Charging–Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle

Abstract
:1. Introduction
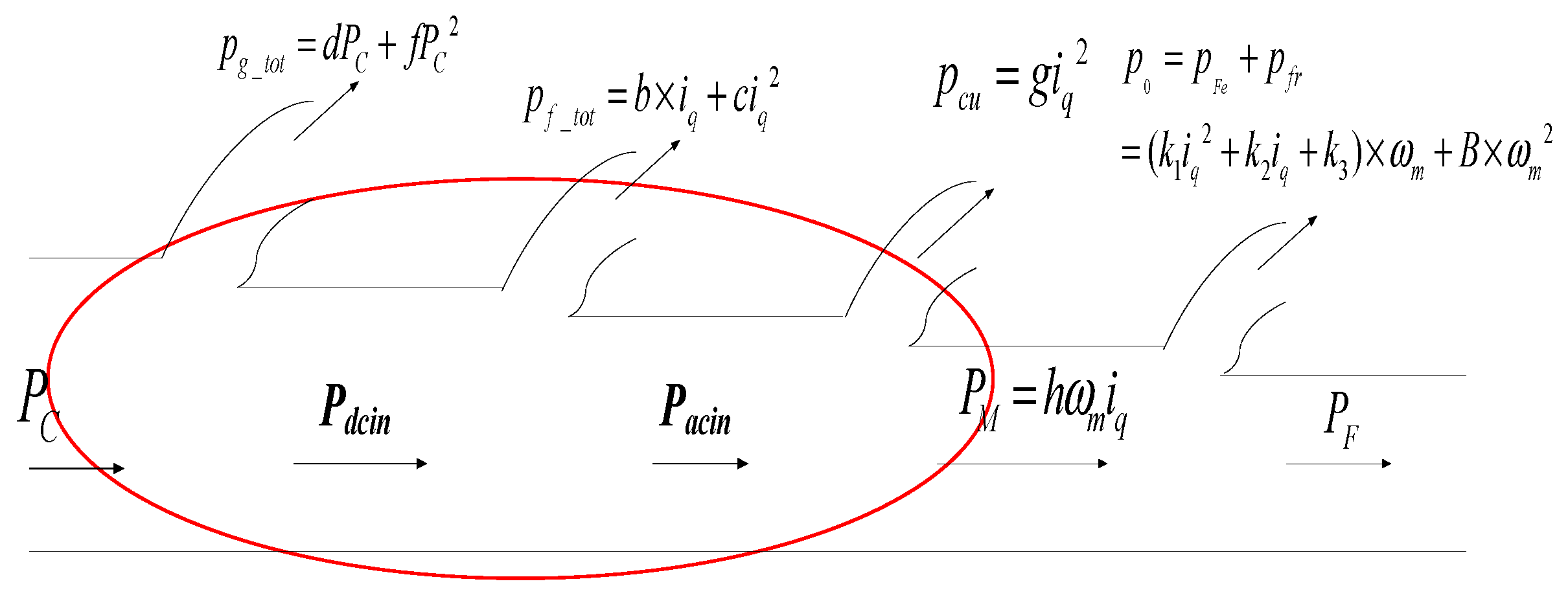
2. Loss Analysis of FESU
2.1. Loss Analysis of the Converter in the FESU
2.2. Motor Loss of FESU
2.3. Analysis of the Total Charging–Discharging Loss of the FESU
3. Charging Control Strategy of the FAESS
3.1. Charging Objective Function for the FAESS
3.2. Charging Constraints of FAESS
3.2.1. Equity Constraint
3.2.2. Inequity Constraints
3.3. Research of the Charging Control Method for FAESS
3.4. Implementation Scheme of Charging Control for FAESS
4. Discharging Control Strategy of the FAESS
4.1. Discharging Objective Function for the FAESS
4.2. Discharging Constraints of the FAESS
4.2.1. Equity Constraints
4.2.2. Inequity Constraints
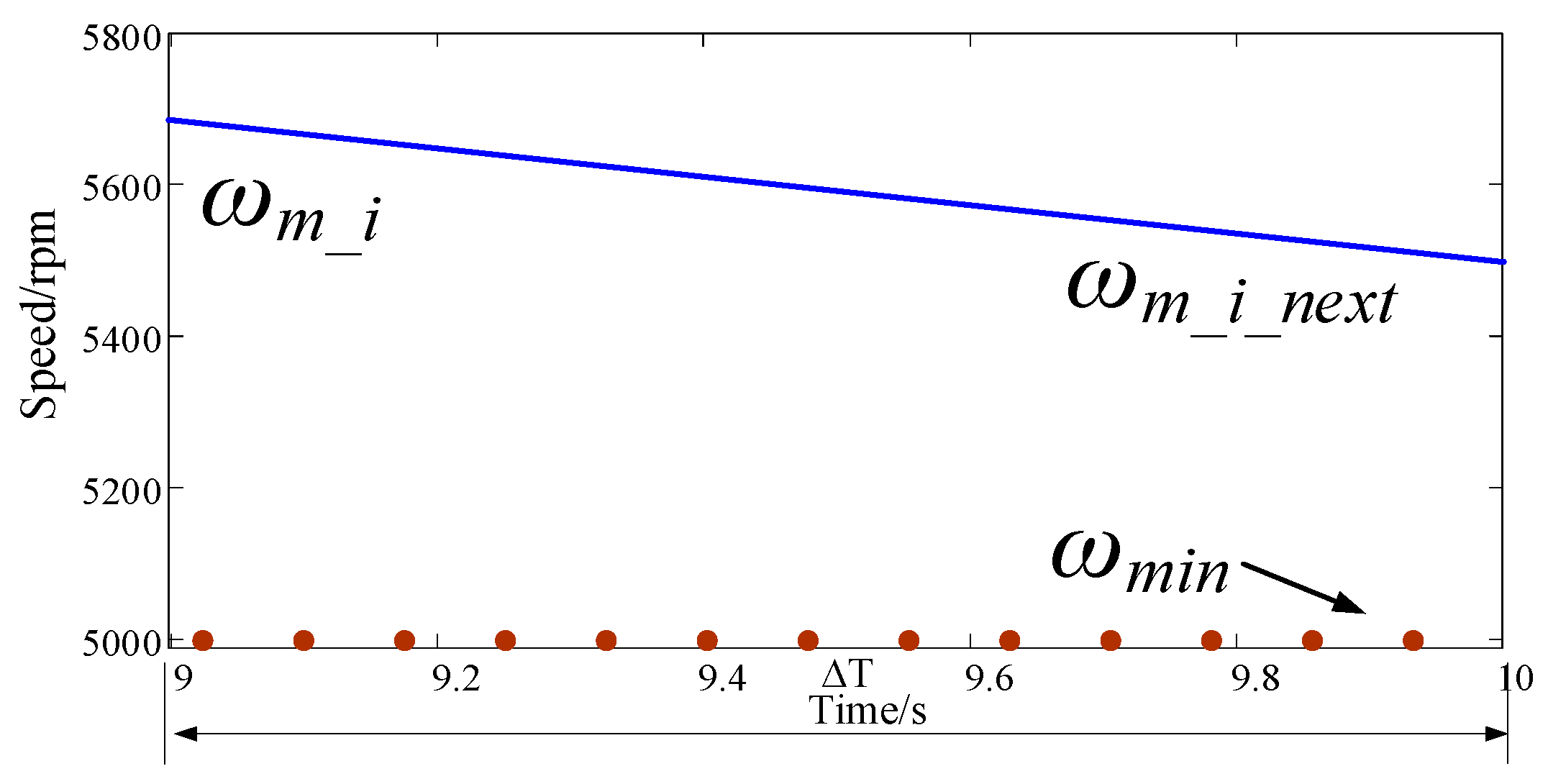
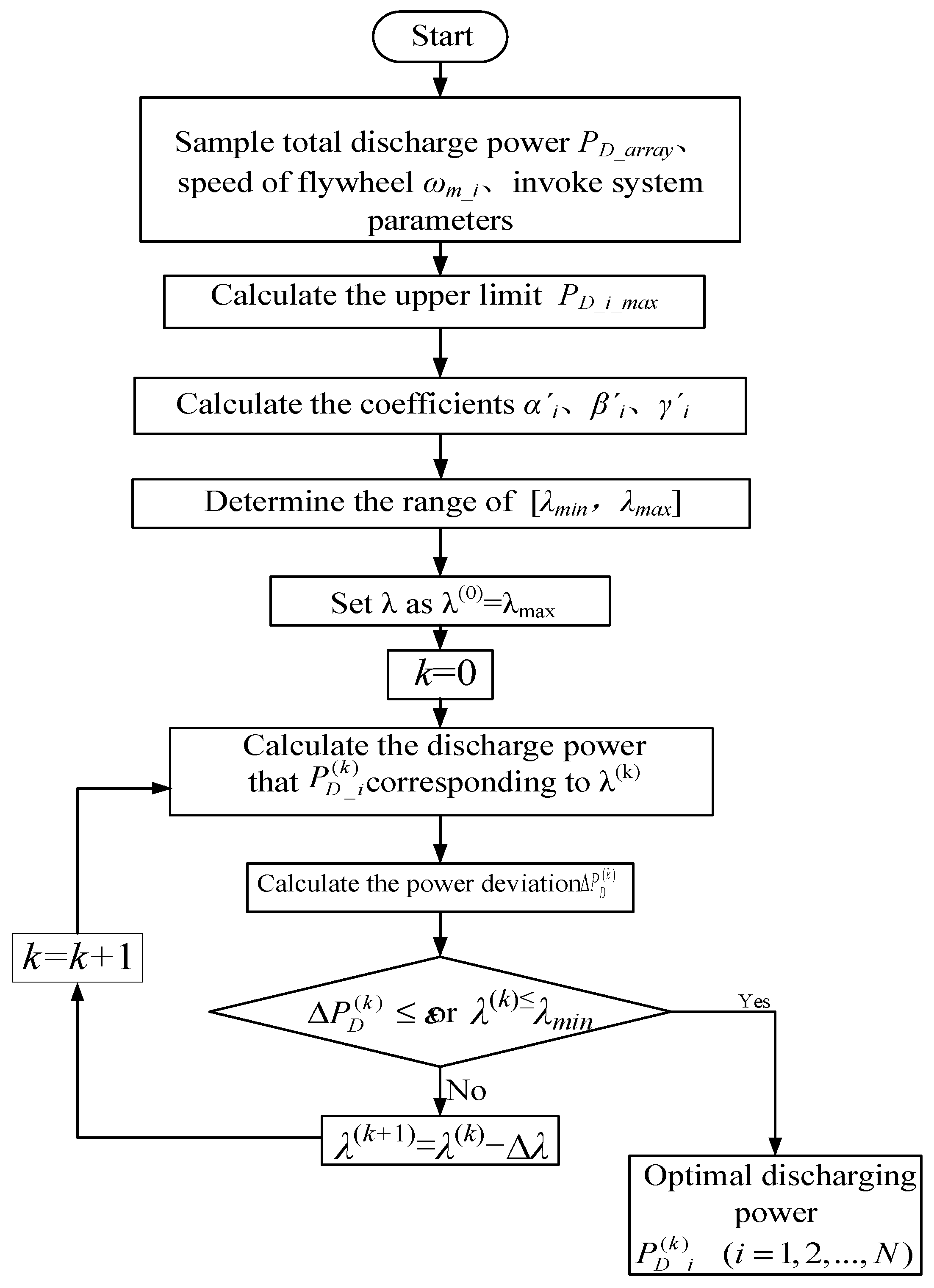
4.3. Research of the Discharging Control Method for the FAESS
4.4. Implementation Scheme of Discharging Control for the FAESS
5. Simulation and Experimental Verification
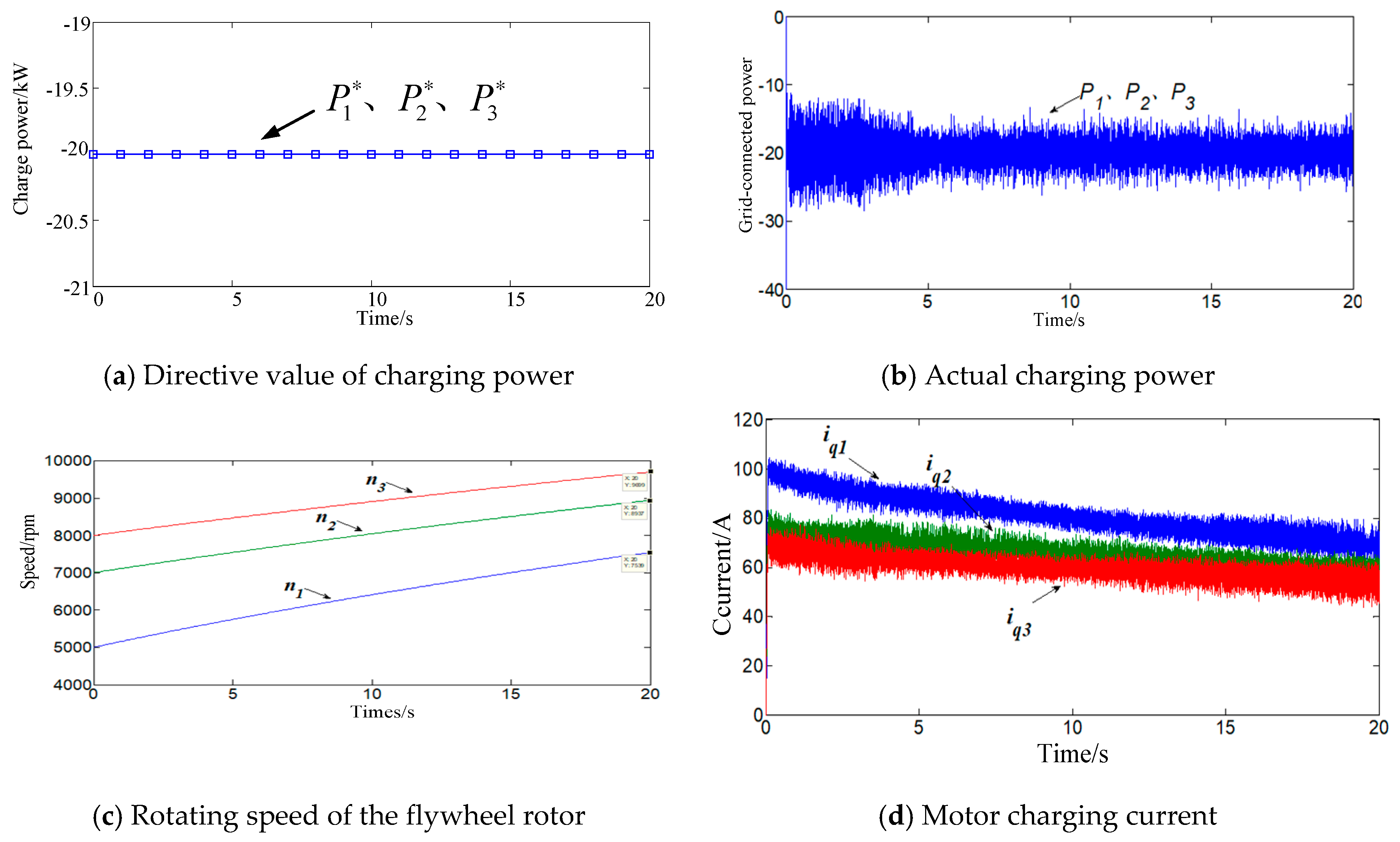
5.1. Charging Example Analysis of FAESS
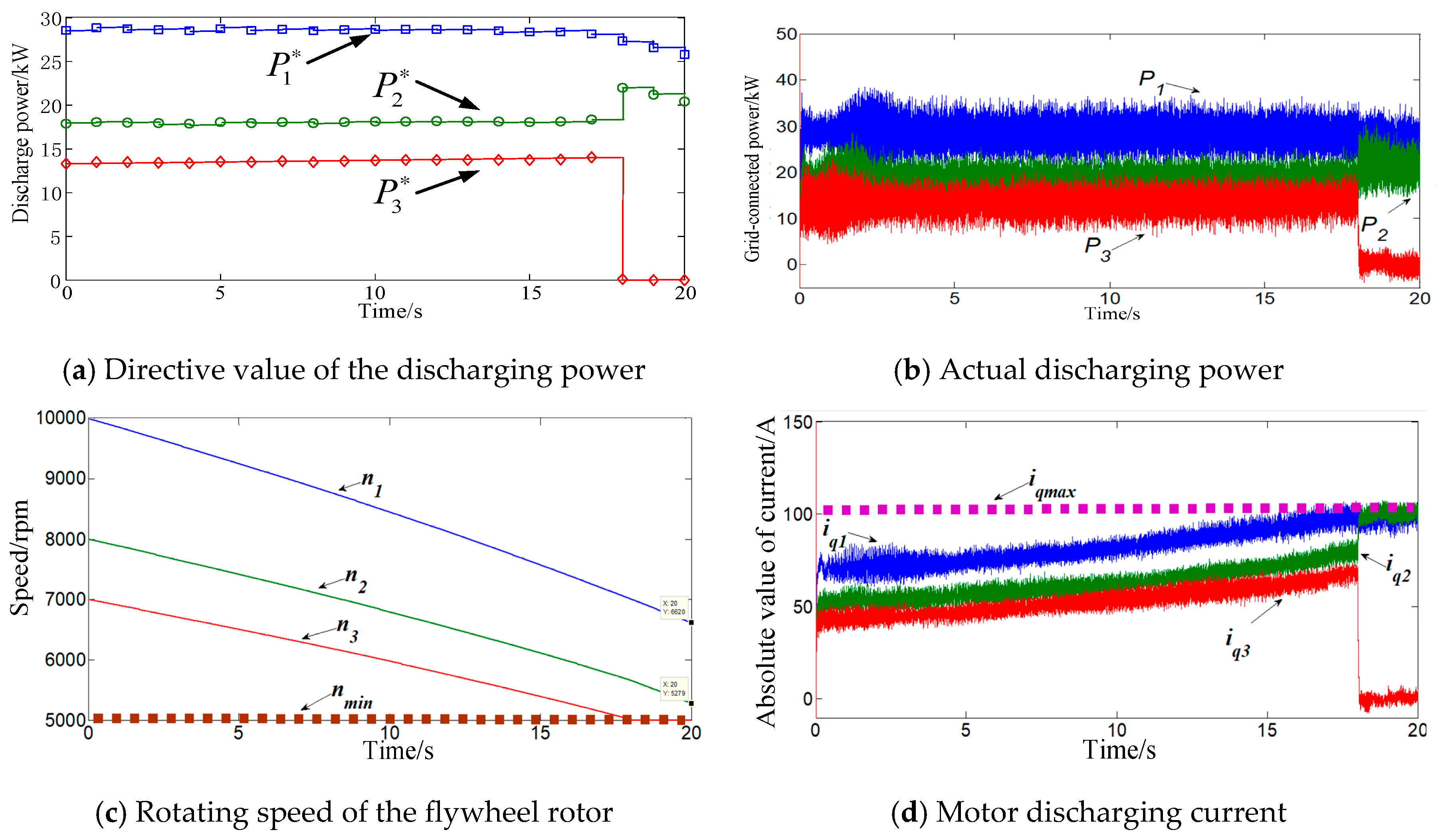
5.2. FAESS Discharging Example
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chengshan, W.; Zhen, W.; Peng, L. Research on Key Technologies of Microgrid. Trans. China Electrotech. 2014, 29, 1–12. [Google Scholar]
- Zheng, Z.; Rongxiang, Z.; Shengqing, T. An Overview on Advanced Grid-connected Inverters Used for Decentralized Renewable Energy resources. Proc. CSEE 2013, 33, 1–12. [Google Scholar]
- Tang, X.; Wenjun, L.; Zhou, L. Flywheel Array Energy Storage System. Energy Storage Sci. Technol. 2013, 2, 208–221. [Google Scholar]
- Amrouche, S.O.; Rekioua, D.; Rekioua, T. Overview of Energy Storage in Renewable Energy System. Int. J. Hydrog. Energy 2016, 41, 20914–20927. [Google Scholar] [CrossRef]
- Mousavi, S.M.G.; Faraji, F.; Majazi, A. A Comprehensive Review of Flywheel Energy Storage System Technology. Renew. Sustain. Energy Rev. 2017, 67, 477–490. [Google Scholar] [CrossRef]
- Arani, A.A.K.; Karami, H.G.; Harehpetian, G.B. Review of Flywheel Energy Storage Systems Structures and Applications in Power System and Microgrids. Renew. Sustain. Energy Rev. 2017, 69, 9–18. [Google Scholar] [CrossRef]
- Wang, L.; Du, X.; Song, Y. Coordinated Control of Flywheel Energy Storage Matrix System for Wind Farm. Power Syst. Technol. 2013, 37, 3406–3412. [Google Scholar]
- Mrugowskyh, H.; Cordt, H.; Sihler, C. Investigation of the Stability of a 600 MJ Energy Storage System Based on Paralleled Flywheel Generators; Electrical Energy Storage Systems Applications and Technologies EESAT: San Francisco, CA, USA, 2002. [Google Scholar]
- Huang, Y.; Jiang, X.; Qiu, A. Discharging Control Schemes for Flywheels in Parallel Configuration. Micromotors 2008, 41, 20–24. [Google Scholar]
- Zhu, J.; Wang, T. Research of Novel Dynamic Voltage Restorer Based on Flywheel Energy Storage System. Electron. Des. Eng. 2010, 18, 158–161. [Google Scholar]
- Cao, Q.; Song, Y.D.; Guerrero, J.M. Coordinated Control for Flywheel Energy Storage Matrix Systems for Wind Farm Based on Charging Ratio Consensus Algorithms. IEEE Trans. Smart Grid. 2016, 7, 1259–1267. [Google Scholar] [CrossRef]
- Wang, D.; Sun, Z.; Chen, Y.; Li, S.; Zhao, S.; Wen, H. Application of Array 1MW Flywheel Energy Storage System in Rail Transit. Energy Storage Sci. Technol. 2018, 7, 841–846. [Google Scholar]
- Saravia, H.S.; Painemal, H.P.; Mauricio, J.M. Flywheel Energy Storage Mode, Control and Location for Improving Stability: The Chilean Case. IEEE Trans. Power Syst. 2017, 32, 3111–3119. [Google Scholar] [CrossRef]
- Guo, W.; Zhang, J.; Li, C.; Su, H. Control Method of Flywheel Energy Storage Array for Grid-connected Wind-storage Microgrid. Energy Storage Sci. Technol. 2018, 7, 810–814. [Google Scholar]
- Zhao, J.; Zhang, J.; Song, Z. Distributed Coordinated Control Strategy Based on Flywheel Energy Storage Array System. J. North China Electr. Power Univ. 2018, 45, 28–34. [Google Scholar]
- Nemsi, S.; Belfedhal, S.; Makhloufi, S. Parallel Operation of Flywheel Energy Storage System in a Microgrid Using Droop Control. In Proceedings of the International Conference on Wind Energy and Applications in Algeria, Algiers, Algeria, 6–7 November 2018; pp. 1–6. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IGBT On Energy, Eon_test | 51 mJ | IGBT Off Energy, Eoff_test | 45.5 mJ |
|---|---|---|---|
| Diode on Energy, Erec_test | 32.5 mJ | Switching Frequency, fsw | 6000 Hz |
| Test Voltage, Vtest | 900 V | Test Current, Itest | 225 A |
| VT0 | 1.14 V | VD0 | 1.1925 V |
| RCE | 0.0036 ohm | RD | 0.0027 ohm |
| Number of Pole-pairs, p | 2 | Kc | 0.11 ohm/rpm |
|---|---|---|---|
| Stator Resistance, Rs | 0.097 Ω | Excitation flux linkage, Ψf | 0.1286 Wb |
| D-axis inductance, Ld | 1.435 mH | q-axis inductance, Lq | 2.085 mH |
| Viscous friction coefficient, B | 0.0035 Nm/(rad/s) | Flywheel rotating inertia, J | 2.063 kg m2 |
| b | 5.8733 | c | 0.004725 |
| d | 0.0178 | f | 4.321 × 10−8 |
| g | 0.1455 | h | 0.3858 |
| k1 | 2.4829 × 10−5 | k2 | −3.79 × 10−6 |
| k3 | 0.094457 | l | −0.9822 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Wei, T.; Tang, X.; Zhou, L.; Zhang, T. Charging–Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle. Energies 2019, 12, 2844. https://doi.org/10.3390/en12152844
Shi C, Wei T, Tang X, Zhou L, Zhang T. Charging–Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle. Energies. 2019; 12(15):2844. https://doi.org/10.3390/en12152844
Chicago/Turabian StyleShi, Changli, Tongzhen Wei, Xisheng Tang, Long Zhou, and Tongshuo Zhang. 2019. "Charging–Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle" Energies 12, no. 15: 2844. https://doi.org/10.3390/en12152844
APA StyleShi, C., Wei, T., Tang, X., Zhou, L., & Zhang, T. (2019). Charging–Discharging Control Strategy for a Flywheel Array Energy Storage System Based on the Equal Incremental Principle. Energies, 12(15), 2844. https://doi.org/10.3390/en12152844