
A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles



Abstract
:1. Introduction
2. ZVT AC-DC Converter
2.1. Circuit Description
2.2. Principle of Operation
2.3. SVPWM Technique
3. ZVT AC-DC Converter
- (a)
- The conventional active rectifier switching states are generated using Ma and θc. These are equivalent to the control signals of Figure 2a–c.
- (b)
- Sam, Sbm and Scm, shown in Figure 2i–k, are generated and multiplexed to assign the control signals for each bi-direccional switch.
- (c)
- Sx and Sy, shown in Figure 2d,e, are generated from the active periods of the conventional active rectifier.
- (d)
- An overlap is required to turn on and off the bidirectional switches during the reversal of current iLS.
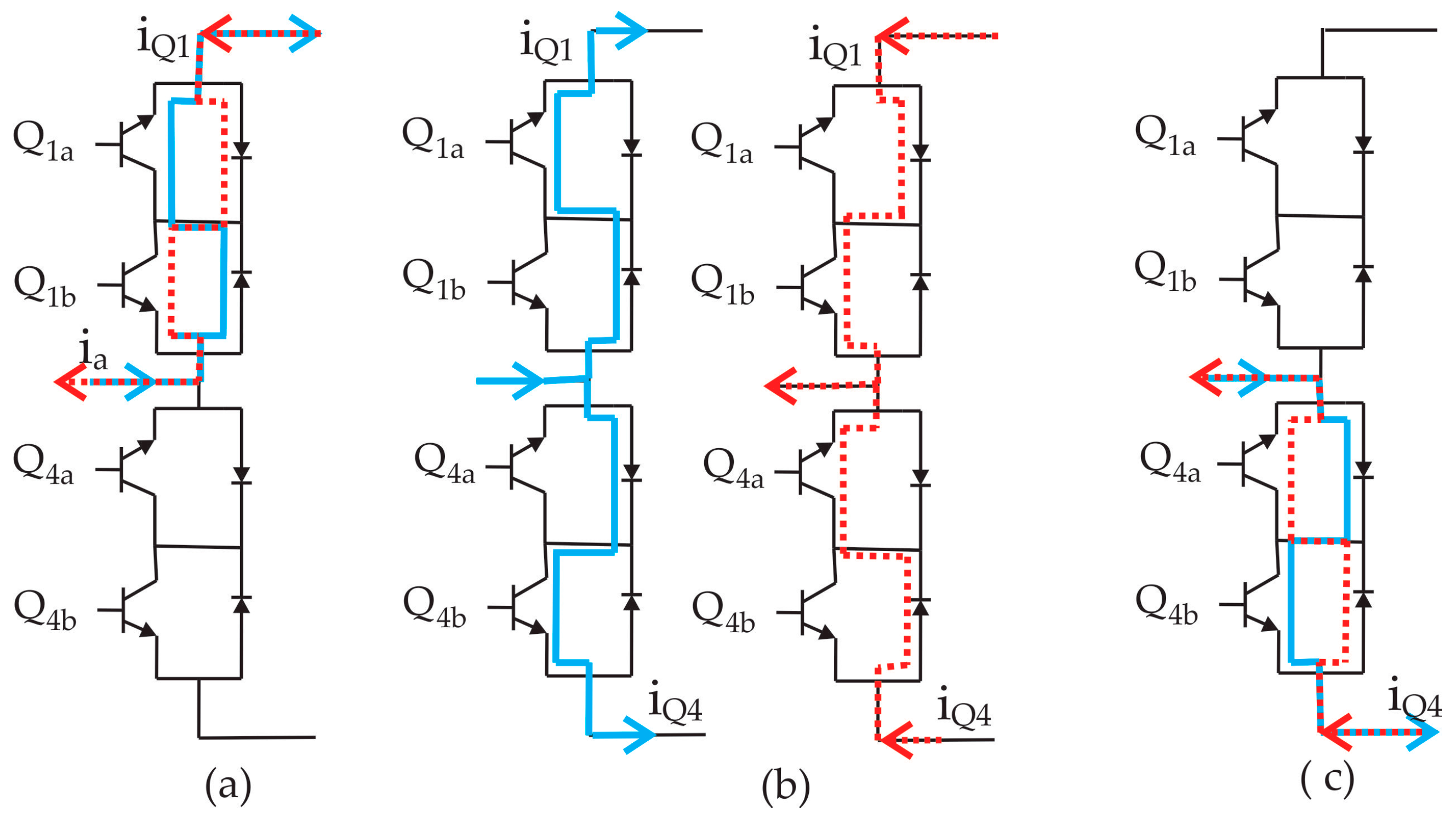
3.1. H-Bridge and Matrix Converter Switching States
3.2. Neutral-to-Active Switching Transition in the Matrix Converter
3.3. Active-to-Active Switching Transition in the Matrix Converter
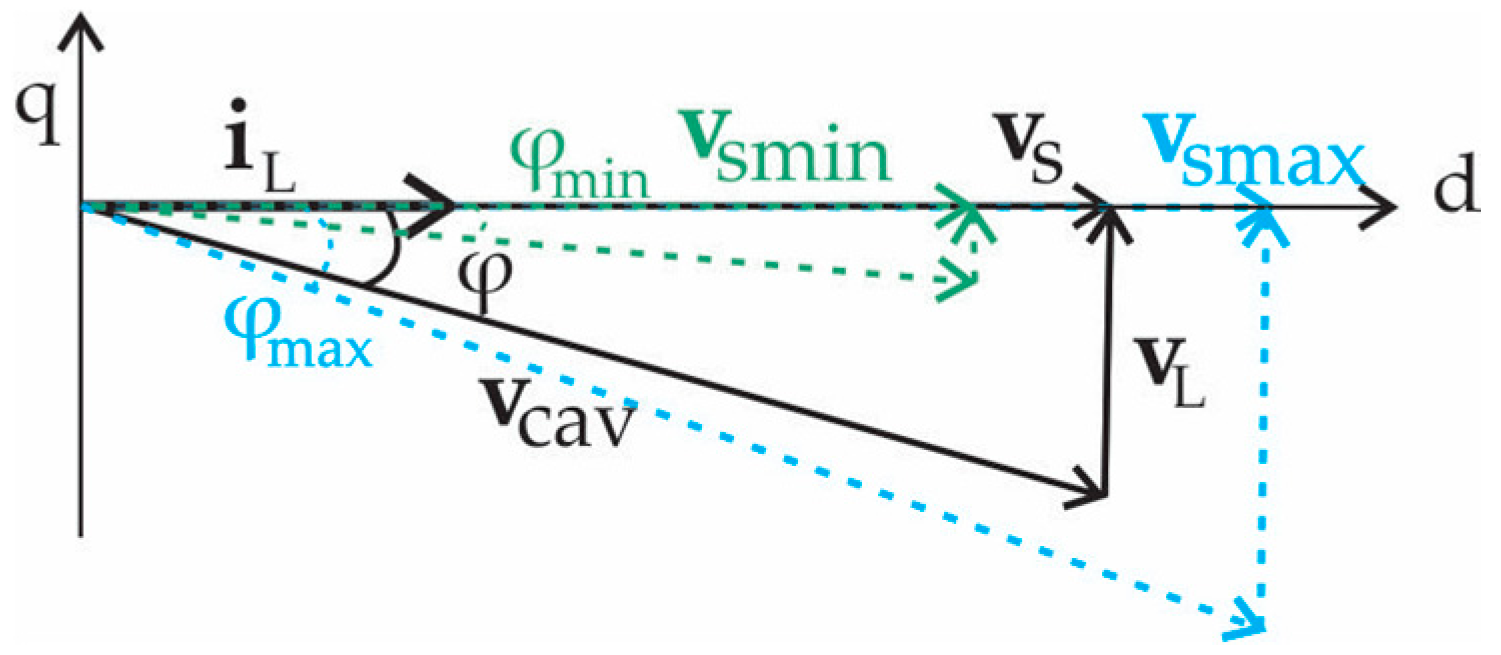
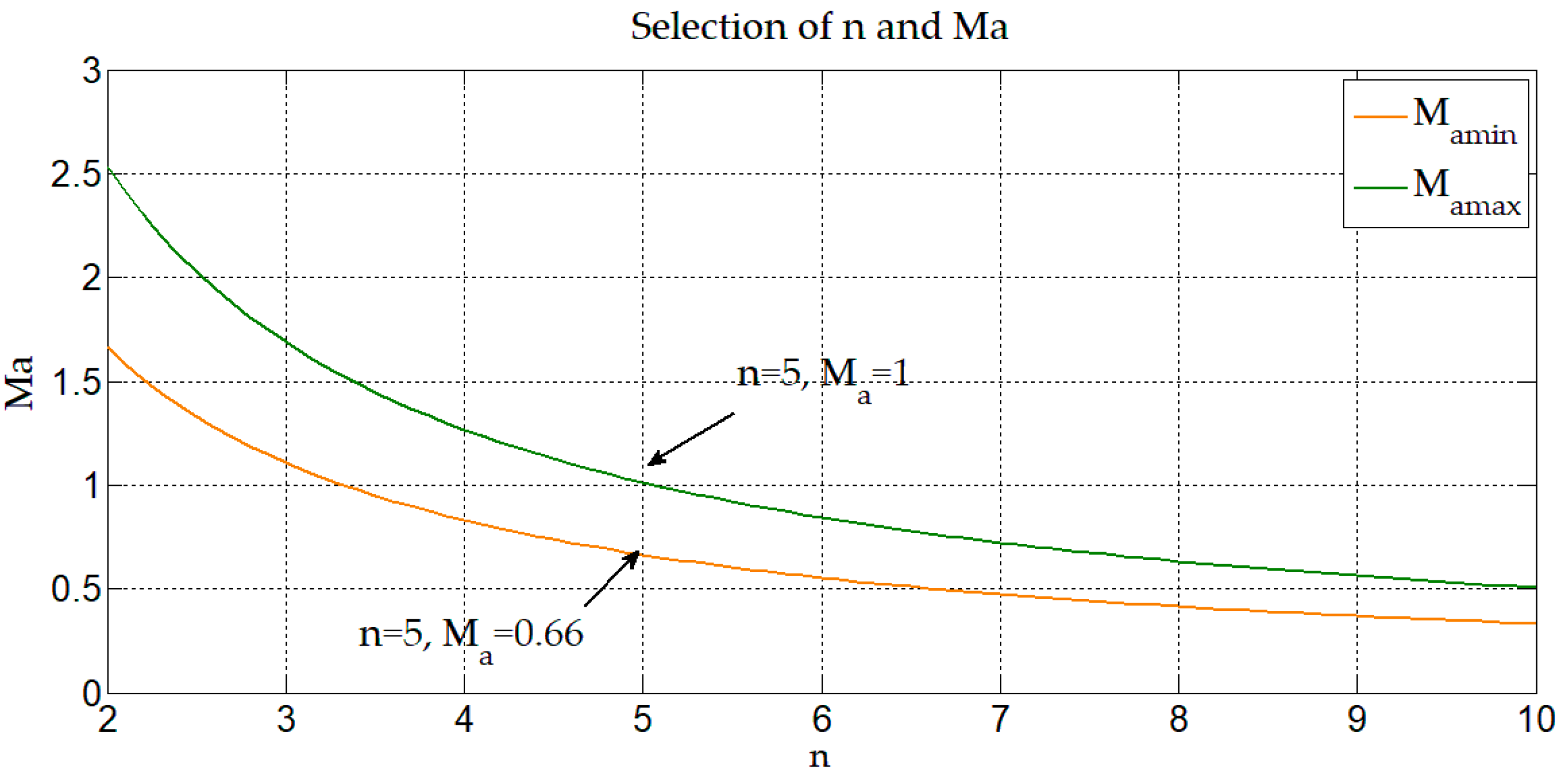
4. Steady-State Analysis and Parameters Selection
5. Numerical Verification
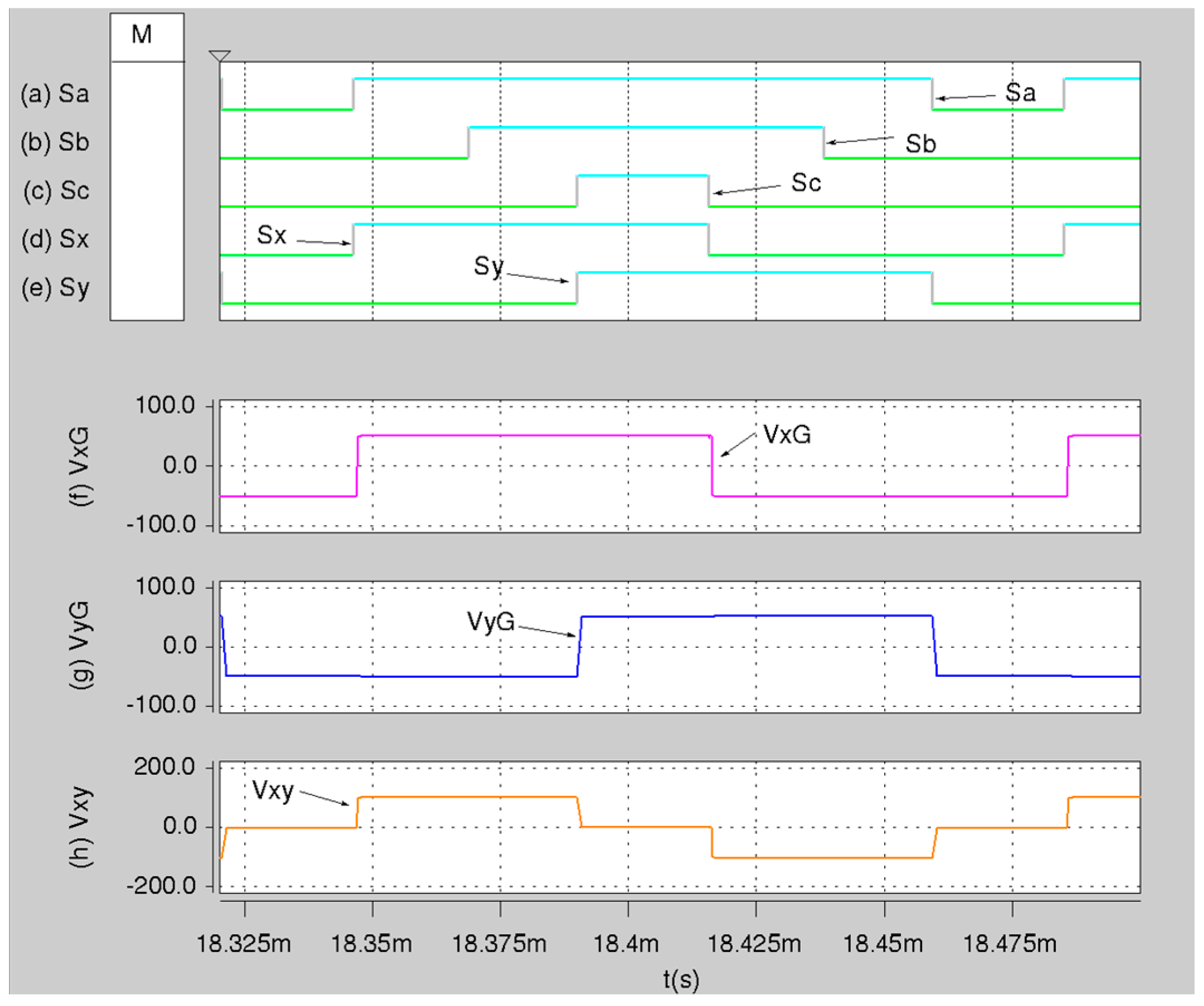
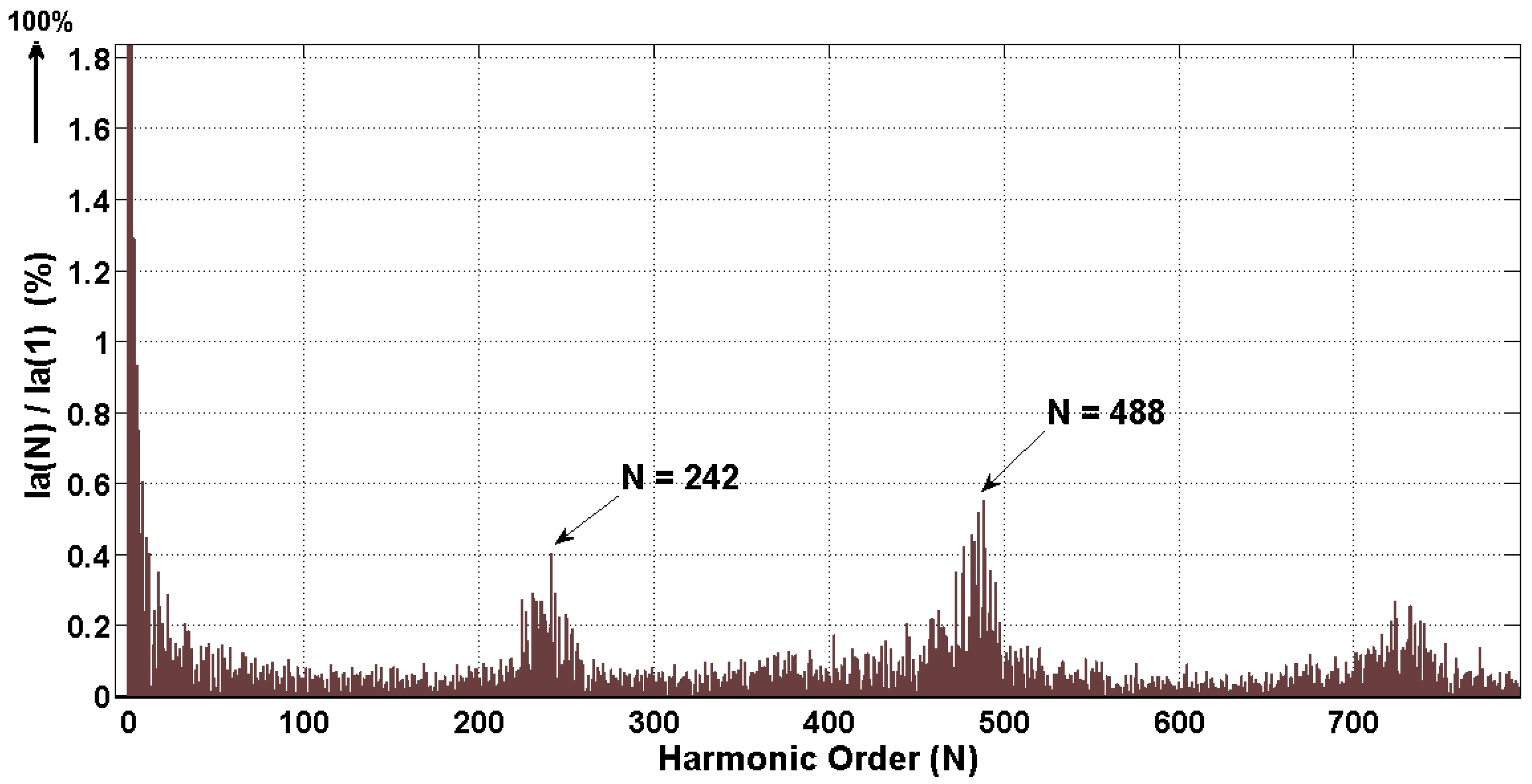
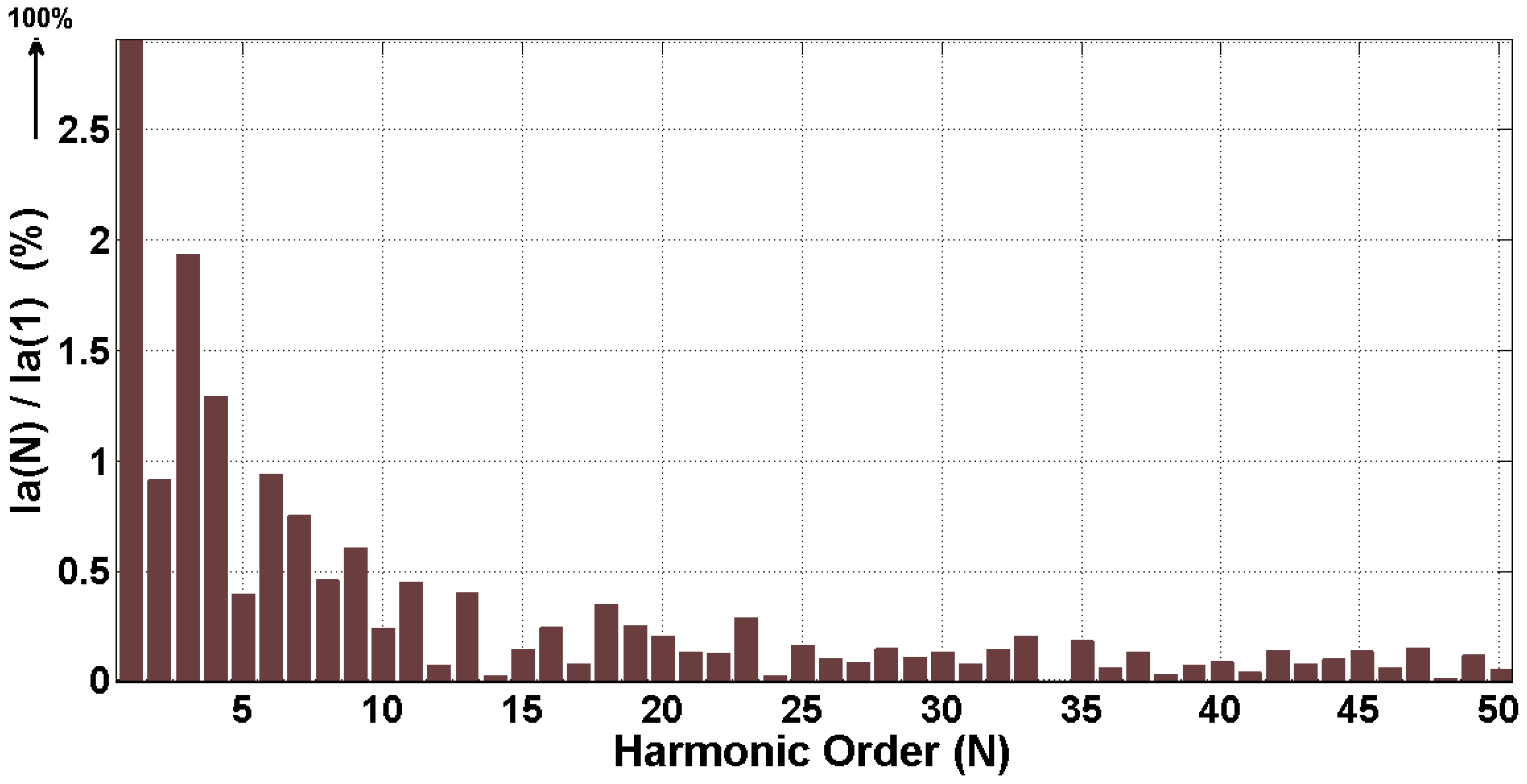
5.1. Verification of the Modified SVPWM
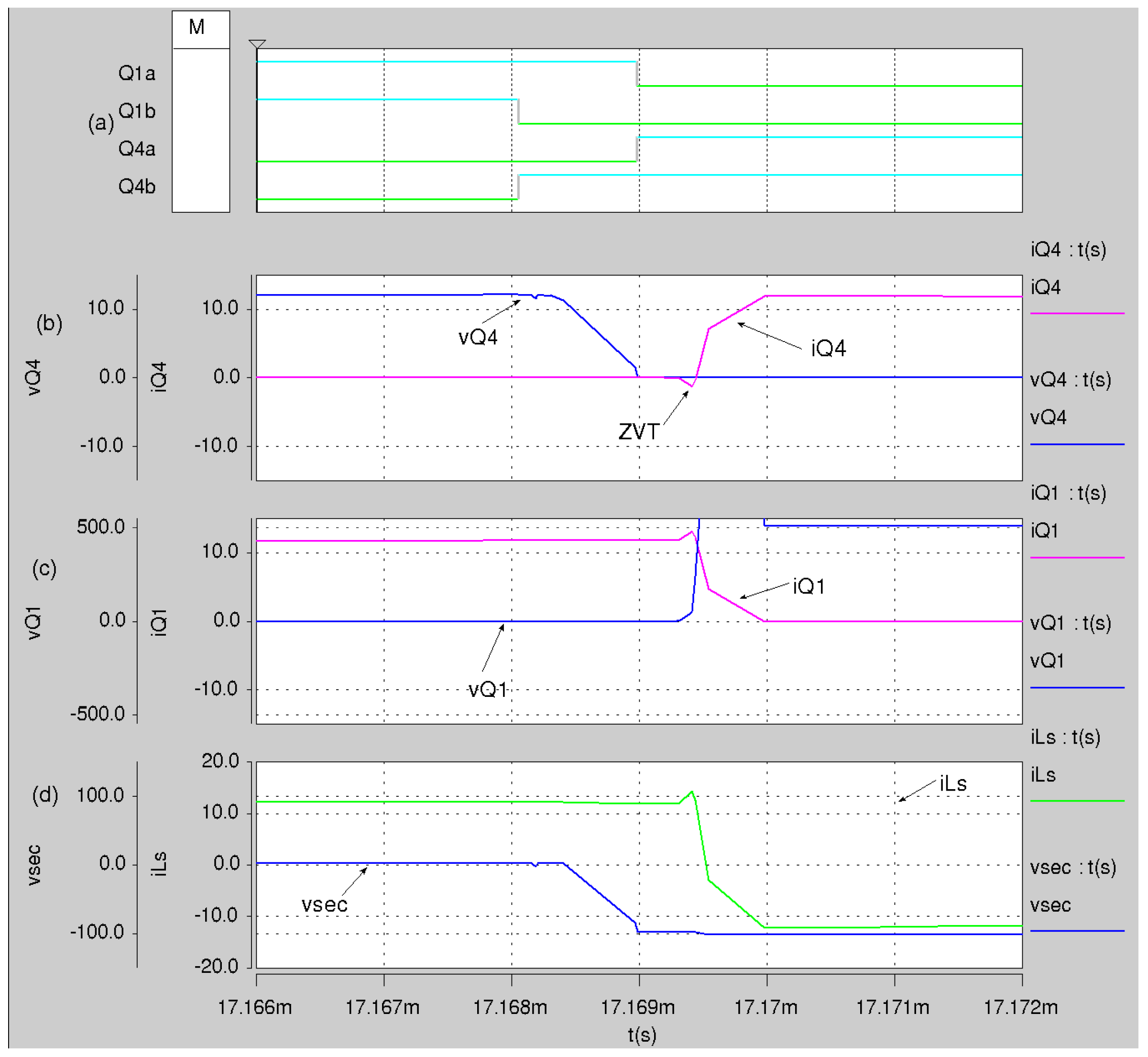
5.2. ZVT Verification
5.3. Steady-State Power Balance Verification
6. Comparison of the Proposed Converter with Other AC-DC Topologies
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Cz1, Cz2 | Zero crossing detector signals |
| ia, ib, ic | Line current in phase a, b and c respectively |
| iL | Three-phase line current vector |
| iLS | Current through the leakage inductance |
| iQ1, iQ4, iQ3, iQ6 | Current through switches Q1, Q4, Q3 and Q6 respectively |
| iprim | Current in the primary side of the transformer |
| isec | Current in the secondary side of the transformer |
| Iprimpk | Peak magnitude of the current in the primary side of the transformer |
| irect | H-bridge output current |
| Irect | Peak magnitude of H-bridge output current |
| L | Line inductor |
| Ls | Transformer leakage inductance |
| Ma | Modulation index |
| Mamin, Mamax | Minimum and maximum modulation index variation |
| n | Transformer turns ratio |
| Pin, Pout | Input and output power |
| Pomin, Pomax | Minimum and maximum output power variation |
| PWMa, PWMb, PWMc | Digital signals obtained from the comparison between conventional active periods and a high-frequency carrier triangular waveform |
| Q1-Q6 | Bi-directional switches in the matrix converter |
| Qa, Qb, Qc, Qd | H-bridge control signals |
| Q1a, Q1b, Q4a, Q4b | Control signals in the first matrix converter leg |
| Q3a, Q3b, Q6a, Q6b | Control signals in the second matrix converter leg |
| R | Output load |
| Sa, Sb, Sc | Conventional active rectifier switching states |
| Sa’, Sb’, Sc’ | Intermediate signals to obtain the matrix converter switching states |
| Sam, Sbm, Scm | Matrix converter switching states |
| Sx, Sy | H-bridge switching states |
| sv1 to sv6 | Active voltage space vectors |
| sv0 | Neutral voltage space vector |
| SQ1 to SQ6 | Vector of matrix converter switching states combinations |
| S1 to S6 | Sectors in the α-β plane |
| T | Switching period |
| Ta, Tb, Tc | Conventional SVPWM active periods |
| tD | Overlap period required in the active-to-active switching transition |
| TovL | Matrix converter legs overlap period |
| tr | Turning off time in the semiconductor devices |
| TSV0H | Short-circuit period in the H-bridge |
| TSV1, TSV2, TSV4, TSV5 | Active times of the space vectors sv1, sv2, sv4 and sv5 respectively |
| va, vb, vc | Phase a, b and c voltages |
| vacG, vbcG, vccG | Matrix converter voltages referred to the G node |
| vcav | Averaged converter voltage vector |
| Vcpk | Peak magnitude of the averaged converter voltage vector |
| vcavd, vcavq | Converter d-q-axis voltage |
| Vcpkmin, Vcpkmax | Minimum and maximum peak converter voltage variation |
| vL | Line inductor voltage vector |
| VLpk | Peak magnitude of line inductor voltage vector |
| Vo | Output voltage |
| vprim | Voltage in the primary side of the transformer |
| vQ1, vQ4 | Voltages in switches Q1 and Q4 respectively |
| vsec | Voltage in the secondary side of the transformer |
| vs | Three-phase source voltage vector |
| vsmin, vsmax | Minimum and maximum three-phase source voltage vector variation |
| Vspk | Peak magnitude of the three-phase source voltage vector |
| Vspkmin, Vspkmax | Minimum and maximum voltage supply variation |
| vxy | Voltage generated by the H bridge |
| vxG, vyG | H-bridge legs voltages referred to the G node |
| θc | Converter operation phase |
| θs | Source phase |
| φ | Phase between vs ad vcav vectors |
| φmin, φmax | Minimum and maximum phase φ variation |
References
- Fariborz, M.; Wilson, E.; Wiliam, G.D. Efficiency evaluation of single-phase solutions for AC-DC PFC boost converters for plug-in-hybrid electric vehicle battery chargers. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010. [Google Scholar]
- Lingxiao, X.; Zhiyu, S.; Dushan, B.; Paolo, M.; Daniel, D. Dual Active Bridge-Based Battery Charger for Plug-in Hybrid Electric Vehicle with Charging Current Containing Low Frequency Ripple. IEEE Trans. Power Electron. 2015, 30, 7299–7307. [Google Scholar] [CrossRef]
- Muntasir, U.; Wilson, E.; Fariborz, M. A hybrid resonant bridgeless AC-DC power factor correction converter for off-road and neighborhood electric vehicle battery charging. In Proceedings of the Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Hernandez, J.; Ortega, M.; Medina, A. Statistical characterization of harmonic current emission for large photovoltaic plants. Int. Trans. Electr. Energy Syst. 2014, 24, 1134–1150. [Google Scholar] [CrossRef]
- European Committee for Electrotechnical Standardization. Limits for Harmonic Current Emissions; CENELEC: Brussels, Belgium, 1995. [Google Scholar]
- Bhim, S.; Sanjeev, S.; Ambrish, C. Comprehensive Study of Single-Phase AC-DC Power Factor Corrected Converters with High-Frequency Isolation. IEEE Trans. Ind. Inform. 2011, 7, 540–556. [Google Scholar] [CrossRef]
- Rao, S.; Berthold, F.; Pandurangavittal, K.; Benjamin, B.; David, B.; Sheldon, W.; Abdellatif, M. Plug-in Hybrid Electric Vehicle energy system using home-to-vehicle and vehicle-to-home: Optimizaton of power converter operation. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 16–19 June 2013. [Google Scholar]
- Fariborz, M.; Wilson, E. Overview of wireless power transfer technologies for electric vehicle battery charging. IET Power Electr. 2014, 7, 60–66. [Google Scholar] [CrossRef]
- Deepak, R.; Vamsi, K.; Akash, R.; Najath, A.A.; Sheldon, S.W. Modified resonant converters for contactless capacitive power transfer systems used in EV charging applications. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016. [Google Scholar]
- Chia-Ho, O.; Hao, L.; Weihua, Z. Investigating Wireless Charging and Mobility of Electric Vehicles on Electricity Market. IEEE Trans. Ind. Electron. 2015, 5, 3123–3133. [Google Scholar] [CrossRef]
- Chunyang, G.; Krishnamoorthy, H.; Prasad, N.; Yongdong, L. A novel medium-frequency-transformer isolated matrix converter for wind power conversion applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Peschiera, B.; Williamson, S. Review and comparison of inductive charging power electronic converter topologies for electric and plug-in hybrid electric vehicles. In Proceedings of the IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 16–19 June 2013. [Google Scholar]
- Zhao, J.; Jiang, J.; Yang, X. AC-DC-DC isolated converter with bidirectional power flow capability. IET Power Electron. 2010, 4, 472–479. [Google Scholar] [CrossRef]
- Rizzoli, G.; Zarri, M.; Mengoni, A.; Tani, A.; Attilio, L.; Serra, G.; Casadei, D. Comparison between an AC-DC matrix converter and an interleaved DC-DC converter with power factor corrector for plug-in electric vehicles. In Proceedings of the IEEE International Electric Vehicle Conference, Florence, Italy, 17–19 December 2014. [Google Scholar]
- Whitaker, B.; Barkley, A.; Cole, Z. A High-Density, High-Efficiency, Isolated On-Board Vehicle Battery Charger Utilizing Silicon Carbide Power Devices. IEEE Trans. Power Electron. 2014, 29, 2606–2617. [Google Scholar] [CrossRef]
- Bojarski, M.; Asa, E.; Colak, K.; Dariusz, C. Analysis and Control of Multi-Phase Inductively Coupled Resonant Converter for Wireless Electric Vehicle Charger Applications. IEEE Trans. Transp. Electr. 2017, 3, 312–320. [Google Scholar] [CrossRef]
- Il-Oun, L. Hybrid PWM-Resonant Converter for Electric Vehicle On-Board Battery Chargers. IEEE Trans. Power Electron. 2016, 31, 3639–3649. [Google Scholar] [CrossRef]
- Dong-Gyun, W.; Yun-Sung, K.; Byoung-Kuk, L. Effect of PWM schemes on integrated battery charger for plug-in hybrid electric vehicles: Performance, power factor, and efficiency. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Fort Worth, TX, USA, 16–20 March 2014. [Google Scholar]
- Onur, S.; Erkan, M. Investigating DC link current ripple and PWM modulation methods in Electric Vehicles. In Proceedings of the 3rd International Conference on Electric Power and Energy Conversion Systems, Istanbul, Turkey, 2–4 October 2013. [Google Scholar]
- Grahame, D.; Lipo, T. Modulation of Three-Phase Voltage Source Inverters. In Pulse Width Modulation for Power Converter Principles and Practice; Wiley-IEEE Press: Piscataway, NJ, USA, 2003; pp. 215–258. ISBN 9780470546284. [Google Scholar]
- Forsyth, A.J.; Mollov, S.V. Modelling and control of DC-DC converters. Power Eng. J. 1998, 12, 229–236. [Google Scholar] [CrossRef]
- Jianyong, L.; Yitong, C.; Deliang, L.; Lin, G.; Fei, D.; Fangjun, J. Novel network model for dynamic stray capacitance analysis of planar inductor with nanocrystal magnetic core in high frequency. In Proceedings of the IEEE Conference on Electromagnetic Field Computation, Chicago, IL, USA, 9–12 May 2010. [Google Scholar]
- Pedersen, A.; Martinenas, S.; Andersen, P.; Thomas, M.S.; Henning, S.H. A method for remote control of EV charging by modifying IEC61851 compliant EVSE based PWM signal. In Proceedings of the IEEE International Conference on Smart Grid Communications, Miami, FL, USA, 2–5 November 2015. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching State Combination | Sam, Sbm and Scm States |
|---|---|
| SQ1 | (1, 0, 0) |
| SQ2 | (1, 1, 0) |
| SQ3 | (0, 1, 0) |
| SQ4 | (0, 1, 1) |
| SQ5 | (0, 0, 1) |
| SQ6 | (1, 0, 1) |
| Angle θc | Sector | vprim (+) | vprim (−) |
|---|---|---|---|
| Switching State | Switching State | ||
| 1–60° | S1 | SQ1, SQ2 | SQ4, SQ5 |
| 61–120° | S2 | SQ2, SQ3 | SQ5, SQ6 |
| 121–180° | S3 | SQ3, SQ4 | SQ6, SQ1 |
| 181–240° | S4 | SQ4,SQ5 | SQ1, SQ2 |
| 241–300° | S5 | SQ5, SQ6 | SQ2, SQ3 |
| 301–360° | S6 | SQ6, SQ1 | SQ3, SQ4 |
| Switching State | iprim |
|---|---|
| SQ1 | iprim = ia − ib − ic |
| SQ2 | iprim = ia + ib − ic |
| SQ3 | iprim = ib – ia − ic |
| SQ4 | iprim = ib + ic – ia |
| SQ5 | iprim = ic − ib – ia |
| SQ6 | iprim = ia − ib + ic |
| Parameter | Value |
|---|---|
| Source voltage va, vb and vc | 180 V peak |
| Source frequency | 60 Hz |
| Switching fequency | 7.2 kHz |
| Input inductor L | 3 mH |
| Index modulation Ma | 0.628 |
| Input resistor R | 0.1 Ω |
| Leakage Inductance Ls | 50 µH |
| Turns ratio n | 5:1 |
| Output voltage Vo | 100 V |
| Output Power Po | 5 kW |
| Topology | Proposed AC-DC Modular Converter | Three-Phase PFC Rectifier with DC-DC Converter, [14] | AC-DC Matrix Converter, [14] | Isolated On-Board Vehicle Battery Charger Utilizing SiC Power Devices, [15] | Inductively Coupled Multi-Phase Resonant Wireless Converter, [16] | |
|---|---|---|---|---|---|---|
| Factor | ||||||
| Level | 3 | 2 | 2–3 | 1–2 | 1 | |
| Supply voltage phases | 3 | 3 | 3 | 1 | 1 | |
| Switching Devices | 16 (4 on board) | 12 | 12 | 6 | 6 | |
| THD | 4.40% | <5% | <1% | 4.20% | <5% | |
| Switching losses | Virtual 0 W (ZVT) | 241.1 W | 165.2 W | 0 W (using ZVT) | 0 W (using ZVT) | |
| Switching Frequency | 7.2 kHz | 10 kHz | 10 kHz | 250 kHz | 83–88 kHz | |
| Capability to reverse power flow | Yes | No | Yes | No | No | |
| Possibility to split the converter | Yes | No | No | No | Yes | |
| Output Power | 5–20 kW | 22.6 kW | 20.4 kW | 6.1 kW | 1 kW | |
| Efficiency | 95.8% (estimated) | 97.72% | 96.80% | 94% | 93.34% | |
| Total Volume On-Board Converter | 1700 cm3 (Estimated) | 8430 cm3 | 6668.5 cm3 | 1742 cm3 | 5250 cm3 (Estimated) | |
| Power Density | 10 kW/dm3 (Estimated) | 3.8 kW/dm3 | 4.3 kW/dm3 | 5 kW/dm3 | 192 W/dm3 (Estimated) | |
| Advantages over others | Reduces the size of the converter located on-boar the vehicle. The SVPWM together with ZVT generate high-quality sinusoidal currents with null switching losses | Eliminates harmonics, improves the power factor, great simplicity, stable and reliable operation | The volume of the reactive components is reduced. Passive components are not needed in intermediate steps | The switching frequency is increased, the size and weight is reduced | Full-range regulation from zero to full power without switching losses | |
| Major Drawbacks | The efficiency can be reduced by using the transformer | Need to be followed by a step-down DC-DC converter. Passive components are required in intermediate steps | The converter is on-board the vehicle. When the switching devices reach the temperature of 145°, the maximum output power decreases | The conversion is made by three steps with intermediate passive components. Not suitable for high power applications | Not suitable for high power applications. More than transformers are used, increasing the losses | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramirez-Hernandez, J.; Araujo-Vargas, I.; Rivera, M. A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles. Energies 2017, 10, 1386. https://doi.org/10.3390/en10091386
Ramirez-Hernandez J, Araujo-Vargas I, Rivera M. A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles. Energies. 2017; 10(9):1386. https://doi.org/10.3390/en10091386
Chicago/Turabian StyleRamirez-Hernandez, Jazmin, Ismael Araujo-Vargas, and Marco Rivera. 2017. "A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles" Energies 10, no. 9: 1386. https://doi.org/10.3390/en10091386
APA StyleRamirez-Hernandez, J., Araujo-Vargas, I., & Rivera, M. (2017). A Modular AC-DC Power Converter with Zero Voltage Transition for Electric Vehicles. Energies, 10(9), 1386. https://doi.org/10.3390/en10091386