
A Principal Components Rearrangement Method for Feature Representation and Its Application to the Fault Diagnosis of CHMI





Abstract
:1. Introduction
2. Problem Description
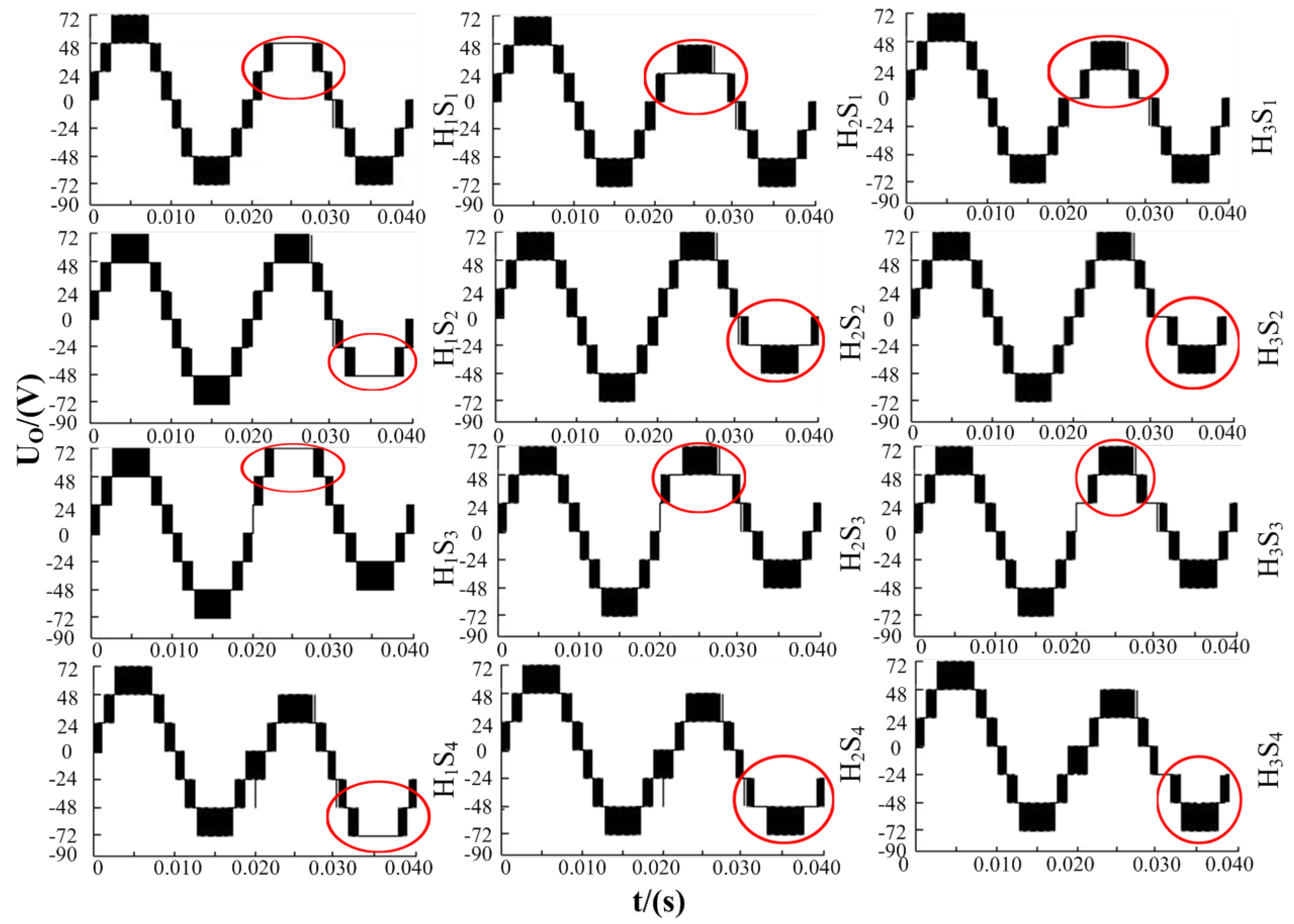
2.1. Fault Signal Analysis
2.2. Structure of the Original Data
2.3. Problem Description in CHMI
3. PCR Method
3.1. PCA-Based Feature Extraction
3.2. Features Rearrangement of Each PC
3.3. New Projection Matrix Rebuilding
4. Fault Diagnosis Strategy Based on PCR
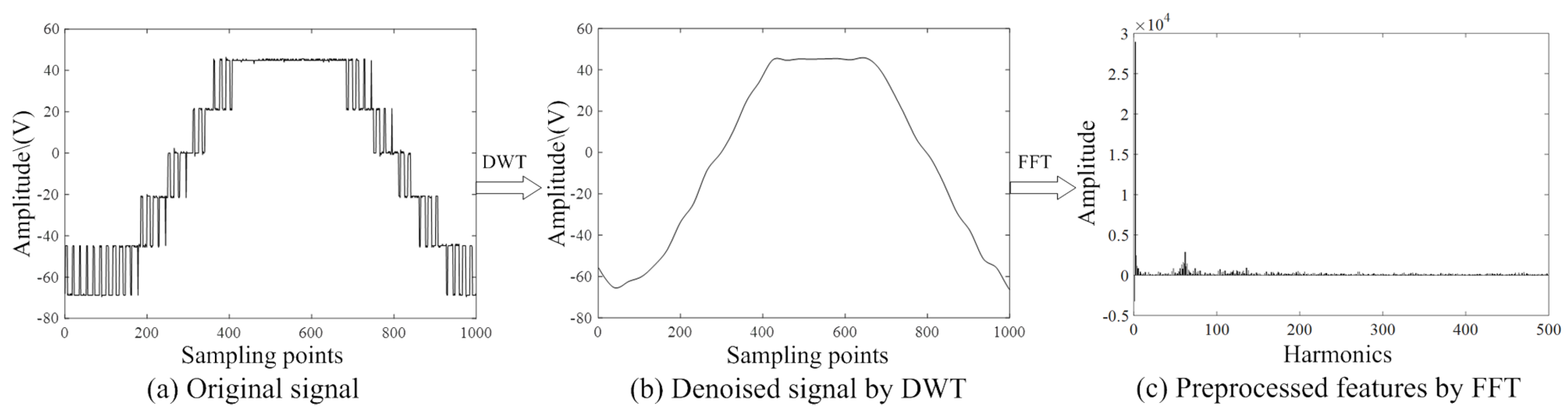
4.1. DWT-Based Signal Denoising
- (1)
- The original data are decomposed into layers with Symlet wavelet function [28].
- (2)
- The denoised data are reconstructed with the last layer’s wavelet coefficients corresponding to the low-frequency components.
4.2. FFT-Based Data Preprocessing
- The fault features’ information is not very obvious.
- When there are many sampling points, it is difficult to realize real-time fast diagnosis.
4.3. PCR-Based Feature Representation
- 1)
- Transform the denoised data by FFT and extract the k PCs by PCA.
- 2)
- Select one PC vector.
- 3)
- Calculate the mean values of I categories (9).
- 4)
- Calculate the max length of data interval (11).
- 5)
- Rearrange the PC features (12).
- 6)
- Repeat Steps from 2) to 5) for the next PC vector, until all the k PCs have been rearranged.
- 7)
- Obtain the rearranged matrix (14).
- 8)
- Calculate the new projection matrix (15).
- 1)
- Collect the fault signals.
- 2)
- Denoise the signals and transform them into the frequency domain.
- 3)
- Obtain the real-time features based on the new projection matrix (15).
4.4. BPNN-Based Fault Classification
5. Experimental Analysis
5.1. Parameters Setting
5.1.1. Parameters of the Hardware Platform
5.1.2. Parameters of the Fault Diagnosis Strategy
5.2. Analysis and Comparison
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CHMI | Cascaded H-bridge Multilevel Inverter |
| HS | H-bridge m, Switch |
| PCA | Principal Component Analysis |
| PCR | Principal Components Rearrangement |
| PCs | Principal Components |
| OC | Open Circuit |
| SC | Short Circuit |
References
- Choi, U.M.; Jeong, H.G.; Lee, K.B.; Blaabjerg, F. Method for Detecting an Open-Switch Fault in a Grid-Connected NPC Inverter System. IEEE Trans. Power Electron. 2012, 27, 2726–2739. [Google Scholar] [CrossRef]
- Babaei, E.; Alilu, S.; Laali, S. A New General Topology for Cascaded Multilevel Inverters with Reduced Number of Components Based on Developed H-Bridge. IEEE Trans. Ind. Electron. 2014, 61, 3932–3939. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, D.; Wang, Y.; Wu, B.; Athab, H.S. Power and Voltage Balance Control of a Novel Three-Phase Solid-State Transformer Using Multilevel Cascaded H-Bridge Inverters for Microgrid Applications. IEEE Trans. Power Electron. 2016, 31, 3289–3301. [Google Scholar] [CrossRef]
- Chebabhi, A.; Fellah, M.K.; Kessal, A.; Benkhoris, M.F. A new balancing three level three dimensional space vector modulation strategy for three level neutral point clamped four leg inverter based shunt active power filter controlling by nonlinear back stepping controllers. ISA Trans. 2016, 63, 328–342. [Google Scholar] [CrossRef]
- Babaei, E.; Laali, S.; Bayat, Z. A single-phase cascaded multilevel inverter based on a new basic unit with reduced number of power switches. IEEE Trans. Ind. Electron. 2015, 62, 922–929. [Google Scholar] [CrossRef]
- Amini, J.; Moallem, M. A Fault-Diagnosis and Fault-Tolerant Control Scheme for Flying Capacitor Multilevel Inverters. IEEE Trans. Ind. Electron. 2017, 64, 1818–1826. [Google Scholar] [CrossRef]
- Choi, U.M.; Lee, J.S.; Blaabjerg, F.; Lee, K.B. Open-circuit fault diagnosis and fault-tolerant control for a grid-connected NPC inverter. IEEE Trans. Power Electron. 2016, 31, 7234–7247. [Google Scholar] [CrossRef]
- Potamianos, P.G.; Mitronikas, E.D.; Safacas, A.N. Open-circuit fault diagnosis for matrix converter drives and remedial operation using carrier-based modulation methods. IEEE Trans. Ind. Electron. 2014, 61, 531–545. [Google Scholar] [CrossRef]
- Wang, F.; Wang, Y.; Huang, X.X.; Zhang, Y.K. Fault Diagnosis of Inverter Power Supply Device Based on SVM. In Robotic Welding, Intelligence and Automation; Springer: New York, NY, USA, 2015; pp. 427–436. [Google Scholar]
- Jung, S.M.; Park, J.S.; Kim, H.W.; Cho, K.Y.; Youn, M.J. An MRAS-based diagnosis of open-circuit fault in PWM voltage-source inverters for PM synchronous motor drive systems. IEEE Trans. Power Electron. 2013, 28, 2514–2526. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, W.; Hu, J.; Ma, W. A hybrid intelligent multi-fault detection method for rotating machinery based on RSGWPT, KPCA and Twin SVM. ISA Trans. 2017, 66, 249–261. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhu, Y.; Shi, W.; Sheng, G.; Chen, Y. An improved machine learning scheme for data-driven fault diagnosis of power grid equipment. In Proceedings of the 2015 IEEE 17th International Conference on High Performance Computing and Communications (HPCC), 2015 IEEE 7th International Symposium on Cyberspace Safety and Security (CSS), 2015 IEEE 12th International Conferen on Embedded Software and Systems (ICESS), New York, NY, USA, 24–26 August 2015; pp. 1737–1742. [Google Scholar]
- Cai, B.; Zhao, Y.; Liu, H.; Xie, M. A data-driven fault diagnosis methodology in three-phase inverters for PMSM drive systems. IEEE Trans. Power Electron. 2017, 32, 5590–5600. [Google Scholar] [CrossRef]
- Tang, Q.; Dai, J.; Liu, J.; Liu, C.; Liu, Y.; Ren, C. Quantitative detection of defects based on Markov–PCA–BP algorithm using pulsed infrared thermography technology. Infrared Phys. Technol. 2016, 77, 144–148. [Google Scholar] [CrossRef]
- Hao, X.; Jian, Z.; Jie, Q.; Tianzhen, W.; Jingang, H. RPCA-SVM fault diagnosis strategy of cascaded H-bridge multilevel inverters. In Proceedings of the 2014 International Conference on Green Energy, Sfas, Tunisia, 25–27 March 2014; pp. 164–169. [Google Scholar]
- Ni, J.; Zhang, C.; Yang, S.X. An adaptive approach based on KPCA and SVM for real-time fault diagnosis of HVCBs. IEEE Trans. Power Deliv. 2011, 26, 1960–1971. [Google Scholar] [CrossRef]
- Wang, T.Z.; Tang, T.H.; Wen, C.L.; Huang, H.Q. Relative principal component analysis algorithm and its application in fault detection. J. Syst. Simul. 2007, 13, 004. [Google Scholar]
- Geiger, B.C.; Kubin, G. Relative information loss in the PCA. In Proceedings of the 2012 IEEE Information Theory Workshop (ITW), Lausanne, Switzerland, 3–7 September 2012; pp. 562–566. [Google Scholar]
- Lv, Z.; Yan, X.; Jiang, Q. Batch process monitoring based on multiple-phase online sorting principal component analysis. ISA Trans. 2016, 64, 342–352. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Park, J.H.; Liu, Y. Differential feature based hierarchical PCA fault detection method for dynamic fault. Neurocomputing 2016, 202, 27–35. [Google Scholar] [CrossRef]
- Zhou, N.; Cheng, H.; Pedrycz, W.; Zhang, Y.; Liu, H. Discriminative sparse subspace learning and its application to unsupervised feature selection. ISA Trans. 2016, 61, 104–118. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Qi, J.; Xu, H.; Wang, Y.; Liu, L.; Gao, D. Fault diagnosis method based on FFT-RPCA-SVM for cascaded-multilevel inverter. ISA Trans. 2016, 60, 156–163. [Google Scholar] [CrossRef] [PubMed]
- Shu, C.; Ya-Ting, C.; Tian-Jian, Y.; Xun, W. A novel diagnostic technique for open-circuited faults of inverters based on output line-to-line voltage model. IEEE Trans. Ind. Electron. 2016, 63, 4412–4421. [Google Scholar] [CrossRef]
- Hao, X.; Tianzhen, W.; Tianhao, T.; Benbouzid, M. A PCA-mRVM fault diagnosis strategy and its Application in CHMLIS. In Proceedings of the IECON 2014—40th Annual Conference of the IEEEIndustrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 1124–1130. [Google Scholar]
- Zhang, S.; Tang, Q.; Lin, Y.; Tang, Y. Fault detection of feed water treatment process using PCA-WD with parameter optimization. ISA Trans. 2017, 68, 313–326. [Google Scholar] [CrossRef] [PubMed]
- Vijayakumari, B.; Devi, J.G.; Mathi, M.I. Analysis of noise removal in ECG signal using symlet wavelet. In Proceedings of the 2016 International Conference on Computing Technologies and Intelligent Data Engineering (ICCTIDE2016), Tamilnadu, India, 7–9 January 2016; pp. 1–6. [Google Scholar]
- Ellmauthaler, A.; Pagliari, C.L.; da Silva, E.A. Multiscale image fusion using the undecimated wavelet transform with spectral factorization and nonorthogonal filter banks. IEEE Trans. Image Process. 2013, 22, 1005–1017. [Google Scholar] [CrossRef] [PubMed]
- Shete, S.; Shriram, R. Comparison of Sub-band Decomposition and Reconstruction of EEG Signal by Daubechies9 and Symlet9 Wavelet. In Proceedings of the 2014 Fourth International Conference on Communication Systems and Network Technologies (CSNT), Gwalior, India, 7–9 April 2014; pp. 856–861. [Google Scholar]
- Meher, P.K.; Mohanty, B.K.; Patel, S.K.; Ganguly, S.; Srikanthan, T. Efficient VLSI architecture for decimation-in-time fast Fourier transform of real-valued data. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 2836–2845. [Google Scholar] [CrossRef]
- Chang, H.H.; Linh, N.V. Statistical Feature Extraction for Fault Locations in Nonintrusive Fault Detection of Low Voltage Distribution Systems. Energies 2017, 10, 611. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Z.; Yin, C. Data-driven modeling for UGI gasification processes via an enhanced genetic BP neural network with link switches. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2718–2729. [Google Scholar] [CrossRef]
- Yin, Z.; Hou, J. Recent advances on SVM based fault diagnosis and process monitoring in complicated industrial processes. Neurocomputing 2016, 174, 643–650. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, Z.; Wu, X.; Li, N.; Chen, W.; Lin, J. Health condition identification of multi-stage planetary gearboxes using a mRVM-based method. Mech. Syst. Signal Process. 2015, 60, 289–300. [Google Scholar] [CrossRef]
- Peng, T.; Zhou, J.; Zhang, C.; Fu, W. Streamflow Forecasting Using Empirical Wavelet Transform and Artificial Neural Networks. Water 2017, 9, 406. [Google Scholar] [CrossRef]
- Tsai, J.T.; Chang, C.C.; Chen, W.P.; Chou, J.H. Data-Driven Modeling Using System Integration Scaling Factors and Positioning Performance of an Exposure Machine System. IEEE Access 2017, 5, 7826–7838. [Google Scholar] [CrossRef]
- Vargas, R.; Figueroa, A.; DeLeon, S.; Aguayo, J.; Hernandez, L.; Rodriguez, M. Analysis of Minimum Modulation for the 9-Level Multilevel Inverter in Asymmetric Structure. IEEE Lat. Am. Trans. 2015, 13, 2851–2858. [Google Scholar] [CrossRef]
- Wang, T.; Xu, H.; Han, J.; Elbouchikhi, E.; Benbouzid, M.E.H. Cascaded H-bridge multilevel inverter system fault diagnosis using a PCA and multiclass relevance vector machine approach. IEEE Trans. Power Electron. 2015, 30, 7006–7018. [Google Scholar] [CrossRef]
- Yan, Y.; Li, J.; Gao, D.W. Condition parameter modeling for anomaly detection in wind turbines. Energies 2014, 7, 3104–3120. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Fault | Category Labels |
|---|---|---|
| 1 | Normal | [1,0,0,0,0,0,0,0,0,…,0,0,0,0] |
| 2 | H-bridge 1, Switch 1 Open Circuit (HS OC) | [0,1,0,0,0,0,0,0,0,…,0,0,0,0] |
| 3 | HS OC | [0,0,1,0,0,0,0,0,0,…,0,0,0,0] |
| 4 | HS OC | [0,0,0,1,0,0,0,0,0,…,0,0,0,0] |
| 5 | HS OC | [0,0,0,0,1,0,0,0,0,…,0,0,0,0] |
| 6 | HS OC | [0,0,0,0,0,1,0,0,0,…,0,0,0,0] |
| 7 | HS OC | [0,0,0,0,0,0,1,0,0,…,0,0,0,0] |
| 8 | HS OC | [0,0,0,0,0,0,0,1,0,…,0,0,0,0] |
| 9 | HS OC | [0,0,0,0,0,0,0,0,1,…,0,0,0,0] |
| ⋯ | ⋯ | ⋯ |
| 4m−2 | HS OC | [0,0,0,0,0,0,0,0,0,…,1,0,0,0] |
| 4m−1 | HS OC | [0,0,0,0,0,0,0,0,0,…,0,1,0,0] |
| 4m | HS OC | [0,0,0,0,0,0,0,0,0,…,0,0,1,0] |
| 4m+1 | HS OC | [0,0,0,0,0,0,0,0,0,…,0,0,0,1] |
| Notation | Description | Value/Product Model |
|---|---|---|
| Voltage of DC sources | 24 V | |
| Load | Impedance of the load in Cascaded H-bridge Multilevel Inverter (CHMI) | |
| Voltage sampling unit | CHV-25P/200 | |
| Insulated Gate Bipolar Transistor (IGBT) | Switching device | AUIRGP35B60PD |
| Optocoupler | Drive isolation modules | TLP250 |
| Digital Signal Processor (DSP) | Controlling chip | TMSF28335 |
| Oscilloscope | For monitoring and data acquisition | TDS 1012C-EDU |
| 7-level CHMI | Main circuit of CHMI | With 3 H-bridges |
| Notation | Description | Value/Product Model |
|---|---|---|
| M | Number of all the observations | 5200 |
| N | Sampling points in each observation | 1000 |
| I | Number of fault categories | 13 |
| J | Observations in each category | 400 |
| Wavelet function | sym8 | |
| Decomposition layers by Discrete Wavelet Transform (DWT) | 5 | |
| Modulation ratio of Sinusoidal Pulse Width Modulation (SPWM) | 0.85–0.95 | |
| SPWM | Method of driving switching devices | Phase Disposition SPWM [36] |
| Switching frequency | 1 kHz | |
| Experimental sample frequency | 50 kHz | |
| Cumulative Percentage of Variance (CPV) | CPV value in principal component analysis method | 0.95 |
| Pseudoinverse matrix of X | Singular Value Decomposition (SVD) | |
| The limit of minimum value of S in SVD | ||
| The output layer nodes of Back Propagation Neural Network (BPNN) | 13 | |
| Activation function |
| Items | Fault Diagnosis Strategies and Parameters of BPNN | Test Samples (Groups) | ||||
|---|---|---|---|---|---|---|
| 3 | 50 | 71 | 92 | |||
| Running time (ms) | FFT-BPNN | = 70, = 19, learning rate = 0.50 | 1725 | 1861 | 1710 | 1693 |
| PCA-BPNN | = 8, = 14, learning rate = 0.20 | 923 | 917 | 946 | 904 | |
| FFT-PCA-BPNN | = 2, = 13, learning rate = 0.18 | 561 | 529 | 532 | 595 | |
| PCR-BPNN | = 8, = 14, learning rate = 0.20 | 101 | 129 | 113 | 128 | |
| FFT-PCR-BPNN | = 2, = 13, learning rate = 0.18 | 34.7 | 36.9 | 41.2 | 30.8 | |
| Diagnostic accuracy (%) | FFT-BPNN | Same as above | 82.8 | 81.5 | 81.9 | 80.7 |
| PCA-BPNN | 84.8 | 83.6 | 84.5 | 83.3 | ||
| FFT-PCA-BPNN | 92.9 | 93.5 | 93.1 | 93.2 | ||
| PCR-BPNN | 95.2 | 94.9 | 94.6 | 95.7 | ||
| FFT-PCR-BPNN | 99.5 | 99.7 | 99.3 | 99.6 | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Wang, T.; Tang, T.; Wang, Y. A Principal Components Rearrangement Method for Feature Representation and Its Application to the Fault Diagnosis of CHMI. Energies 2017, 10, 1273. https://doi.org/10.3390/en10091273
Liu Z, Wang T, Tang T, Wang Y. A Principal Components Rearrangement Method for Feature Representation and Its Application to the Fault Diagnosis of CHMI. Energies. 2017; 10(9):1273. https://doi.org/10.3390/en10091273
Chicago/Turabian StyleLiu, Zhuo, Tianzhen Wang, Tianhao Tang, and Yide Wang. 2017. "A Principal Components Rearrangement Method for Feature Representation and Its Application to the Fault Diagnosis of CHMI" Energies 10, no. 9: 1273. https://doi.org/10.3390/en10091273
APA StyleLiu, Z., Wang, T., Tang, T., & Wang, Y. (2017). A Principal Components Rearrangement Method for Feature Representation and Its Application to the Fault Diagnosis of CHMI. Energies, 10(9), 1273. https://doi.org/10.3390/en10091273