1. Introduction
Sustained power system oscillation has become a serious problem for power system operation and control nowadays. Oscillations cause safety problems in electric power equipment and limit the transmission capacity of long distance power transmission. Even, in the most severe cases, growing power oscillations may lead to the collapse and blackout of the whole interconnected system if no appropriate measures are taken in time [
1].
Power system stabilizers (PSSs), as one kind of the most economical and practical devices, have been widely equipped on synchronous generators to provide damping torque and stabilize power system oscillations [
2], but the damping performance of the conventional PSS in suppressing power system oscillations is limited, especially the inter-area oscillation modes, since the local measurement feedback signals of PSSs are of low inter-area mode observability [
3]. To damp out inter-area low frequency oscillation modes more efficiently, new damping measures need to be developed.
Flexible AC transmission system (FACTS) devices, commonly located in power systems, are primarily used for scheduling power flow and/or providing voltage support [
4]. Besides that, with the advance of fast acting FACTS controllers, it is possible to improve system dynamic stability and dampen system low frequency oscillations [
5]. The concept of power oscillation damper (POD) is widely accepted by the engineers to restrain inter-area oscillations in power grids [
6]. Considerable research focus has been given on designing various FACTS PODs and their coordination with PSSs to significantly improve the small signal stability of power systems [
7].
On the other hand, due to the energy crisis and environmental pollution problems, generating electricity from clean and renewable energy, especially wind power, has become very popular all around the world [
8,
9]. High proportional integration of wind power generators has an important influence on the dynamic stability of power system [
10], while, at the same time, they play a certain role in improving power system stability [
11,
12,
13]. Recently, several researches have proposed the possibility of using doubly-fed induction generator (DFIG)-based wind farms to improve damping performance and enhance the dynamic stability of wind power integrated power systems [
14,
15,
16,
17,
18,
19,
20,
21]. Many novel control schemes have been proposed for DFIGs to enable them to provide an auxiliary power system stabilization function or contribute to system voltage support during network faults [
20,
21,
22,
23,
24,
25]. What is more, wind farm POD design derived from the classical phase compensation principle of PSS has become a research hotspot [
23,
24,
25,
26]. Many accomplished PSS design methods can be easily applied to design of DFIG POD.
In summary, designing a single type damping controller is already a widely accepted engineering practice. Coordinated control of multiple damping controllers, such as PSSs and PODs, can not only enhance system dynamic stability but also increase system operating flexibility. However, when PSS, FACTS and DFIG exist in a system, how to realize coordinated tuning of multiple damping controllers is a challenging problem. This paper is dedicated to develop an alternative coordinated scheme for multiple damping controllers and discuss the theoretical feasibility. To obtain the most effective signal (with global observability) to achieve a more efficient inter-area damping control, remote signal measured by phasor measurement unit (PMU) and transmitted by wide-area measurement system (WAMS) network should be input to POD. The potential of coordinated control of local conventional PSSs and PMU-based novel wide-area controller, for instance, SVC POD or DFIG-based wind farm POD, is able to simultaneously suppress both local and inter-area low frequency oscillations. The literature survey [
27] summarizes that there are considerable researches on damping control by a single type damping controller in power system integrated with wind power generation, whereas less attention has been paid for coordinated tuning of multiple damping controllers, especially in a wide-area measurement scenario. Reference [
28] presents a new two-level hierarchical wide-area control strategy, which contains a variable speed permanent magnet synchronous motor (PMSG)-based wind farm and a static synchronous compensator (STATCOM), to provide frequency support and inter-area oscillation damping capability. An optimization-based sequential design strategy is proposed in [
29] to coordinate multiple local PSSs and one wide-area high voltage direct current (HVDC) stabilizer, and the overall system stability is greatly enhanced. Reference [
30] presents a genetic algorithm-based damping control parameters turning methods of DFIG type wind generators, the system damping is improved under various wind speed conditions. The coordinated control of DFIG POD and local PSSs to damp power system oscillations is investigated in [
31], and the parameter optimization problem of the damping controllers considering system uncertainties is solved by an improved firefly algorithm.
A simultaneous robust coordinated multiple damping controllers design strategy is presented in this paper to suppress local and inter-area low frequency oscillation modes and enhance power system dynamic stability through simultaneously optimizing multiple local PSSs and wide-area signal based SVC device and wind farm additional PODs. A classical lead-lag type POD is adopted in this coordinated design strategy. The joint modal controllability/observability index is employed to choose the most appropriate wide-area feedback signals for PODs [
32]. The coordinated design strategy is addressed as an eigenvalue-based optimization problem [
33]. The recently proposed Grey Wolf optimizer (GWO) algorithm is used to optimize the optimum parameter values of damping controllers.
This paper is organized as follows: the mathematical models for the studied power system integrated with SVC, wind farm and its controllers, including PSS and POD, are introduced first. Then, the selection method of the best wide-area feedback signals for each POD, the eigenvalue-based optimization problem, the GWO algorithm, and the parameter optimization design procedure for the coordinated multiple damping controllers are depicted. Moreover, the linear modal analysis and nonlinear time-domain dynamic simulation of two modified benchmark test systems with and without the optimized coordinated damping controllers under a variety of scenarios are demonstrated later. Finally, the conclusions are given.
4. Case Study of Two-area Kundur Test System
To verify the feasibility and effectiveness of the presented coordinated multiple damping controllers design strategy and optimization algorithm, a comprehensive case study is implemented on a modified classical two-area Kundur test system. Firstly, there is no PSS and POD controller equipped in the system. Secondly, only local PSS is used to improve oscillation mode damping. Thirdly, supplementary controllers (PODs) of SVC and DFIG are adopted. The proposed coordinated design strategy enables local PSSs to cooperate with wide-area PODs to damp out local and inter-area electromechanical oscillations.
PSAT 2.1.8 and Matlab 2014a programs are employed in this study to perform the optimization process of damping controller parameter design, system eigenvalue analysis, as well as dynamic time-domain simulation [
41]. The initial parameter settings of GWO algorithm are: the number of search agents is 50, the number of iterations is 100, the dimensionality of search variables depends on the number of controllers (PSSs and PODs), while each controller corresponds to three search variables.
4.1. Study System
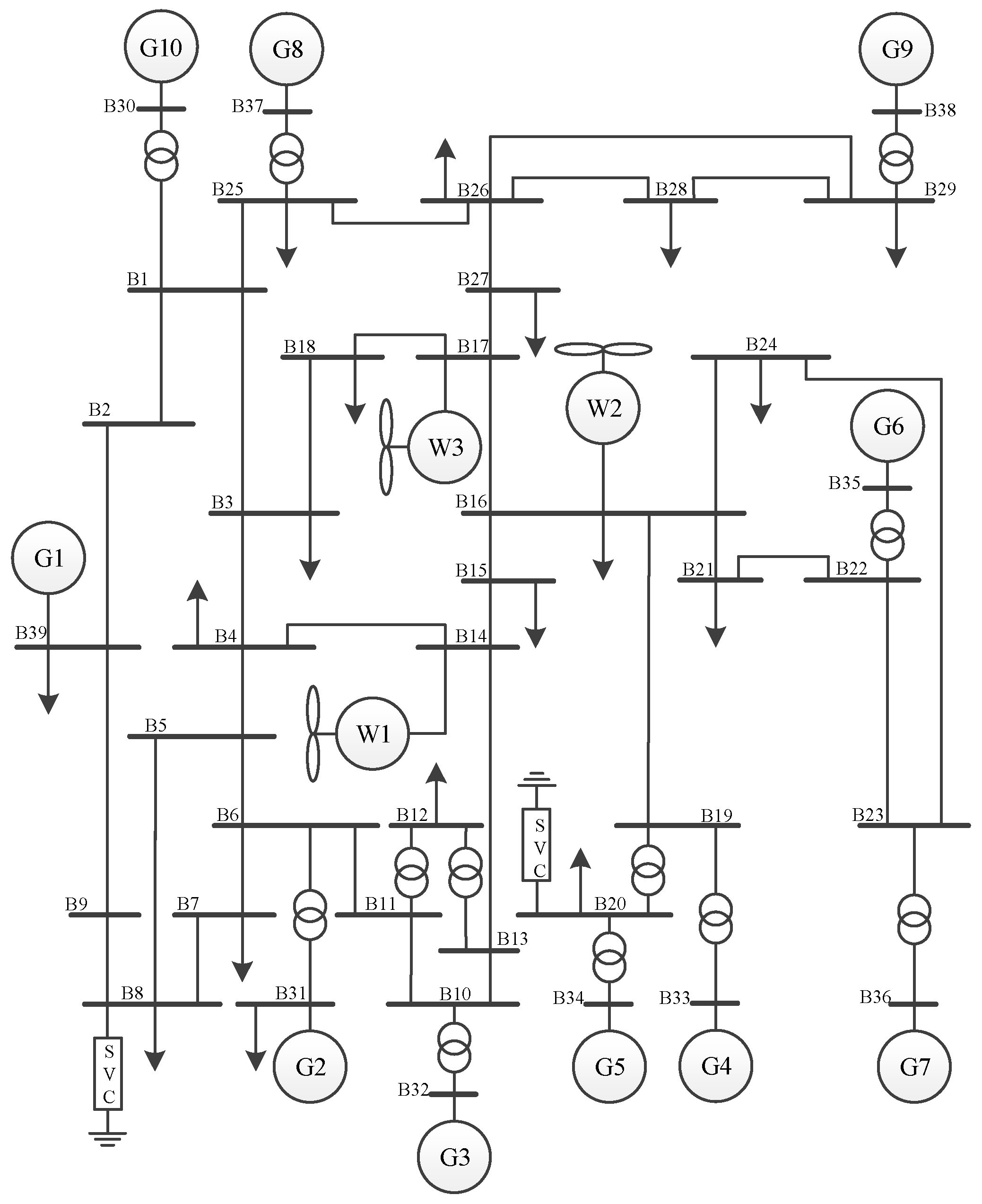
A system single line diagram shown in
Figure 7 is modified from the classical two-area Kundur test system, which is a classically used study system for small signal stability analysis and damping control design of power system. In this approximate symmetrical system, not only local but also inter-area oscillation modes can be distinctly observed. The original data of the network and synchronous generators can be found in [
34]. All of the four generators are described by 6-order dynamic models and IEEE Type-ST1 simple static excitation system are installed. WG represents a 100 MW (or 50 with 2 MW each) DFIG based wind farm and is integrated into the system at bus 6 of area 1. A 200 MVar SVC equipped at the middle of the interconnection line 7–9 is utilized to enhance the system voltage stability, and meanwhile, improve the power transmission capacity.
To verify the superiority of the proposed coordinated design strategy, four scenarios are assumed as follows:
- (1)
The test system without PSS and POD;
- (2)
The test system with PSSs only;
- (3)
The test system with PSSs and SVC POD;
- (4)
The test system with PSSs, SVC and DFIG POD.
To strengthen the robustness of the proposed coordinated design strategy, three power flow operating conditions are considered during the optimization procedure. The active power transfer from area 1 to 2 are about 380, 480 and 580 MW, representing the light, normal and heavy inter-area power flow transmission condition, respectively.
4.2. Eigenvalue Analysis without Controllers and with PSSs Only
Eigenvalue analysis under three transmission power levels of the tie lines reveals that the studied system is unstable if there is no damping controller. As listed in
Table 1, there are four electromechanical oscillation modes, including two local oscillation modes with low damping ratio, one unstable/critical stable inter-area oscillation mode (Mode 3 is in bold font in the table), and one additional poorly damped global oscillation mode corresponding to DFIG wind farm and all of the synchronous generators. It can be discovered that the integration of DFIG-based wind farm in power system introduces an additional underdamped oscillation mode M4.
When the system undertaken is only equipped with two local generator rotor speed feedback PSSs at G1 and G3 and without any wide-area POD, the results of the electromechanical oscillation modes obtained by modal analysis are listed in
Table 2. Obviously, all of the four oscillation modes’ damping ratios are improved, and the damping ratios of two local modes are larger than 20% under all of the three operating conditions, so the local mode oscillations can be well damped by two PSSs. However, the critical inter-area oscillation mode M3 (bold in the table) is still low damping (
ζM3 ≈ 7.5%) under all of the three operating conditions. The damping ratios do not meet the expected requirements of 20%.
4.3. Eigenvalue Analysis with PSSs and SVC POD
When SVC POD is considered in this system, the suitable input remote signal needs to be selected first. Modal analysis is applied to the linearized two-area test system to obtain the geometric measures of
COBI. The
COBI results with respect to SVC of all lines’ active powers for two inter-area oscillation modes are shown in
Figure 8. We can see from the histogram in
Figure 8 and find that the active power in line 8–9 has the highest observability of both two inter-area modes, therefore, the best wide-area feedback input signal for SVC POD is the active power in line 8–9.
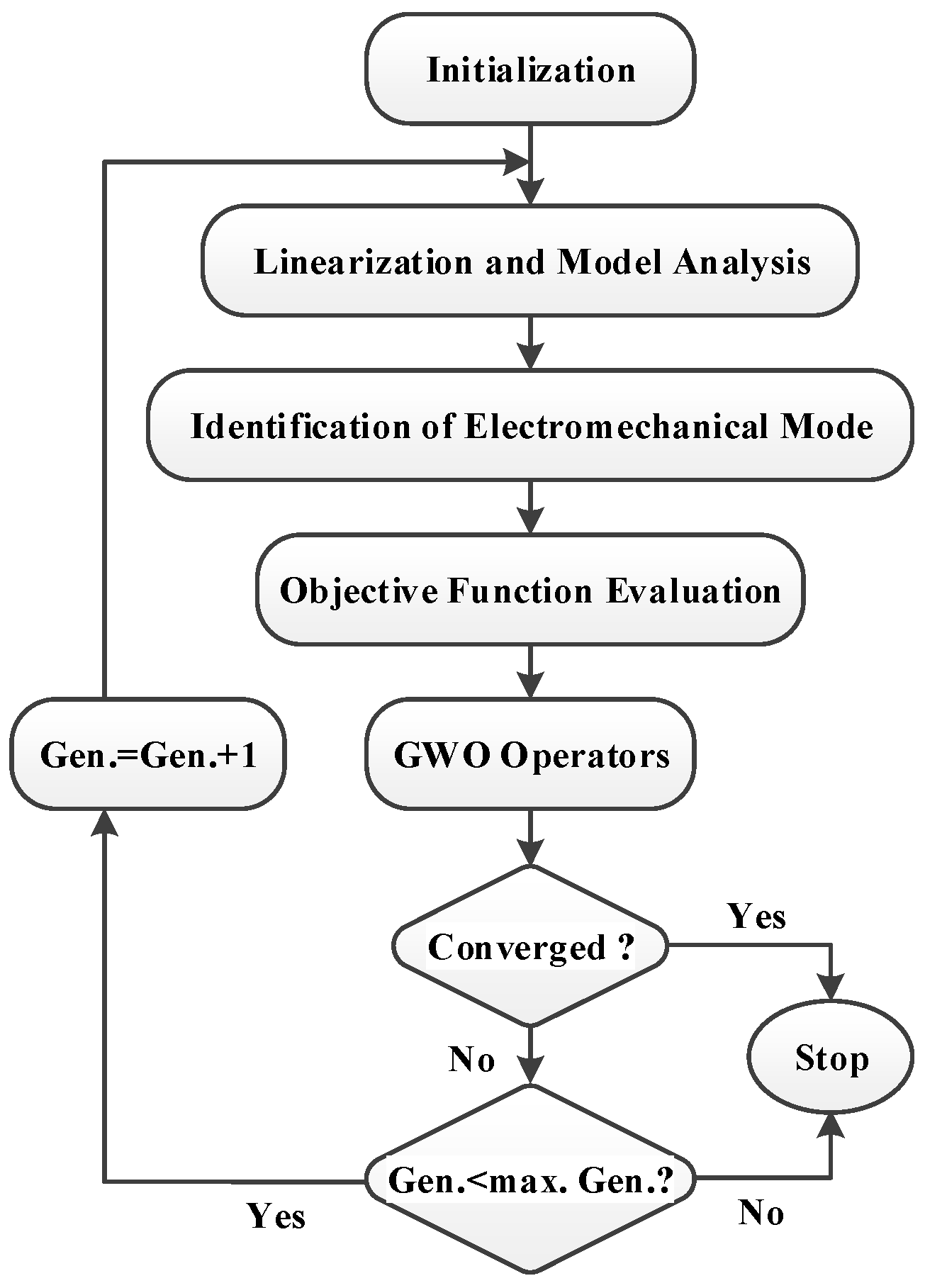
The GWO algorithm proposed in
Section 3.3 is adopted to realize a coordinated tuning of PSSs and SVC POD parameters. The dimension of the optimization problem is 9 for two PSSs and one SVC POD. After the optimization process, the parameters are obtained and listed in
Table 3. As the modal analysis results shown in
Table 4, all of the four oscillation modes’ damping ratios are increased by the coordinated PSSs and SVC POD, especially, those of the two inter-area oscillation modes.
4.4. Eigenvalue Analysis with Simultaneous Coordinated PSSs, SVC POD and DFIG POD
As aforementioned, the simultaneous coordinated PSSs and wide-area PODs are implemented in the two-area test system by the proposed design strategy. The wide-area feedback signal of SVC is selected as former subsections according to the indicator of
COBI. The
COBI results with respect to DFIG of all lines’ active powers for two inter-area oscillation modes are depicted in
Figure 9. We can find that the active power in line 5–6 has the highest modal observability of critical inter-area oscillation modes M3. Thus, the active power in line 5–6 is considered as the most effective wide-area feedback input signal for DFIG POD.
The dimension is 12 for two PSSs and two PODs. The controller parameters of coordinated PSSs and wide-area PODs are optimally tuned under three operating conditions as given in
Table 5. And
Table 6 shows the modal analysis eigenvalue results of all three operating conditions. It can be seen from
Table 6 that all of the four low frequency oscillation modes’ damping ratios are greatly enhanced in comparison to that with no PSS and POD. What is more, the damping ratio of critical inter-area oscillation mode M3 are further improved in comparison to former two damping control strategies as discuss in
Section 4.3 and
Section 4.4. Therefore, according to above analysis results, we concluded that the coordinated parameters design of multiple damping controllers can achieve better damping performance.
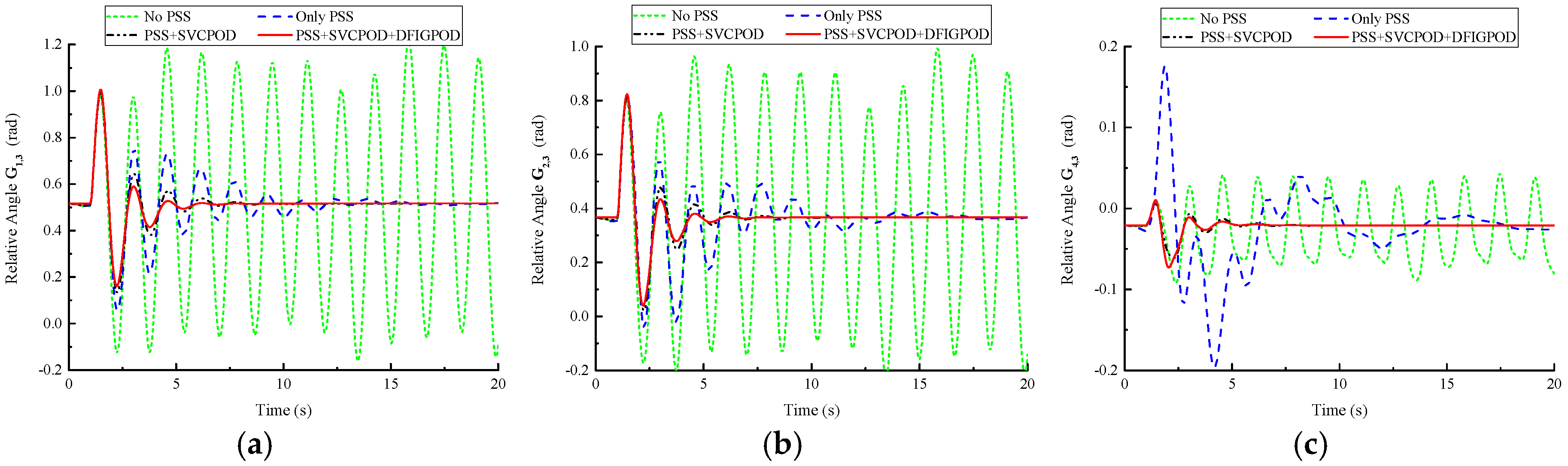
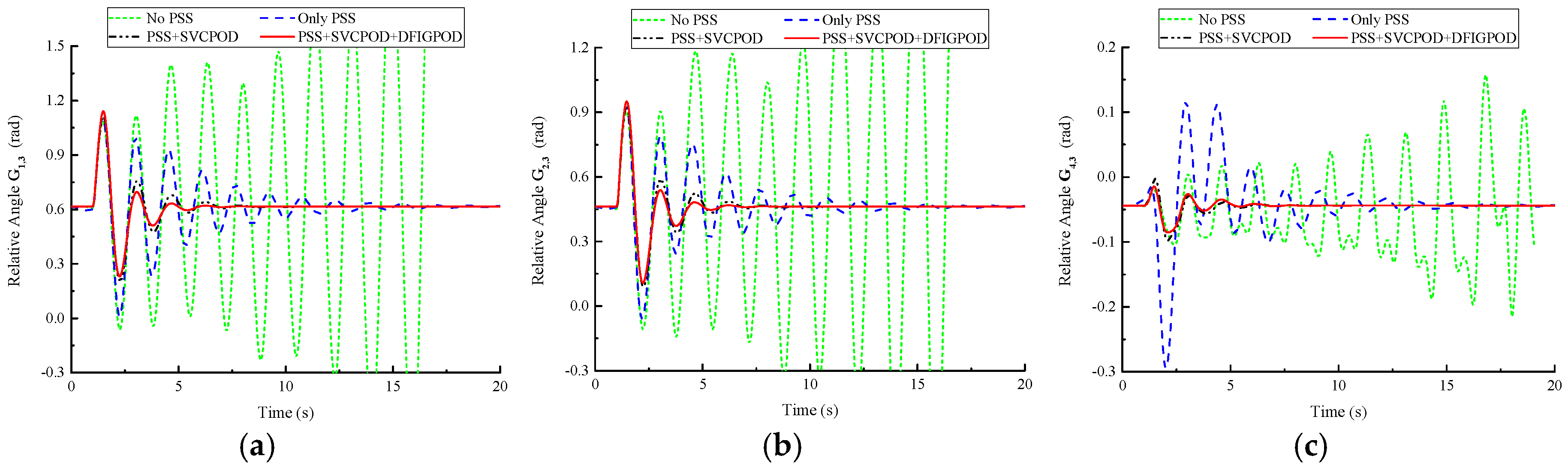
4.5. Nonlinear Time-Domain Simulation
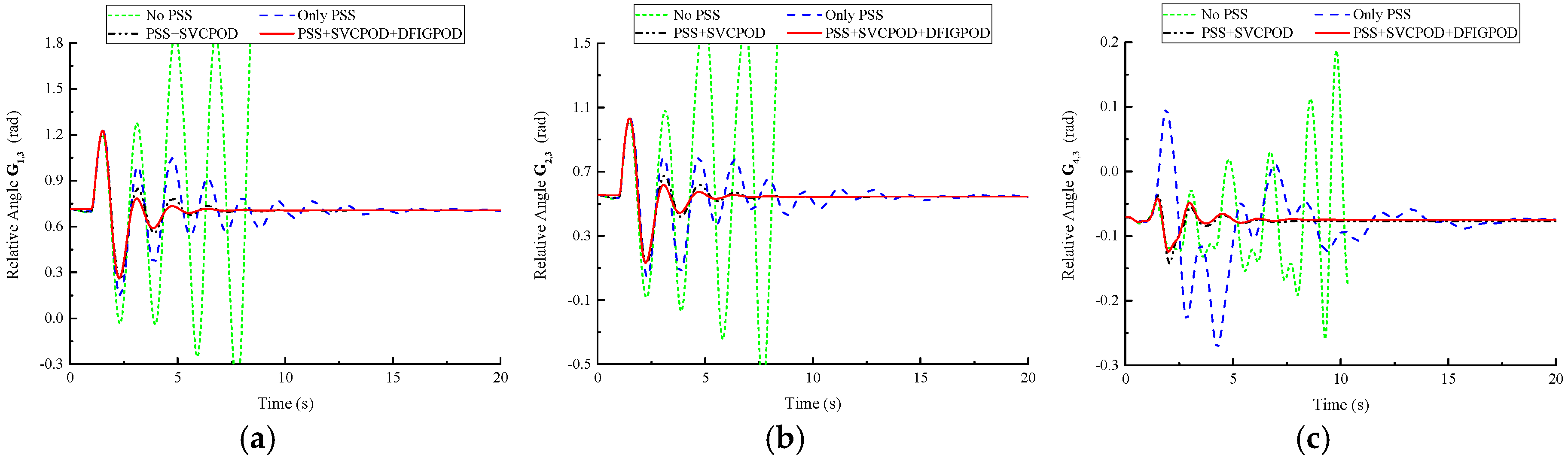
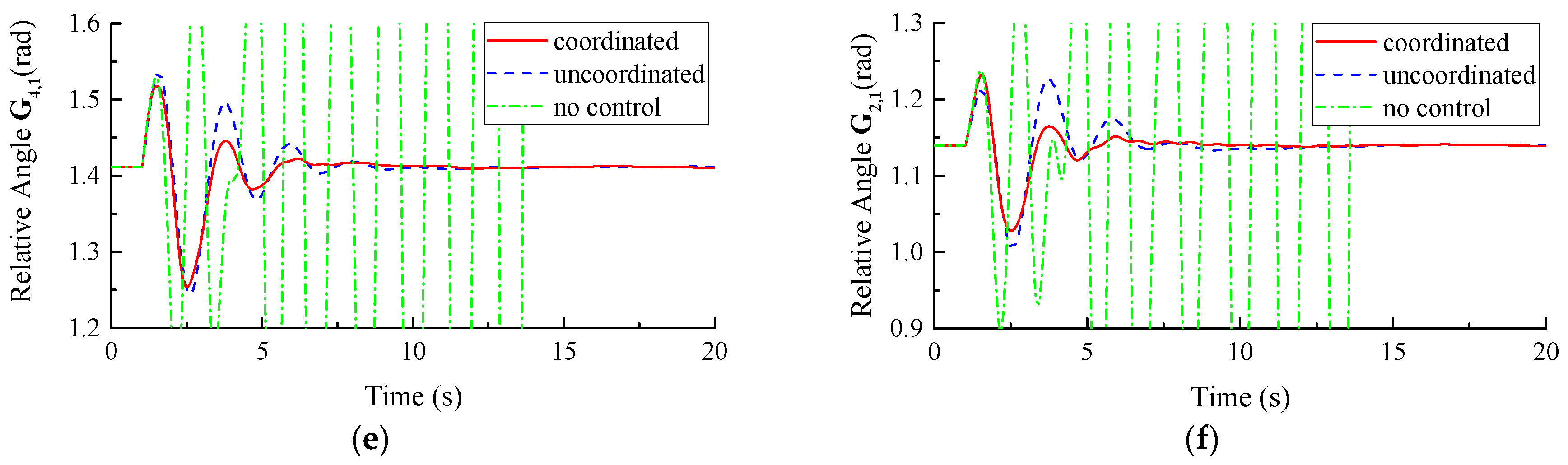
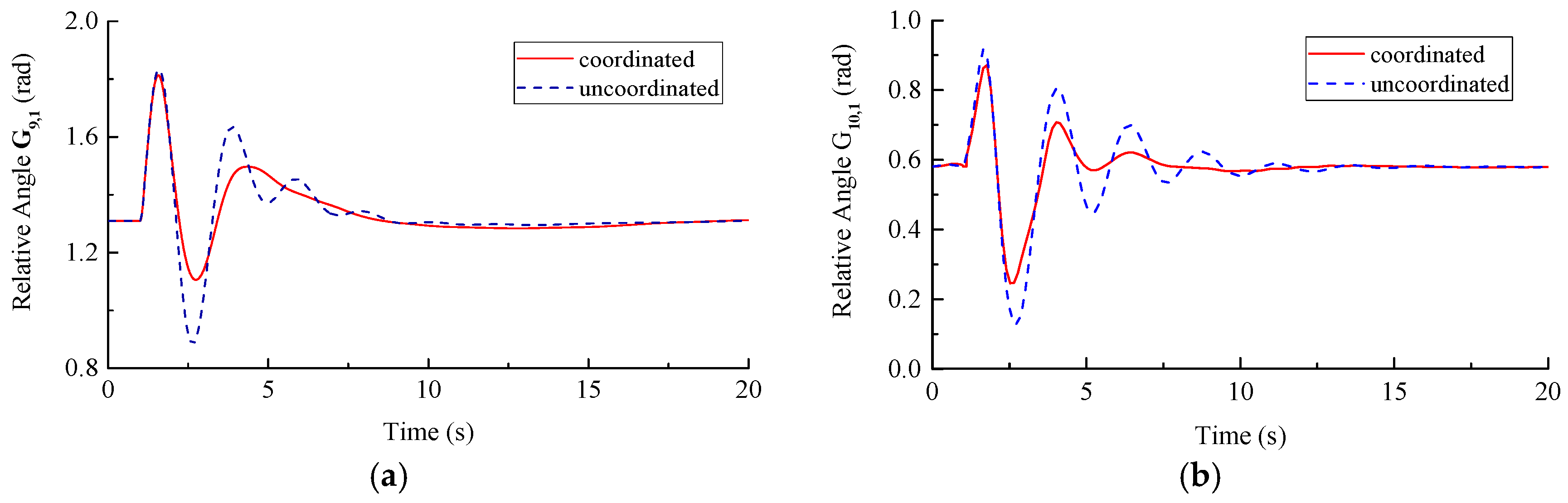
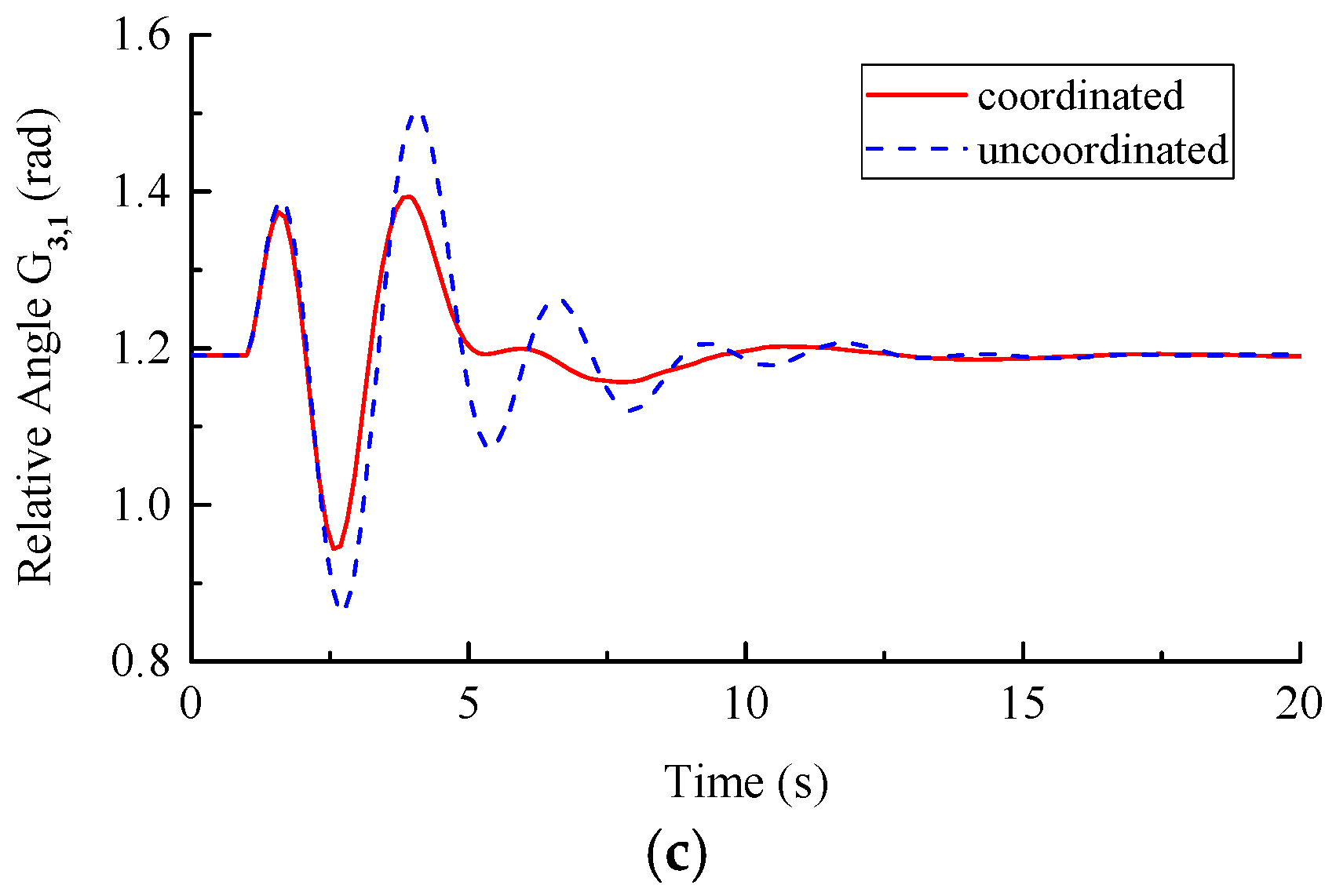
To further verify the damping performance of the proposed coordinated design strategy in this paper, nonlinear time-domain simulations under the above four damping controller situations and three operating conditions are carried out by PSAT. A 3-phase fault is applied to the two-area test system at bus 7. It is assumed that the fault duration is six cycles (100 ms) and the fault is cleared without any topology change. In all the three operating conditions, the loads are regarded as PQ type.
The power angle differences of generators G1, G2 and G4 with respect to generator G3 under light, normal and heavy conditions are described in
Figure 10,
Figure 11 and
Figure 12, respectively. From these figures, the relative power angle low frequency oscillations can be damped out more or less by all of the three damping controller strategies. The simultaneous coordinated damping control design strategy achieves the satisfying damping effect with three power flow scenarios under consideration. The oscillations of disturbance dynamic response are effectively restrained in a very short time. Time domain simulation results are in accord with the previous eigenvalue analysis. Furthermore, the proposed coordinated design strategy is robust under all of the three operating conditions.
It is noteworthy that no much difference exists between the “PSS SVCPOD” and “PSS SVCPOD DFIGPOD” cases. That’s because the whole system dynamic response is determined by the combined action of multiple controllers, such as AVR, PSS, and POD, and the damping effect of DFIG POD may not be obviously reflected in the disturbance response. Moreover, the system is already a relatively strong damping under the action of PSS SVCPOD, as shown in
Table 4.
4.6. Robustness Analysis
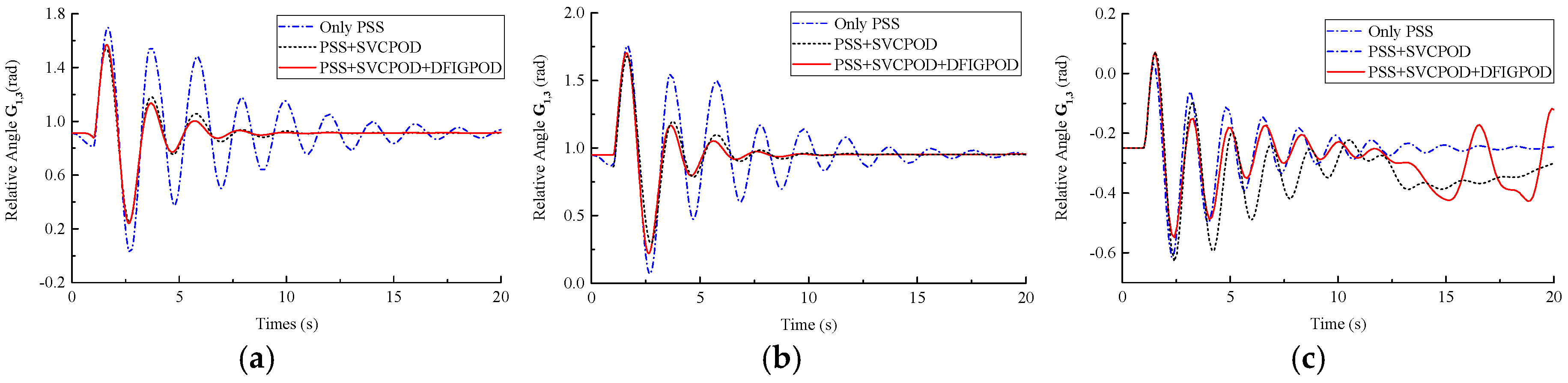
To further evaluate the robustness of the proposed coordinated design strategy of multiple damping controllers, line outage or power flow reversing scenarios are considered in this two-area test system. The fault is the same as that in the previous simulation. Three scenarios are:
- (1)
Line 7–8 outage;
- (2)
Line 8–9 outage;
- (3)
The tie-line 7–9 active power is about −310 MW.
The relative power angle with respect to three system operating scenarios are given in
Figure 13. It can be seen from the relative power angle oscillation curves that the proposed coordinated multiple damping controllers design strategy has much better dynamic performance than other damping control strategies under the scenario 1 and 2. However, the system is unstable when the tie-line power flow orientations change, just like scenario 3. That’s because the input signal of SVC POD is from the active power of tie-line 8–9. When the tie-line power flow reverses, the sign of the input signal is changed, and the system damping will degenerate greatly and even become negative. Therefore, the coordinated control strategy is robust under most kinds of power flow operating conditions and topological changes. But, it may become invalid if the system undergoes some thorough change, for example, power flow reversal of tie lines, as demonstrated in
Figure 13c. Under such a circumstance, online adaptive coordination design [
42,
43,
44] should be adopted to recover the validness of the strategy.
When the operation mode of the studied system is changed greatly, the POD controllers’ parameter values are switched to other sets of values, which are optimized off-line and matched with the considered operating condition. Based on this “off-line parameters optimization and on-line real-time matching” mechanism, the coordinated control strategy is more robust and the system has strong stability under various operating conditions.
6. Conclusions
This paper investigates the potential of coordinating multiple damping controllers, including PSS, SVC POD and DFIG POD, to damp out both local and inter-area low frequency oscillation modes in multimachine power systems. The parameter optimization of the fixed-structure lead-lag type PSS and POD is carried out simultaneously. Joint modal controllability/observability index is utilized to select the most appropriate wide-area feedback signals for PODs. To tune the optimal damping controller parameters, a GWO algorithm is employed to efficiently search for the eigenvalue-based parameter optimization solution. Frequency-domain eigenvalue analysis and nonlinear time-domain dynamic simulation studies in two classical modified benchmark test systems verify the feasibility and effectiveness of the proposed coordinated multiple damping controllers design strategy in stabilizing power system electromechanical oscillations. The simultaneous coordinated damping control design strategy is far superior to those with only one or two types of controllers or uncoordinated controllers. By implementing the proposed design strategy, the DFIG wind turbine equipped with POD can coordinate well with other damping controllers for contributing to power network damping performance.
It is worth noting that the coordinated multiple damping controller design strategy suggested in this paper can be easily expanded to the design of various kinds of multiple damping controllers. However, it may have some difficulty in obtaining the optimization solution within a reasonable time, when the size of the studied power system is extremely large. The parallel computing technologies and intelligent optimization algorithms which are suitable for solving high-dimensional problems need to be developed. How to apply this to design strategy for a large system is an ongoing work. Moreover, the volatility and uncertainty of wind power induced by ungovernable wind speed further increase the complexity of the simultaneous coordinated damping controller design. Future research will also be focused on extending the proposed design strategy to handle the robustness problem for the stochastic uncertainty of wind farm integrated power system.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}