1. Introduction
In recent decades, building occupants’ demands for thermal comfort are increasing and hence, the number of HVAC systems has increased correspondingly. Due to the fact these devices account for almost 50% of the total energy usage in buildings [
1], improvement of the applied control techniques could be a more efficient way of preventing energy losses by these devices and maintaining thermal comfort at the same time. The HVAC system and specifically the air conditioning system are nonlinear, and complex and in reality are MIMO devices with coupled parameters [
2].
Regarding the significant concern of control engineers, which is how to mimic the real condition as closely as possible with the intention of designing systems to be as much as possible applicable, designing advanced control techniques with regards to the features of the system is needed. The features of the HVAC systems are MIMO, time-varying, nonlinear, complex models and coupling effects between parameters [
3,
4,
5]. From the other point of view, the major problems of HVAC systems are variation in system parameters, variable conditions, and interactions between climatic parameters, intense nonlinear factors and uncertainty in the model. Consequently, the systems present significant nonlinear behavior and time-varying characteristics, so linear control techniques cannot offer appropriate performance and stability level solutions, particularly over the wide operating range and when the system’s nonlinearity has a special influence on the system behavior, making the need for nonlinear control essential.
As Afram and Janabi-Sharifi [
3] reported, the control law in nonlinear controller design could be derived by using feedback linearization, adaptive control techniques and Lyapunov’s stability theory. In general, more techniques are used like input to state linearization, compensation of static nonlinearities, input to output linearization, sliding mode, relay control, neural network and fuzzy control. The control law is used to drive the nonlinear system toward a stable state while meeting the control objectives. Although the nonlinear control techniques are successful in some nonlinear cases, they need the complex mathematical analysis and identification of stable states for controller design. For instance, the robustness is difficult to guarantee in the case of HVAC systems due to the varying conditions in buildings. Some of the control methods like nonlinear control methods, need the specification of additional parameters, and integration of these additional parameters with HVAC system could be difficult and sometimes impractical, like observers for estimating the thermal and moisture loads. As well, some control methods like nonlinear control do not consider the various constraints on states and controls to reflect the real conditions [
6]. In other words, some factors limit the usage of nonlinear control for HVAC systems.
Furthermore, most of the practical systems are MIMO systems in nature [
7]. With the purpose of making the system simpler by decoupling the system, the system is considered as a Single-Input and Single-Output (SISO) system. With regards to a SISO system with the aim of controller design [
1], the performance of transient control of decoupled feedback loops is naturally reduced. As the coupled parameters are affecting each other, artificially decoupling of them would result the reduced and imperfect control performance. On the other hand, the previous MIMO controllers [
2] are based on the system’s linearized models in the neighborhood of the system’s operating point. This means, the system is designed to work around the designed specific operating point and is stable around this designed operating point of the system. Accordingly, the controller is not practical for wide range of operating. As a result, the aim of this review is investigation of the different control methods applied to HVAC systems. The benefits and shortcomings of these control methods are investigated as well.
3. Introduction and Description of Fuzzy Cognitive Map (FCM)
Technology development causes more complexity and the nonlinearity behavior of the systems which increases the need for new methods to analyze the behavior of complex dynamical systems [
92]. The Fuzzy Cognitive Map method has been applied in many different areas like sociology, economy or virtual reality simulation as an alternative to expert systems [
93] or knowledge-based expert systems in order to analyze complex systems [
94]. The FCM method was used for the first time to model the causal relationship among concepts in 1986 by Kosko [
94,
95]. Actually, the cognitive maps method was extended by Kosko [
96]. The cognitive maps method was first introduced by Axelord [
97], the political scientist, in order to describe the methods for decision making in political and social sciences, by replacing the fuzzy values instead of real values of concepts [
98,
99,
100]. Based on required control scenario, the FCM illustrates fuzzy-graph structures by nodes. The nodes are described as concepts to show causal reasoning [
94,
96]. Each concept shows the conditions and characteristics of the system [
101]. In other words, characteristics or conditions of the system are represented by concepts [
101]. In fact, the FCM method is a combination of the neural network and fuzzy system methods which benefits from the robust characteristics of both methods [
95,
98,
101].
As the structure of the FCM method is derived from the system’s goals, tendencies, events, values and actions [
98], it can be used to design a MIMO nonlinear controller by considering the parameter coupling effects. By choosing the correct concepts and initial weights values between the concepts of the system, an effective controller could easily be designed for HVAC systems. By this method the artificial decoupling of the coupled parameters of the system would simply be removed. As a result, the sensitivity and accuracy of the control method can be improved. Correspondingly, the FCM control method could apply to the nonlinear dynamic model of the system in order to make the conditions very similar to reality.
Thus, the control signal should be applied to the nonlinear dynamic model of the system. Since the DX A/C system is inherently complex and has model uncertainty, the design of a nonlinear controller by using Lyapunov’s stability theory, feedback linearization and adaptive control techniques to extract the control law is difficult. Due to the complex mathematical analysis and identification of the steady state, the control process involves complex mathematics and difficulty in finding a Lyapunov function. Hence, a simple algorithm with simple mathematics is required for nonlinear control of the system.
The purpose of this paper is introducing a FCM method as a simple solution for designing a single control scenario with simple mathematics and algorithm for the MIMO, nonlinear and coupled properties of HVAC systems.
According to the structure of the FCM, designing a single control scenario by considering the properties of the system should be possible. In a control scenario the inputs and outputs of the system with other effective parameters in the process like actuators could be considered as concepts. It means the MIMO characteristic are considered. The nodes are connected to each other based on their relationship or effect on each other. This means that the coupling effects could be considered. The algorithm and mathematics of the FCM are simple. Finally, the control signals are applied to the nonlinear dynamic model of the system. As a result, a nonlinear MIMO controller with simple mathematics and algorithm by considering the coupling effect could be designed based on the soft computing method of FCM.
5. Improvements in Terms of Performance as Compared to the Current Technology or Works
The pure FCM method was applied on a typical HVAC system by Behrooz et al. [
102]. Four FCM controllers were designed based on the FCM method separately for controlling the temperature and humidity of the zone or room by heating and humidifying for the winter season and cooling and dehumidifying for the summer season. The typical model of the HVAC system in this work was adopted from Tashtoush et al. [
12]. The results of the designed FCM control method were compared on the same HVAC model with a PID controller designed by Tashtoush et al. [
12].
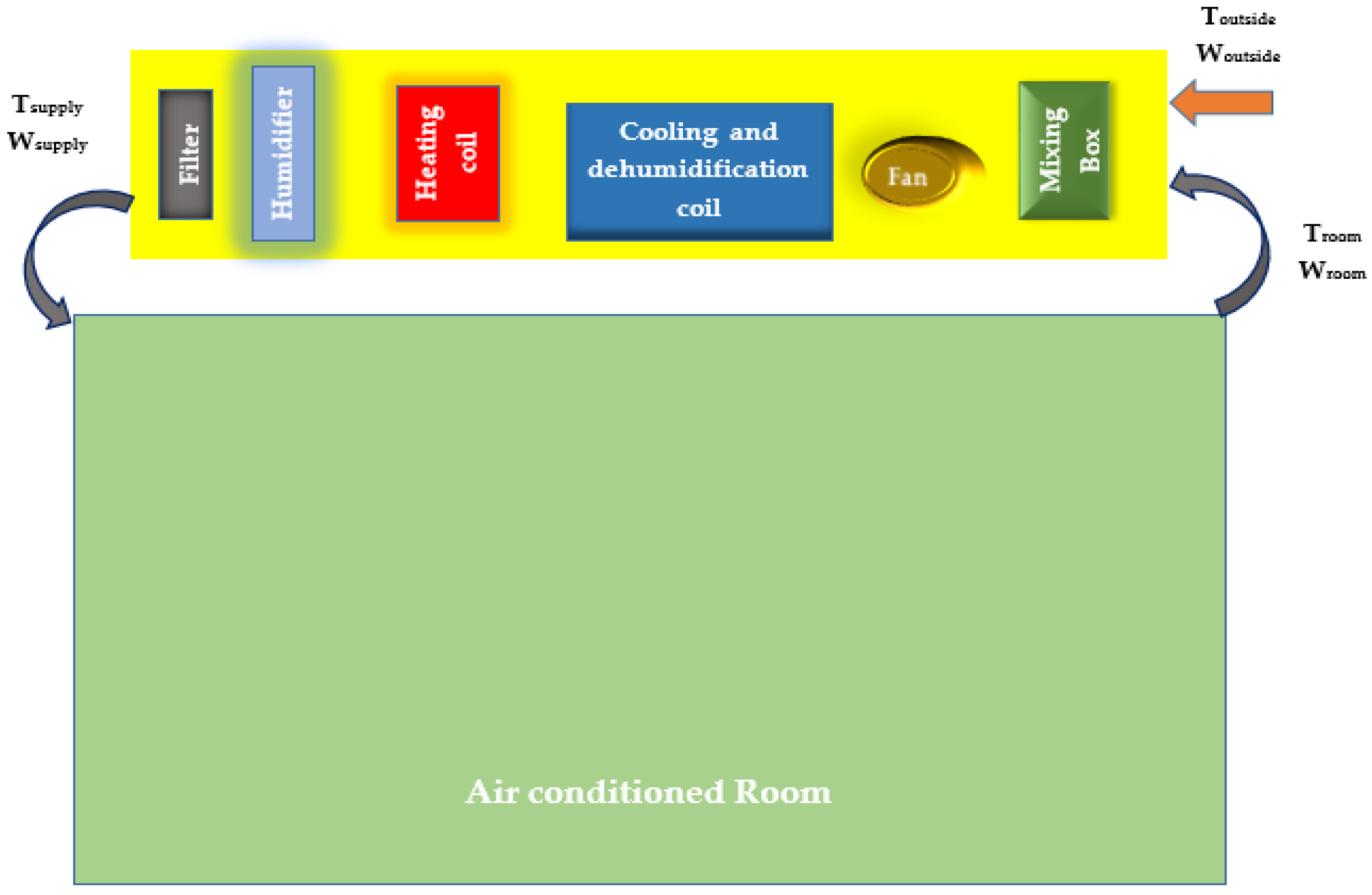
Figure 6 shows the schematic diagram of the typical HVAC system.
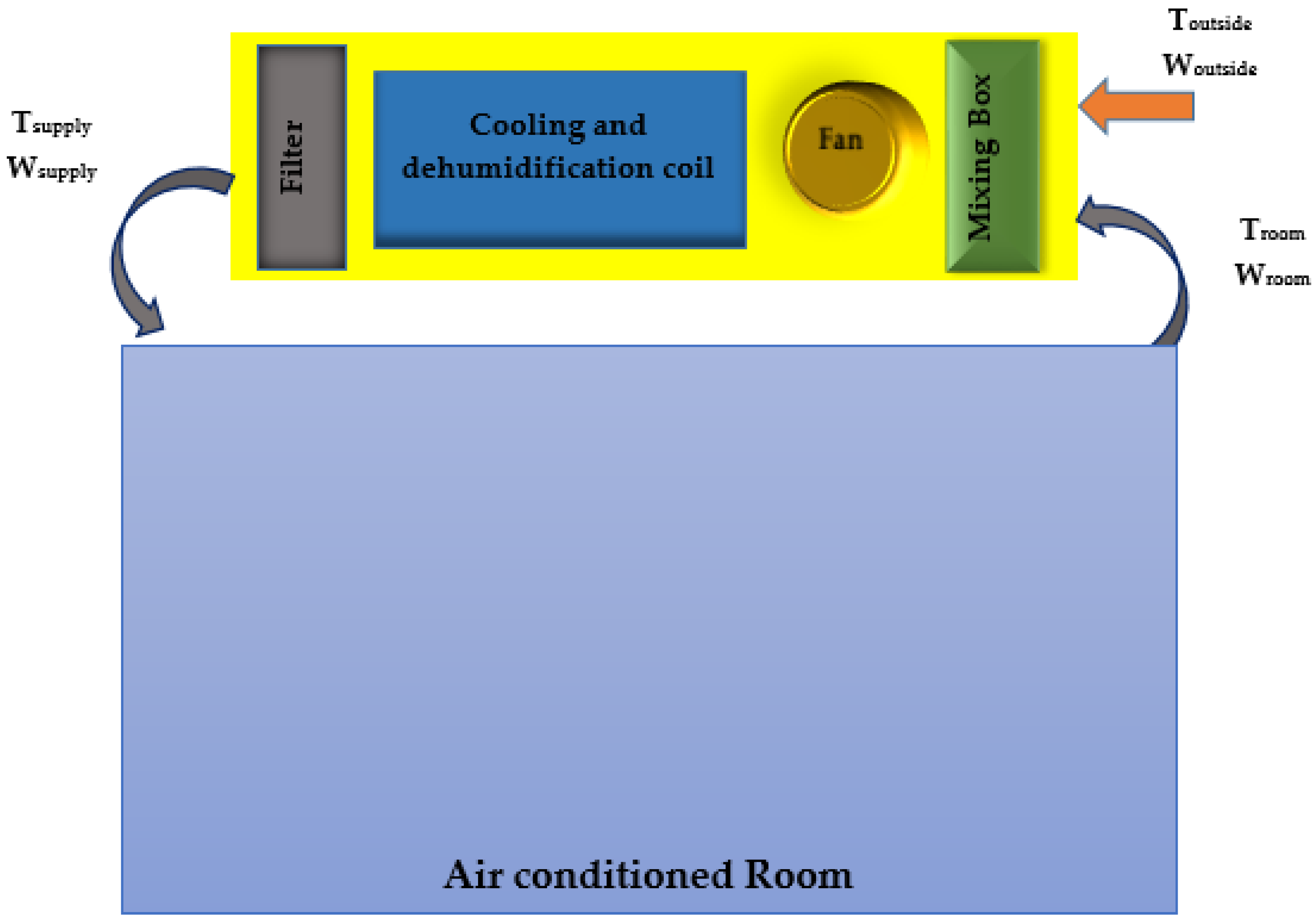
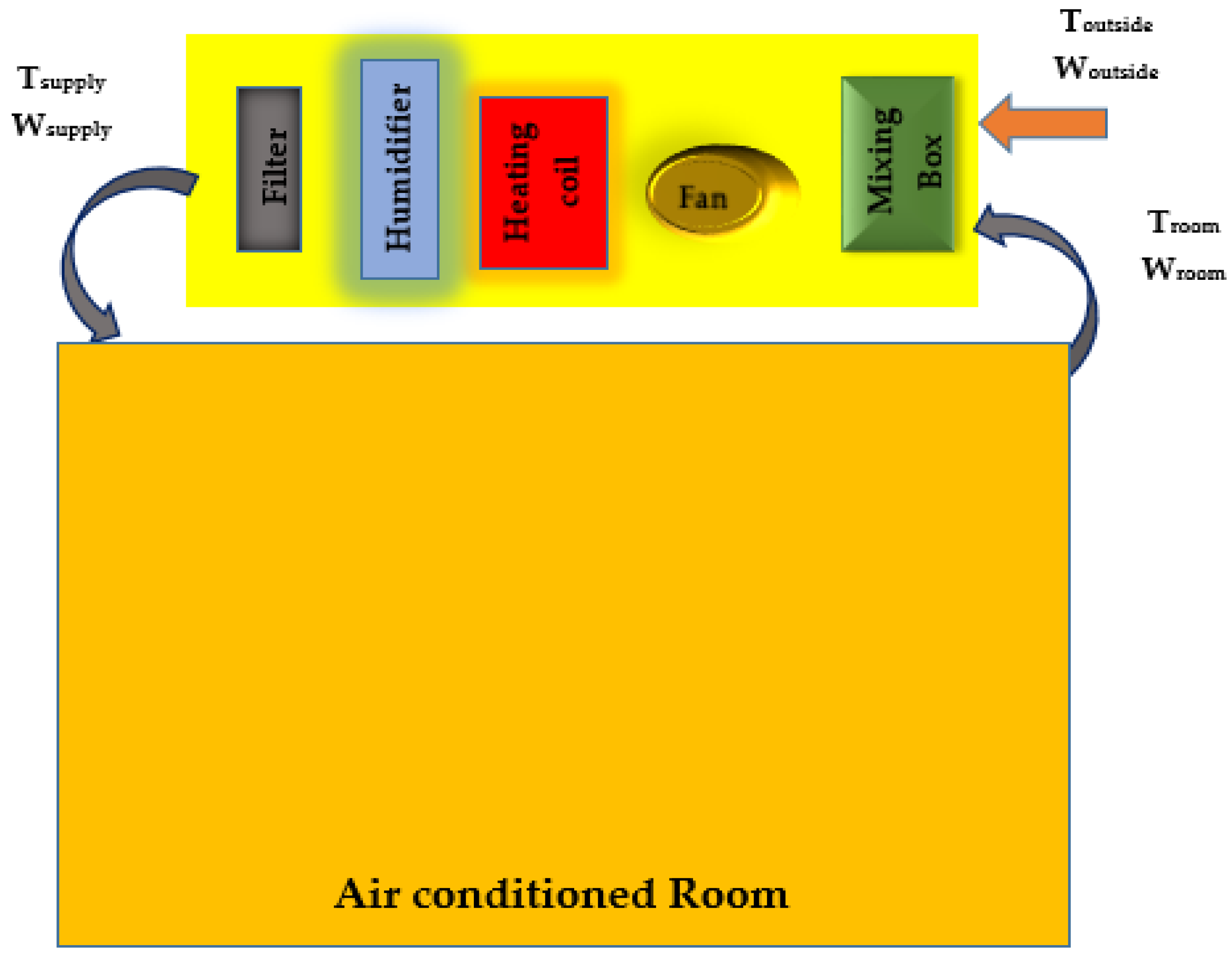
Figure 7 indicates the schematic diagram of the cooling system in summer operation season. The heating system in winter operation season is illustrated in
Figure 8.
For the cooling model in the summer operation season, the FCM controller was designed by two concepts such as the temperature of the zone and the temperature of the water in the cooling coil. Also, for the dehumidifying model, the FCM controller was designed based on two concepts such as the humidity ratio of the zone and temperature of water in the dehumidifying coil. For the heating model in the winter operation season, the FCM controller was designed based on three concepts such as temperature of the zone, temperature of the water supplied to the heating coil, and temperature exiting the duct. Also, for the humidifier model, the FCM controller was designed based on three concepts: the humidity ratio of the zone, humidity ratio of the supply air to the humidifier in, and humidity ratio out from the humidifier. In order to optimize the FCM weights the δ learning method was used as a sort of supervised learning.
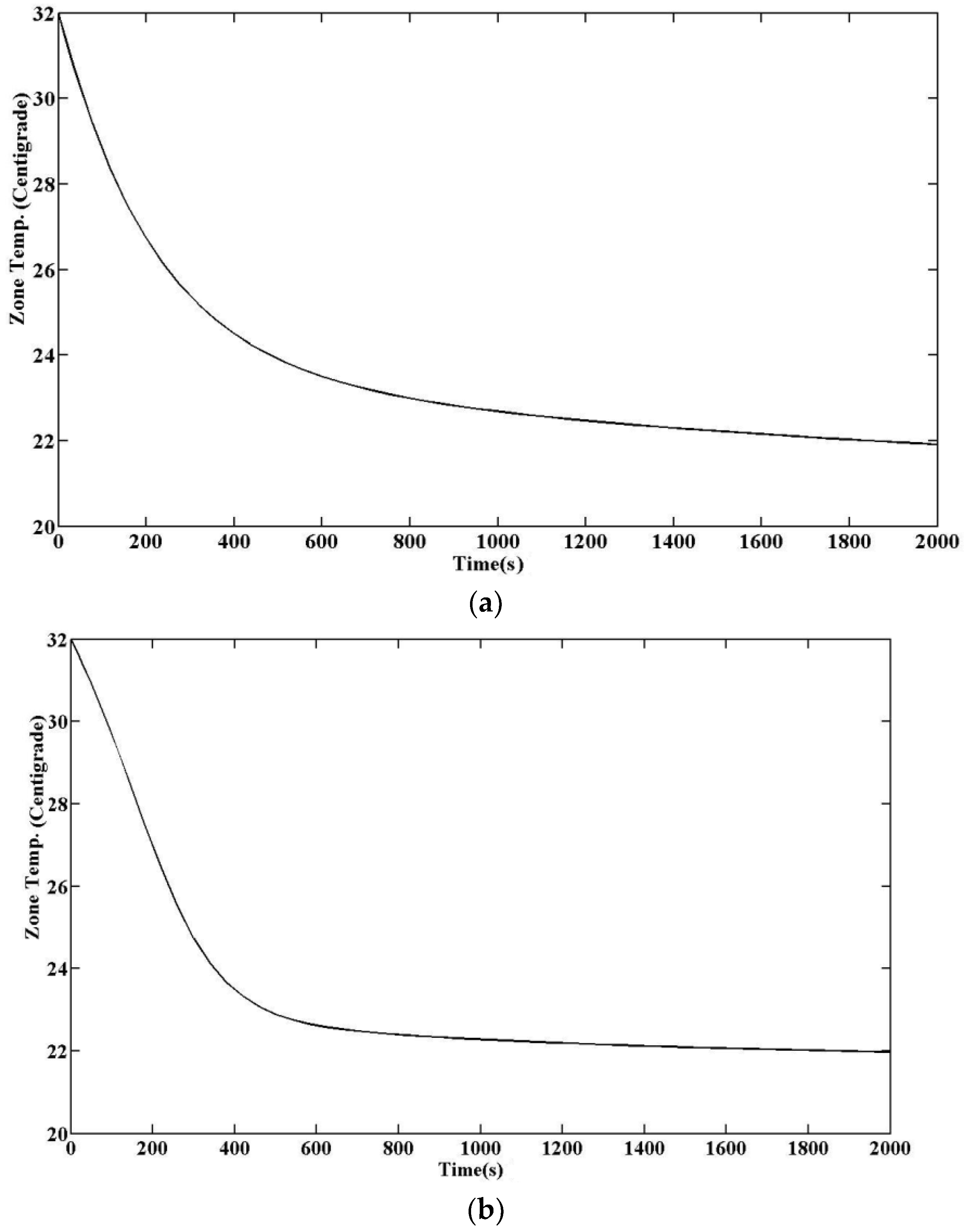
Figure 9a shows the zone air temperature set by the mentioned FCM controller during the summer operation season. The air temperature declines smoothly to reach 22 °C, which is the set point value, in about 1200 s or 20 min with a small error around 0.62% of steady state value.
Figure 9b shows the zone air temperature which is controlled by a PID controller in the summer operation season. The air temperature decreases slowly to reach the 22 °C set point value in approximately 1700 s or 28.3 min with a small error of around 1.2%.
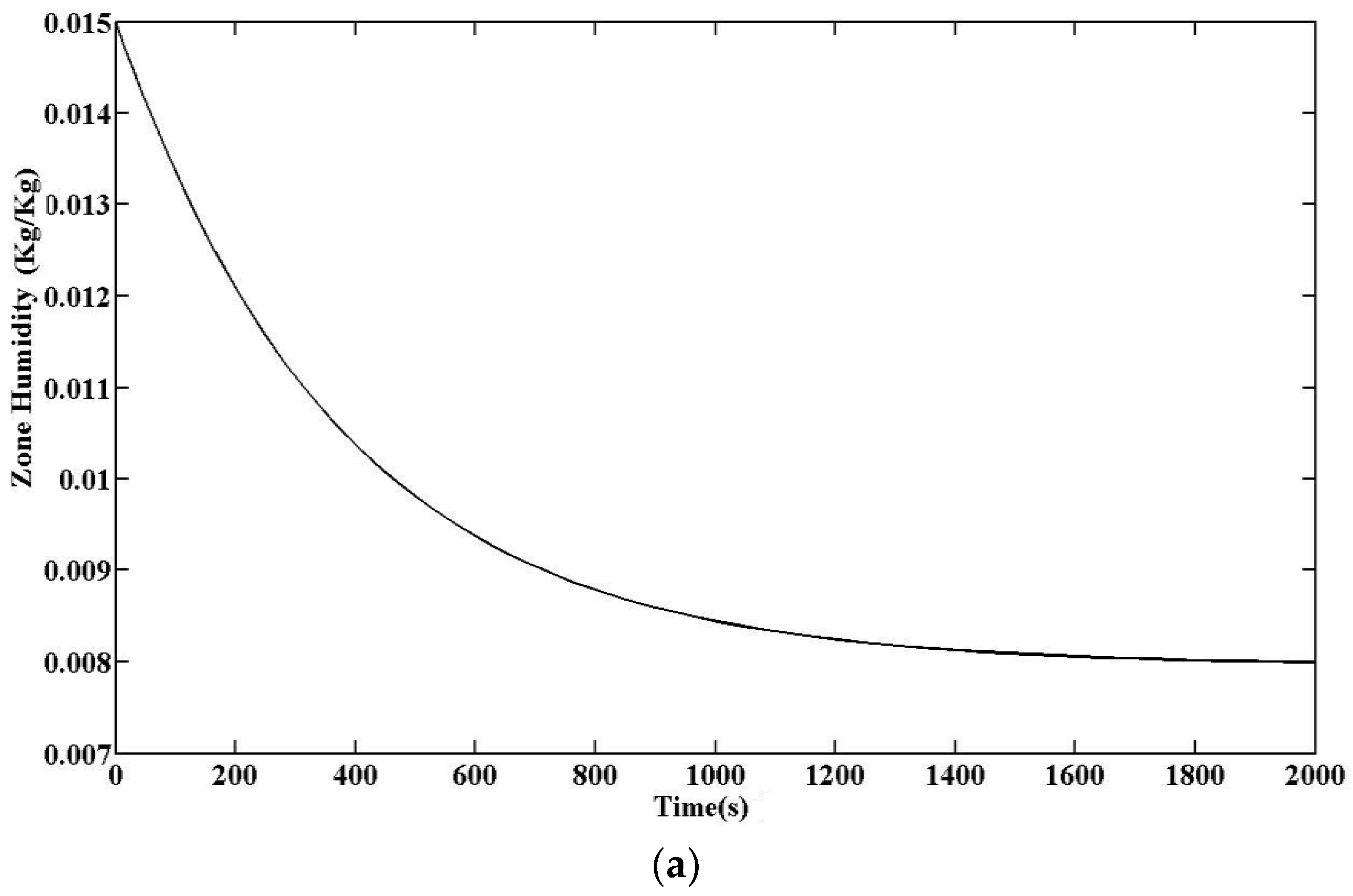
Figure 10a illustrates the humidity ratio of the zone by FCM controller in the summer operation season. The humidity ratio of the zone decreases smoothly to reach the 0.008 kg/kg value which is the set point value in approximately 1000 s or 16.6 min with 3.3% steady state error.
Figure 10b illustrates the humidity ratio of the zone which is under control of a PID controller during the summer operation season. It is obvious from the figure that the humidity ratio of the zone declines smoothly to reach the 0.008 kg/kg value which is set point value in approximately 1000 s or 16.6 min with around 2.5% steady state error.
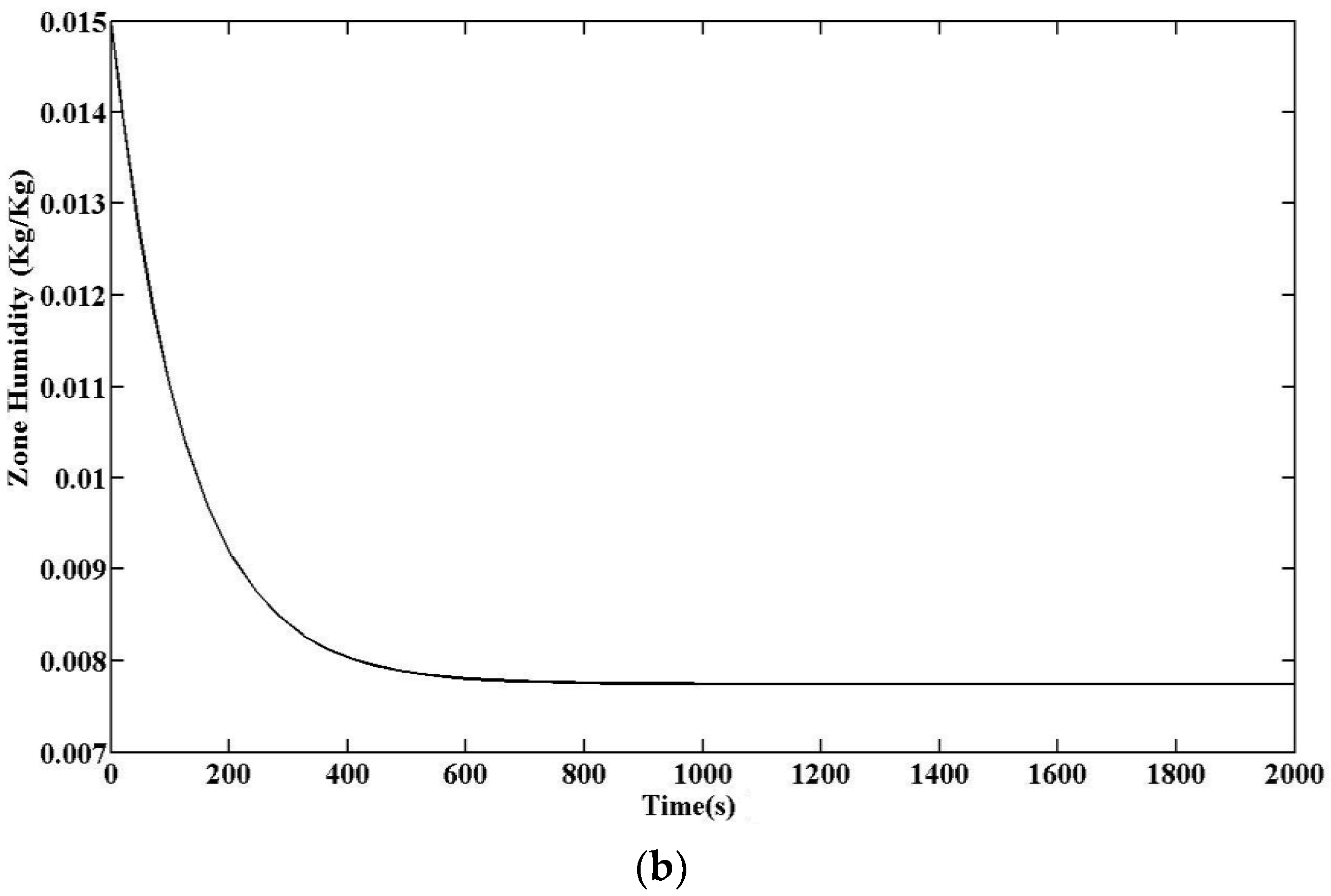
Figure 11a demonstrates the air temperature supplied by the FCM controller in the summer operation season. The supplied air temperature decreases smoothly and stabilizes at 16.4 °C in approximately 1000 s or 16.6 min with 0.9% steady state error.
Figure 11b demonstrates the air temperature supplied by the PID controller during the summer operation season. The supplied air temperature decreases from 25.5 °C to 16 °C at the beginning until 350 s or 5.8 min and then increases to 17 °C around 1600 s or 26.6 min with 0.7% steady state error.
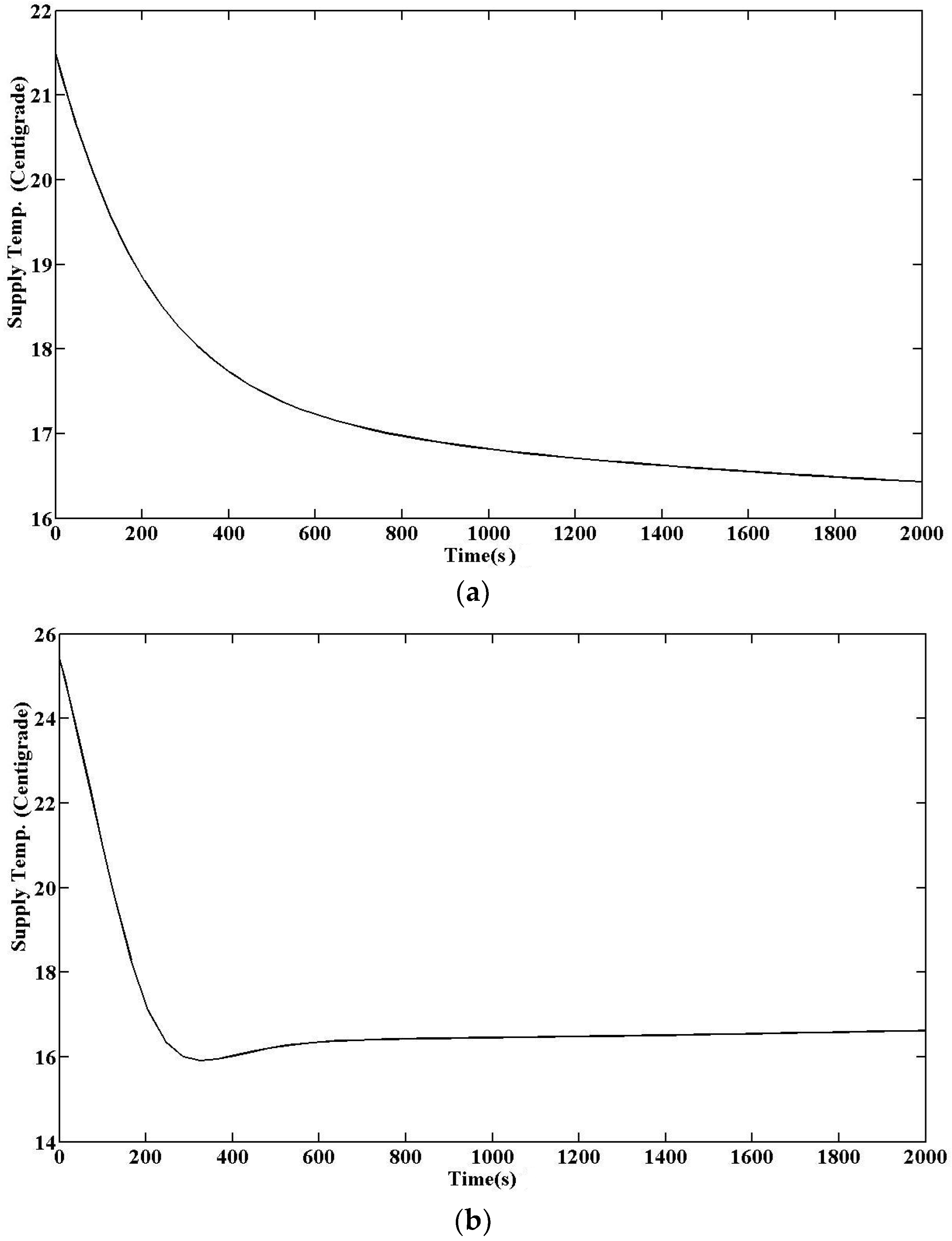
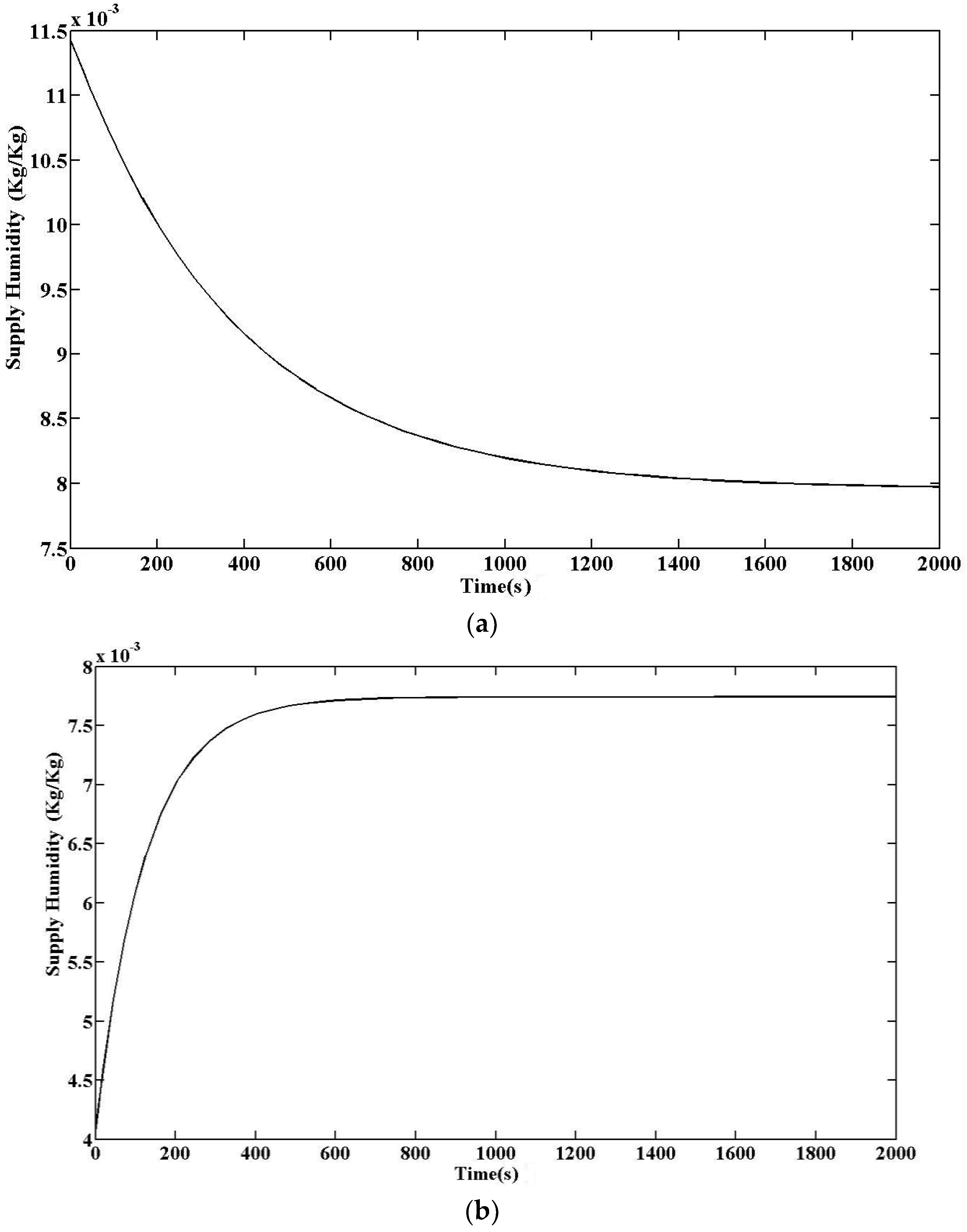
Figure 12a shows the humidity ratio of the zone supplied by the FCM controller during the summer operation season. It is obvious that the humidity ratio of the zone declines slowly from 0.0115 to 0.008 kg/kg and stabilizes in about approximately 950 s or 15.8 min with 2.6% steady state error.
Figure 12b illustrates the humidity ratio supplied by the PID controller during the summer operation season. It is obvious that the humidity ratio of the zone rises smoothly from 0.0044 kg/kg to 0.0078 kg/kg and stabilizes at 0.0078 kg/kg in about approximately 1200 s or 20 min with no steady state error.
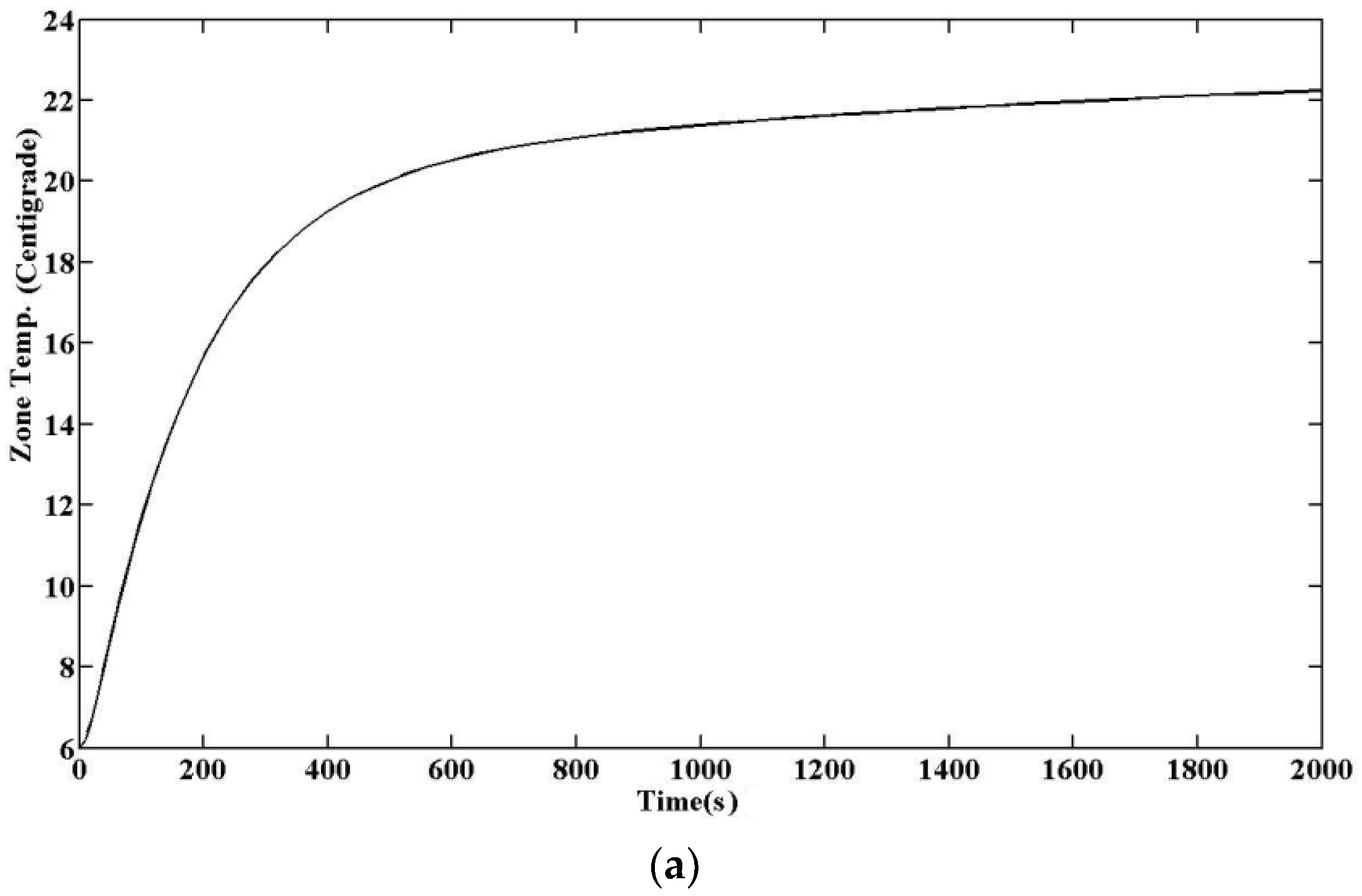
Figure 13a shows the zone air temperature provided by the discussed FCM controller during the winter operation season. The air temperature increases smoothly in approximately 1000 s or 16.6 min to reach 22 °C, which is the set point value, with a small error of around 0.83%.
Figure 13b illustrates the zone air temperature produced by the PID controller in the winter operation season. The air temperature increases slowly in approximately 1200 s or 20 min to reach 22 °C, which is the desired temperature value, with a small error of around 0.2%.
Figure 14a demonstrates the humidity ratio of the zone by FCM controller in winter operation season. It is clear from the figure that the humidity ratio of the zone increases from 0.0039 to 0.0081 kg/kg and stabilizes in approximately 700 s or 11.6 min with small error around 1% in steady state value.
Figure 14b demonstrates the humidity ratio of the zone by PID controller in winter operation season. It is clear that the humidity ratio of the zone increases to 0.0085 kg/kg then decreases until stabilizes to obtain to the 0.008 kg/kg which is desired set point value in approximately 1000 s or 16.6 min without almost any error.
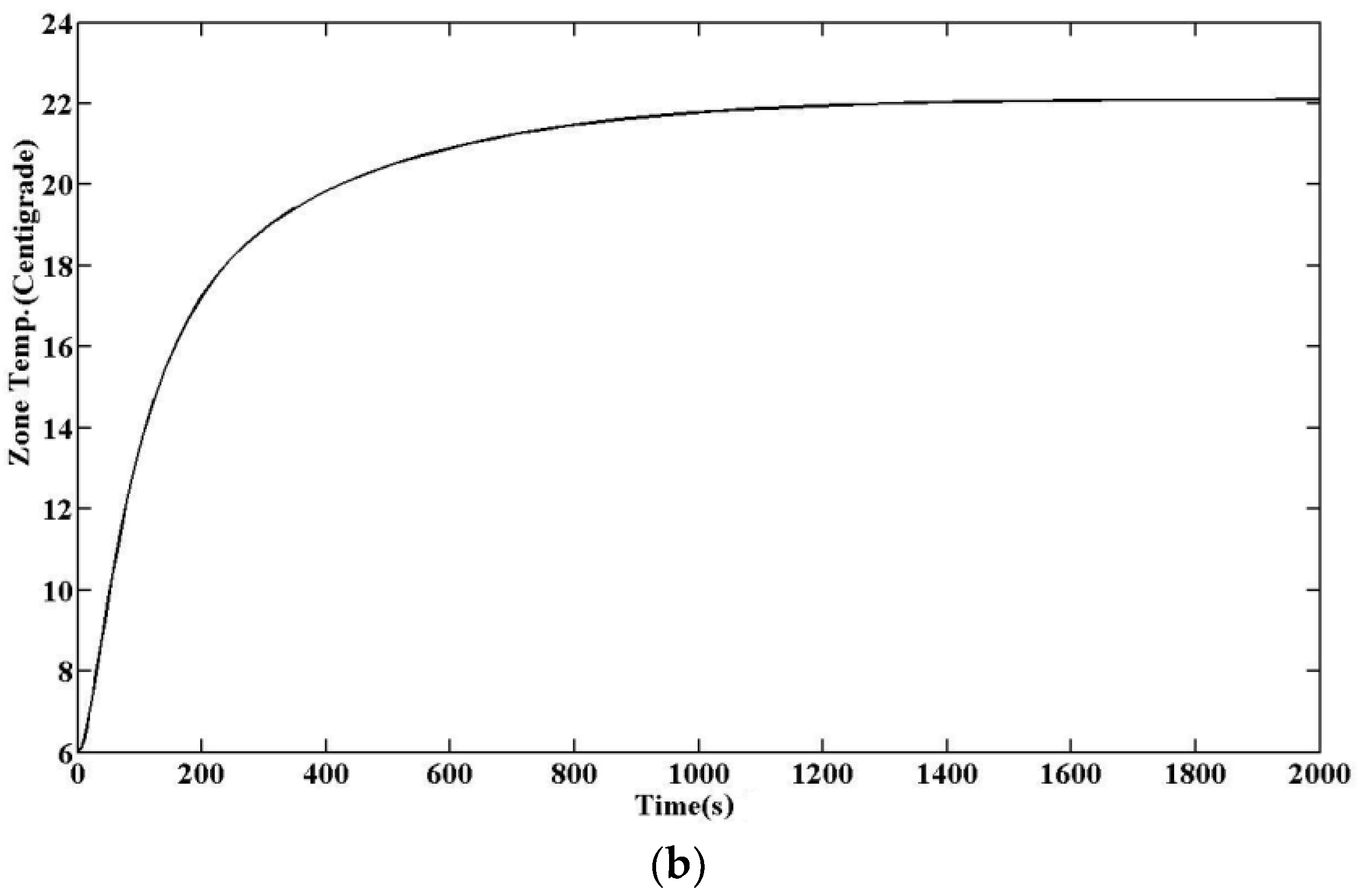
Figure 15a shows the supplied air temperature by FCM controller in winter operation season. The supplied air temperature increases softly from 5 °C to 24 °C and stabilizes to 24 °C in about 700 s or 11.6 min with no error.
Figure 15b shows the supplied air temperature by PID controller in winter operation season. The supplied air temperature increases rapidly to 27 °C at the beginning and then decreases until stabilizes to 24 °C in about 1200 s or 20 min with no error.
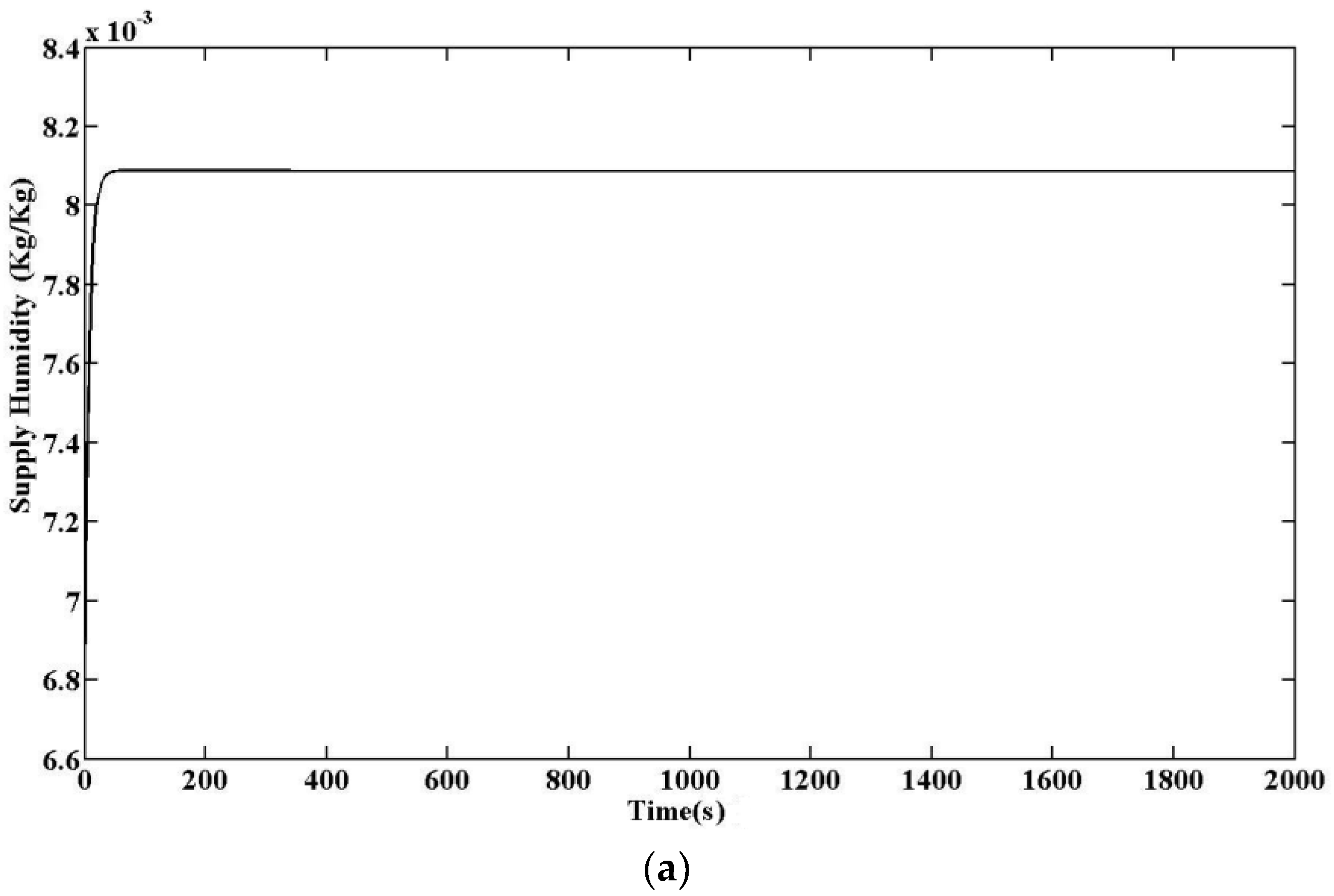
Figure 16a illustrates the supplied humidity ratio of the zone by FCM controller in winter operation season. It is clear that the humidity ratio of the zone rises rapidly from 0.0068 to 0.0081 kg/kg to reach and stabilizes to the steady state value of 0.008 kg/kg in about approximately 100 s or 1.6 min with a very small error around 0.95%.
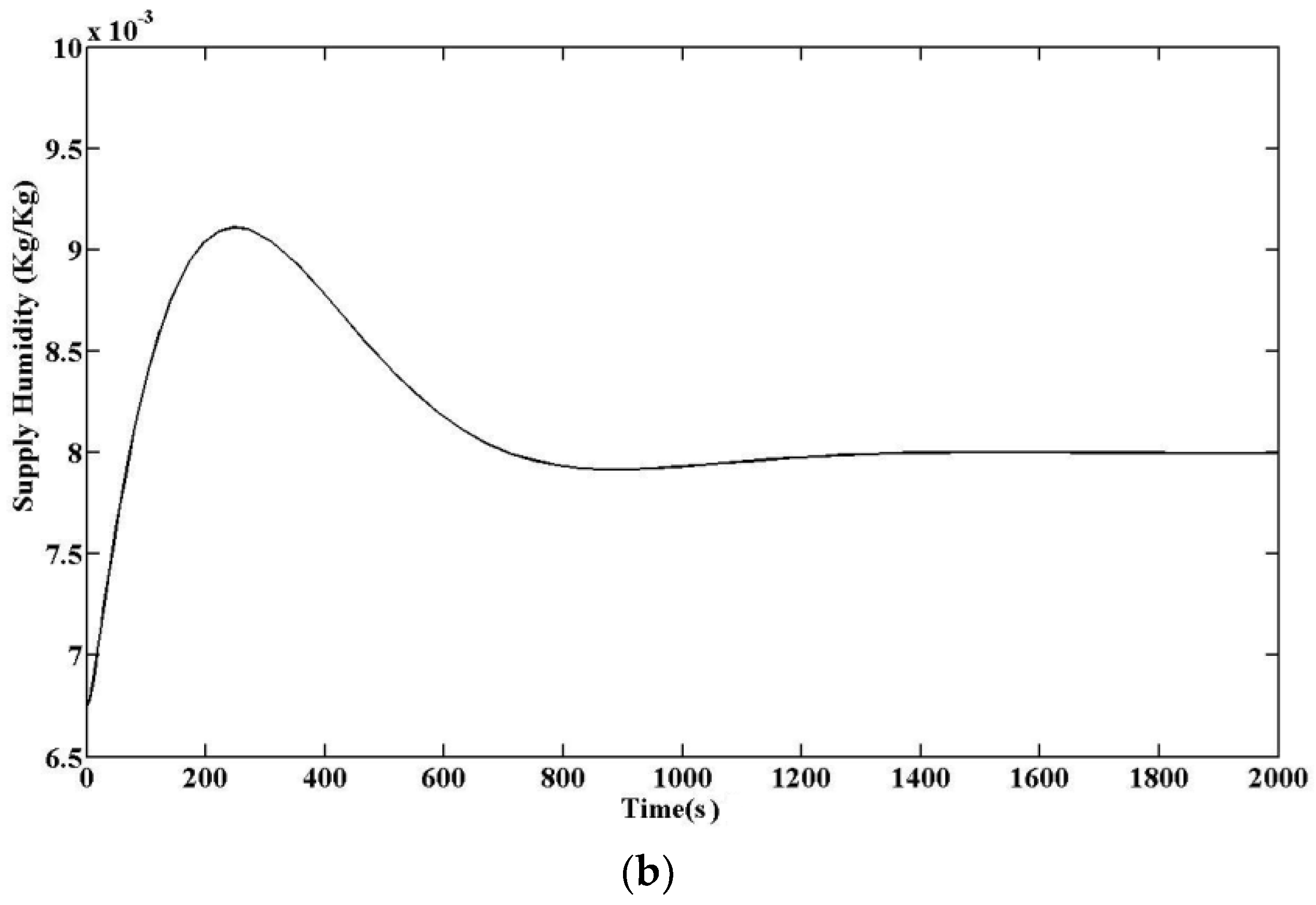
Figure 16b illustrates the supplied humidity ratio of the zone by PID controller in summer operation season. It is clear that the humidity ratio of the zone rises to 0.0093 kg/kg then declines smoothly to reach and stabilizes to the steady state value of 0.008 kg/kg in about approximately 1400 s or 23.3 min without any error.
The comparison of the results of the FCM controller and the PID controller on the same HVAC model shows that by applying the FCM controller the performance of the actuators is improved by preventing them from consuming a large amount of energy that reflects as an overshoot or undershoot by the PID controller which causes wear of the actuators over a long time. The essential advancement by the FCM controller is the cancellation of overshoots and undershoots which are seen in the PID controller designed by Tashtoush et al. [
12]. The outcomes or outputs of the system achieved by FCM clearly show that the results are smoother than with the PID one.
Although PID controllers have more benefits and practices, the FCM controllers’ outputs are smooth, however, within PID controller, prior to obtain the desired value of the set point, the outputs of certain parts of the systems have undershoot or overshoot.
It is obvious that, cancelling both undershoots and overshoots saves a consumed part of energy produced by them. By comparing the results of FCM and PID controllers, it demonstrates that the FCM controllers are faster rather than PID one. With FCM controller, the steady state took place earlier comparing to PID ones. Also, the FCM controller is more robust than the PID one.
The hybrid GPC-FCM method was utilized to the DX A/C system by Behrooz et al. [
90,
91]. The FCM method is used as a core controller and the Generalized Predictive Model is applied to assign the minimum required weights for the control procedure in the FCM control method. The model of the DX A/C system is adopted from Qi [
2]. The results of the designed GPC-FCM control method were compared by a LQG controller which was designed by Qi [
2] on the same DX A/C model. The temperature and humidity of the room are controlled by changing the compressor speed and changing the speed of the supply fan. The model of the DX A/C system is a nonlinear and MIMO model which has strong coupling parameters in the system which have a critical effect on the system. The designed controller based on the FCM method could consider all the characteristics of the system very well due to the structure of the FCM. This means that the inputs and outputs of the system were important concepts for designing the controller. Also, the two sided weight between the concepts could consider the coupling effect of parameters without decoupling the parameters. Finally, for designing the FCM-based controller a mathematical model of the system is not required and the design is only based on the actions or goals required from the system. Then the control signals can apply to the untouched model of the system (nonlinear form). In order to achieve more efficiency the initial weights of the FCM network were assigned based on the GPC method to minimize the required control signals for actuators. The results of the GPC-FCM controller show that this new designed controller is applied easily and efficiently on DX A/C systems. The results of performance analysis tests clearly show the effectiveness of the controller in tracking the reference signal under normal conditions as well as in the presence of heat and moisture load disturbances, and in initially changing the set points. In other words, the GPC-FCM controller works successfully under set point tracking and disturbance rejection conditions. The results of GPC-FCM controller were compared by the results of the LQG controller from Qi’s [
2] work in order to compare the performance of our new controller. The results of both controllers are shown under the same conditions around the operating point. The LQG controller was designed for linear condition. Therefore, it cannot work under nonlinear conditions properly and also cannot work in a wider operating range like the GPC-FCM controller. In addition, the performance index results of both controllers clearly illustrate the better performance of the GPC-FCM controller.
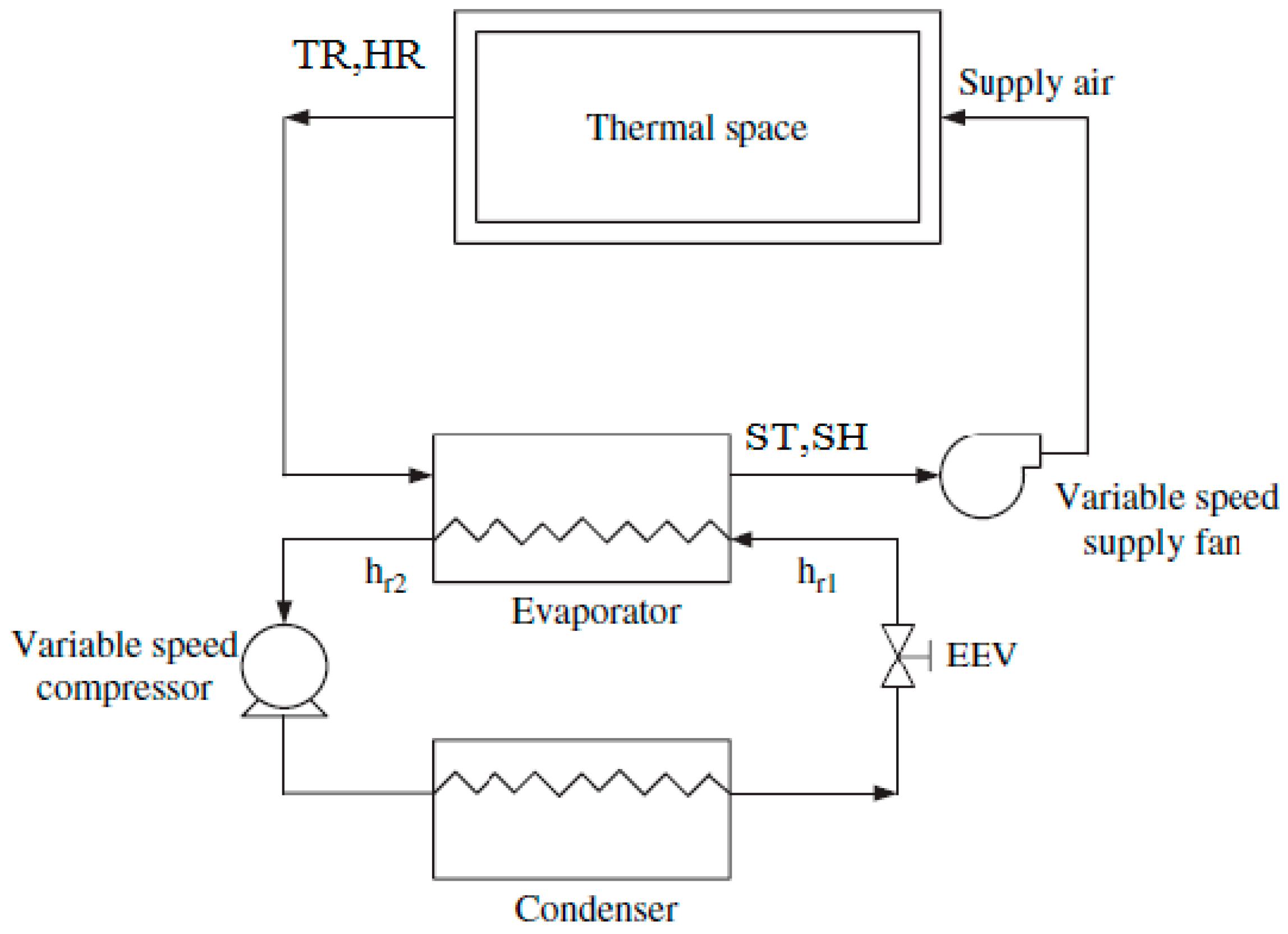
Figure 17 shows the model of the DX A/C system which is used by Qi [
2] and Behrooz et al. [
90,
91].
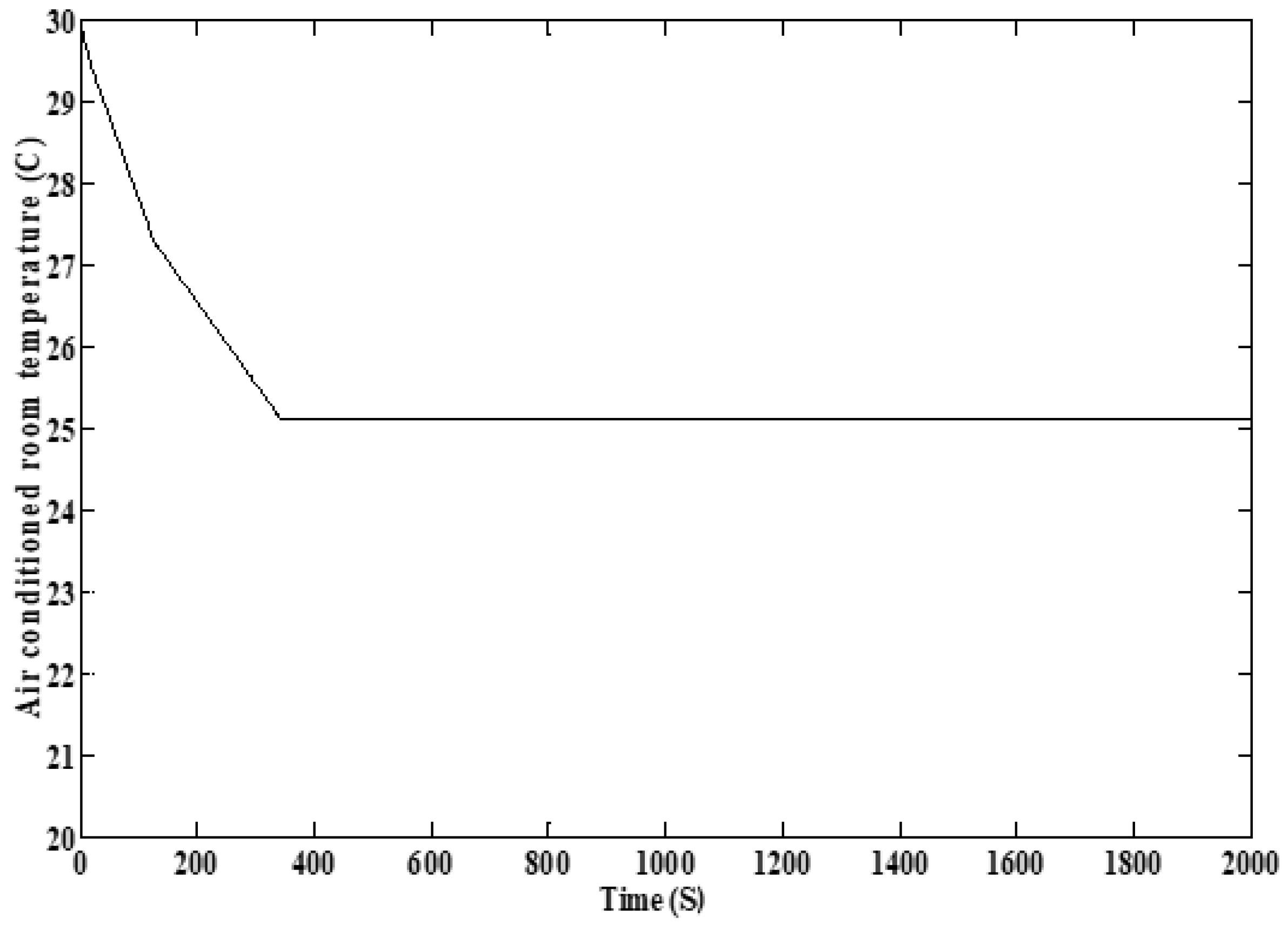
Figure 18 indicates the air conditioned room temperature which is decreased from 30 °C to 25 °C in 380 s with a 0.33% error from the desired set point.
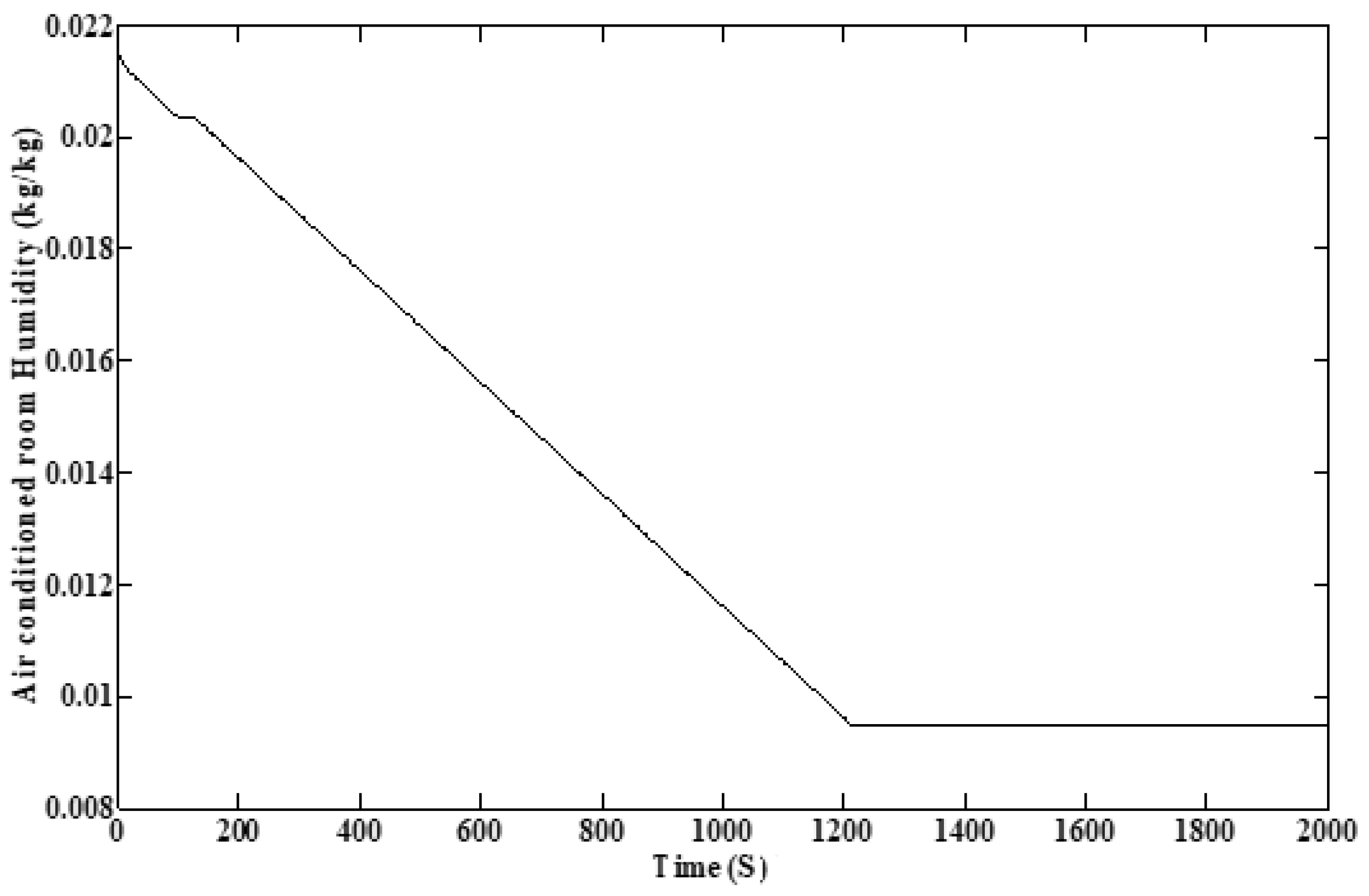
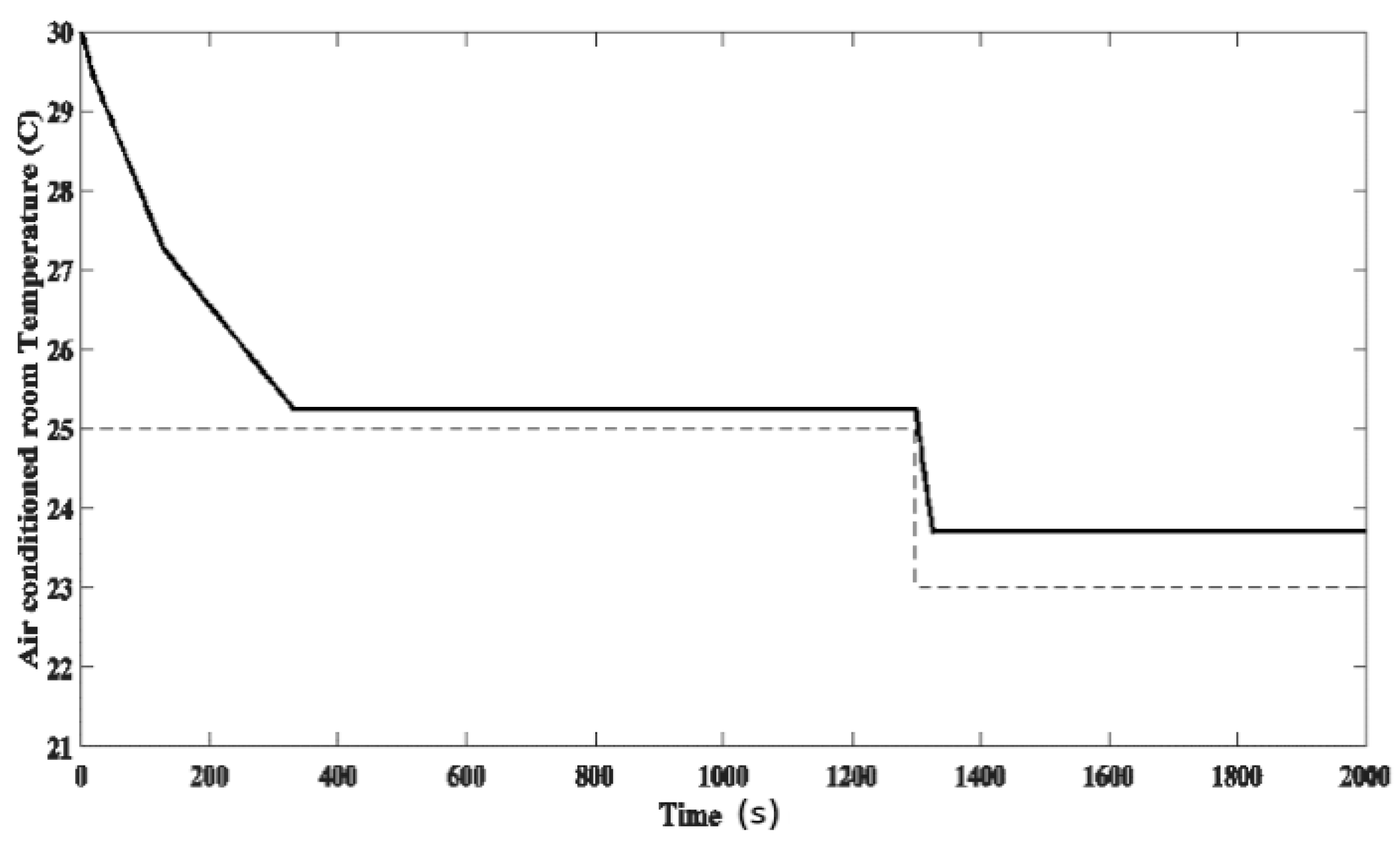
Figure 19 shows the air conditioned room humidity which decreased from 80% humidity to 48% humidity in 1200 s. The air conditioned room temperature in a set point tracking test when the set point changes from 25 °C to 23 °C in 1300 s is shown in
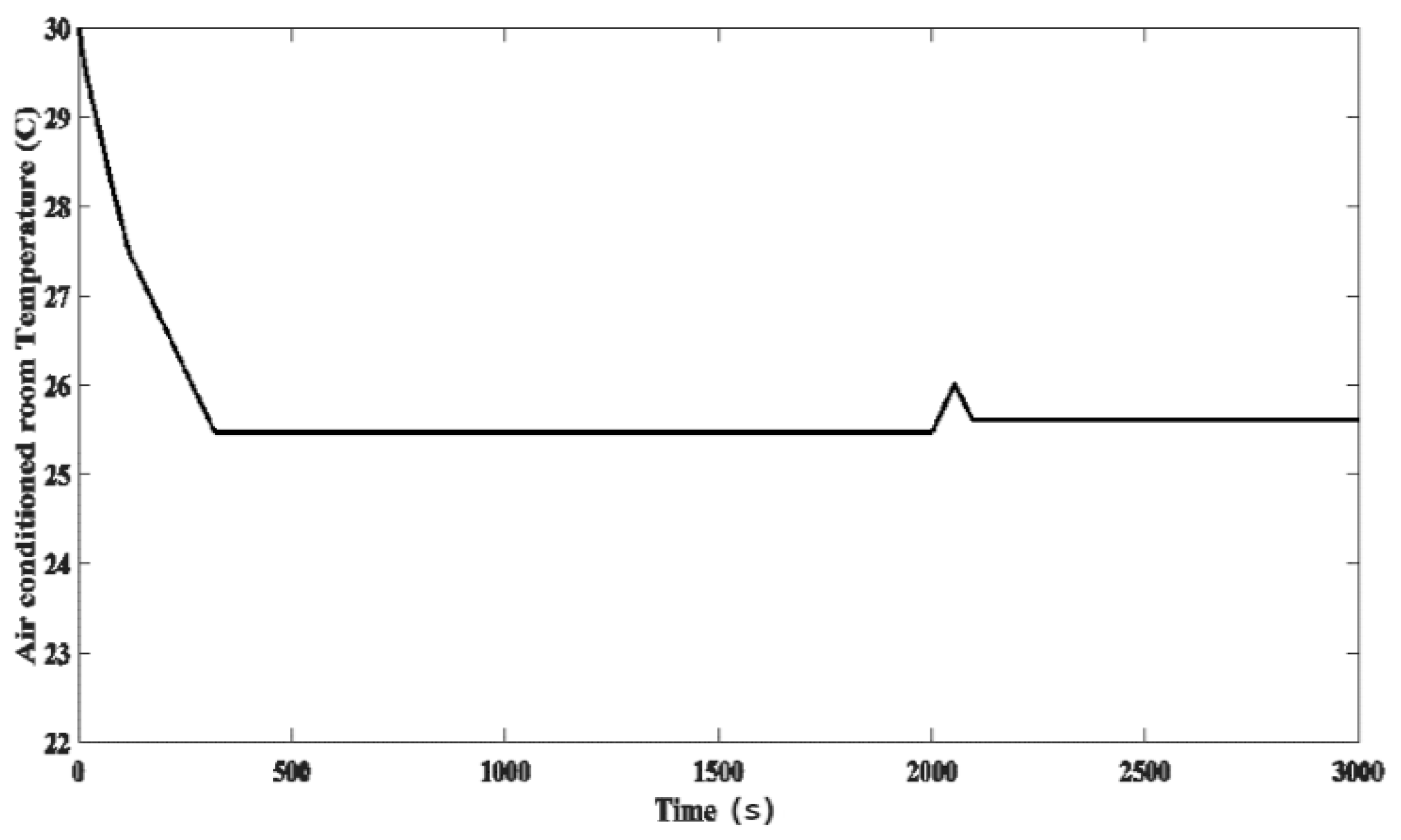
Figure 20. The temperature of the air conditioned room decreases from 25 °C to 23 °C with a 2% error from the desired set point in 25 s. It shows that the controller is able to track the new set point. The air conditioned room temperature in a disturbance rejection test is shown in
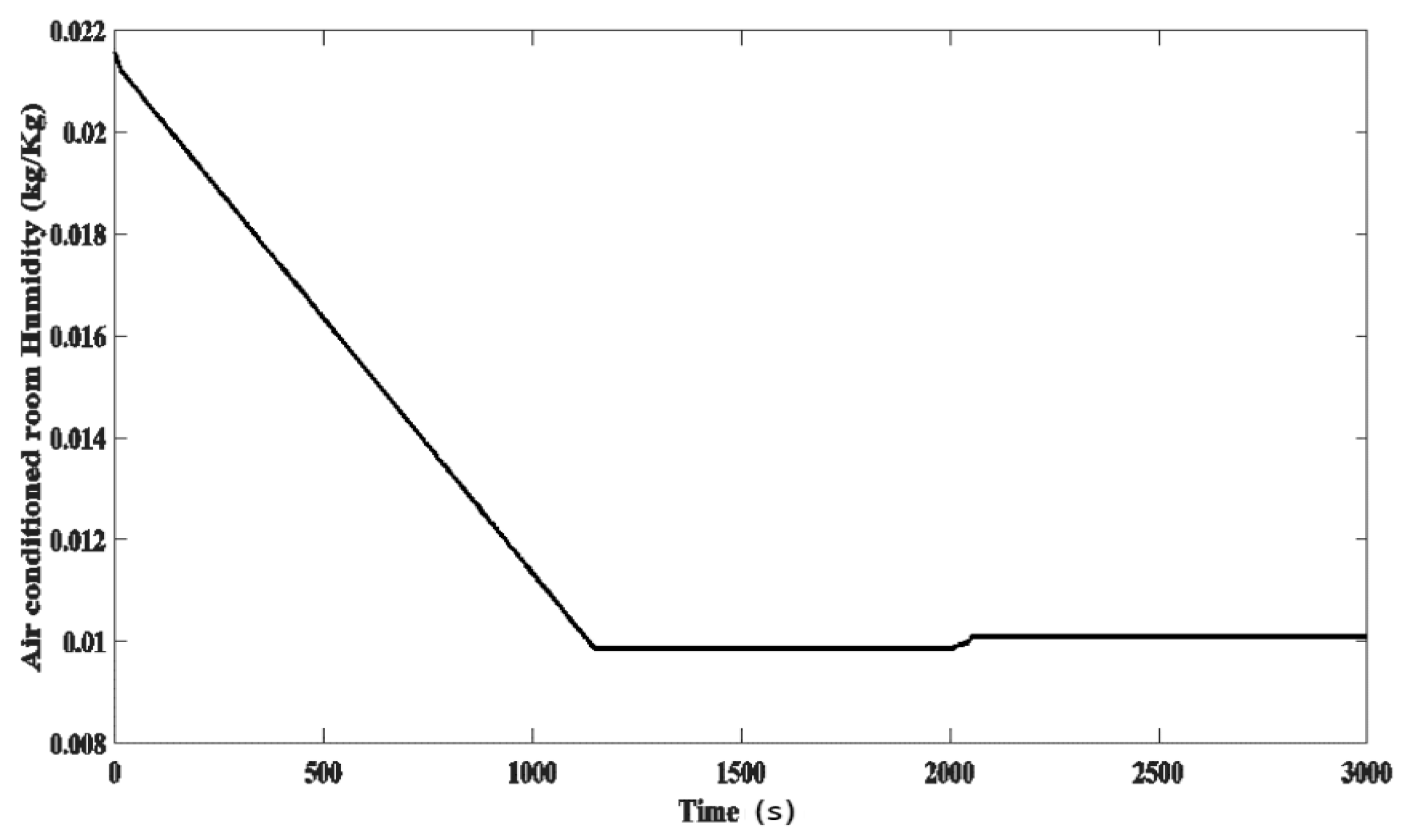
Figure 21. The controller is able to successfully reduce the disturbance in 100 s with a negligible error. The air conditioned room humidity in a disturbance rejection test is indicated in
Figure 22, which shows that the controller is able to reduce the disturbance.
Improvements of the system are:
Avoiding difficult and complex mathematical analysis for designing the controller
Designing the controller for a wide operating range
Simplicity of the nonlinear control design by elimination of observers
Increasing the accuracy and sensitivity of the system by omitting the decoupling
Less energy consumption and better energy efficiency in humid countries by eliminating dehumidifier devices
Overshoot and undershoot cancellation due to flexibility and adaptability of the FCM method
Fast settling time due to the convergence tendency of FCM, and
Using a single control scenario for integration of HVAC characteristics.
In fact, the air conditioning system is a MIMO system. Majority of earlier studies emphasized on decoupling system, as well as taking it into consideration as a single-input and single-output (SISO) system. By focusing on it as SISO system used for designing a controller [
1], the transient control operation of the two decupled feedback loops is fundamentally poor as a result of strong cross-coupling between humidity and temperature [
2]. Consequently, by decoupling artificially the control of two strongly coupled parameters could only produce poor performance of control. This would help to eliminate the artificial decoupling of the two coupled control variables, so that the control accuracy and sensitivity can be improved. Hence, the need for a MIMO nonlinear controller is clear.
On the other hand, the previous MIMO works like [
27] are using MIMO controllers on linearized models of the system in neighborhood of the operating point of the system. In other words, the system only performs and is stable around a particular operating point and the controller is not conducted for a wider range of operation. The results of the controller are in the range of 24 °C for temperature and 50% for humidity. The controller is unable to descend the temperature from more than 25 °C and humidity more than 60%. In comparison the MIMO controller based on FCM, works over a wide operating range. The humidity of the air-conditioned room descends from 80% to 48% and the temperature descends from 30 °C to 22 °C. The air-conditioned room proper comfort humidity in tropical countries is within the range of 40% to 60% [
91]. In countries across tropical reigns like Malaysia, the humidity is quite higher than other countries and mostly extra dehumidifier tools are needed to descend the humidity. Employing GPC-FCM controller on a DX A/C system might remove one extra device to save more energy and operates with just single device instead of two [
90,
91].
In the case of HVAC systems, the applied nonlinear control methods are limited. Based on Moradi et al.’s [
48] work, gain scheduling and feedback linearization methods are separately used in a nonlinear multi input–multi output (MIMO) dynamic model of an air-handling unit (AHU). In this MIMO model, air and cold water flow rates are manipulated to achieve the desired tracking objectives of indoor temperature and humidity ratio. Using the controller based on a feedback linearization approach leads to more quick temperature and humidity ratio responses in tracking objectives, but with more overshoots. Especially in tracking the ramp sections of desired set-paths for humidity ratio, more overshoots can be seen in the results. A comparison between the feedback linearization method with gain scheduling method on the same AHU system shows that the feedback linearization method has a faster time response in tracking the desired set points, especially the temperature, and more robustness in the presence of arbitrary random uncertainty in model parameters. Compared with FCM, the new controller based on the FCM method is able to eliminate the overshoots and undershoots. The structure of FCM is able to define and limit the working range of nodes. Thus, the values of nodes could not exceed from these limitations and this avoids overshoots or undershoots. Using the controller designed based on gain scheduling leads to less consumption of energy in AHU. Less variation of air and cold water flow rates are required for achieving the tracking objectives when the gain scheduled-based controller is used [
48]. A comparison between gain scheduling method feedback linearization with the method on the same AHU system shows that the system with gain schedualing control method has less energy consumption due to the less oscillation of air and cold water valve positions. As disadvantages of the gain scheduling control design, the identification of linear regions and design of switching logic between regions is necessary, and the manual tuning of multiple PID controllers in these regions can be quite cumbersome. In the FCM method, there is no manual tuning and all the required control scenario is a single soft control scenario.
For the single-zone VAV HVAC&R system described by Semsar-Kazerooni et al. [
50], a bilinear model was considered for describing both temperature and humidity dynamics; a back-stepping controller was designed for the feedback linearized model, considering heat and moisture loads as measurable disturbances; and a stable observer was designed for non-measurable disturbances backed by simulation results for optimal energy consumption. Simulation results show that the closed-loop system has good and fast tracking, offset-free and smooth response with high disturbance decoupling and optimal energy consuming properties in presence of time-varying loads. Improvements of the system by using this control method in comparison with other common control methods like PID are removing the offset and oscillations, which are measured by an energy index. In other words, longer life of actuators due to less actuator repositioning which makes it a more beneficial method from an industrial viewpoint. Difficulty in finding a Lyapunov function, all state variables must be measurable otherwise a nonlinear observer is needed, are the disadvantageous of this method. In other words, this work involves complex mathematical analysis and also for controlling the system step by step designs the different control scenarios like linearization and decoupling of the model to find some required parameters then using the other method to transfer the model to the nonlinear form. As a result, due to the complexity of system and model uncertainty, a simple control algorithm with simple mathematics is required. As the structure of a fuzzy cognitive map has the ability to design the controller based on the needs of the system and what is expected the system must do, not how it works, it could be a suitable solution for HVAC systems. By applying FCM, all the requirements of the system could be considered like MIMO, grouping coupling effects and nonlinearity in a single control scenario. This method also uses simple mathematics and algorithm to define the required control signals values for obtaining the desired set points.
6. Significance of the FCM Method in Relation to the Development of Nonlinear Control Algorithms
The significance of designing the control method based on FCM is that it offers a simple approach to achieving a nonlinear control algorithm without involving difficult mathematical analyses for deriving the control law process and it eliminates the need for observations, thus making the nonlinear controller design simple.
As the purpose of the research is mostly achieving full control of HVAC, A/C and DX A/C systems, a control method needs to consider the MIMO, nonlinearity and coupling effect characteristics of the mentioned systems. Consequently, due to the particular structure, the FCM method is selected to solve the problems.
In order to apply nonlinear control methods on HVAC systems, Moradi et al.’s [
48] work could be referred to as an example of nonlinear control methods. The two nonlinear methods of gain scheduling and feedback linearization are applied on the nonlinear MIMO dynamic model of an air-handling unit (AHU) separately. In order to reach the desired indoor temperature and humidity ratio objectives, the air and the cold water flow rates are used in this MIMO nonlinear model of an AHU. The tracking objectives of temperature and humidity ratio by feedback linearization controller have quicker time responses. Although the time responses of tracking objectives are very fast, the results have more overshoots. Generally, in the case of feedback linearization the advantages are as follows:
Nonlinearity must not be known exactly
Inner disturbances are reduced at the same time, and
Even if not completely eliminated, the nonlinearity is greatly reduced.
And the disadvantages are as follows:
Additional measurements are needed, and
The time scale difference of the inner and outer loop must be large enough (inner loop must be much faster than the desired overall closed loop dynamics).
Using the gain scheduling controller causes less energy consumption of an AHU. In order to achieve the tracking objectives with a gain scheduled-based controller, less variation of cold and air water flow rates are needed [
48]. Referring to Afram and Janabi-Sharifi [
3], the design of switching logic between regions and the identification of linear regions is essential for gain scheduling control design. Also, the manual tuning of multiple PID controllers in these regions can be quite cumbersome. In general, in the gain scheduling control method the advantages are as follows:
Linear techniques are applicable,
The method can be understood as a feed forward control for certain scheduler variables, and
Often a small distinct set of control parameter values is sufficient.
And disadvantages are as follows:
Some engineering effort is needed for finding the dependency between parameter values and scheduled variable,
Slow operating point’s variations leads to nonlinear behavior of the controlled system, and
Proof of stability might pose a problem.
A feedback linearization technique available for the design of nonlinear control systems was applied by Thosar et al. [
49] on a Variable Air Volume of Air Conditioning (VAVAC) model. It was simulated with a laboratory-scale plant. Also, the single-zone VAV HVAC & R system was considered as a bilinear model by [
50] for describing both temperature and humidity dynamics. A back-stepping controller was designed for the feedback linearized model by considering heat and moisture loads as measurable disturbances. A stable observer was designed for non-measurable disturbances backed by simulation results for optimal energy consumption. In general, the back stepping technique’s advantage is that it can be applied recursively in terms of the extension of the dimension of the system. The disadvantages are as follows:
Difficulty in finding a Lyapunov function,
All state variables must be measurable,
Nonlinear observer needed, if not all state variables are measurable, and
Sensitive to parameter variation.
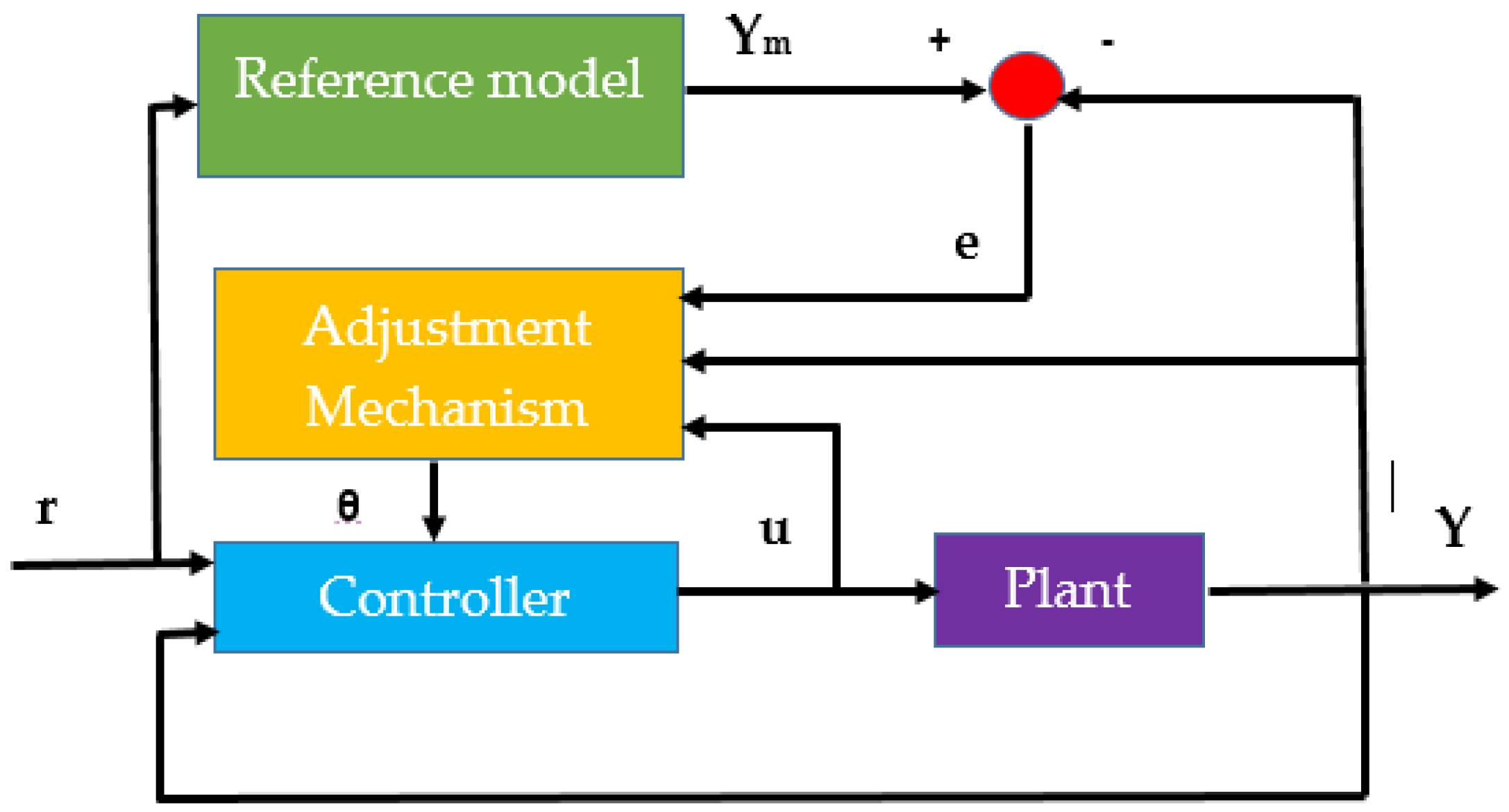
Moreover, Hodgson [
52] and Pasgianos et al. [
53] used the adaptive control techniques to derive the control law based on steady state. Advantages of adaptive techniques are as follows:
Nonlinearities due to parameter changes can be eliminated or reduced, and
Wider operation ranges possible.
And disadvantages are as follows:
Adaptation loop must be slower than control loop,
Needs enough excitation (otherwise there might be a wind-up problem in parameter estimation),
Proof of stability difficult, in particular in case of changing process parameters, and
Leads often to nonlinear observer problems.
The applied nonlinear techniques are involved with identification of the stable state, complex mathematical analysis and linearization around operating point. This means that these control techniques use difficult and complex mathematics. Also, the uncertainty of the HVAC systems models make the process of designing the suitable controller very difficult and by linearization of the model, the operating range will be limited. On the other hand, as the FCM method is based on values, events, goals, actions and tendencies of the system [
98], then the controller could be simply designed based on the required scenario for the HVAC systems. Since the structure of FCM is based on a graph structure with simple mathematics and the tendencies or goals of the system, the design of a controller does not involve the complexity of the system and complex mathematical analysis for deriving the control law. It would easily be applicable to a nonlinear dynamic model of the system.
7. Summary and Conclusions
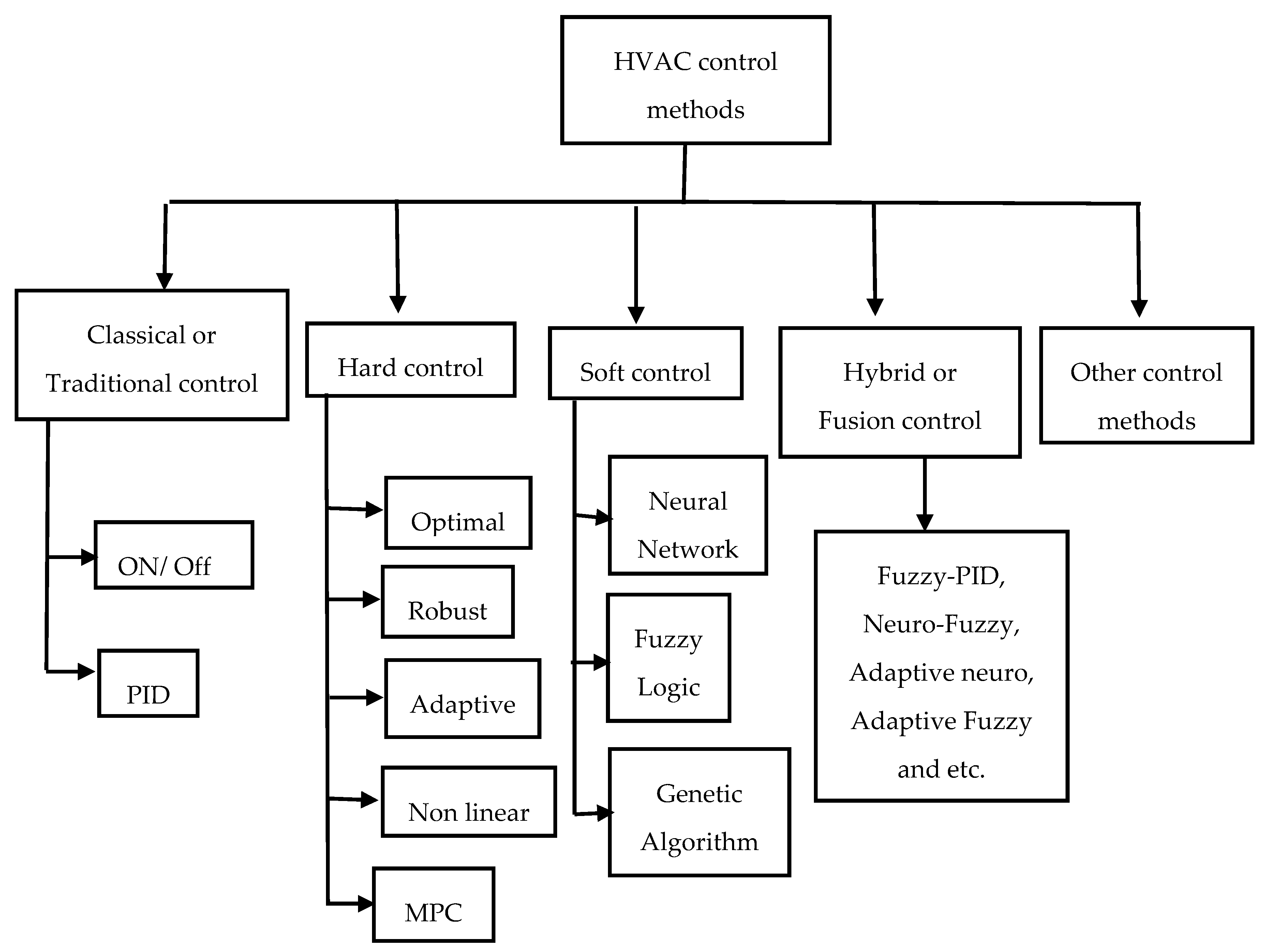
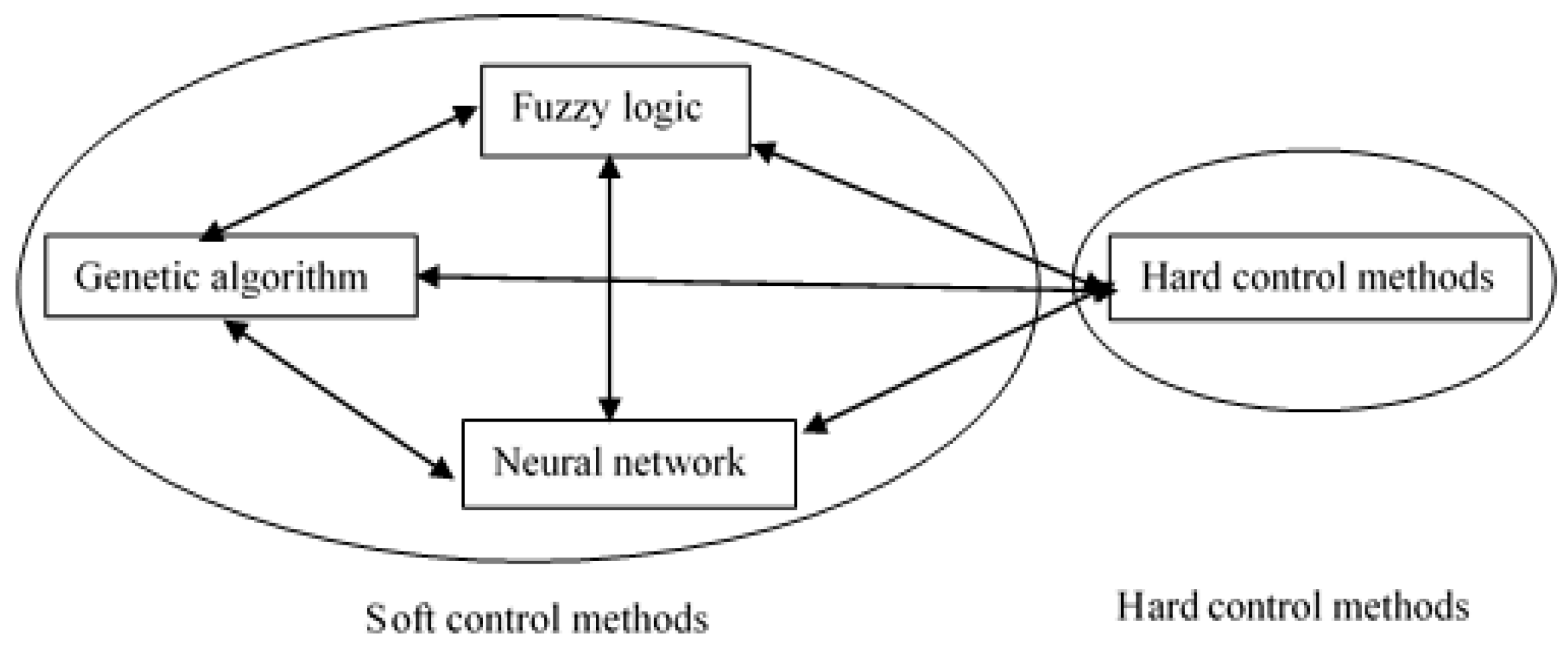
To summarize, in this review article an overview of different control methods applied for HVAC systems is provided. Also, specifically the nonlinear control method is studied in general and particular in the case of HVAC systems. The overview consists of different control categories divided into hard, soft and hybrid categories.
Although the hard control techniques are used widely and are still the first choice in building control, it seems that most hard control techniques did not take into consideration the variety of constraints on controls and states to reveal the real conditions. Generally the wide implementation of the traditional and hard control methods is only by reason of their simplicity in application and their low initial cost. Due to their high maintenance cost, energy usage and inefficiency for the MIMO structure, the interest and attention to intelligent or soft and hybrid methods would be increased.
On the other hand, as the intelligent control methods are model-free methods and only based on the human sensitivity about the thermal comfort, they could be a good alternative for HVAC systems which are nonlinear, complex, time-delayed processes. Also, these methods could be applied to improve and upgrade the hard and traditional control categories. The soft control methodology can be employed for decision making and human involvement goals. Alternatively, the hard control is used for accuracy, stability, precision, and robustness. Moreover, the combinations of these methods in hybrid methods are used for robustness and good performance in a wide variety of operating conditions.
Since the main problems of HVAC systems are intense nonlinear factors, variable conditions, interactions between climatic parameters, uncertainty in the model, and variation in system parameters the HVAC systems are considered as nonlinear, time-varying, inherently complex and MIMO system with coupling effect. Therefore, a control scenario with simple mathematics and easy implementation to control the MIMO nonlinear systems of HVAC is required to stabilize the temperature and humidity simultaneously and mimic the reality as close as possible in order for the designed system to be practically applicable.
In conclusion, although the hard control methods are widely used in HVAC systems, the soft control and fusion control groups have better records in this area. The hybrid methods could be more suitable due to their structure in applying them to nonlinear, MIMO systems. Therefore, designing a hybrid MIMO non-linear intelligent robust controller could be significant for full control purposes of the system. By considering all the mentioned features, a control scenario based on soft computing methods should be required which can cover the interlinear and MIMO characteristic of the system in simple algorithm without involving the linearization of the system and difficult mathematics and analysis for finding the control law. As a result, the combination of neural network and fuzzy logic methods as a unique fuzzy-graph structure network based on the system’s tendencies and goals could be a suitable solution in this area. Also, the MPC method could be combined with them as an optimization solution to assign the best required weights between the nodes of the graph in a single algorithm. The hybrid control methods based on FCM reveal that the FCM method can offer a convenient solution when facing complex problems, like control of systems with many parameters to consider such as building automation. The FCM control method provides much faster and accurate results for using the effective performance of system without wasting time in the mathematical modelling of the system and finding the Lyapunov function for designing a nonlinear controller. The FCM method can be easily used by people who are not completely familiar with the system. For some systems which describe the entire system it is extremely difficult or sometimes it is impossible with an accurate mathematical model, the FCM method is a more useful and attractive way to show the system in a graphical way with the causal relationships among states-concepts. As this symbolic method of control is easily adaptable and depends on human expert knowledge and experience, it can be considered as intelligent. Thus, the application of FCM as a control system can contribute in the expansion and improvement of more autonomous and intelligent control systems. Finally, the FCM method has some characteristics such as small number of iteration steps, simple algorithms and acceptable robustness which make it suitable for real time control tasks in complex, nonlinear processes.

 ,
, 

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}