Automatic Coordination of Internet-Connected Thermostats for Power Balancing and Frequency Control in Smart Microgrids

Abstract
:1. Introduction
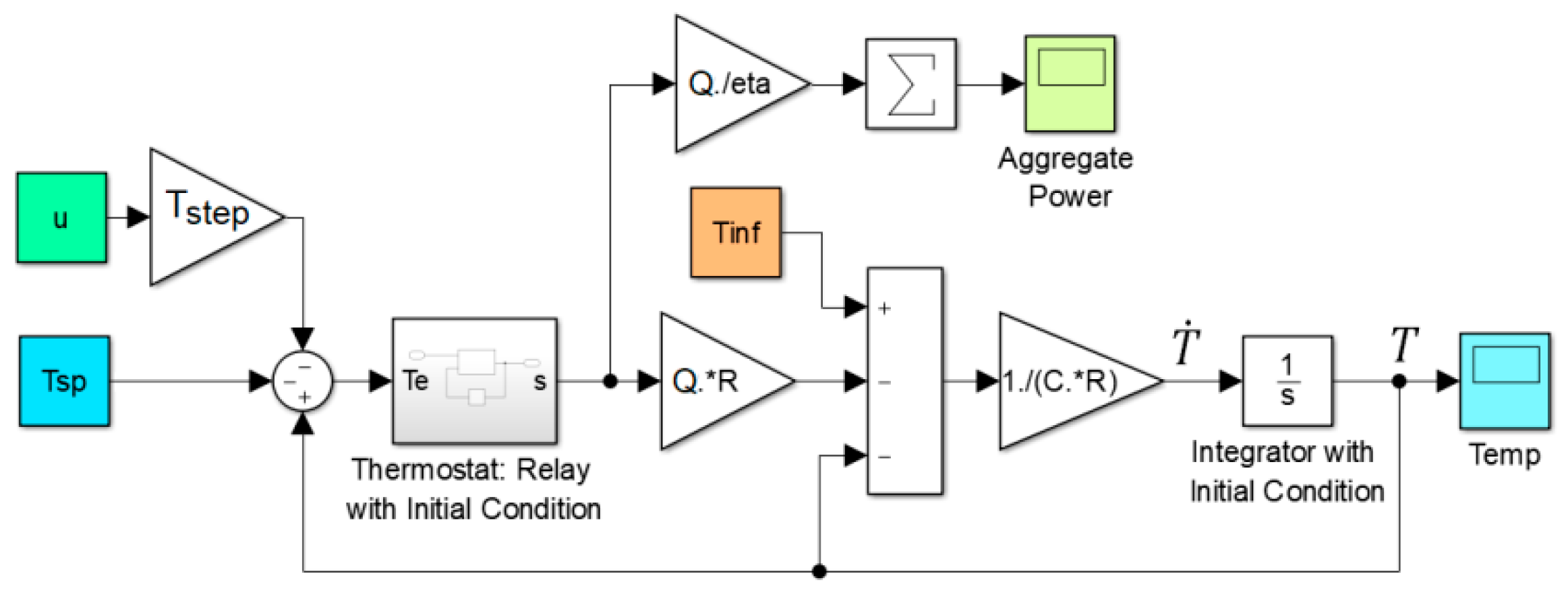
2. Aggregate AC Load Model
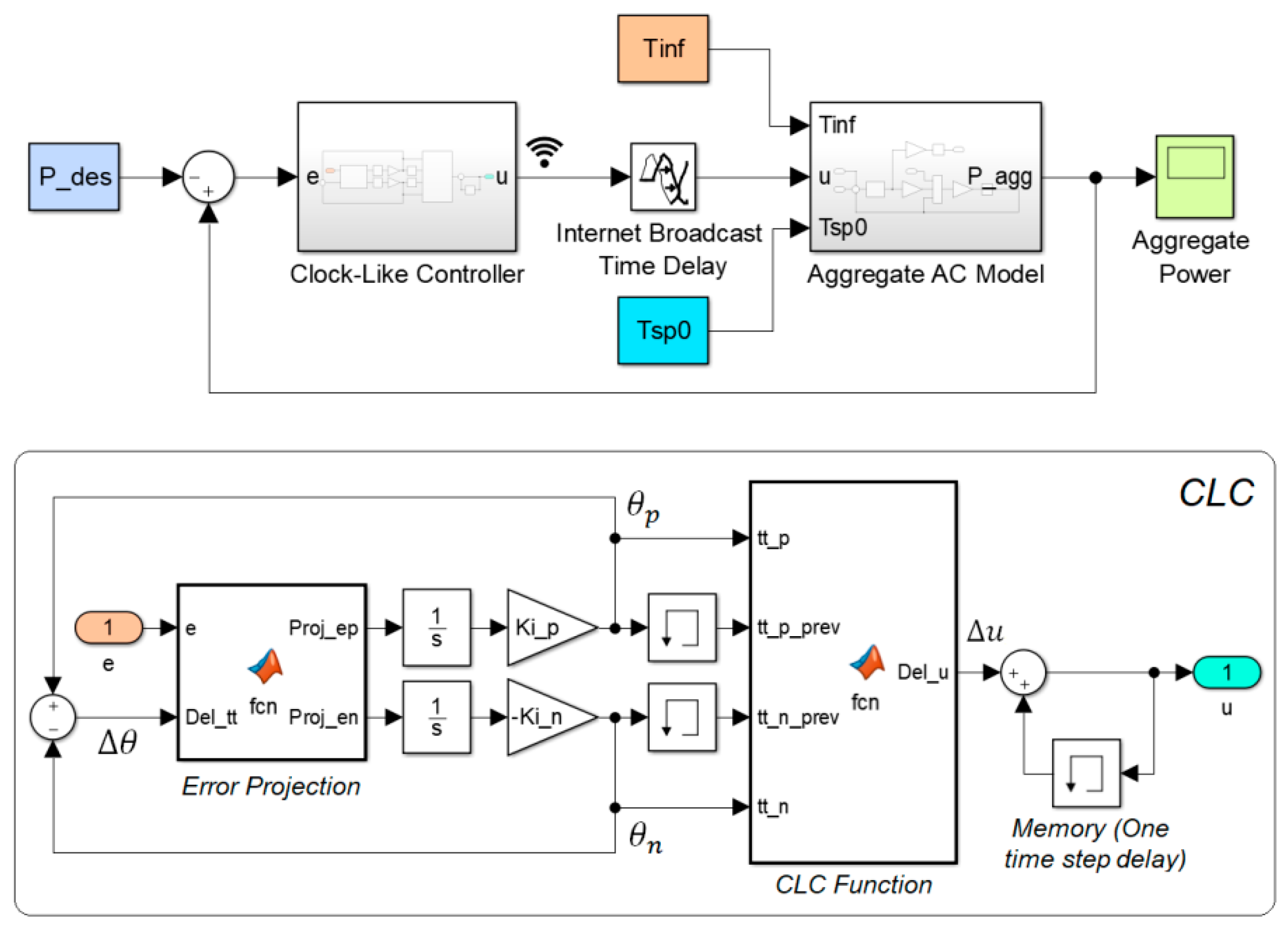
3. Aggregate Power Control using Clock-Like-Controller
3.1. Feedback Control Formulation Using the CLC Method
3.2. Accounting for End-User Comfort
3.3. CLC Simulations
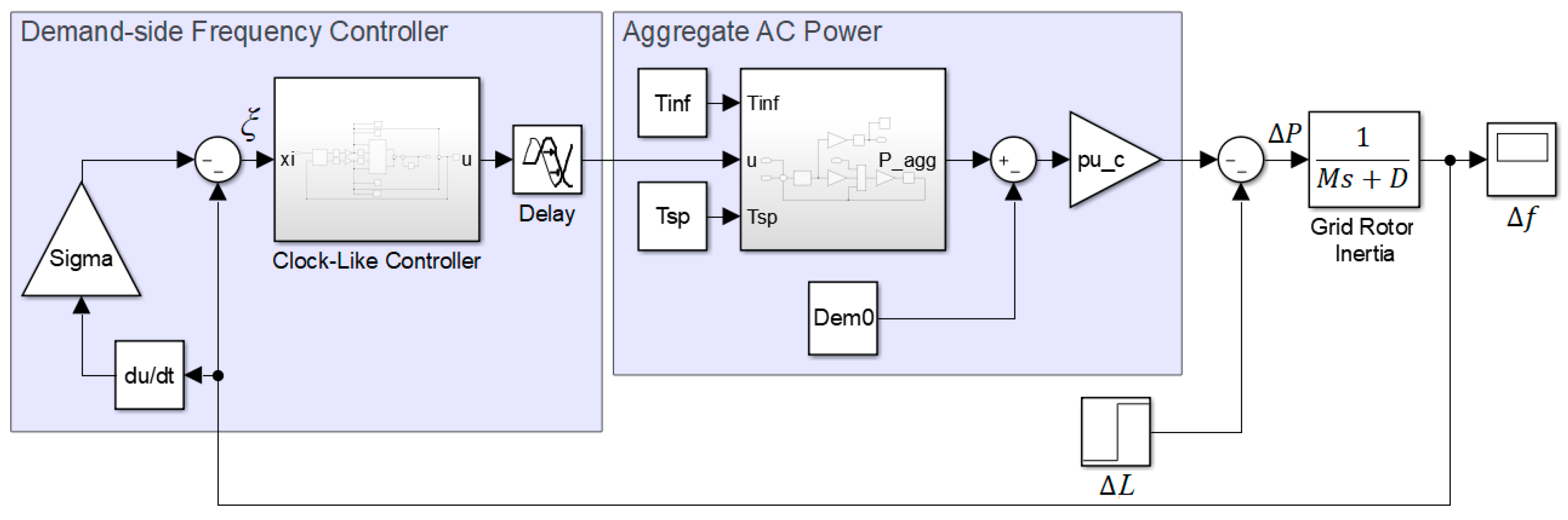
4. Microgrid Frequency Control using AGC and CLC
4.1. Automatic Generation Control Model
4.2. Clock-Like Frequency Controller (CLFC) for Thermostatic Loads
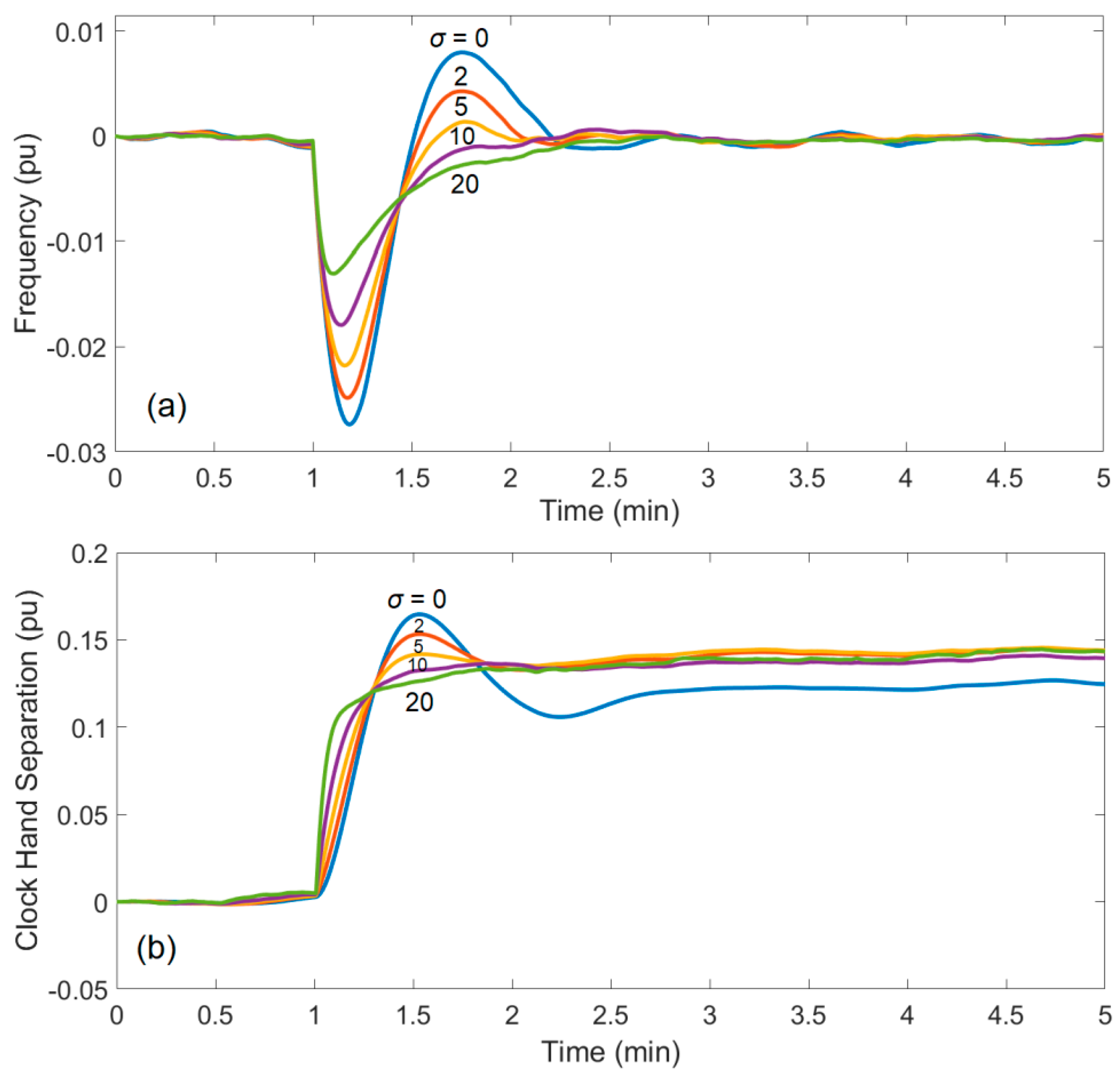
4.3. Simultaneous Generation and Demand Control
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Description | Symbol | Description |
| i | AC unit index | Tmax | Upper thermostatic temperature limit |
| k | Discrete time index | Tmin | Lower thermostatic temperature limit |
| n | Negative variable index | Tsp | Setpoint temperature |
| p | Positive variable index | Tsp0 | User-specified setpoint temperature |
| e | Power tracking error | Tstep | Setpoint temperature step |
| Thermostatic switching state | T∞ | Ambient temperature | |
| t | Time | α | Convergence rate of clock hands |
| z | AC unit index pointed by clock hand | σ | Control parameter |
| C | Thermal capacitance | θ | Clock hand angle |
| Ki | Integral control gain | εf | Frequency error threshold |
| NAC | Total number of AC units | ξ | Modified frequency error signal |
| PDem | Power demand | Thermostatic deadband temperature | |
| PSup | Power supply | η | Coefficient of performance |
| Q | Energy transfer rate | Δf | Grid frequency error |
| Thermal resistance | Δt | Time step | |
| T | Indoor room temperature | Δu | Setpoint temperature offset coefficient |
References
- Wang, Z.; Tang, Y.; Chen, X.; Men, X.; Cao, J.; Wang, H. Optimized daily dispatching strategy of building integrated energy systems considering vehicle to grid technology and room temperature control. Energies 2018, 11, 1287. [Google Scholar] [CrossRef]
- Callaway, D.S.; Hiskens, I.A. Achieving controllability of electric loads. Proc. IEEE 2011, 99, 184–199. [Google Scholar] [CrossRef]
- Callaway, D.S. Tapping the energy storage potential in electric loads to deliver load following and regulation, with application to wind energy. Energy Convers. Manag. 2009, 50, 1389–1400. [Google Scholar] [CrossRef]
- Bashash, S.; Fathy, H.K. Modeling and control of aggregate air conditioning loads for robust renewable power management. IEEE Trans. Control Syst. Technol. 2013, 21, 1318–1327. [Google Scholar] [CrossRef]
- Gustafson, M.W.; Baylor, J.S.; Epstein, G. Direct water heater load control. Estimating program effectiveness using an engineering model. IEEE Trans. Power Syst. 1993, 8, 137–143. [Google Scholar] [CrossRef]
- Ericson, T. Direct load control of residential water heaters. Energy Policy 2009, 37, 3502–3512. [Google Scholar] [CrossRef] [Green Version]
- Short, J.; Infield, D.G.; Freris, L.L. Stabilization of grid frequency through dynamic demand control. IEEE Trans. Power Syst. 2007, 22, 1284–1293. [Google Scholar] [CrossRef]
- Olama, M.M.; Kuruganti, T.; Nutaro, J.; Dong, J. Coordination and control of building HVAC systems to provide frequency regulation to the electric grid. Energies 2018, 11, 1852. [Google Scholar] [CrossRef]
- Bashash, S.; Fathy, H.K. Power grid stabilization through setpoint temperature control of frequency-responsive air conditioning loads. In Proceedings of the 2012 ASME Dynamic Systems and Control Conference, Fort Lauderdale, FL, USA, 17–19 October 2012. [Google Scholar]
- Risbeck, M.J.; Maravelias, C.T.; Rawlings, J.B.; Turney, R.D. Cost optimization of combined building heating/cooling equipment via mixed-integer linear programming. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 1689–1694. [Google Scholar]
- Werminski, S.; Jarnut, M.; Benysek, G.; Bojarski, J. Demand side management using DADR automation in the peak load reduction. Renew. Sustain. Energy Rev. 2017, 67, 998–1007. [Google Scholar] [CrossRef]
- Chan, K.; Bashash, S. Modeling and energy cost optimization of air conditioning loads in smart grid environments. In Proceedings of the 2017 Dynamic Systems and Control Conference, Tysons, VA, USA, 11–13 October 2017. [Google Scholar]
- Bhattacharya, S.; Kar, K.; Chow, J.H. Economic operation of thermostatic loads under time varying prices: An optimal control approach. IEEE Trans. Sustain. Energy 2018. [Google Scholar] [CrossRef]
- Almassalkhi, M.; Frolik, J.; Hines, P. Packetized energy management: Asynchronous and anonymous coordination of thermostatically controlled loads. In Proceedings of the 2017 American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 1431–1437. [Google Scholar]
- Espinosa, L.A.D.; Almassalkhi, M.; Hines, P.; Frolik, J. System properties of packetized energy management for aggregated diverse resources. In Proceedings of the IEEE Power Systems Computation Conference, Dublin, Ireland, 11–15 June 2018. [Google Scholar]
- Halder, A.; Geng, X.; Kumar, P.R.; Xie, L. Architecture and algorithms for privacy preserving thermal inertial load management by a load serving entity. IEEE Trans. Power Syst. 2017, 32, 3275–3286. [Google Scholar] [CrossRef]
- Malhamé, R.; Chong, C.Y. Electric load model synthesis by diffusion approximation of a high-order hybrid-state stochastic system. IEEE Trans. Autom. Control 1985, 30, 854–860. [Google Scholar] [CrossRef]
- Moura, S.; Ruiz, V.; Bendsten, J. Modeling heterogeneous populations of thermostatically controlled loads using diffusion-advection PDEs. In Proceedings of the 2013 ASME Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013. [Google Scholar]
- Perfumo, C.; Kofman, E.; Braslavsky, J.H.; Ward, J.K. Load management: Model-based control of aggregate power for populations of thermostatically controlled loads. Energy Convers. Manag. 2012, 55, 36–48. [Google Scholar] [CrossRef] [Green Version]
- Mahdavi, N.; Braslavsky, J.H.; Perfumo, C. Mapping effect of ambient temperature on the power demand of populations of air conditioners. IEEE Trans. Smart Grid 2016, 9, 1540–1550. [Google Scholar] [CrossRef]
- Lu, N.; Chassin, D.P.; Widergren, S.E. Modeling uncertainties in aggregated thermostatically controlled loads using a state queuing model. IEEE Trans. Power Syst. 2005, 20, 725–733. [Google Scholar] [CrossRef]
- Chen, Y.B.P.; Zhu, X.; Hu, M. The extended 2-dimensional state-queuing model for the thermostatically controlled loads. Electr. Power Energy Syst. 2019, 105, 323–329. [Google Scholar]
- Mathieu, J.L.; Koch, S.; Callaway, D.S. State estimation and control of electric loads to manage real-time energy imbalance. IEEE Trans. Power Syst. 2013, 28, 430–440. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1993; pp. 581–587. [Google Scholar]
- Khooban, M.H. Secondary load frequency control of time-delay stand-alone microgrids with electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 7416–7422. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Shasadeghi, M.; Dragicevic, T.; Blaabjerg, F. Load frequency control in microgrids based on a stochastic noninteger controller. IEEE Trans. Sustain. Energy 2018, 9, 853–861. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H.; Dragicevic, T. The future 5G network based secondary load frequency control in maritime microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Chekan, J.A.; Bashash, S. IoT-oriented demand-side energy management of thermostatically-controlled loads. In Proceedings of the 2017 American Control Conference, Seattle, WA, USA, 24–26 May 2017. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mean Value | Unit | Rel. Stand. Deviation |
|---|---|---|---|
| R, Thermal Resistance | 2 | °C/kW | 0.1 |
| C, Thermal Capacitance | 10 | kWh/°C | 0.1 |
| η, Coefficient of Performance | - | 0.0 | |
| δdb, Thermostat Deadband | 0.5 | °C | 0.0 |
| Q, Energy Transfer Rate | 14 | kW | 0.1 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| M | 10.0 s | D | 1.0 |
| Rs | 0.05 | Rh | 0.05 |
| TG | 0.2 s | TG,h | 0.2 s |
| FHP | 0.3 | RT | 0.38 |
| TRH | 7.0 s | TR | 5.0 s |
| TCH | 0.3 s | TW | 1.0 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bashash, S.; Lee, K.L. Automatic Coordination of Internet-Connected Thermostats for Power Balancing and Frequency Control in Smart Microgrids. Energies 2019, 12, 1936. https://doi.org/10.3390/en12101936
Bashash S, Lee KL. Automatic Coordination of Internet-Connected Thermostats for Power Balancing and Frequency Control in Smart Microgrids. Energies. 2019; 12(10):1936. https://doi.org/10.3390/en12101936
Chicago/Turabian StyleBashash, Saeid, and Kai Lun Lee. 2019. "Automatic Coordination of Internet-Connected Thermostats for Power Balancing and Frequency Control in Smart Microgrids" Energies 12, no. 10: 1936. https://doi.org/10.3390/en12101936
APA StyleBashash, S., & Lee, K. L. (2019). Automatic Coordination of Internet-Connected Thermostats for Power Balancing and Frequency Control in Smart Microgrids. Energies, 12(10), 1936. https://doi.org/10.3390/en12101936