Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage



Abstract
:1. Introduction
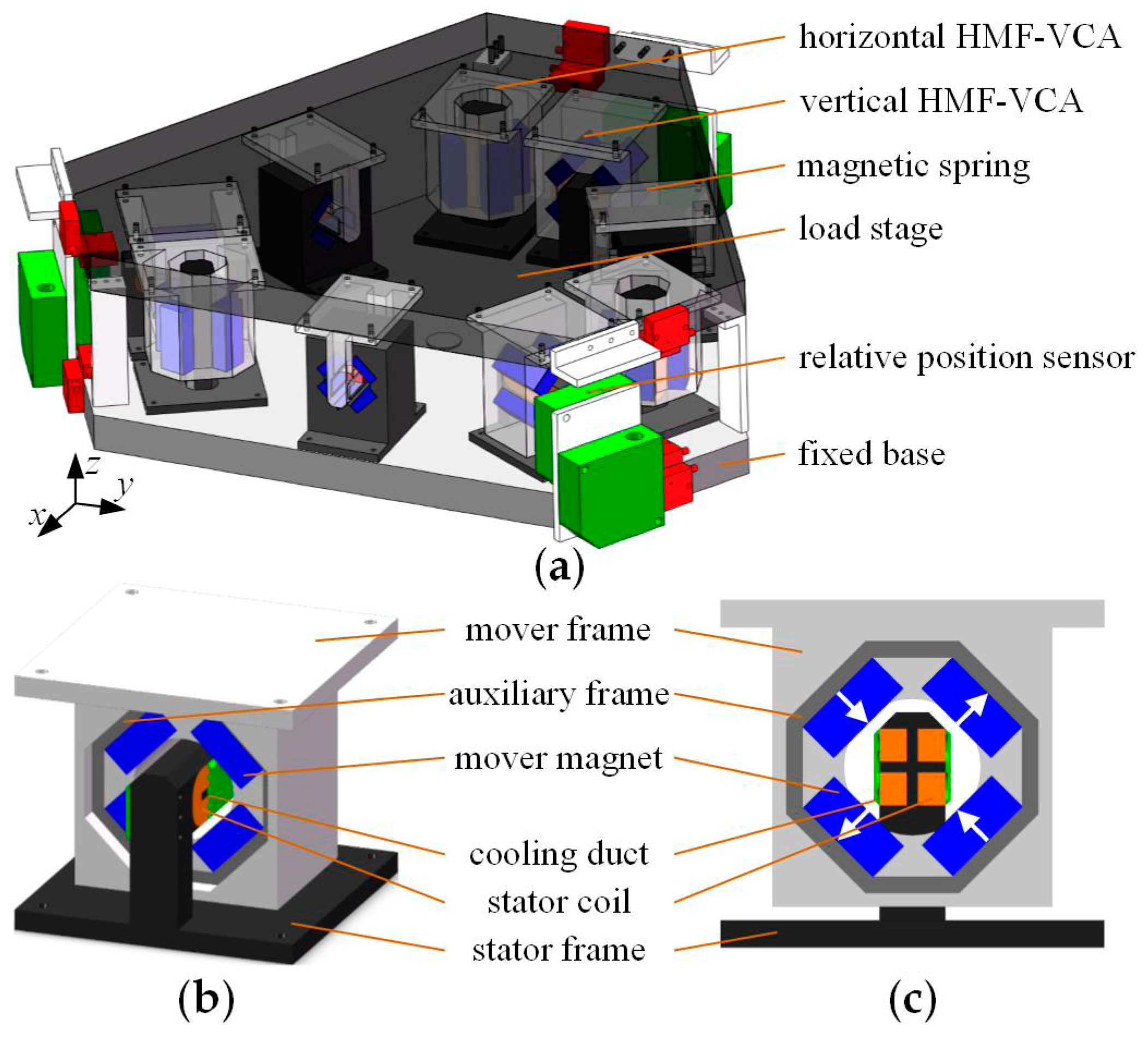
2. Basic Structure and Operating Principle
2.1. Basic Structure
2.2. Operating Principles
3. Characteristics Analysis and Optimization
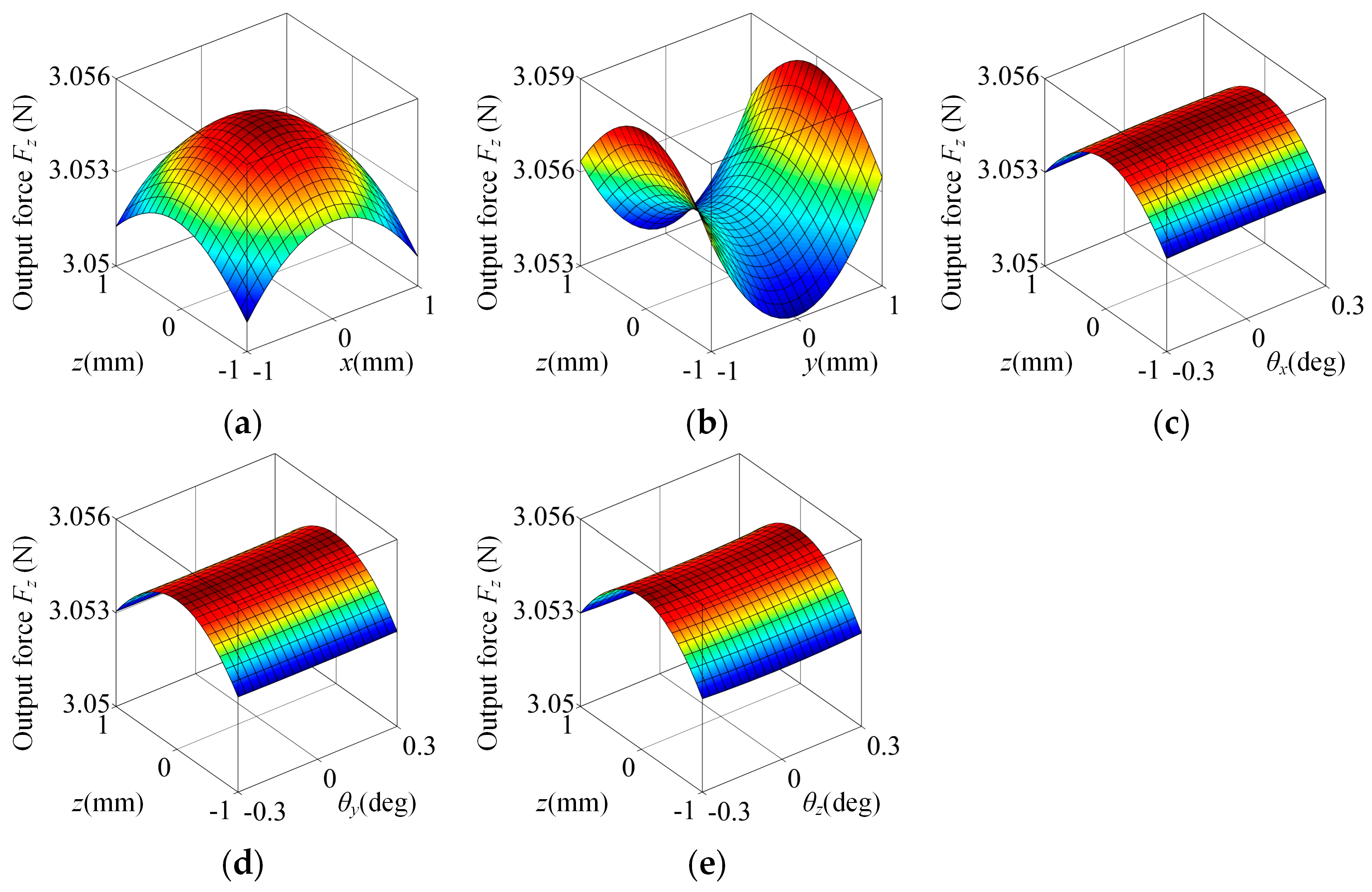
3.1. Output Force
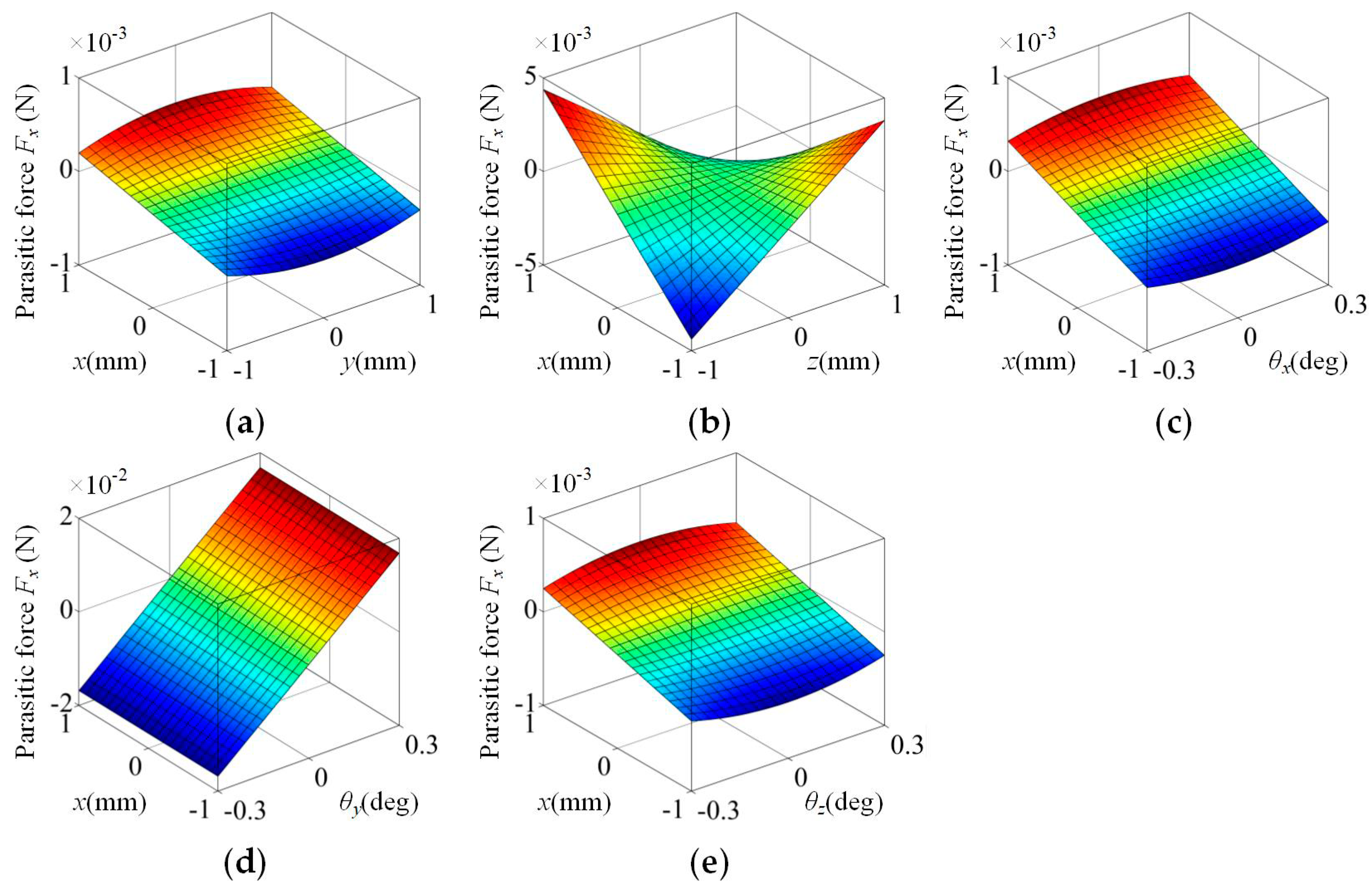
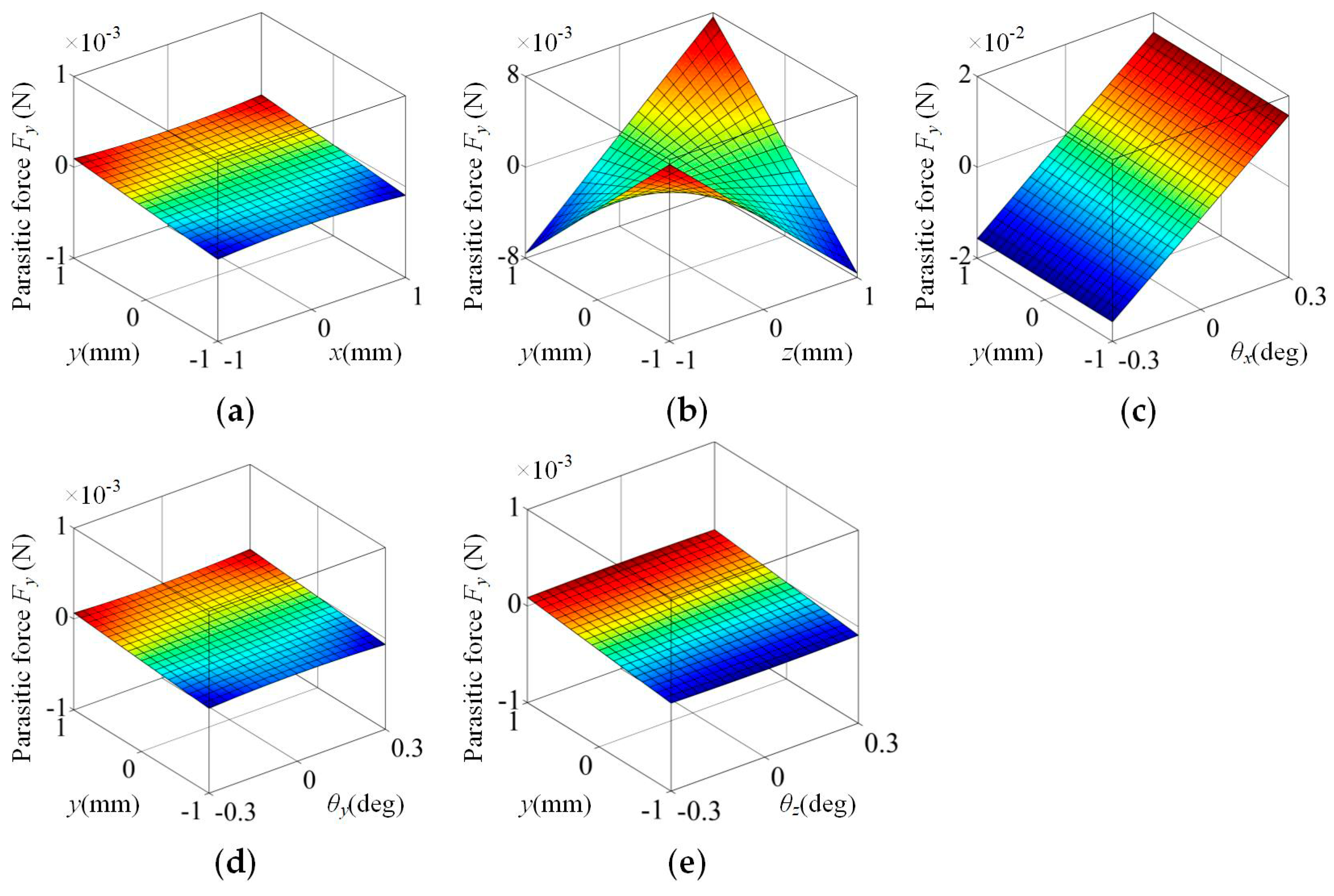
3.2. Parasitic Force
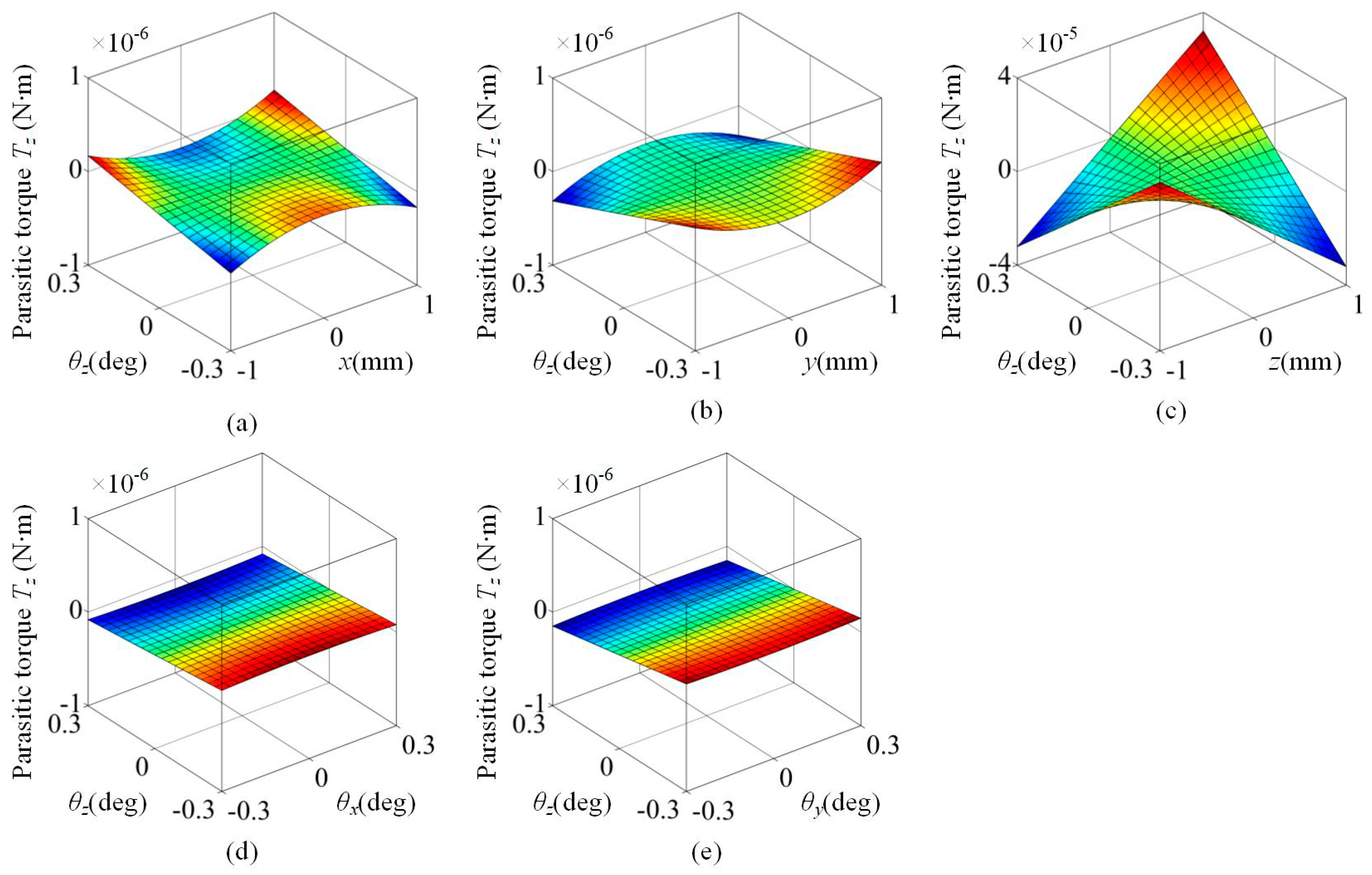
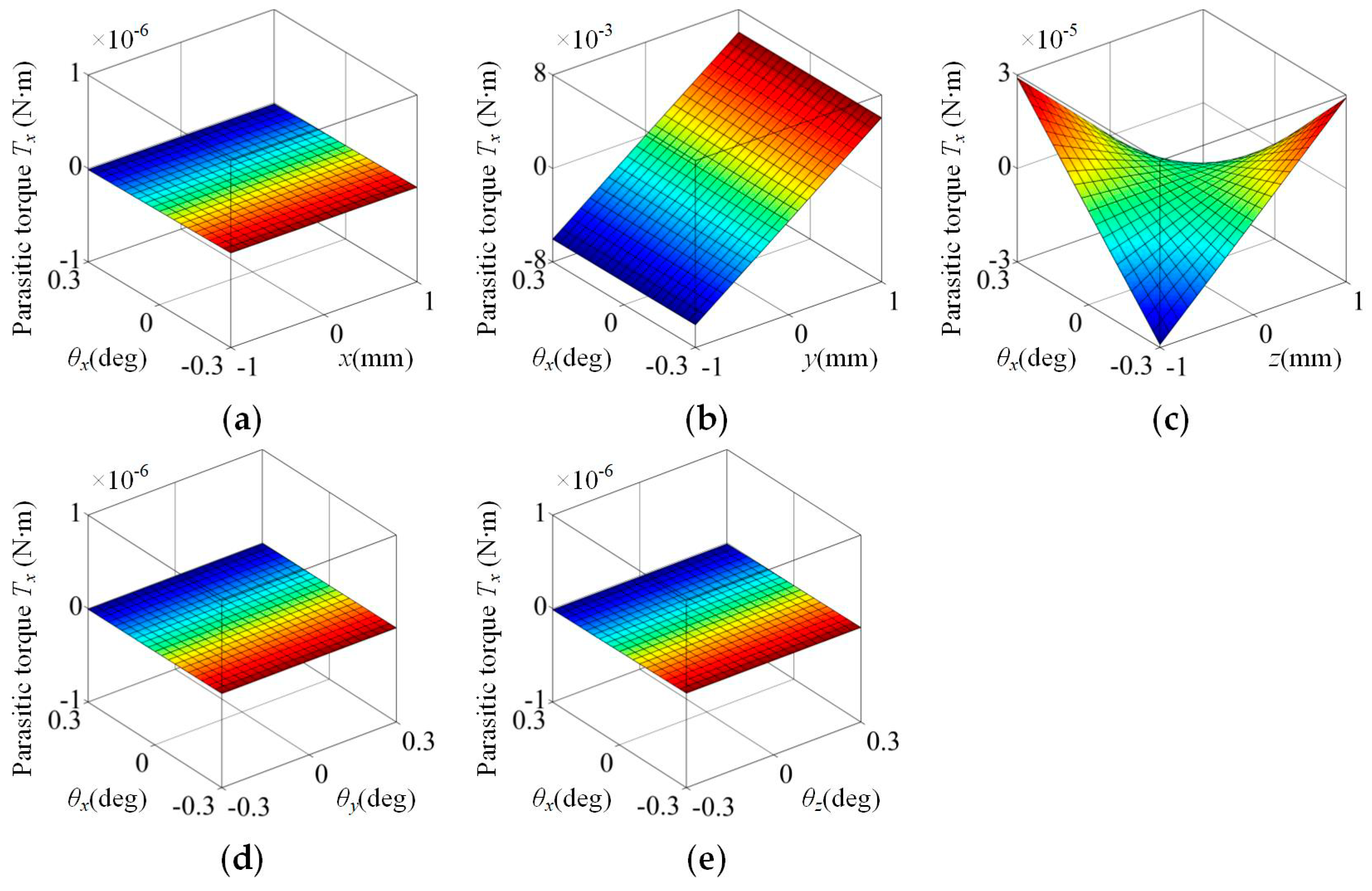
3.3. Parasitic Torque
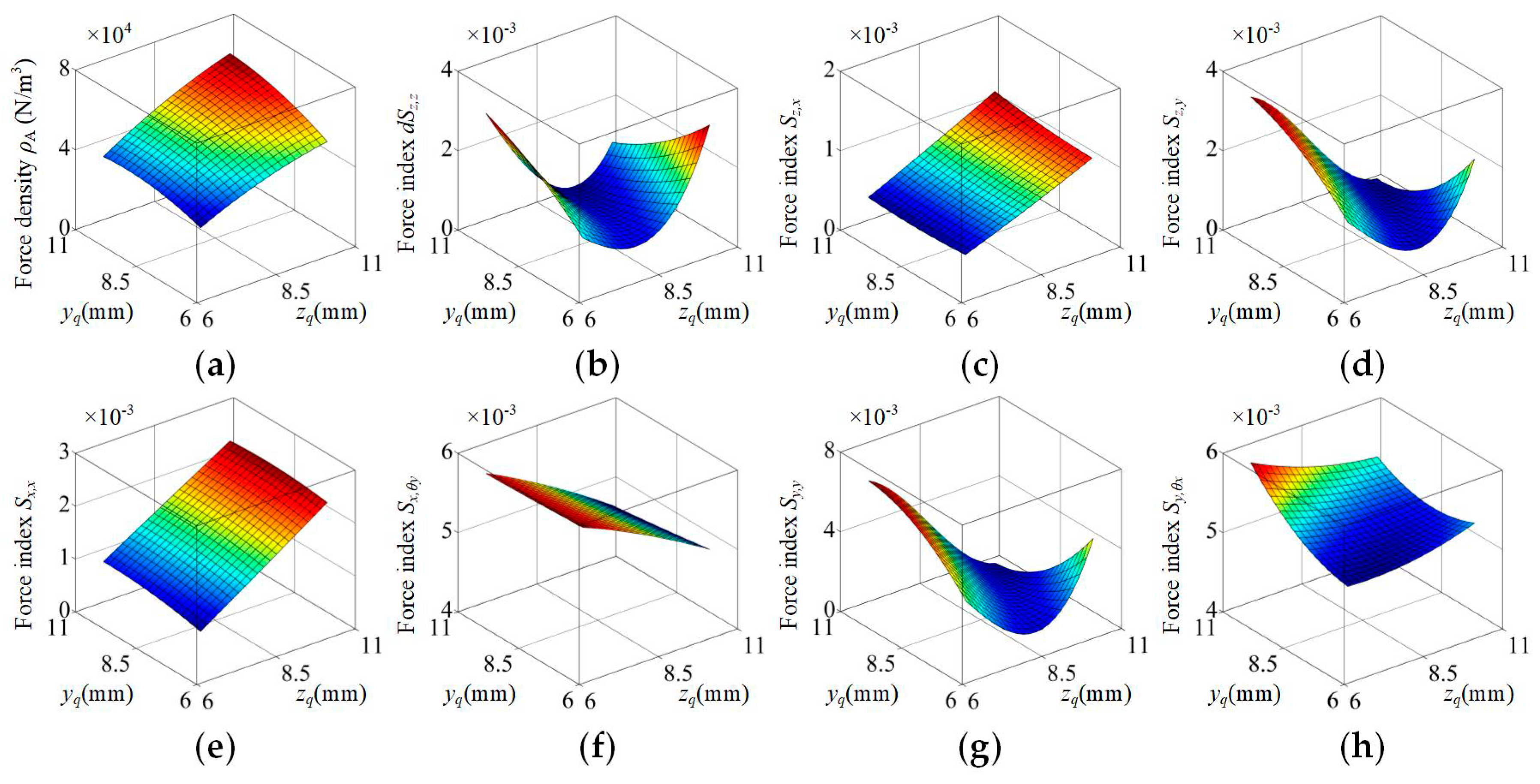
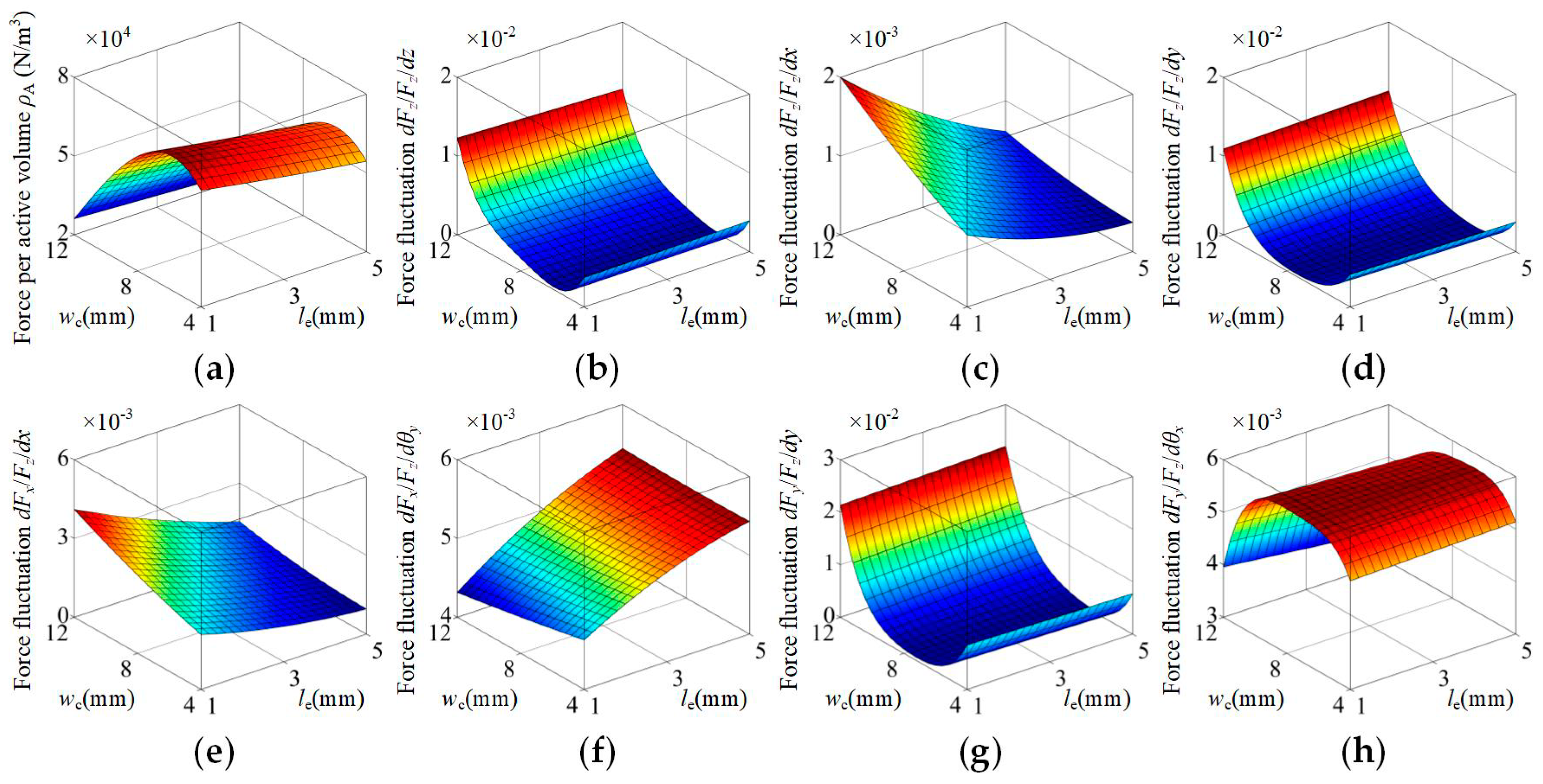
3.4. Parametric Analysis
4. Performance Test and Comparison
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rovers, J.M.M.; Jansen, J.W.; Compter, J.C.; Lomonova, E.A. Analysis method of the dynamic force and torque distribution in the magnet array of a commutated magnetically levitated planar actuator. IEEE Trans. Ind. Electron. 2012, 59, 2157–2166. [Google Scholar] [CrossRef]
- Xu, Q. Design and development of a compact flexure-based XY precision positioning system with centimeter range. IEEE Trans. Ind. Electron. 2014, 61, 893–903. [Google Scholar] [CrossRef]
- Zhang, H.; Kou, B.; Zhang, H.; Jin, Y. A three-degree-of-freedom short-stroke Lorentz-force-driven planar motor using a Halbach permanent-magnet array with unequal thickness. IEEE Trans. Ind. Electron. 2015, 62, 3640–3650. [Google Scholar] [CrossRef]
- Valiente-Blanco, I.; Diez-Jimenez, E.; Sanchez-Garcia-Casarrubios, J.; Perez-Diaz, J.L. Improving Resolution and Run Outs of a Superconducting Noncontact Device for Precision Positioning. IEEE-ASME Trans. Mechatron. 2015, 20, 1992–1996. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Valiente-Blanco, I.; Diez-Jimenez, E.; Sanchez-Garcia-Casarrubios, J. Superconducting Non-Contact Device for Precision Positioning in Cryogenic Environments. IEEE-ASME Trans. Mechatron. 2014, 19, 598–605. [Google Scholar] [CrossRef]
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. A survey of control issues in nanopositioning. IEEE Trans. Control Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Xie, Y.; Tan, Y.; Dong, R. Nonlinear modeling and decoupling control of XY micropositioning stages with piezoelectric actuators. IEEE-ASME Trans. Mechatron. 2013, 18, 821–832. [Google Scholar] [CrossRef]
- Ueda, Y.; Ohsaki, H. A planar actuator with a small mover traveling over large yaw and translational displacements. IEEE Trans. Magn. 2008, 44, 609–616. [Google Scholar] [CrossRef]
- Zhu, H.; Teo, T.J.; Pang, C.K. Design and modeling of a six-degree-of-freedom magnetically levitated positioner using square coils and 1-D Halbach arrays. IEEE Trans. Ind. Electron. 2017, 64, 440–450. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, Y.; Yang, K.; Hu, C.; Yu, D. A data-driven iterative decoupling feedforward control strategy with application to an ultraprecision motion stage. IEEE Trans. Ind. Electron. 2015, 62, 620–627. [Google Scholar] [CrossRef]
- Fung, R.F.; Hsu, Y.L.; Huang, M.S. System identification of a dual-stage XY precision positioning table. Precis. Eng. 2009, 33, 71–80. [Google Scholar] [CrossRef]
- Choi, Y.M.; Gweon, D.G. A high-precision dual-servo stage using Halbach linear active magnetic bearings. IEEE-ASME Trans. Mechatron. 2011, 16, 925–931. [Google Scholar] [CrossRef]
- Shan, X.; Kuo, S.K.; Zhang, J.; Menq, C.H. Ultra precision motion control of a multiple degrees of freedom magnetic suspension stage. IEEE-ASME Trans. Mechatron. 2002, 7, 67–78. [Google Scholar] [CrossRef]
- Chen, M.Y.; Lin, T.B.; Hung, S.K.; Fu, L.C. Design and experiment of a macro–micro planar maglev positioning system. IEEE Trans. Ind. Electron. 2012, 59, 4128–4139. [Google Scholar] [CrossRef]
- Kuo, S.K.; Meng, C.H. Modeling and control of a six-axis precision motion control stage. IEEE-ASME Trans. Mechatron. 2005, 10, 50–59. [Google Scholar] [CrossRef]
- Verma, S.; Kim, W.J.; Shakir, H. Multi-axis maglev nanopositioner for precision manufacturing and manipulation applications. IEEE Trans. Ind. Appl. 2005, 41, 1159–1167. [Google Scholar] [CrossRef]
- Verma, S.; Shakir, H.; Kim, W.J. Novel electromagnetic actuation scheme for multiaxis nanopositioning. IEEE Tran. Magn. 2006, 42, 2052–2062. [Google Scholar] [CrossRef]
- Vrijsen, N.H.; Jansen, J.W.; Lomonova, E.A. Comparison of linear voice coil and reluctance actuators for high-precision applications. In Proceedings of the 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010, Ohrid, Macedonia, 6–8 September 2010. [Google Scholar]
- Zhou, Y.; Kou, B.; Zhang, H.; Luo, J.; Gan, L. Force Characteristic Analysis of a Linear Magnetic Bearing with Rhombus Magnet Array for Magnetic Levitation Positioning System. IEEE Trans. Magn. 2017, 53, 6500407. [Google Scholar] [CrossRef]
- Kremers, M.F.; Paulides, J.J.; Ilhan, E.; Janssen, J.L.; Lomonova, E.A. Relative Permeability in a 3D Analytical Surface Charge Model of Permanent Magnets. IEEE Trans. Magn. 2013, 49, 2299–2302. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Data |
|---|---|---|
| lm | length of mover magnet | 40 mm |
| wm | width of mover magnet | 18 mm |
| tm | thickness of mover magnet | 8 mm |
| yq | position of mover magnet in the y axis | 8 mm |
| zq | position of mover magnet in the z axis | 8 mm |
| θ | inclined angle of mover magnet | 45° |
| lc | length of stator coil | 60 mm |
| wc | width of stator coil | 6 mm |
| tc | thickness of stator coil | 5 mm |
| ls | adjustable length of stator coil | 4 mm |
| ws | width of space between stator coils | 2 mm |
| ts | thickness of space between stator coils | 2 mm |
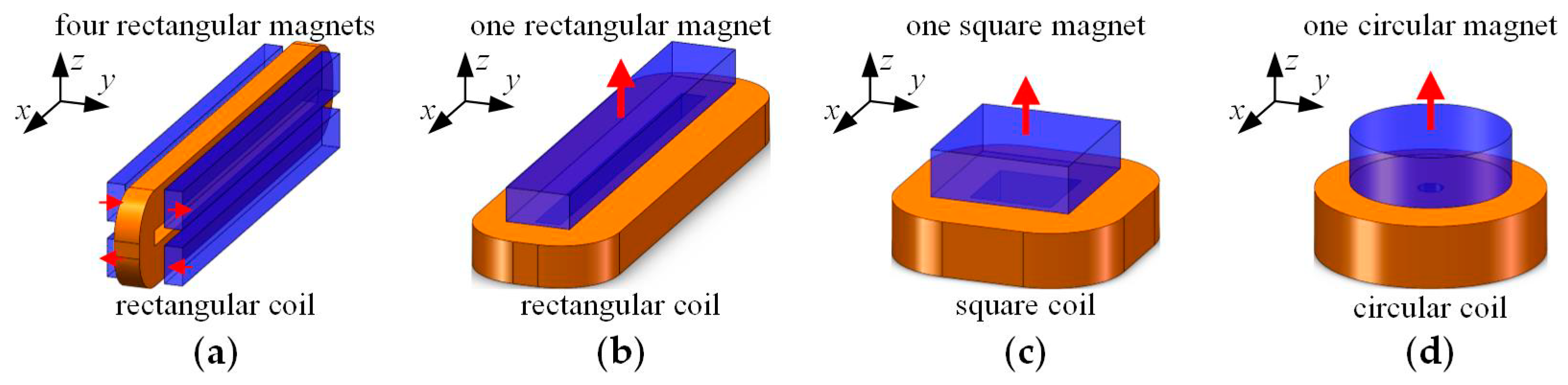
| Output and Parasitic Force and Torque Characteristic | HMF-VCA | VCA Four Rectangular Magnets | VCA One Rectangular Magnet | VCA One Square Magnet | VCA One Circular Magnet |
|---|---|---|---|---|---|
| Variation of Fz caused by z, θz | 0.018% | 1.6% | 1.3% | 8% | ≈8% |
| Variation of Fz caused by θx, θy | 0.001% | 0.05% | - | 0.0005% | ≈0.0005% |
| Variation of Fx caused by x, y | 0.006% | - | 9% | 4% | ≈4% |
| Variation of Fx caused by θx, θy | 0.55% | 0.17% | - | 0.6% | ≈0.6% |
| Variation of Fy caused by θx, θy | 0.51% | 0.27% | - | 4% | ≈4% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Kou, B.; Zhang, H.; Zhang, L.; Wang, L. Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage. Energies 2019, 12, 1830. https://doi.org/10.3390/en12101830
Zhou Y, Kou B, Zhang H, Zhang L, Wang L. Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage. Energies. 2019; 12(10):1830. https://doi.org/10.3390/en12101830
Chicago/Turabian StyleZhou, Yiheng, Baoquan Kou, He Zhang, Lu Zhang, and Likun Wang. 2019. "Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage" Energies 12, no. 10: 1830. https://doi.org/10.3390/en12101830
APA StyleZhou, Y., Kou, B., Zhang, H., Zhang, L., & Wang, L. (2019). Design, Analysis and Test of a Hyperbolic Magnetic Field Voice Coil Actuator for Magnetic Levitation Fine Positioning Stage. Energies, 12(10), 1830. https://doi.org/10.3390/en12101830