Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations

 ,
,  ,
, 
 and
and 
Abstract
:1. Introduction
- Our proposed control schemes are based on: (a) Fuzzy PI, (b) Fuzzy based on Levenberg Marquardt (LM) and Steepest Descent techniques, (c) Sliding Mode (SM), and (d) HC based on fuzzy PI and sliding mode principles for an IFOC IM drive.
- Superior Space Vector Pulse Width Modulation (SVPWM) technique-based inverter is designed. The dominant features of the SVPWM are: (a) low switching losses, (b) lower ripples, (c) simple digital implementation, (d) constant switching frequency, and (f) maximum DC-bus voltage utilization.
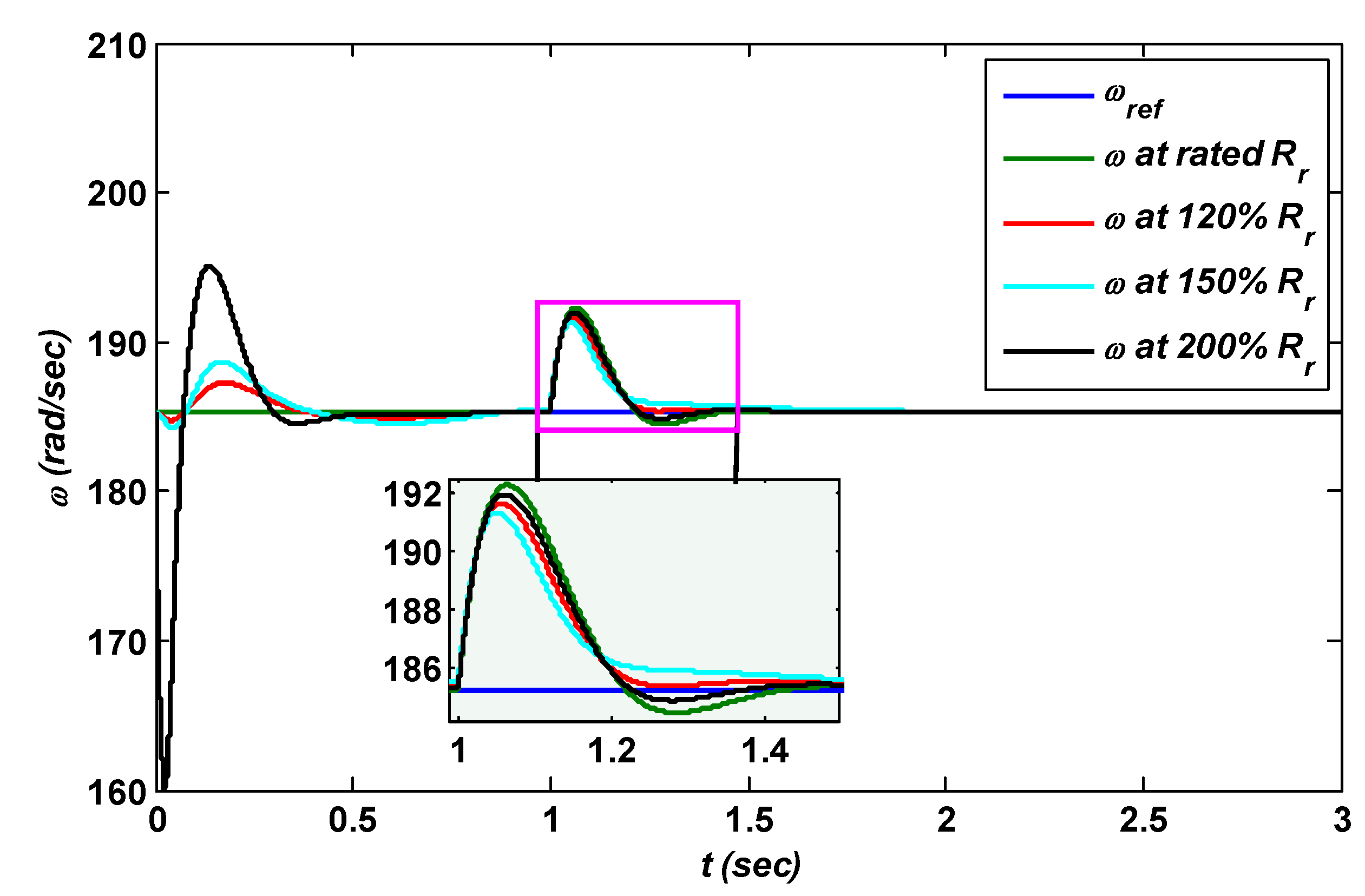
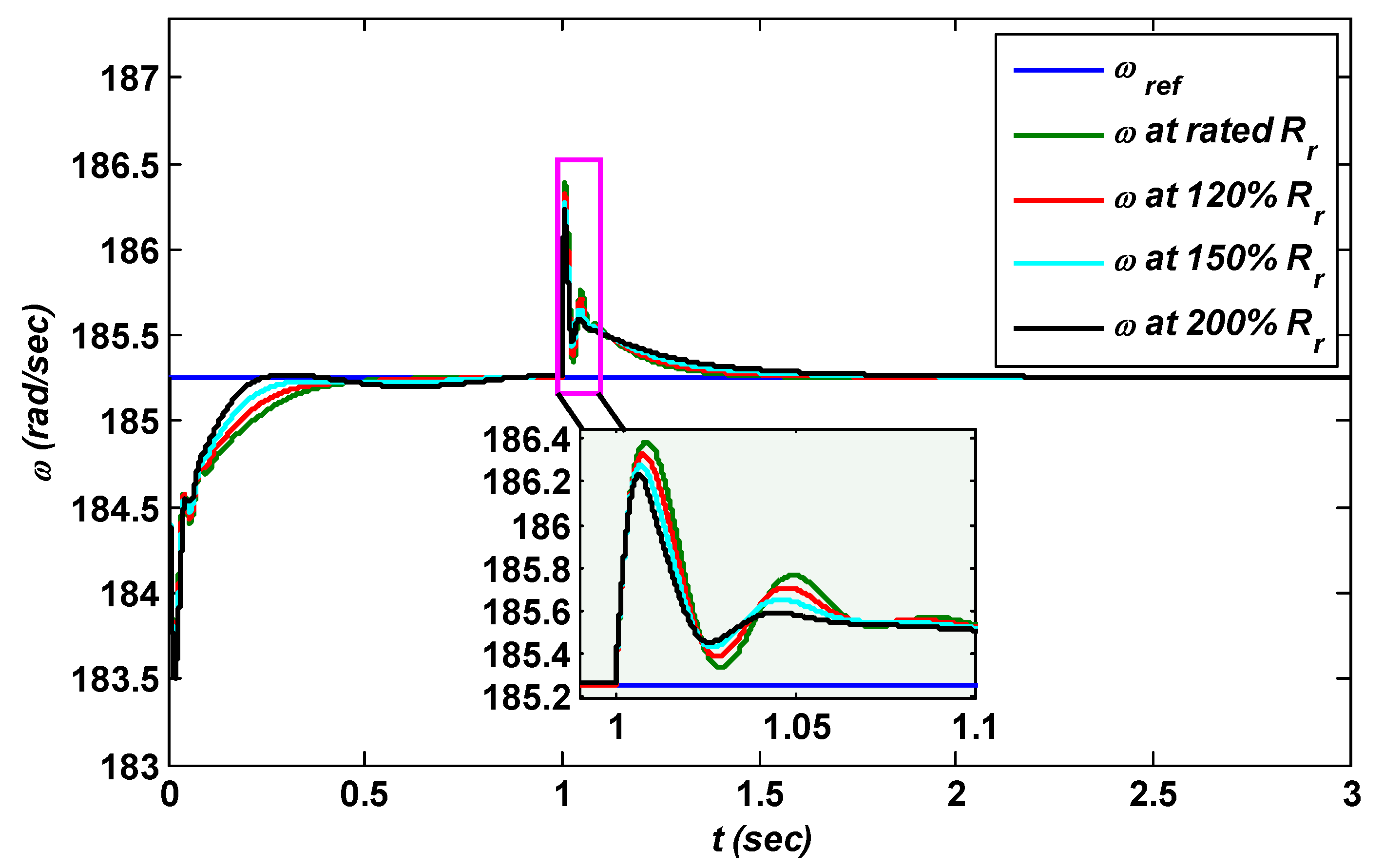
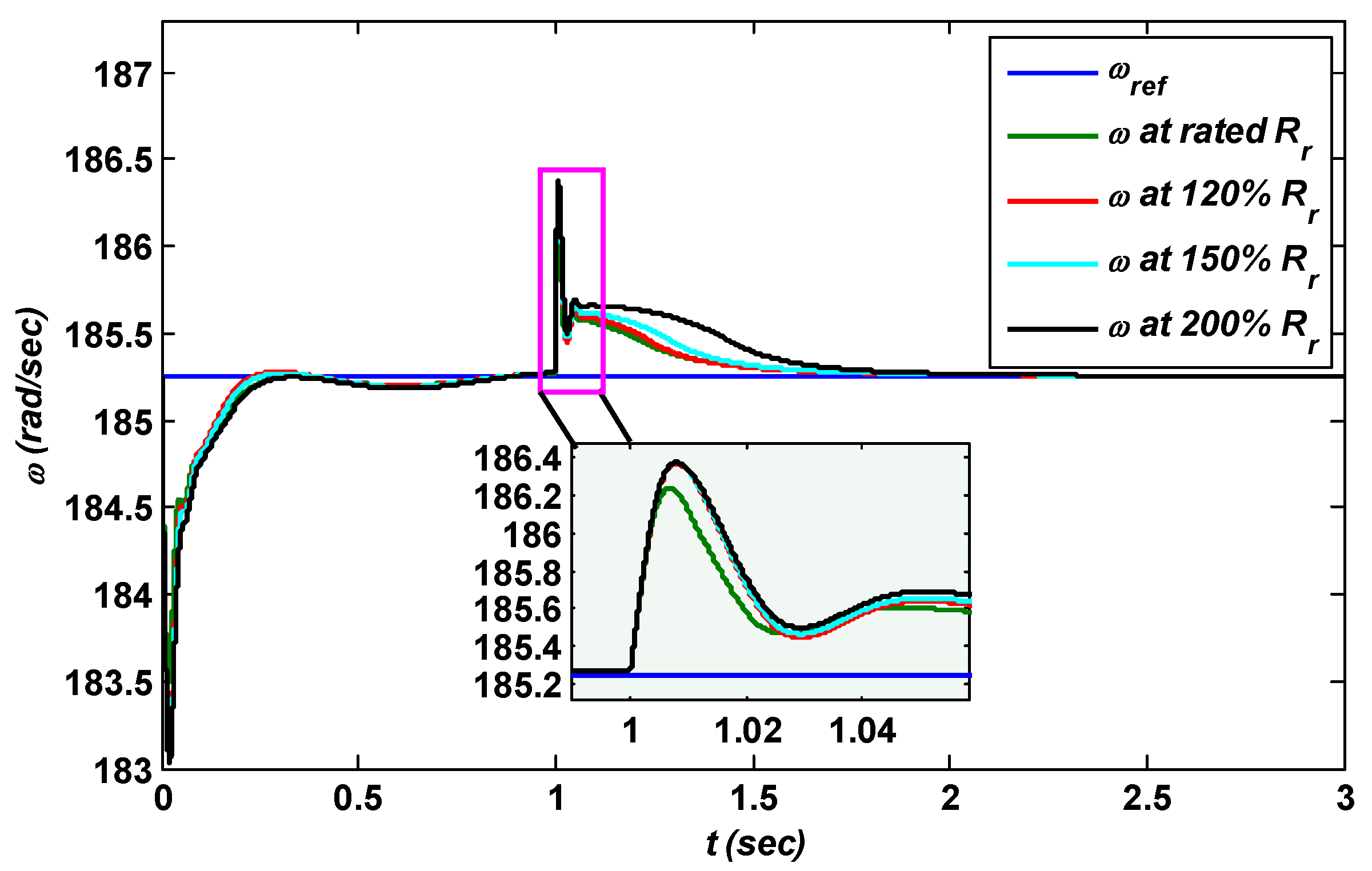
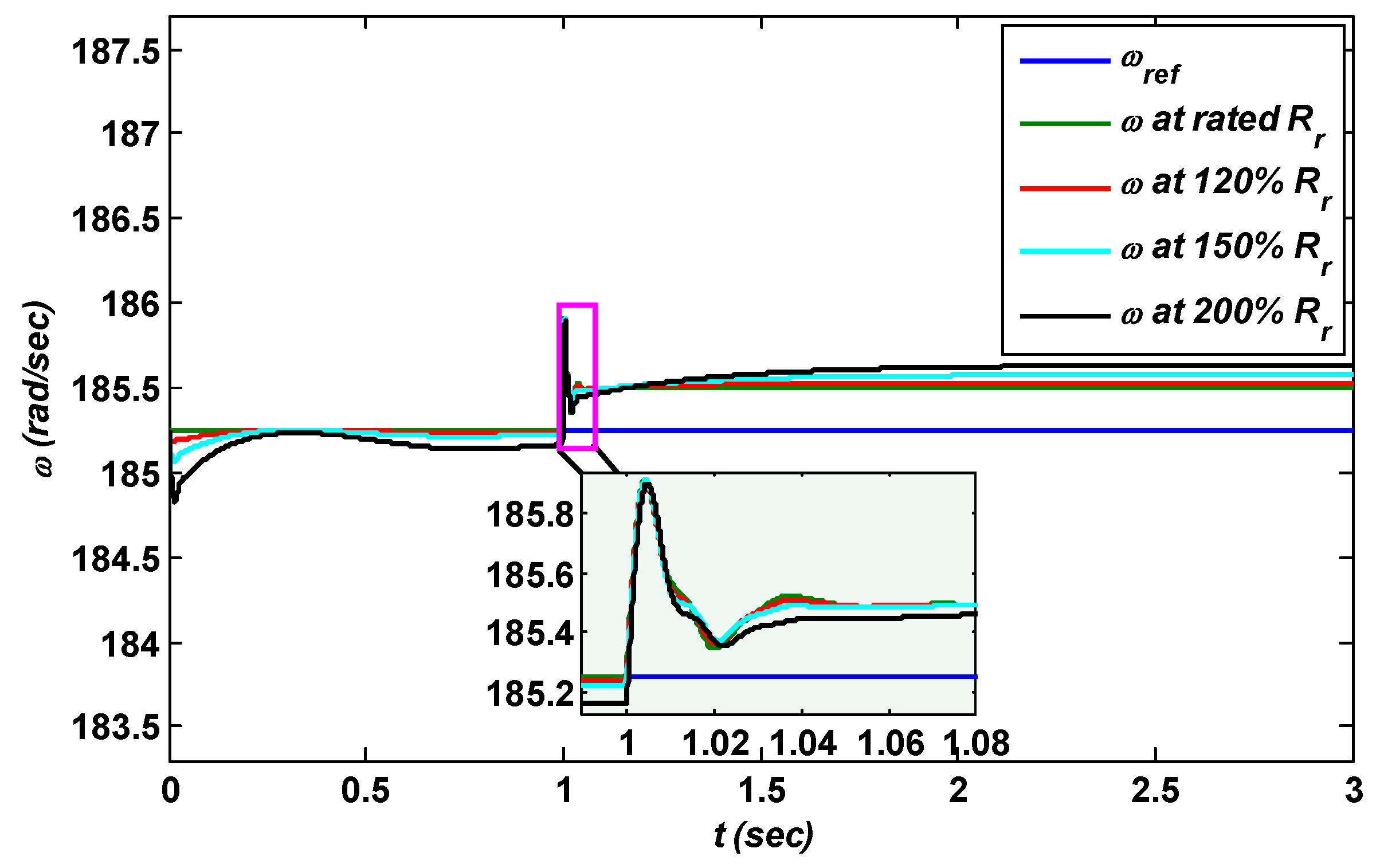
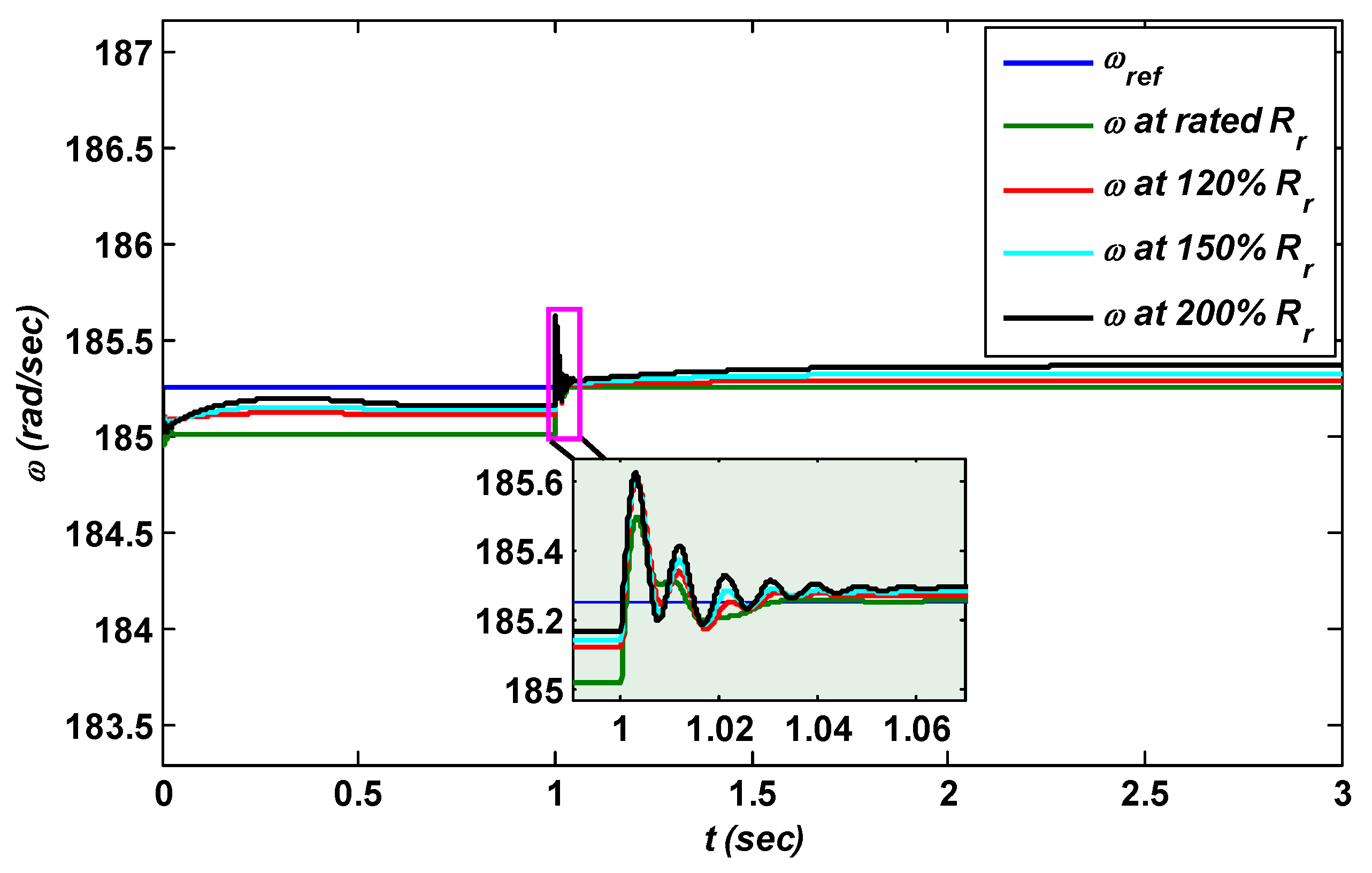
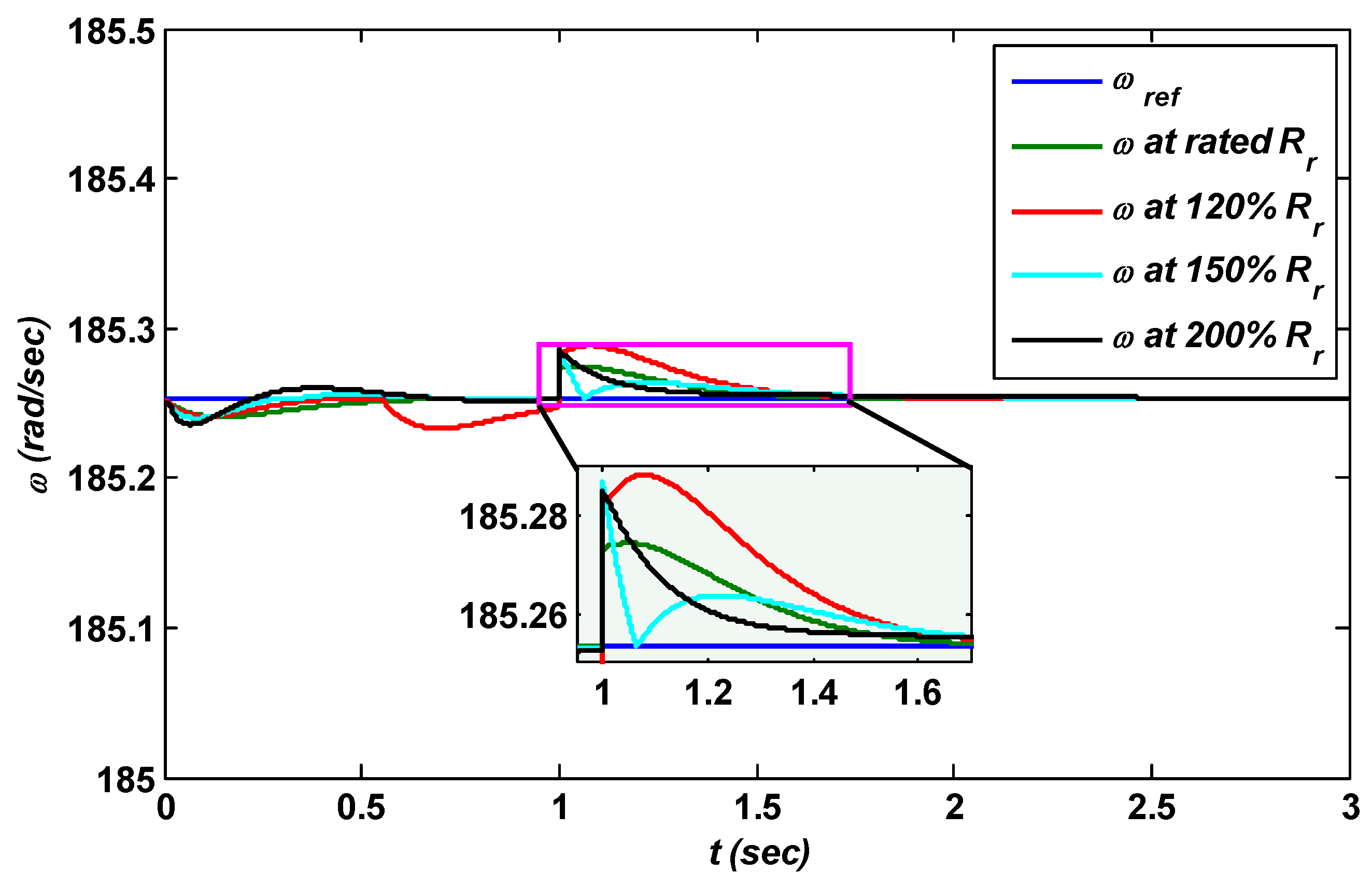
- The performance of the detuning effect of the IFOC caused by Rotor Resistance (RR) deviation at 200%, 150%, and 120% of the rated values are analyzed for proposed optimal control schemes.
- Electrical faults perturbations, e.g., double phasing, single phasing, overvoltage, and undervoltage, are scrutinized along with load disturbances in order to verify robustness and fault tolerant capability of the IFOC IM drive.
- Comparative analyses of the various proposed optimal control strategies for load disturbances concerning undershoot, overshoot, rise time, settling time, and fast response with traditionally tuned PI controller are also performed.
- Speed variation is also discussed, described, and analyzed to satisfy the requirement of variable speed drives.
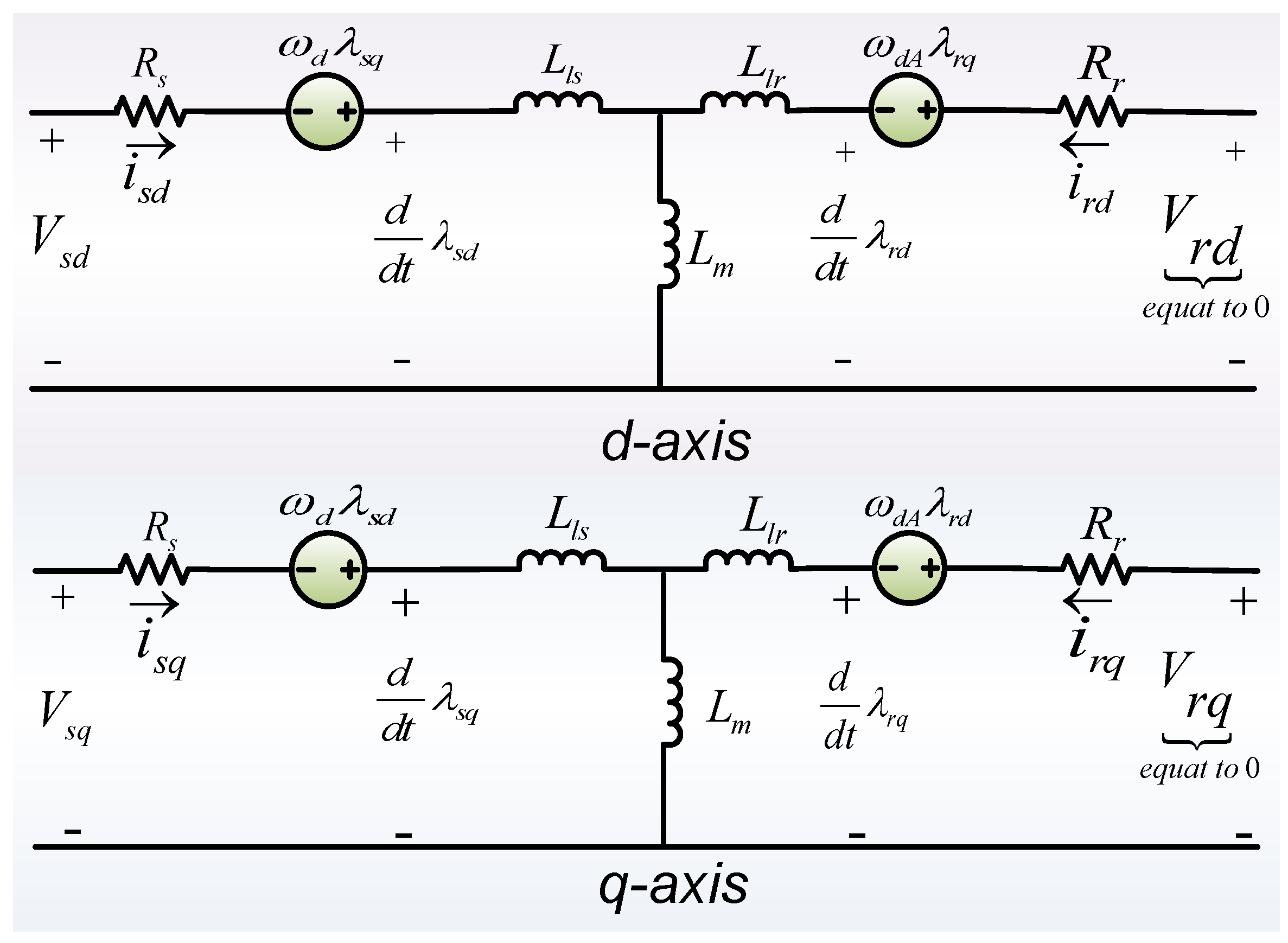
2. Modelling of IM in a Synchronous Reference Frame
2.1. Stator Model
2.2. Rotor Model
2.3. Rotor Electromagnetic Torque
2.4. Electrodynamics of IM
3. Field Oriented Control Schemes
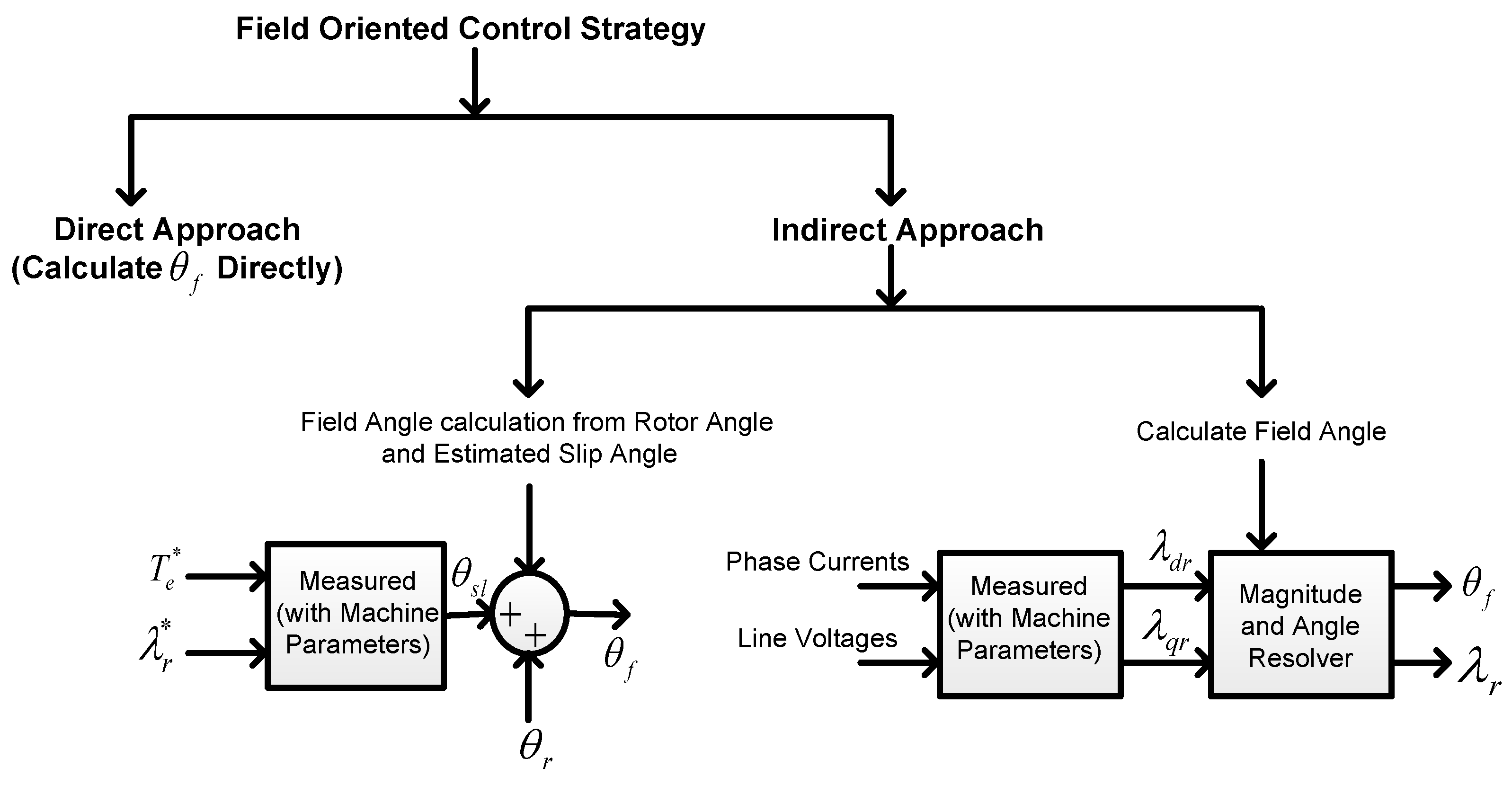
3.1. Field Oriented Control Scheme: A Taxonomy Overview
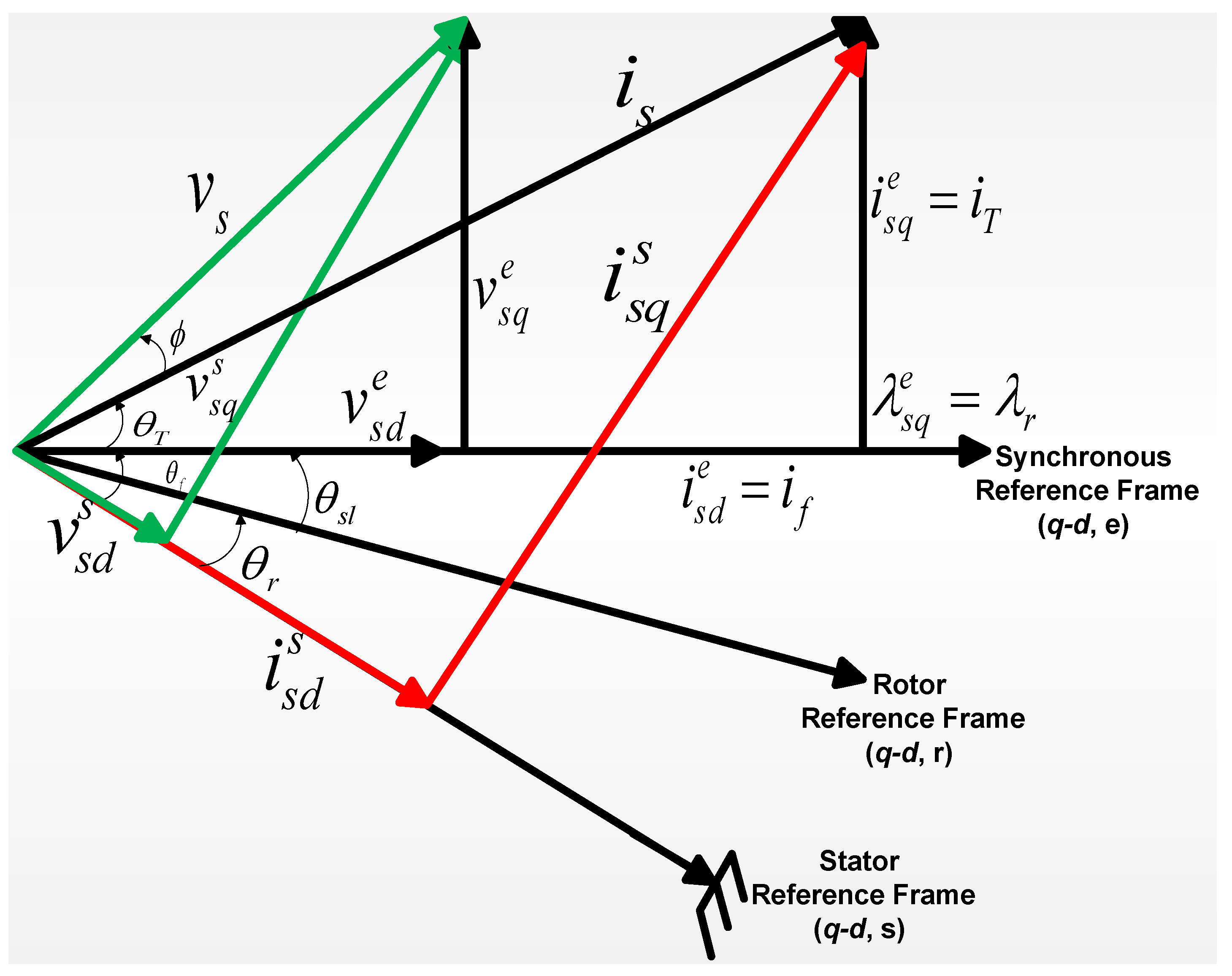
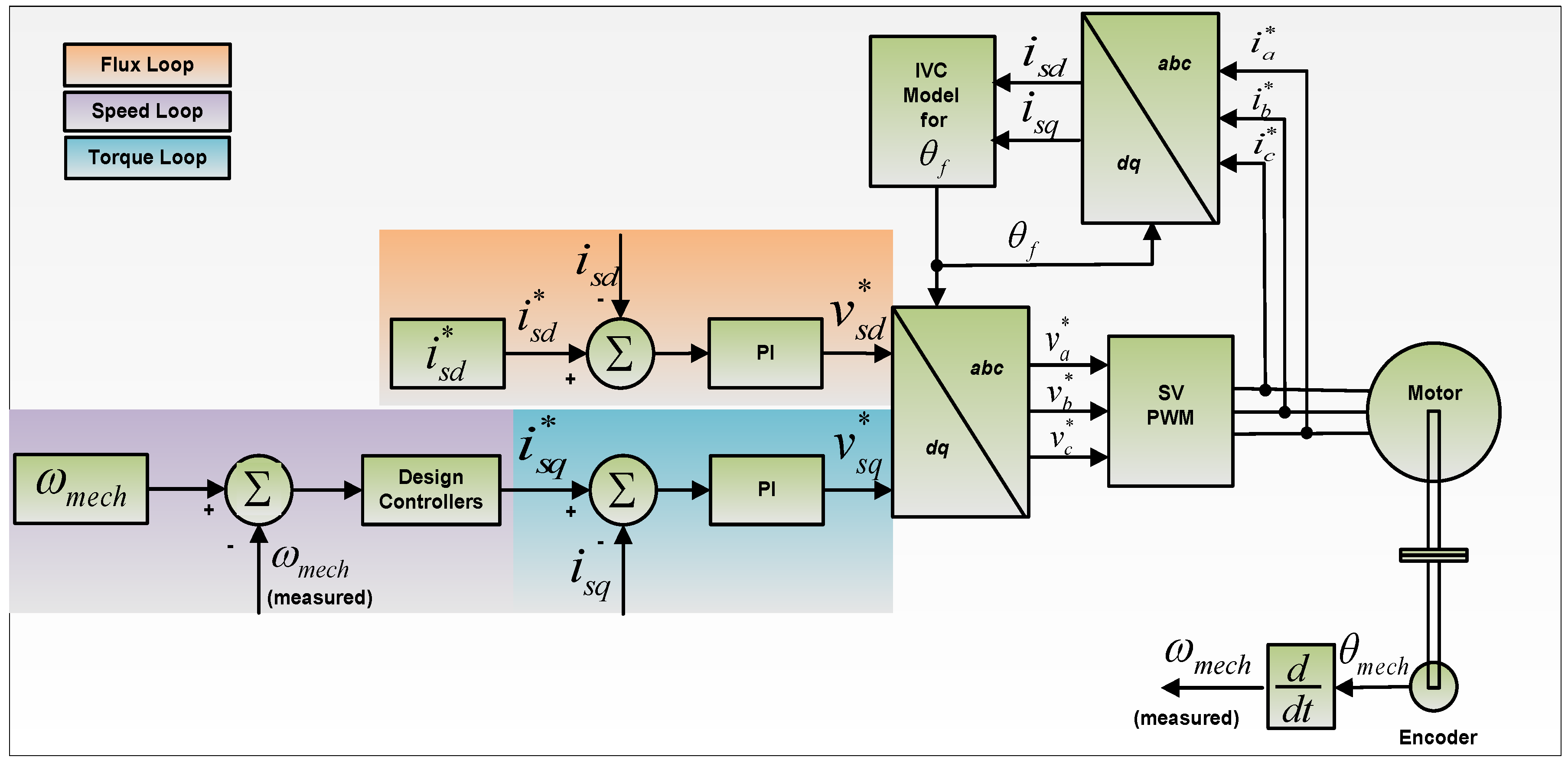
3.2. Implementation of Indirect Field Oriented Control Scheme
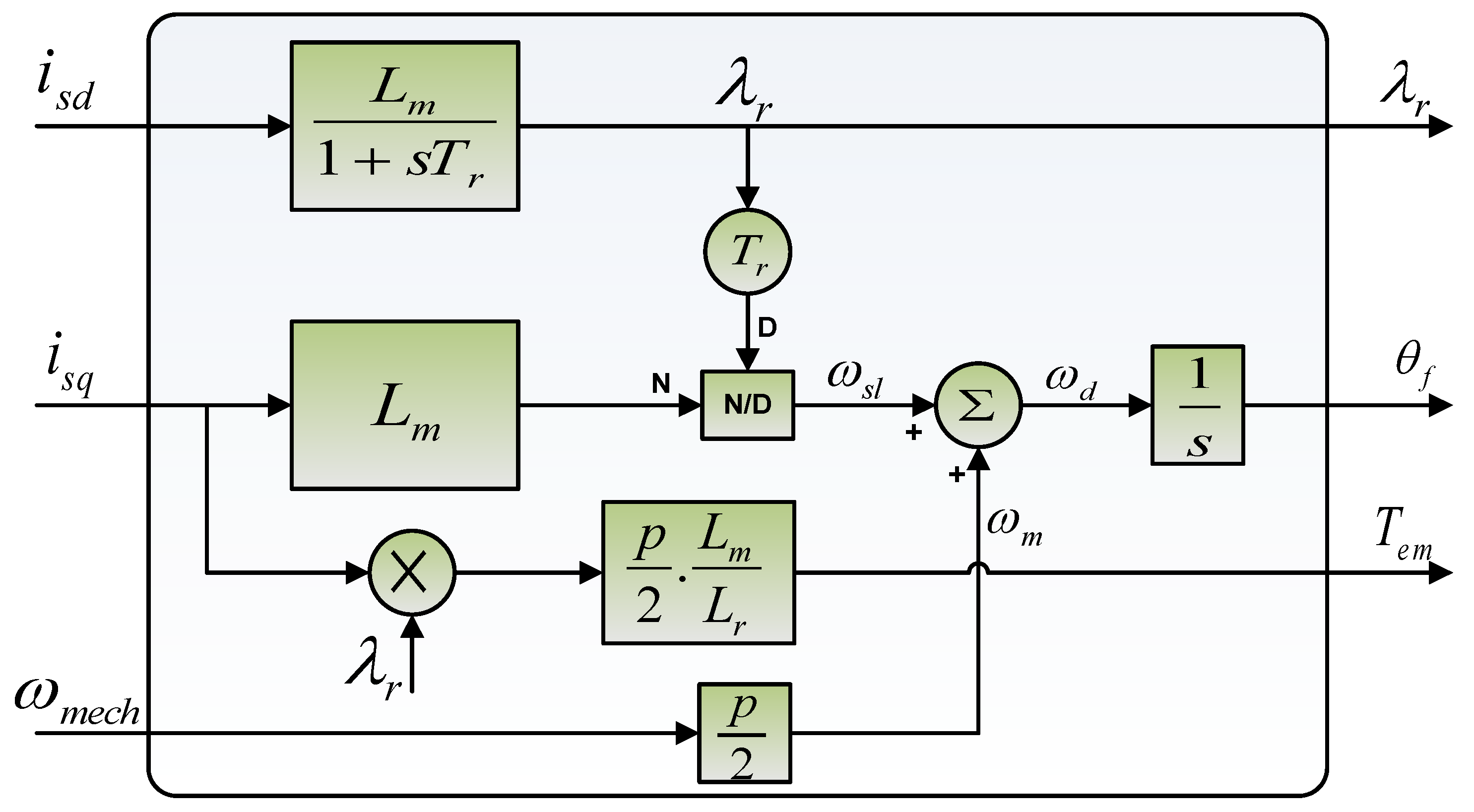
3.3. Proposed System Model of Indirect Field Oriented Control
4. Optimal Speed Controllers: A Design Overview
4.1. PI Control Scheme Design
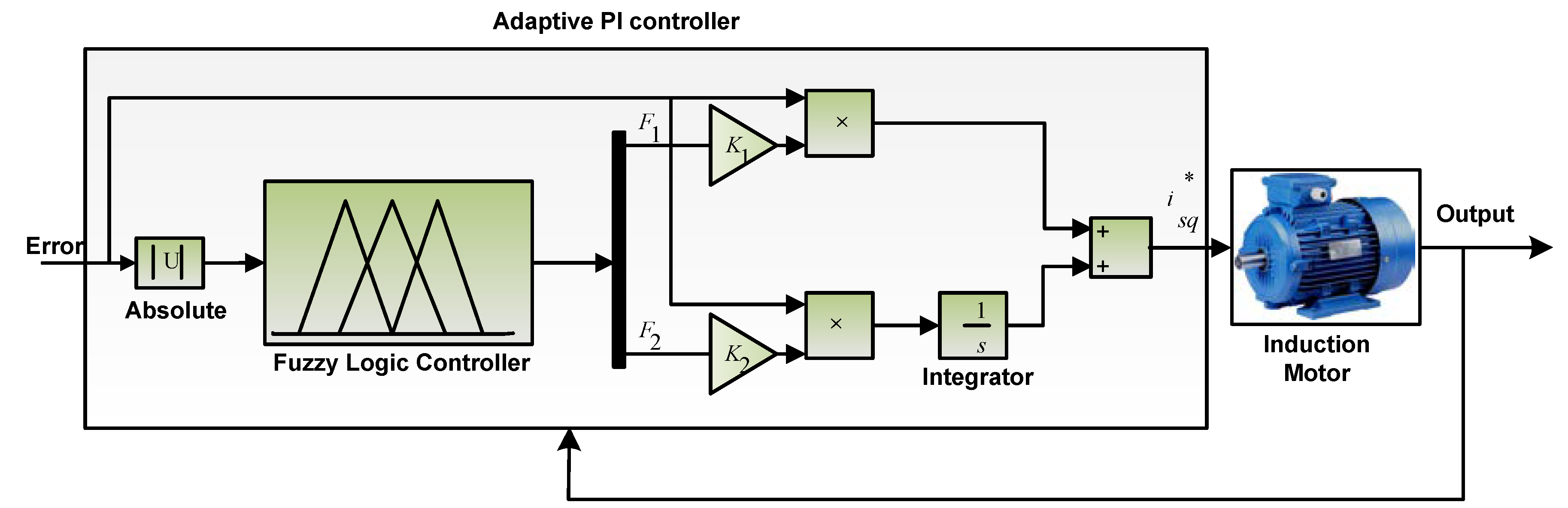
4.2. Adaptive PI Control Scheme Design
- If the absolute error is zero, then is large and is zero.
- If the absolute error is small, then is large and is small.
- If the absolute error is large, then is large and is large.
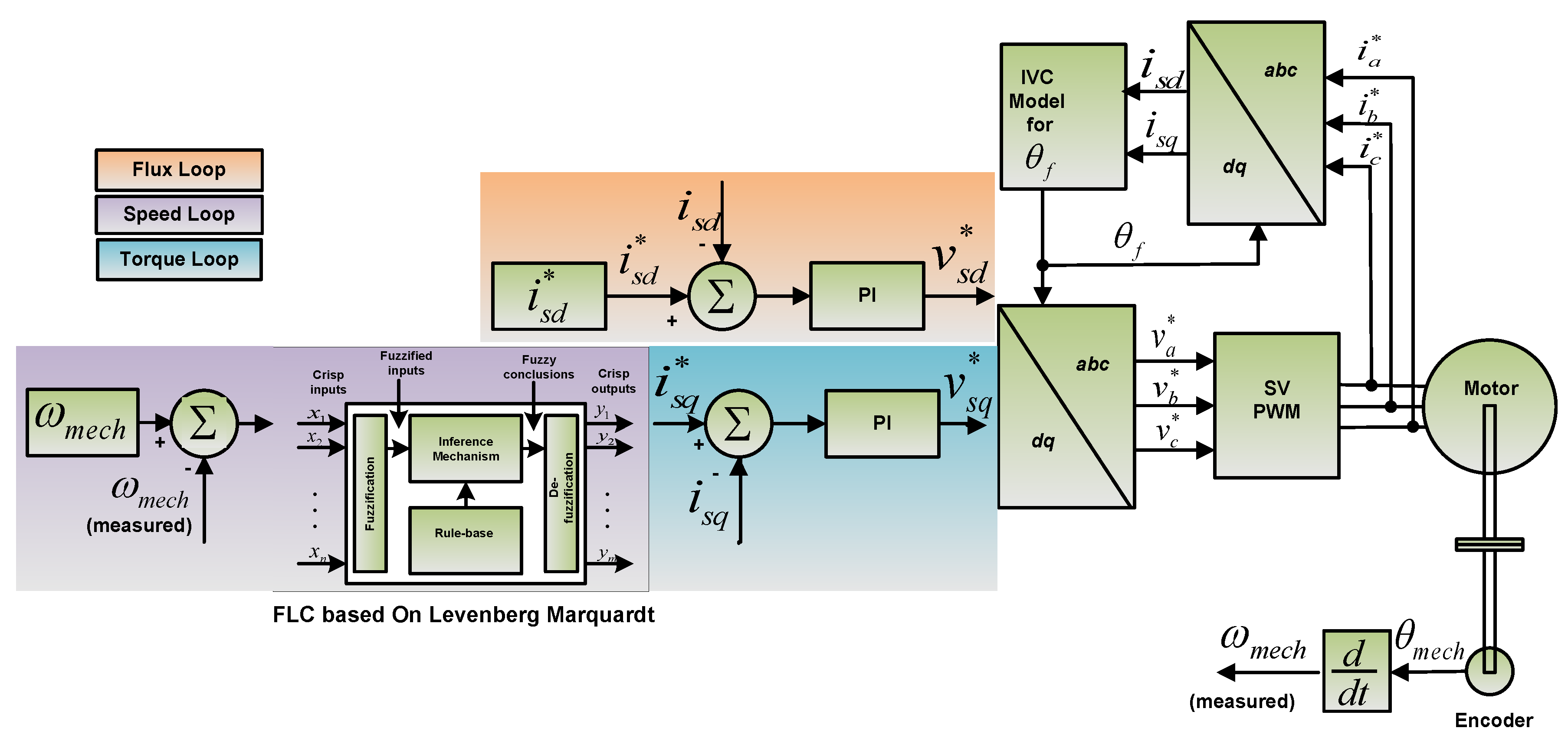
4.3. Proposed FLC based on LM
4.3.1. Controller Output Equation
4.3.2. Jacobian Calculation
4.3.3. Update Equation for Output Membership Function
4.3.4. Update Equation for Variance
4.3.5. Update Equation for Center
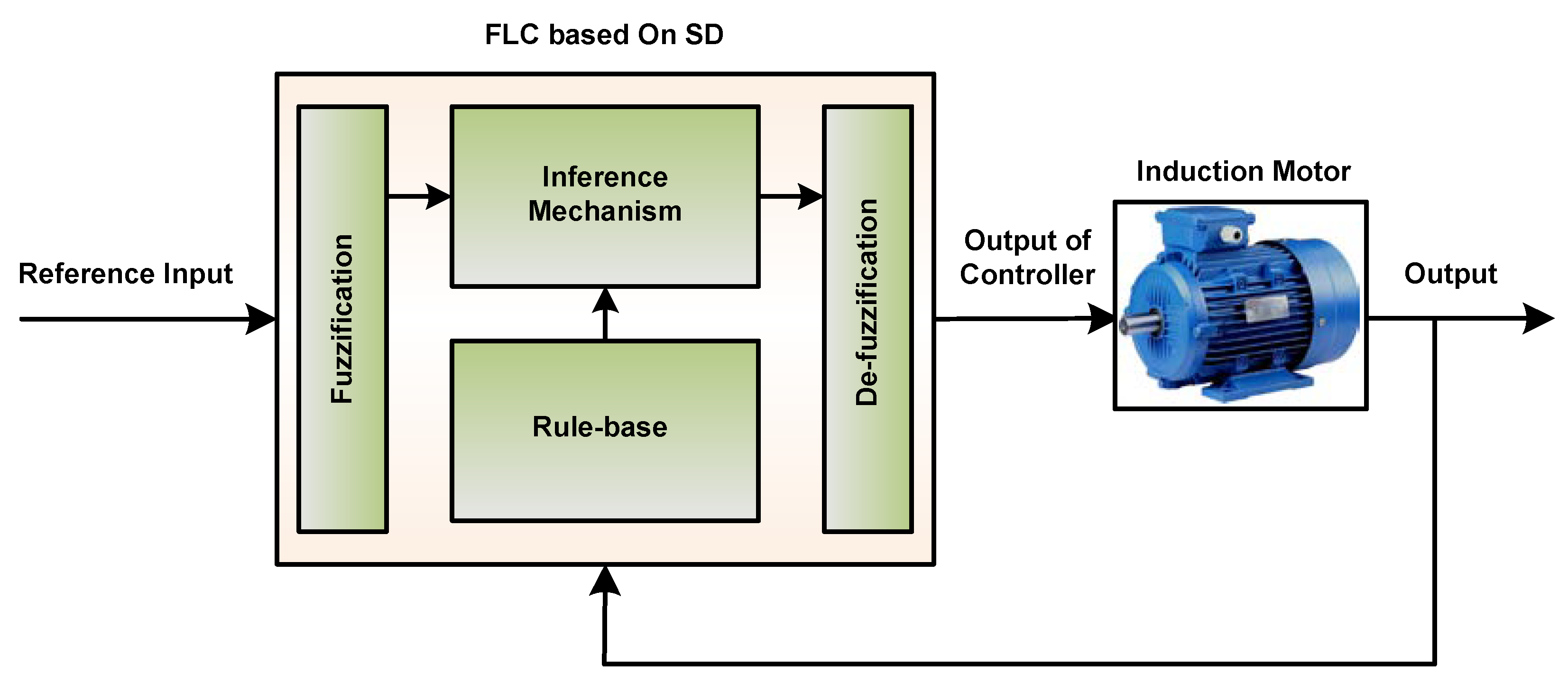
4.4. Proposed Fuzzy Logic Controller Based on SD
4.4.1. Update Equation for Output Membership Function
4.4.2. Update Equation for Variance
4.4.3. Update Equation for Center
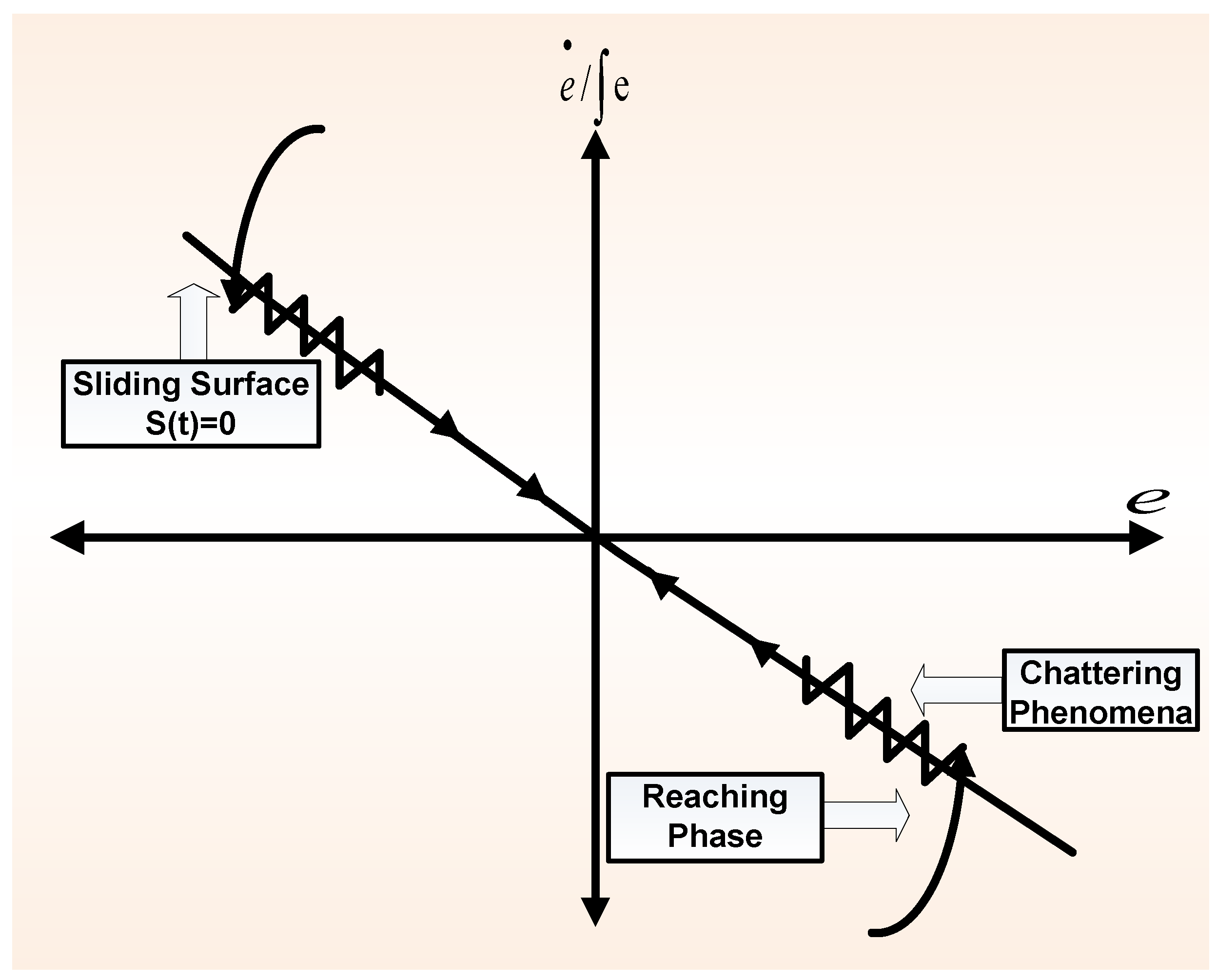
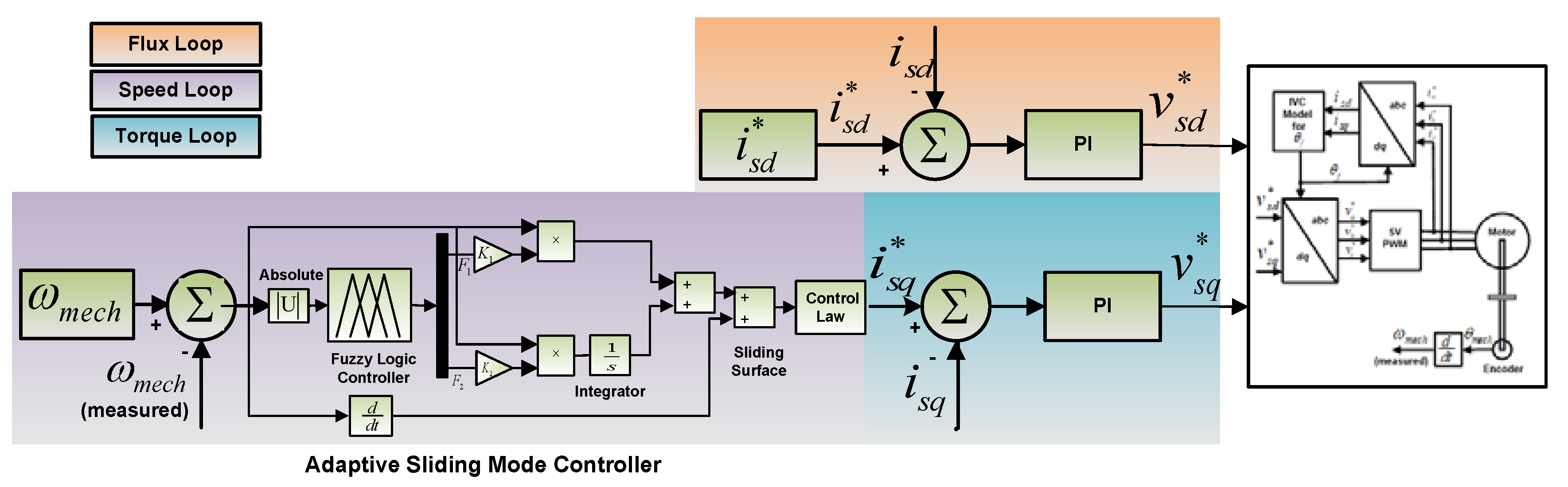
4.5. Sliding Mode Control (SMC) Strategy
4.6. Designed Hybrid Controller
5. Results and Discussions
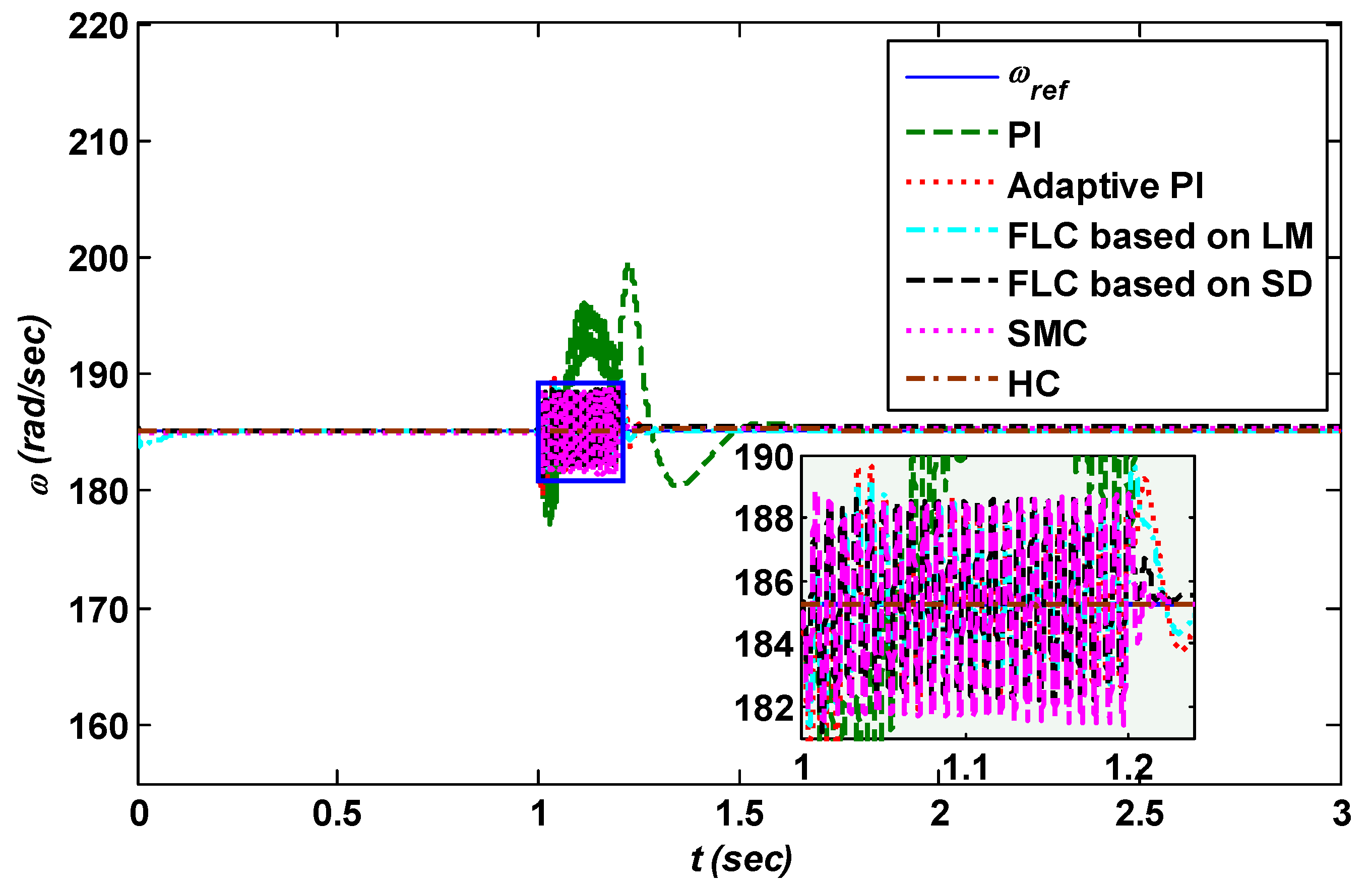
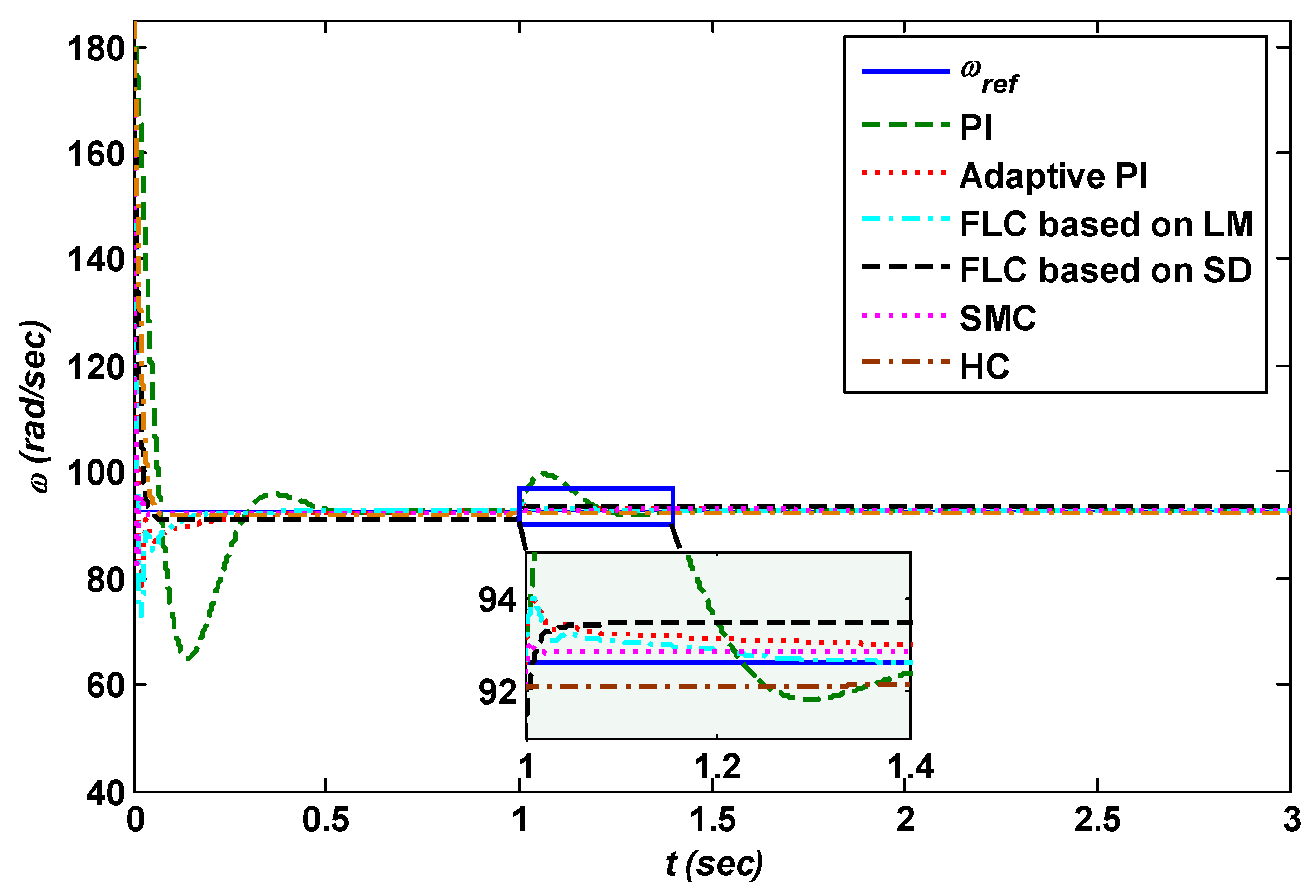
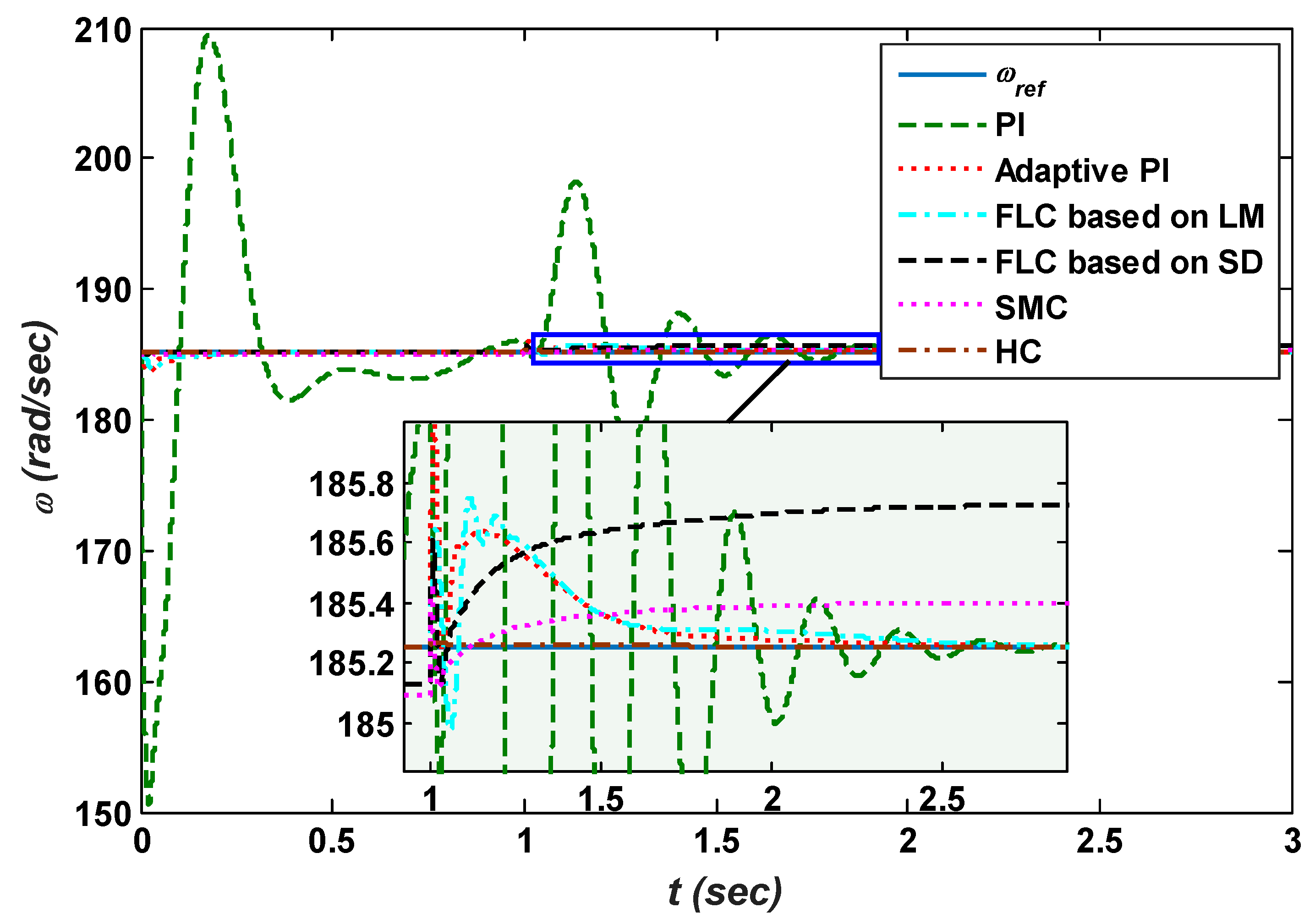
5.1. Rotor Resistance and Load Disturbances
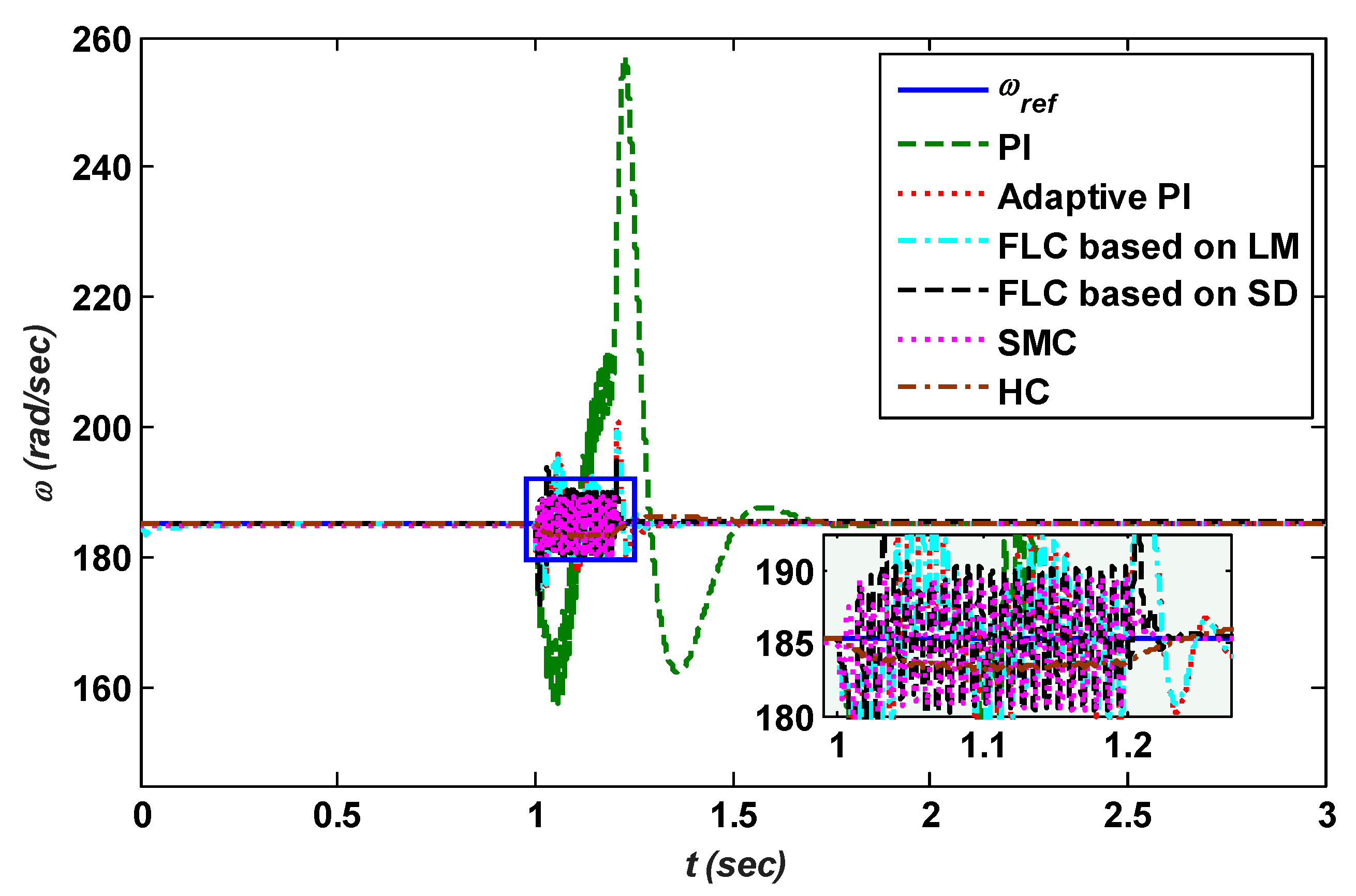
5.2. Electrical Faults with Load Variation
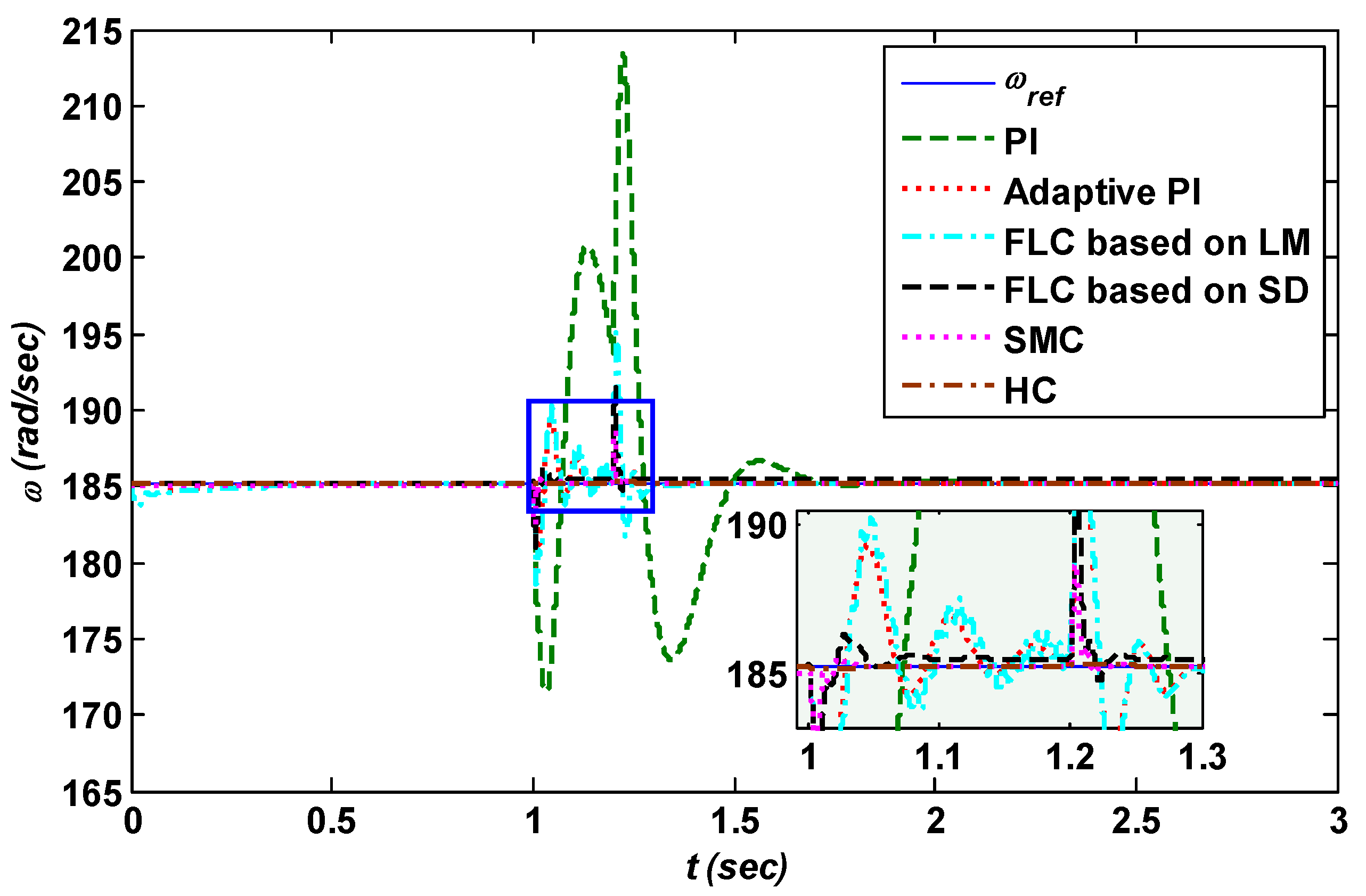
5.3. Load Disturbances in Presence of Speed Variation
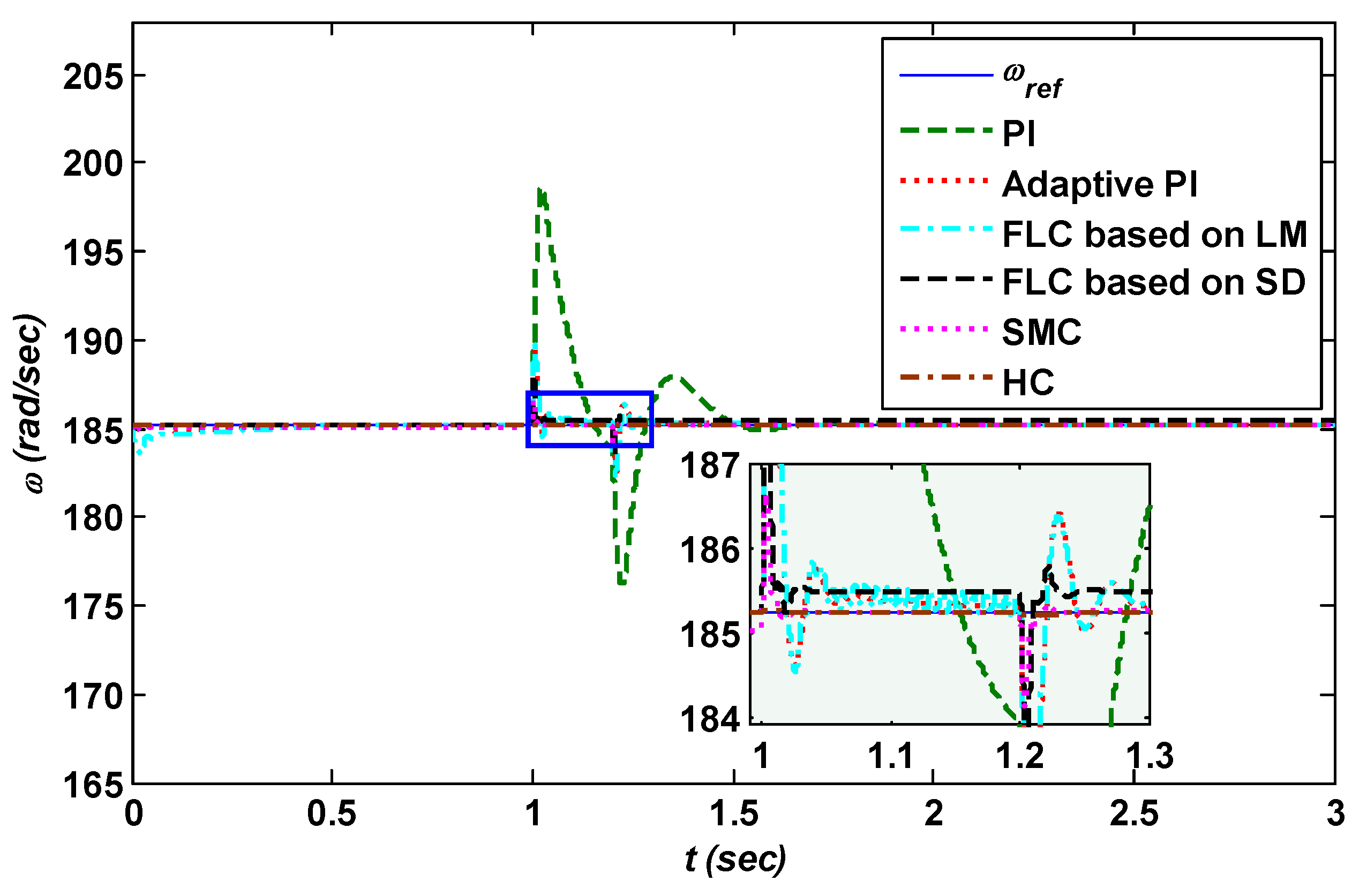
5.4. Parameter and Load Variations
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A

| IM Parameters | Values |
|---|---|
| Rated Power | 3 HP/2.4 kW |
| Phases | 3 |
| Line Voltage | 460 V (L-L, rms) |
| System Frequency | 60 Hz |
| Full Load Slip | 1.72% |
| Number of Poles | 4 |
| Switching Frequency | 20 kHz |
| Stator Resistance | |
| Stator Leakage Resistance | |
| Rotor Resistance | |
| Rotor Leakage Resistance | |
| Moment of Inertia | |
| Mutual Inductance | |
| Full Load Current | 4 A |
| Full Load Speed | 1750 rpm |
| Control Strategies | Parameter | Values |
|---|---|---|
| PI | 0.2446 | |
| 3.5298 | ||
| Adaptive PI | 0.5 | |
| 0.75 | ||
| FLC based on LM | 0.2 | |
| 0.3 | ||
| 0.11 | ||
| 0.33 | ||
| 0.7 | ||
| 0.01 | ||
| λ | 0.57 | |
| 0.66 | ||
| FLC based on Steepest Descent | 0.0001 | |
| 0.00199 | ||
| Sliding Mode | 0.2–1.5 | |
| 0.5–4 | ||
| Hybrid | 0.2 | |
| 0.88 |
References
- Tosifian, M.H.; Nazarzadeh, J. A detailed model of disk type linear induction machines. Int. Trans. Electr. Energy Syst. 2015, 25, 1736–1747. [Google Scholar] [CrossRef]
- Uddin, M.N.; Huang, Z.R.; Hossain, A.B.M.S. Development and Implementation of a Simplified Self-Tuned Neuro–Fuzzy-Based IM Drive. IEEE Trans. Ind. Appl. 2014, 50, 51–59. [Google Scholar] [CrossRef]
- Jain, J.K.; Ghosh, S.; Maity, S. A Numerical Bifurcation Analysis of Indirect Vector-Controlled Induction Motor. IEEE Trans. Control Syst. Technol. 2018, 26, 282–290. [Google Scholar] [CrossRef]
- Kan, J.; Zhang, K.; Wang, Z. Indirect vector control with simplified rotor resistance adaptation for induction machines. IEEE Trans. Power Electron. 2015, 8, 1284–1294. [Google Scholar] [CrossRef]
- Pereira, W.C.A.; Oliveira, C.M.R.; Santana, M.P.; Almeida, T.E.P.; Castro, A.G.; Paula, G.T.; Aguiar, M.L. Improved Sensorless Vector Control of Induction motor Using Sliding Mode Observer. IEEE Lat. Am. Trans. 2016, 14, 3110–3116. [Google Scholar] [CrossRef]
- Amezquita-Brooks, L.; Liceaga-Castro, J.; Liceaga-Castro, E. Speed and position controllers using indirect field-oriented control: A classical control approach. IEEE Trans. Ind. Electron. 2014, 61, 1928–1943. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C.; Xiao, D. Muhammed Fazlur Rahman: ‘Predictive torque control of induction motor sensorless drive fed by a 3L-NPC inverter’. IEEE Trans. Ind. Inf. 2017, 13, 60–70. [Google Scholar] [CrossRef]
- Guzinski, J.; Abu-Rub, H. Speed sensorless induction motor drive with predictive current controller. IEEE Trans. Ind. Electron. 2011, 60, 272–282. [Google Scholar] [CrossRef]
- Teja, A.V.R.; Chakraborty, C.; Maiti, S.; Hori, Y. A new model reference adaptive controller for four quadrant vector controlled induction motor drives. IEEE Trans. Ind. Electron. 2012, 59, 3757–3767. [Google Scholar] [CrossRef]
- Uddin, M.N.; Nam, S.W. Development and implementation of a nonlinear-controller-based IM drive incorporating iron loss with parameter uncertainties. IEEE Trans. Ind. Electron. 2009, 56, 1263–1272. [Google Scholar] [CrossRef]
- Konstantopoulos, G.C.; Alexandridis, A.T.; Mitronikas, E.D. Bounded nonlinear stabilizing speed regulators for VSI-Fed induction motors in field-oriented operation. IEEE Trans. Control Syst. Technol. 2014, 22, 1112–1121. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New sliding mode observer for position sensorless control of permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Barambones, O.; Alkorta, P. Position Control of the Induction Motor Using an Adaptive Sliding-Mode Controller and Observers. IEEE Trans. Ind. Electron. 2014, 61, 6556–6565. [Google Scholar] [CrossRef]
- Leu, V.Q.; Choi, H.H.; Jung, J.-W. Fuzzy sliding mode speed controller for PM synchronous motors with a load torque observer. IEEE Trans. Power Electron. 2012, 27, 1530–1539. [Google Scholar] [CrossRef]
- Zaky, M.S.; Metwaly, M.K. A Performance Investigation of a Four Switch Three-Phase Inverter-Fed IM Drives at Low Speeds Using Fuzzy Logic and PI Controllers. IEEE Trans. Power Electron. 2017, 32, 3741–3753. [Google Scholar] [CrossRef]
- Zerikat, M.; Mechernene, A.; Chekroun, S. High-performance sensorless vector control of induction motor drives using artificial intelligent technique. Eur. Trans. Electr. Power 2011, 21, 787–800. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. A novel neural network vector control technique for induction motor drive. IEEE Trans. Energy Convers. 2015, 30, 1428–1437. [Google Scholar] [CrossRef]
- Farasat, M.; Trzynadlowski, A.M.; Fadali, M.S. Efficiency improved sensorless control scheme for electric vehicle induction motors. IET Electr. Syst. Transp. 2014, 4, 122–131. [Google Scholar] [CrossRef]
- Su, K.-H.; Kung, C.-C. Supervisory enhanced genetic algorithm controller design and its application to decoupling induction motor drive. IEEE Electr. Power Appl. 2005, 152, 1015–1026. [Google Scholar] [CrossRef]
- Benlaloui, I.; Drid, S.; Chrifi-Alaoui, L.; Ouriagli, M. Implementation of a new MRAS speed sensorless vector control of induction machine. IEEE Trans. Energy Convers. 2015, 30, 588–595. [Google Scholar] [CrossRef]
- Basilio, J.C.; Silva, J.A., Jr.; Rolim, L.G.B.; Moreira, M.V. H∝ design of rotor flux-oriented current-controlled induction motor drives: Speed control, noise attenuation and stability robustness. IET Control Theory Appl. 2010, 3, 2491–2505. [Google Scholar] [CrossRef]
- Arun Kumar, R.; Febin Daya, J.L. A novel self—Tuning fuzzy based PID controller for speed control of induction motor drive. In Proceedings of the International Conference on Control Communication and Computing (ICCC), Thiruvananthapuram, India, 13–15 December 2013; pp. 62–66. [Google Scholar]
- Yue, Y.; Lin, Y.; Yin, Z. A novel induction motor with fuzzy sliding-mode control. In Proceedings of the IEEE Conference on Chinese Control (CCC), Yantai, China, 22–24 July 2011; pp. 1835–1838. [Google Scholar]
- Mohan, N. Advance Electric Drives Analysis, Control and Modeling Using SIMULINK; MNPERE: Minneapolis, MN, USA, 2001; ISBN 978-1-118-48548-4. [Google Scholar]
- Zeb, K.; Uddin, W.; Haider, A.; Belal, S.; Mehmood, C.A.; Khan, M.A.; Kim, H.J. Robust speed regulation of indirect vector control induction motor using fuzzy logic controllers based on optimization algorithms. Electr. Eng. 2018, 100, 787–802. [Google Scholar] [CrossRef]
- Harb, A.M.; Smadi, I.A. An Approach to Fuzzy Control for a Class of Nonlinear Systems: Stability and Design Issues. Int. J. Model. Simul. 2015, 25, 106–111. [Google Scholar] [CrossRef]
- Wilamowski, B.M.; Yu, H. Improved computation for Levenberg Marquardt training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Zeb, K.; Ali, Z.; Saleem, K.; Uddin, W.; Javed, M.A.; Christofides, N. Indirect field-oriented control of induction motor drive based on adaptive fuzzy logic controller. Electr. Eng. 2017, 99, 803–815. [Google Scholar] [CrossRef]
- Dominguez, J.R.; Mora-Soto, C.; Ortega-Cisneros, S.; Panduro, J.J.R.; Loukianov, A.G. Copper and core loss minimization for induction motors using high-order sliding-mode control. IEEE Trans. Ind. Electron. 2012, 59, 2877–2889. [Google Scholar] [CrossRef]
- Dominguez, J.R. Discrete-Time Modeling and Control of Induction Motors by Means of Variational Integrators and Sliding Modes—Part I: Mathematical Modeling. IEEE Trans. Ind. Electron. 2015, 62, 5393–5401. [Google Scholar] [CrossRef]
- Hannan, M.A.; Ali, J.A.; Mohamed, A.; Amirulddin, U.A.U.; Tan, N.M.L.; Uddin, M.N. Quantum-Behaved Lightning Search Algorithm to Improve Indirect Field-Oriented Fuzzy-PI Control for IM Drive. In Proceedings of the 2017 IEEE Industry Applications Society Annual Meeting, Cincinnati, OH, USA, 1–5 October 2017. [Google Scholar]
- Saghafinia, A.; Ping, H.W.; Uddin, M.N.; Gaeid, K.S. Adaptive Fuzzy Sliding-Mode Control into Chattering-Free IM Drive. IEEE Trans. Ind. Appl. 2015, 51, 692–702. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















| Control Strategies | OS | US | RT | FT | IAE | ISE | ITAE |
|---|---|---|---|---|---|---|---|
| PI | (1). 6.746 | (1). 0.754 | (1). 37.82 | (1). 103.8 | (1). 0.997 | (1). 4.792 | (1). 1.114 |
| (2). 6.770 | (2). 0.753 | (2). 31.88 | (2). 14.11 | (2). 3.295 | (2). 32.96 | (2). 1.312 | |
| (3). 6.781 | (3). 0.454 | (3). 33.59 | (3). 120.4 | (3). 1.425 | (3). 4.318 | (3). 1.232 | |
| (4). 10.14 | (4). 25.25 | (4). 35.27 | (4). 279.0 | (4). 1.864 | (4). 4.858 | (4). 1.515 | |
| Adaptive PI | (1). 1.106 | (1). 1.554 | (1). 373.3 | (1). 2.760 | (1). 0.315 | (1). 0.170 | (1). 0.147 |
| (2). 1.103 | (2). 1.654 | (2). 337.1 | (2). 4.044 | (2). 0.286 | (2). 0.151 | (2). 0.146 | |
| (3). 1.026 | (3). 1.754 | (3). 181.9 | (3). 3.490 | (3). 0.222 | (3). 0.120 | (3). 0.126 | |
| (4). 1.186 | (4). 1.854 | (4). 127.8 | (4). 3.405 | (4). 0.223 | (4). 0.118 | (4). 0.144 | |
| FL based on LM | (1). 0.246 | (1). 0.554 | (1). 265.2 | (1). 2.656 | (1). 0.235 | (1). 0.134 | (1). 0.106 |
| (2). 0.346 | (2). 0.204 | (2). 11.38 | (2). 4.238 | (2). 0.298 | (2). 1.352 | (2). 0.102 | |
| (3). 0.345 | (3). 0.203 | (3). 181.9 | (3). 3.490 | (3). 0.222 | (3). 0.120 | (3). 0.126 | |
| (4). 0.376 | (4). 0.199 | (4). 126.6 | (4). 3.731 | (4). 0.296 | (4). 0.197 | (4). 0.200 | |
| FL based on SD | (1). 0.666 | (1). 0.001 | (1). 2.021 | (1). 6.335 | (1). 0.498 | (1). 0.125 | (1). 0.997 |
| (2). 0.665 | (2). 0.079 | (2). 1.933 | (2). 4.060 | (2). 0.559 | (2). 0.150 | (2). 1.104 | |
| (3). 0.664 | (3). 0.194 | (3). 1.199 | (3). 243.5 | (3). 0.650 | (3). 0.193 | (3). 1.267 | |
| (4). 0.663 | (4). 0.424 | (4). 1.623 | (4). 253.5 | (4). 0.784 | (4). 0.257 | (4). 1.470 | |
| SM | (1). 0.236 | (1). 0.224 | (1). 812.8 | (1). 0.010 | (1). 0.254 | (1). 0.056 | (1). 0.153 |
| (2). 0.237 | (2). 0.301 | (2). 697.8 | (2). 808.0 | (2). 0.209 | (2). 0.021 | (2). 0.220 | |
| (3). 0.356 | (3). 0.363 | (3). 609.7 | (3). 0.001 | (3). 0.248 | (3). 0.022 | (3). 0.337 | |
| (4). 0.376 | (4). 0.365 | (4). 669.4 | (4). 0.001 | (4). 0.290 | (4). 0.030 | (4). 0.471 | |
| Hybrid | (1). 0.036 | (1). 0.014 | (1). 12.08 | (1). 21.19 | (1). 0.010 | (1). .0001 | (1). 0.007 |
| (2). 0.037 | (2). 0.016 | (2). 0.001 | (2). 168.1 | (2). 0.021 | (2). .0004 | (2). 0.019 | |
| (2). 0.038 | (3). 0.017 | (3). 0.006 | (3). 192.9 | (3). 0.010 | (3). .0005 | (3). 0.008 | |
| (4). 0.040 | (4). 0.019 | (4). 0.008 | (4). 143.4 | (4). 0.009 | (4). .0006 | (4). 0.009 |
| Ref. | CS | IFOC | PV | LV | EFP | CP | R |
|---|---|---|---|---|---|---|---|
| [1] | ADSMCS | √ | √ | √ | × | √ | √ |
| [4] | NF and PI | √ | √ | × | × | √ | √ |
| [19] | FSM and PI | √ | × | √ | × | × | √ |
| [20] | ASMC | √ | √ | √ | × | × | √ |
| [30] | FL and PI | √ | √ | √ | × | × | × |
| [31] | AFSMC and PI | √ | √ | √ | × | × | √ |
| Our Work | PI | √ | √ | √ | √ | √ | × |
| Adaptive PI | √ | √ | √ | √ | × | √ | |
| FLC based on LM | √ | √ | √ | √ | × | √ | |
| FLC based on SD | √ | √ | √ | √ | × | √ | |
| SMC | √ | √ | √ | √ | × | √ | |
| HC | √ | √ | √ | √ | × | √ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeb, K.; Din, W.U.; Khan, M.A.; Khan, A.; Younas, U.; Busarello, T.D.C.; Kim, H.J. Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations. Energies 2018, 11, 2339. https://doi.org/10.3390/en11092339
Zeb K, Din WU, Khan MA, Khan A, Younas U, Busarello TDC, Kim HJ. Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations. Energies. 2018; 11(9):2339. https://doi.org/10.3390/en11092339
Chicago/Turabian StyleZeb, Kamran, Waqar U. Din, Muhammad Adil Khan, Ayesha Khan, Umair Younas, Tiago Davi Curi Busarello, and Hee Je Kim. 2018. "Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations" Energies 11, no. 9: 2339. https://doi.org/10.3390/en11092339
APA StyleZeb, K., Din, W. U., Khan, M. A., Khan, A., Younas, U., Busarello, T. D. C., & Kim, H. J. (2018). Dynamic Simulations of Adaptive Design Approaches to Control the Speed of an Induction Machine Considering Parameter Uncertainties and External Perturbations. Energies, 11(9), 2339. https://doi.org/10.3390/en11092339