Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles



Abstract
:1. Introduction
2. Target Traction Motors and EV
- (a)
- output power: greater or equal to 10 kW (this makes a total power of 20 kW for the EVs. Explained later);
- (b)
- torque density: greater or equal to 30 Nm/L;
- (c)
- maximum current density: 16–17 Arms/mm2;
- (d)
- outer stator diameter: 160 mm;
- (e)
- air gap: 0.5 mm;
- (f)
- number of slots: 36;
- (g)
- winding configuration: distributed winding; and,
- (h)
- efficiency: greater or equal to 95%.
3. Theoretical Background
4. Performance Evaluation of Traction Motors
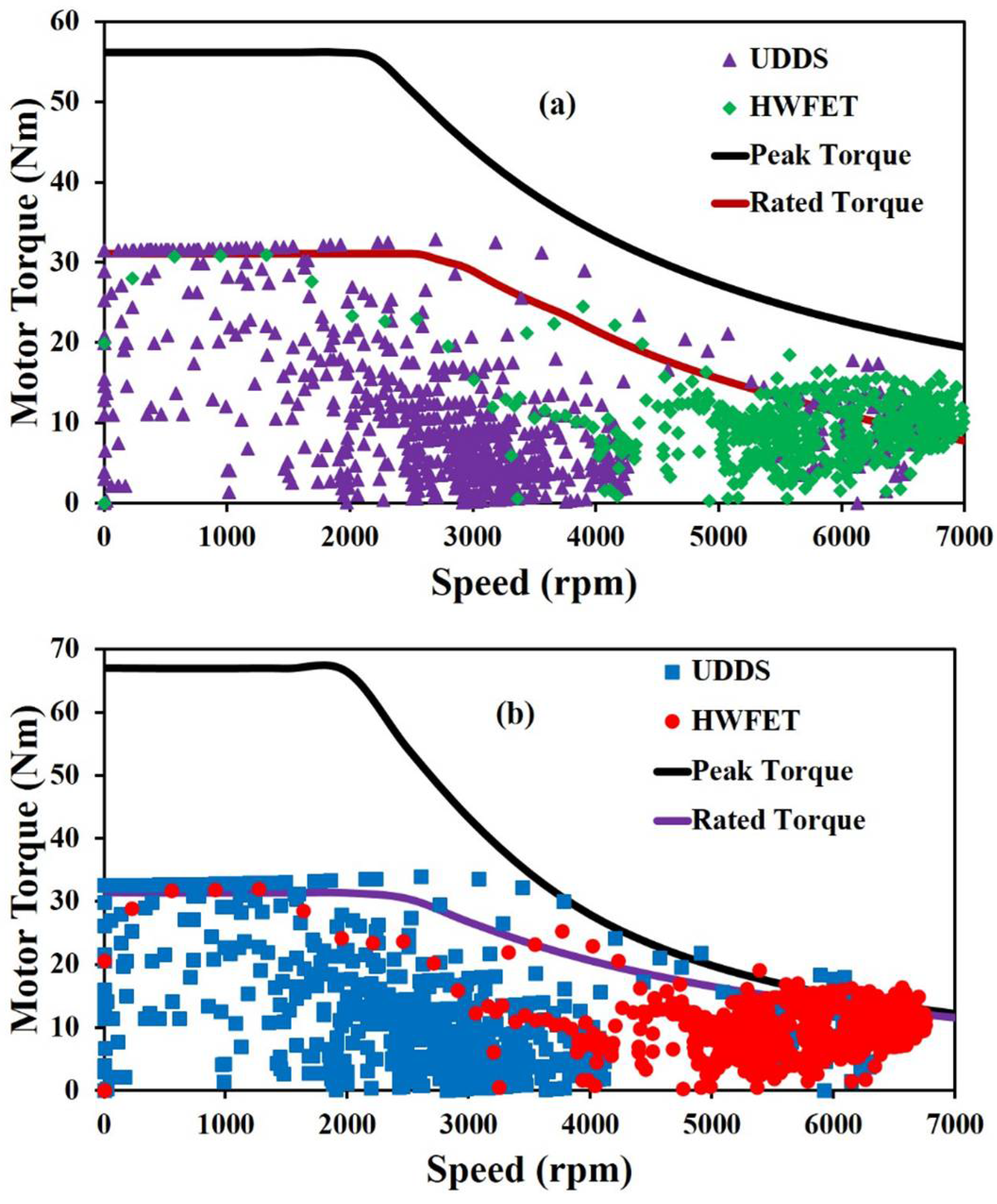
5. Driving Cycle Applications
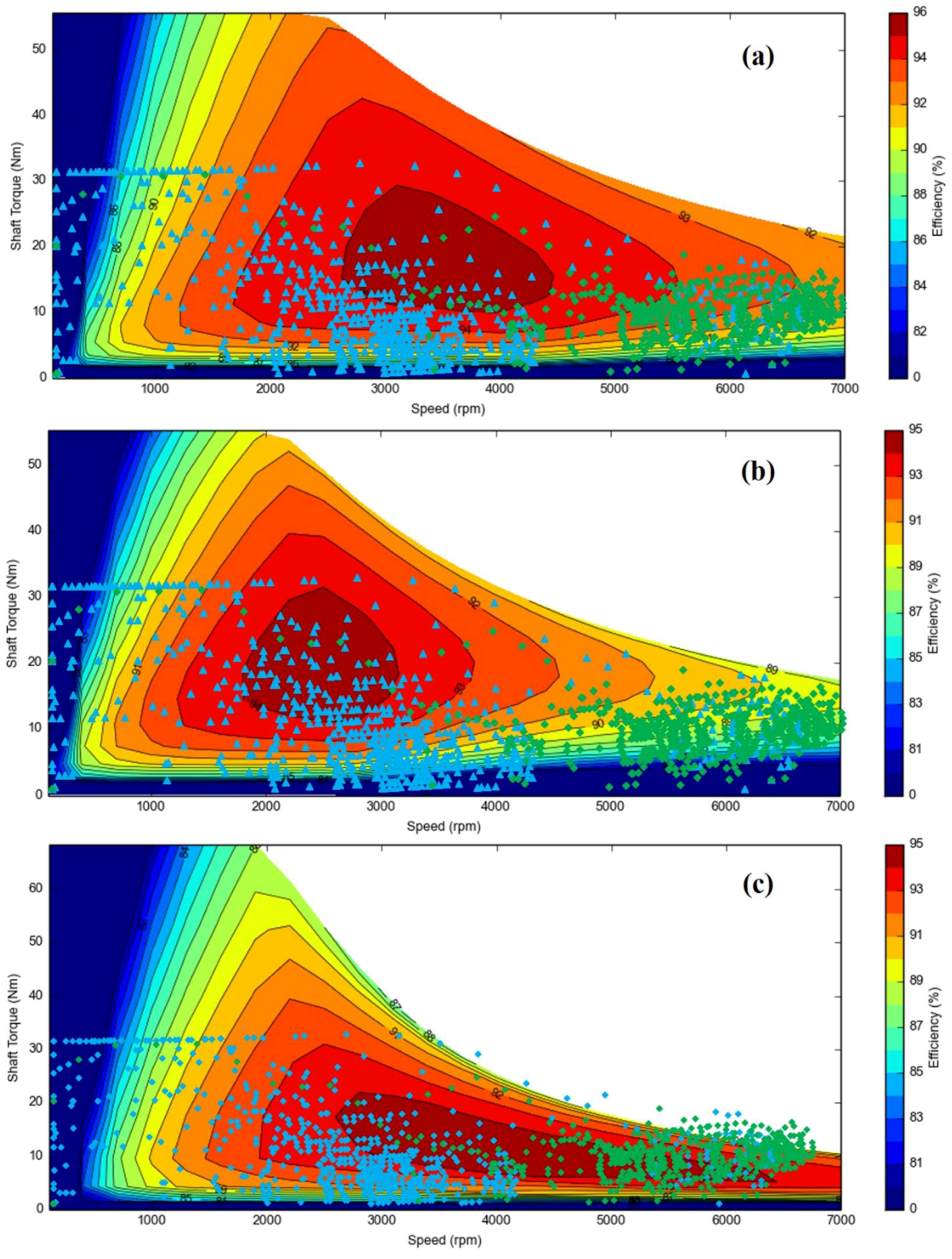
6. Comparison of Motor Performance in Driving Cycles
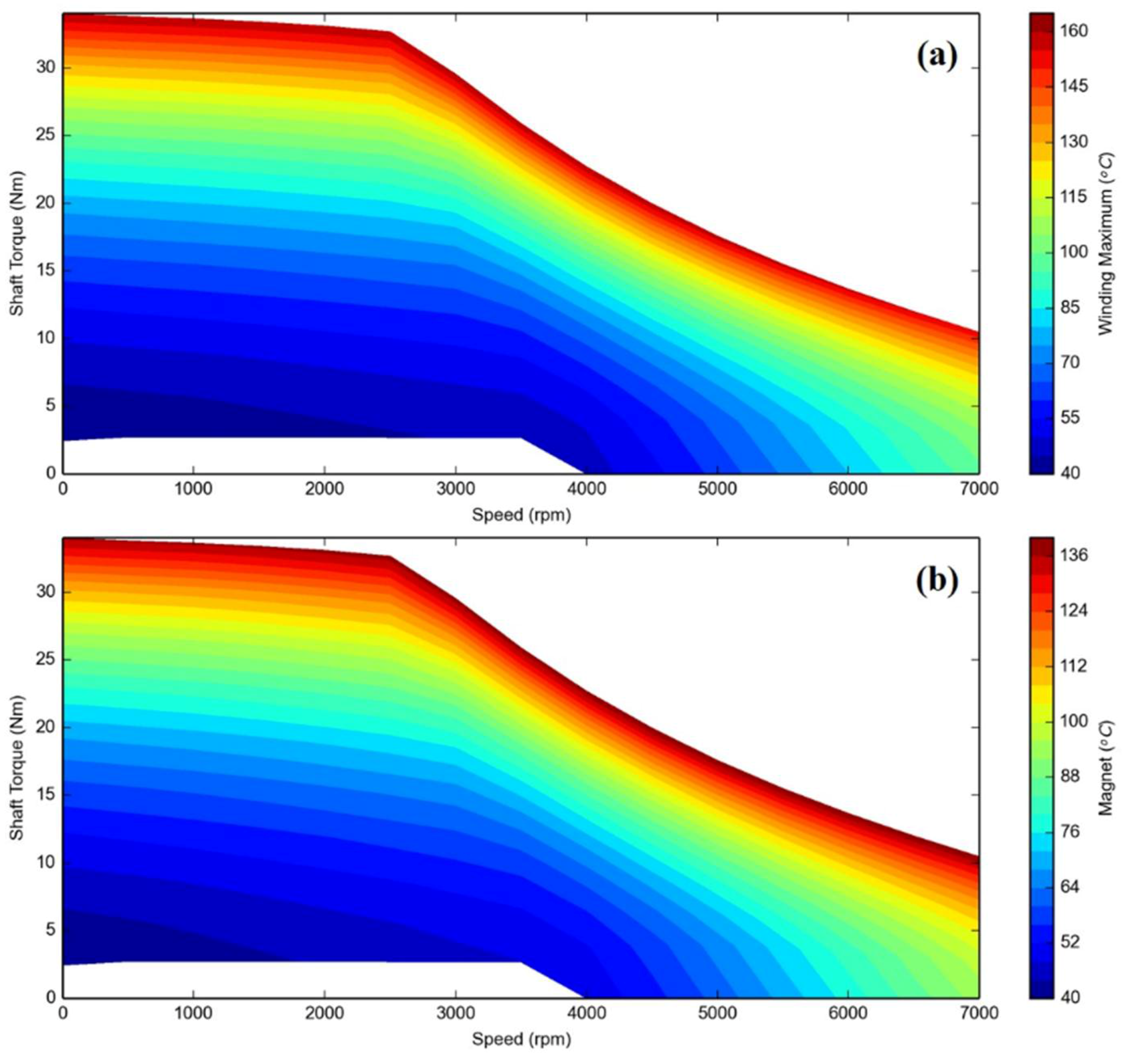
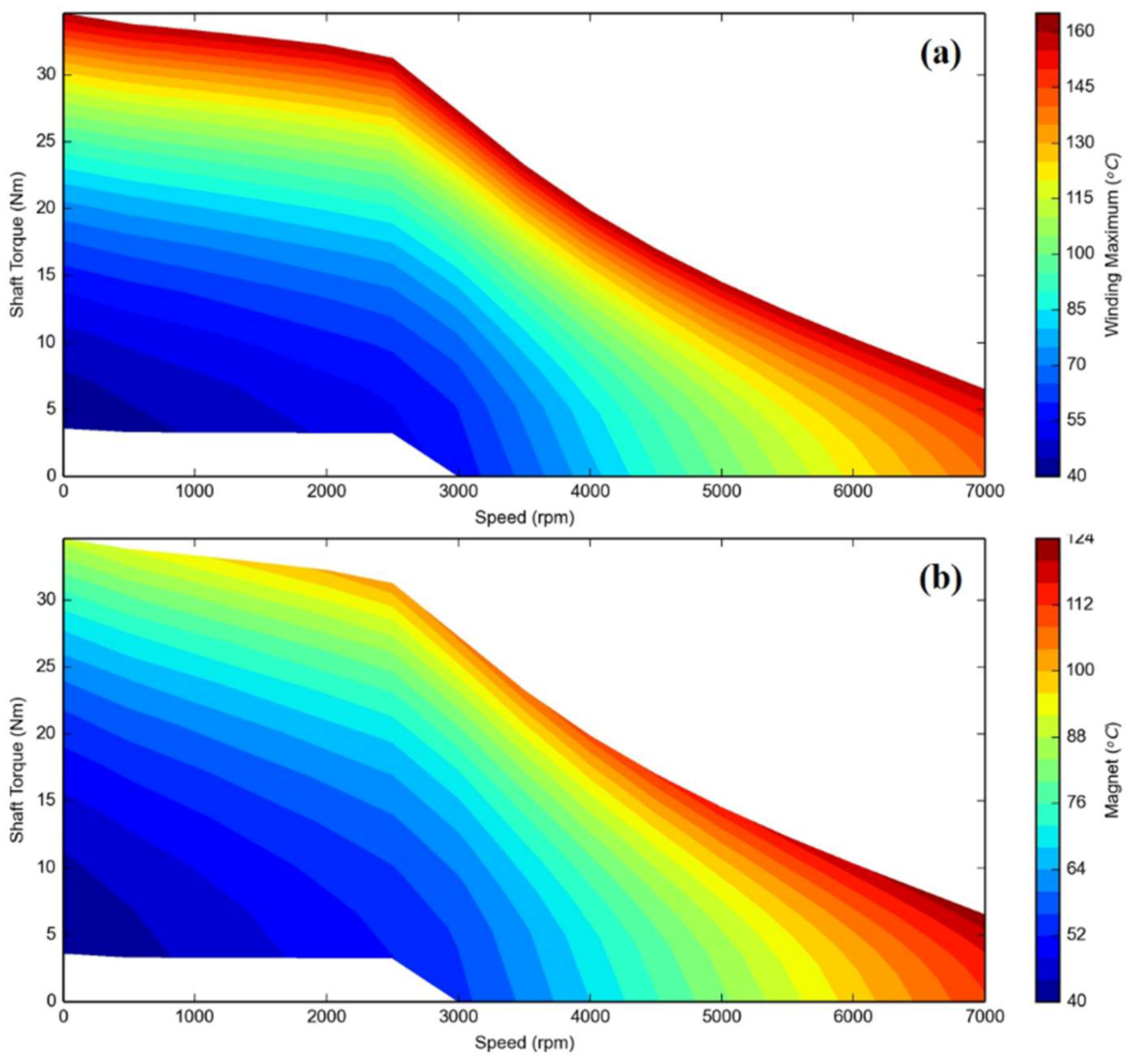
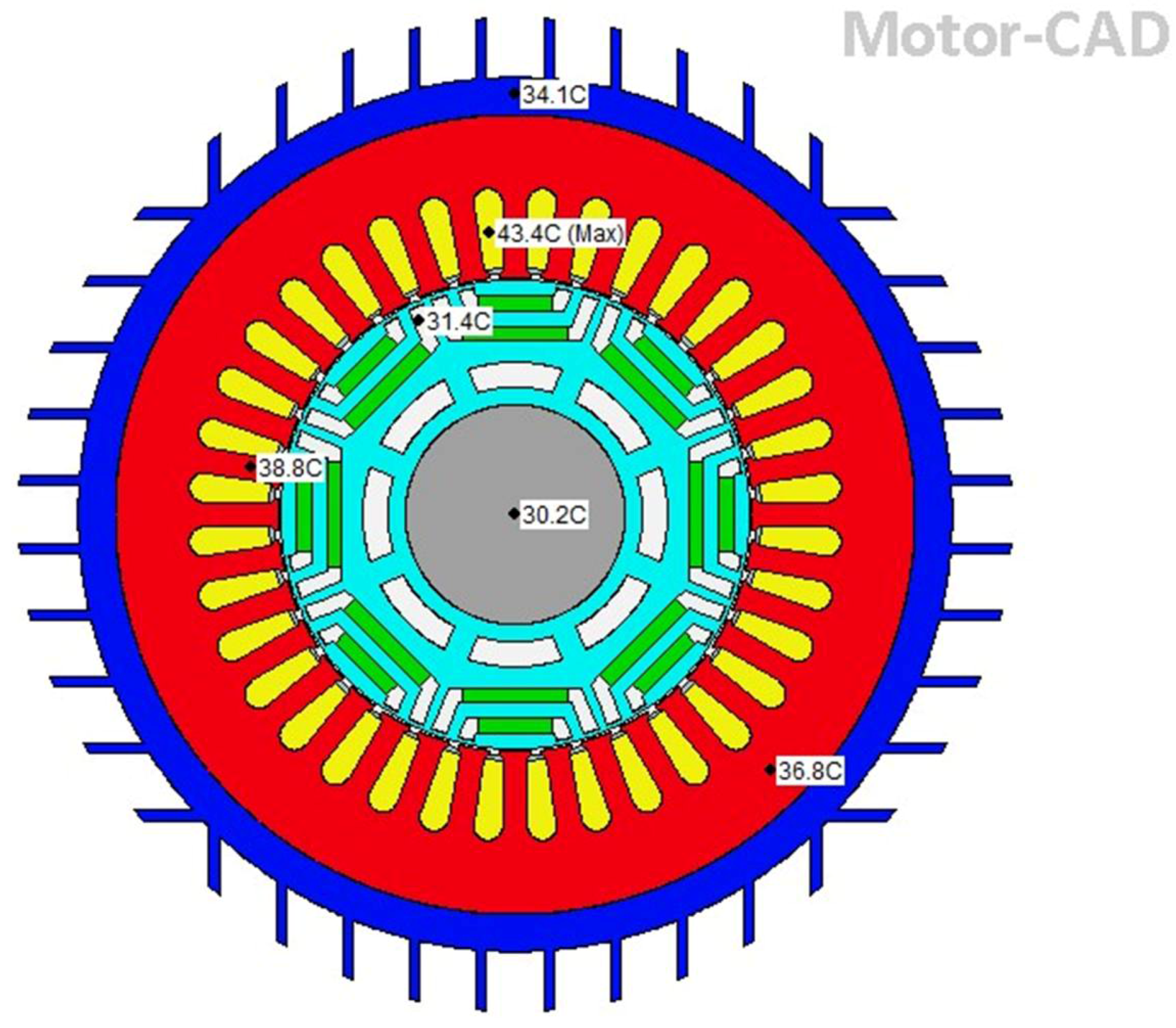
7. Thermal Analysis with Driving Cycle
8. Discussions
- -
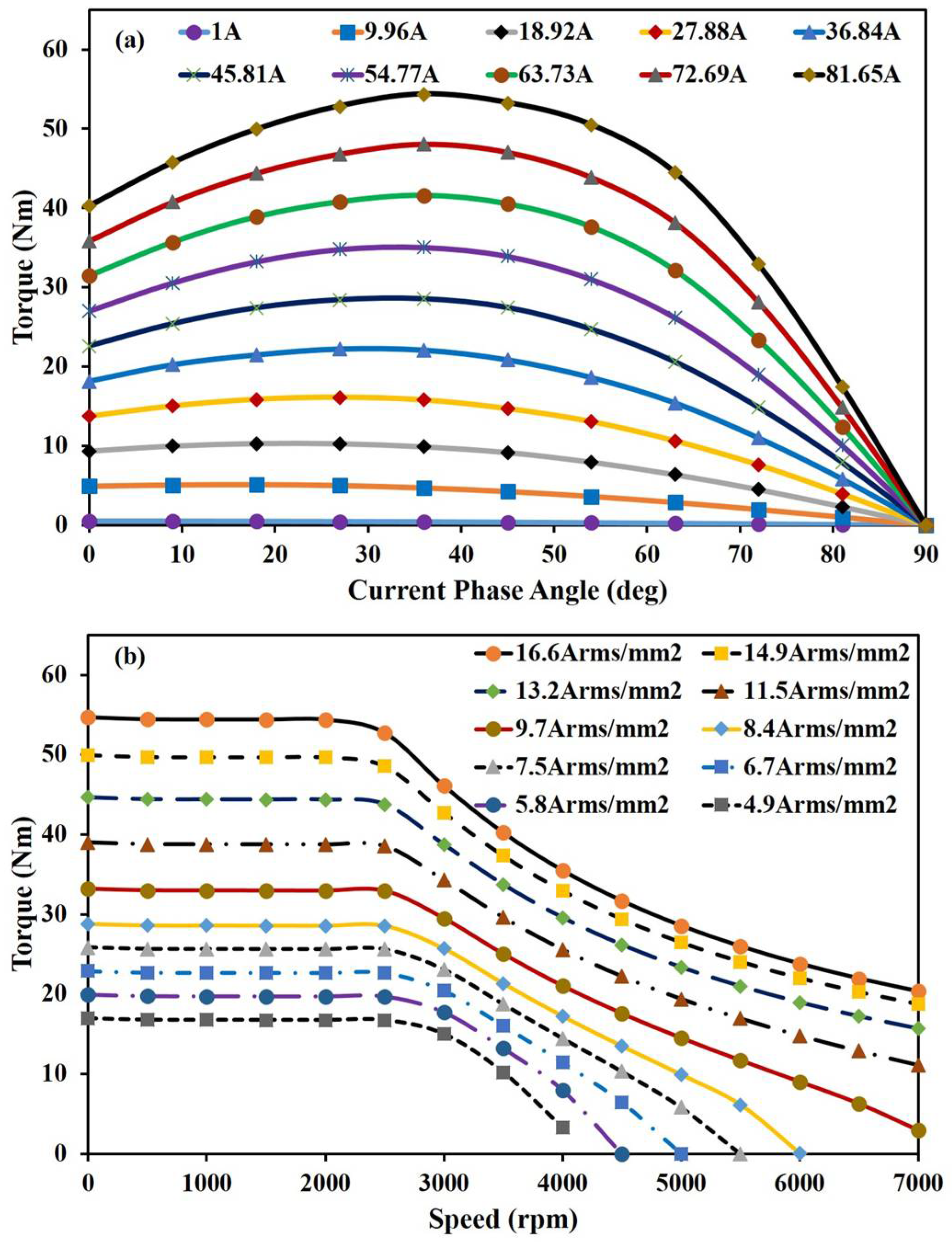
- The IPMSMs possess the benefit of high PM flux linkage, low armature current, and current angle to reach the maximum torque. Meanwhile, the torque of PMa-SynRM is almost derived from the armature current. Therefore, a higher armature current and current angle are applied in order to generate the maximum torque for PMa-SynRM.
- -
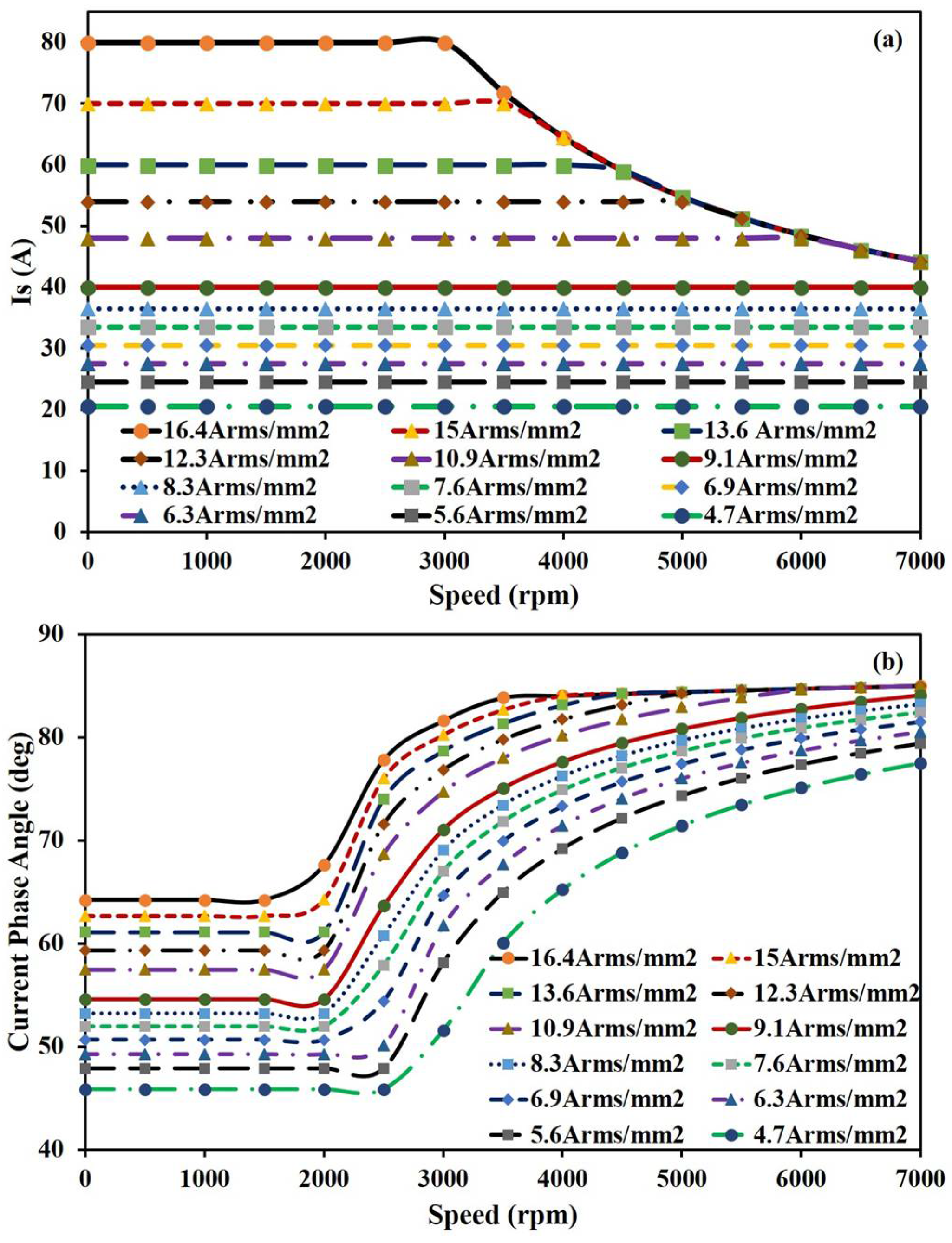
- The PMa-SynRM can achieve very high speed at low armature current because the reluctance torque and saliency ratio are higher than that of IPMSMs. In addition, the PMa-SynRM has a higher efficiency at high speed than that of IPMSMs. This is the advantage of PMa-SynRM for high speed application.
- -
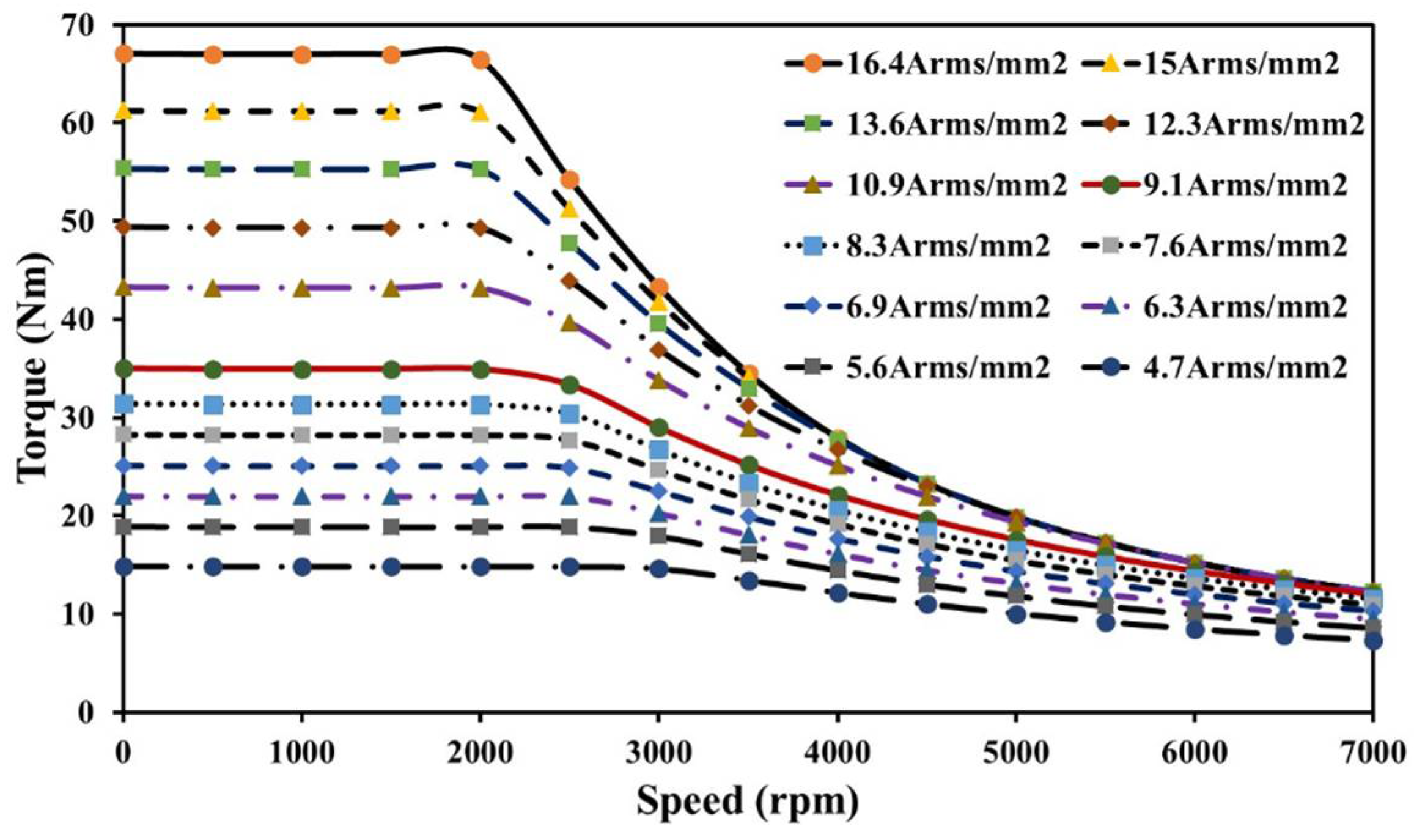
- To produce the same power as the IPMSMs, the PMa-SynRM should be designed with a higher motor volume than that of the IPMSM. Moreover, higher electrical loading is needed for the PMa-SynRM, and this can lead to temperature rise that limits the operating range.
- -
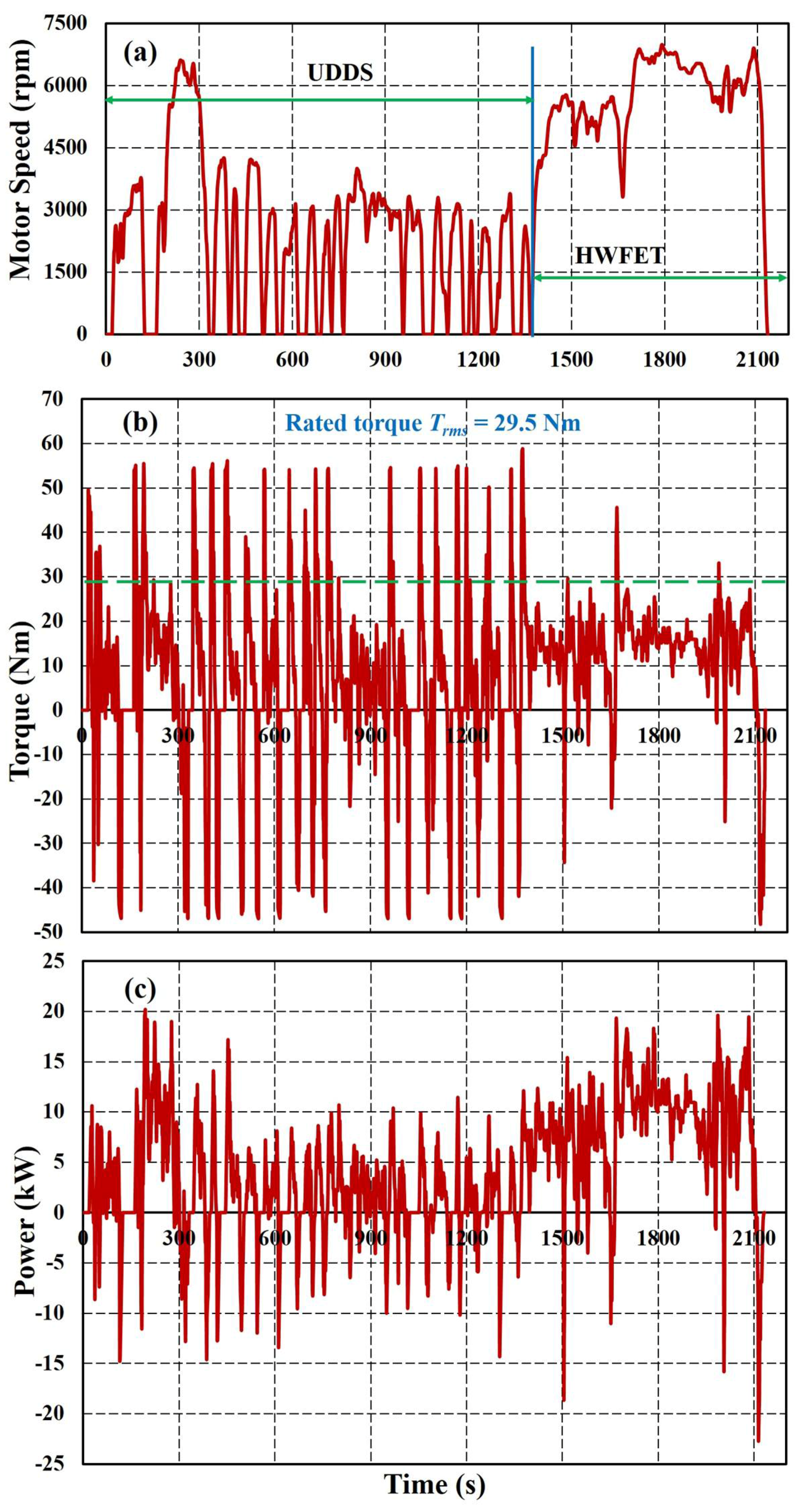
- The IPMSMs are more advantageous in urban driving because of their higher performance and efficiency at lower speed.
- -
- The PMa-SynRM is more suitable than the IPMSM in the highway driving cycle in terms of efficiency. However, the design should be improved by slightly increasing the PM amount so that the winding temperature can be brought down and the torque at high speed can be enhanced. This indicates a better design would lie between the two types of motors that are presented in this paper in terms of PM amount that is employed or sharing between the PM and reluctance torques. Moreover, better cooling may be necessary.
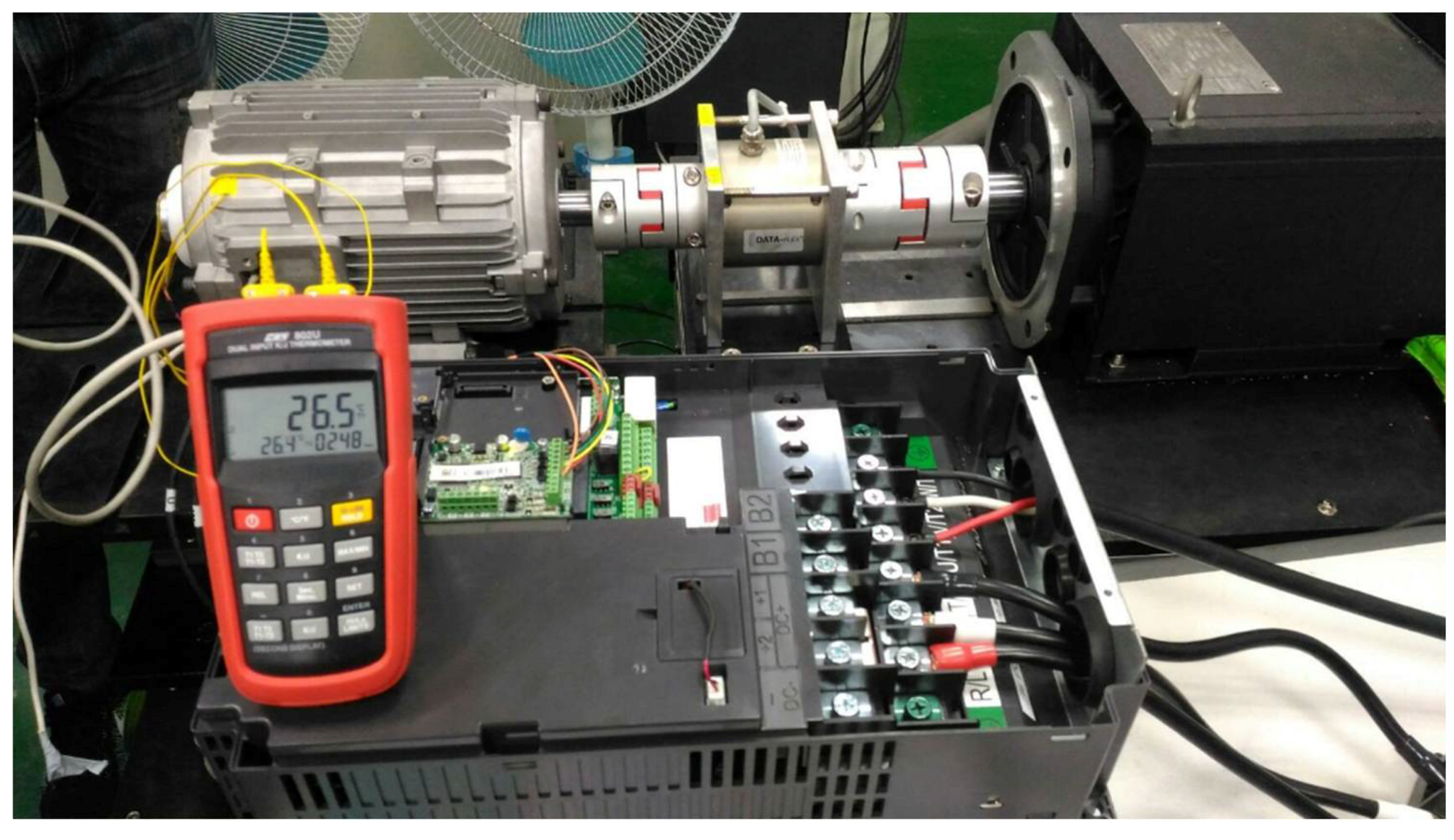
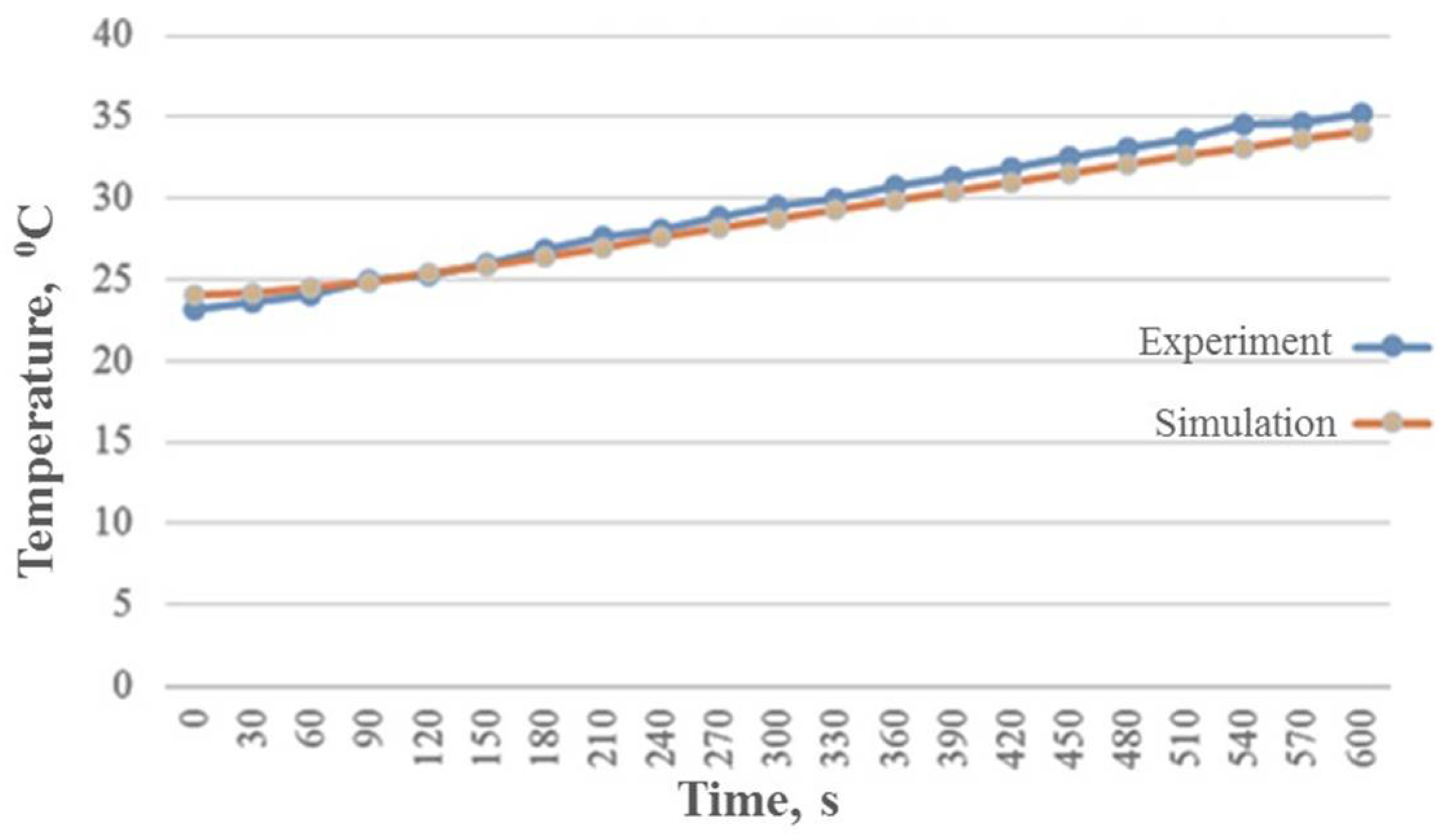
9. Experiments
10. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ruiwu, C.; Chris, M.; Ming, C. Quantitative Comparison of Flux-Switching Permanent-Magnet Motors with Interior Permanent Magnet Motor for EV, HEV, and PHEV Applications. IEEE Trans. Magn. 2012, 48, 2374–2384. [Google Scholar] [CrossRef]
- Won, H.; Hong, Y.K.; Lee, W.; Choi, M. Roles of coercivity and remanent flux density of permanent magnet in interior permanent magnet synchronous motor (IPMSM) performance for electric vehicle applications. AIP Adv. 2018, 8. [Google Scholar] [CrossRef]
- Mounir, Z.; Mohamed, B.; Demba, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. IEEE Trans. Veh. Technol. 2006, 55, 1756–1764. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Zhu, X.; Quan, L.; Du, Y.; Xiang, Z.; Zhu, X. Design and Analysis of a Hybrid Permanent Magnet Assisted Synchronous Reluctance Motor Considering Magnetic Saliency and PM Usage. IEEE Trans. Appl. Supercond. 2018, 28, 1–6. [Google Scholar] [CrossRef]
- Huynh, T.A.; Hsieh, M.-F. Comparative Study of PM-Assisted SynRM and IPMSM on Constant Power Speed Range for EV Applications. IEEE Trans. Magn. 2017, 53, 1–6. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, X.; Kais, A. Design Optimization of a Surface-Mounted Permanent-Magnet Motor with Concentrated Windings for Electric Vehicle Applications. IEEE Trans. Veh. Technol. 2013, 62, 1053–1064. [Google Scholar] [CrossRef]
- Degano, M.; Carraro, E.; Bianchi, N. Robust Optimization of a Traction PMASR Motor according to a Given Driving Cycles. In Proceedings of the IEEE International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 270–276. [Google Scholar] [CrossRef]
- Carraro, E.; Morandin, M.; Bianchi, N. Traction PMASR Motor Optimization according to a Given Driving Cycle. IEEE Trans. Ind. Appl. 2016, 52, 209–216. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Hoang, E.; Gabsi, M. Performance Synthesis of Permanent-Magnet Synchronous Machines during the Driving Cycle of a Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2011, 60, 1991–1997. [Google Scholar] [CrossRef]
- Sarigiannidis, A.G.; Beniakar, M.E.; Kladas, A.G. Fast Adaptive Evolutionary PM Traction Motor Optimization Based on Electric Vehicle Drive Cycle. IEEE Trans. Veh. Technol. 2017, 66, 5762–5774. [Google Scholar] [CrossRef]
- Sarigiannidis, A.G.; Beniakar, M.E.; Kakosimos, P.E.; Kladas, A.G. Performance Evaluation and Thermal Analysis of Interior Permanent Magnet Traction Motor over a Wide Load Range. In Proceedings of the IEEE International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2662–2668. [Google Scholar] [CrossRef]
- Yang, Y.P.; Shih, G.Y. Optimal Design of an Axial-Flux Permanent-Magnet Motor for an Electric Vehicle Based on Driving Scenarios. Energies 2016, 9, 285. [Google Scholar] [CrossRef]
- Gu, W.; Zhu, X.-Y.; Li, Q.; Yi, D. Design and Optimization of Permanent Magnet Brushless Machines for Electric Vehicle Applications. Energies 2015, 8, 13996–14008. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using thermal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnostics of stator faults of the single-phase induction motor using thermal images, MoASoS and selected classifiers. Measurement 2016, 93, 86–93. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency, EPA Emission Standards for Light-Duty Vehicles and Trucks. Available online: https://www.epa.gov/emission-standards-reference-guide/epa-emission-standards-light-duty-vehicles-and-trucks (accessed on 30 April 2018).
- Liu, X.; Chen, H.; Zhao, J.; Belahcen, A. Research on the Performances and Parameters of Interior PMSM Used for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3533–3545. [Google Scholar] [CrossRef]
- Liu, C.T.; Chung, H.Y.; Lin, S.Y. On the electromagnetic steel selections and performance impact assessments of synchronous reluctance motors. IEEE Trans. Ind. Appl. 2017, 53, 2569–2577. [Google Scholar] [CrossRef]
- Huynh, T.A.; Hsieh, M.-F. Performance Evaluation of Interior Permanent Magnet Motors Using Thin Electrical Steels. IEEJ J. Ind. Appl. 2017, 6, 422–428. [Google Scholar] [CrossRef]
- Yuan, X.; Wang, J. Torque Distribution Strategy for a Front- and Rear-Wheel-Driven Electric Vehicle. IEEE Trans. Veh. Technol. 2012, 61, 3365–3374. [Google Scholar] [CrossRef]
- Soong, W.L.; Ertugrul, N. Field weakening performance of interior permanent magnet motors. IEEE Trans. Ind. Appl. 2002, 38, 1251–1258. [Google Scholar] [CrossRef]
- Guglielmi, P.; Boazzo, B.; Armando, E.; Pellegrino, G.; Vagati, A. Permanent-magnet minimization in PM-assisted synchronous reluctance motors for wide speed range. IEEE Trans. Ind. Appl. 2013, 49, 31–41. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Unit) | Double Layers | V-Shaped | PMa-SynRM |
|---|---|---|---|
| Max. power (kW) | 10 | 10 | 10 |
| Max. torque (Nm) | 56 | 56 | 65 |
| Max. speed (rpm) | 7000 | 7000 | 7000 |
| Rated power (kW) | 6.6 | 6.6 | 6.6 |
| Rated torque (Nm) | 30 | 30 | 30 |
| Base speed @ maximum torque (rpm) | ≥1800 | ≥1800 | ≥1500 |
| Base speed @ rated torque (rpm) | ≥2100 | ≥2100 | ≥2100 |
| No. of slots | 36 | 36 | 36 |
| No. of poles | 8 | 8 | 4 |
| No. of turns | 4 | 5 | 6 |
| Max. current (A) | 110 | 100 | 80 |
| Outer rotor diameter (mm) | 94 | 109 | 94 |
| Stack length (mm) | 86 | 90 | 120 |
| Coil pitch | 4 | 3 | 9 |
| PM amount per pole (mm3) | 7740 | 8100 | 5760 |
| Current density @ rated torque (A/mm2) | 8.3 | 8.3 | 8.3 |
| Parameter (Unit) | Value |
|---|---|
| Radius of wheels (m) | 0.265 |
| Vehicle mass (kg) | 950 |
| Mass correction coefficient | 1.04 |
| Gravitational acceleration (m/s2) | 9.8 |
| Rolling resistance coefficient | 0.011 |
| Air mass density (kg/m3) | 1.225 |
| Aerodynamic drag coefficient | 0.4 |
| Vehicle frontal area (m2) | 2.14 |
| Differential gear ratio | 7 |
| Battery pack nominal voltage (V) | 310 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, T.A.; Hsieh, M.-F. Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles. Energies 2018, 11, 1385. https://doi.org/10.3390/en11061385
Huynh TA, Hsieh M-F. Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles. Energies. 2018; 11(6):1385. https://doi.org/10.3390/en11061385
Chicago/Turabian StyleHuynh, Thanh Anh, and Min-Fu Hsieh. 2018. "Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles" Energies 11, no. 6: 1385. https://doi.org/10.3390/en11061385
APA StyleHuynh, T. A., & Hsieh, M. -F. (2018). Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles. Energies, 11(6), 1385. https://doi.org/10.3390/en11061385