Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine †



Abstract
:1. Introduction
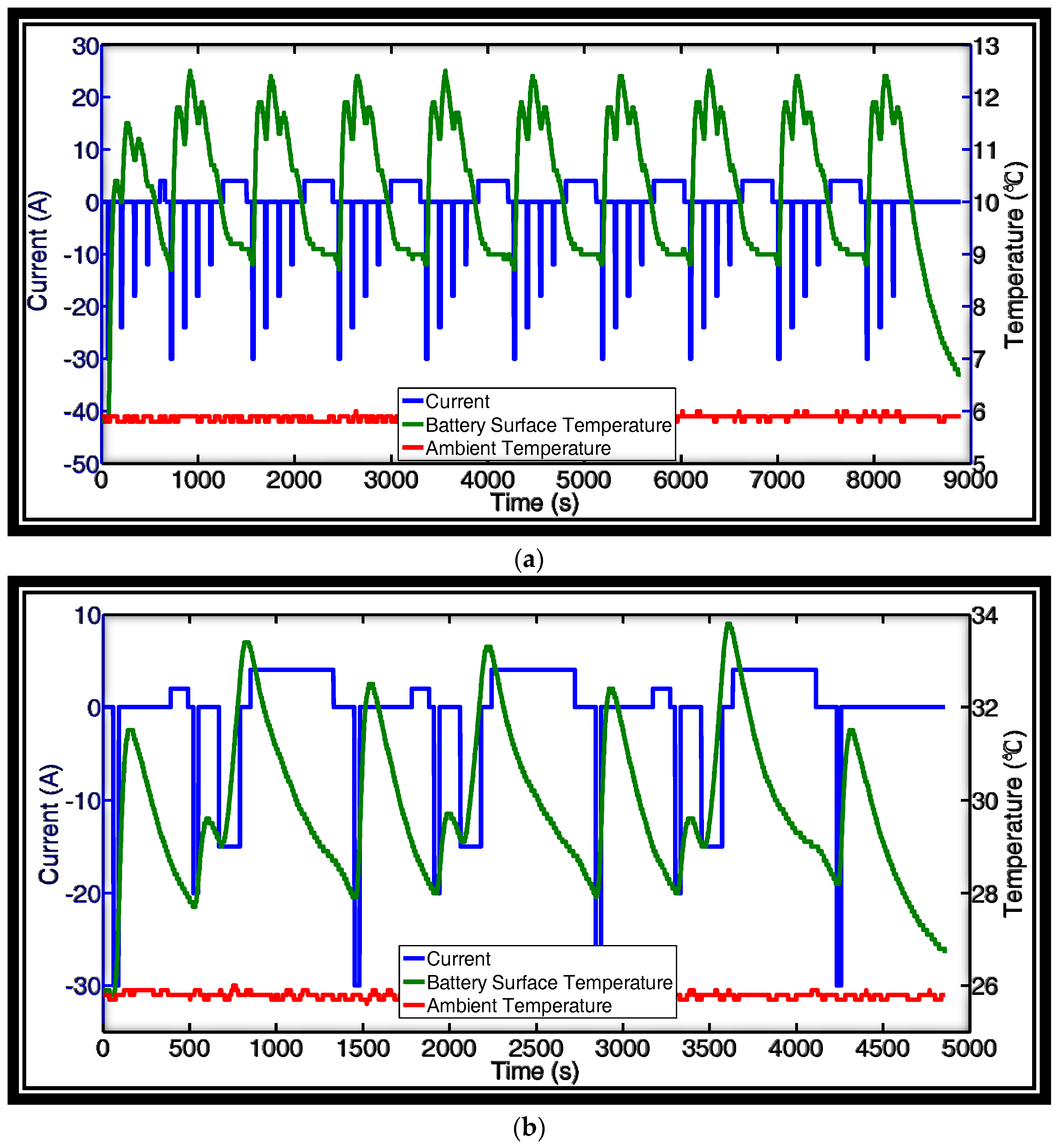
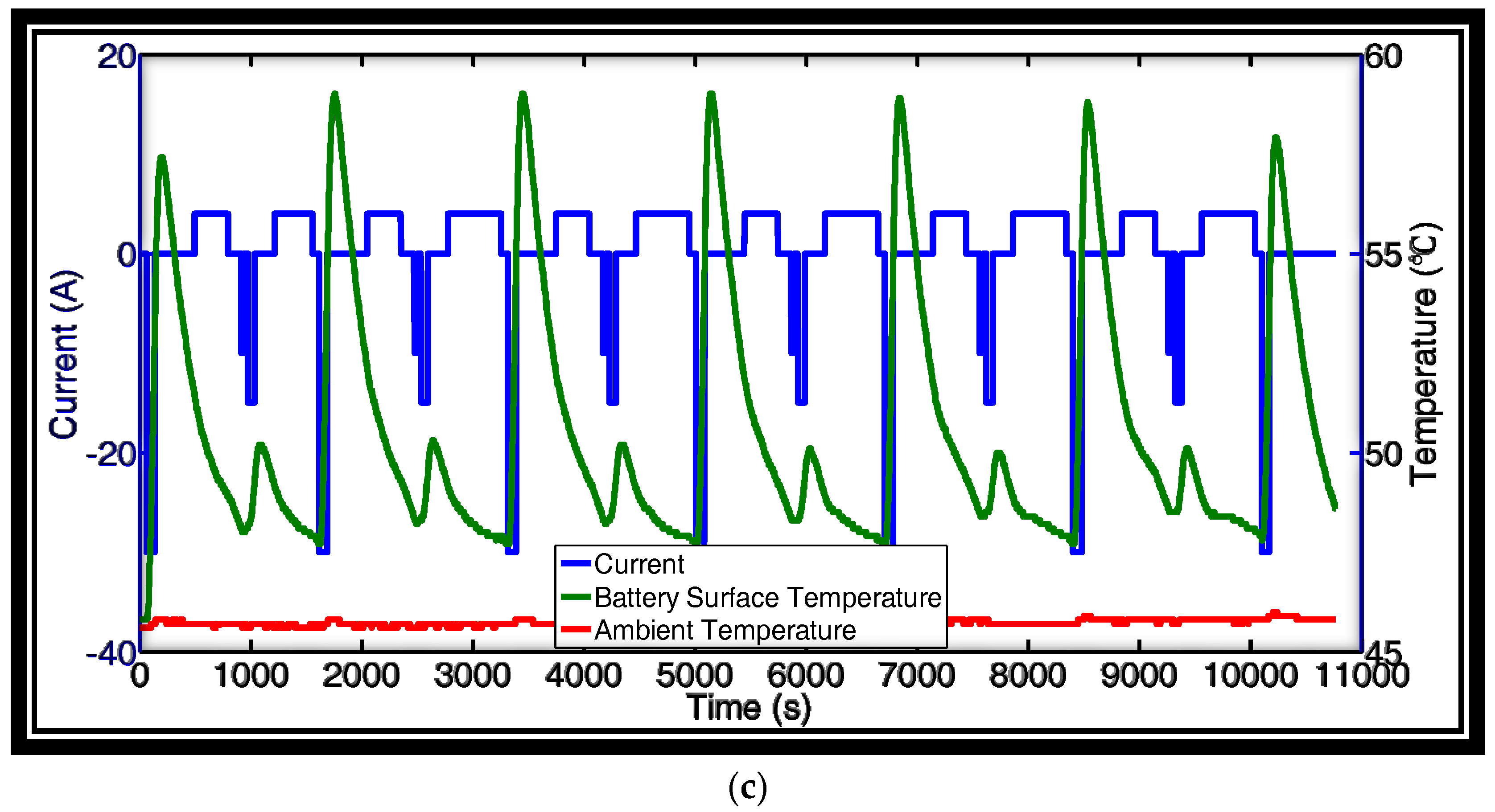
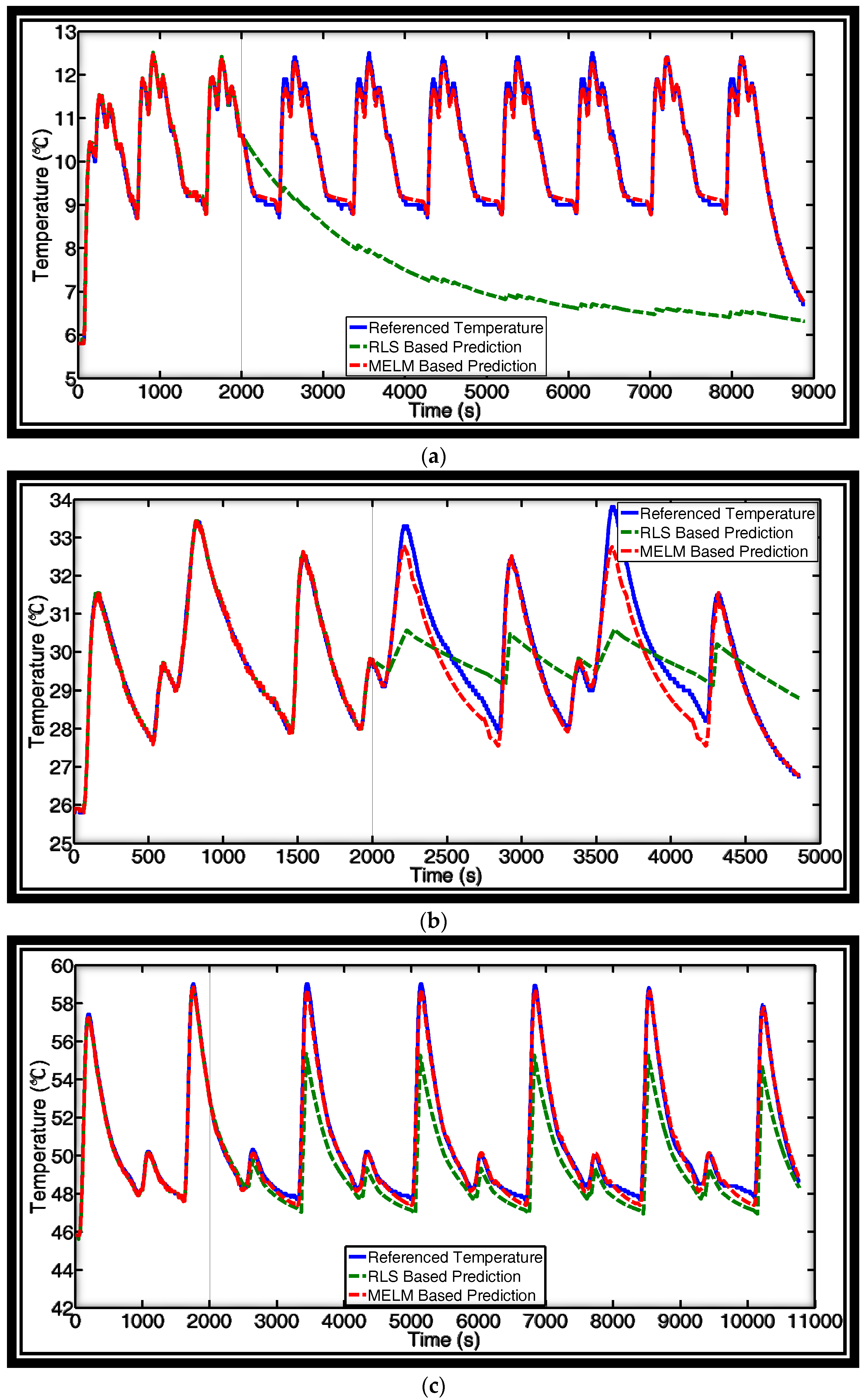
- Temperature: the battery performance and its safety can be influenced significantly by temperature [23,24,25]. When the prediction time is short, it is reasonable to set the battery temperature as the surface temperature. However, for long-term prediction, the battery temperature may change due to the accumulation of the Joule heat [16,26]. Therefore, the battery’s future temperature should be predicted before its long-term voltage and power.
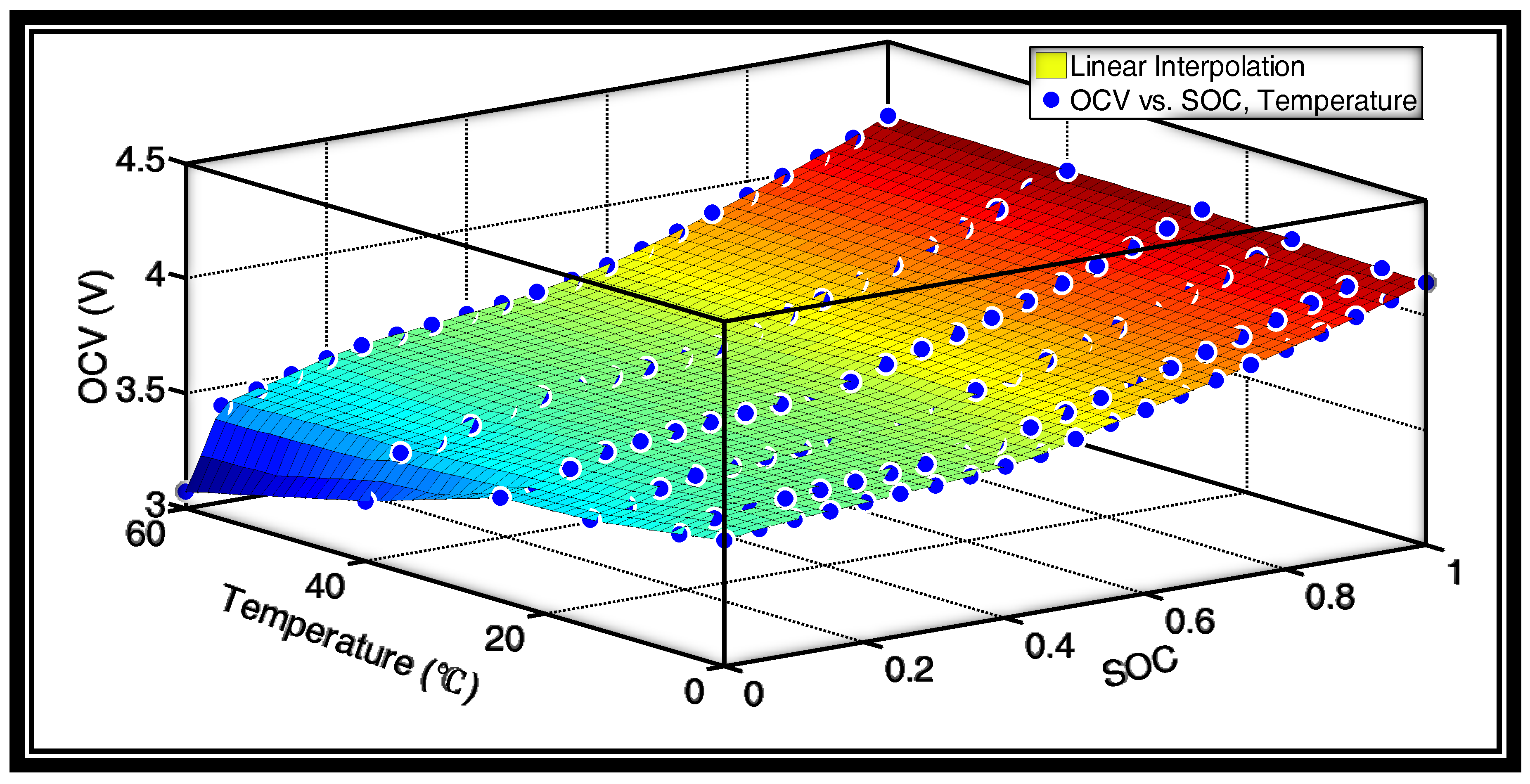
- SOC: the battery OCV, and thus the terminal voltage, is strongly related to the SOC [27,28,29]. For short-term prediction, as long as the capacity change is not significant, the SOC and OCV can be regarded as a constant number [30], which is beneficial for online calculations. However, the SOC change can no longer be neglected if we are doing long-term predictions. It should be noted that estimating the SOC online at changing temperatures is not only difficult, but may also be computationally complex [23,31]. Unfortunately, without an accurate SOC estimation, the initial SOC for the long-term open-loop prediction is no longer accurate, which will lead to a drift in the predicted voltage.
2. Algorithm Design
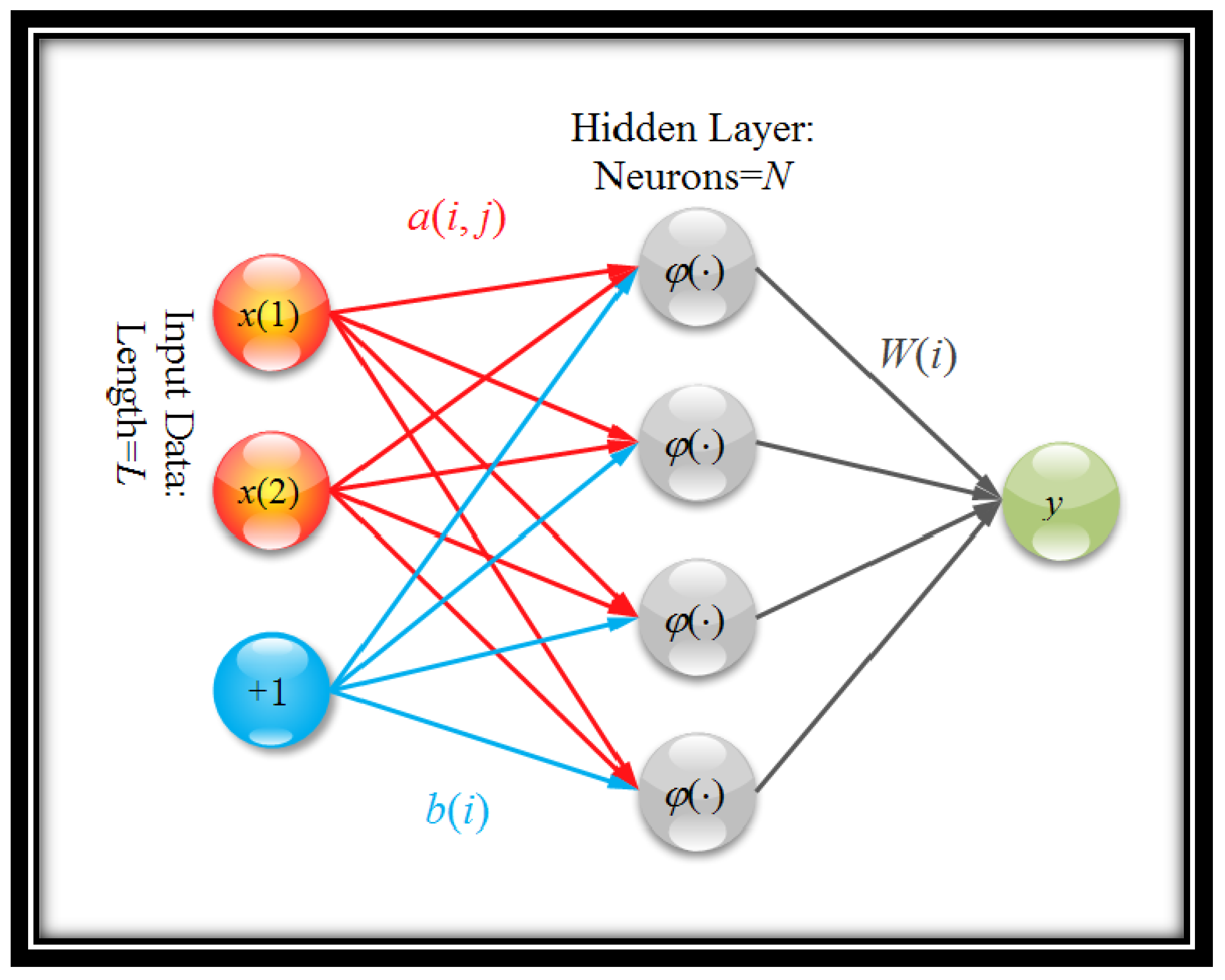
2.1. Conventional Extreme Learning Machine
2.2. Model-Based Extreme Learning Machine
- High model accuracy can be obtained without using complex sub-model structures. This can be beneficial when an accurate system model structure is not available. It should be noted that this is also a benefit of general data-driven methods [35].
- Generalization performance of SLFN can be improved. The conventional logsig() function is only sensitive to input when the input is close to zero; in other words, SLFN may not perform well if the testing data is far from the training data range [33,34]. An (even inaccurate) mechanism model does not have this limitation.
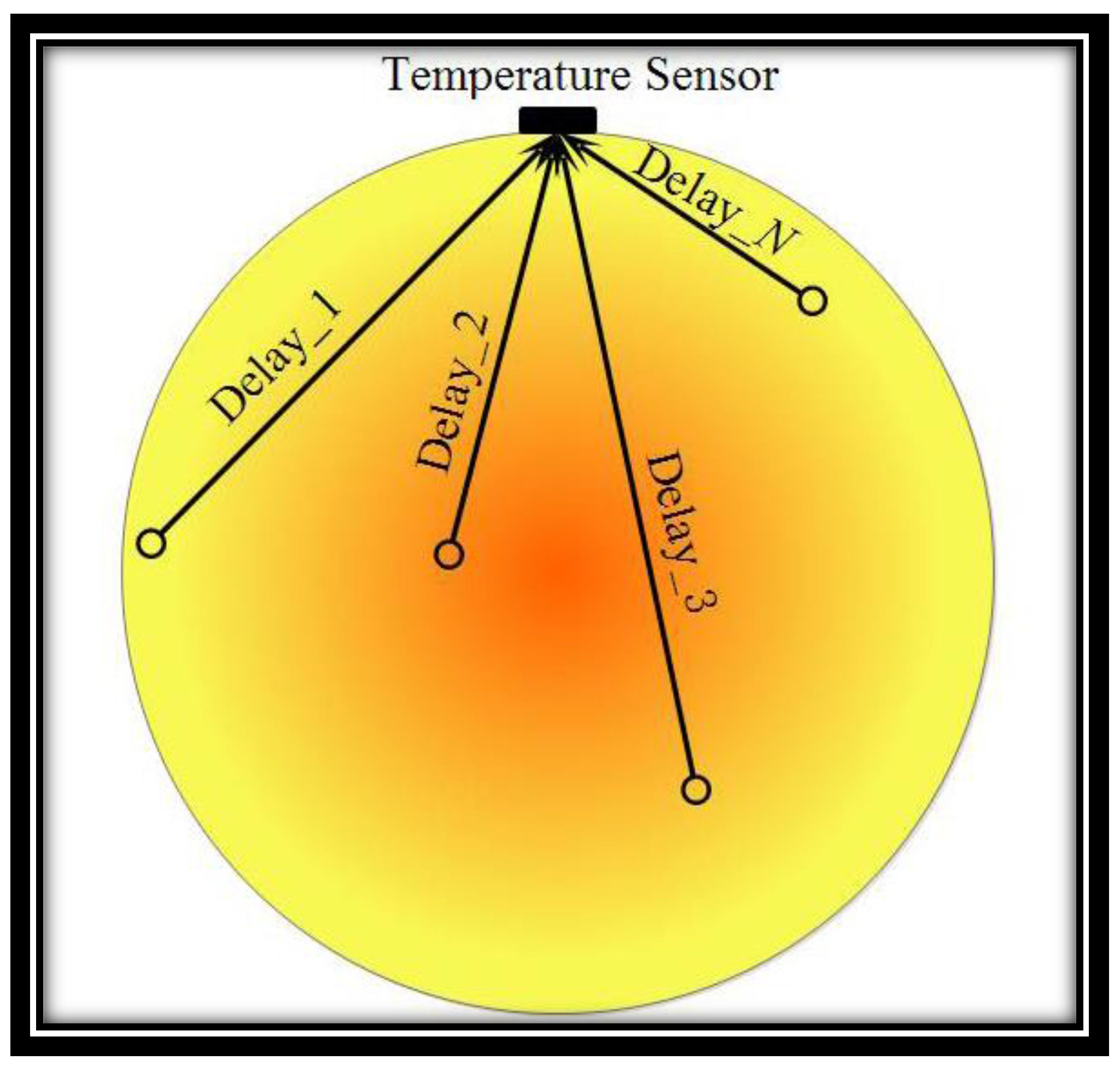
- The model can be represented in a parameter-distributed way through this MELM. In other words, the system is represented by a lot of sub-models with the same structure but different model parameters. A parameter-distributed model usually better describes the real system, as illustrated in Figure 3. The time delay for the heat transferred to the temperature sensor can be different to the heat generated in different parts of the batteries.
2.3. Model Structure
2.3.1. Battery Temperature Model
2.3.2. Battery Equivalent Circuit Model
2.4. Summary
3. Experimental Result
3.1. Experimental Platform
3.2. Model Parameter Selection
3.2.1. Temperature Model
3.2.2. Thevenin Model
3.3. Future Temperature and Power Prediction Results
3.3.1. Temperature Prediction Result
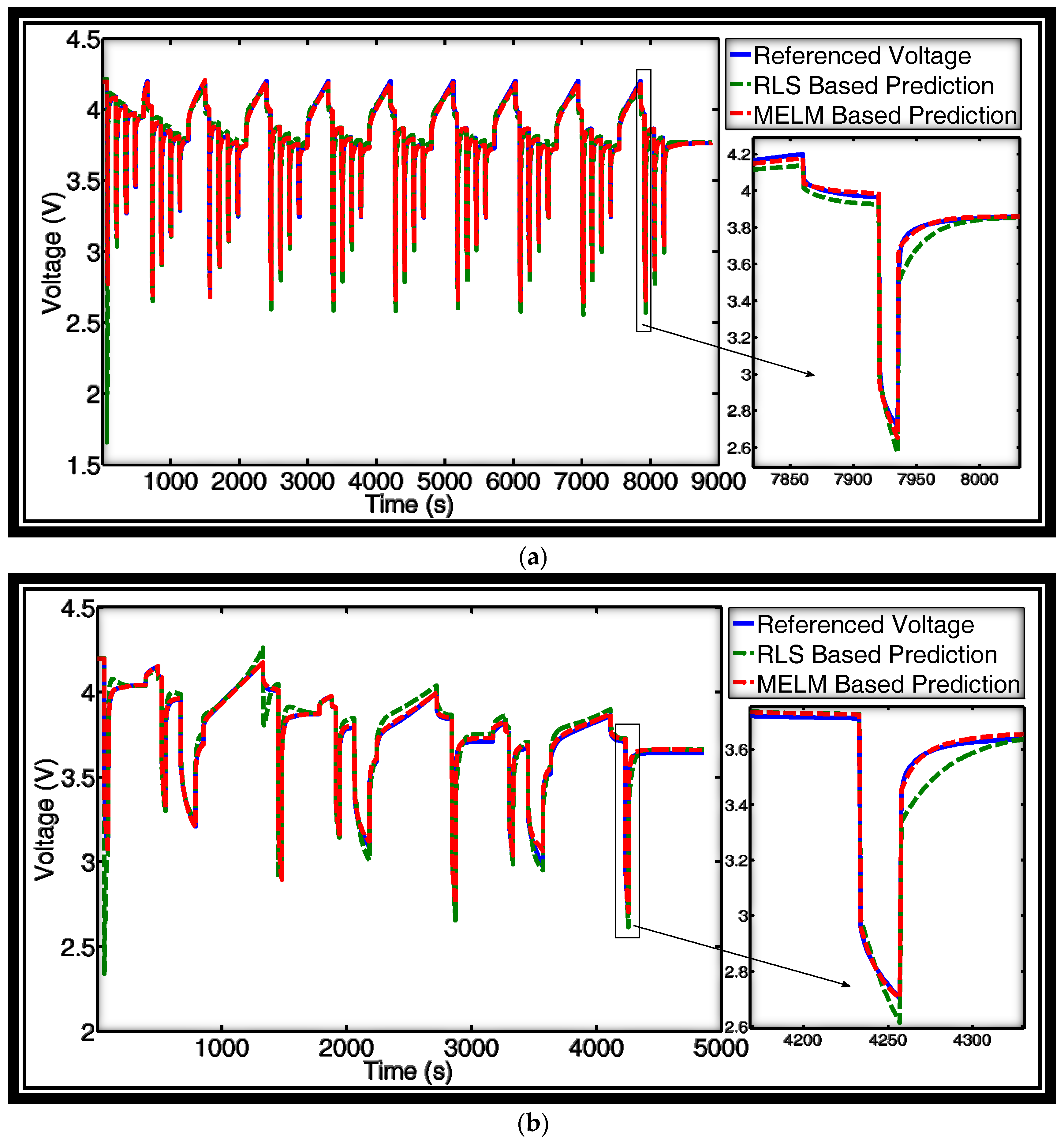
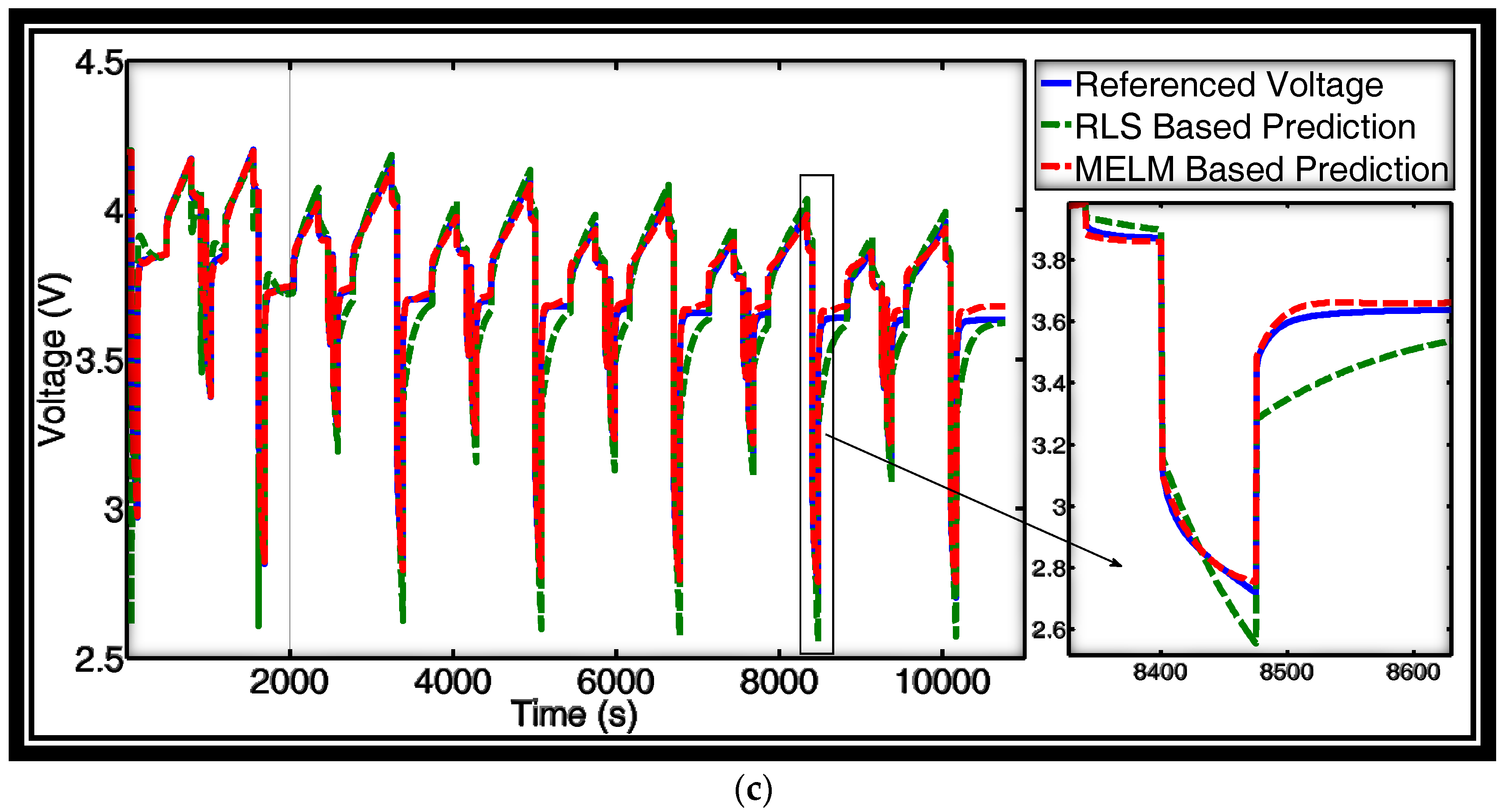
3.3.2. Voltage and Power Prediction
4. Conclusions
- The influence of both ambient temperature and temperature caused by Joule heat are considered.
- The influence of the SOC changing is considered for more accurate long-term prediction.
- The generalization performance of SLFN improves by using models to replace active functions.
- MELM provides an alternative way to identify systems with complex structures using only the least squares method, which can be calculated both offline and online.
- Power prediction accuracy does not rely on the accuracy of state estimation such as SOC.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lim, K.; Bastawrous, H.A.; Duong, V.-H.; See, K.W.; Zhang, P.; Dou, S.X. Fading Kalman filter-based real-time state of charge estimation in LiFePO 4 battery-powered electric vehicles. Appl. Energy 2016, 169, 40–48. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M.G. A double-scale, particle-filtering, energy state prediction algorithm for lithium-ion batteries. IEEE Trans. Ind. Electron. 2017, PP, 1. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement learning-based real-time power management for hybrid energy storage system in the plug-in hybrid electric vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Thackeray, M.M.; Wolverton, C.; Isaacs, E.D. Electrical energy storage for transportation—Approaching the limits of, and going beyond, lithium-ion batteries. Energy Environ. Sci. 2012, 5, 7854–7863. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Shen, W. A lithium-ion battery-in-the-loop approach to test and validate multi-scale dual H infinity filters for state of charge and capacity estimation. IEEE Trans. Power Electron. 2018, PP, 1. [Google Scholar]
- Tang, X.; Liu, B.; Lv, Z.; Gao, F. Observer based battery SOC estimation: Using multi-gain-switching approach. Appl. Energy 2017, 204, 1275–1283. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Mu, H.; Wang, C. A systematic model-based degradation behavior recognition and health monitoring method for lithium-ion batteries. Appl. Energy 2017, 207, 372–383. [Google Scholar] [CrossRef]
- Wik, T.; Fridholm, B.; Kuusisto, H. Implementation and robustness of an analytically based battery state of power. J. Power Sources 2015, 287, 448–457. [Google Scholar] [CrossRef]
- Rahman, M.; Anwar, S.; Izadian, A. Electrochemical Model-Based Condition Monitoring via Experimentally Identified Li-Ion Battery Model and HPPC. Energies 2017, 10, 1266. [Google Scholar] [CrossRef]
- Plett, G.L. High-performance battery-pack power estimation using a dynamic cell model. IEEE Trans. Veh. Technol. 2004, 53, 1586–1593. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, R.; Liu, C.; Chen, Z.; Ling, Q. Power capability evaluation for lithium iron phosphate batteries based on multi-parameter constraints estimation. J. Power Sources 2018, 374, 12–23. [Google Scholar] [CrossRef]
- Yu, Q.; Xiong, R.; Lin, C.; Shen, W.; Deng, J. Lithium-ion Battery Parameters and State-of-Charge Joint Estimation Based on H infinity and Unscented Kalman Filters. IEEE Trans. Veh. Technol. 2017, 66, 8693–8701. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.Y.; Li, X.; Chen, W.; Yin, G.G.; Jiang, J. Robust and Adaptive Estimation of State of Charge for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 4948–4957. [Google Scholar] [CrossRef]
- Liu, G.; Ouyang, M.; Lu, L.; Li, J.; Hua, J. A highly accurate predictive-adaptive method for lithium-ion battery remaining discharge energy prediction in electric vehicle applications. Appl. Energy 2015, 149, 297–314. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, S.; Ma, Z.; Wang, L.Y.; Wu, K. Butler-Volmer equation-based model and its implementation on state of power prediction of high-power lithium titanate batteries considering temperature effects. Energy 2016, 117, 58–72. [Google Scholar] [CrossRef]
- Hausmann, A.; Depcik, C. Expanding the Peukert equation for battery capacity modeling through inclusion of a temperature dependency. J. Power Sources 2013, 235, 148–158. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H. Estimation of state-of-charge and state-of-power capability of lithium-ion battery considering varying health conditions. J. Power Sources 2014, 259, 166–176. [Google Scholar] [CrossRef]
- Xu, Z.; Gao, S.; Yang, S. LiFePO4 battery state of charge estimation based on the improved Thevenin equivalent circuit model and Kalman filtering. J. Renew. Sustain. Energy 2016, 8, 376–378. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Zhang, C. On-line remaining energy prediction: A case study in embedded battery management system. Appl. Energy 2016, 194, 688–695. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J.; Zhang, C.; Wang, P. An online model-based method for state of energy estimation of lithium-ion batteries using dual filters. J. Power Sources 2016, 301, 277–286. [Google Scholar] [CrossRef]
- Wang, S.; Verbrugge, M.; Wang, J.S.; Liu, P. Power prediction from a battery state estimator that incorporates diffusion resistance. J. Power Sources 2012, 214, 399–406. [Google Scholar] [CrossRef]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Z.; Zhang, C.; Wu, J. A novel temperature-compensated model for power Li-ion batteries with dual-particle-filter state of charge estimation. Appl. Energy 2014, 123, 263–272. [Google Scholar] [CrossRef]
- Wang, T.; Tseng, K.J.; Zhao, J.; Wei, Z. Thermal investigation of lithium-ion battery module with different cell arrangement structures and forced air-cooling strategies. Appl. Energy 2014, 134, 229–238. [Google Scholar] [CrossRef]
- Murashko, K.; Pyrhönen, J.; Laurila, L. Three-dimensional thermal model of a lithium ion battery for hybrid mobile working machines: Determination of the model parameters in a pouch cell. IEEE Trans. Energy Convers. 2013, 28, 335–343. [Google Scholar] [CrossRef]
- Tang, X.; Liu, B.; Gao, F. State of Charge Estimation of LiFePO4 Battery Based on a Gain-classifier Observer. Energy Procedia 2017, 105, 2071–2076. [Google Scholar] [CrossRef]
- Tang, X.; Liu, B.; Gao, F.; Lv, Z. State-of-Charge Estimation for Li-Ion Power Batteries Based on a Tuning Free Observer. Energies 2016, 9, 675. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.Y.; Lin, C. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
- Tang, X.; Wang, Y.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries based on a dual-circuit state observer. J. Power Sources 2015, 296, 23–29. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2017. [Google Scholar] [CrossRef]
- Huang, G.-B.; Chen, L. Enhanced random search based incremental extreme learning machine. Neurocomputing 2008, 71, 3460–3468. [Google Scholar] [CrossRef]
- Huang, G.-B.; Wang, D.H.; Lan, Y. Extreme learning machines: A survey. Int. J. Mach. Learn. Cybern. 2011, 2, 107–122. [Google Scholar] [CrossRef]
- Rumerhart, D.; Hinton, G.; Williams, R. Learning representations by back-propagation errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Xu, L.; Wang, J.; Chen, Q. Kalman filtering state of charge estimation for battery management system based on a stochastic fuzzy neural network battery model. Energy Convers. Manag. 2012, 53, 33–39. [Google Scholar] [CrossRef]
- Zou, C.; Manzie, C.; Nesic, D.; Kallapur, A.G. Multi-time-scale observer design for state-of-charge and state-of-health of a lithium-ion battery. J. Power Sources 2016, 335, 121–130. [Google Scholar] [CrossRef]
- Zou, C.; Manzie, C.; Nešić, D. A Framework for Simplification of PDE-Based Lithium-Ion Battery Models. IEEE Trans. Control Syst. Technol. 2016, 24, 1594–1609. [Google Scholar] [CrossRef]
- Chen, Z.; Xiong, R.; Cao, J.; Lund, H.; Kaiser, M.J. Particle swarm optimization-based optimal power management of plug-in hybrid electric vehicles considering uncertain driving conditions. Energy 2016, 96, 197–208. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; He, H.; Nguyen, T.D. A data-driven adaptive state of charge and power capability joint estimator of lithium-ion polymer battery used in electric vehicles. Energy 2013, 63, 295–308. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Name | Details |
|---|---|---|
| 1 | Initialization | P = 105I, λ = 0.995, W = |
| 2 | Gain Calculation | K = P·hT/(λ + h·P·hT) |
| 3 | P Calculation | P = (I − K·h)·P/λ |
| 4 | W Calculation | W = W + K·(Y − h·W) |
| 5 | Loop | Loop to Step 2 |
| Stages | Methods |
|---|---|
| Offline | 1. Randomly generate N temperature models; |
| 2. Randomly generate N equivalent circuit models; | |
| Online Training | 1. Use RLS to obtain weight matrix W1 for temperature models; |
| 2. Use RLS to obtain weight matrix W2 for equivalent circuit models; | |
| Future Prediction | 1. Design the current profile that should be predicted (e.g., a 10 s pulse, or some long lasting current profiles) |
| 2. Calculate the future temperature based on the future current load profile and W1 | |
| 3. Calculate the future terminal voltage based on the future current load profile, calculated temperature and W2. | |
| 4. Check whether the voltage and the temperature exceed the limits. |
| Battery Type: | Battery Capacity | Device Model |
|---|---|---|
| SONY US18650VTC4 | 2.10 Ah (Manufacturer Data) | Electronic Load: Sunway CT4008 W |
| 1.90 Ah (Experimental Data, 25 °C) | Thermal Chamber: Bole GDS150 |
| Parameter | Suggested Value | Range |
|---|---|---|
| α | 0.99916 | (0.995, 0.9999) |
| β | 0.000067 | (0.00005, 0.001) |
| γ | 1 | (0.3, 3) |
| delay | 50 (s) | [0,100], integer |
| Parameter | Suggested Value at 25 °C * | Range | Suggested ci Value | Range |
|---|---|---|---|---|
| Cn | 1.90 Ah | (1.5, 2.15) Ah | 8.79 mAh/°C | (3, 18) mAh/°C |
| R0 | 0.0240 Ω | (0.005, 0.08) Ω | −0.97 mΩ/°C | (−2, −0.2) mΩ/°C |
| Rp | 0.0362 Ω | (0.005, 0.08) Ω | 0 mΩ/°C ** | (−1, 1) mΩ/°C |
| Cp | 2445 F | (500, 10,000) F | 5 F/°C | (−0.5, 12) F/°C |
| HY | 0 mV | (−10, 10) mV | 0 mV/°C | (−1, 1) mV/°C |
| Initial SOC | Vref = look up table value | Vref ± 10% | - | - |
| Initial Up | 0 mV | - | - | - |
| Temperature (°C) | RLS Error (W) | MELM Error (W) |
|---|---|---|
| 05 | 0.372 | 0.172 |
| 25 | 0.376 | 0.217 |
| 45 | 0.552 | 0.139 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Yao, K.; Liu, B.; Hu, W.; Gao, F. Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine. Energies 2018, 11, 86. https://doi.org/10.3390/en11010086
Tang X, Yao K, Liu B, Hu W, Gao F. Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine. Energies. 2018; 11(1):86. https://doi.org/10.3390/en11010086
Chicago/Turabian StyleTang, Xiaopeng, Ke Yao, Boyang Liu, Wengui Hu, and Furong Gao. 2018. "Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine" Energies 11, no. 1: 86. https://doi.org/10.3390/en11010086
APA StyleTang, X., Yao, K., Liu, B., Hu, W., & Gao, F. (2018). Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine. Energies, 11(1), 86. https://doi.org/10.3390/en11010086