1. Introduction
Nowadays, power quality (PQ) is seriously influenced by increasing penetration of various power electronic devices connected to the grid. Power electronic devices generally exhibit a nonlinear load characteristic to the power grid, which usually consumes a large amount of reactive power and injects a great deal of harmonics to the line current. In order to reduce the impact of these PQ problems, specifically designed static VAR compensator (SVC), static synchronous compensator (STATCOM) and active power filters (APFs) have been widely used with satisfactory performance for reactive power compensation (RPC) and harmonic current compensation (HCC). However, in recent years, with the increasing application of distributed generation (DG) systems, many researchers believe that compared to those specifically designed pieces of equipment for power quality improvement, incorporating RPC and HCC functionality into existing popularly used bidirectional power converters as the interface of DG systems may be a more cost-effective solution for power quality management [
1,
2,
3]. A significant advantage of this solution in power quality management is that the local compensation of reactive power will eliminate the extra power loss due to long-distance transmission of reactive power and does not require additional hardware costs.
However, in quite a lot of practical applications, such as the front end of power converters for alternating current (AC)speed regulation with pumps or fan loads, switching the power supply for telecommunications and electric vehicles (EV) battery chargers for level I, etc., unidirectional power converters are usually the preferable choices. Compared to bidirectional converters, unidirectional power converters use fewer fully controlled power switches, simpler controllers, and have lower power losses as well as lower cost for implementation. Taking this consideration into account, many researchers have also been investigating the possibility of incorporating RPC and HCC functionalities into unidirectional power converters [
4,
5].
In [
6] and [
7], Vienna rectifiers with added active filter functionality in three-phase three-wire and three-phase four-wire systems have been reported, respectively, but integrating reactive power compensation function into Vienna rectifiers is not mentioned in either study. In [
8], integrating harmonic current compensation (HCC) and reactive power compensation (RPC) functionality into the Vienna rectifiers is investigated, and a conclusion is given based on theoretical analysis, which states that because of the unidirectional power flow characteristic, Vienna rectifiers have only limited RPC capability. In [
8], how to enhance the RPC capability for unidirectional converters is not further studied, so although [
8] studied incorporating RPC functionality into traditional unidirectional power converters, the discussion is far from sufficient.
Incorporating RPC function into conventional unidirectional power converters means the phase angle of the input current of the converter with regard to the source voltage should be able to be shifted in leading or lagging freely. However, because of the unidirectional power flow characteristic of the converter, the input current distortion appears whenever the polarity of the AC side current and voltage of the rectifier become opposite [
4,
9]. This means that, the larger the phase angle, the higher the input current distortion would be. The input current distortion greatly limits the incorporation of RPC functionality into conventional unidirectional power converters. Up to now, no ideal solutions are discussed to mitigate or even eliminate this input current distortion.
In 1991, K. M. Smedley proposed the one cycle control method, since then, it has become one of the widely used control strategies for single phase and three-phase AC/DC (direct current) pulse width modulation (PWM) converters [
10,
11,
12,
13,
14,
15]. The OCC strategy is often referred to as resistance emulation control. It will force the input current to be in phase with the grid voltage in sinusoidal waveform automatically with no requirement for phase locked loop (PLL), grid voltage sensors and frame transformation, when it is adopted by the boost type PWM rectifiers [
16]. These unique features make the OCC much easier to implement. However, despite the aforementioned advantages, COCC does not provide a practical method to make the phase angle of the input current of boost type PWM converters become adjustable. Therefore, the COCC control strategy cannot be used directly to regulate the input power factor of the PWM converters. In addition, in the COCC strategy, the input current of the converter always lags the grid voltage by a small angle due to neglecting the voltage drop of the input inductor, which results in a converter with non-unity power factor displacement [
17,
18].
Part of this paper has been published at a conference [
19]. However, in the conference paper, the capabilities of compensation and the effects of frequency changes for the proposed control strategy were not discussed. Moreover, the experimental validation was not provided as well.
In this paper, a modified one-cycle-control strategy is proposed to achieve phase shift control of the rectifier input current, which makes the Vienna rectifier be able to operate under leading, lagging or unity power factors. A compensation method for mitigating input current distortion caused by phase-shift of the input current is also provided.
The rest of the paper is organized as follows. In
Section 2, the operating principle of the COCC strategy is reviewed briefly. On this basis, the MOCC strategy with input current phase-shift control is proposed in
Section 3. In
Section 4, the cause of the input current distortion with unidirectional power rectifiers is analyzed. To solve this problem, a control strategy to mitigate input current distortion of unidirectional three-phase Vienna rectifiers based on MOCC scheme is proposed in
Section 4. Simulations and experimental results are provided in
Section 5 to verify the validity of the theoretical findings. Finally, the conclusions are summarized in
Section 6.
2. Basic Principles of Conventional OCC
Although the basic operation principle of the three-phase Vienna converter with COCC strategy has been discussed in several papers before, for the sake of completeness, this paper will still start with a brief introduced of it.
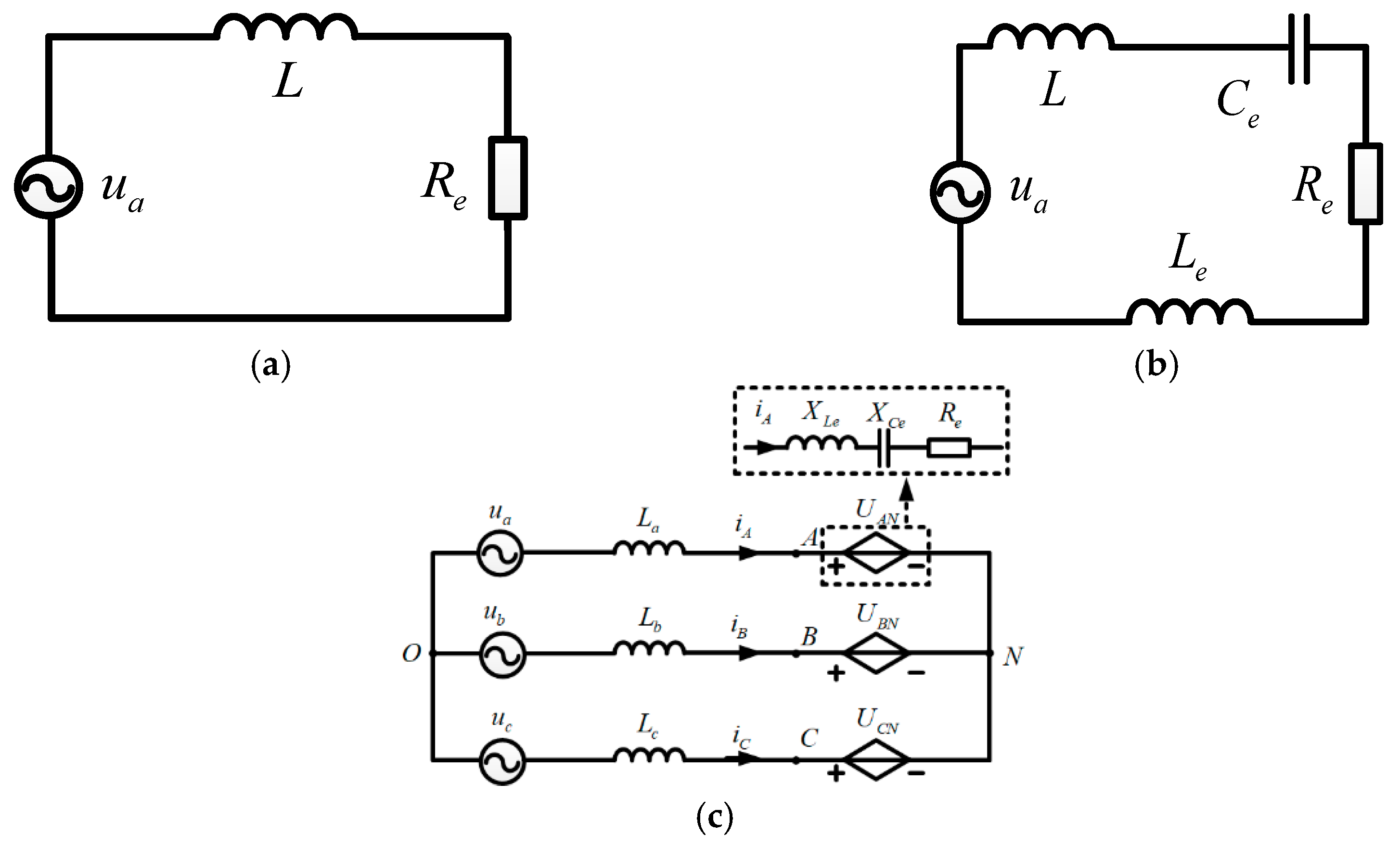
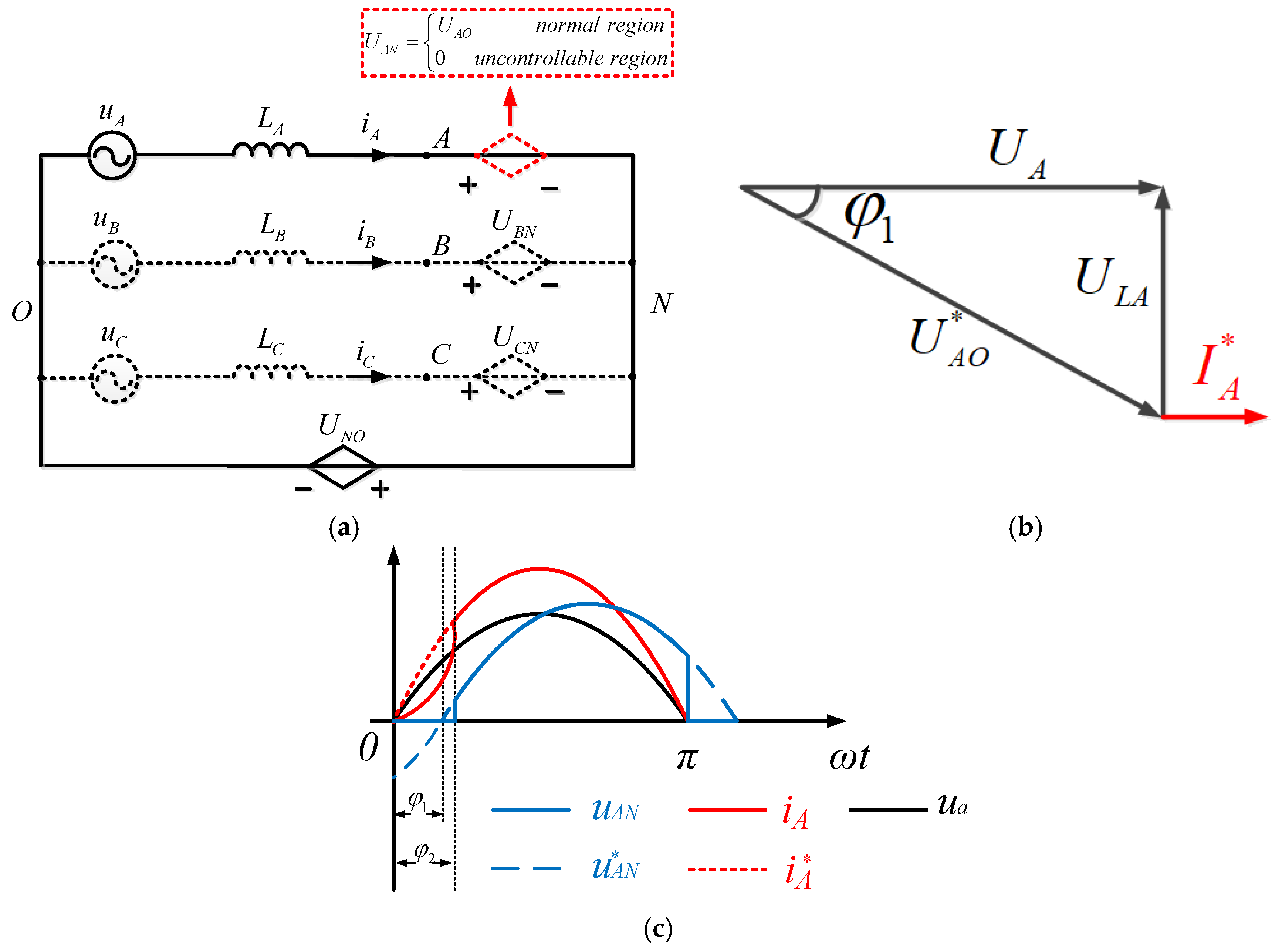
The schematic and its average model of the switching period for the three-phase Vienna rectifier are shown in
Figure 1a,b, respectively. In
Figure 1a,
is the output voltage on the DC side and the
is the three-phase input voltage. In the average model shown in
Figure 1b, the average voltages
at nodes A, B, C with respect to the neutral point “O” equal to the phase voltages minus the voltages across the inductors
,
,
(assuming
), are given by
where
are inductor currents and ω is line angular frequency.
In the COCC strategy, when the switching frequency is much higher than the line frequency, the voltages across the inductors are usually seen as small enough to be neglected, therefore Equation (2) can be obtained
where
is the RMS value of the phase voltages and
. For a three-phase rectifier with unity-power-factor, the control goal is described by
where
is the emulated per-phase resistance when viewed from the ac-input side reflecting the output power-level. The COCC core equations for the three-phase Vienna rectifier are shown below (derivation of Equation (4) and can be found in [
20])
where
is the equivalent resistance of current sensor and
,
are duty ratio of switches
,
and
, respectively.
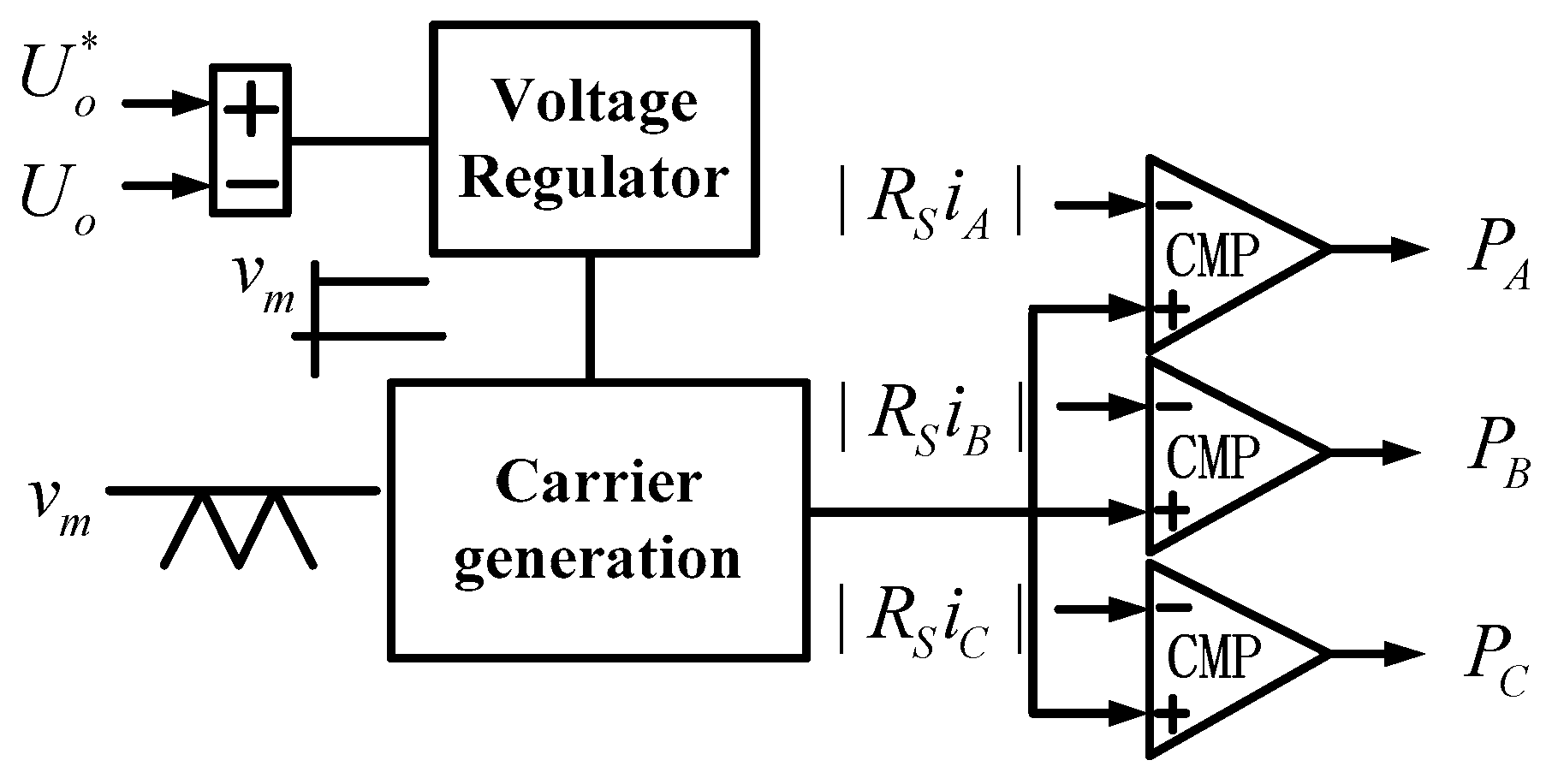
The control block diagram based on COCC core equations is shown in
Figure 2. In this control system, the error between the reference voltage and sensed dc-link voltage is regulated through a PI controller, and the output signal
connects to the carrier generator. The carrier generator synthesizes a triangular waveform with amplitude
, which is used to compare with the sampled input current signals. PWM signals are then generated to control the three switches in the Vienna rectifier and force the average inductor currents over one switching cycle to follow the corresponding phase voltages. Both digital and analog circuits can achieve the above control goal.
It should be noted that the COCC core Equation (4) is derived based on the assumption of balanced three phase source voltages. In case of unbalanced three phase source voltages, under COCC control, the three phase input currents will follow the vector sum of the positive and negative components of the source voltages to become unbalanced also, and a large capacitance on the DC side is necessary to minimize the input current harmonics and suppress DC side voltage fluctuation [
21]. To overcome above problem, [
22] proposed a modified OCC, in which a minor modification to COCC is given, by sensing both the source voltages and line currents and reconstructing the reference signals based on harmonic extraction, the three-phase input currents will be improved to become more balanced with sinusoidal waveform, meanwhile the dc-link voltage can still keep on smooth value with smaller ripple. Since the focus of this paper is how to make the power factor of Vienna rectifier become adjustable under OCC control and how to mitigate the input current distortion caused by the current phase shift. For simplicity, all the following discussions are conducted based on the assumption of balanced three phase source voltages.
3. Current Phase-Shift Control Based on MOCC Scheme
As can be seen from the above description, the essence of the COCC-based three-phase Vienna rectifier is to realize unit power factor operation by resistive load emulation.
Figure 3a shows the equivalent circuit for each phase. In this section, the modification to COCC strategy is presented to enable the input power factor of the Vienna rectifier adjustable. To achieve this control goal, the per phase emulated load is changed from a pure resistor
to a complex impedance
made up of a resistor
and a reactor
in series connection as shown in
Figure 3b.
represents the emulated per-phase reactance reflecting the required output reactive power-level.
Figure 3c shows the average model of the switching period for the three-phase Vienna rectifier under MOCC control. The complex impedance of the emulated load Z is given by
3.1. Input Current Phase-Shift Control Strategy
For a balanced three-phase system, it holds that
The cycle average voltages at nodes A, B, C with respect to the neutral point O are given by
Combining Equations (1), (6) and (7) yields
In a three-phase three-wire system
Combining Equations (8) and (9) yields
Equation (10) means that different emulated load has no influences to voltage
. Substituting Equation (10) into Equation (7) results in
Simplifying above equations yields
If the converter operates in continuous conduction mode (CCM), the average node voltages
,
,
in each switching period can be given by
is the sign function defined by Equation (14)
Substituting Equation (13) into Equation (12) yields
As mentioned above, compared to COCC, in MOCC the per phase emulated load is changed from a pure resistor
to a complex impedance
, taking this factor into consideration and substituting Equation (5) into Equation (15) yield
Since the matrix in Equation (16) is singular, there is no unique solution, one possible solution can be obtained in follows
Equation (17) is the core control equation of the MOCC-based three-phase Vienna rectifier. Different from the COCC-based core control Equation (4), two items appear on the right side of Equation (17) instead of only one item, the first item represents the active power consumed by the load, the second item represents the reactive power requirement to the Vienna rectifier which will be used to calculate the phase shift angle of the input current. If the second item of Equation (17) equals to zero, then Equation (17) will be simplified to Equation (4).
If
in Equation (17), then Equation (17) will become:
The control strategy based on Equation (18) will enable the Vienna rectifier to operate under unity power factor exactly, which means the displacement angle of input current under the COCC strategy will be regulated to zero. Therefore, Equation (18) can be considered as a more general expression of the OCC core control equation.
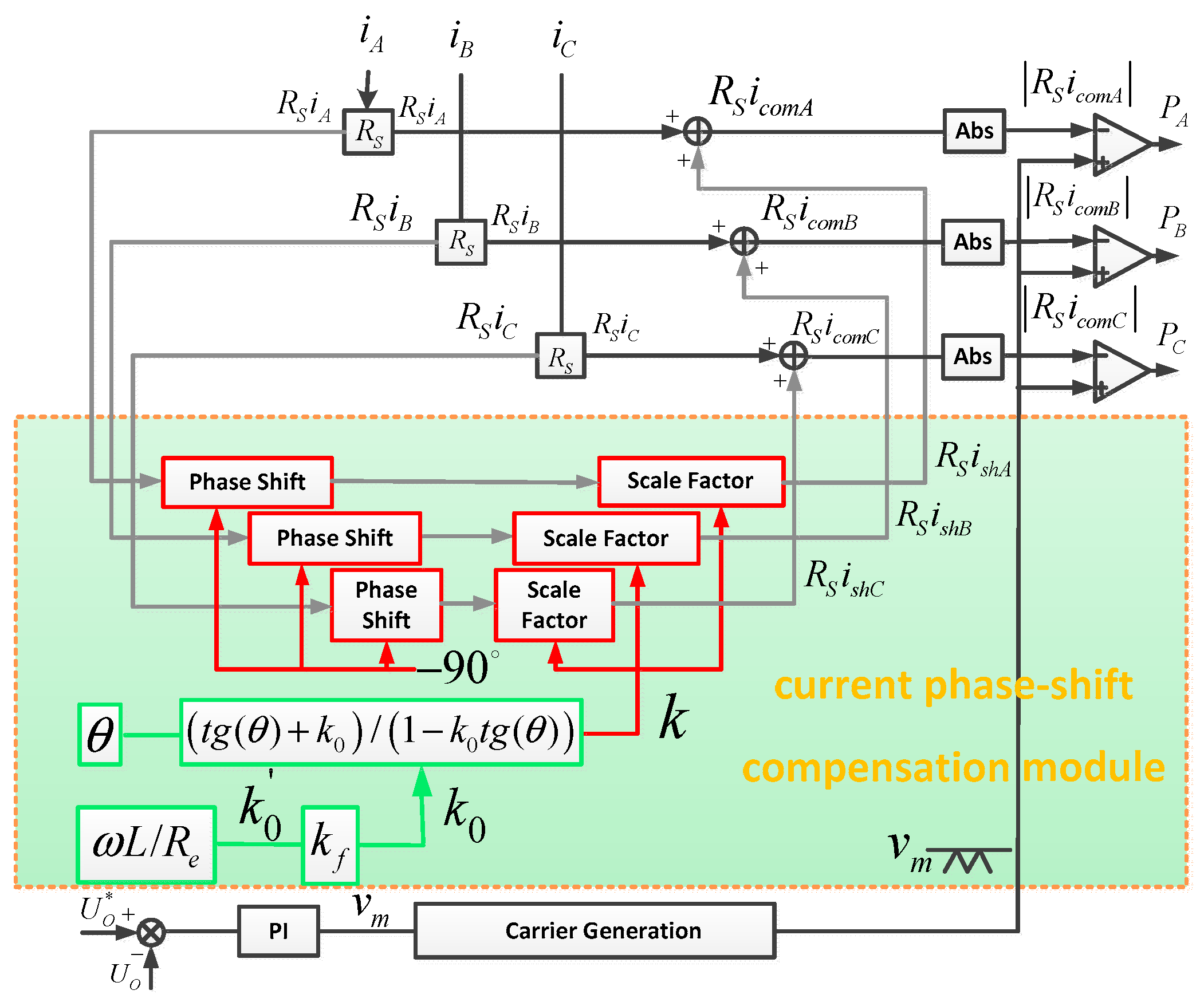
Figure 4 shows the block diagram of the proposed MOCC based control system, a phase shifter block is added which shifts the phase angle of the sensed input current signals
by 90° and then multiplies the gain k determined by the requirement of reactive power compensation to generate the shifting current signals
. Adding the shifting current signals
back to the sensed input current signals
gives the compensation current signals
, the absolute value of compensation current signals are finally used to compare with the triangular waveforms to generate the PWM signals to force the Vienna rectifier to operate under the required input power factor.
3.2. Implementation of 90° Phase Shift of Input Current Signals
If assuming grid frequency is constant, then one of the simple ways for shifting the phase angle of sensed input current signals by 90° in a digital circuit is to design a stack array with n memory cells, and let (where is the input current sampling period and is the fundamental period of input current), thus, after passing through the array, the sampled current signal will naturally lag by a quarter grid cycle. However, grid frequency cannot always remain unchanged, variations in grid frequency will influence the phase shift angle and as a consequence, affect the RPC compensation accuracy, although the allowable range of the grid frequency deviation is usually very limited. In order to reduce the influence of grid frequency, in the phase shifter block of the control system, the number of stack array n is designed to vary with the grid frequency. The value of n is determined by calculating the number of input current samples between two input current zero crossing points. To minimize the impact of errors caused by possible inaccurate zero crossing points determination, and considering that the rate of grid frequency variation is usually much lower than 50 Hz/60 Hz, the multicycle moving average (MCMA) method is adopted, in which, the counter is activated at the zero crossing point in first grid cycle, and stopped at another zero crossing point after q grid cycles, assuming the number of samples between the two zero crossing points is , then can be calculated by . In the next calculation of n, the number of samples between the zero-crossing point in the second grid cycle and q+1th grid cycle is counted, and so on.
3.3. Calculation of Gain k and Constraints
According to the above discussion, the actual three-phase sensed input current signals
under COCC control can be expressed as
where
is the RMS value of the input currents,
and
is the lagging displacement angle caused by the input inductance voltage drop.
As shown in
Figure 4, by shifting the angle of the sensed input current signals
by 90°, and multiplies the gain k determined by the required power factor, the shifting current signals
can be obtained as follows
The compensation current signals
can then be synthesized as
where
is the displacement angle determined by required input power factor.
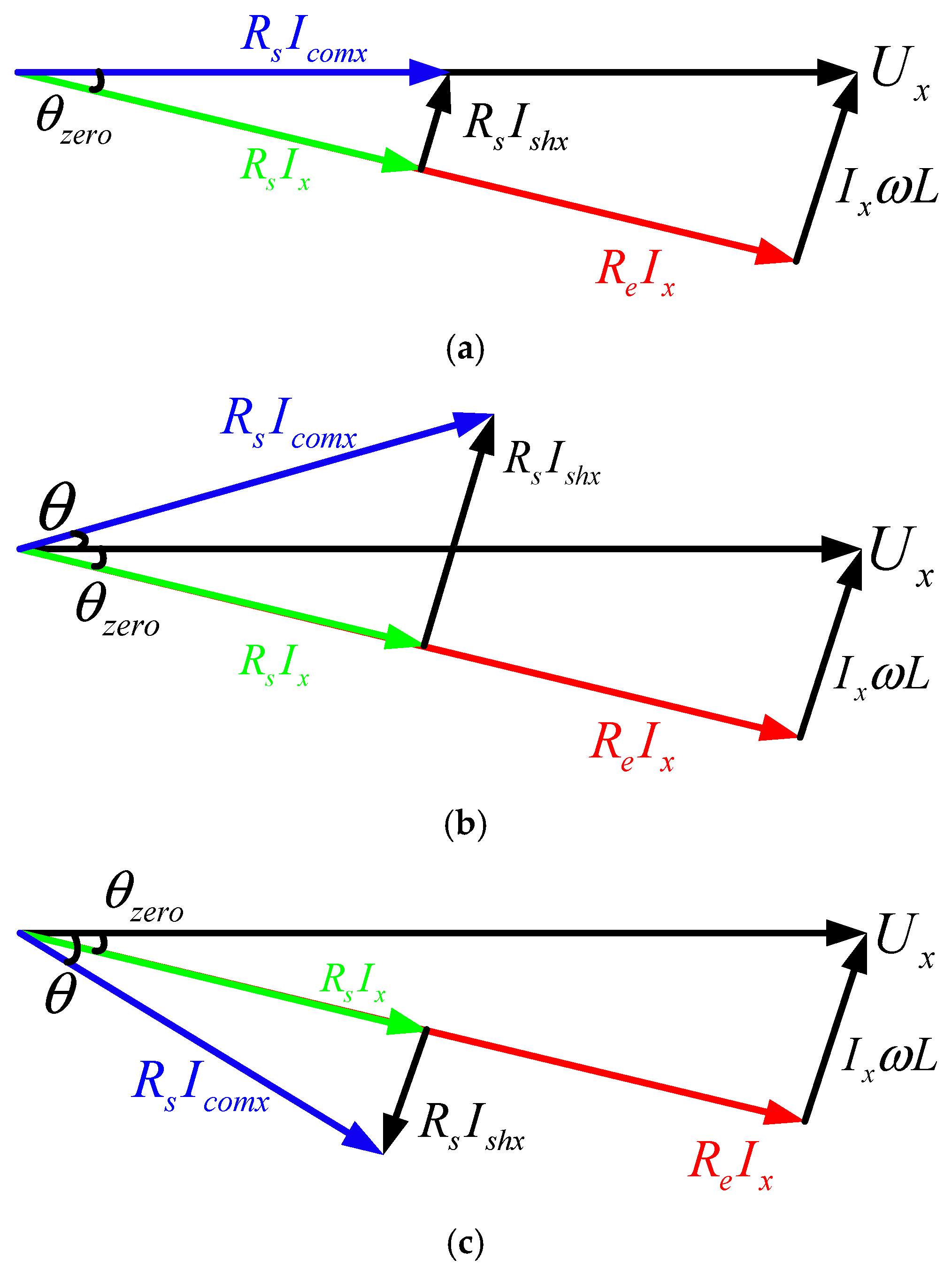
If the rectifier is required to operate under unity power factor as shown in
Figure 5a, then
, in this case, the input inductor voltage drop is compensated, which will enable the rectifier to operate in unity power factor exactly.
If the rectifier is required to operate under leading power factor or under lagging power factor with required displacement angle
as shown in
Figure 5b,c, respectively, then
In Equation (22), will take positive value when operating in the leading power factor, while taking negative value when operating in the lagging power factor.
Similar to the above discussion, variations in grid frequency will also affect gain , so should also vary with the grid frequency, to facilitate this, a correction factor is provided to the original gain by using above mentioned MCMV method. Supposing that the sampling number between two zero crossing points in an under rated grid frequency is m, the corresponding gain is , and the sampling number between two zero crossing points under new grid frequency is , then the correction factor can be obtained as , the corresponding gain is revised to be .
Based on the expressions given by Equations (19), (20) and (21), Equation (17) can be rewritten as
It can be noted that the expressions of MOCC based on control core Equation (23) and the COCC based control core Equation (4) are very similar.
Equation (23) indicates that to ensure the stability of the system, the amplitude of the generated compensation current signals should not exceed the peak value of the triangular waveform
, otherwise, overmodulation will happen which will make the system become unstable and cause quite a lot of harmonics appearing in the input currents. So, the compensation current signals must meet a constraint given by






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}