Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs

Abstract
:1. Introduction
2. ECM and State Estimation Algorithm
2.1. ECM
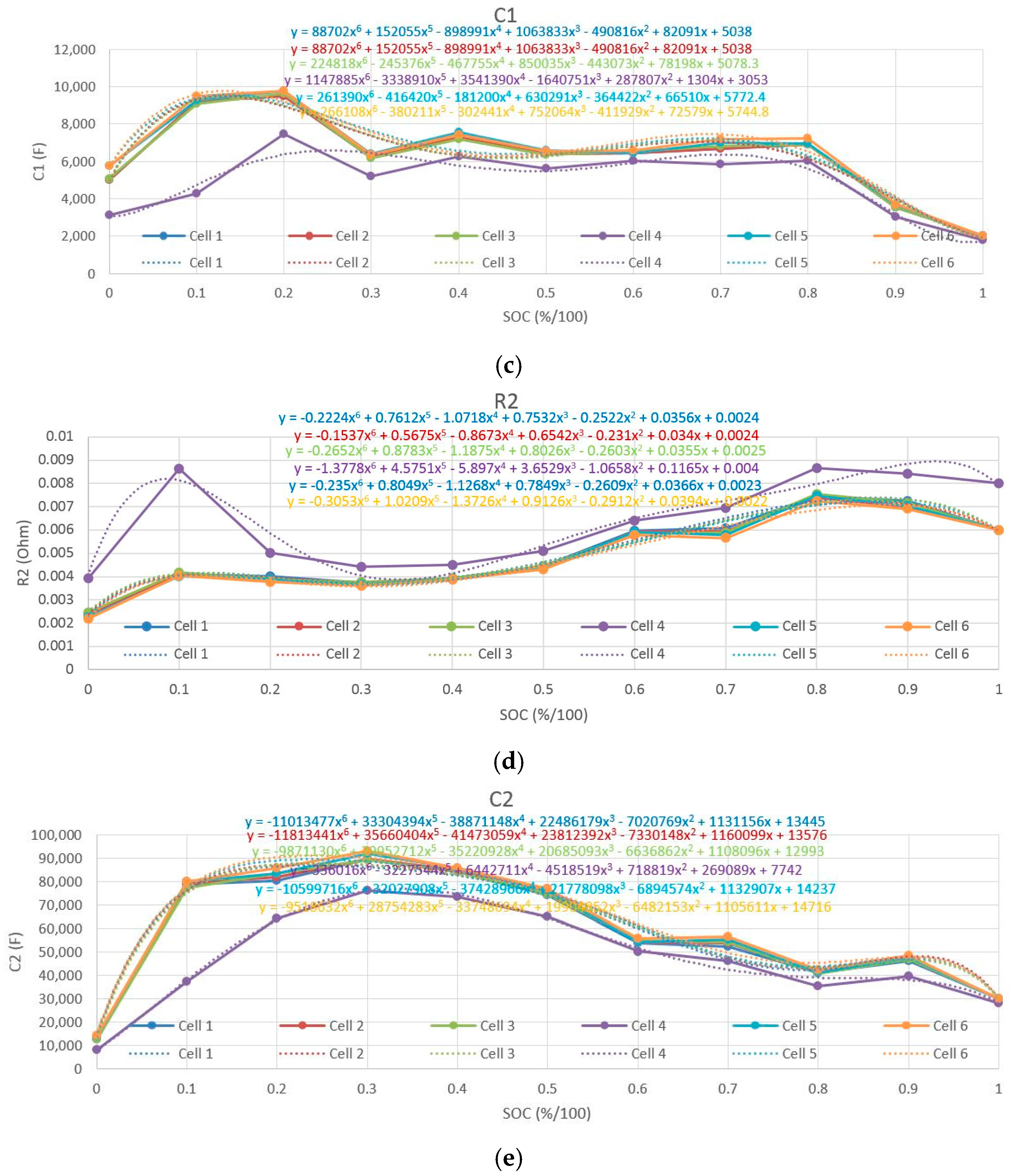
2.2. TBLI Parameter Determination
2.3. SOC Estimation Logic
2.4. SOP Estimation Logic
2.5. EKF State Estimation
3. Test Setup
3.1. Test Environment
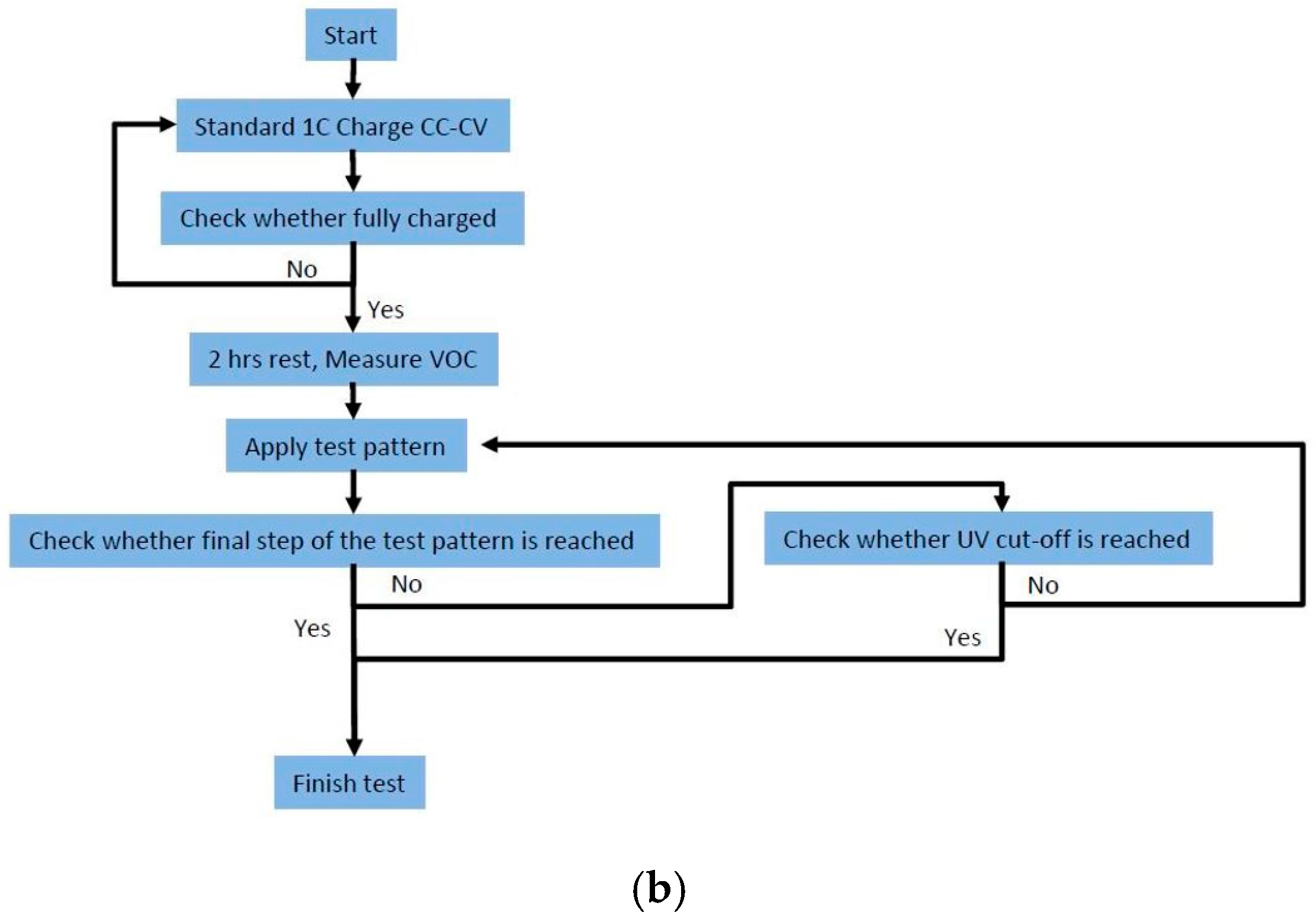
3.2. Test Case
4. Experimental Results
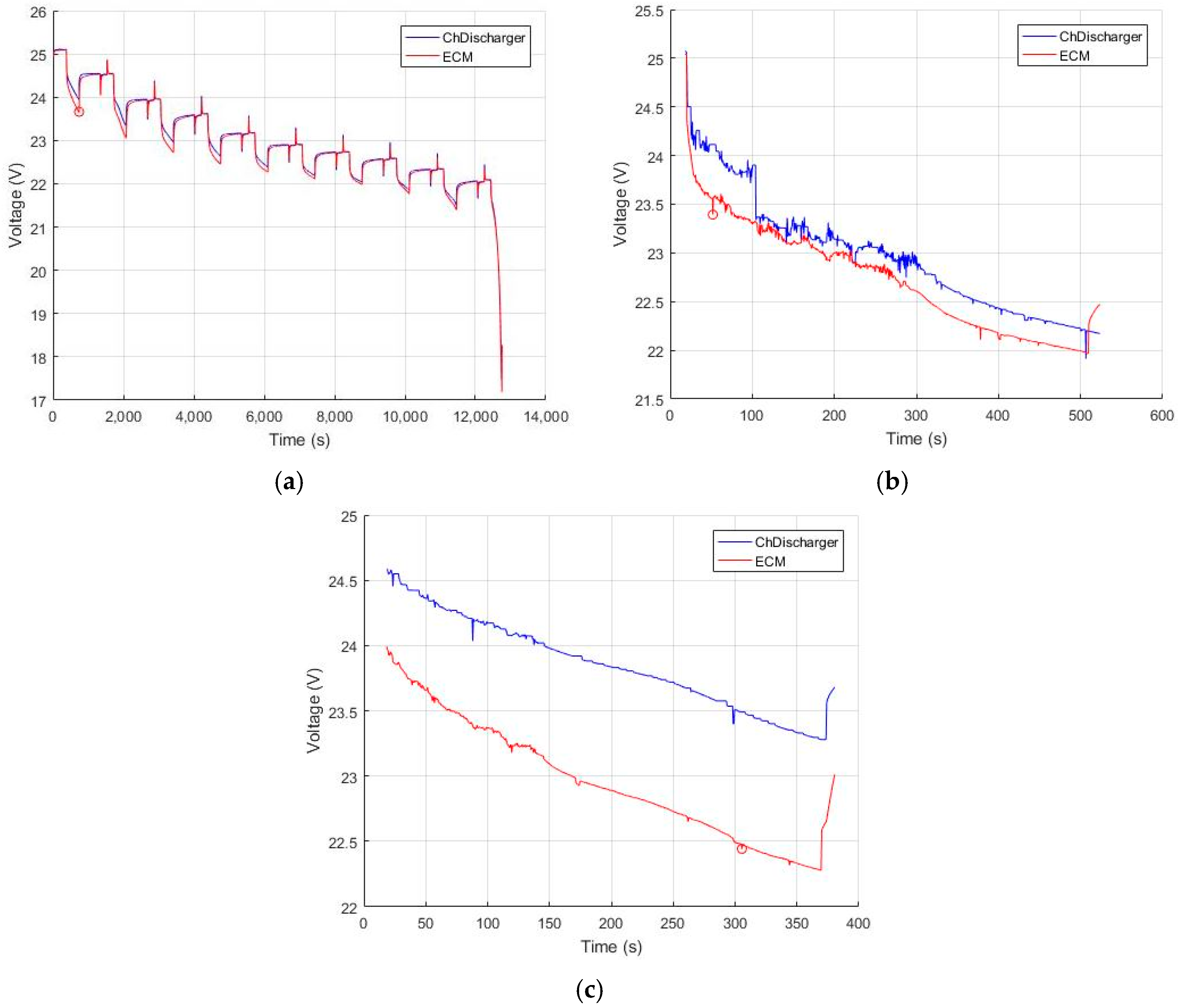
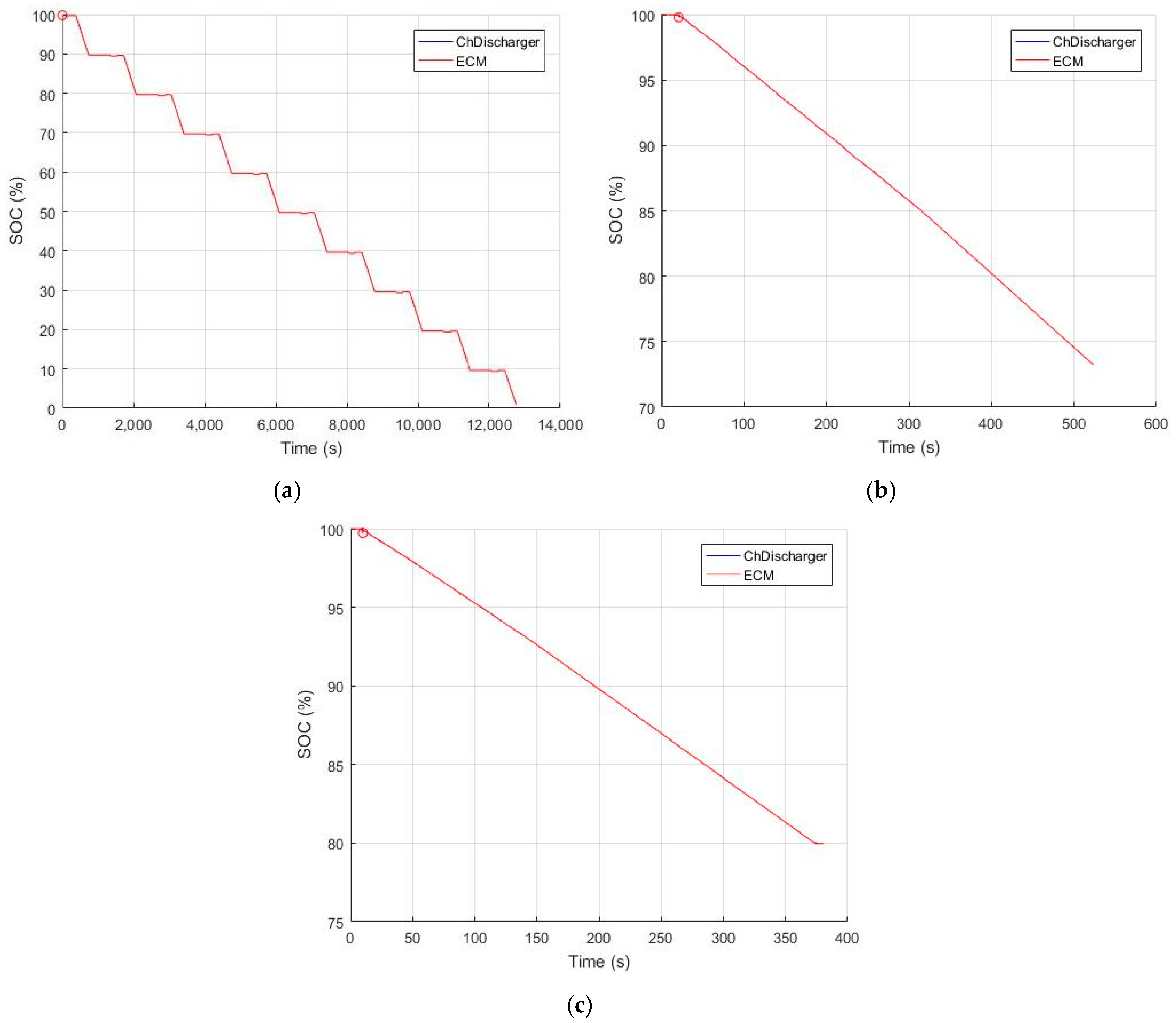
4.1. SOC Estimation Result
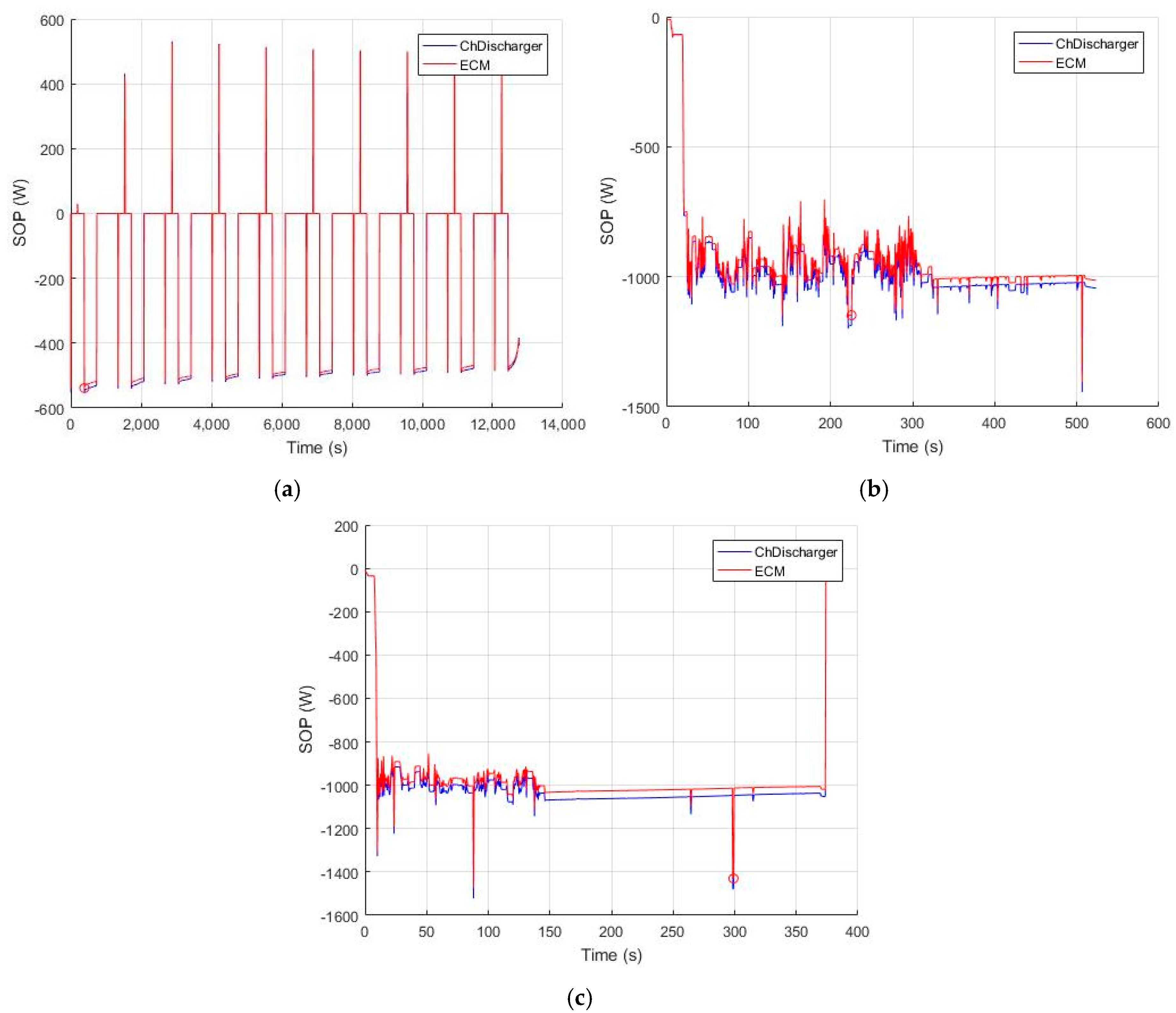
4.2. SOP Estimtion Result
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Drone Market to Hit 3 Million Units in 2017 with $6 Billion in Revenue, Says Gartner. Available online: https://goo.gl/H9SRkx (accessed on 11 July 2017).
- Clothier, R.A.; Walker, R.A. Determination and evaluation of UAV safety objectives. In Proceedings of the 21st International Unmanned Air Vehicle Systems Conference, Bristol, UK, 3–5 April 2006. [Google Scholar]
- Siebery, S.; Teizer, J. Mobile 3D mapping for surveying earthwork projects using an unmanned aerial vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Dempsey, M.E. Eyes of the Army—U.S. Army Roadmap for Unmanned Aircraft Systems Roadmap 2010–2035; U.S. Army UAS Center of Excellence: Fort Rucker, AL, USA, 2010; Volume 9, pp. 1–140. [Google Scholar]
- Plett, G.L. Battery management systems. In Equivalent-Circuit Methods, 2nd ed.; Artech House Publishers: Norwood, MA, USA, 2014; Volume 2. [Google Scholar]
- Gao, Z.; Chin, C.S.; Woo, W.L.; Jia, J. Integrated equivalent circuit and thermal model for simulation of temperature-dependent LiFePO4 battery in actual embedded application. Energies 2017, 10, 85. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.S.; Woo, W.L.; Jia, J.; Toh, W.D. Lithium-ion battery modeling and validation for smart power system. In Proceedings of the IEEE International Conference on Computer, Communications, and Control Technology, Sabah, Malaysia, 21–23 April 2015. [Google Scholar]
- Jia, J.; Lin, P.; Chin, C.S.; Toh, W.D.; Gao, Z.; Lyu, H.; Cham, Y.T.; Mesbahi, E. Multirate strong tracking extended kalman filter and its implementation on lithium ion phosphate (LiFePO4) battery system. In Proceedings of the IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, Australia, 9–12 June 2015. [Google Scholar]
- Sharma, O.P. Analysis and parameter estimation of Li-ion batteries simulations for electric vehicles. In Proceedings of the American Control Conference, Sam Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Thanagasundram, S.; Arunachala, R.; Makinejad, K.; Teutsch, T.; Jossen, A. A cell level model for battery simulation. In Proceedings of the European Electric Vehicle Congress, Brussels, Belgium, 19–22 November 2012. [Google Scholar]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs —Part 3: State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indoor Test | ||||||
|---|---|---|---|---|---|---|
| 0 | 0.5 | 1 | ||||
| (V) | SOC (%) | (V) | SOC (%) | (V) | SOC (%) | |
| w/o EKF | 0.7578 | 39.9362 | 0.7424 | 18.6068 | 0.7340 | 0.0069 |
| 0.1623 | 9.4653 | 0.1605 | 5.1873 | 0.1693 | 0.0038 | |
| w/EKF | 0.6458 | 29.9823 | 0.6735 | 15.2118 | 0.6795 | 0.1477 |
| 0.1054 | 10.6069 | 0.1092 | 5.4402 | 0.1203 | 0.0030 | |
| Outdoor Test 1 | ||||||
|---|---|---|---|---|---|---|
| 0 | 0.5 | 1 | ||||
| (V) | SOC (%) | (V) | SOC (%) | (V) | SOC (%) | |
| w/o EKF | 0.4997 | 69.7082 | 0.4999 | 29.1448 | 0.4856 | 0.0197 |
| 0.2326 | 39.0010 | 0.1849 | 15.9614 | 0.1483 | 0.0129 | |
| w/EKF | 0.6881 | 52.0318 | 0.7665 | 29.3909 | 0.7208 | 0.1324 |
| 0.2103 | 36.8850 | 0.2287 | 21.1477 | 0.2764 | 0.0097 | |
| Outdoor Test 2 | ||||||
|---|---|---|---|---|---|---|
| 0 | 0.5 | 1 | ||||
| (V) | SOC (%) | (V) | SOC (%) | (V) | SOC (%) | |
| w/o EKF | 1.0793 | 60.9882 | 0.6110 | 20.1175 | 0.7827 | 0.0198 |
| 0.5053 | 25.8171 | 0.4691 | 11.7299 | 0.6590 | 0.0133 | |
| w/EKF | 0.7910 | 42.0999 | 0.9288 | 25.9921 | 1.0485 | 0.2021 |
| 0.6794 | 31.0369 | 0.8108 | 18.3691 | 0.9032 | 0.0133 | |
| Indoor Test | |||
|---|---|---|---|
| 0 | 0.5 | 1 | |
| SOP (W) | |||
| w/o EKF | 498.5191 | 487.4288 | 13.5058 |
| 23.3206 | 11.7625 | 4.9253 | |
| w/EKF | 490.4252 | 210.2128 | 16.2359 |
| 14.1784 | 5.5437 | 5.2790 | |
| Outdoor Test 1 | |||
|---|---|---|---|
| 0 | 0.5 | 1 | |
| SOP (W) | |||
| w/o EKF | 64.0025 | 46.8347 | 39.6367 |
| 34.3817 | 27.3469 | 28.9584 | |
| w/EKF | 43.0444 | 48.1461 | 61.0896 |
| 30.8534 | 35.0064 | 40.3603 | |
| Outdoor Test 2 | |||
|---|---|---|---|
| 0 | 0.5 | 1 | |
| SOP (W) | |||
| w/o EKF | 49.5290 | 46.5362 | 47.9866 |
| 31.8558 | 28.9407 | 32.2639 | |
| w/EKF | 58.2158 | 63.0524 | 66.8031 |
| 35.2726 | 40.0318 | 43.3475 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, S.; Jeong, H. Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs. Energies 2017, 10, 1237. https://doi.org/10.3390/en10081237
Jung S, Jeong H. Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs. Energies. 2017; 10(8):1237. https://doi.org/10.3390/en10081237
Chicago/Turabian StyleJung, Sunghun, and Heon Jeong. 2017. "Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs" Energies 10, no. 8: 1237. https://doi.org/10.3390/en10081237
APA StyleJung, S., & Jeong, H. (2017). Extended Kalman Filter-Based State of Charge and State of Power Estimation Algorithm for Unmanned Aerial Vehicle Li-Po Battery Packs. Energies, 10(8), 1237. https://doi.org/10.3390/en10081237