
| SSE | 0.0871 | 0.0667 | 0.0056 | 0.1059 | 0.0785 | 0.0034 | 0.0285 | 0.0202 | 0.0053 | 0.1612 | 0.1474 | 0.0066 | 0.1951 | 0.0392 | 0.0041 |
| PCC | 0.9772 | 0.9926 | 0.9985 | 0.9872 | 0.9917 | 0.9993 | 0.9778 | 0.9789 | 0.9938 | 0.9878 | 0.9875 | 0.9994 | 0.9942 | 0.9956 | 0.9995 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Yue, J.; Su, Y.; Lu, F.; Sun, Q. A Novel Remaining Useful Life Prediction Approach for Superbuck Converter Circuits Based on Modified Grey Wolf Optimizer-Support Vector Regression. Energies 2017, 10, 459. https://doi.org/10.3390/en10040459
Wang L, Yue J, Su Y, Lu F, Sun Q. A Novel Remaining Useful Life Prediction Approach for Superbuck Converter Circuits Based on Modified Grey Wolf Optimizer-Support Vector Regression. Energies. 2017; 10(4):459. https://doi.org/10.3390/en10040459
Chicago/Turabian StyleWang, Li, Jiguang Yue, Yongqing Su, Feng Lu, and Qiang Sun. 2017. "A Novel Remaining Useful Life Prediction Approach for Superbuck Converter Circuits Based on Modified Grey Wolf Optimizer-Support Vector Regression" Energies 10, no. 4: 459. https://doi.org/10.3390/en10040459
APA StyleWang, L., Yue, J., Su, Y., Lu, F., & Sun, Q. (2017). A Novel Remaining Useful Life Prediction Approach for Superbuck Converter Circuits Based on Modified Grey Wolf Optimizer-Support Vector Regression. Energies, 10(4), 459. https://doi.org/10.3390/en10040459