Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation


Abstract
:1. Introduction
2. Modeling and Analysis of VSG
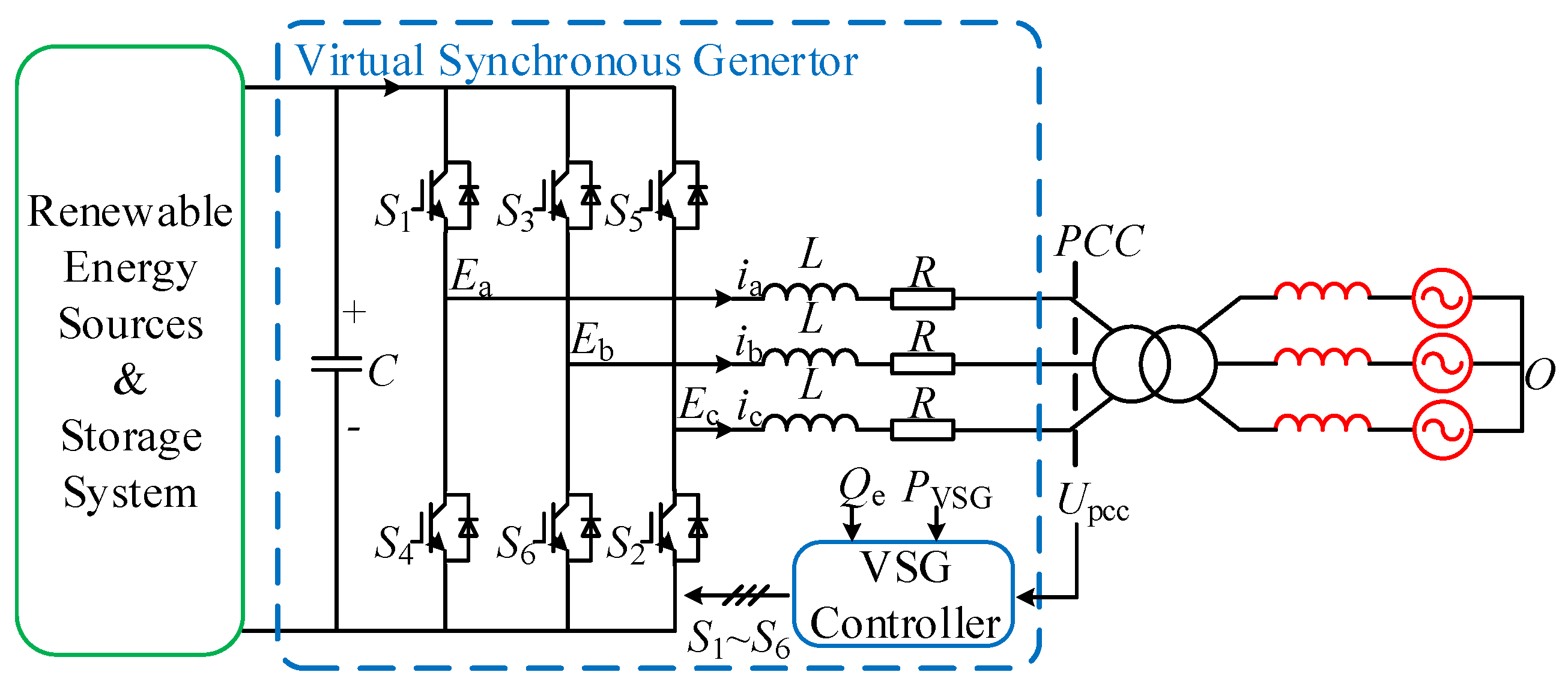
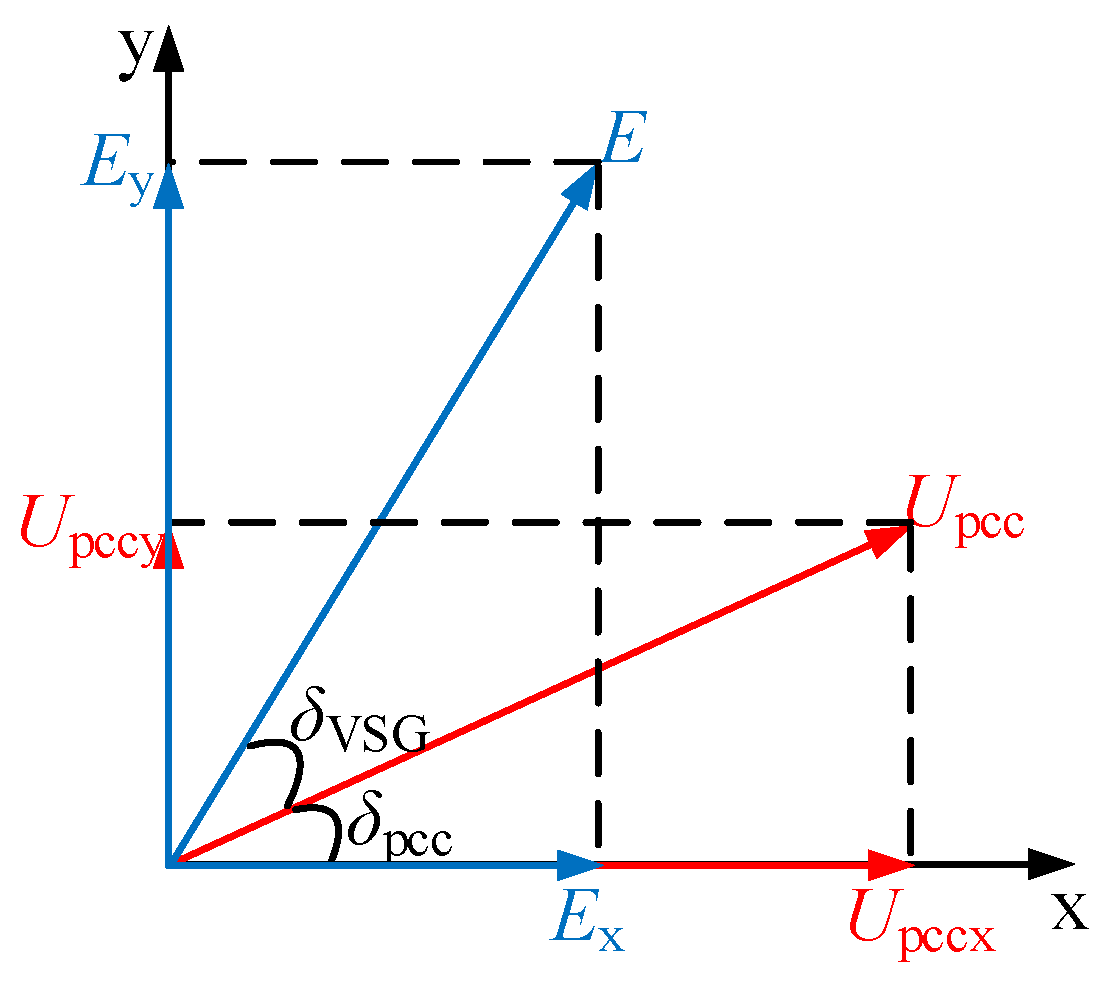
2.1. Mathematical Model of VSG
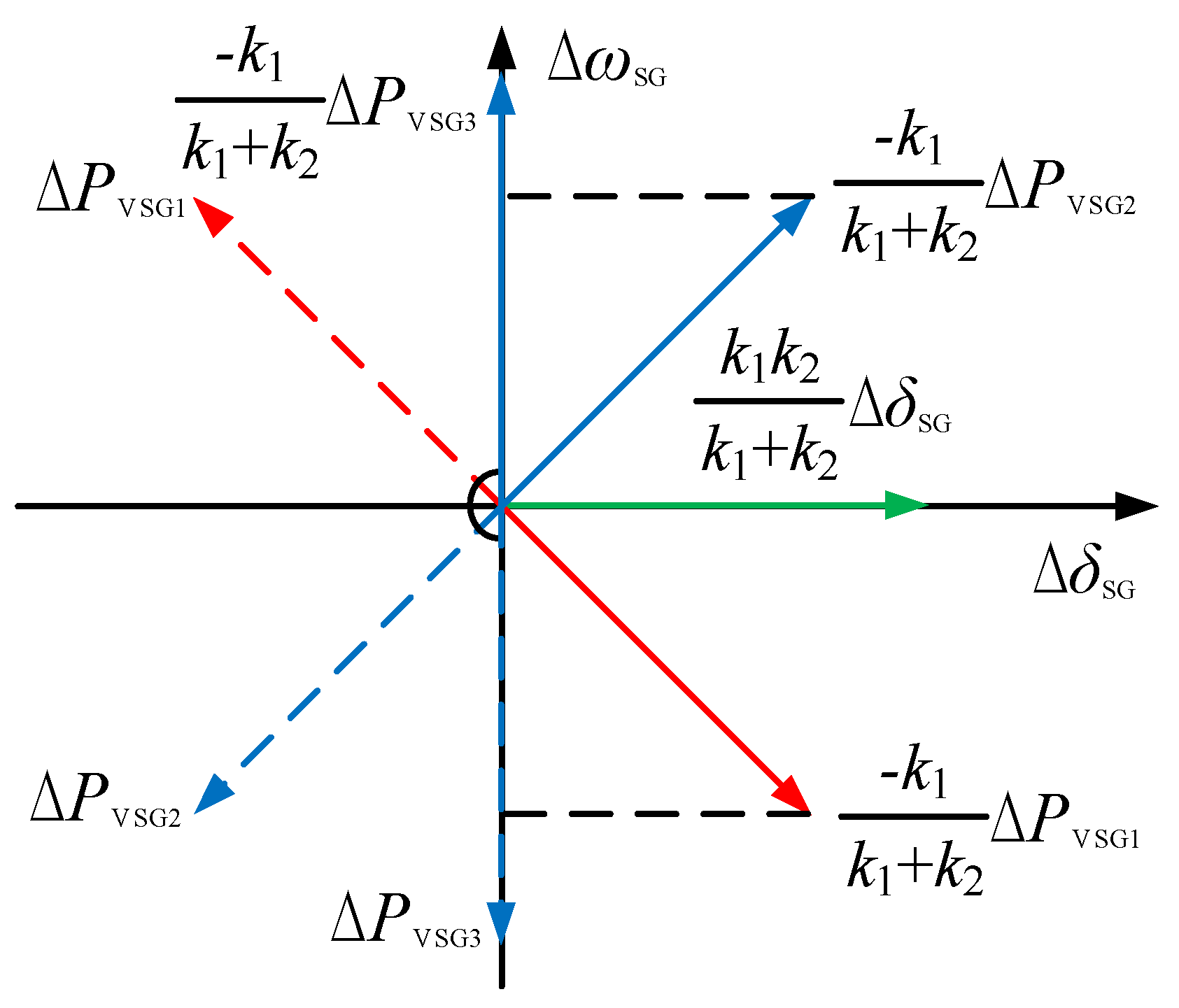
2.2. Damping Characteristics Analysis
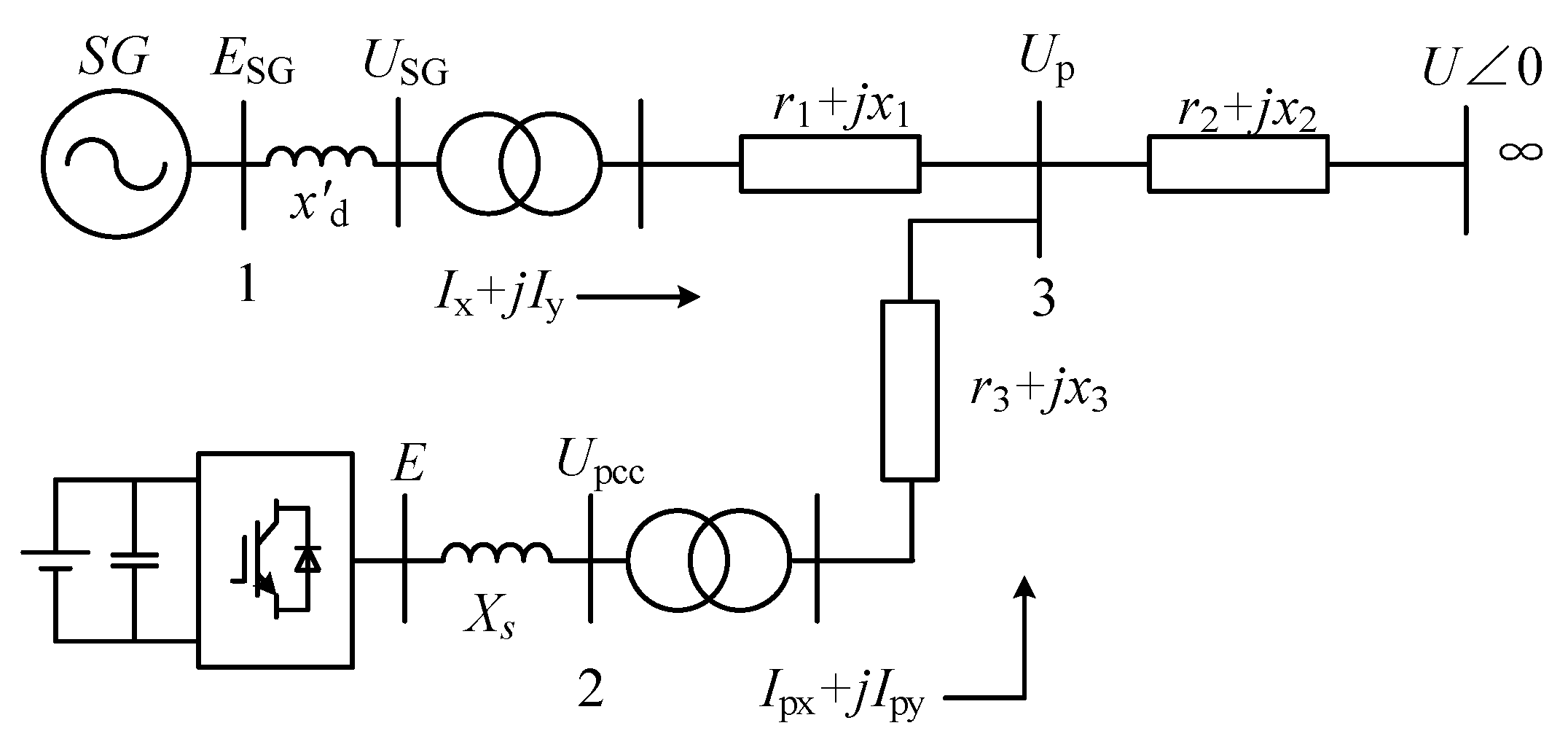
3. System Modeling and Small-Signal Analysis
3.1. Modeling of RES Power Plant Controlled by VSG
3.2. Modeling of Synchronous Generator
3.3. Modeling of Transmission Lines
3.4. Eigenvalue Analysis
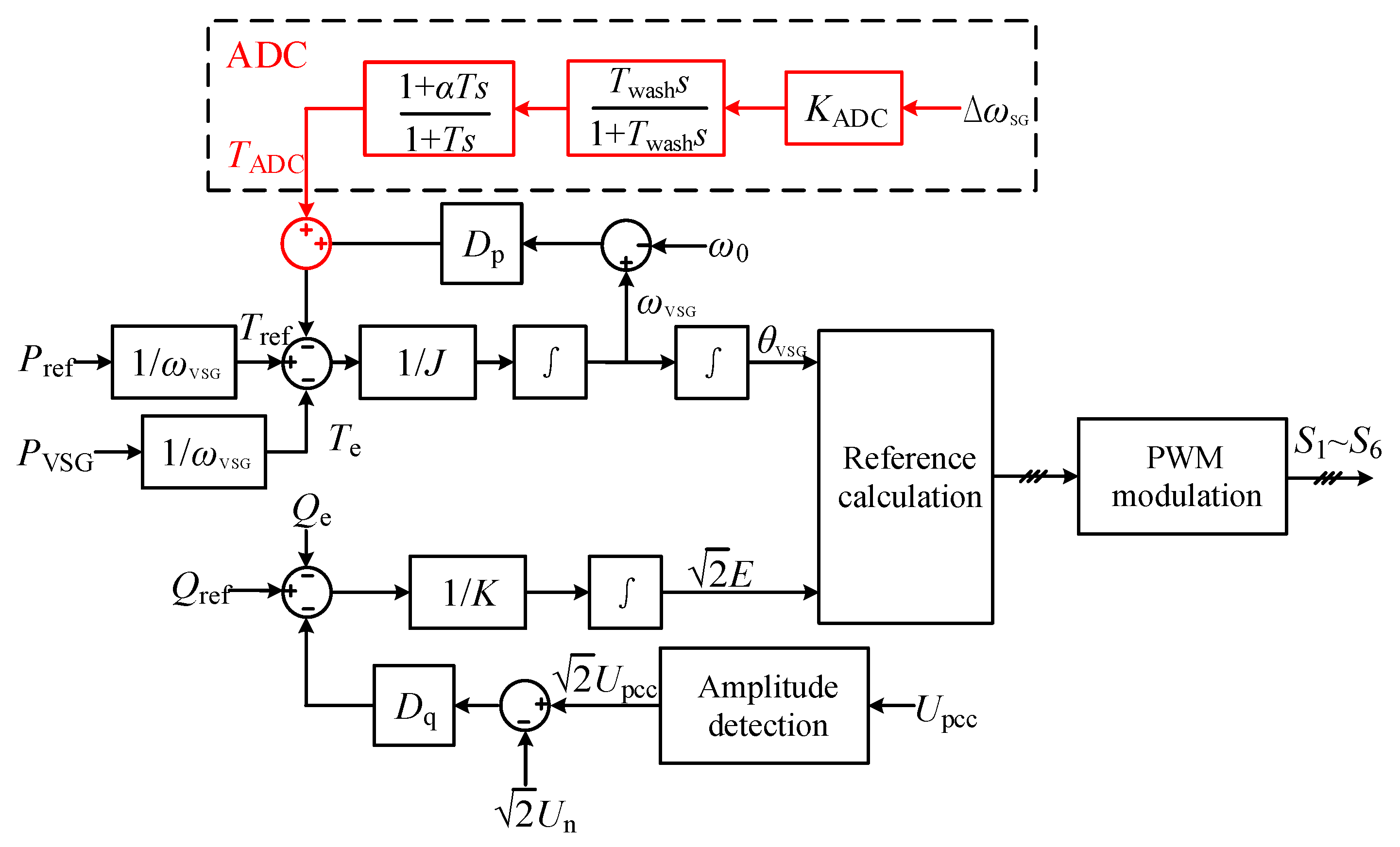
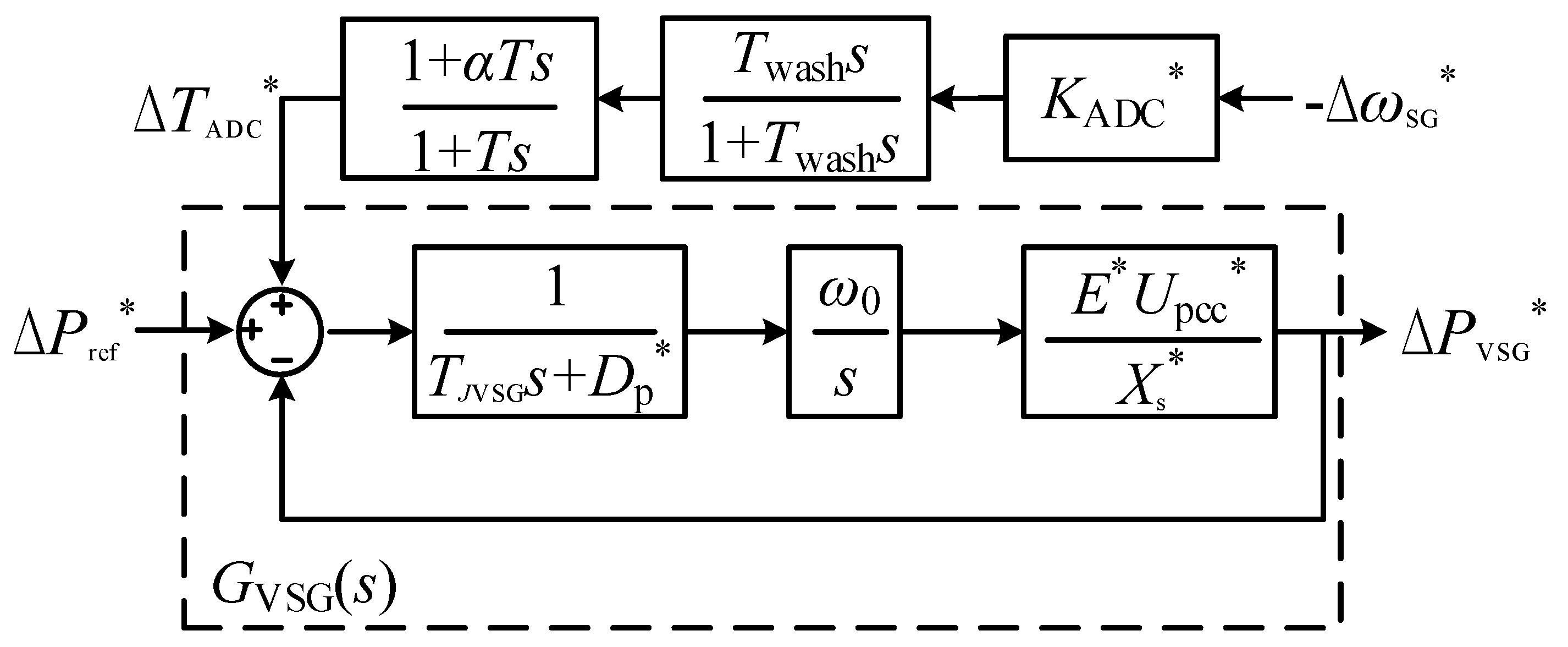
4. Auxiliary Damping Controller for VSG
5. Simulation Results
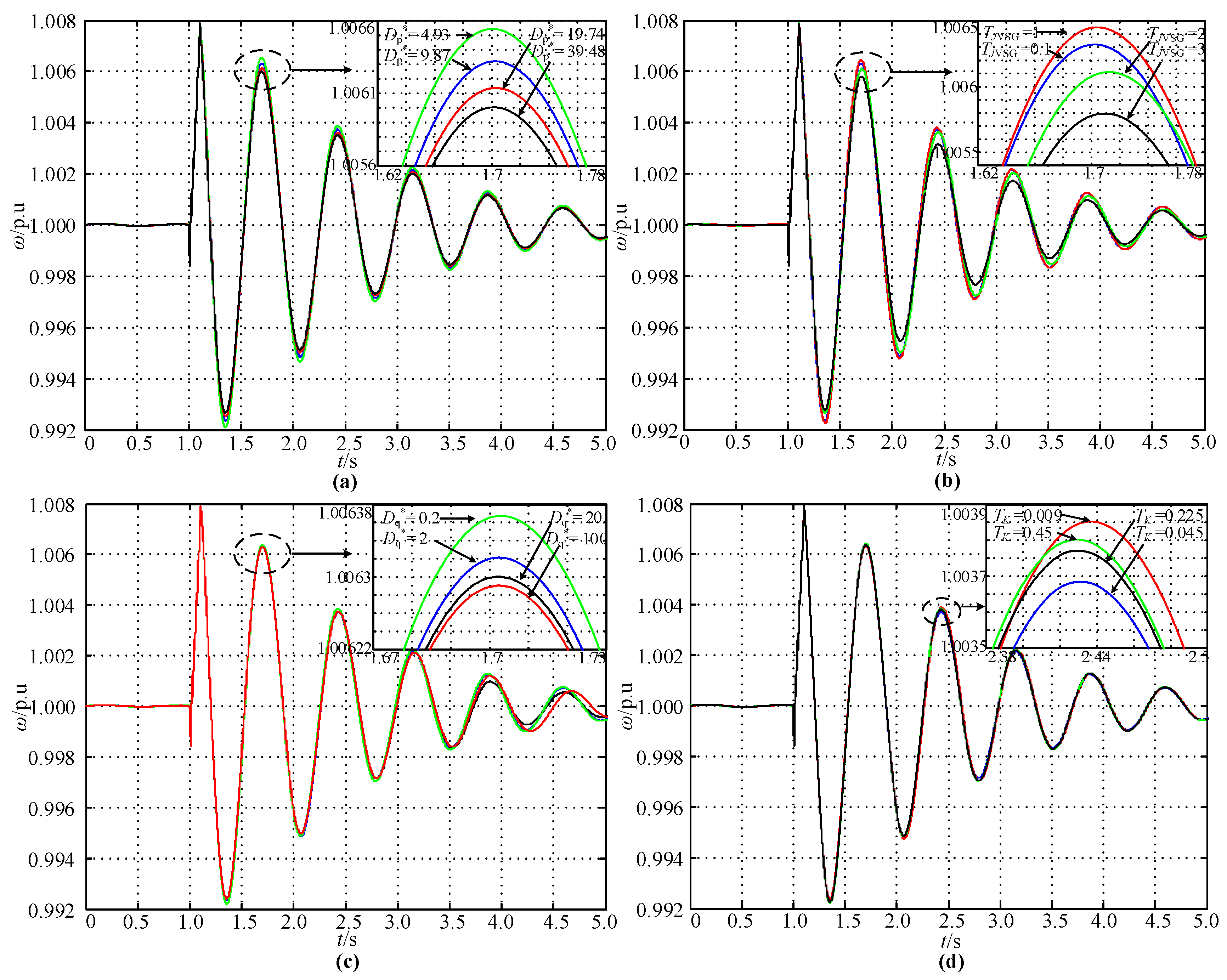
5.1. Dynamic Response for Different Sets of Control Parameters
5.2. Dynamic Response with Proposed ADC
6. Conclusions
- (1)
- Due to the existence of a virtual damping coefficient, the integration of VSG can improve the equivalent damping of the power system. In addition, when the variation of output active power of VSG is 90∼ ahead of the variation of generator speed, VSG can provide a positive damping torque to the synchronous generator.
- (2)
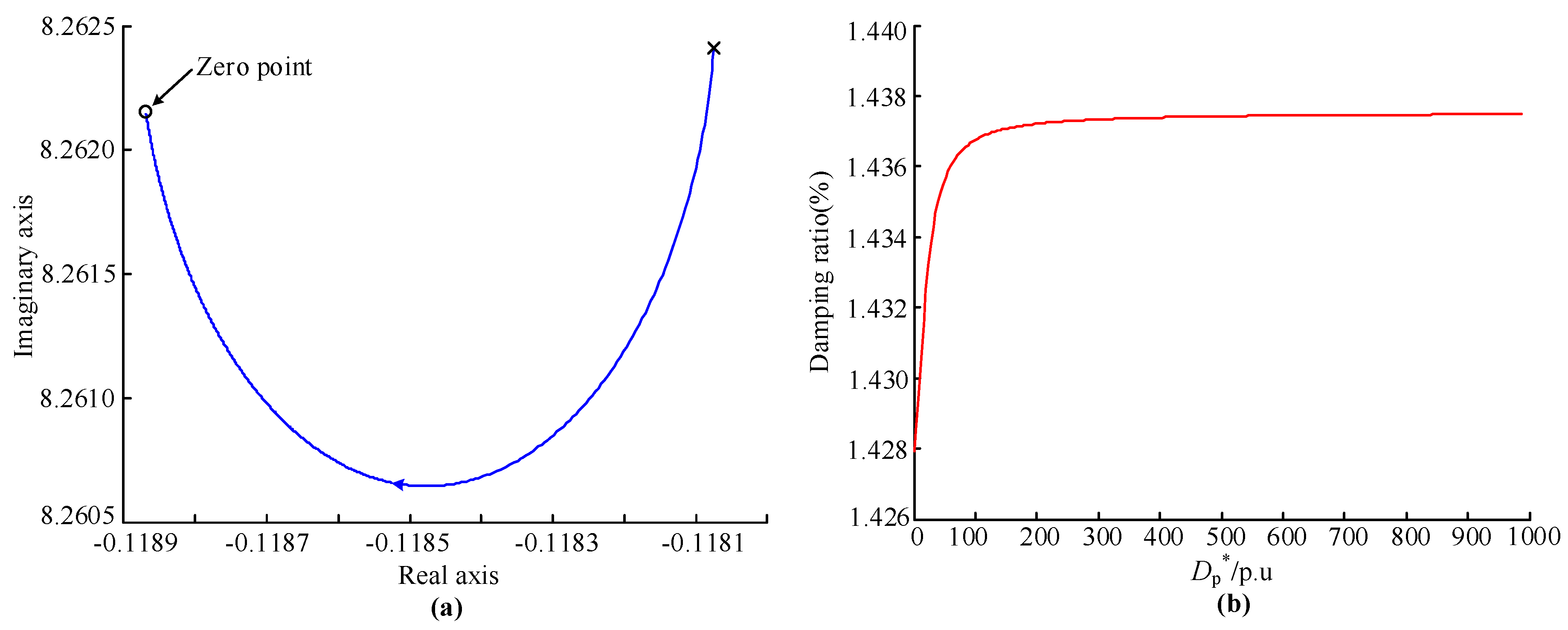
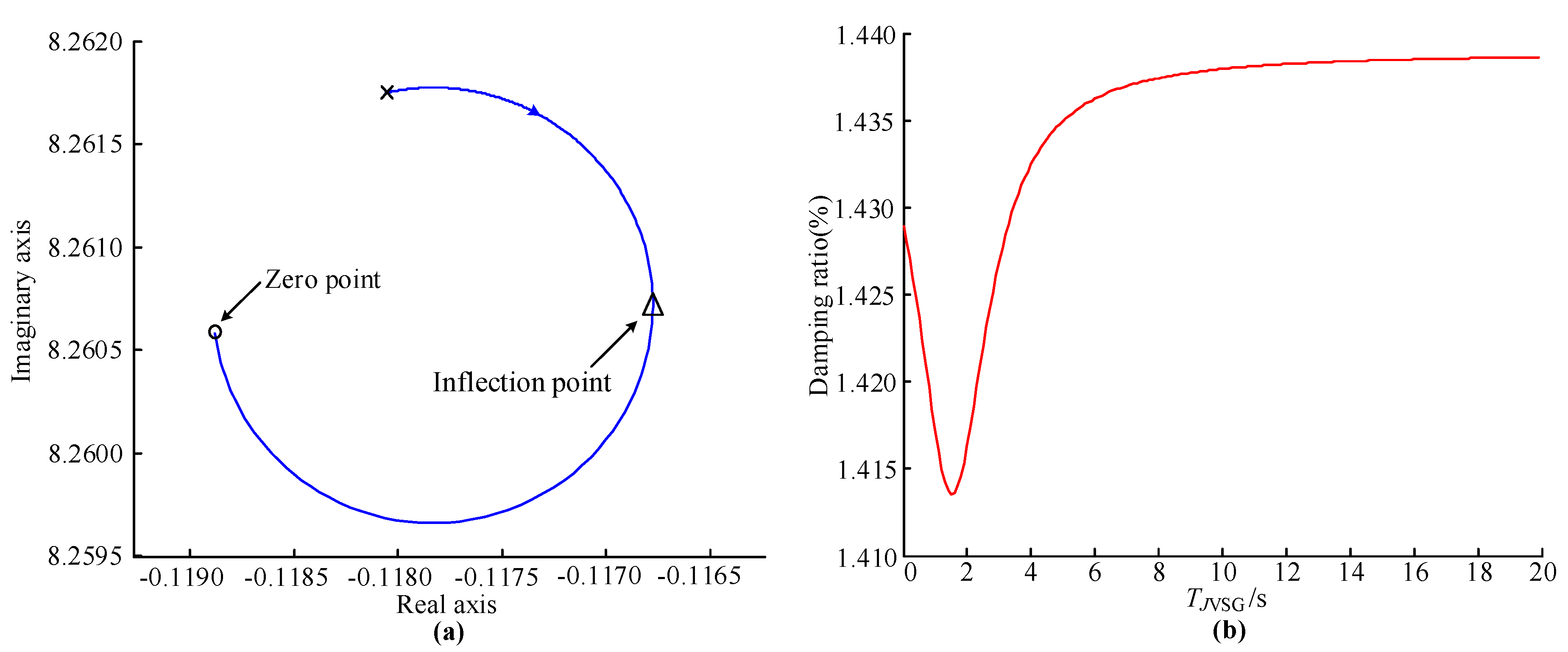
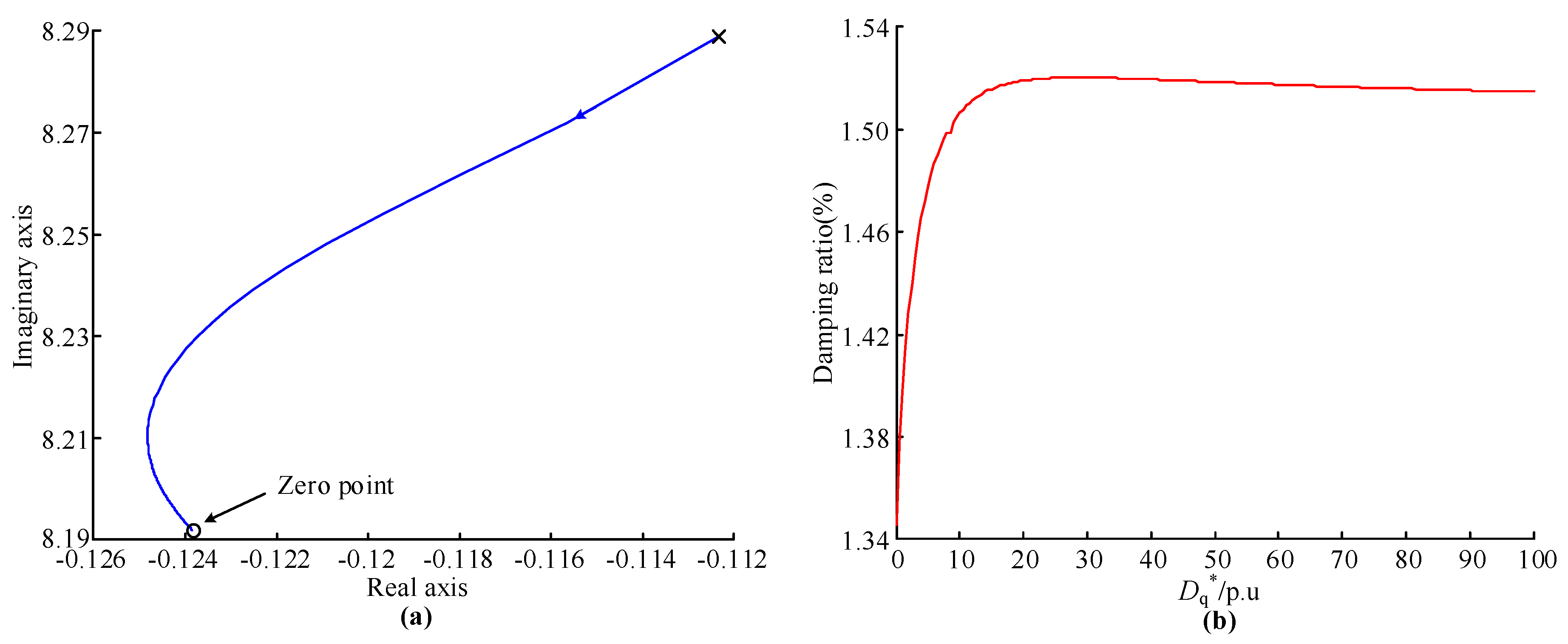
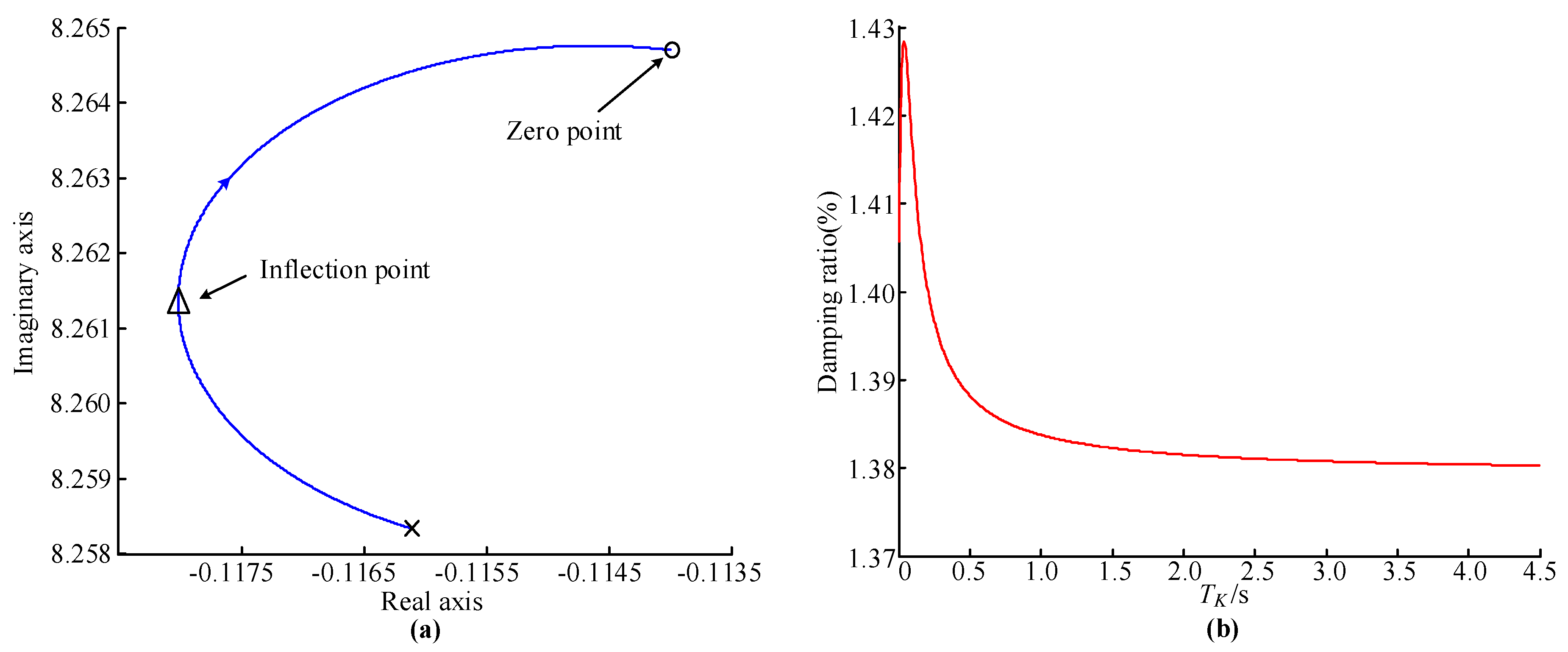
- The influence rules of the virtual damping coefficient and voltage droop coefficient on the damping ratio are almost monotonic, while the influence rules of inertia time constant and time constant of reactive power loop on the damping ratio are non-monotonic. However, all of these parameters only have slight impacts on the system damping ratio. It is not practical to provide additional damping torque to the power system only by adjusting the control parameters of VSG.
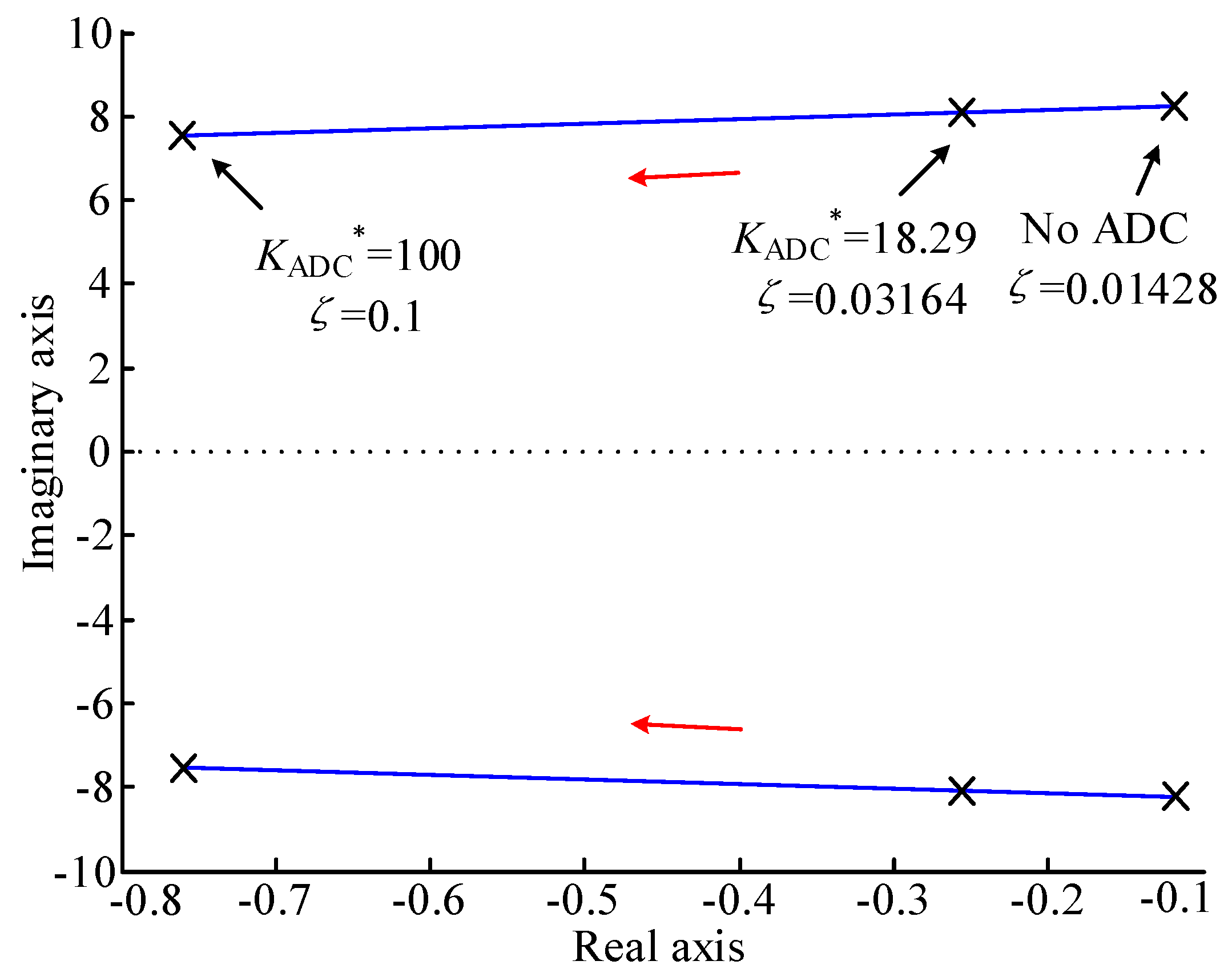
- (3)
- Similarly to traditional PSS, the input signal of ADC can be chosen as the variation of generator speed, the variation of electromagnetic power or some signals associated with the speed. When the input signal is the variation of generator speed, ADC should compensate the phase delay caused by the active power loop of VSG to obtain the greatest damping torque.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Klein, M.; Rogers, G.J.; Kundur, P. A fundamental study of inter-area oscillations in power systems. IEEE Trans. Power Syst. 1991, 6, 914–921. [Google Scholar] [CrossRef]
- Larsen, E.V.; Swann, D.A. Applying power system stabilizers Part I, II and III. IEEE Trans. Power Appar. Syst. 1981, 100, 3017–3046. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, C.; Liu, S.; Wang, X. A review on wide-area damping control to restrain inter-area low frequency oscillation for large-scale power systems with increasing renewable generation. Renew. Sustain. Energy Rev. 2016, 57, 45–58. [Google Scholar] [CrossRef]
- Quintero, J.; Vittal, V.; Heydt, G.T.; Zhang, H. The impact of increased penetration of converter control-based generators on power system modes of oscillation. IEEE Trans. Power Syst. 2014, 29, 2248–2256. [Google Scholar] [CrossRef]
- Liu, W.; Ge, R.; Lv, Q.; Li, H.; Ge, J. Research on a Small Signal Stability Region Boundary Model of the Interconnected Power System with Large-Scale Wind Powe. Energies 2015, 8, 2312–2336. [Google Scholar] [CrossRef]
- Shah, R.; Mithulananthan, N.; Bansal, R.C.; Ramachandaramurthy, V.K. A review of key power system stability challenges for large-scale PV integration. Renew. Sustain. Energy Rev. 2015, 41, 1423–1436. [Google Scholar] [CrossRef]
- Eftekharnejad, S.; Vittal, V.; Heydt, G.T.; Keel, B.; Loehr, J. Small signal stability assessment of power systems with increased penetration of photovoltaic generation: A case study. IEEE Trans. Sustain. Energy 2013, 4, 960–967. [Google Scholar] [CrossRef]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the IEEE International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Improving the grid power quality using virtual synchronous machines. In Proceedings of the IEEE International Conference on Power engineering, energy and electrical drives, Malaga, Spain, 11–13 May 2011; pp. 1–6. [Google Scholar]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X.; Sun, L. On inertial dynamics of virtual-synchronous-controlled DFIG-based wind turbines. IEEE Trans. Energy Convers. 2015, 30, 1691–1702. [Google Scholar] [CrossRef]
- Ming, W.L.; Zhong, Q.C. Synchronverter-based transformerless PV inverters. In Proceedings of the IEEE Annual Conference on Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 4396–4401. [Google Scholar]
- Pichetjamroen, A.; Ise, T. Power Control of Low Frequency AC Transmission Systems Using Cycloconverters with Virtual Synchronous Generator Control. Energies 2016, 10, 34. [Google Scholar] [CrossRef]
- Aouini, R.; Marinescu, B.; Kilani, K.B.; Elleuch, M. Synchronverter-based emulation and control of HVDC transmission. IEEE Trans. Power Syst. 2016, 31, 278–286. [Google Scholar] [CrossRef]
- Guan, M.; Pan, W.; Zhang, J.; Hao, Q.; Cheng, J.; Zheng, X. Synchronous generator emulation control strategy for voltage source converter (VSC) stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Le, K.H. Improving transient stability in a grid-connected squirrel-cage induction generator wind turbine system using a fuzzy logic controller. Energies 2015, 8, 6328–6349. [Google Scholar] [CrossRef] [Green Version]
- Tan, A.; Lin, X.; Sun, J.; Lyu, R.; Li, Z.; Peng, L.; Khaild, M.S. A Novel DFIG Damping Control for Power System with High Wind Power Penetration. Energies 2016, 9, 521. [Google Scholar] [CrossRef]
- Bian, X.Y.; Geng, Y.; Lo, K.L.; Fu, Y.; Zhou, Q.B. Coordination of PSSs and SVC damping controller to improve probabilistic small-signal stability of power system with wind farm integration. IEEE Trans. Power Syst. 2016, 31, 2371–2382. [Google Scholar] [CrossRef]
- Hashemi, Y.; Shayeghi, H.; Moradzadeh, M.; Safari, A. Design of hybrid damping controller based on multi-target gravitational search optimization algorithm in a multi-machine power system with high penetration of PV park. J. Cent. South Univ. 2016, 23, 1163–1175. [Google Scholar] [CrossRef]
- Shah, R.; Mithulananthan, N.; Lee, K.Y. Large-scale PV plant with a robust controller considering power oscillation damping. IEEE Trans. Energy Convers. 2013, 28, 106–116. [Google Scholar] [CrossRef]
- Miguel, A.T.L.; Lopes, L.A.C.; Luis, A.M.T.; Jose, R.E.C. Self-tuning virtual synchronous machine: A control strategy for energy storage systems to support dynamic frequency control. IEEE Trans. Energy Convers. 2014, 29, 833–840. [Google Scholar]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Li, D.; Zhu, Q.; Lin, S.; Bian, X.Y. A Self-Adaptive Inertia and Damping Combination Control of VSG to Support Frequency Stability. IEEE Trans. Energy Convers. 2017, 32, 397–398. [Google Scholar] [CrossRef]
- Dong, S.; Chen, Y.C. Adjusting Synchronverter Dynamic Response Speed via Damping Correction Loop. IEEE Trans. Energy Convers. 2017, 32, 608–619. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced virtual synchronous generator control for parallel inverters in microgrids. IEEE Trans. Smart Grid 2016. [Google Scholar] [CrossRef]
- Ashabani, M.; Mohamed, Y.A.R.I. Integrating VSCs to weak grids by nonlinear power damping controller with self-synchronization capability. IEEE Trans. Power Syst. 2014, 29, 805–814. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.C. Small-signal modeling and parameters design for virtual synchronous generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]
- Zhang, Y.; Bose, A. Design of wide-area damping controllers for interarea oscillations. IEEE Trans. Power Syst. 2008, 23, 1136–1143. [Google Scholar] [CrossRef]
- Leon, A.E.; Solsona, J.A. Power oscillation damping improvement by adding multiple wind farms to wide-area coordinating controls. IEEE Trans. Power Syst. 2014, 29, 1356–1364. [Google Scholar] [CrossRef]
- Chaudhuri, B.; Majumder, R.; Pal, B.C. Wide-area measurement-based stabilizing control of power system considering signal transmission delay. IEEE Trans. Power Syst. 2004, 19, 1971–1979. [Google Scholar] [CrossRef]
- Wu, H.; Tsakalis, K.S.; Heydt, G.T. Evaluation of time delay effects to wide-area power system stabilizer design. IEEE Trans. Power Syst. 2004, 19, 1935–1941. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Nominal power (MVA) | 100 | Nominal voltage (kV) | 13.8 |
| Mechanical power (p.u) | 0.8 | D-axis synchronous reactance (p.u) | 1.305 |
| Inertia time constant (s) | 7.4 | Q-axis synchronous reactance (p.u) | 0.474 |
| D-axis transient time constant (s) | 4.4529 | D-axis transient reactance (p.u) | 0.296 |
| Damping coefficient (p.u) | 2.6 | Stator resistance (p.u) | |
| Proportional coefficient of AVR (p.u) | 200 | Time constant of AVR (s) | 0.001 |
| Reference Voltage of AVR (p.u) | 1 |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| DC voltage (kV) | 20 | Switching frequency (kHz) | 20 |
| Nominal AC voltage (kV) | 10 | Equivalent inductance at AC side (mH) | 7 |
| Reference of active power (MW) | 20 | Reference of reactive power (Mvar) | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Xia, C.; Chen, N.; Cheema, K.M.; Yang, L.; Li, C. Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation. Energies 2017, 10, 1146. https://doi.org/10.3390/en10081146
Gao B, Xia C, Chen N, Cheema KM, Yang L, Li C. Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation. Energies. 2017; 10(8):1146. https://doi.org/10.3390/en10081146
Chicago/Turabian StyleGao, Bingtuan, Chaopeng Xia, Ning Chen, Khalid Mehmood Cheema, Libin Yang, and Chunlai Li. 2017. "Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation" Energies 10, no. 8: 1146. https://doi.org/10.3390/en10081146
APA StyleGao, B., Xia, C., Chen, N., Cheema, K. M., Yang, L., & Li, C. (2017). Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation. Energies, 10(8), 1146. https://doi.org/10.3390/en10081146