1. Introduction
The use of wind energy has grown rapidly in the past decade, as wind turbine generators (WTG) are fuel-free and emissions-free [
1]. Dramatically different from conventional synchronous generators, WTG output relies significantly on random wind speed, and the rotor speed of dominant type WTG is decoupled from the system frequency with no inertial capability [
2]. These factors limit the further penetration of WTG in the power system. Also, primary frequency control (PFC) for synchronous generators is inappropriate for WTG. Thus, WTG with PFC abilities have become a topic of interest in the WTG research field.
Initially, WTG had no PFC function, due to the maximum power point tracking (MPPT) operation. Authors such as [
3,
4,
5] have proposed the concept of virtual inertia, in which kinetic energy stored in the spinning rotor of WTG is released depending on frequency deviations. However, the accessible kinetic energy is limited, and may lead to secondary frequency drops in some cases. On the other hand, the concept of de-loaded operation for WTG in PFC was proposed in [
4,
6,
7,
8,
9,
10], which preserves the generating margin by keeping the WTG in a de-loaded operational state. In detail, shifting the maximum power point to the right sub-optimal point by overspeed rotor control is often adopted in the de-loaded control [
6,
7]. Pitch angle control is another example of de-loaded operation when wind speed is high [
8,
9]. Meanwhile, coordinated overspeed rotor control and pitch angle control [
4,
10] enable WTG to perform better in PFC. For example, the authors in [
4] propose a PFC strategy by controlling the generator torque and the pitch angle using the real-time reference values, but without exploring a way to obtain them. Although promising, the de-loaded operation of WTG results in the loss of green energy due to a sub-optimal operation point, and makes it difficult for WTG to avoid unexpected issues in the longer term unless some dramatic steps are taken in this direction.
Realizing these dangers, several grid operators have embarked on storage technologies. For example, large scale energy storage systems (ESS) are being installed in California and a similar proposal has been made by the Australian Energy Market Operator (AEMO) [
11]. Meanwhile, ESS have been utilized in PFC for WTG in the research field, such as [
12,
13,
14]. This research shows that generally, with the support of ESS, wind-storage systems (WSS) become more reliable in PFC, but the large capacity of ESS cannot be avoided as WTG operate on the maximum power point. Thus, to combine the advantages of both sides, de-loaded WTG operation with the assistance of ESS has become the typical way for WSS in load frequency control (LFC), as mentioned in [
15,
16]. Also, the authors in [
17] suggested a PFC method using variable droop coefficients, which reduces the stress on WTG and battery energy storage systems (BESS), especially when wind speed is low. Similarly, variable droop coefficients were applied in [
18,
19,
20] to enable WSS to undertake the proper frequency regulation responsibility according to their real-time capability. In particular, a dynamic schedule and control strategy for WSS in LFC is proposed in [
21], and a simple wind power prediction method is used to improve the frequency regulation performance of WSS. The authors in [
22] also mention that short-term forecasting is the key to supporting unit commitment and economic dispatch.
Currently, the best way to dispatch WSS in the PFC has not been agreed upon by transmission system operators (TSOs) worldwide. Whether WSS is dispatch-friendly from the perspective of TSOs has become a major issue, which can be addressed with two improvements.
On the one hand, a proper and accurate prediction method must be selected. In previous research, the models that have been popularly applied to wind power prediction can be classified into three categories: physical models, statistical models and hybrid models. Specifically, physical methods, such as numerical weather prediction (NWP), are appropriate for long-term predictions [
23]. Statistical models, including linear models and non-linear models are trained using historical data and usually outperform NWP models in short-term forecasting. Linear models such as auto regressive (AR), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA) are most widely used in [
24,
25,
26]. Those methods perform well especially in short-term predictions. Furthermore, artificial neutral network (ANN) as a kind of most popular non-linear method in wind power prediction is shown in [
27,
28,
29]. Typically, the back propagation neural network (BPNN), as shown in [
27], is used to approximate the time series method, but is highly reliant on experience. Similarly, [
28] proposes a lower upper bound estimation (LUBE) method to overcome the instability of neural network because it gives more freedom and flexibility. Also, [
29] develops a forecasting engine wavelet ANN with a stochastic search technique for training the forecasting engine, capturing highly non-linear patterns in the data. Lastly, hybrid models combine different prediction methods. For example, a hybrid multi-model methodology is developed in [
30], which combines multiple different machine learning algorithms including ANN, support vector machine (SVM), gradient boosting machine, and random forest, is relevant for different time horizons in short-term predictions. As shown in [
31], another hybrid model is proposed for very short-term wind power ensemble forecasting when NWP is unavailable. Additionally, Kalman filter (KF) as a post-processing method can be combined with prediction methods to improve the performance. Weather research and forecasting with KF are combined as a prediction system in [
32] for short-term wind power prediction. In [
33], KF is used to support an SVM to improve the accurate of short-term wind speed prediction.
On the other hand, from the perspective of TSOs, taking full advantage of the current electricity market rules is an effective way to make WTG more dispatchable, which prevents WTG with real-time variable droop coefficients. Therefore, to make WSS more dispatchable, a PFC with prediction-based droop coefficient (PDC) for a utility-scale WSS is proposed in this paper. Specifically, the possible WTG output power and the trend of frequency deviations are forecasted, then this evidence is used to update the equivalent droop coefficient (
) of WSS every short time intervals. Various signals such as historical frequency (
), WTG output (
) data and real-time system frequency deviations (
), wind speed (
) are considered to ensure the WSS provide power output (
) following
continuously. Additionally, compared with the control strategy in [
21], two improvements are highlighted in PDC-PFC. First of all, WSS are more easily dispatched by the TSO, as the droop coefficients of WSS stay constant in every bidding interval. Meanwhile, KF-AR is selected as an accurate and proper method to make wind power prediction because AR performs well when the weather conditions are stable, especially in very short-term prediction. Also, the state matrix and measurement matrix form of KF are easier to combine with AR. In addition, although AR reflects less characteristics of WTG historical data than ANN, with the support of BESS that drawback can be addressed.
In summary, the rest of the paper is organized as follows: the existing re-bids mechanism in the real-time spot market is introduced in
Section 2, and the proposed PDC-PFC for WSS is introduced in
Section 3.
Section 4 provides the simulation results followed by the conclusions in
Section 5.
2. Bidding and Operation Mechanism of WSS under Spot Market Rules
A typical hybrid power system includes thermal generators and WSS, physically connected to the grid and dispatched by the TSO. To guarantee the stability of the system, the TSO dispatches generators according to their bids of supply and supply reserve. Thus, PFC ability is one of the compulsory considerations when the TSO dispatches the renewables.
Generally, the spot market bidding mechanism is very similar in many countries, including Australia’s National Electricity Market. The responsibility of the bidding mechanism is to balance the electricity demand and supply by dispatching the generated power through the spot market [
34]. In detail, the complete bidding mechanism includes the daily bid process, the re-bid process, and the default bid process [
35]. The daily bid process is for both conventional generators and WTG submitting their bids day-ahead. The re-bid process allows generators to update their bids according to the real-time conditions, to match the supply and demand more instantaneously. Normally, generators are allowed to submit their re-bids up until approximately five minutes prior to the TSO without changing the offer price [
35]. Authors have noticed that WTG are price-insensitive generators but suffer noticeable errors in the daily bids [
36], which can be effectively reduced in the re-bid process. Additionally, the default bid process involves standing bids that apply when no daily bid has been made. In summary, the re-bid process reduces the prediction period effectively, benefiting the prediction accuracy.
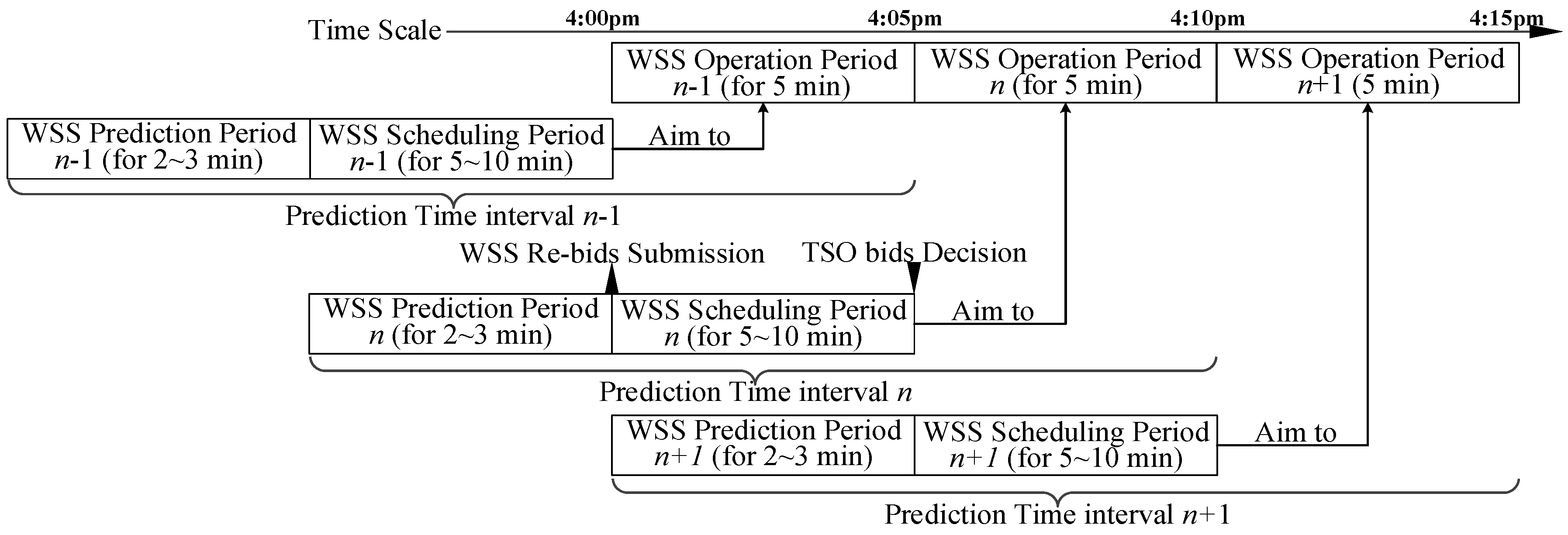
The operation loop of WSS in the re-bid process proposed in this paper is expressed in
Figure 1. For example, WSS tend to be dispatched in the operational period between 4:05 p.m. and 4:10 p.m. WSS should submit their re-bids (
and
) 5~10 min earlier, and the TSO can re-schedule the generators’ bids in the market pool during the scheduling period and decide the generation combinations at 4:05 p.m. Before, WSS also spare 2~3 min as a prediction period to decide the re-bid submission. The time taken from the prediction period to the operation period is defined as the prediction time interval (PTI) and is typically 15 min.
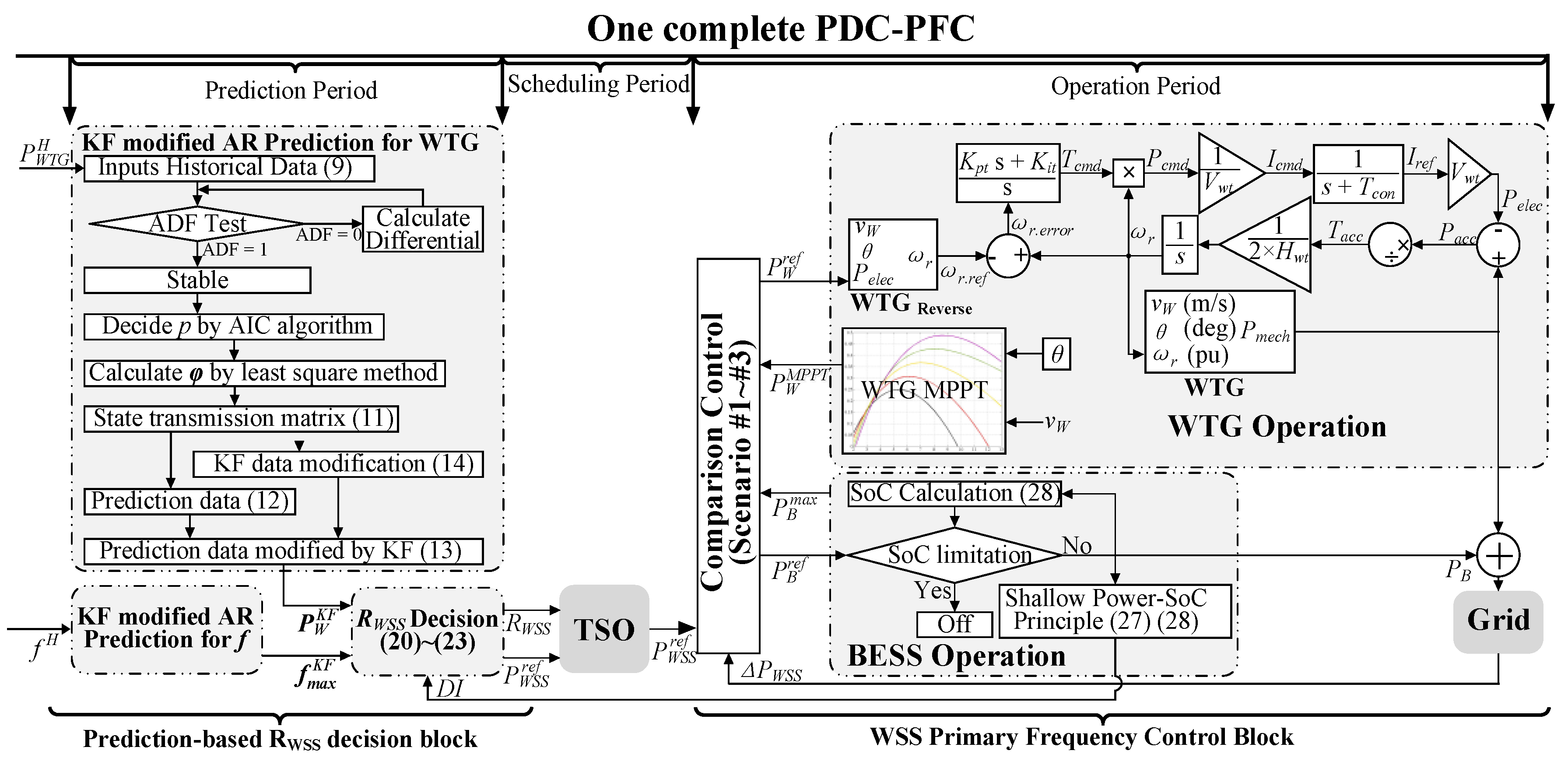
In the existing re-bid process, renewables are still regarded as generators with a lower degree of operation control. In other words, the re-bid process alone does not enable WSS to perform well in the PFC. Therefore, PDC-PFC, as seen in
Figure 2 is proposed in this paper, by which WSS always aim at the preferable
and
in every bidding interval through the re-bid process, and provide corresponding
, which is the sum of supply power (
) and supply reserve power (
).
3. Primary Frequency Control with Prediction-Based Droop Coefficient for WSS
Dramatically different from conventional generators, is set by considering specific cases highly related to wind speed, instead of the inherent characteristics. PDC-PFC is utilized to determine the constant bidding power () and droop coefficient () of WSS for every bidding interval, which enables WSS to follow the market commitment and be more dispatchable.
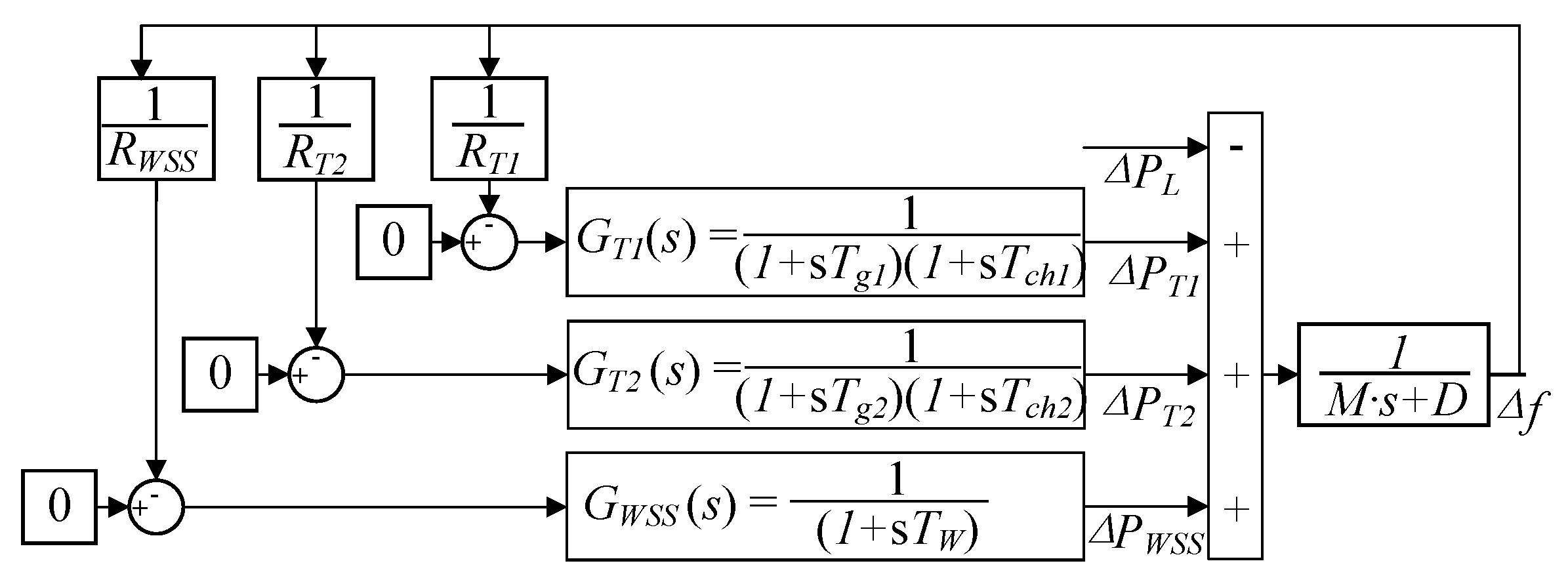
The dynamic model of a typical hybrid power system control area can be summarized as in
Figure 3, in which the same type of generators are equivalent to one [
37] with parameters as in
Appendix A. Specifically, thermal generators contribute system inertia
M with fixed droop coefficient
, and WSS contribute no system inertia with
decided by PDC-PFC. Variables in
s domain have relationships as in Equations (1)–(5), and the transfer function of
and
is shown in Equation (6). Furthermore, the rate of change of the frequency (RoCoF), which is irrelevant to
indicates the slope of the frequency drop at the beginning of the load disturbance as in Equation (7), and
can finally increase the steady state of the frequency value, as in Equation (8). Thus, proper PFC from WSS can mitigate the frequency nadir, after load disturbances.
where,
and
are frequency response from WSS and thermal generators in PFC;
and
are the droop coefficients of WSS and thermal generators;
represents the load disturbance and
is the system frequency deviation;
and
are equivalent system inertia and damping;
and
are transfer functions of WSS and thermal generators;
and
are RoCoF and steady state of the frequency deviation after PFC.
Obviously, smaller is beneficial to the frequency stability, but WSS cannot guarantee enough reserved power in real time. PDC-PFC considers the uncertainty of WTG output, the limitation of the BESS capacity, and always decides the proper for every short-time interval.
Last, the complete PDC-PFC as shown in
Figure 2, contains the “Prediction-based
decision block” and “WSS primary frequency control block”. In detail, the “KF modified auto regressive (KF-AR) prediction” part is used to forecast the WTG output power and the trend in frequency deviation for the coming WSS operation period, and the
decision” part decides the de-loaded level and the re-bid parameters for TSOs in KF modified auto regressive prediction. Meanwhile, in the WSS primary frequency control block, the “WTG operation” part and “BESS operation” part execute the control signals from the “Comparison control part” responding to the frequency regulation and wind speed fluctuations by absorbing and releasing power from the WTG and BESS. Generally, the inputs of PDC-PFC include historical frequency (
), WTG output power (
), real-time wind speed (
) from the WTG, frequency deviations (
), and the output is
, which is the sum of
and
consisting of
and
.
3.1. Prediction-Based Decision Block
The Prediction-based
decision block consists of two parts, the Kalman filter modified auto regressive (KF-AR) prediction part and the
decision part, which operate in sequence. According to the time-scale in
Figure 1, PTI covers the “WSS prediction period”, “TSO scheduling period” and WSS operation period”, and a reasonable PTI is defined as 15 min.
3.1.1. KF-AR Prediction Part
Prediction of WTG output power
is taken as an example to show the process of KF-AR Prediction, which has been fully summarized in
Figure 2. First, historical WTG output power
was collected as training data in Equation (9). The training data of WTG is from real-time recording and local memory without the process of data collection. Meanwhile, a 2~3 min prediction period was reserved for KF-AR prediction, as shown in
Figure 1.
Furthermore, the AR model is a kind of a time-series analysis model that is regarded as a forecasting method for short-time intervals (such as 15 min in this paper). The boundary between AR, ARMA and ARIMA is not rigid, and the AR prediction process may use either of those methods. In detail, the historical values must pass the augmented Dickey–Fuller test (ADF = 1), because only stable data can be applied in the time-series analysis model. If
fails to pass the ADF test (ADF = 0), a differential process is applied. As shown in Equation (10),
p terms of historical data with coefficients
are used. Specifically, the Akaike information criterion (AIC) and least square method are used to calculate
p and
respectively. However, AR prediction is normally with some forecast errors, which are further modified by KF as per Equations (11)–(16). In detail,
p terms of
compose the state transmission matrix
F as in Equation (11), and the forecasted WTG output
is calculated by Equation (12), which is similar to Equation (10). Last,
is further modified to be
by Equation (13) as the output.
where,
is a matrix consisting of recorded WTG output power
for the last prediction time interval;
n represents the quantity of the historical data;
is the state transmission matrix;
is the forecasted value of
without the KF modification;
is the optimal value of WTG output by KF prediction;
is used to link Equations (12) and (13);
is with the measurement values based on forecasted wind speed;
co-variances matrix of forecast error from
to
;
and
are co-variances state estimation at
and
;
is the observation matrix (=1);
represents Kalman gain;
and
are co-variance matrix of process noise and measurement noise, and both values are based on experience.
Similarly, the same prediction process is used for
, which is another important parameter to calculate
. As the frequency data is often recorded every 4 s in current power systems, historical frequency data (
) for the past several minutes is shown as Equation (18). Meanwhile, as PFC of WSS focuses more on the under-frequency situation, the maximum under frequency excursion (
) in every minute is chosen as per Equation (19). Finally, KF-AR prediction is applied to obtain
for PTI.
where,
is a matrix including 15 min frequency value, and each row represents a one-minute time interval;
is a function used to calculate the minimum frequency values.
3.1.2. Decision Part
is determined by and in the decision part. Referring to conventional generators, the aim of WSS is 5% of supply power as a supply reserve power for PFC. However, the randomness of wind speed, is not a constant value. Thus, based on human understanding, when the fluctuation of the WTG output power is high, WSS should bid a smaller supply power with more reserved power for WSS in PFC and vice versa.
In detail, the standard deviation of
indicates the fluctuation of WTG output, and the corresponding
is calculated in Equation (20), which is further used to calculate proper
as per Equation (21). Last,
is obtained in Equation (22), and the state of the BESS is also involved. In this way,
and
keep updating every bidding interval, which enables WSS to be dispatched and to follow their commitment in PFC more easily.
where,
is the de-loaded level of WTG,
is the coefficient which shows the influences of WTG output power fluctuations on
;
is the proposed re-bid power of WSS;
is the reciprocal value of the droop coefficient;
is the principle of ”shallow cycle operation profile” of batteries;
is its threshold;
shows the proportion of the moments that BESS operates on shallow cycle operation profile mode. Additionally,
and
are functions to calculate the standard deviation and the average values;
is a counter. Positively,
keeps constant within every WSS operation period in
Figure 1. From the perspective of TSOs, WSS can be dispatched similar to a conventional generator in that particular period. Also, by considering the characteristics of WTG,
varies every prediction time interval to remain optimized. Thus, WSS can always be regarded as conventional generators by PDC-PFC, and easier to dispatch.
In conclusion, the prediction-based decision block decides and of WSS for the next operation period through two processes. In particular, KF is applied to improve the accuracy of the prediction. Also, is a convincing value, because of the consideration of the states of WTG, BESS and system frequency deviations.
3.2. WSS Primary Frequency Control Block
Once
and
is confirmed by the TSO, the WSS Primary Frequency Control Block is applied to make sure the WSS ensures the reference power
and respond to frequency deviation
by adjusting the output of WTG (
) and BESS (
). The complete WSS Primary Frequency Control Block is comprised of the “WTG operation” part, “BESS operation” part and “Comparison control” part, as already shown in
Figure 2.
3.2.1. Comparison Control
Comparison control is the connection between the KF-based
decision block and the WSS primary frequency control block. As shown in
Figure 2, the demand signals (
and
) from the grid and available power (
and
) are compared to decide the
and
signals.
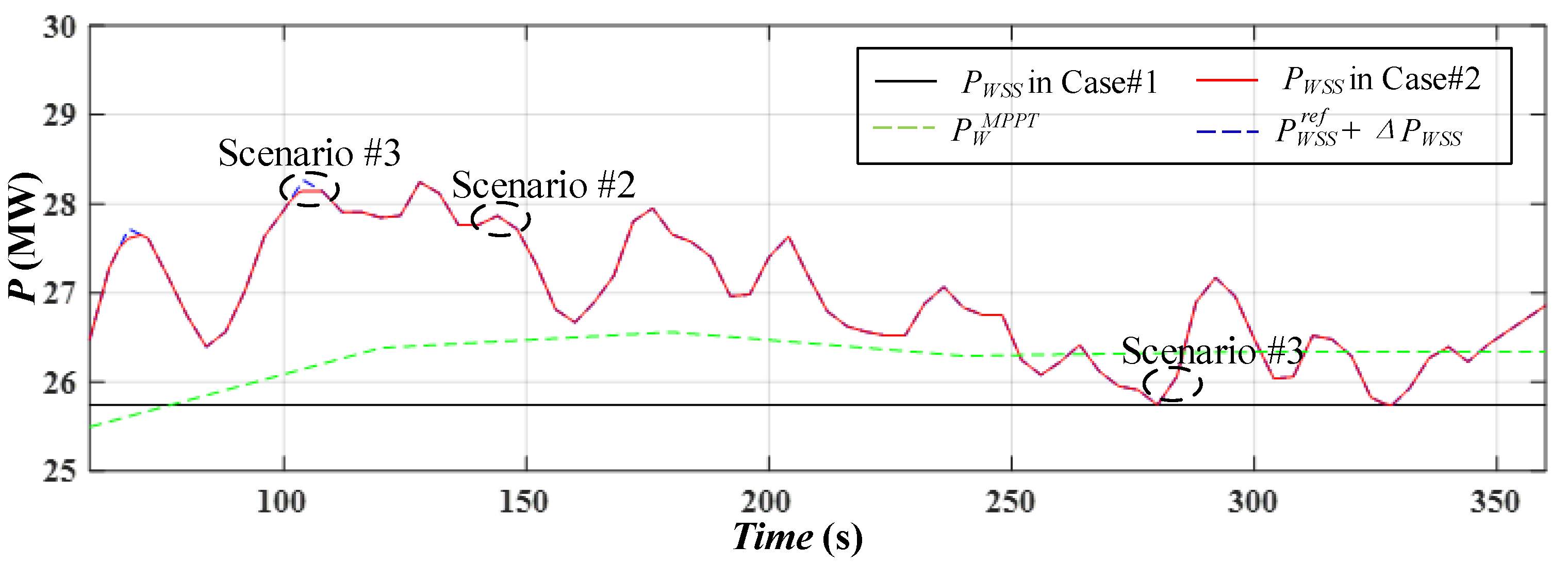
Taking the under-frequency situation as an example, three scenarios may happen in real-time operation. Details of the WTG and BESS energy management are shown in (24)–(26).
Scenario #1: WTG with its reserved power supply the demand, if
.
Scenario #2: WTG with its reserved power and BESS supply the demand, if
.
Scenario #3: WTG with its reserved power and BESS supply all their power, but cannot meet the demand, if
. The chance of
Scenario #3 is extremely low in the proposed PDC-PFC, because of the dynamic
and
.
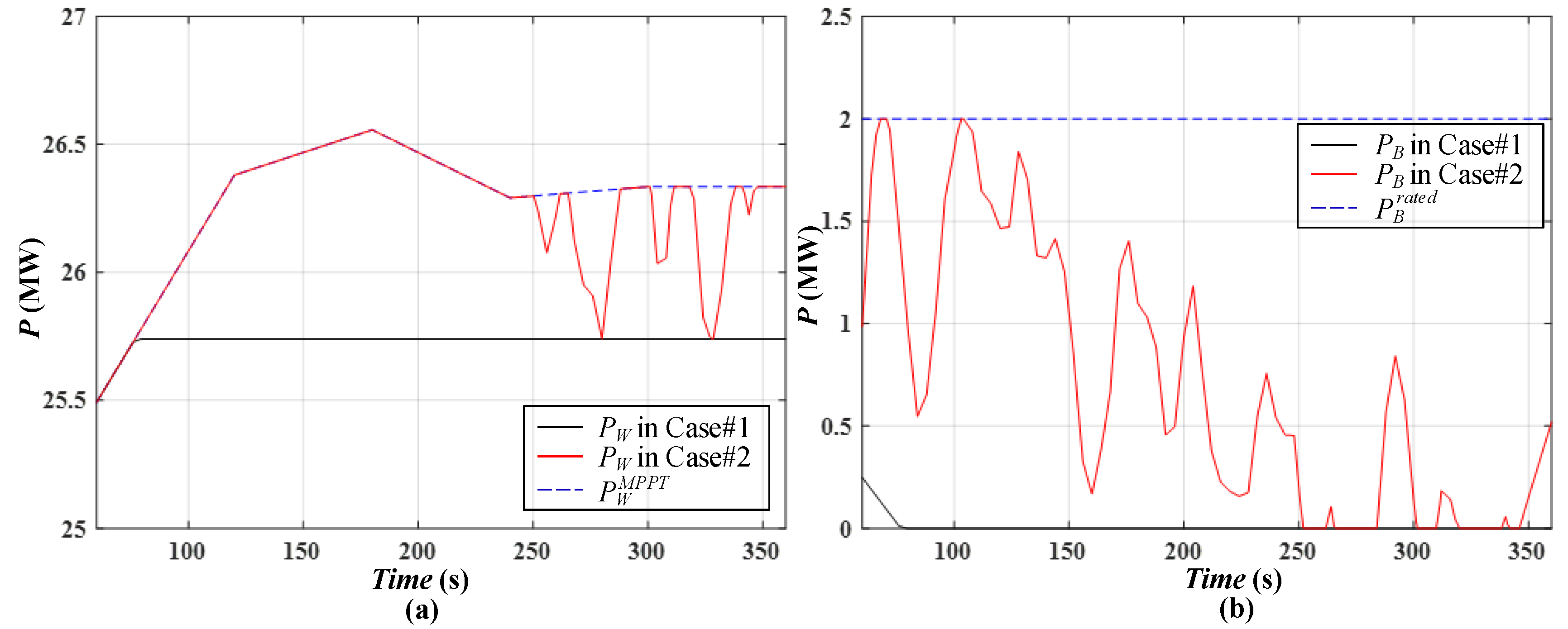
3.2.2. WTG Operation
MPPT is the basics of WTG operation, and the maximum output power of WTG is directly related to wind speed (
). Moreover, DFIG as the dominant type of WTG, can operate on de-loaded mode, in which rotor speed can be accelerated up to 130% [
1] to make WTG output power less than the maximum power point. Thus, WTG operation aims to achieve
by releasing and absorbing power in a typical range, when the fluctuations of wind speed and frequency deviations happen. Particularly, the de-load level of WTG varied in real time, according to the predicted weather conditions and frequency performance in Equation (20), as a fixed de-load level results in either energy spilled or shortage. In addition, the dynamic model of WTG, including MPPT and de-loaded operation are shown in
Figure 2, and the values of the parameters are listed in
Appendix A. More details of the de-loaded operation block can be referred to in [
21].
3.2.3. BESS Operation
Because of the randomness of wind speed, BESS are compulsory for dealing with unexpected issues to fulfil the bid commitment. As long as state of charge (SoC) of BESS is within the typical range, such as [0.2, 0.8], BESS respond to . Otherwise, BESS are switched off.
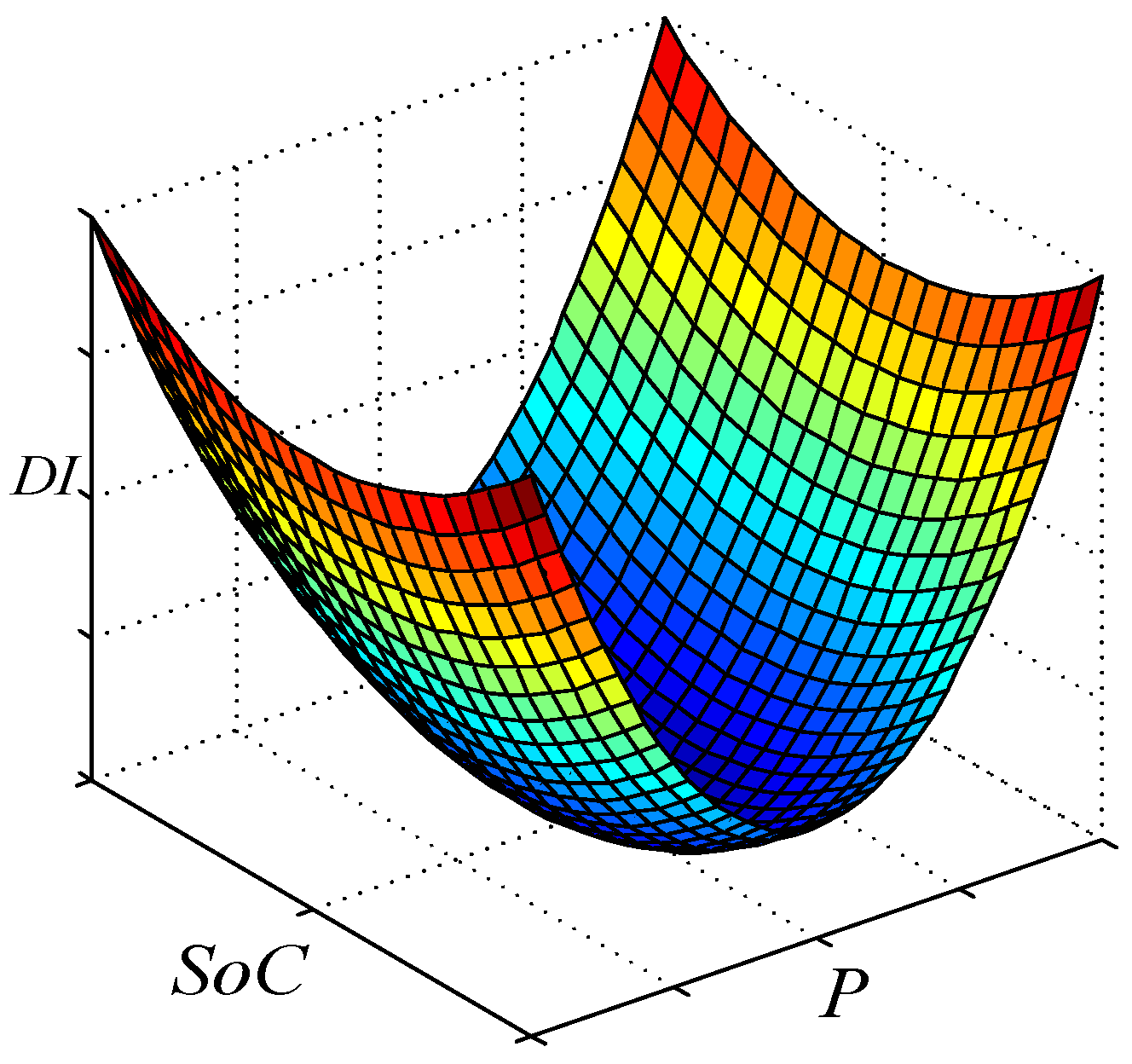
To extend BESS operation life and to avoid the occurrence of
Scenario #3, the principle of shallow cycle operation profile for BESS is proposed in the BESS operation. The shallow cycle operation profile index is expressed in Equation (27), and SoC can be further expressed as a function of
and
in Equation (28).
where
is the shallow cycle operation profile index at moment
t;
and
are the charging and discharging power of BESS, and either
and
equals 0 at every
t moment;
is the state of charge of BESS at
t moment;
is the reference value;
and
are the charging and discharging efficiency of BESS, respectively.
Figure 4 is a more intuitive way to show the principle of shallow cycle operation profile. The light colored area represents the moment BESS belongs to the shallow cycle operation profile mode, and the warm colored area represents the opposite mode. The proportion of the moments of
in the light colored area of all
in the operation period affects the
in Equation
, which avoids the overuse of BESS.
In conclusion, PDC-PFC is achieved by the combination of KF-AR prediction and decision. In this way, WSS can perform very similarly to conventional generators in PFC. Specifically, and are carefully chosen in every bidding interval, and the power from WTG and BESS is well organized.
5. Conclusions
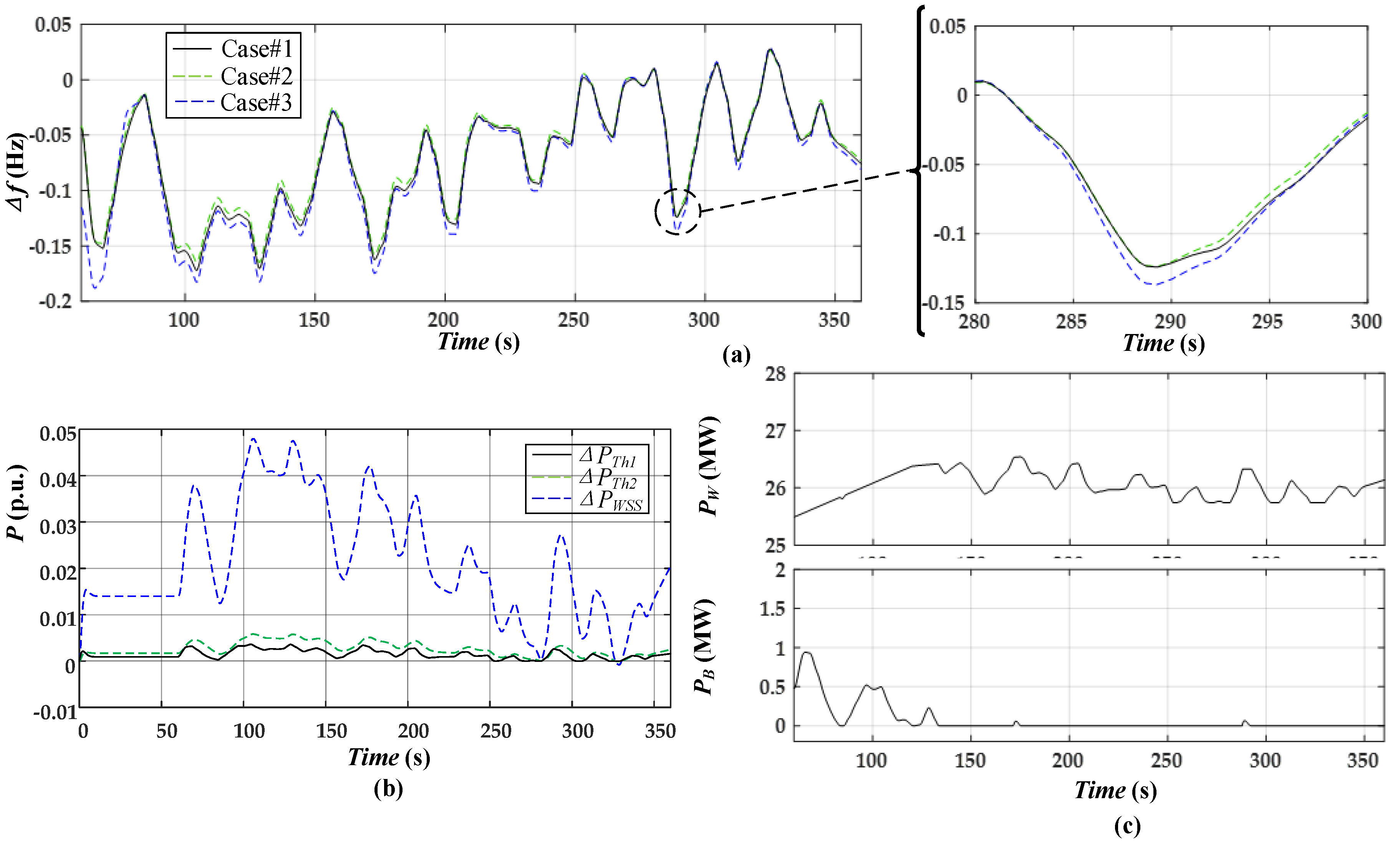
If future power systems with high levels of renewables are to maintain acceptable levels of frequency response, all new and existing generators should be asked to contribute to the system frequency response. The participation of WTG in frequency response, especially in under-frequency situations is very necessary to ensure system stability. In this paper, PDC-PFC ensures that the performance of WSS is similar to conventional generators in a short time frame, which makes WSS more dispatchable from the perspective of TSOs.
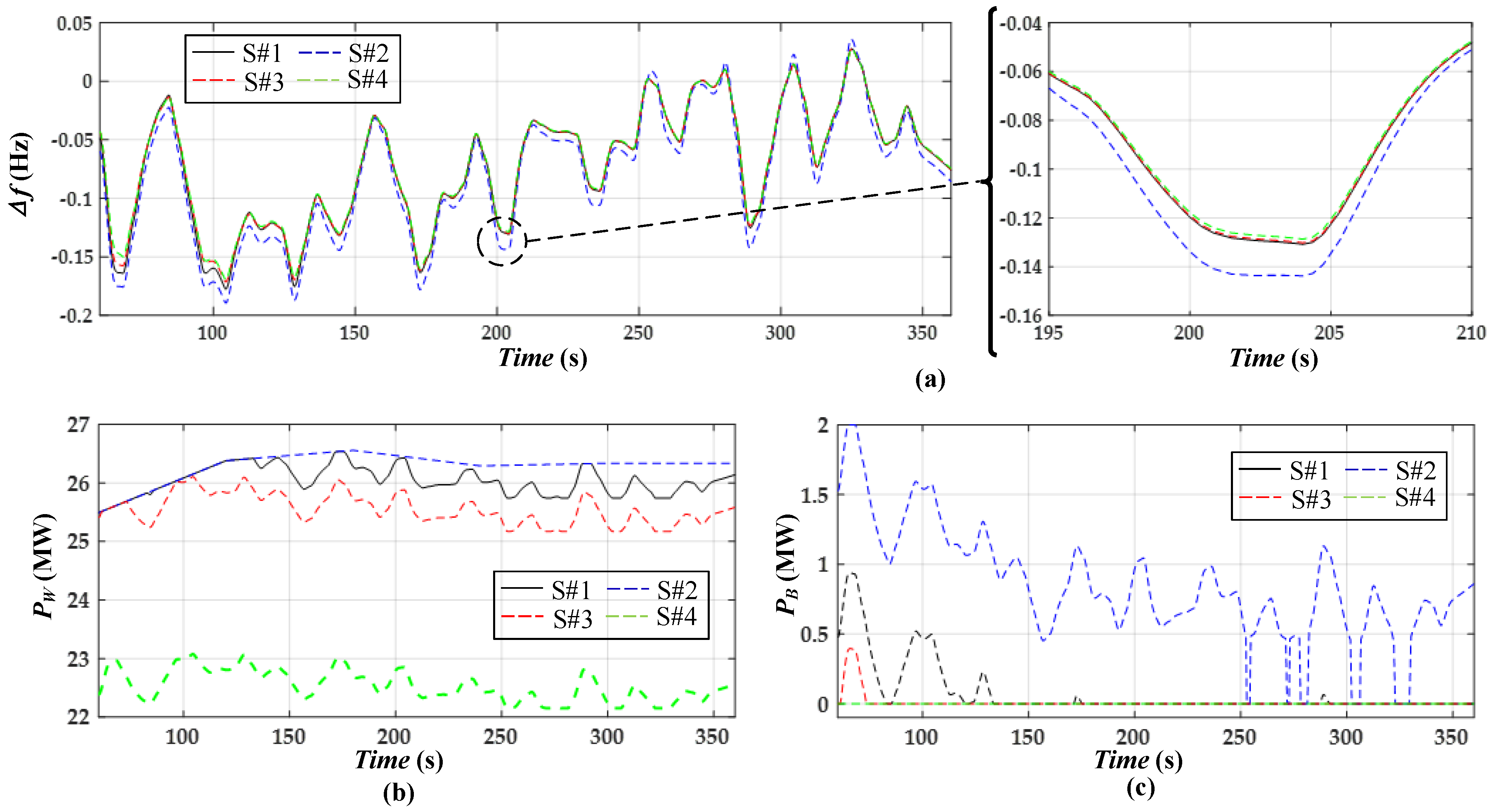
Here, two innovations were considered in PDC-PFC. On the one hand, the spot market rule has been fully considered in PDC-PFC, and thus, from the perspective of TSOs, WSS can be regarded as conventional generators and are easier to dispatch. In detail, WSS joins the re-bid process of the spot market with constant and by the prediction-based decision block. Meanwhile, as and varies every re-bid interval according to real-time wind speed fluctuations and load deviations, WSS can always operate on the optimal operational conditions.
On the other hand, an accurate and proper method, KF-AR was used to improve the wind power prediction. Although AR reflects less characteristics of WTG historical data than ANN, the involvement of BESS can overcome that drawback. Moreover, AR has stable performance for the short-term prediction without the aid of experience, and KF further improves the prediction accuracy level.
In summary, with the application of AR-KF in PDC-PFC, WSS can satisfy the system frequency requirement, avoiding wind energy spillage and the excessive use of BESS in the current spot market rules. The simulation results show that WSS can guarantee smooth output power and the frequency response in every PTI under the control of PDC-PFC.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








