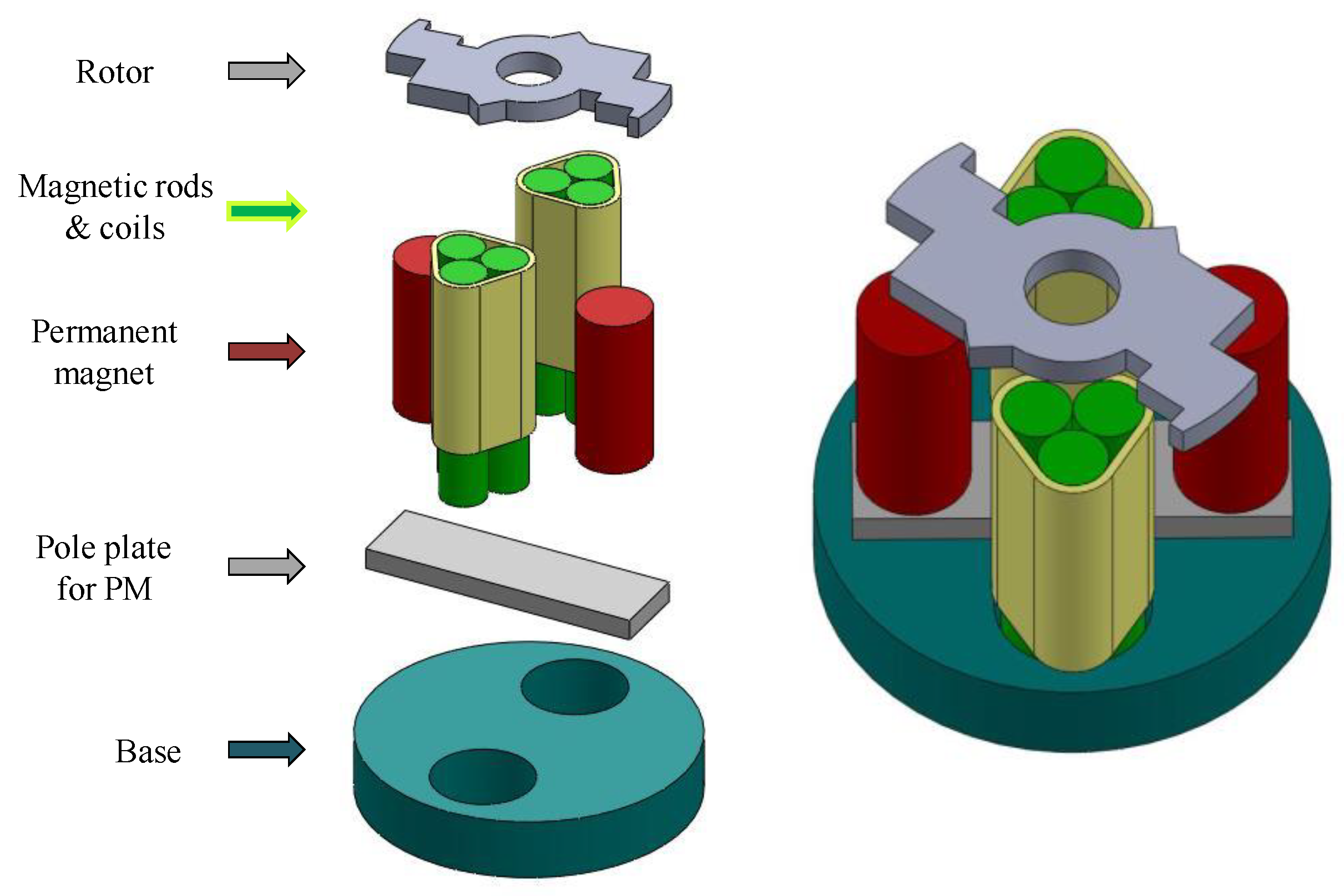
Figure 1.
Exploded view and assembly drawings of the micro, axial-flux, single-phase switched reluctance motor.
Figure 1.
Exploded view and assembly drawings of the micro, axial-flux, single-phase switched reluctance motor.
Figure 2.
Coordinate and rotating angle of the single-phase switched reluctance motor.
Figure 2.
Coordinate and rotating angle of the single-phase switched reluctance motor.
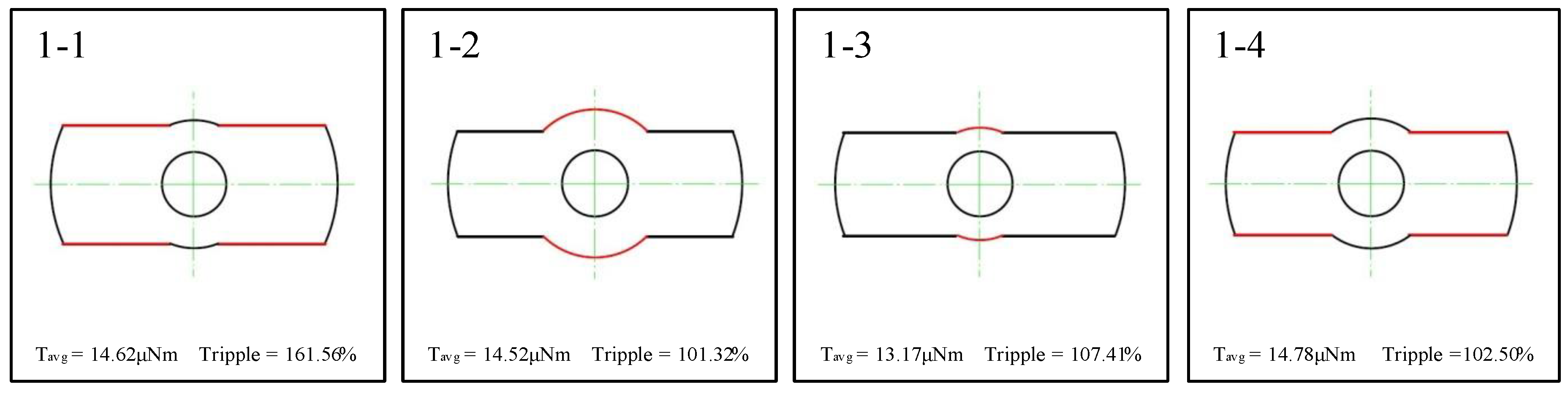
Figure 3.
Step 1: Design process of the rotor magnetic pole width and root diameter.
Figure 3.
Step 1: Design process of the rotor magnetic pole width and root diameter.
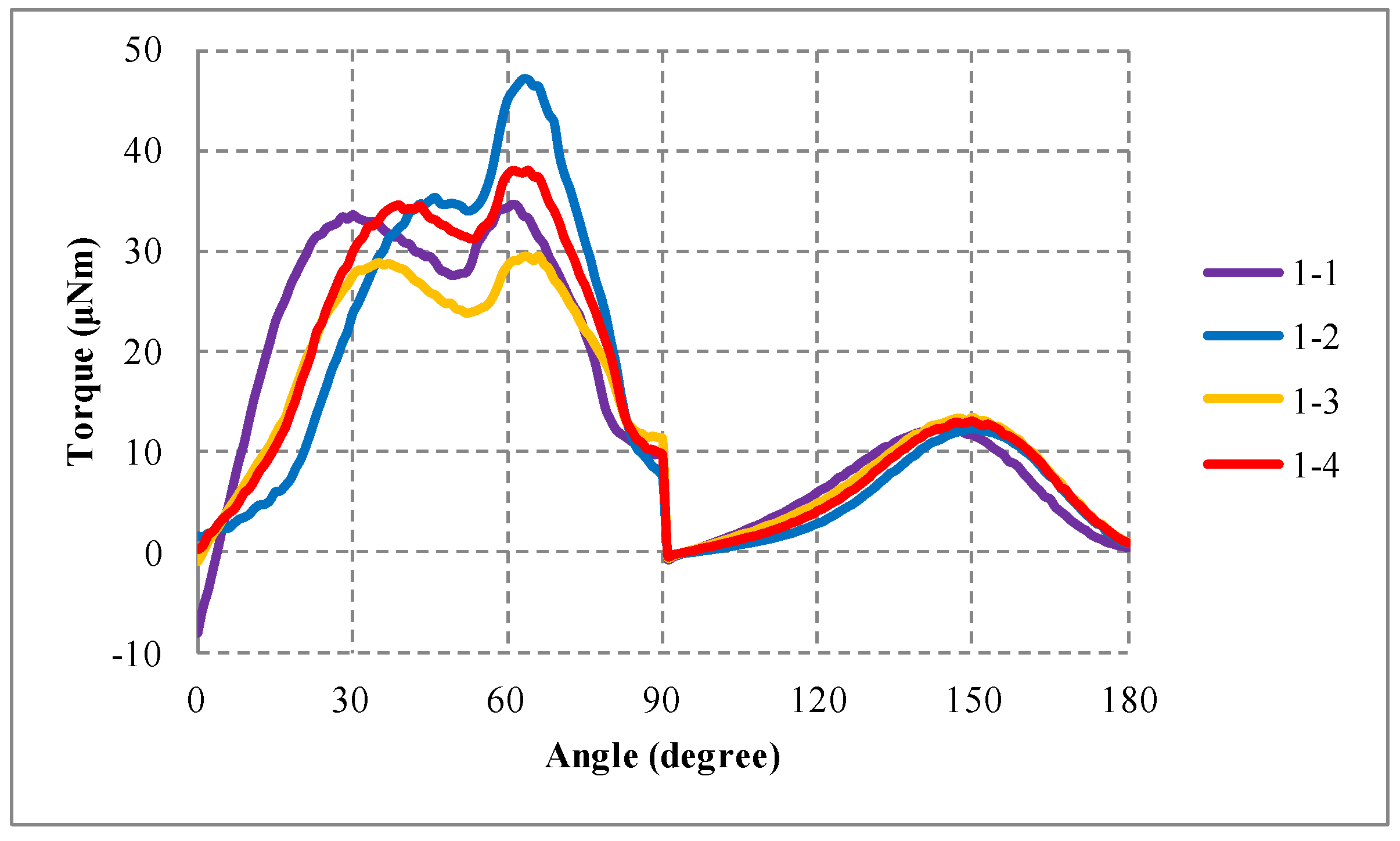
Figure 4.
Step 1: Torque-angle curve for each step.
Figure 4.
Step 1: Torque-angle curve for each step.
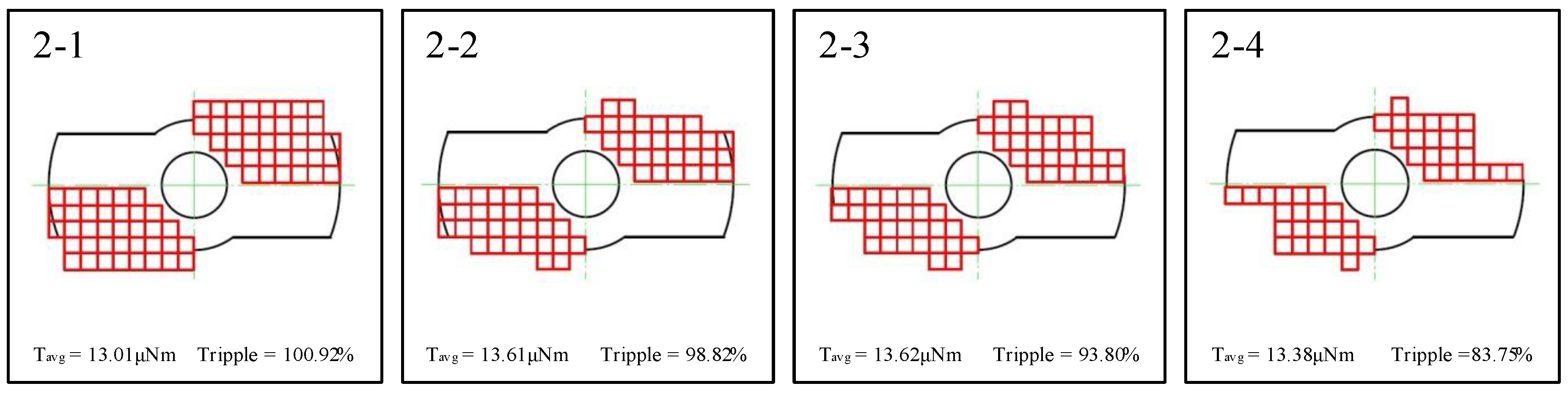
Figure 5.
Step 2: Design process of the rotor magnetic pole of quadrants 1 and 3.
Figure 5.
Step 2: Design process of the rotor magnetic pole of quadrants 1 and 3.
Figure 6.
Step 2: Torque-angle curve for each step.
Figure 6.
Step 2: Torque-angle curve for each step.
Figure 7.
Step 3: Design process of the rotor magnetic poles for quadrant 2 and 4.
Figure 7.
Step 3: Design process of the rotor magnetic poles for quadrant 2 and 4.
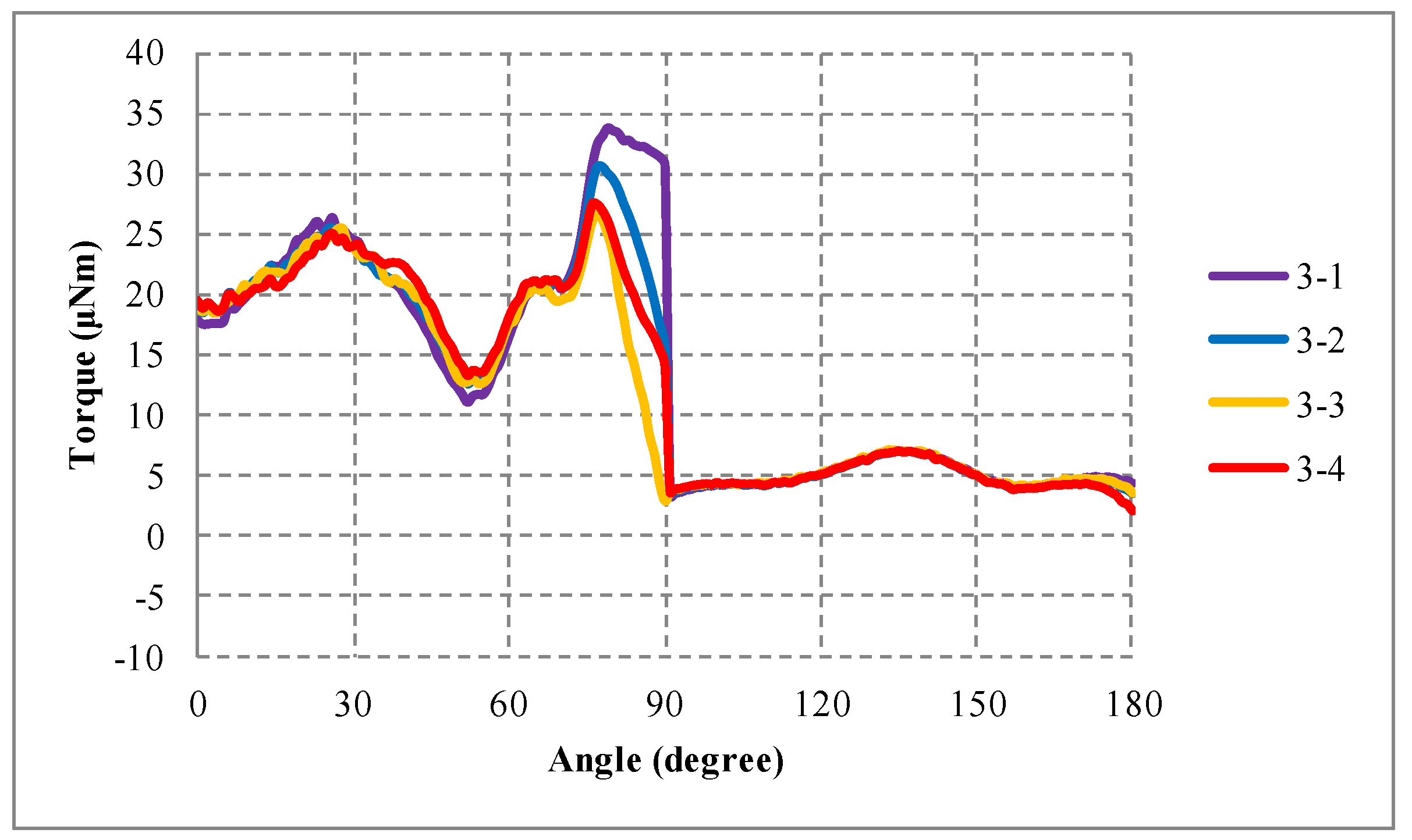
Figure 8.
Step 3: Torque-angle curve for each step.
Figure 8.
Step 3: Torque-angle curve for each step.
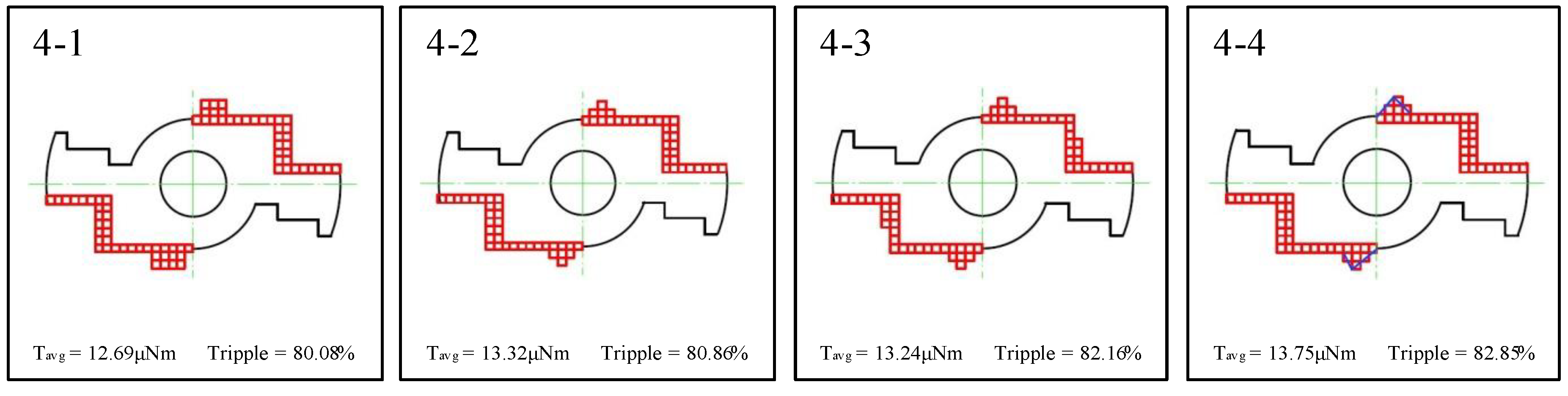
Figure 9.
Step 4: Detailed design process of the rotor magnetic pole.
Figure 9.
Step 4: Detailed design process of the rotor magnetic pole.
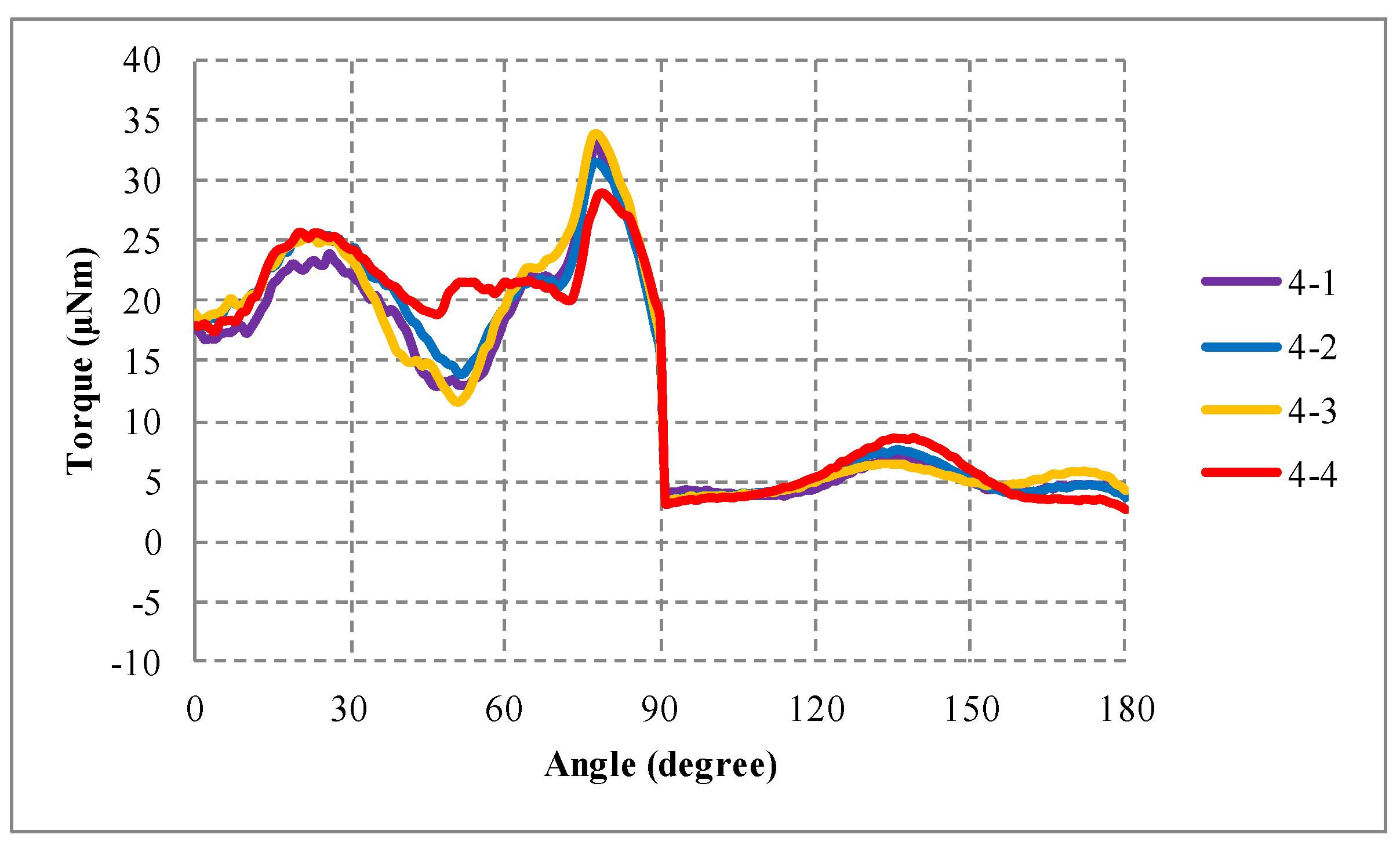
Figure 10.
Step 4: Torque-angle curve for each step.
Figure 10.
Step 4: Torque-angle curve for each step.
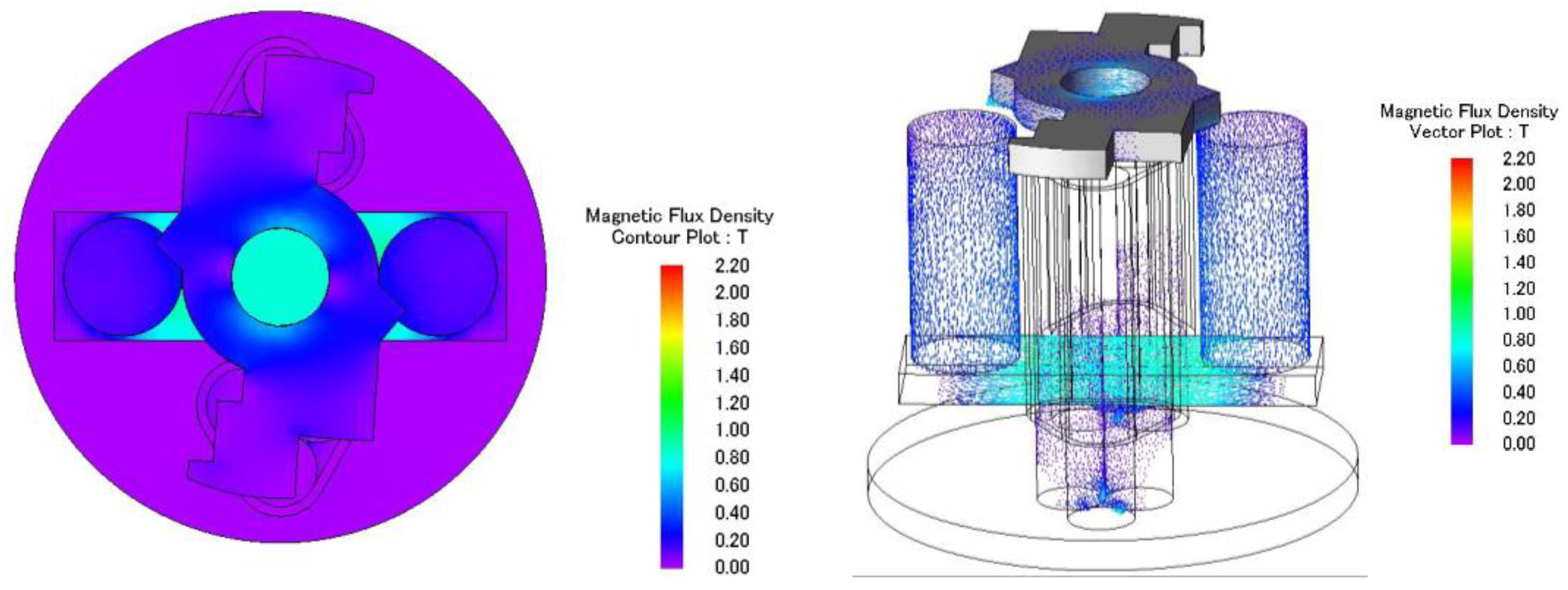
Figure 11.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 0°.
Figure 11.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 0°.
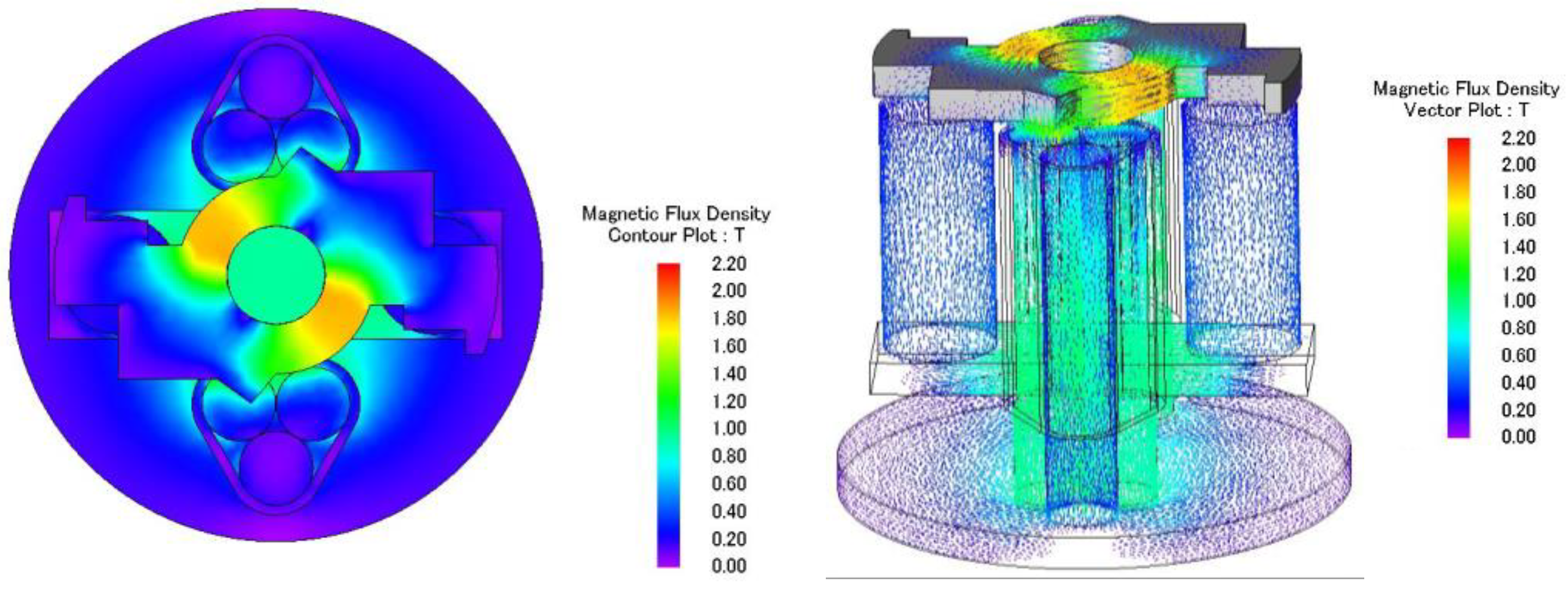
Figure 12.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 74°.
Figure 12.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 74°.
Figure 13.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 91°.
Figure 13.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 91°.
Figure 14.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 135°.
Figure 14.
Top view and 3D view of magnetic flux density plots of the motor at a rotating angle of 135°.
Figure 15.
Mechanical parts of the axial-flux, single-phase switched reluctance motor.
Figure 15.
Mechanical parts of the axial-flux, single-phase switched reluctance motor.
Figure 16.
Prototype of the axial-flux, single-phase switched reluctance motor.
Figure 16.
Prototype of the axial-flux, single-phase switched reluctance motor.
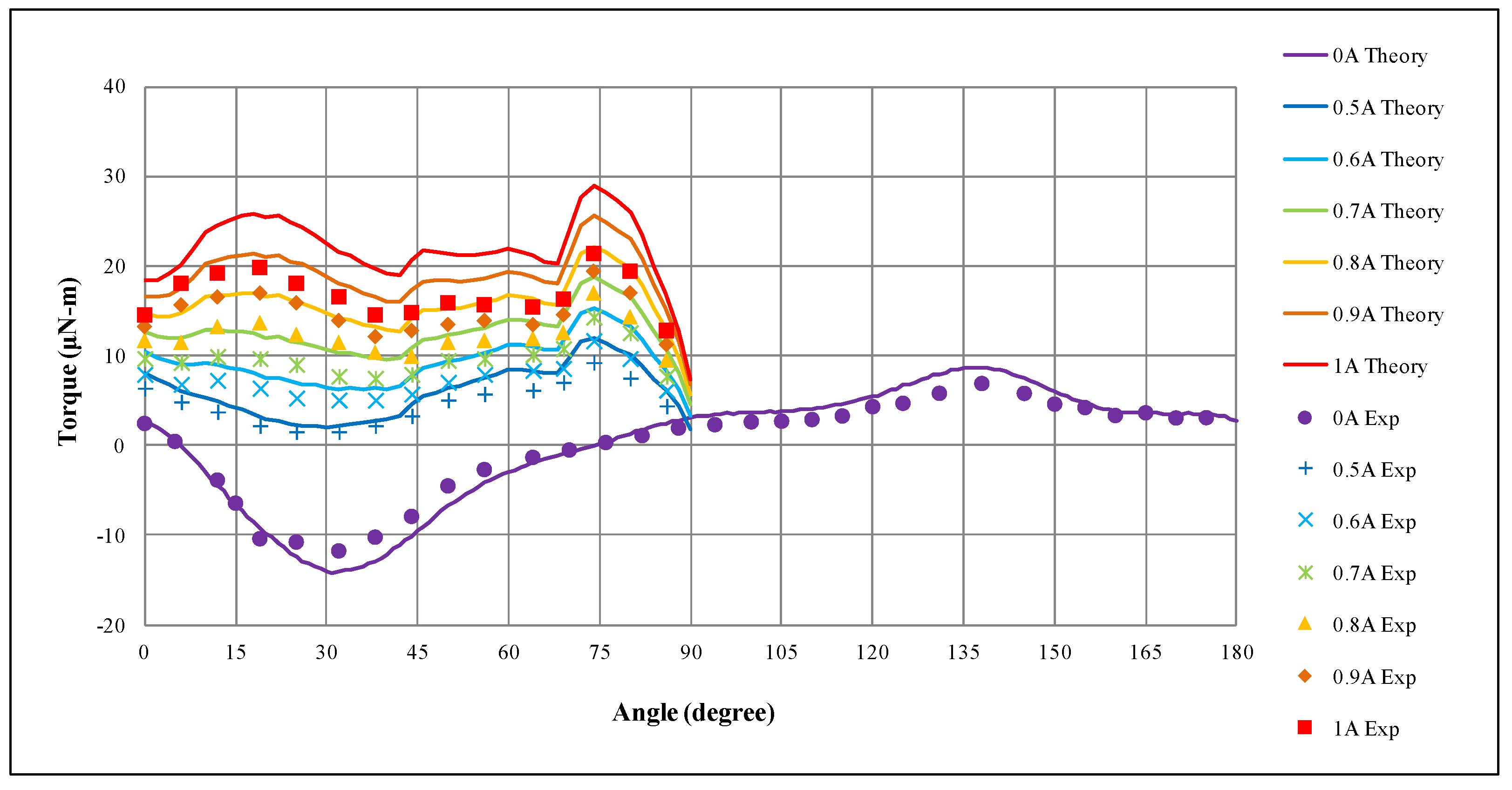
Figure 17.
Theoretical and experimental torque-angle curves of the single-phase switched reluctance motor.
Figure 17.
Theoretical and experimental torque-angle curves of the single-phase switched reluctance motor.
Figure 18.
Theoretical and experimental torque-angle curves of the motor with friction correction.
Figure 18.
Theoretical and experimental torque-angle curves of the motor with friction correction.
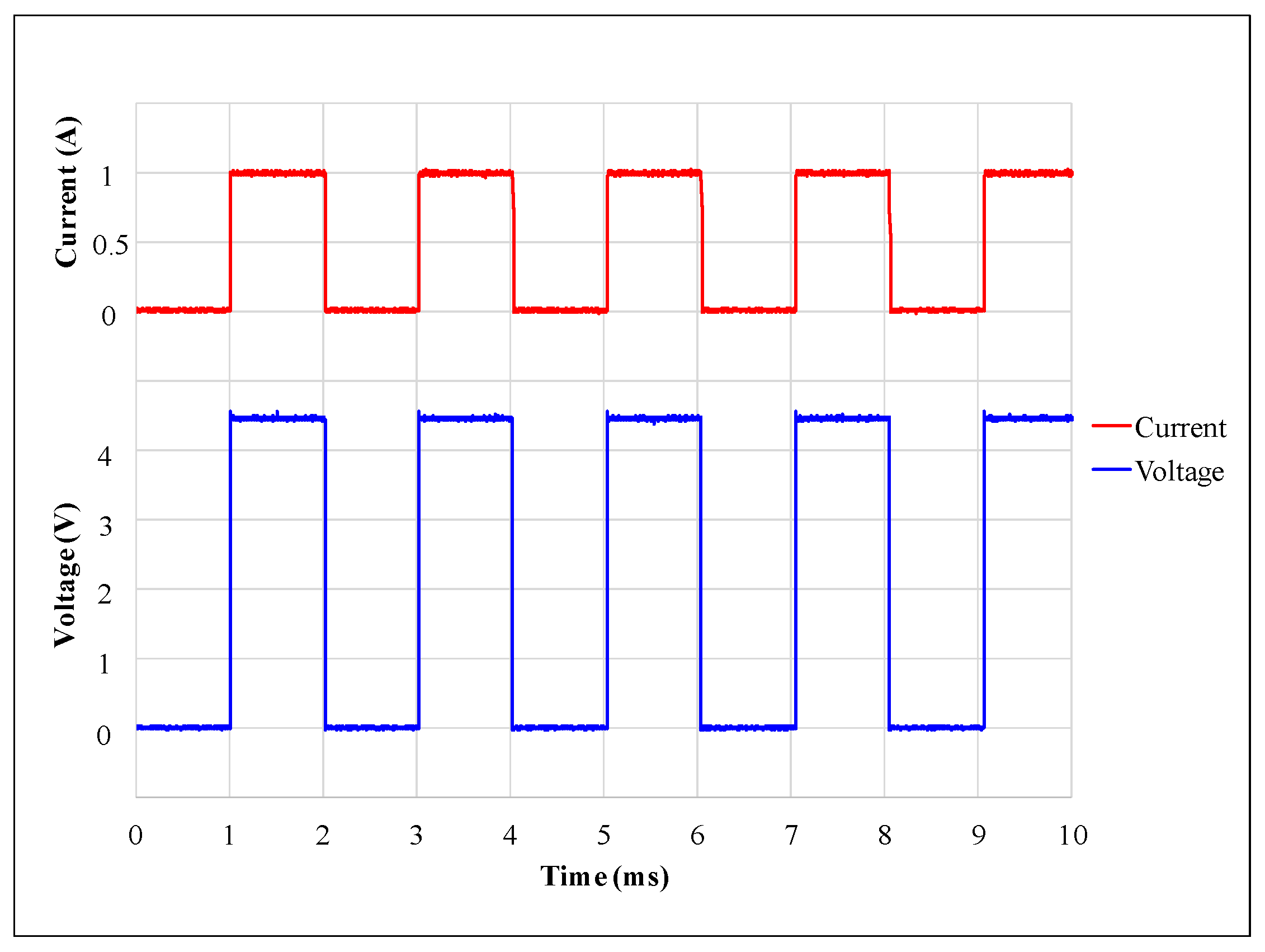
Figure 19.
Voltage and current signals of the single-phase switched reluctance motor at a maximum speed of 1500 rpm.
Figure 19.
Voltage and current signals of the single-phase switched reluctance motor at a maximum speed of 1500 rpm.
Figure 20.
Schematic diagram of the wireless-driven, single-phase switched reluctance motor system.
Figure 20.
Schematic diagram of the wireless-driven, single-phase switched reluctance motor system.
Figure 21.
Photograph of the actual wireless-driven, single-phase switched reluctance motor test system.
Figure 21.
Photograph of the actual wireless-driven, single-phase switched reluctance motor test system.
Figure 22.
Current-distance curves of the single-phase switched reluctance motor and pure resistance loads.
Figure 22.
Current-distance curves of the single-phase switched reluctance motor and pure resistance loads.
Figure 23.
Current-frequency curves of the wireless charging module with pure resistance loads at a 2 mm distance.
Figure 23.
Current-frequency curves of the wireless charging module with pure resistance loads at a 2 mm distance.
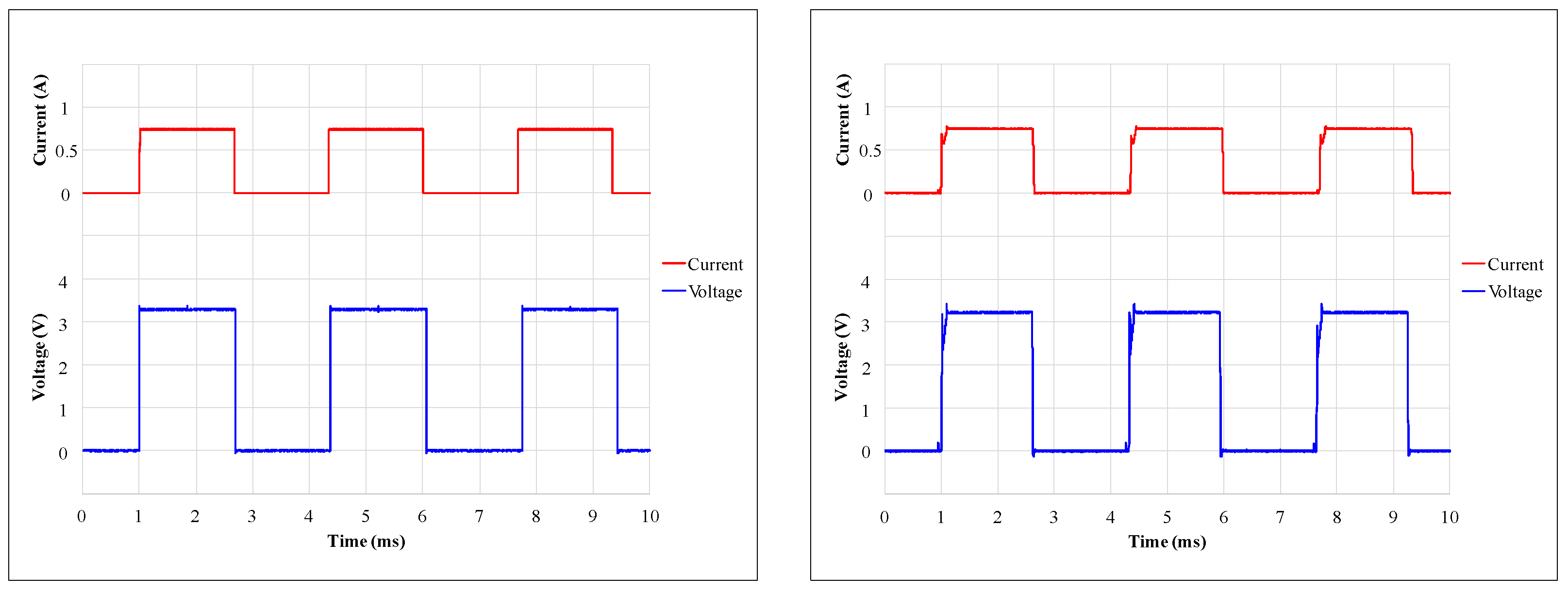
Figure 24.
Voltage and current signals of the motor at 900 rpm with wire-driven (left) and wireless-driven (right) conditions.
Figure 24.
Voltage and current signals of the motor at 900 rpm with wire-driven (left) and wireless-driven (right) conditions.
Table 1.
Specifications of the micro, axial-flux, single-phase switched reluctance motor.
Table 1.
Specifications of the micro, axial-flux, single-phase switched reluctance motor.
| Mechanical Specifications |
|---|
| Stator | Poles | 2 | Rotor | Poles | 2 |
| Number of permanent magnets | 2 | External diameter | 4.5 mm |
| External diameter | 5.5 mm | Root diameter | 2 mm |
| Diameter of magnetic rods | 0.75 mm × 3 | Internal diameter | 1 mm |
| Diameter of permanent magnets | 1.2 mm | Length | 0.35 mm |
| Length of magnetic rods | 4 mm | Air gap between rotor and stator pole | 0.06 mm |
| Length of permanent magnets | 2.65 mm | Air gap between rotor and permanent magnet | 0.2 mm |
| Electrical Specifications |
| Phase | 1 | Step angle | 90° |
| Number of turns of coil | 120 | Diameter of coil | 0.07 mm |
| Maximum current | 1 A | Resistance of coil | 3.4 Ω |
Table 2.
Step 1: Comparison of the torque characteristics of each step.
Table 2.
Step 1: Comparison of the torque characteristics of each step.
| Step | 1-1 | 1-2 | 1-3 | 1-4 |
|---|
| Maximum torque (μN·m) | 34.52 | 47.07 | 29.37 | 38.11 |
| Minimum torque (μN·m) | −8.12 | −0.31 | −1.05 | −0.47 |
| Average torque (μN·m) | 14.62 | 14.52 | 13.17 | 14.78 |
| Relative ripple torque (%) | 161.56 | 101.32 | 107.41 | 102.50 |
Table 3.
Step 2: Comparison table of the torque characteristic of each step.
Table 3.
Step 2: Comparison table of the torque characteristic of each step.
| Step | 2-1 | 2-2 | 2-3 | 2-4 |
|---|
| Maximum torque (μN·m) | 28.07 | 29.50 | 28.14 | 34.21 |
| Minimum torque (μN·m) | −0.13 | 0.18 | 0.90 | 3.03 |
| Average torque (μN·m) | 13.01 | 13.61 | 13.62 | 13.38 |
| Relative ripple torque (%) | 100.92 | 98.82 | 93.80 | 83.75 |
Table 4.
Step 3: Comparison of the torque characteristics of each step.
Table 4.
Step 3: Comparison of the torque characteristics of each step.
| Step | 3-1 | 3-2 | 3-3 | 3-4 |
|---|
| Maximum torque (μN·m) | 33.87 | 30.68 | 26.77 | 27.40 |
| Minimum torque (μN·m) | 3.26 | 3.58 | 2.83 | 2.16 |
| Average torque (μN·m) | 13.52 | 13.10 | 12.20 | 12.73 |
| Relative ripple torque (%) | 82.44 | 79.09 | 80.87 | 85.37 |
Table 5.
Step 4: Comparison of the torque characteristics of each step.
Table 5.
Step 4: Comparison of the torque characteristics of each step.
| Step | 4-1 | 4-2 | 4-3 | 4-4 |
|---|
| Maximum torque (μN·m) | 33.26 | 31.53 | 33.90 | 29.04 |
| Minimum torque (μN·m) | 3.68 | 3.34 | 3.32 | 2.72 |
| Average torque (μN·m) | 12.67 | 13.32 | 13.24 | 13.75 |
| Relative ripple torque (%) | 80.08 | 80.86 | 82.16 | 82.85 |
Table 6.
Comparisons of theoretical and experimental torque characteristics of the single-phase switched reluctance motor.
Table 6.
Comparisons of theoretical and experimental torque characteristics of the single-phase switched reluctance motor.
| Current (A) | Max. Torque (μN·m) | Min. Torque (μN·m) | Average Torque (μN·m) | Relative Ripple Torque (%) |
|---|
| Theory | Experiment | Theory | Experiment | Theory | Experiment | Theory | Experiment |
|---|
| 0.5 | 12.03 | 9.26 | 1.98 | 1.54 | 5.65 | 4.29 | 71.77 | 71.43 |
| 0.6 | 15.37 | 11.69 | 2.72 | 1.92 | 7.33 | 5.56 | 69.89 | 67.23 |
| 0.7 | 18.75 | 14.33 | 2.72 | 1.92 | 8.99 | 6.77 | 74.64 | 72.45 |
| 0.8 | 22.20 | 16.98 | 2.72 | 1.92 | 10.62 | 8.01 | 78.15 | 76.23 |
| 0.9 | 25.61 | 19.40 | 2.72 | 1.92 | 12.21 | 9.26 | 80.78 | 78.89 |
| 1 | 29.04 | 21.39 | 2.72 | 1.92 | 13.75 | 10.34 | 82.85 | 80.66 |
Table 7.
Torque characteristics of the single-phase switched reluctance motor with and without friction correction.
Table 7.
Torque characteristics of the single-phase switched reluctance motor with and without friction correction.
| Current (A) | Maximum Torque (μN·m) | Average Torque (μN·m) |
|---|
| Theory | Experiment without Correction | Experiment with Correction | Theory | Experiment without Correction | Experiment with Correction |
|---|
| 0.5 | 12.03 | 9.26 | 10.45 | 5.65 | 4.29 | 5.48 |
| 0.6 | 15.37 | 11.69 | 12.88 | 7.33 | 5.56 | 6.75 |
| 0.7 | 18.75 | 14.33 | 15.52 | 8.99 | 6.77 | 7.96 |
| 0.8 | 22.20 | 16.98 | 18.17 | 10.62 | 8.01 | 9.20 |
| 0.9 | 25.61 | 19.40 | 20.59 | 12.21 | 9.26 | 10.45 |
| 1 | 29.04 | 21.39 | 21.58 | 13.75 | 10.34 | 11.53 |
Table 8.
Time response comparisons of the wire- and wireless-driven, single-phase switched reluctance motors.
Table 8.
Time response comparisons of the wire- and wireless-driven, single-phase switched reluctance motors.
| Speed (rpm) | Driven Method | Stable Time (ms) | Rise Time (ms) | Lag Time (ms) |
|---|
| 900 | Wire-driven | 0.10 | 0.08 | 0.05 |
| Wireless-driven | 1.26 | 0.86 | 0.54 |


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}