The two different feed-in management strategies can be assessed from two perspectives: from the power system’s point of view and from the WT’s point of view. Hence, the following subsections compare the effects that conventional and continuous feed-in management have on the power system and on the WT, i.e., the 5M.
4.1. Effects on the Power System
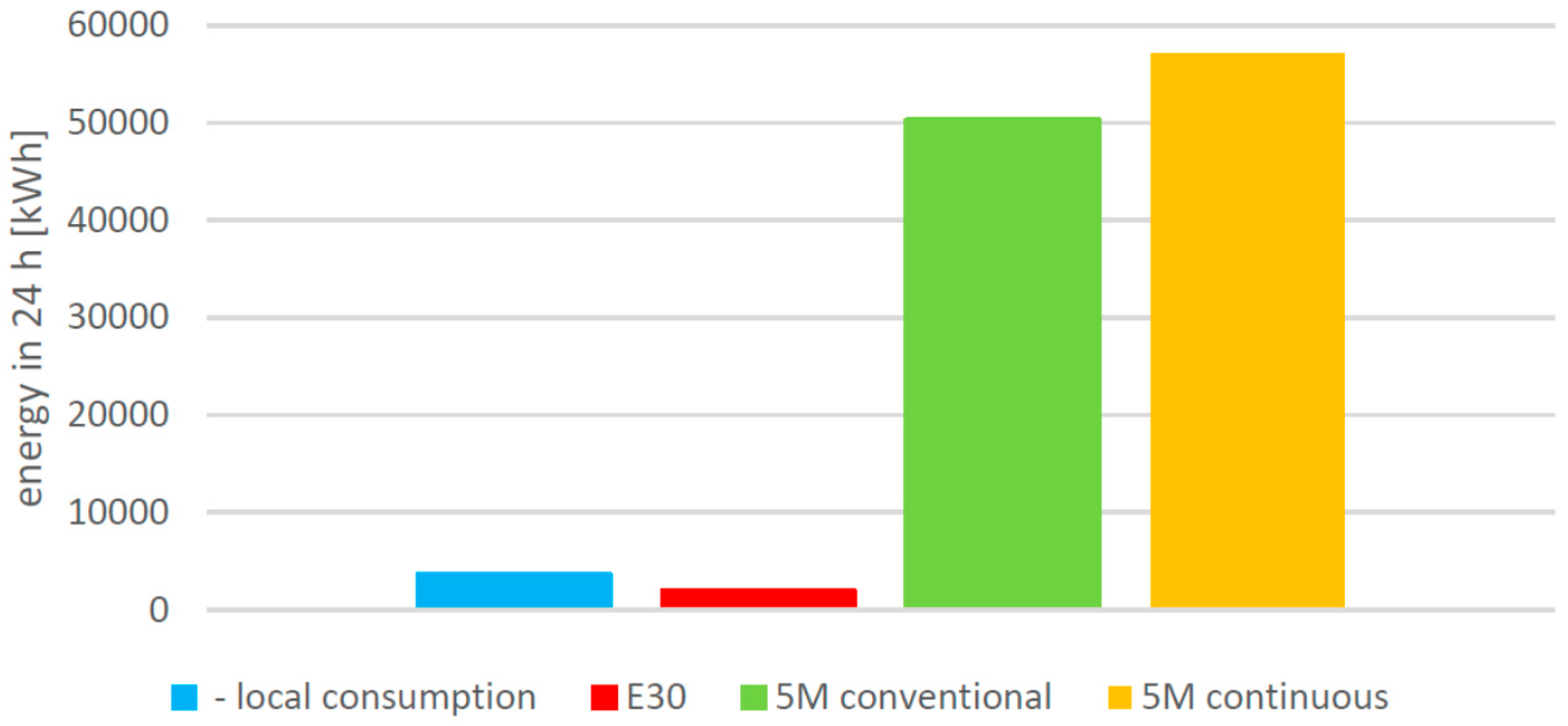
Since the primary purpose of wind power installations is the feed-in of electric energy, the energy yield is compared first.
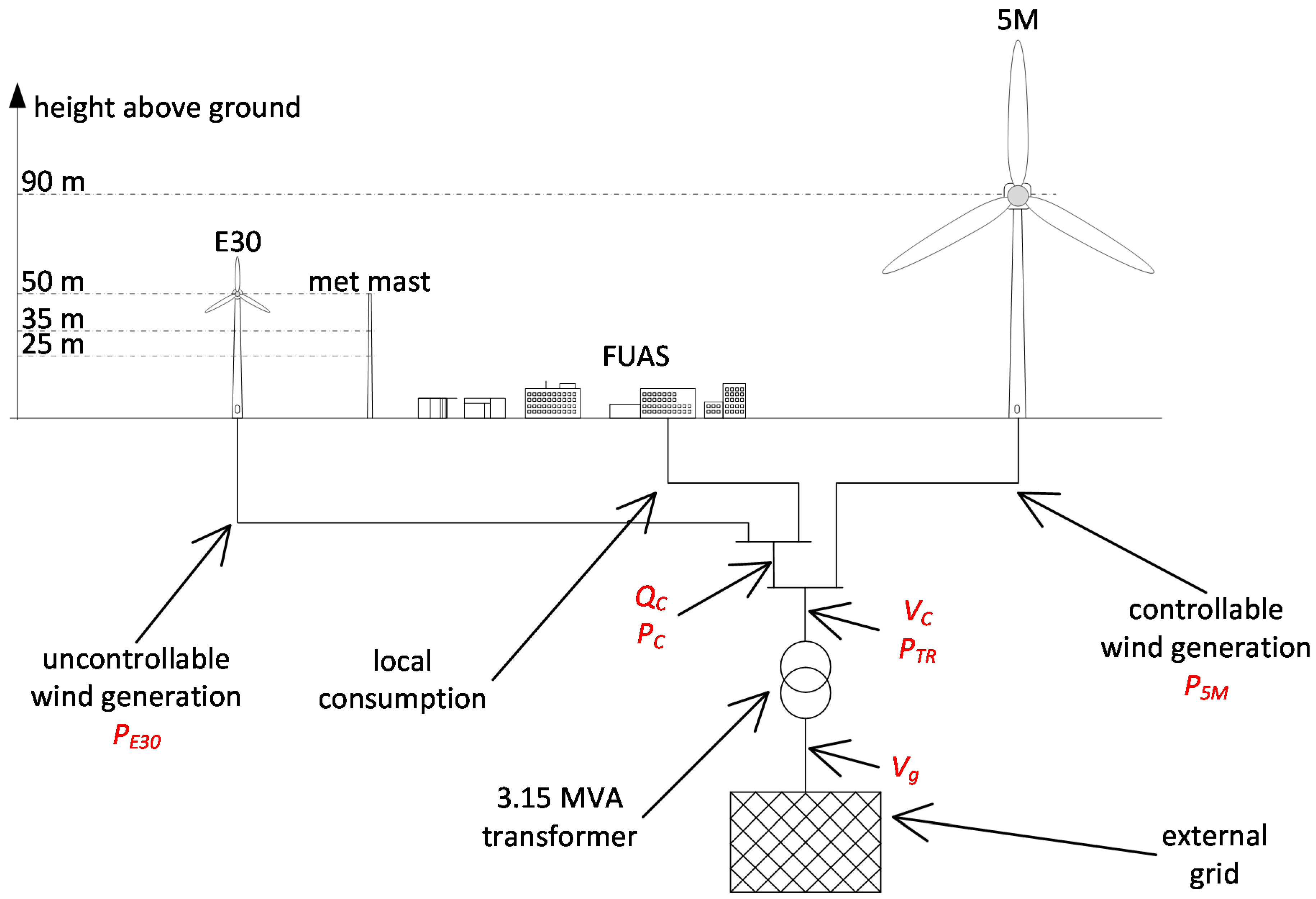
Figure 14 shows the energies that are fed into and consumed from the grid of campus Flensburg on 5 April 2017. The local consumption (3.67 MWh), which is partially provided by the E30 (1.97 MWh), is only a minor fraction of the energy produced by the 5M. Controlling the 5M with continuous feed-in management yields 57.1 MWh, which is 13.5% more than with conventional feed-in management.
It has to be pointed out however, that the numbers of MWh are not transferable to other cases as they apply only to the scenario considered here. These numbers do, however, allow the conclusion to be drawn that continuous feed-in management increases the energy yield substantially. The difference in energy yield would be even more striking were the voltage in the outer high voltage grid,
Vg, assumed to be higher. In this case conventional feed-in management would lead to
Pdem = 0.3 pu or even 0 pu most of the time. The same would apply when conventional feed-in management were to be conducted in the same precautionary manner, with the goal to minimise the control effort, as can be observed in reality [
16]. Continuous feed-in management, on the other hand, responds to the instantaneous changes in the grid voltage and limits
Pdem accordingly.
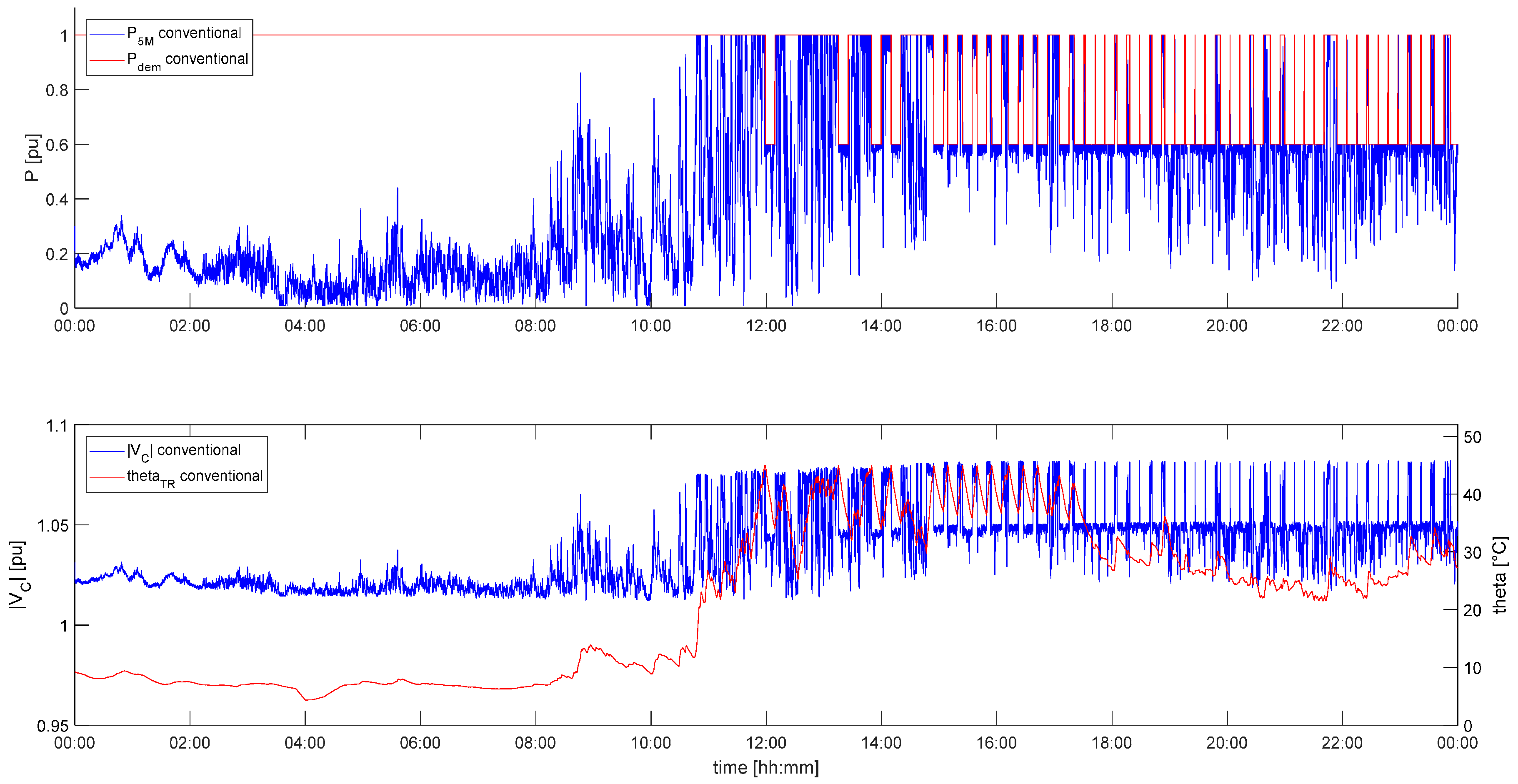
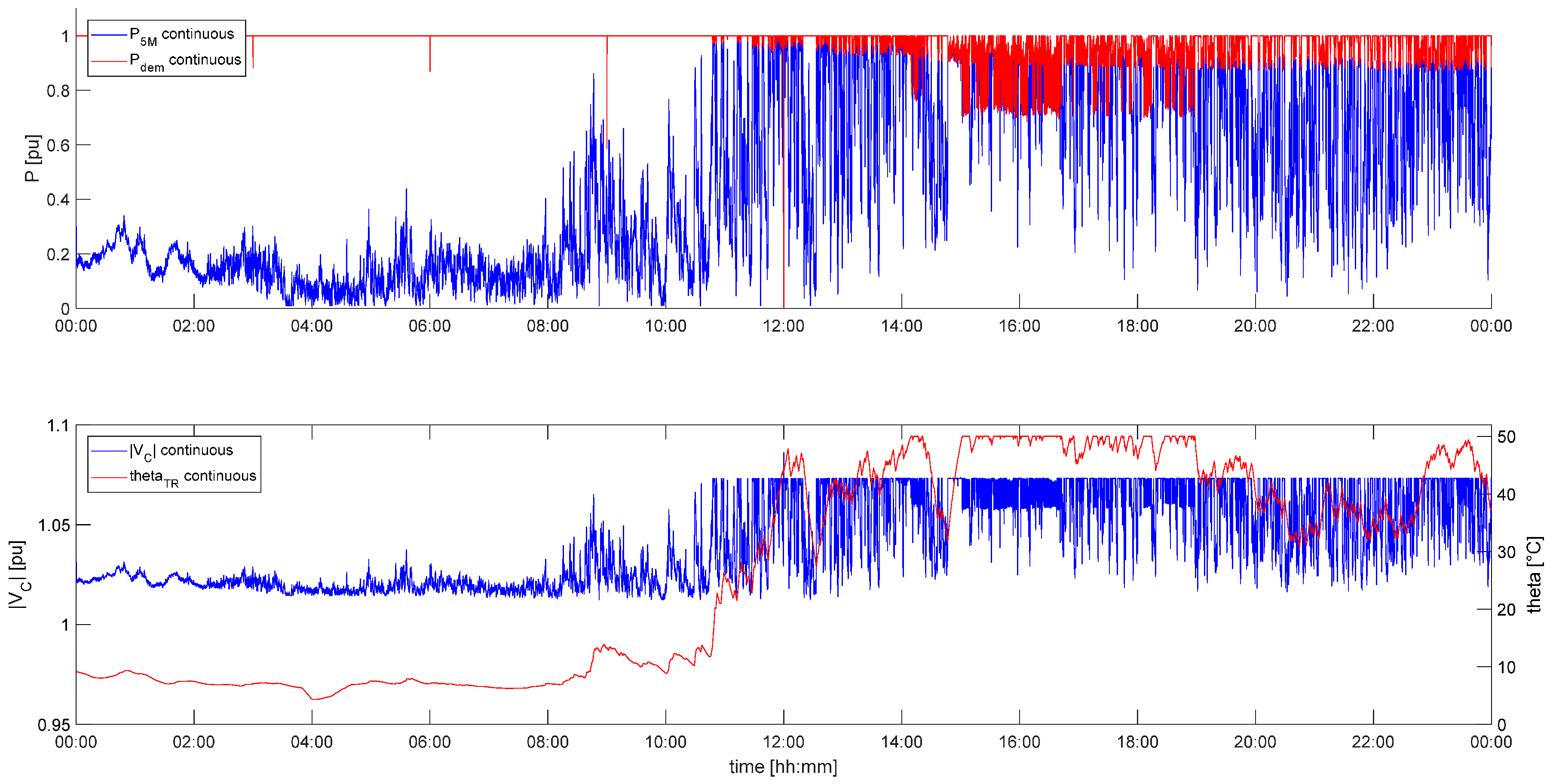
The thermal loading of the transformer is a measure for the utilisation of the same and of other assets in the power system. Comparing the transformer temperature after 12:00 (comparing
Figure 12 and
Figure 13) it can be seen that conventional feed-in management makes much more use of power system assets than conventional feed-in management. While continuous feed-in management keeps the transformer at its target temperature of 50 °C for several hours, in conventional feed-in management it barely reaches up to 45 °C.
The variability of VC is a measure of the quality of the power fed into the power system. Over the whole day the lowest value of VC is 1.013 pu. In case of conventional feed-in management it regularly reaches up to 1.082 pu. In contrast to this, there is only one single peak where VC reaches up to 1.086 pu while it is controlled with continuous feed-in management. At all other times continuous feed-in management limits VC reliably to 1.073 pu.
4.2. Mechanical Loads in the WT
In power production operation a WT can experience excitation from four external sources: rotation, varying wind, varying terminal voltage, and varying
Pdem. Controlling
Pdem with respect to the loading of the power system to which the WT is connected, means decoupling the controls of the WT from the wind that instantaneously prevails at the rotor of the WT. This potentially means stress for the WT [
8]. Such stress can be associated with two different categories:
Vibrations are primarily excited by excitations that have the same frequency as the eigenfrequency of the vibrating WT component. Single excitation events, like a step change in a signal, are less harmful as they usually do not cause vibrations of constant or even increasing magnitude. It has to be noted that such single events might cause extreme loads that are not related to resonances, but such extreme events are not caused by feed-in management operation. Therefore, the persistent excitations to vibrations are assessed as follows. As discussed in
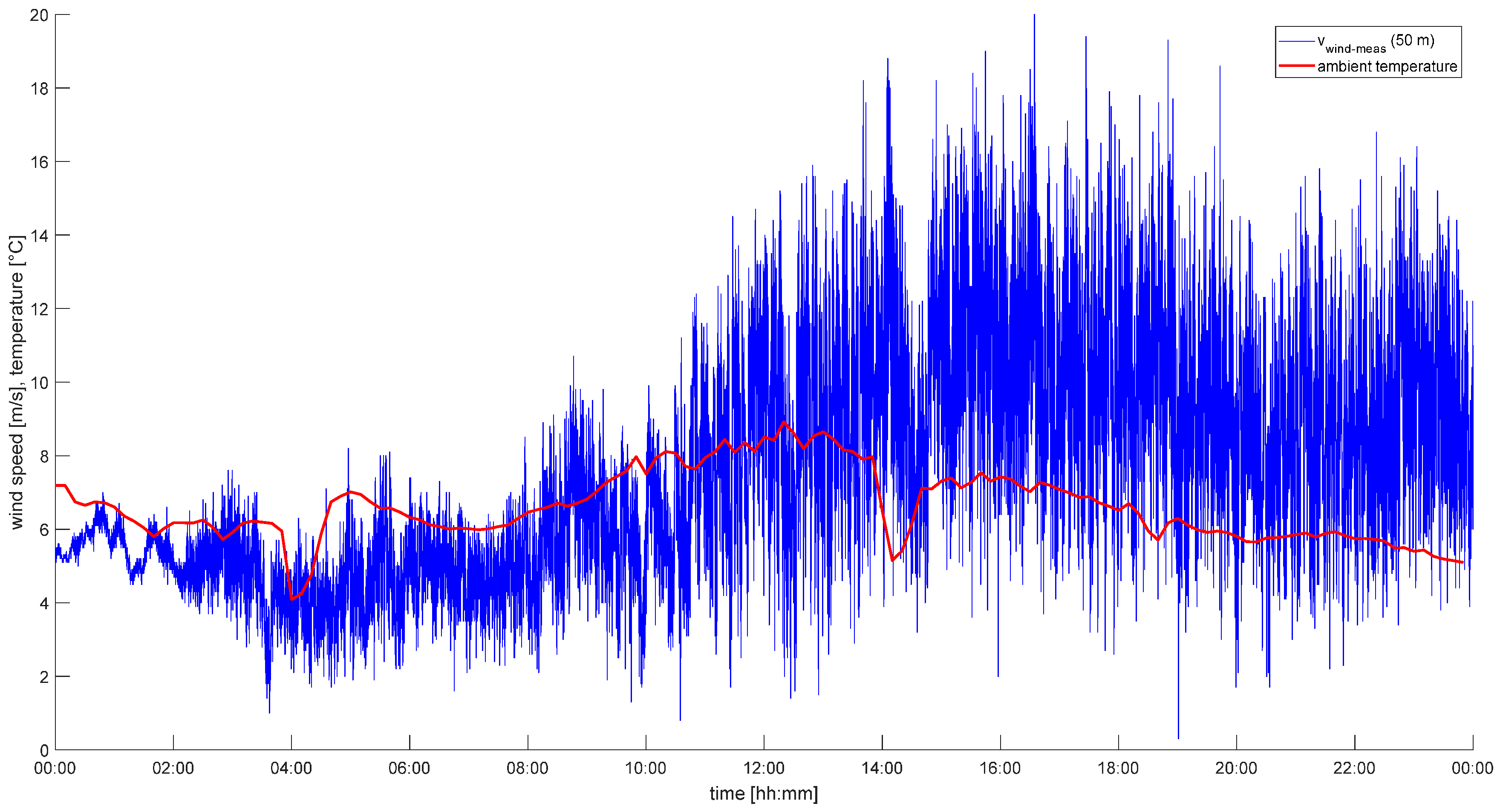
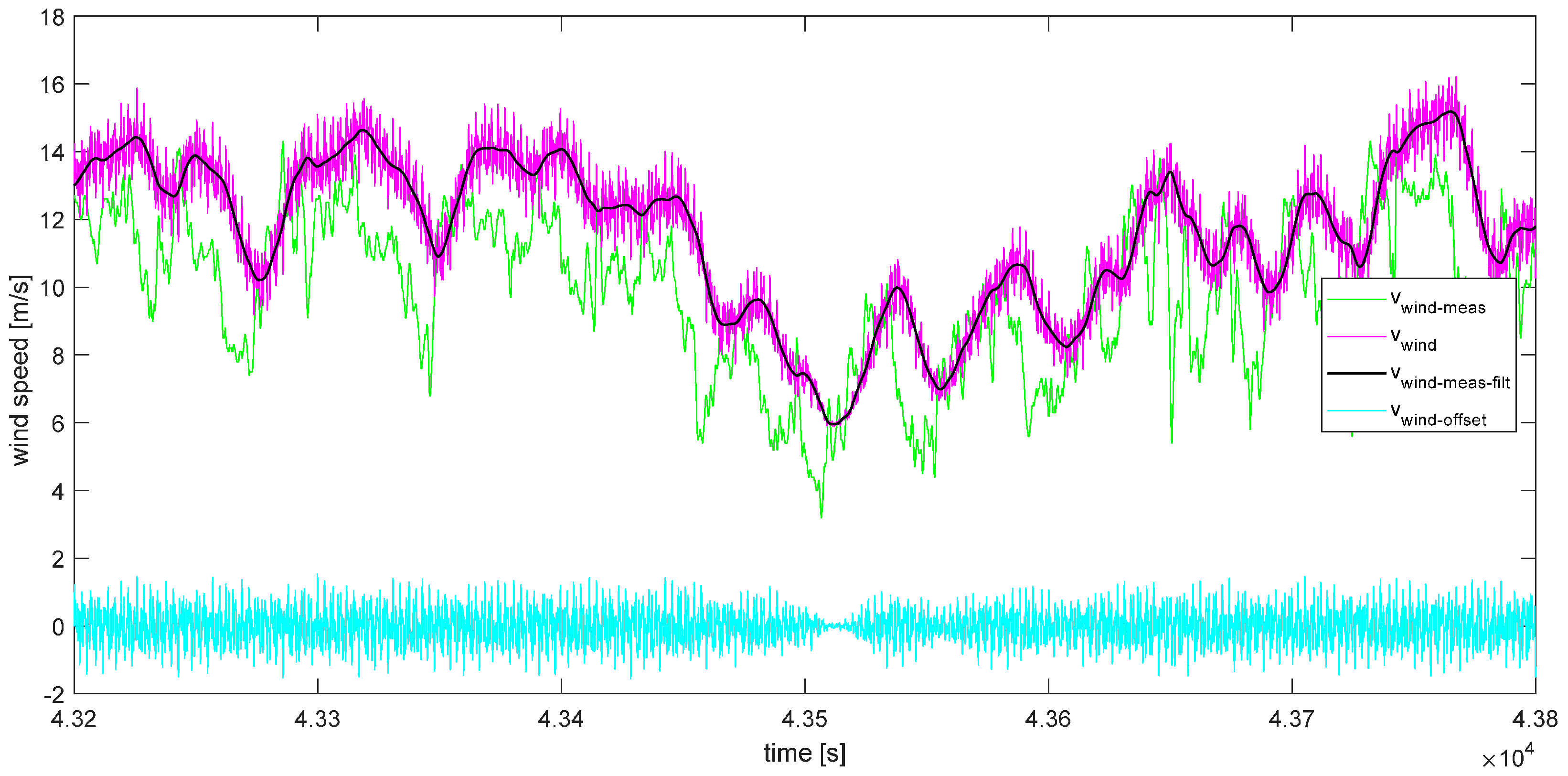
Section 2.6 “Wind Model”, the wind speed time series is offset with sinusoidal components that are of the same frequencies as the eigenfrequencies of the WT components. Hence, in addition to the stochastic natural wind speed variations, there are also wind speed variations that are directly targeted to excite the 5M to vibrations, see
Figure 9. In the scenario simulated here the voltage (
VC) has no significant effect, as it varies in a too narrow band. The other source of excitation is the
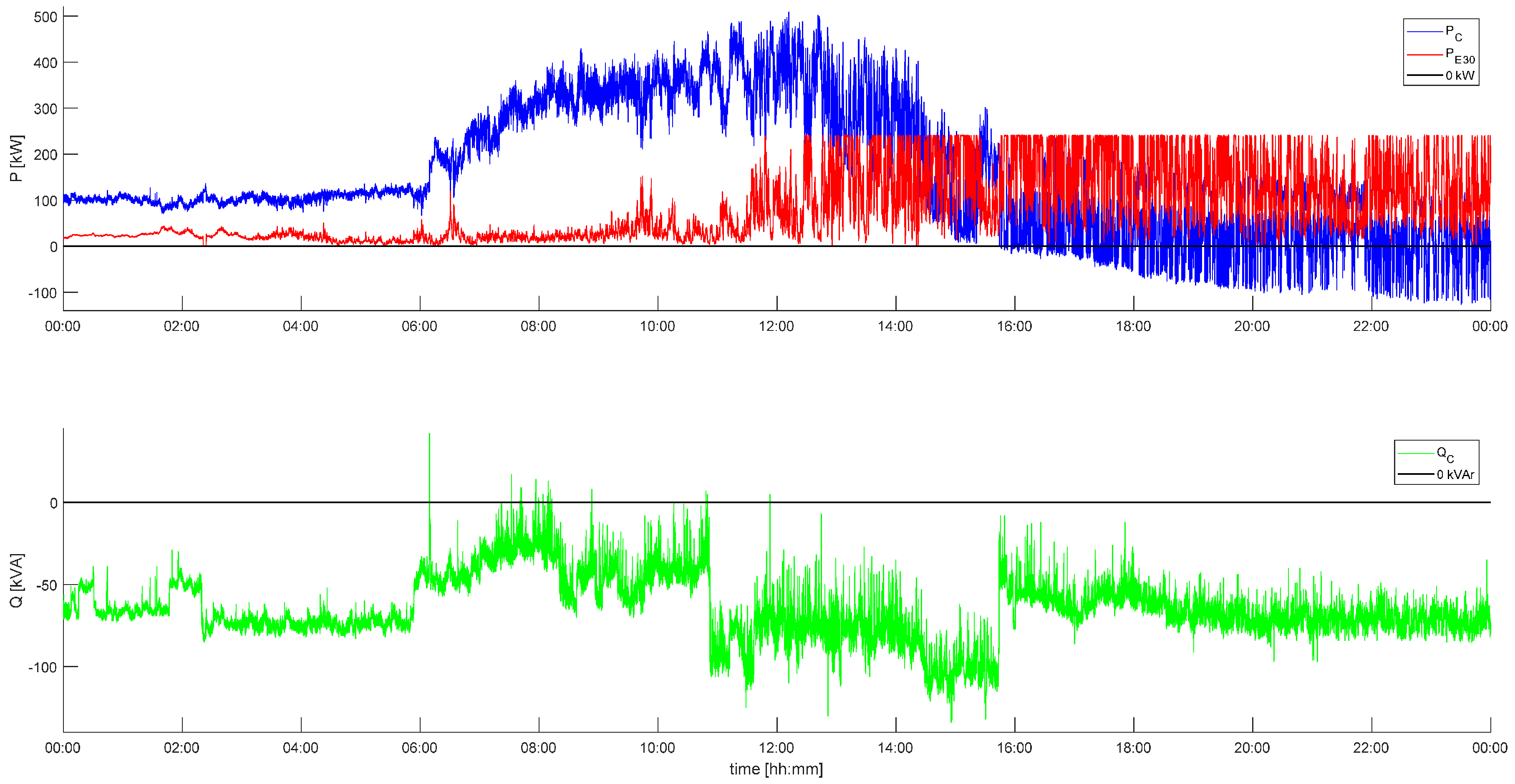
Pdem signal that results from the loading of the transformer. Hence, it is affected by the wind speed at the E30,
vwind_meas, which leads to
PE30, and together with the load power these add up to
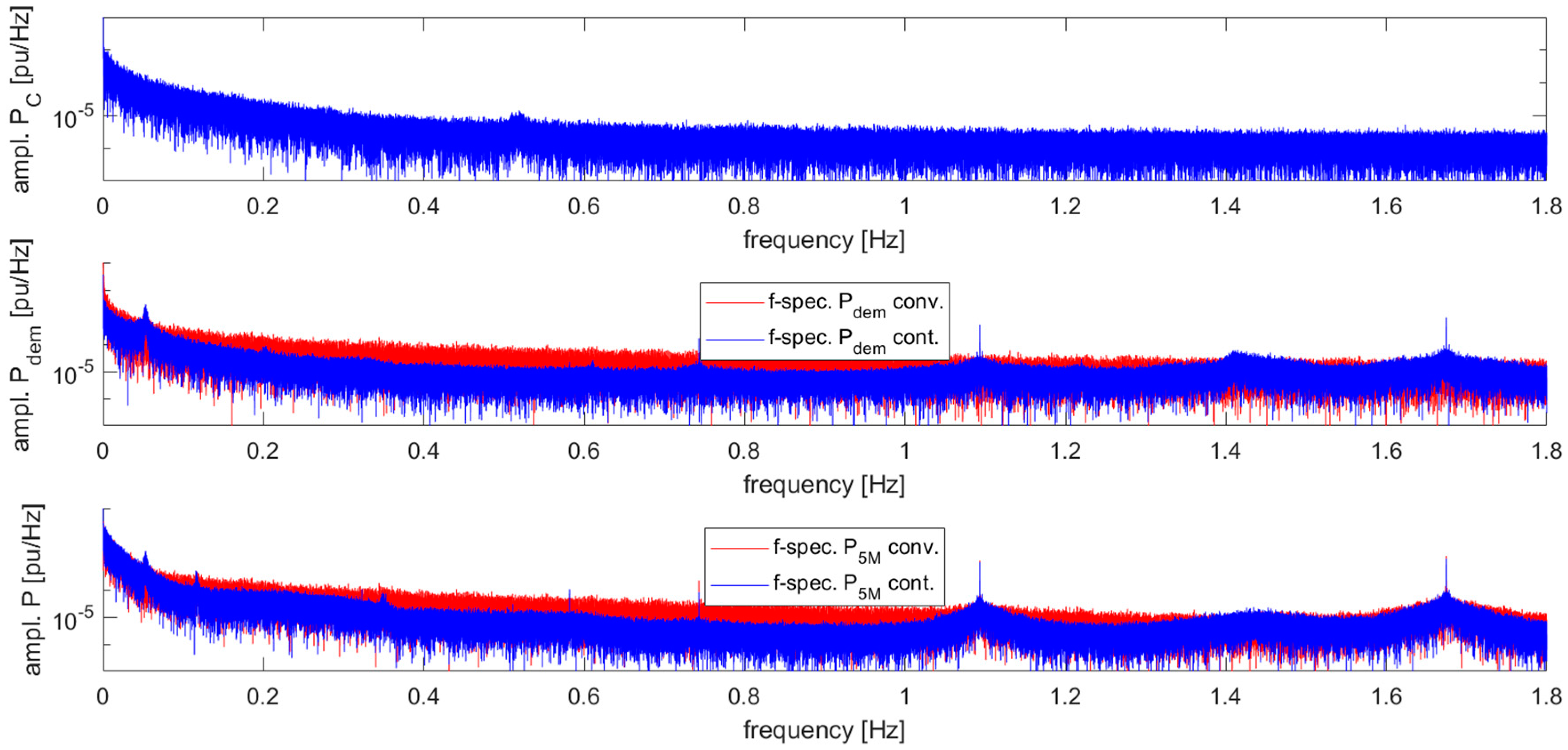
PC. In order to assess the potential to excite vibrations in the 5M,
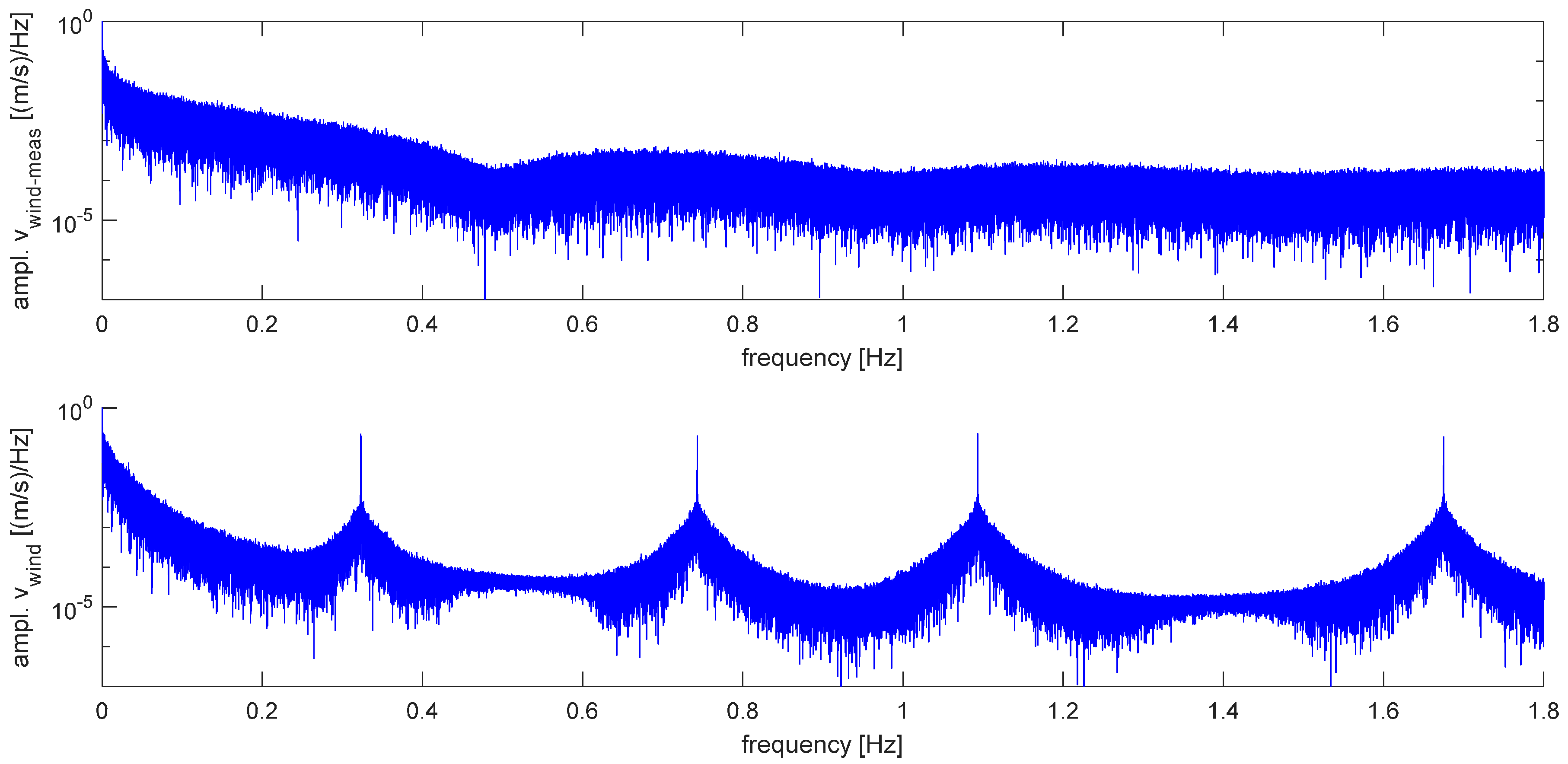
Figure 15 shows the frequency spectra of the different power signals. The frequency spectrum of
PC comprises all relevant frequencies but does not exhibit any particular frequency peaks. The same applies to the
Pdem signal of conventional feed-in management. The
Pdem signal of continuous feed-in management comprises distinct frequencies that result from the heating up of the transformer and from the eigenfrequencies of the WT. Looking at
Figure 10 it becomes obvious that the dynamics of both, the transformer, as well as the 5M, have a bearing on
Pdem of continuous feed-in management. Consequently, these frequencies are reproduced in the power that the 5M feeds into the power system. In contrast to this, in conventional feed-in management the generator power of the 5M only exhibits the eigenfrequencies of the blades in the edgewise direction and the torsional eigenfrequency of the drive train. It barely exhibits the eigenfrequency of the blade in the flapwise direction and it does not exhibit the eigenfrequency of the tower of the 5M.
With these excitations the dynamic behaviour of the WT can be assessed. In the following figures, time traces are limited to the part of the day where feed-in management takes place. The units of the signals shown in some of the following graphs are per unit (pu), which relates to the rotational speed of the rotor. A detailed discussion of the units is omitted here, as this can be found in the documentation of the simulation model [
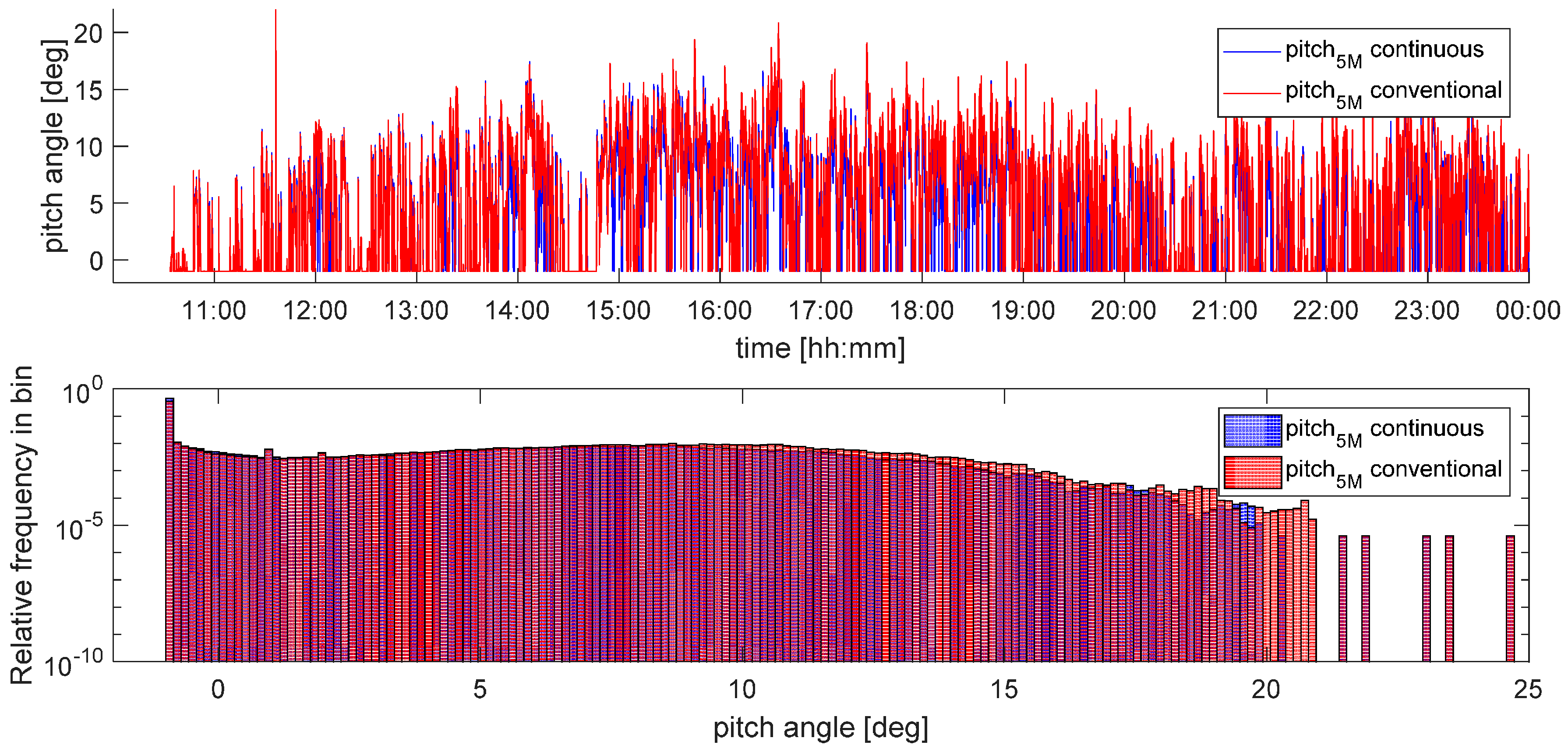
10]. The following figures also show the distribution of the frequencies with which the different values occur in the time traces. (Blue bars are for continuous feed-in management, red bars are for conventional feed-in management and dark red areas show overlap of blue and red bars.)
Figure 16 shows that the pitch angle of the 5M varies in the same range in both cases. There are differences in the frequency distribution for pitch angles above 10 deg, which should not be overrated due to the logarithmic scale.
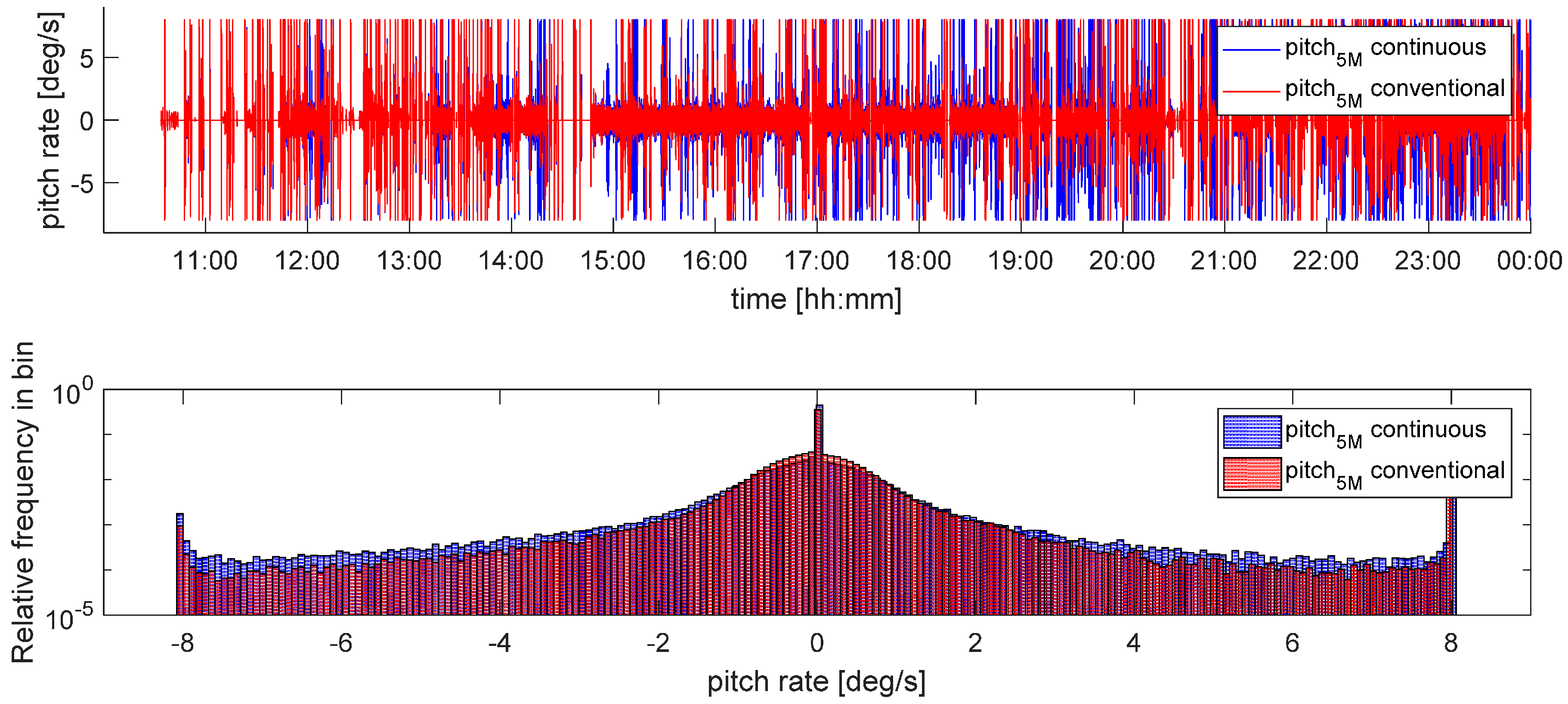
The pitch rates are also comparable, as can be seen in
Figure 17. In both cases they regularly reach −8 deg/s and 8 deg/s, which is the maximum pitch rate of the 5M. Continuous feed-in management causes only somewhat more frequent high pitch rates. (Again, when looking at
Figure 17 it has to be kept in mind that the relative frequency of the pitch rates is plotted on a logarithmic scale.) This might appear surprising at first sight, as it could be suspected that maintaining a constant
Pdem (conventional feed-in management) requires less pitching actions than continuously varying
Pdem (continuous feed-in management). Comparing
Figure 12 and
Figure 17 reveals that conventional feed-in management, on average, requires somewhat lower pitch rates. However, a constant
Pdem still requires drastic pitching actions, as the wind speed still varies. This effect becomes more dominant for higher wind speeds or lower
Pdem as these two variables have an effect on the pitch sensitivity [
8].
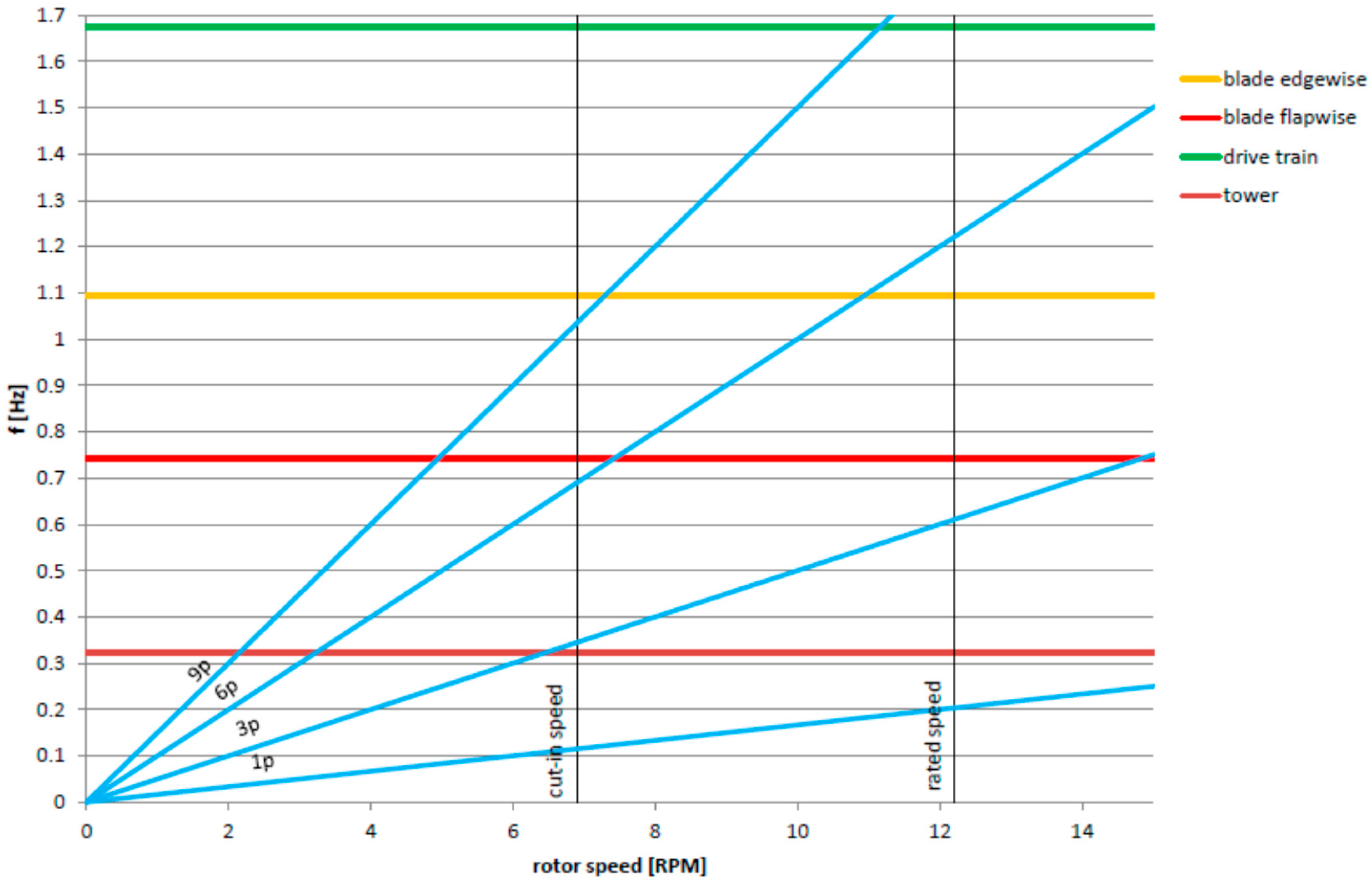
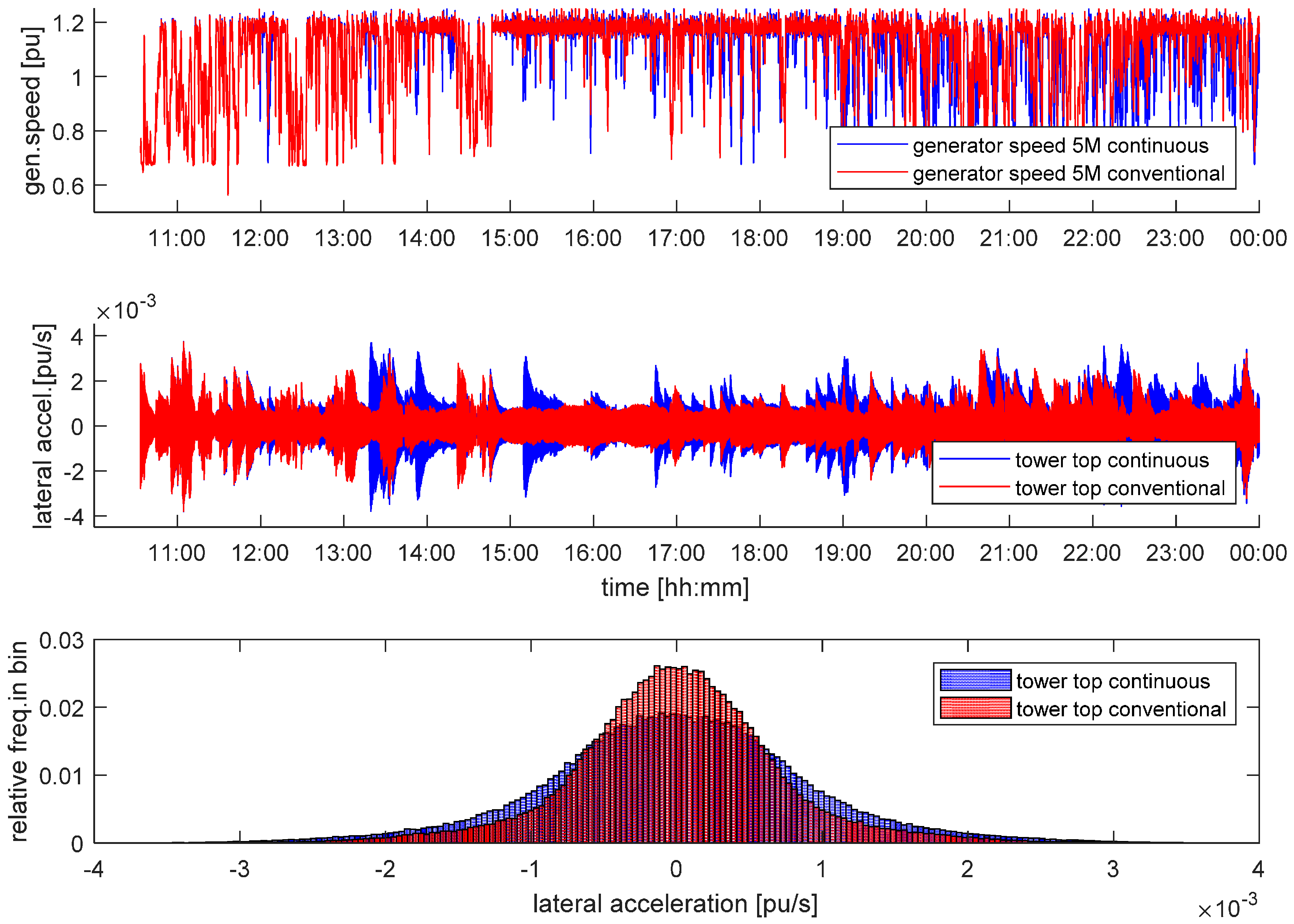
Another measure for mechanical stress is the acceleration of the tower top, which can occur in the lateral direction (in rotor plane direction) and in the longitudinal direction (in out of rotor plane direction). Excitation in the lateral direction is mainly caused by imbalances in the rotor. To emulate imperfections in manufacturing one of the rotor blades of the 5M is 100 kg heavier than the other two. This imbalance in the rotor leads to lateral excitation, especially when the rotor speed is close to the eigenfrequency of the tower. Looking at
Figure 3 makes it obvious that whenever the rotational speed of the rotor is low, the 3p excitation is close to the eigenfrequency of the tower. To illustrate cause and effect of this phenomenon
Figure 18 shows the rotational speed, the resulting lateral acceleration of the tower, and the frequency distribution of this acceleration.
Figure 18 reveals that the lateral vibrations of the tower top occur more often in case of continuous feed-in management. This is obvious as in continuous feed-in management the power varies on a regular basis, leading to more variations of the rotor speed.
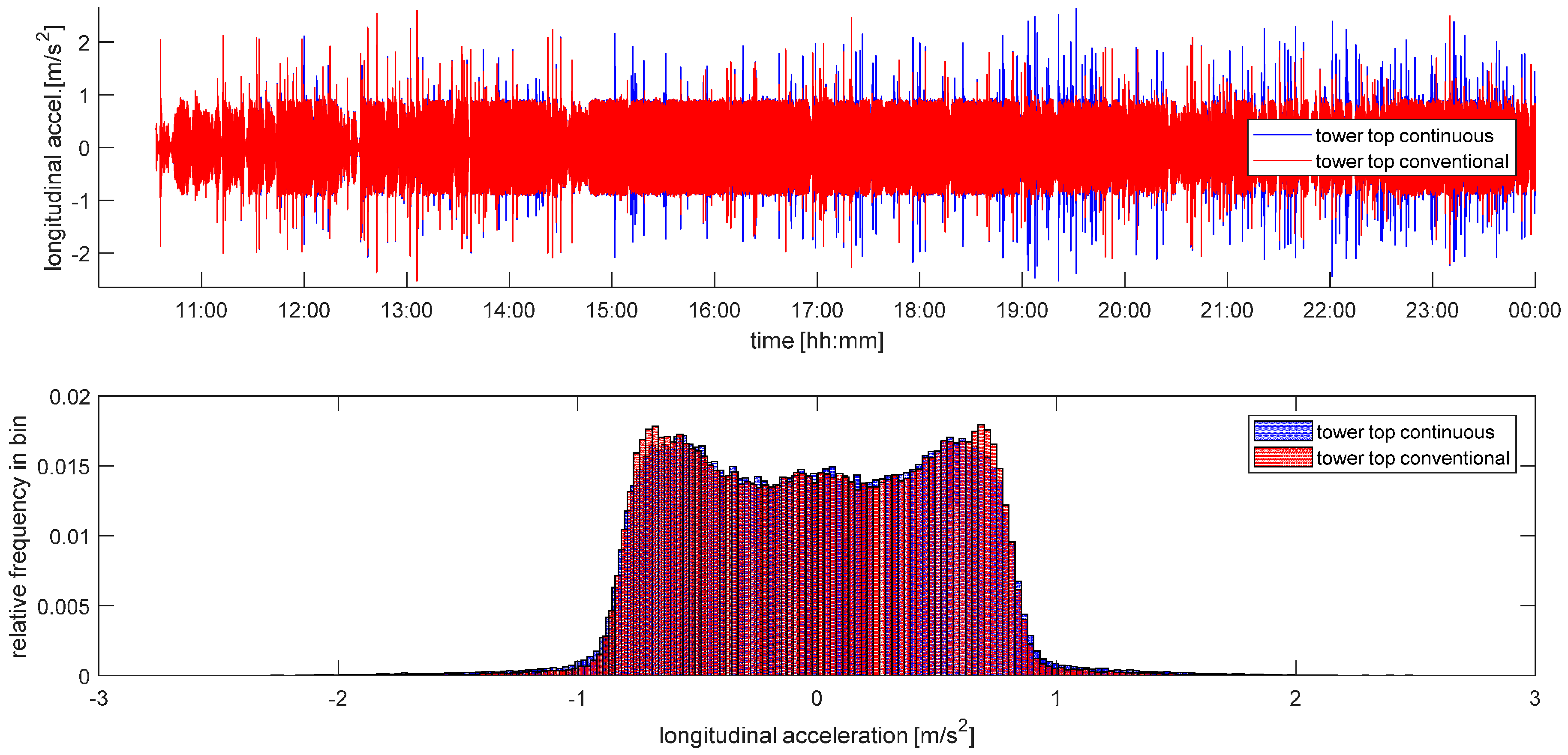
Tower vibrations in the longitudinal direction are mainly caused by wind speed variations and pitch angle variations. In particular pitch angle variations with high pitch rates have drastic effects on the thrust of the rotor, and hence, excite the tower in the longitudinal direction. While the time traces of the wind speed are comparable for both scenarios, the pitch variations are considerably different, as can be seen in
Figure 16 and
Figure 17.
Figure 19 shows the tower top acceleration of the 5M in the longitudinal direction. It can be seen that the tower is more strongly excited when
Pdem requires pitch angle variations with high pitch rates. Consequently, continuous feed-in management causes somewhat more frequent higher accelerations in the longitudinal direction.
In the longitudinal direction a persistent vibration with the eigenfrequency of the tower, f
t, and with a magnitude of about 0.9 m/s
² is observable almost all the time. There is a constant excitation in the wind, because f
t is contained in the wind speed signal (compare
Figure 9). In the lateral acceleration such persistent vibrations are not contained, because the drive train speed, which is the primary cause for lateral tower vibrations, varies all the time. Therefore, excitation in the lateral direction from the imbalance in the rotor happens at different frequencies.
Looking at
Figure 18 and
Figure 19 it can be seen that conventional feed-in management causes fewer single excitations of the tower. However, the maximum accelerations (height of the peaks in
Figure 18 and
Figure 19) are identical in both types of feed-in management. The persistent vibrations in the longitudinal direction are also identical.
Figure 18 further shows that the variation of the generator speed does not exhibit persistent or even unstable vibrations.
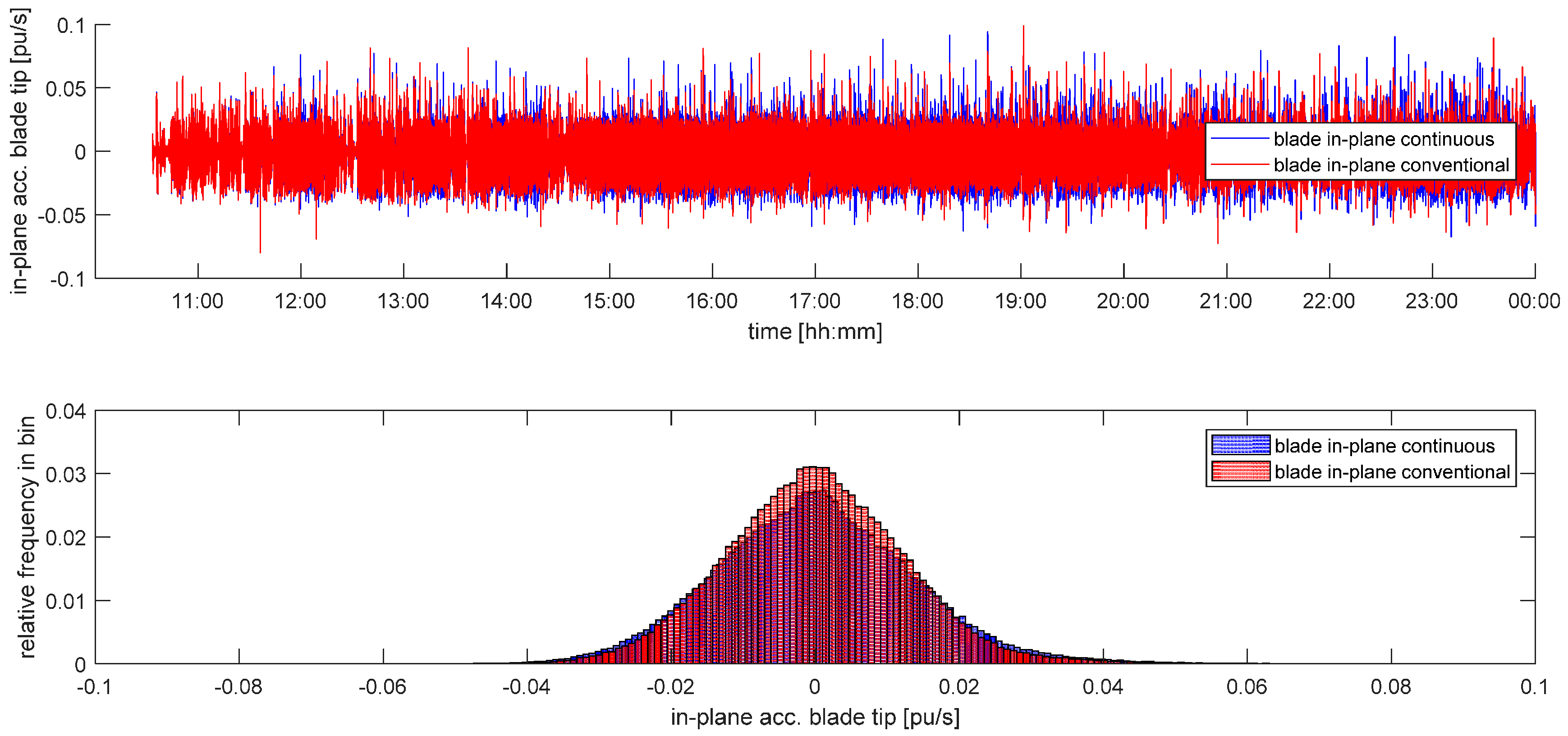
The remaining degrees of freedom of the WT model are the motions of the blade tip with respect to the blade root in the in-plane direction and in the out-of-plane direction.
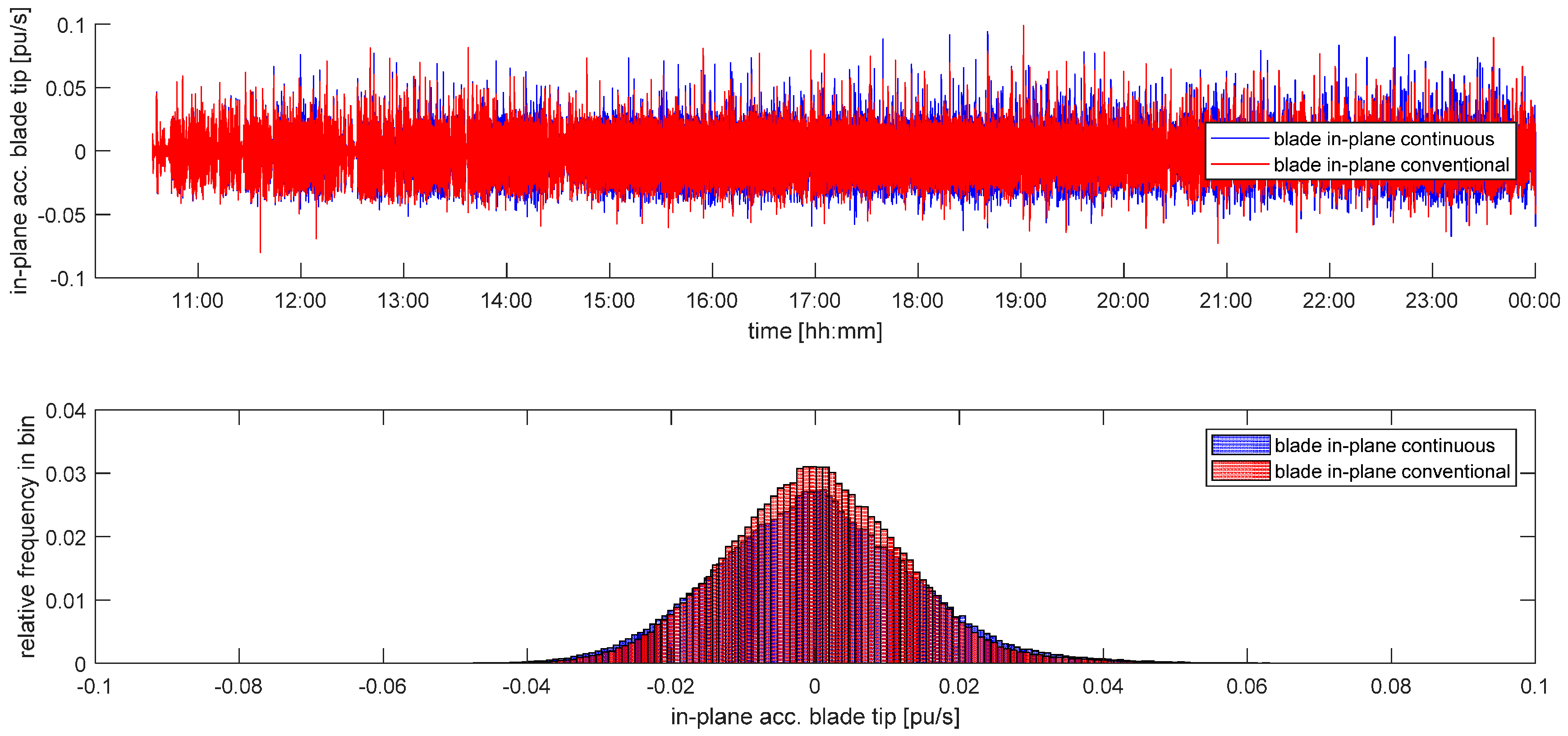
Figure 20 shows the accelerations that the blade tip section of one arbitrary blade of the 5M experiences in the in-plane direction. The acceleration in the in-plane direction exhibits a persistent vibration with a magnitude of about 0.03 pu/s most of time. This acceleration is mainly caused by the rotation of the rotor, i.e., alternating gravitational forces that act on the rotor blade. In addition, also the wind speed variations, which have the same frequency as the blade eigenfrequency in the in-plane direction cause such vibrations. The diagram in
Figure 7 reveals that the magnitude of this wind speed component is constantly high when the wind speed is high. Beyond this persistent vibration, variations in in-plane acceleration are caused by varying operating points. Therefore, continuous feed-in management causes somewhat more frequent higher in-plane acceleration than conventional feed-in management. The only rarely occurring high peaks that arise from drastic changes in instantaneous wind speed at the blade, or from drastic changes in operating point are comparable in both scenarios.
Figure 21 shows that the acceleration in the out-of-plane direction exhibits a persistent vibration with a magnitude of about 5 m/s
² most of the time. This acceleration is mainly caused by the variations in thrust forces that result from wind shear and rotation of the rotor. Wind speed variations that are of the same frequency as the out-of-plane blade eigenfrequency also directly cause acceleration out-of-plane. Beyond this persistent vibration, variations in out-of-plane acceleration are to a minor extent caused by varying operating points. Therefore, continuous feed-in management causes somewhat more frequently occurring out-of-plane accelerations of moderate magnitude.
The persistent vibrations are either caused naturally by the rotation of the rotor, or by the deliberately added sinusoidal wind speed components. The sole purpose of these wind speed components is to excite the eigenfrequencies of the WT. Despite these persistent excitations, there are no vibrations with large magnitude that persist for long, or whose magnitude even increases because they are excited by continuous feed-in management. The stochastic nature of the excitations ensure that the WT never dwells long enough in one operating point so that an eigenmode develops vibrations with a critical magnitude [
8]. Even if such critical excitation persists, the aerodynamic damping helps to avoid the vibrations becoming unstable.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















