1. Introduction
Remote areas mainly depend on diesel generator units to meet their load demand. In addition, some critical loads as nuclear research reactors and others need effective isolation away from any interruptions or quality problems that might take place in the distribution network. Due to the cost, transportation of fuels, and the emission of undesirable gases from diesel generator engines [
1], renewable resources are the solution for supplying remote areas’ demand. The disadvantages of the photovoltaic systems are their low conversion efficiency with high cost compared to wind power systems [
2]. Wind power has many advantages, as it is clean, produces no air pollution, and is a renewable natural resource.
Diesel generators can be operated in conjunction with wind systems in isolated communities, and act as a standby power source to share load demand in cases of disturbance and wind energy shortage. Diesel generators are not efficient when operating at load factor below 40%–50% of their nominal power [
3]. Diesel–wind systems are famous hybrid power systems. These systems help to reduce fuel and generation costs. In addition, the emissions of undesirable gases can be reduced and minimized [
4]. Also, the combination adds a great advantage to the system, where the required cost of connection between the national grid to remote regions is high [
5,
6].
Wind–diesel systems enhance system reliability [
7] because the diesel generators generate power equal to the difference between wind and load power [
8]. According to the wind power penetration ratio, there are three types of hybrid system: low, medium, and high penetration [
9] (i.e., the ratio of annual wind energy to annual demand energy). If energy penetration is below 20%, the wind–diesel system is considered as low penetration. If the ratio falls between 20% and 50%, the system is classified as medium energy penetration. In high wind penetration, if the system is able to disconnect the diesel generator during operation.
One objective of power quality in micro grid systems is to supply the required load demand of isolated communities with the required power and voltage and constant frequency within the specified standard allowable limits. It is known that wind turbine power has a strong relation with wind speed; wind energy varies quickly from one moment to another. Also, the load demands of isolated communities change frequently, which affects the system frequency. This frequency change significantly decreases power quality and system reliability. Controlling system frequency is based on controlling the active power load–generation mismatch power. Wind turbine blade pitch control is robust, and there are effective approaches to control wind turbines to ensure a constant supply of wind energy and achieve balance in generation and demand power.
Many researchers have proposed various techniques for wind turbine blade pitch control, as follows. A pitch controller was proposed for the wind turbine and the governor in the diesel unit to damp frequency fluctuations in [
10,
11]. A proportional–integral (PI) controller was proposed in [
12,
13]. Optimization of the wind pitch controller for frequency control was designed [
14,
15,
16,
17] based on the genetic algorithm. A fuzzy logic controller was proposed for controlling the hybrid system [
18,
19,
20], and a second type was based on artificial neural networks [
21]. The particle swarm algorithm (PSO) is applied in [
22,
23,
24]. Genetic algorithm and PSO are used in [
25,
26]. The bee colony optimization algorithm (BCO) is introduced in [
27]. Bacterial forging optimization (BFO) is designed in [
28]. H
∞ control has been applied to control the pitch angle, as in [
29,
30]. The differential evaluation algorithm technique is used for tuning the PI pitch controller in [
31,
32]. The modified harmony search algorithm (MHSA) technique is used to tune the PI controller in [
33]. The imperialist competitive algorithm is designed in [
34]. A relay-based technique is proposed in [
35]. Gases Brownian motion optimization (GBMO) is proposed in [
36]. Distributed model predictive (DMP) control is used by the authors in [
37]. The modified bat-inspired algorithm (MBIA) is applied in [
38].
At present, energy storage units are used with renewable sources to act as backup units and store power when generated power is greater than the load power and discharge their power to the system in peak periods of load demand. This action reduces levels of fluctuations. So, energy storage maintains acceptable limits of the system’s frequency [
39,
40]. One of the most efficient storage systems is superconducting magnetic energy storage (SMES). SMES stores energy by direct currents passing through a superconducting coil. This current develops magnetic flux. Electric energy can be stored as circulating current; it can be released or delivered instantaneously from the SMES unit from fractions of a second to hours [
41]. The main advantage of SMES is its ability to release large amounts of power within a small amount of time (fraction of cycle) [
42], and then completely recharge in few minutes. Its efficiency can reach 98% or more. The switching time between charging and discharging is about 17 ms. It has a quick and high-power response, and moreover it is economical; the estimated lifetime of SMES systems is about 20 years [
43]. This paper presents a robust control methodology for a wind–diesel–SMES system. Two controllers were designed to enhance the system performance. The first PID (proportional–integral–differential) controller was designed to control the blade pitch system to maintain constant wind energy supply and thereby control the system frequency. Then, SMES is implemented to quickly absorb the active power fluctuations.
The mine blast algorithm (MBA) is a population-based algorithm, and it was first introduced in [
44,
45,
46] as an offline algorithm. MBA was proposed and designed to solve complex control tasks. It is used in [
44,
46] to solve truss structure problems; results clearly illustrated the effectiveness of the method for solving problems of many design parameters and criteria. In addition, it has a fast rate of convergence to reach the optimal (best) solution and also has low burden (function computational evaluations), verifying MBA’s potential to solve complicated problems compared to other systems such as genetic algorithm and PSO. In [
45], a comparative study showed that MBA was more effective than other recognized optimization algorithms in terms of computational effort and function value for sixteen engineering problems. It was applied in [
47] to obtain the optimal sizing for photovoltaic (PV) fuel cells and wind turbines to supply a certain load; MBA saved 24.82%, 11.5576%, and 8.95% in the yearly cost compared with PSO, BCO, and cuckoo search algorithm, respectively. MBA was used to find the best design networks [
48] of water distribution systems for minimizing the network construction costs. The cost was 5% lower (reduced from €2.17 to €2.064 million) than a conventional system. It has also been used to obtain the maximum power point of partially shaded photovoltaic systems [
49], and results showed that the MBA tracker was more reliable and efficient compared to adaptive neuro-fuzzy, fuzzy logic, and PSO-based systems. In [
50], optimal gain scheduling of the voltage source converters in high-voltage direct current systems was obtained to ensure the desired dynamic behavior and stability improvement. Load frequency control was designed based on a PID controller tuned by MBA for multi-interconnected areas [
51], the system was robust compared to antlion, artificial bee colony, hybrid differential evolution PSO, and hybrid PSO pattern search optimizers [
52]. MBA was applied to a variable-speed wind generator to evaluate the optimal parameters of the rotor current PI controller for setting rotor current close to the desired reference one and tracking the reference system frequency. Based on the above discussion, it can be said that MBA is a simple robust technique that converges quickly and requires few design control parameters.
This paper is subdivided as follows. The system model is discussed and given in
Section 2. In
Section 3 the design of the controller with an objective fitness function is provided. The MBA algorithm is detailed in
Section 4. Results and discussion are explained in
Section 5, and the conclusions are discussed in
Section 6.
2. System Modeling
2.1. Basic Wind–Diesel System
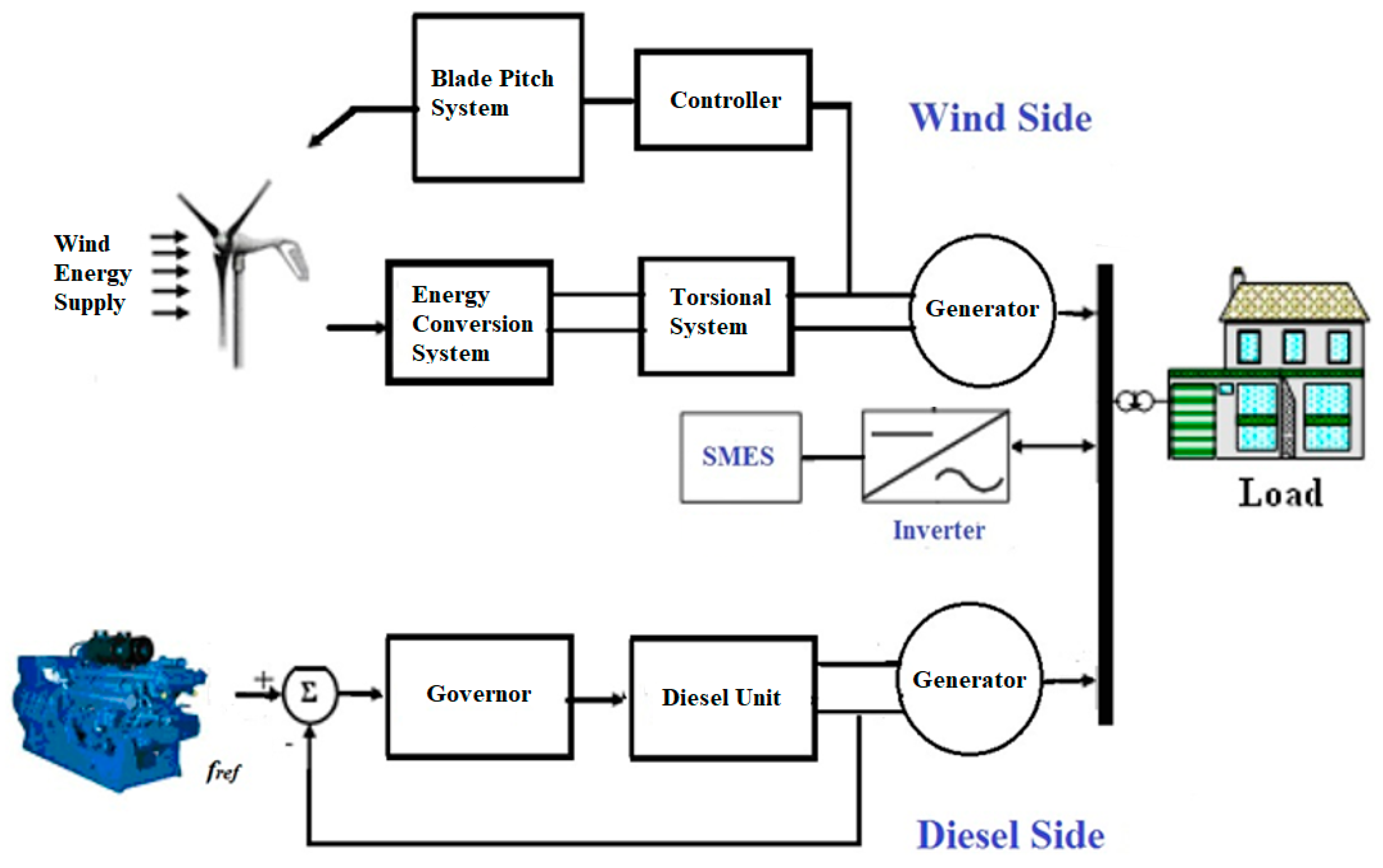
The basic diagram of the hybrid wind–diesel system [
31,
53,
54] is shown in
Figure 1. The system consists of a 200 kW diesel generator controlled by a speed governor system and a 150 kW wind turbine generator controlled by a blade pitch controller. The diesel generator, wind generator, and power system parameters under study are listed [
31,
53,
54] in
Appendix A in
Table A1. The wind turbine and diesel generators’ transfer functions and model are completely illustrated in [
31,
53,
54].
The inertia of the diesel generators and load are lumped together. The diesel governor and throttle compare the system speed (frequency) to a reference speed and compensate for speed error by changing the fuel rate.
2.2. Blade Pitch System
As mentioned in [
55], pitch occurs when there is a variation of the wind speed. Thus, pitch angle control of the blades is a must for ensuring the continuity of energy production by reducing the turbine output power to its nominal level (power control) and protecting the turbine devices from extra high power (safety constraints) during high wind speed. In real systems, this control is basically based on using an anemometer on the nacelle to measure the wind speed and its direction. In the proposed study, the anemometer is simulated by an input variation in wind input power [
53], as any variation in the wind speed will be reflected into a variation in the turbine input power (
).
The blade angle of the wind turbine is controlled by the microprocessor-based controller. Pitch angle can be controlled according to power speed curve shown in
Figure 2. The pitch control system can be illustrated by subdividing the power speed curve into four regions [
29]:
(1) Below cut-in speed
When the wind speed is less than the cut in speed (3–3.5 m/s according to the wind turbine design), the value of the pitch angle must be increased to the maximum value, as the turbine output power is the smallest at this point. = 0 kW, so the pitch angle is fixed at 90° as the turbine output is the smallest.
(2) From cut-in to speed at which rated power occurs (partial load region)
When the wind speed is between cut in and the speed at which rated power can be obtained, the value of the pitch angle must be set at value at which the maximum power can be captured from the wind. The range of is from 0 to 150 kW, so the pitch angle is fixed at 10°, as energy is largest at this angle.
(3) From speed at which the rated power is captured to cut-out
When the wind speed is higher than the rated speed, the power is higher than the nominal value, so the value of the pitch angle must be increased to reduce the turbine output power. Thus, the rated electric power can still be produced. = 150 kW, so the pitch angle is varied from 10° to 90°.
(4) Above cut-out speed
When the wind speed is higher than its cut-out value, the value of the pitch angle must be increased to disconnect the wind turbine and set the output power to zero. = 0 kW, so the pitch angle is fixed at 90° for safety.
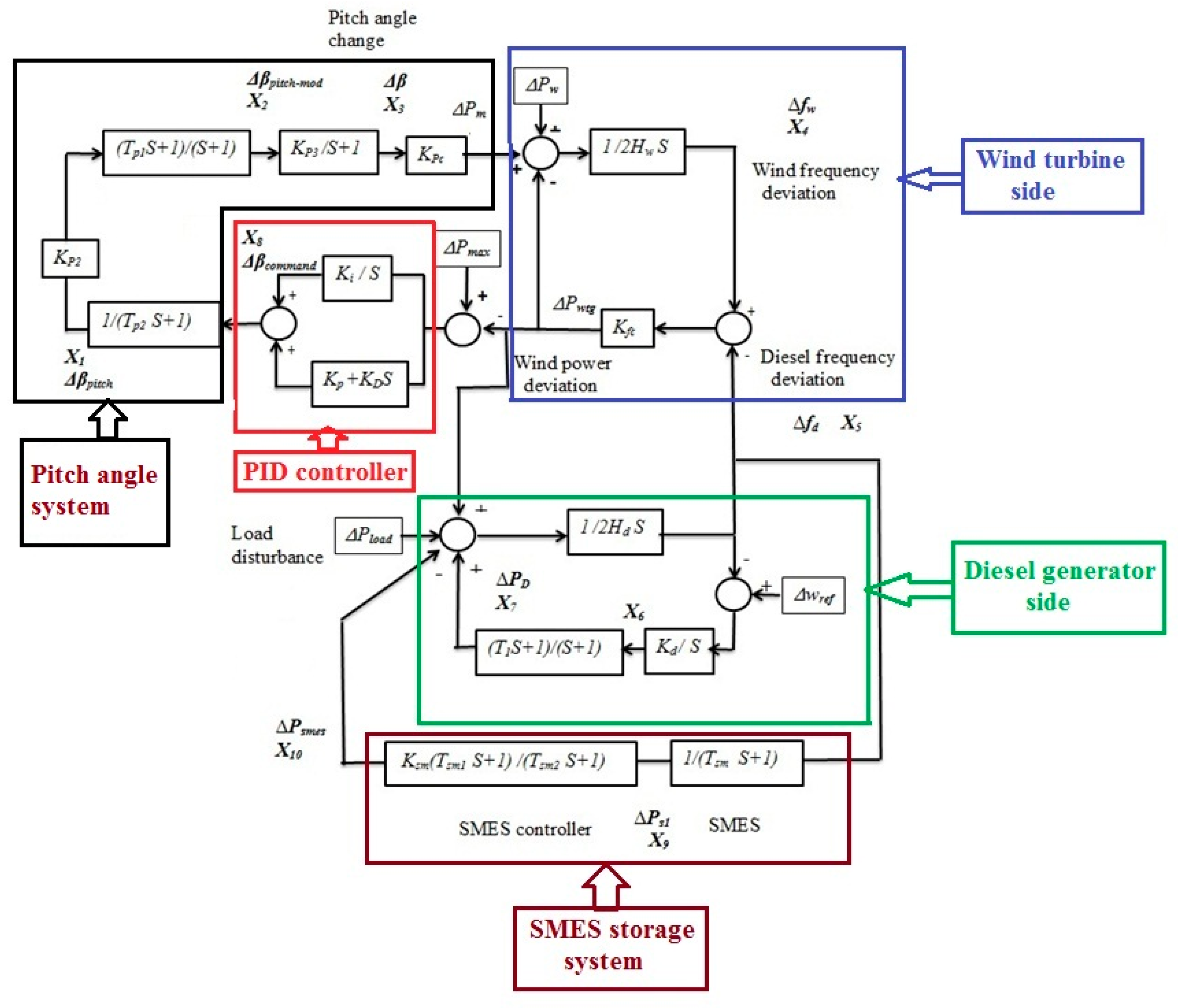
The pitch system consists of a hydraulic pitch actuator for changing the angle of the blades, a PID controller that is altered by the error signal between the power set point (
) and the actual power
. It can be modeled as in [
31,
53,
54]. The power reference set point (
) can be controlled and adjusted from 25 to 150 kW. When wind turbine
provides less power than the reference power, there will be an error difference which alters the hydraulic actuator system. Then, pitch angle control becomes active and compares the generated power to
(the power set point) and compensates for power error by changing the blade angle and thus the mechanical power; this error sets the blades’ angle to 10° (fully feathered position at shutdown). When the power output exceeds
, the pitch control will be active to control for constant
power output. The specified transfer function programmed in the microprocessor controller contains a proportional–integral coefficient–differential controller.
2.3. Superconducting Magnetic Energy Storage (SMES) System
The SMES system can be modeled by a first-order function [
56] with a time constant
= 0.03 s. The controller was designed as first-order compensator with a single feedback input signal, diesel frequency deviation,
.
The wind–diesel dynamic behavior is modeled by the set of differential equations represented in state space as follows:
where
is the system state variables, it is a vector of tenth order whose elements are illustrated in
Figure 3.
is the system control input.
is the system output vector.
A, B, C, and
D are the coefficient matrices of the hybrid system.
where
and
are the changes in wind and load power;
and are the change in wind and diesel frequency;
is the deviation in diesel power;
is the deviation in wind power; and
is the deviation in SMES power.
3. Control System and Objective Fitness Function
At present, PID controllers are one of the most used industrial controllers, due to their robustness and simplicity to be understood. These systems can be designed in various structures (e.g., PID and PI) to control the wind turbine pitch angle for achieving superior dynamic performance of the wind–diesel system. In this paper, a PID controller was selected for controlling the pitch angle. The control input to the pitch actuator is formed as:
where
ACE is the area control error, and
.
,
, and
are the proportional, integral, and derivative gains. If the turbine power
=
, then
= 0. As the reference speed
is constant for the diesel generator, then the reference speed change
= 0. The system parameters including gains and time constants are listed in
Appendix A. The objective function is formulated in the algorithm based on the required constraints and specifications. The performance index is the integral of absolute error (IAE) and it is used as a fitness function to find the optimal values for controllers. Thus, the objective fitness function can be rewritten as:
Based on Equation (6), the problem is formulated as:
Minimize
, subject to,
The range selected in the algorithm for , , and is from 0 to 120.
Also, the MBA system is used to minimize the SMES controller based on the following objective function:
subject to:
where the ranges of SMES gain and time constants (
,
, and
) are [10–40], [0.1–2], and [0.01–0.1], respectively.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














