1. Introduction
One of the main challenges for floating offshore wind turbines (FOWT) installed in moderate depth and deep-water sites is the increased maintenance and operation costs due to the structural damage of the FOWT system under severe environmental conditions. The most critical issue for the design is how to accurately predict the hydrodynamic loading and structural dynamic response of the floating platform, the tension loads of the mooring system and aerodynamic responses of the wind turbine.
Several experimental campaigns examining the responses of FOWT to wave loads have been carried out [
1,
2,
3]. However, the scaling effect becomes one of the main issues when laboratory test data are applied to practical FOWT design, due to the difficulty of retaining all relevant non-dimensional similarity parameters the same between the scaled model test and full-scale prototype. Most existing experimental FOWT models are designed and manufactured by keeping the Froude number the same, in which the ratio between the inertial and the gravity force is identical between the scaled model and full-scale prototype. However, in this situation, the Reynolds number is not the same. Muller et al. [
4] mentioned in his study that, as most of the scaling laws applied to the FOWT are based on the Froude scaling, the prediction of the flow conditions over the wind turbine varies between the scaled model and full-scale prototype, as the Reynolds number is different.
Parallel to the experimental investigation, some simplified analysis tools have been developed, e.g., Fatigue, Aerodynamics, Structures, and Turbulence (FAST) [
5], developed at the National Renewable Energy Laboratory (NREL) in the USA [
6], the Wind Atlas Analysis and Application Program (WAsP) [
7], and the Horizontal Axis Wind turbine simulation Code 2nd generation (HAWC2) [
8], developed by the Technical University of Denmark (DTU). These tools use time-domain analysis to study the FOWT, in which the hydrodynamic loads are usually estimated by using the Morrison’s equations in combination with a potential flow theory approach. Associated with these potential flow models, the viscous term is excluded. To account for the viscous loss, a derived drag coefficient is introduced into these models. Such models underestimate the nonlinear forces, which are usually the results of the dynamic responses of the floating structures in severe sea conditions, including wave-current interaction. In addition, the damping model in potential theory is unable to consider the transverse or lift forces associated with vortex shedding, which significantly affects the accuracy of the predicted motion responses of a system in the transverse direction.
To completely account for viscous effects in the FOWT modelling, one needs to use the high-fidelity Computational Fluid Dynamics (CFD) method, where the viscous effects are taken into account by directly solving Navier-Stokes equations in CFD [
9,
10,
11,
12]. This becomes extremely important when FOWT operates in harsh environmental conditions when the nonlinear hydrodynamic wave loading applied to the FOWT structure should be accurately predicted. In addition, CFD simulation also allows an accurate prediction for large free-surface elevations, which is impossible to achieve using low-order methods.
At present, the studies on the hydrodynamic, structural and aerodynamic response of FOWT using a CFD tool are limited, and most of them primarily focus on regular waves. For example, Tran and Kim [
13] investigated a semi-submersible platform dynamic response and tension loads by using a commercial CFD software STAR-CCM+. Their results showed a good agreement with the data from the experiments and NREL FAST. Liu et al. [
9,
11,
14] developed a fully coupled CFD tool to simulate the complex fluid-structure interaction between wind/wave flow and the FOWT by using OpenFOAM. In addition, in order to obtain data comparable with potential flow theory tools, their CFD numerical modelling results provided more detailed wave-/wind- structure interaction.
However, as mentioned above, an FOWT operates in irregular wave conditions, and thus, strong wave-structure interactions occur. To address this, Nematbakhsh et al. [
15] developed a nonlinear computational model to investigate the performance of a spar-type FOWT, where irregular waves are considered via solving unsteady Navier-Stokes equations with a level-set method to predict the free-surface. Two sea state conditions are studied, with significant wave heights
Hs of 8.0 m, wave peak period
Tp = 10.0 s and
Hs = 14.0 m,
Tp = 16.0 s. The CFD modelling in the time domain considers a sample time of 500 s, which corresponds to 30 to 50 wave peak periods. Although a reduced-order model is used to represent the impact of wind turbine onto the floating spar platform via imposing a specified force and thrust, the CFD results showed large responses in the surge, heave and pitch motions and also the large tension loads in the mooring system.
The term extreme wave is usually used to refer to an ocean wave with an extremely high amplitude which may cause FOWT sub-structure potential damages due to the large, unpredictable unsteady hydrodynamic force [
16,
17]. The survivability of an FOWT depends very much on how well it is able to withstand the very large wave and wind loadings which occur under unexpected extreme wave conditions. However, to analyse a FOWT subject to a train of extreme waves long enough to find a reliable estimation of extreme values requires a large computational resource. Some numerical analysis work has attempted to deal with extreme waves with either a linear or nonlinear theory [
18]. With a nonlinear different phase-resolving deterministic wave models, Khait et al. [
19] generated a 2D deep water extreme wave. Unfortunately, the above work is limited to a pure numerical wave generation without any interaction with offshore structures. Due to the requirement for long computational time, a full-scale CFD modelling of extreme waves in a numerical wave tank with nonlinear wave theories is rarely used.
One effective way to model the extreme wave loading with a reasonable computational time is to use the concept of linear focused wave technique [
20]. A focused wave is a wave consisting of a series of regular waves generated from a prescribed wave spectrum. Compared to the modelling of the extreme wave using the irregular waves approach, the numerical computational time for a study based on a focused wave approach is dramatically reduced, as the desired peak can be reached in a very short time, on the level of a few tens of seconds or so. In contrast, the time for irregular wave normally takes a time window of typically three hours. Because of this reason, the focused wave approach has been used by several researchers to study the wave-structure interaction to replicate extreme wave conditions under severe sea states.
At a very early stage, Baldock et al. [
21] designed a focused wave through the superposition of a group of regular wave trains. With that model, they investigated the nonlinearity of wave-wave interaction without offshore structures. Recently, their study has been extended to the focused wave impact on fixed and floating offshore structures with simple geometry. For example, Gao et al. [
16] investigated the nonlinear effects for a semi-submerged horizontal cylinder column under focused waves using a CFD tool. The predicted numerical data were compared with the results obtained in a regular wave condition, in which the trough-to-trough period is selected to be the same as the regular wave parameters. The comparisons indicated that, with a focused wave, the vertical force and the horizontal velocity exerted on a cylinder are more significant. By generating a focused wave with a Joint North Sea Wave Project (JONSWAP) spectrum, Mai et al. [
22] reported a wave tank test for a wave-structure interaction for a series of floating production storage and offloading (FPSO). With the use of a constrained interpolation profile method to capture the nonlinear wave-structure interactions, Zhao et al. [
23] modelled a 2D simple floating body under three types of wave, e.g., a regular, a focused and a combined regular and focused wave to reveal the highly nonlinear effects with different incident wave parameters (wave amplitude, focused position). The numerical computations are in good agreement with the experimental results.
As a brief review of the above indicates, the early focused wave studies have either been limited to a fixed offshore structure like FPSO or simple floaters such as a cylindrical column, and less attention has been devoted to the floating platforms that are used to support floating offshore wind turbines. To bridge this gap, in the present paper, we use a high-fidelity CFD numerical modelling tool to investigate the dynamic response and the hydrodynamic loading of a FOWT. Unlike our previous work [
9,
11,
14], which was focused on regular waves, here, we extend the study to focused waves and engage in a range of wave parameters. In addition, to better understand the nonlinearity associated with extreme waves, we compare our CFD results with the data obtained from the potential flow theory, which were calculated using the Électricité de France (EDF) [
24] and NREL FAST codes.
The rest of this paper is organized as follows: in
Section 2, the geometry and properties of the platform and FOWT are described; the governing equations and numerical algorithms used in the present study are briefly reviewed (details are included in our previous publications [
9,
11,
14]). In
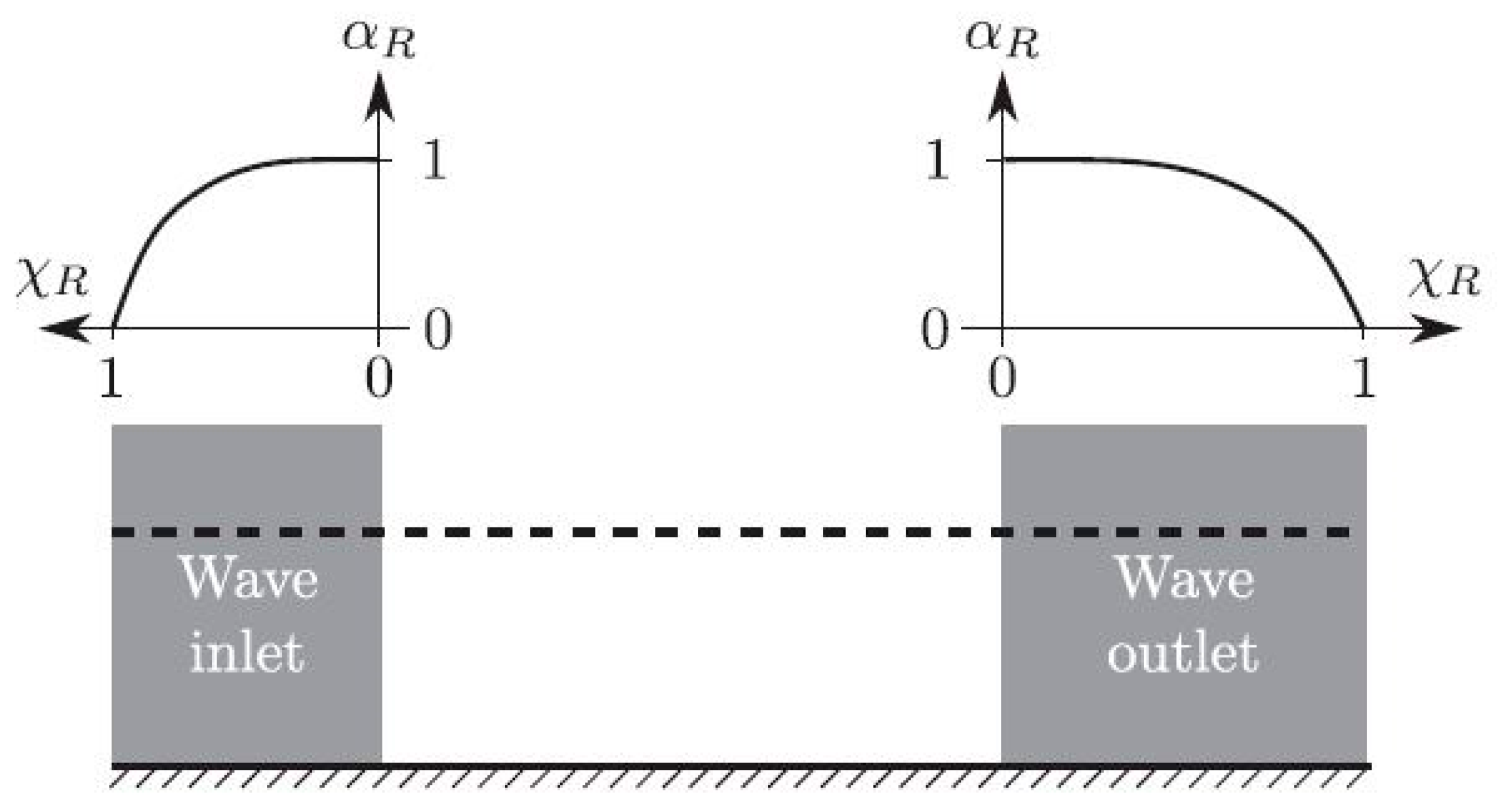
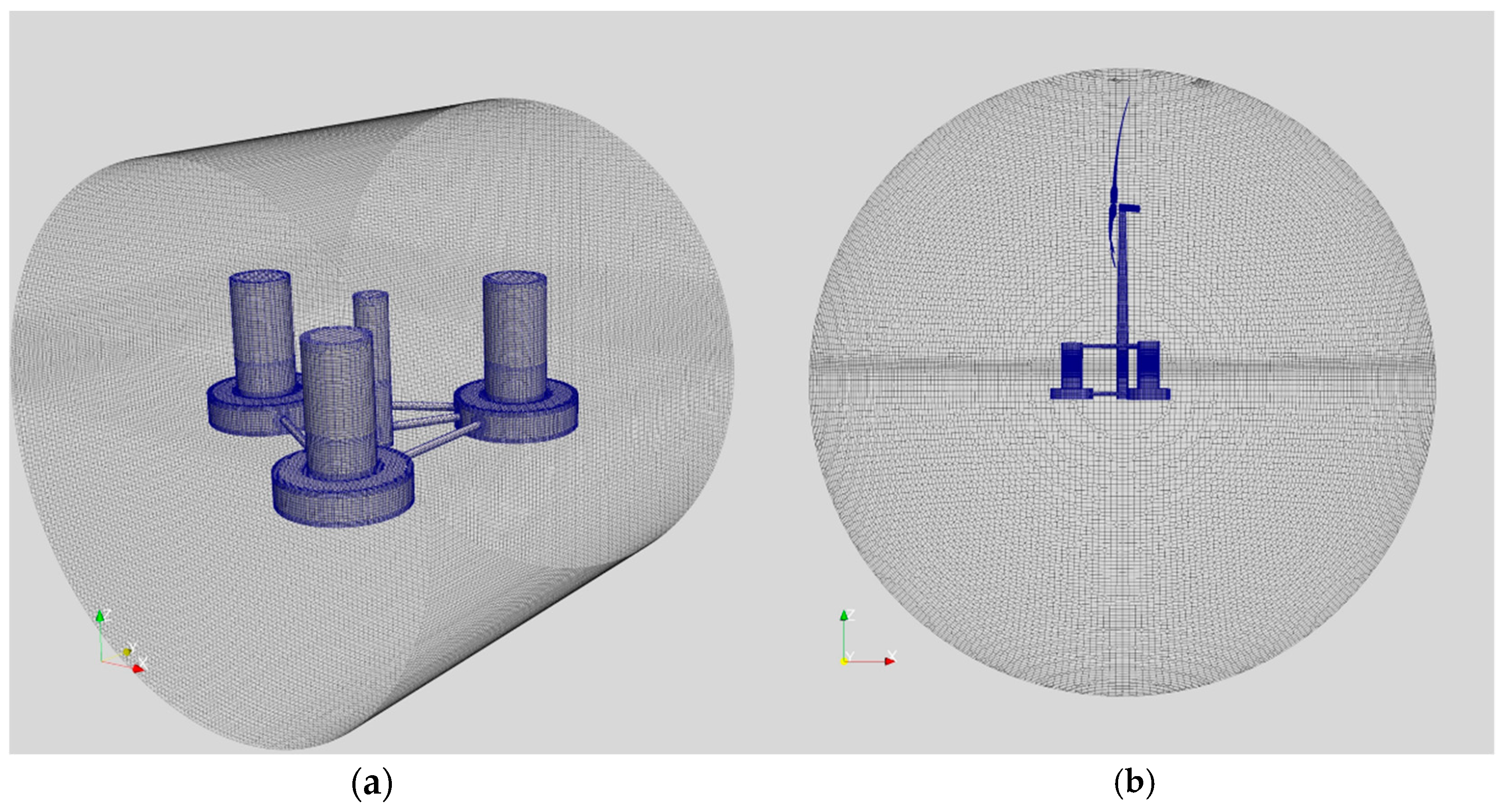
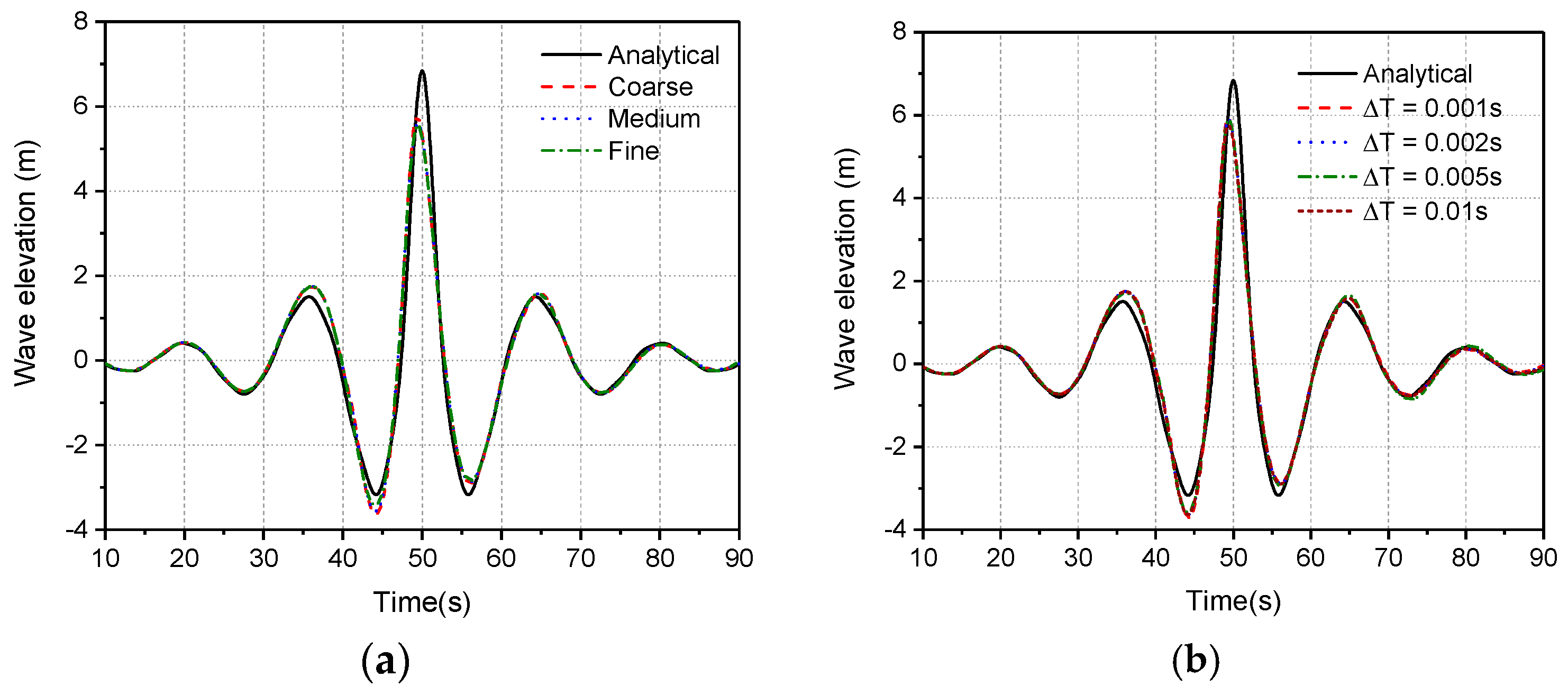
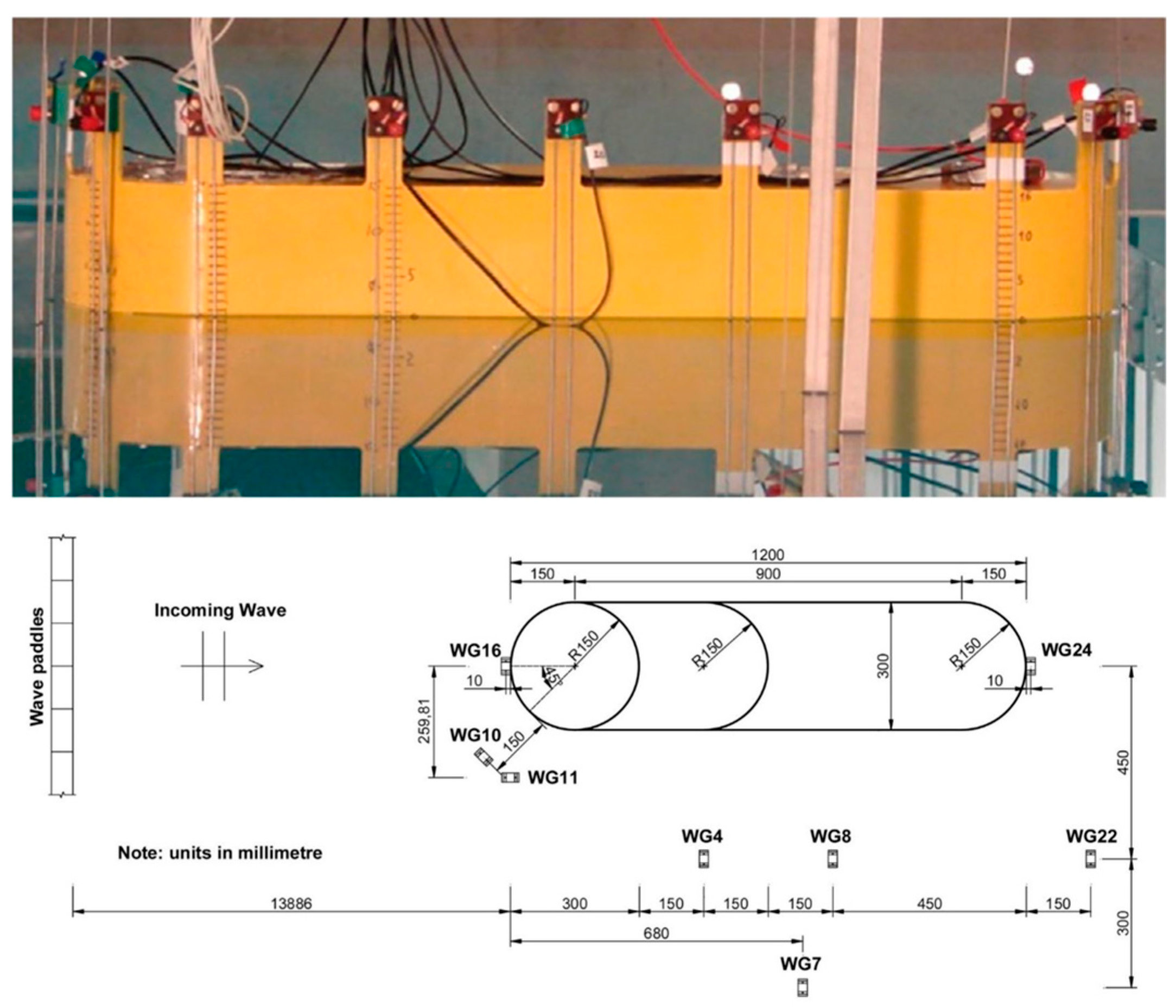
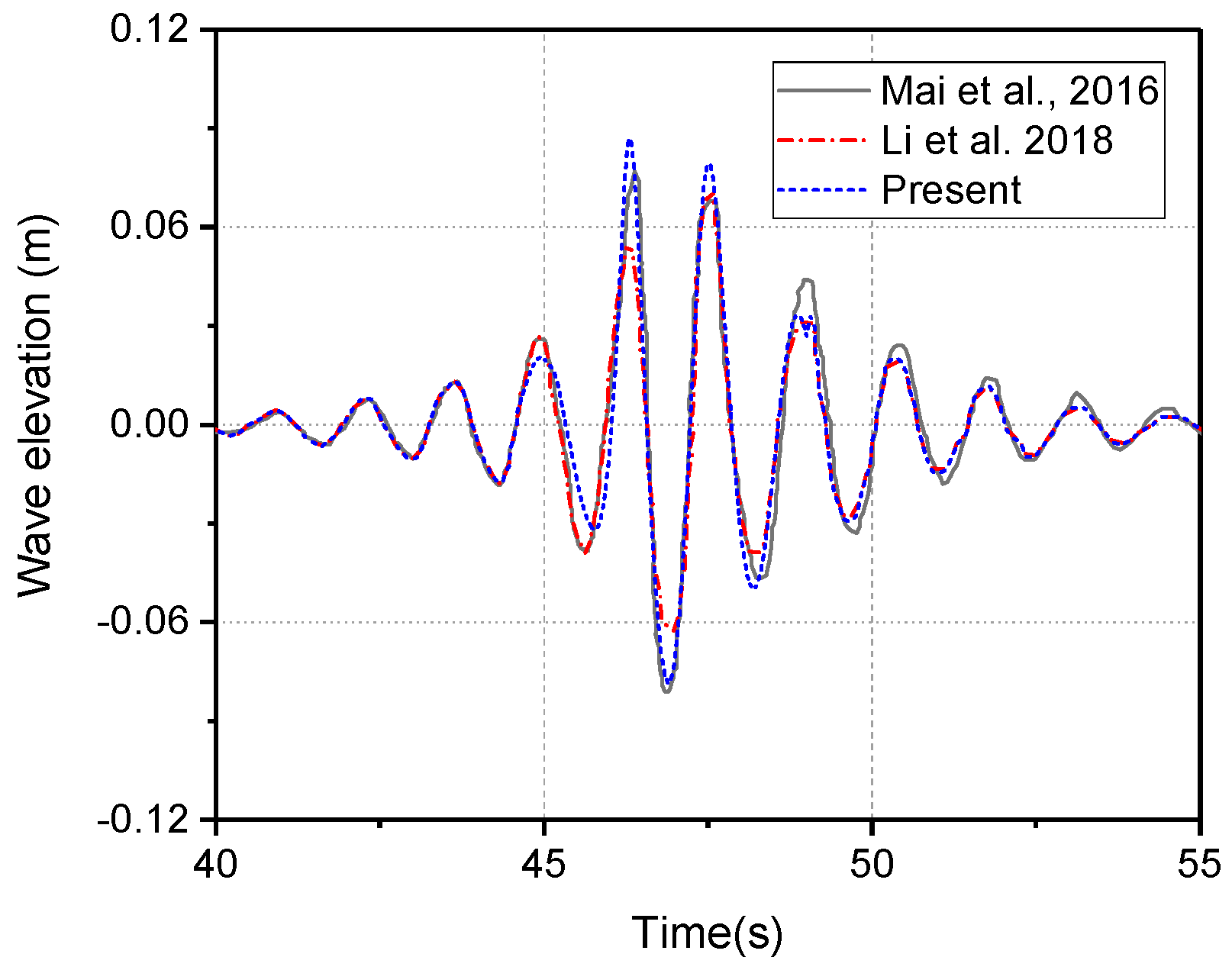
Section 3, the verification cases are presented which include a focused wave generation in a numerical wave tank; a wave-structure interaction study on a fixed FPSO subject to a focused wave. In
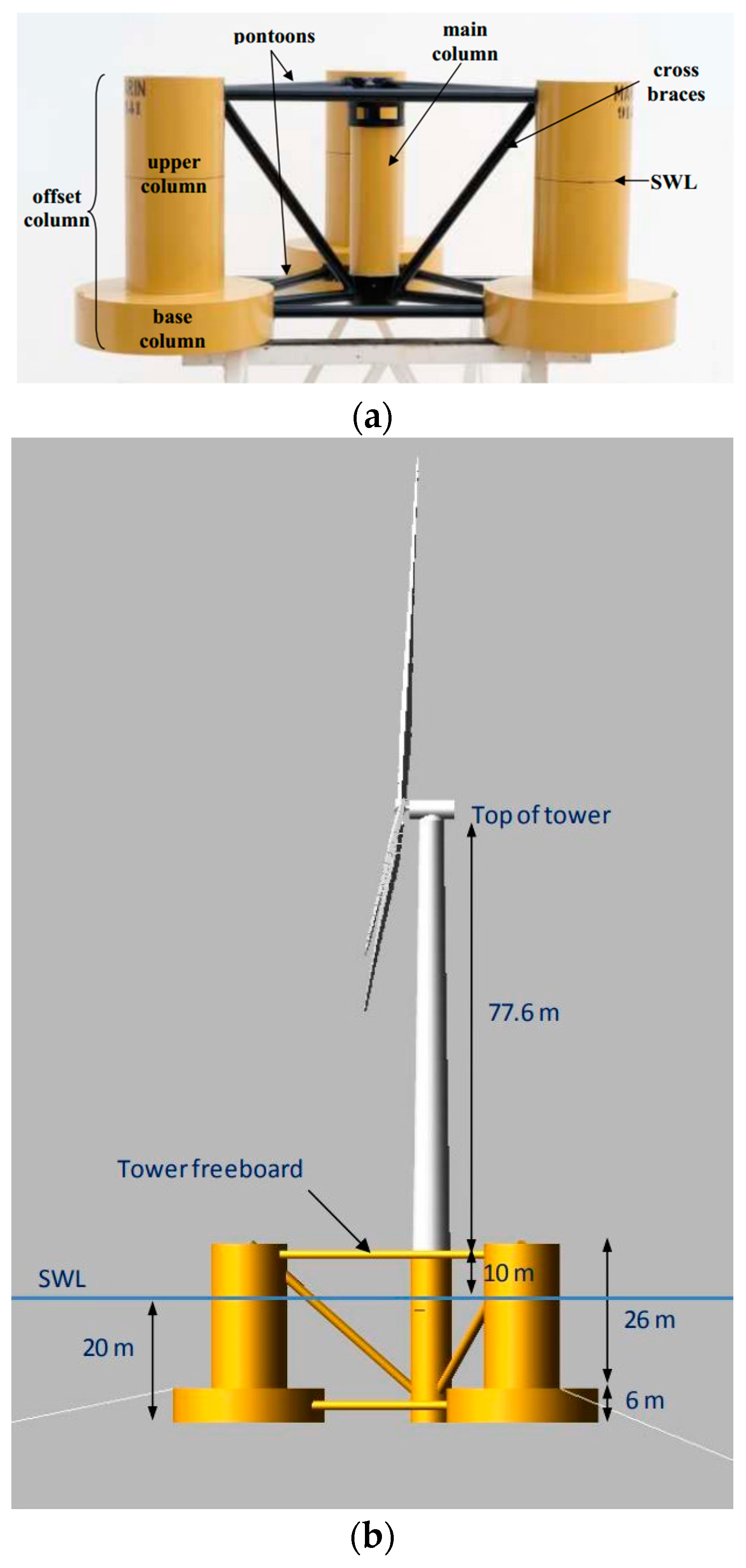
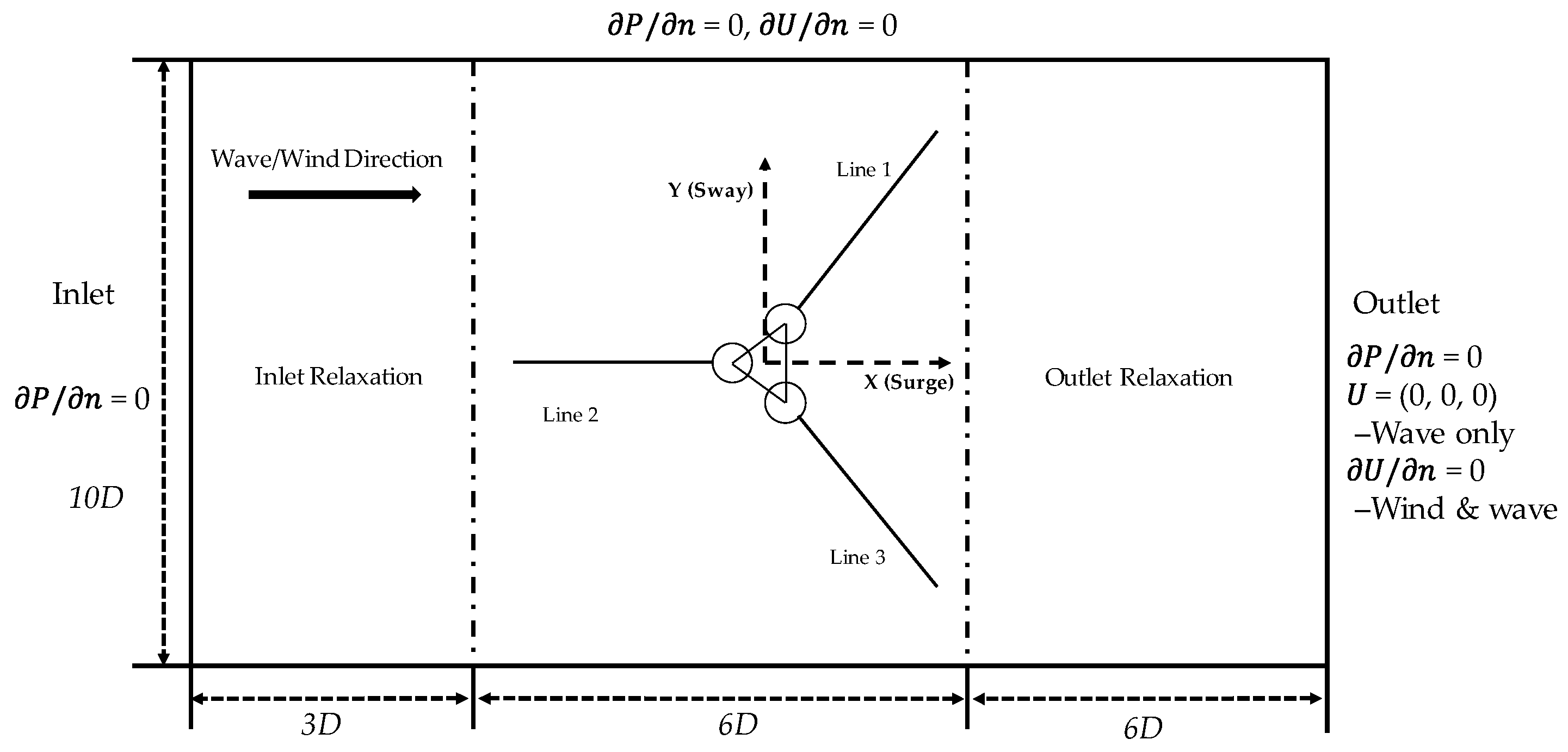
Section 4, the numerical results for the study on an Offshore Code Comparison Collaboration Continuation (OC4) floating semi-submersible platform and a parked floating wind turbine are presented. The results include the hydrodynamic motion response, the inline force, wave run-up and tension loads. The conclusions are drawn in the final section.
4. Potential Flow Theory (EDF)
The results based on a potential flow theory presented in this paper have been obtained using the EDF R&D floating wind turbine aero-hydro-elastic solver CALHYPSO [
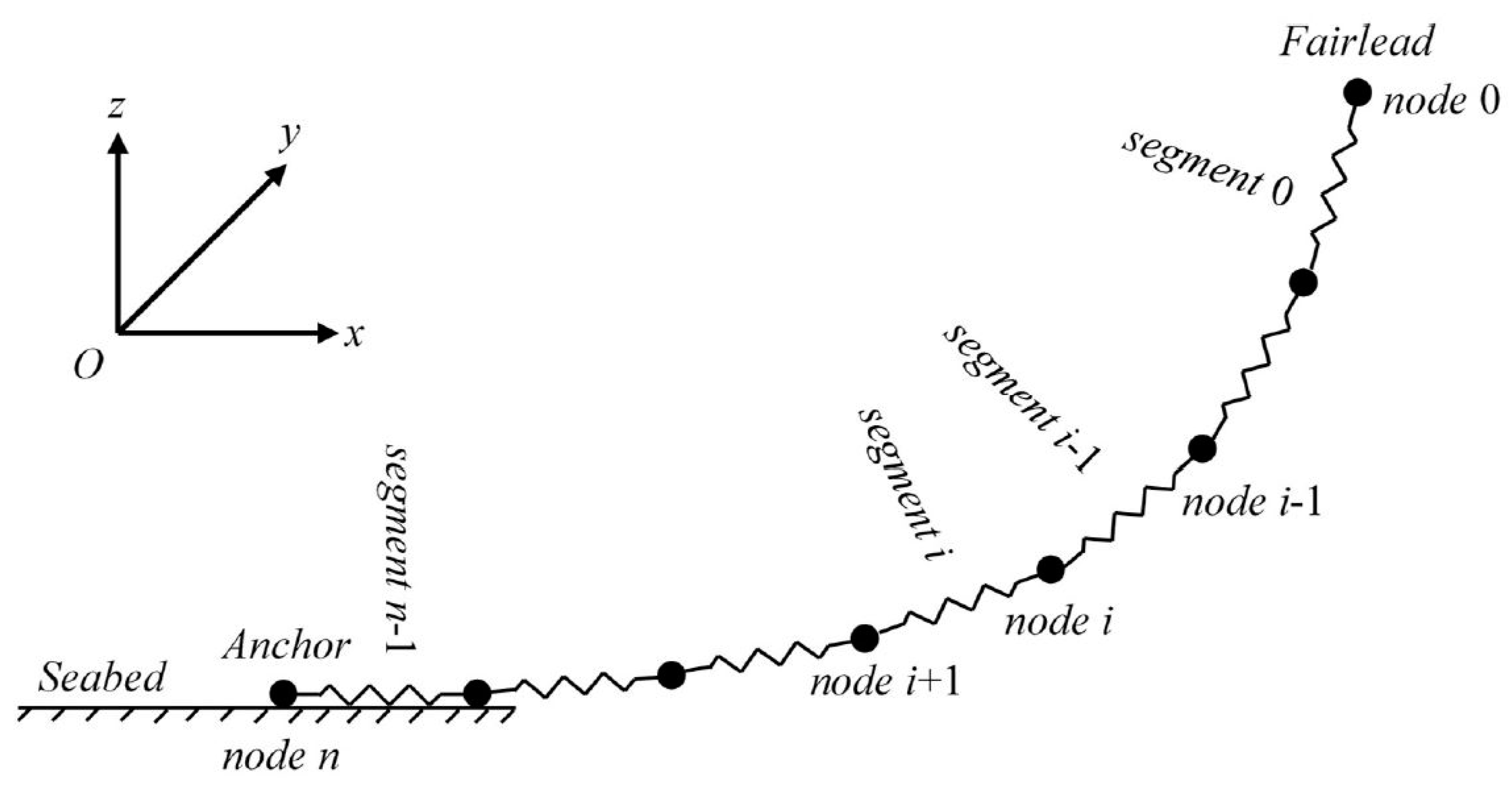
24]. In this paper, only the hydrodynamic part of the code is used. The floater is regarded as a rigid body; only the 6 rigid body motions are solved in the time domain, using a Newmark time marching scheme. For the present paper, mooring lines are regarded as quasi-static, and the catenary equation is used to capture their response to floater motion. As shown in [
32], this assumption is not expected to influence the motions of the floater, but only the tension level in the lines, which are not studied in the paper. The hydrodynamic loads are computed in the frequency domain using the potential flow solver NEMOH, developed by Ecole Centrale de Nantes [
33], which solves the diffraction and radiation problems. Then the Cummins approach is applied for the time domain resolution. The convolution integral is used to account for radiation effects with a time window of 60 s, which is enough regarding the typical RIRF of the floater. Forces are computed up to second order (QTF), and are applied in the time domain without bandwidth limitation. Even if not presented, it has been verified that the sum-frequency QTF has almost no influence on the floater motions, and thus only difference-frequency loads are included in the present model. This result was expected for semi-submersibles. The viscous part of the hydrodynamic force is accounted for using strip theory on all columns and bracings, with homogeneous drag coefficient
Cd = 1. A sensitivity study was carried out on this value, but the motions showed little variations when using
Cd = 0.6 or
Cd = 2. Regarding the wave theory, first-order Stokes waves (Airy theory) have been used to compute the focused wave elevation. FFT is applied on the 200 s long free wave elevation time series obtained with the CFD solver at a reference point (centre of the floater at
t = 0) in order to get the wave components of the focused wave. About 200 significant wave components are extracted for the cases considered here. Amplitudes and phases are then applied as imposed spectrum into CALHYPSO, and it is verified that the free wave elevation is consistent with the inputs. Finally, the modified Wheeler stretching model is applied to compute the undisturbed wave kinematics in the fluid domain. It is noted that wave kinematics are only used for viscous forces, as all other forces are included in the hydrodynamic database computed by NEMOH. The EDF CPU time is 40 s for the 200 s calculations performed in this study.
6. Discussion and Conclusions
The ocean waves may induce complex and significant loads on floating offshore wind turbines; as such, it is essential to investigate the hydrodynamic and structural dynamic response of the FOWT under severe sea states. However, the complicated wave-/wind-structure interaction of FOWT subject to harsh weather conditions pose great challenges for computational modelling. Most numerical studies either idealize the wave as a regular wave or investigate simple geometry. The conclusions obtained are believed to be inaccurate when they are applied to FOWT operating conditions.
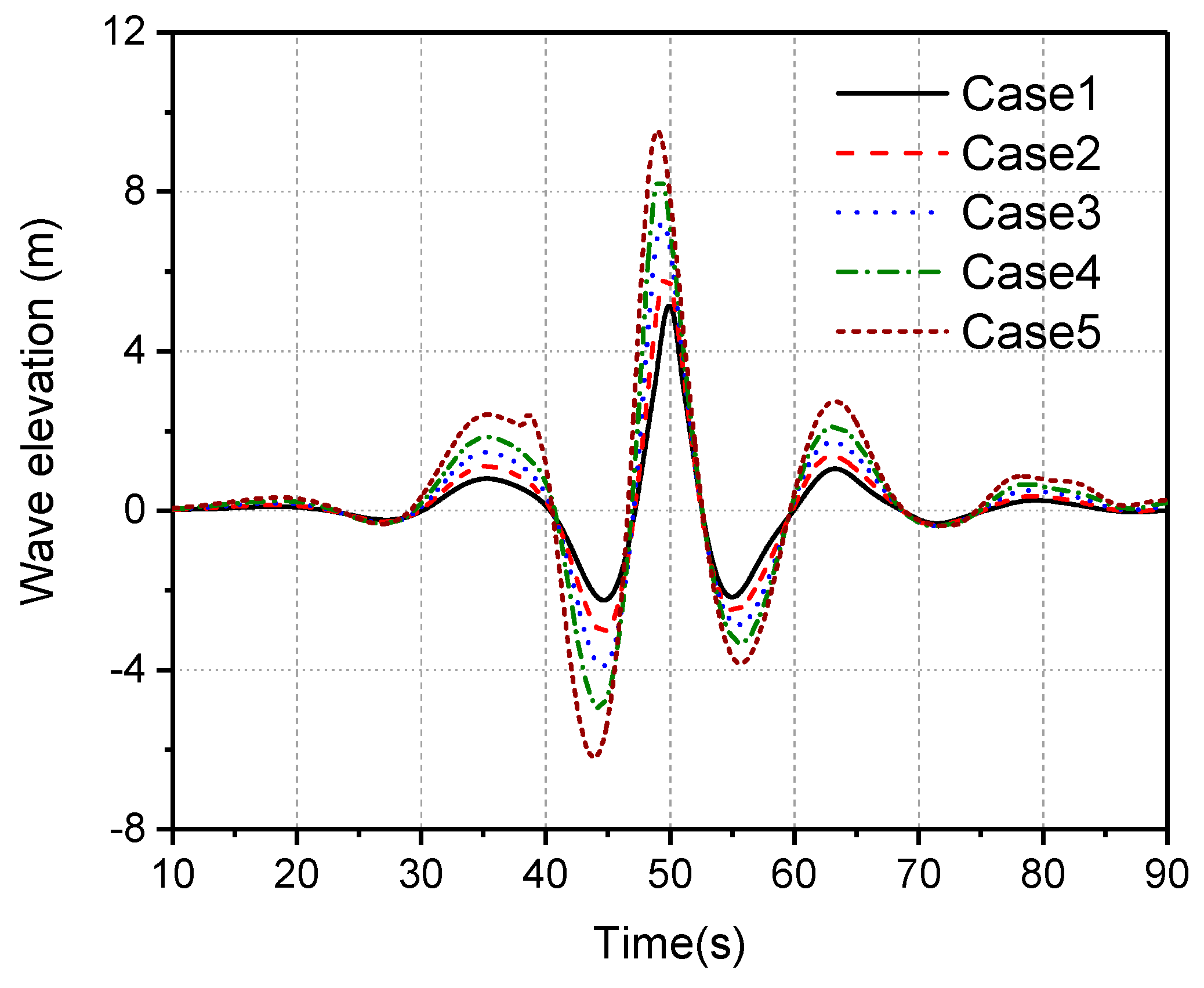
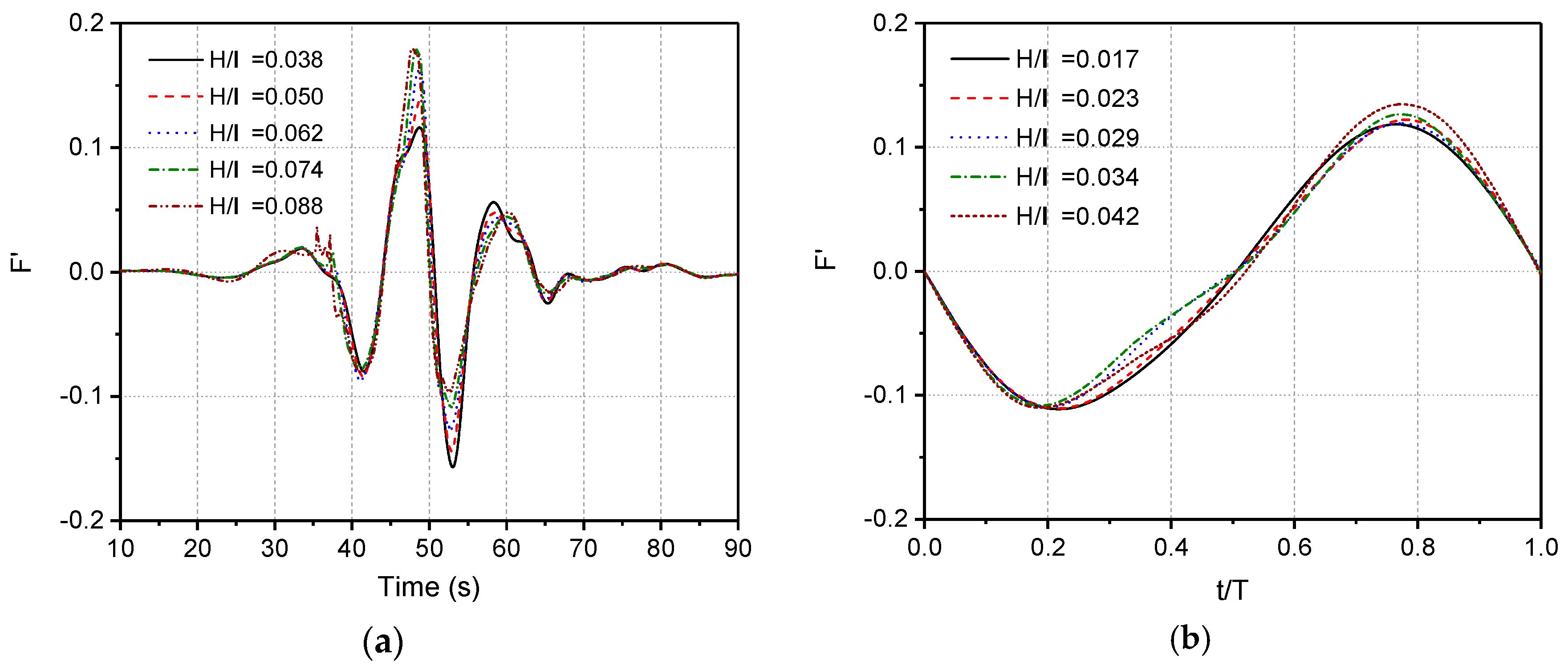
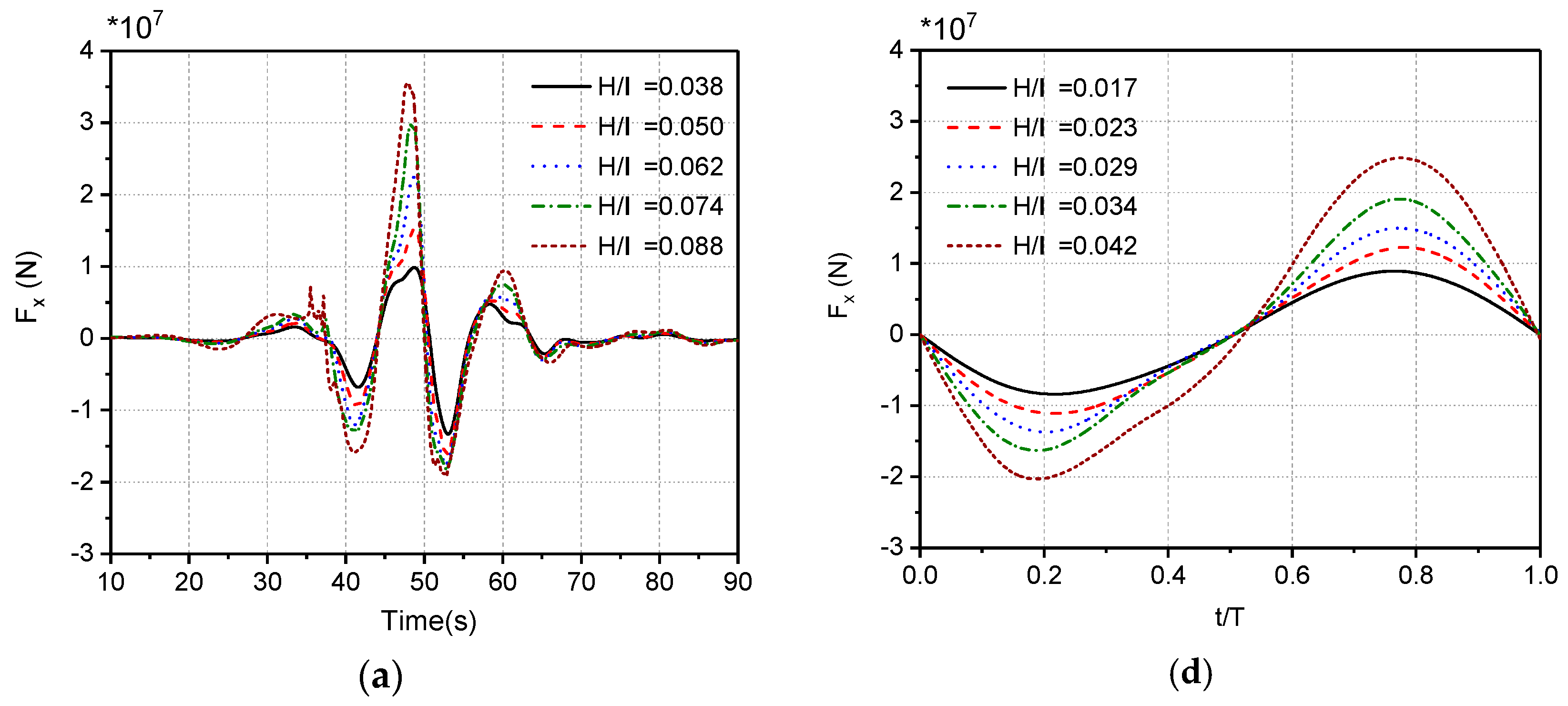
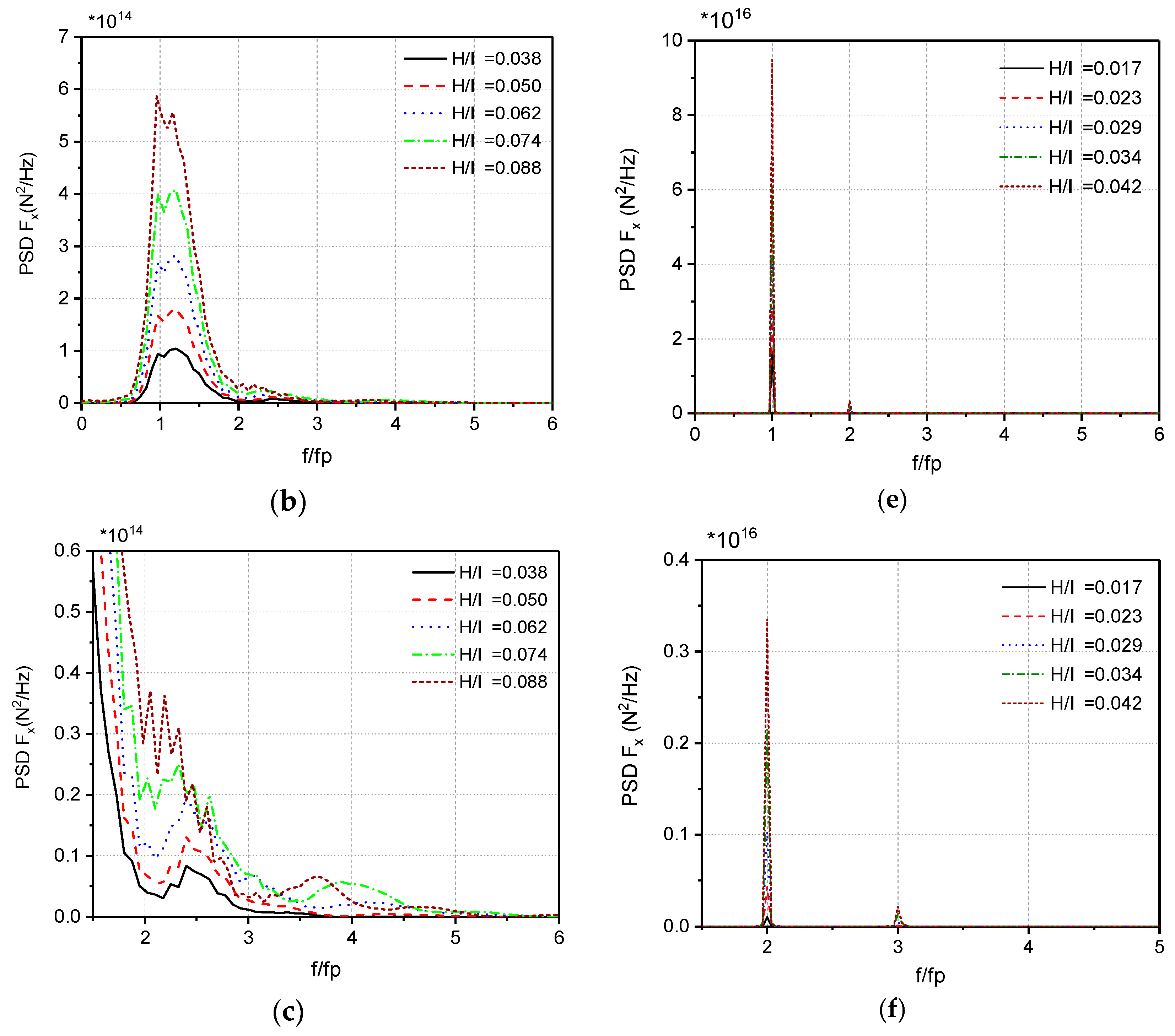
In this study, we have developed a high-fidelity computational fluid dynamics (CFD) modelling tool to study the NREL 5 MW floating offshore wind turbine under focused wave conditions. In this tool, the flow field is modelled by a further developed OpenFOAM-based code, where unsteady Navier-Stokes equation is solved based on a finite volume method. To elucidate the effects of various wave steepness on the hydrodynamic response of the system, we numerically examine a fixed semi-submersible platform, a floating platform with five consistently increased wave steepness for both regular and focused waves.
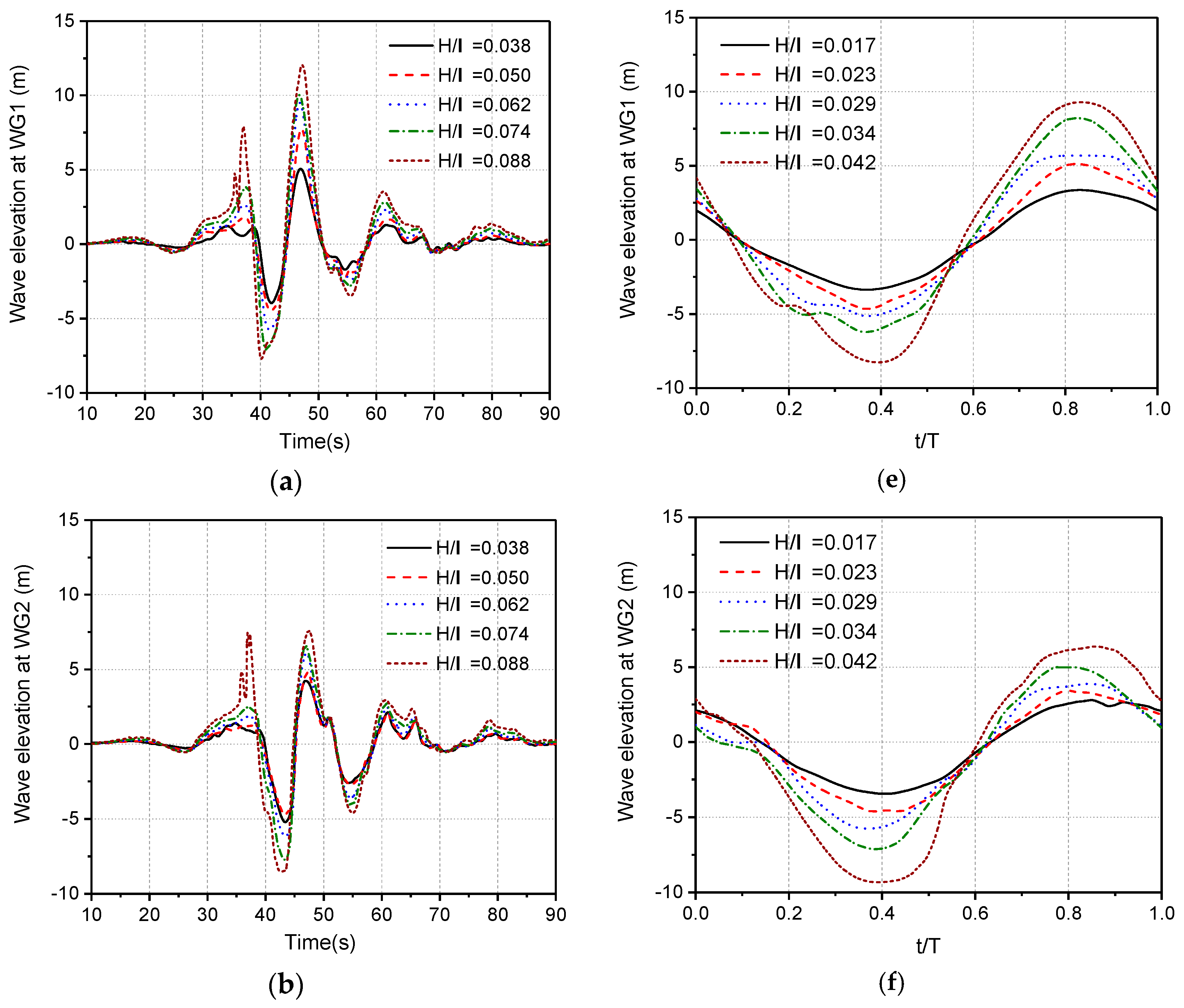
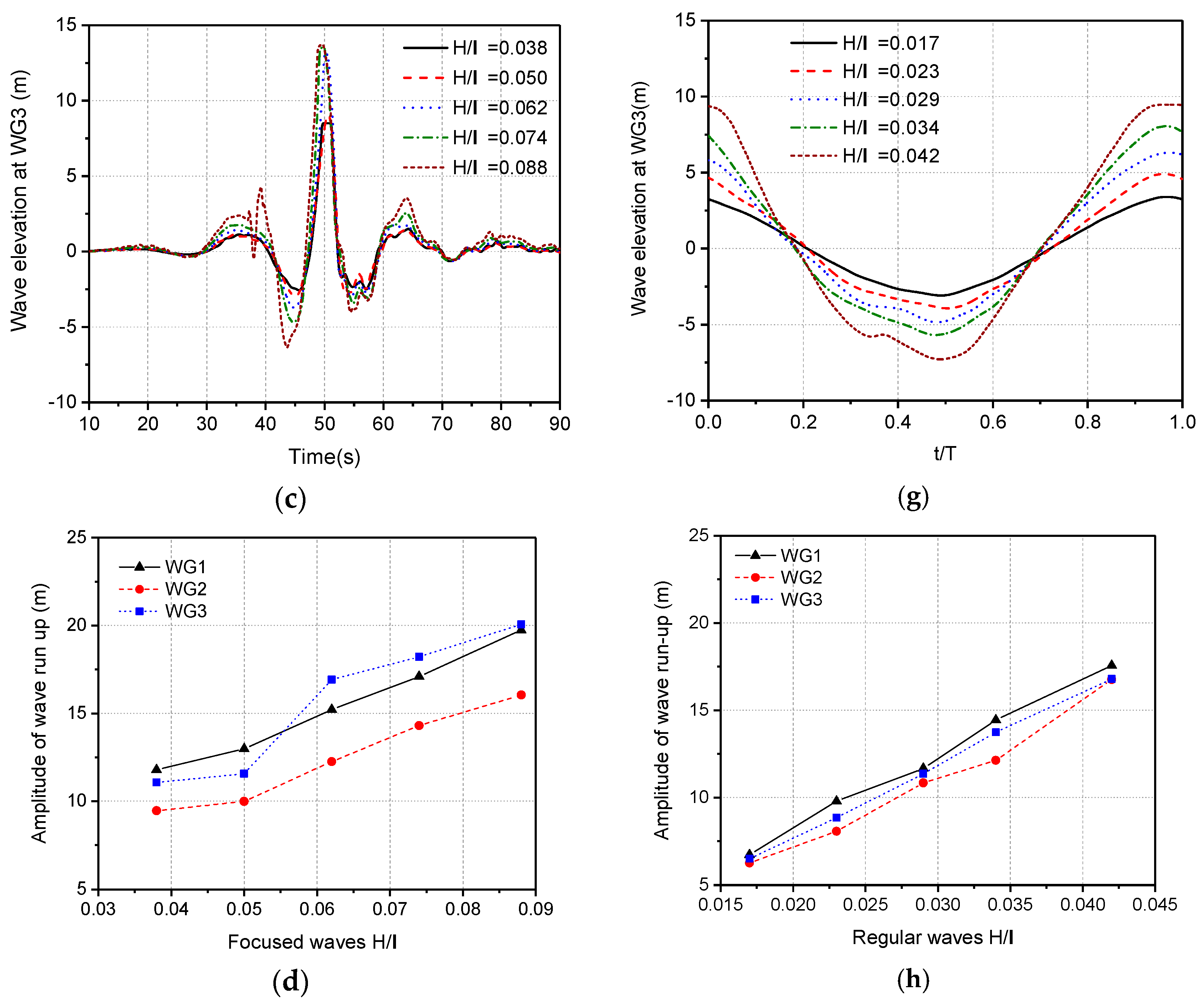
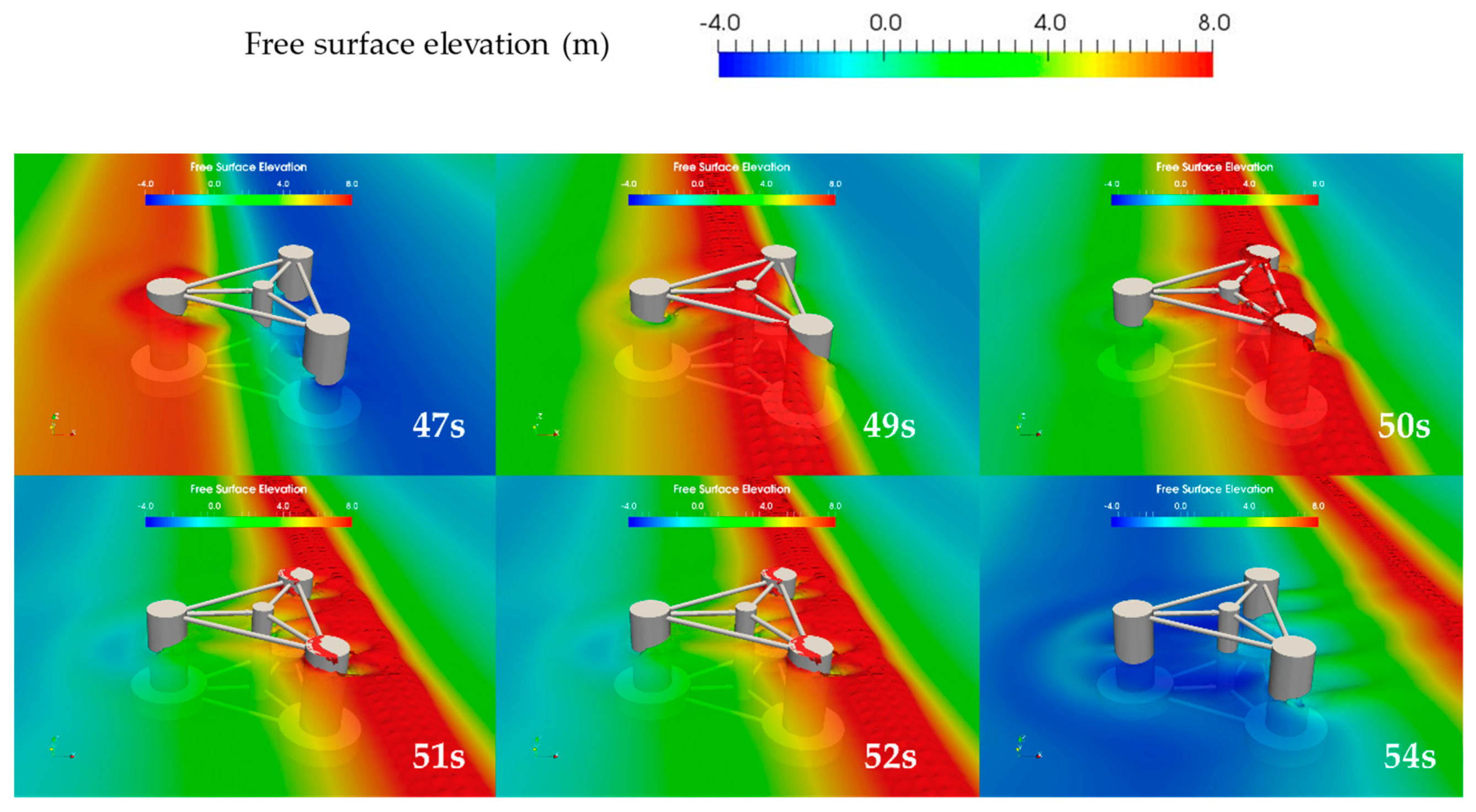
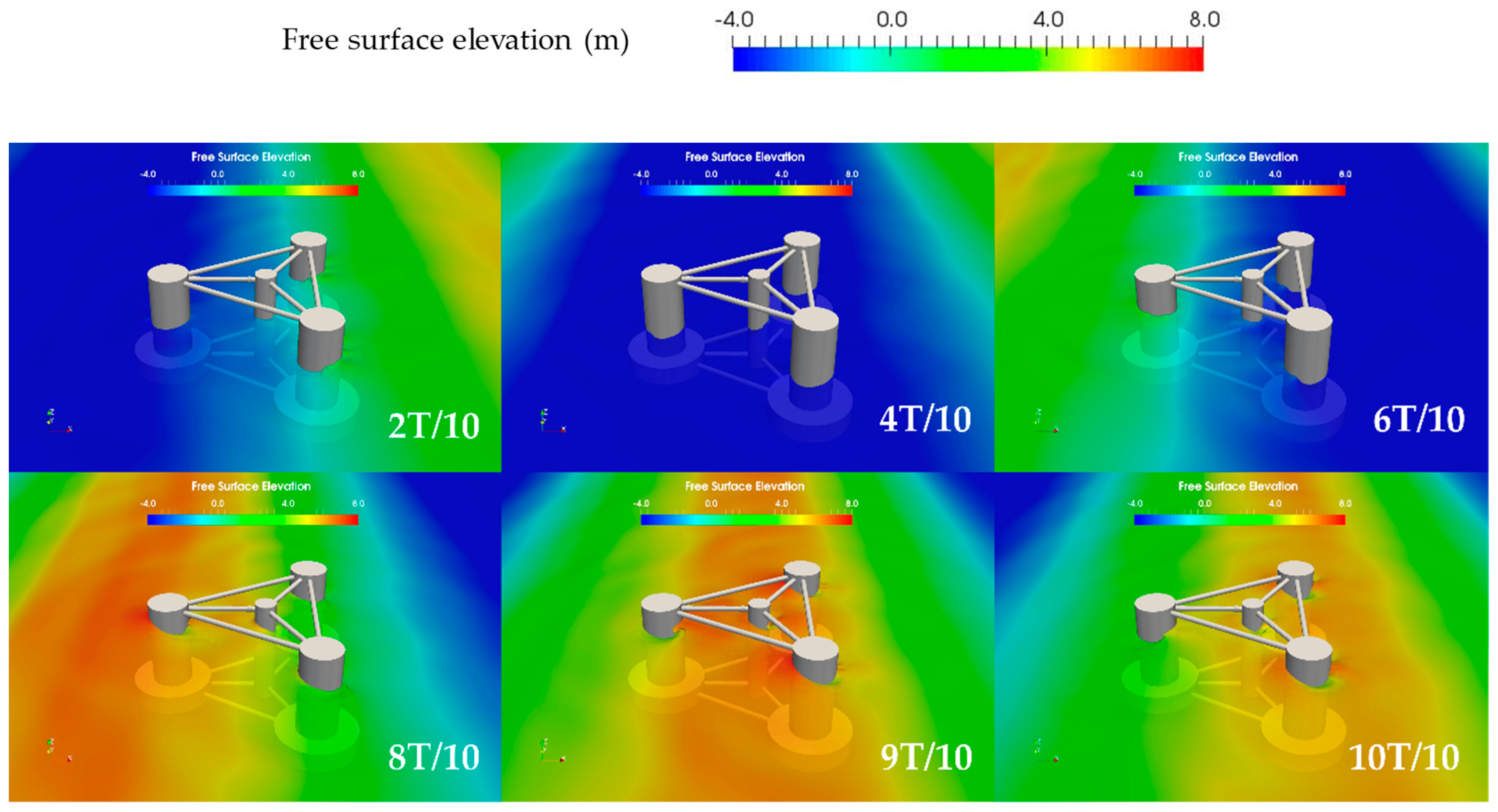
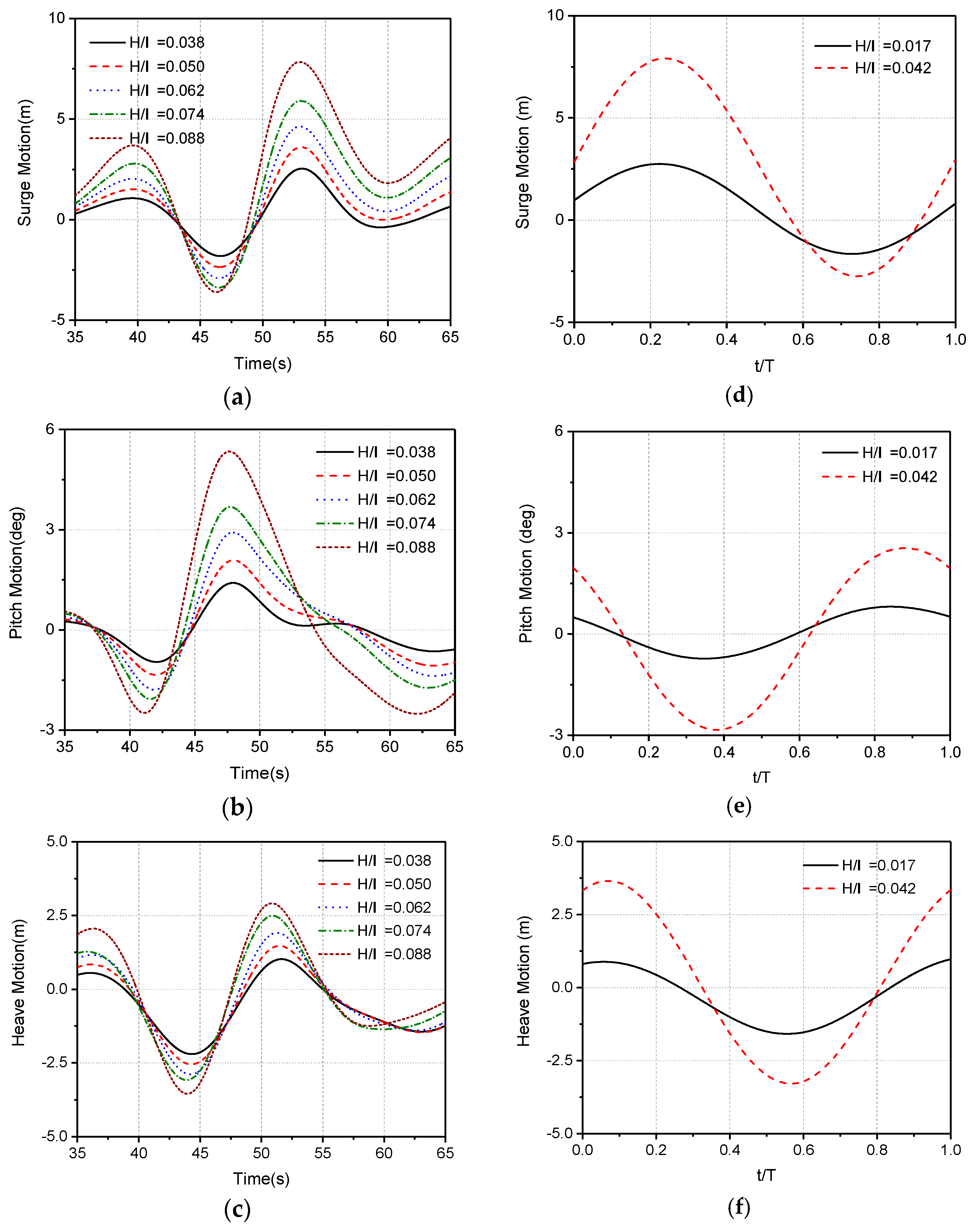
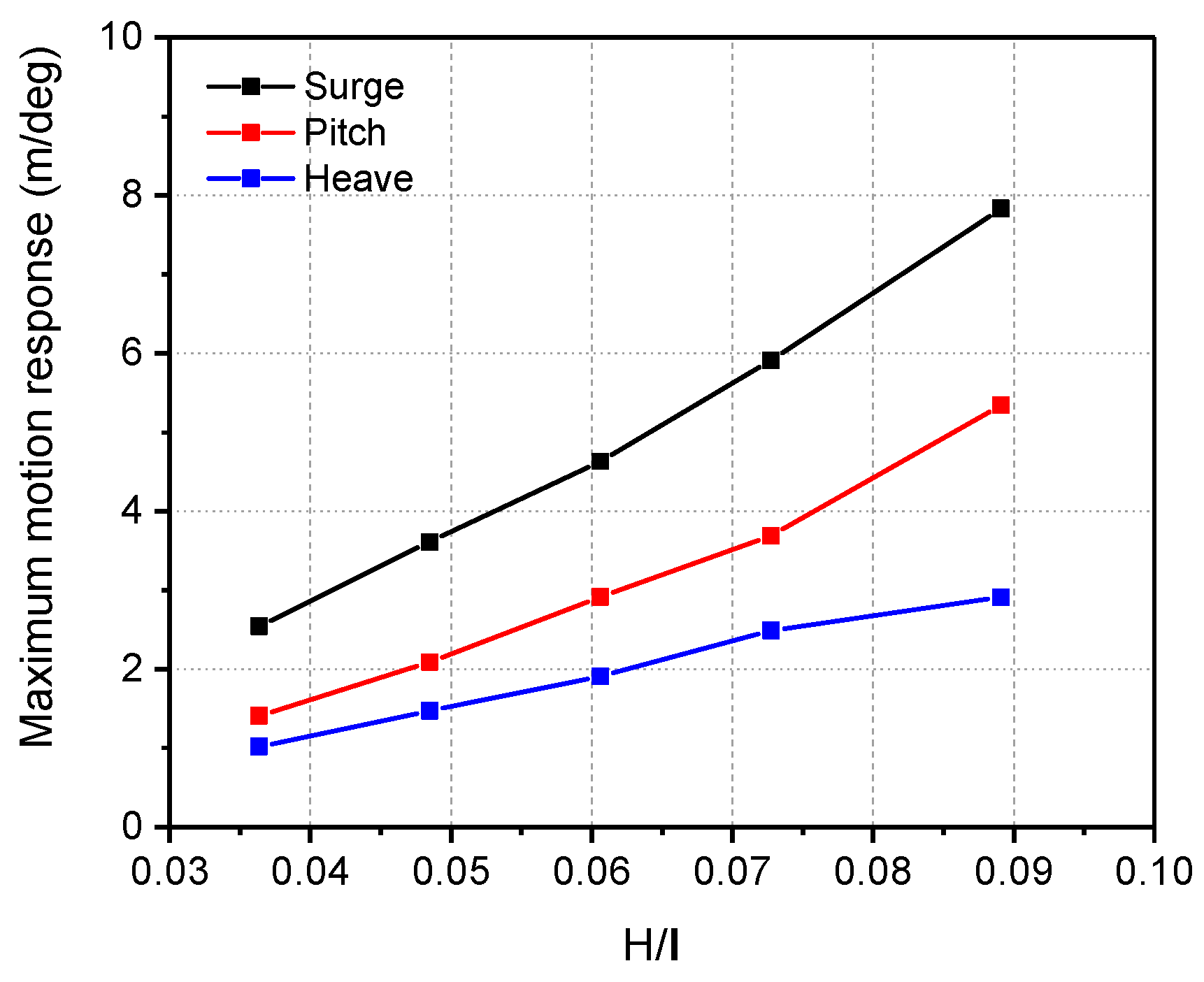
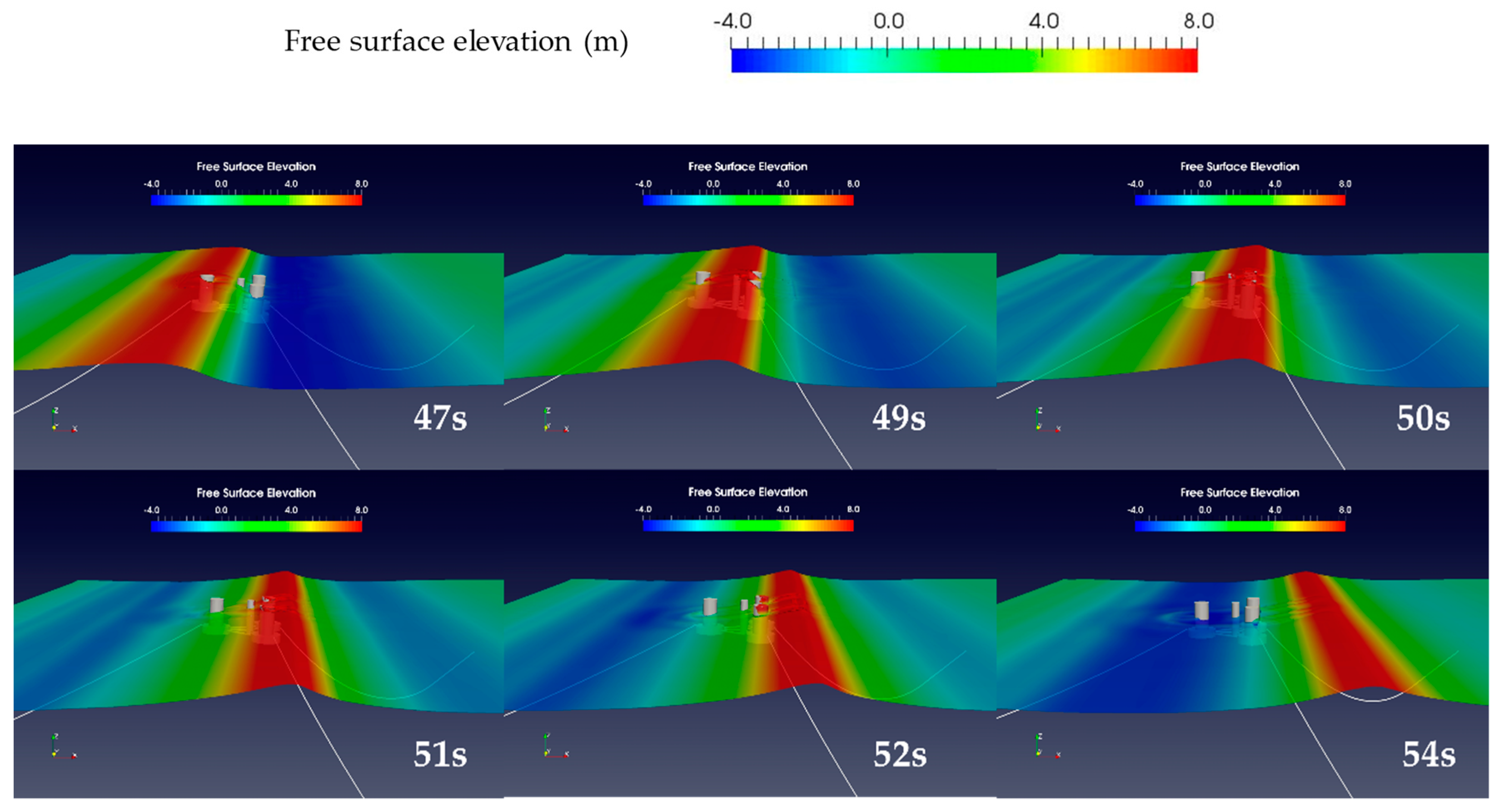
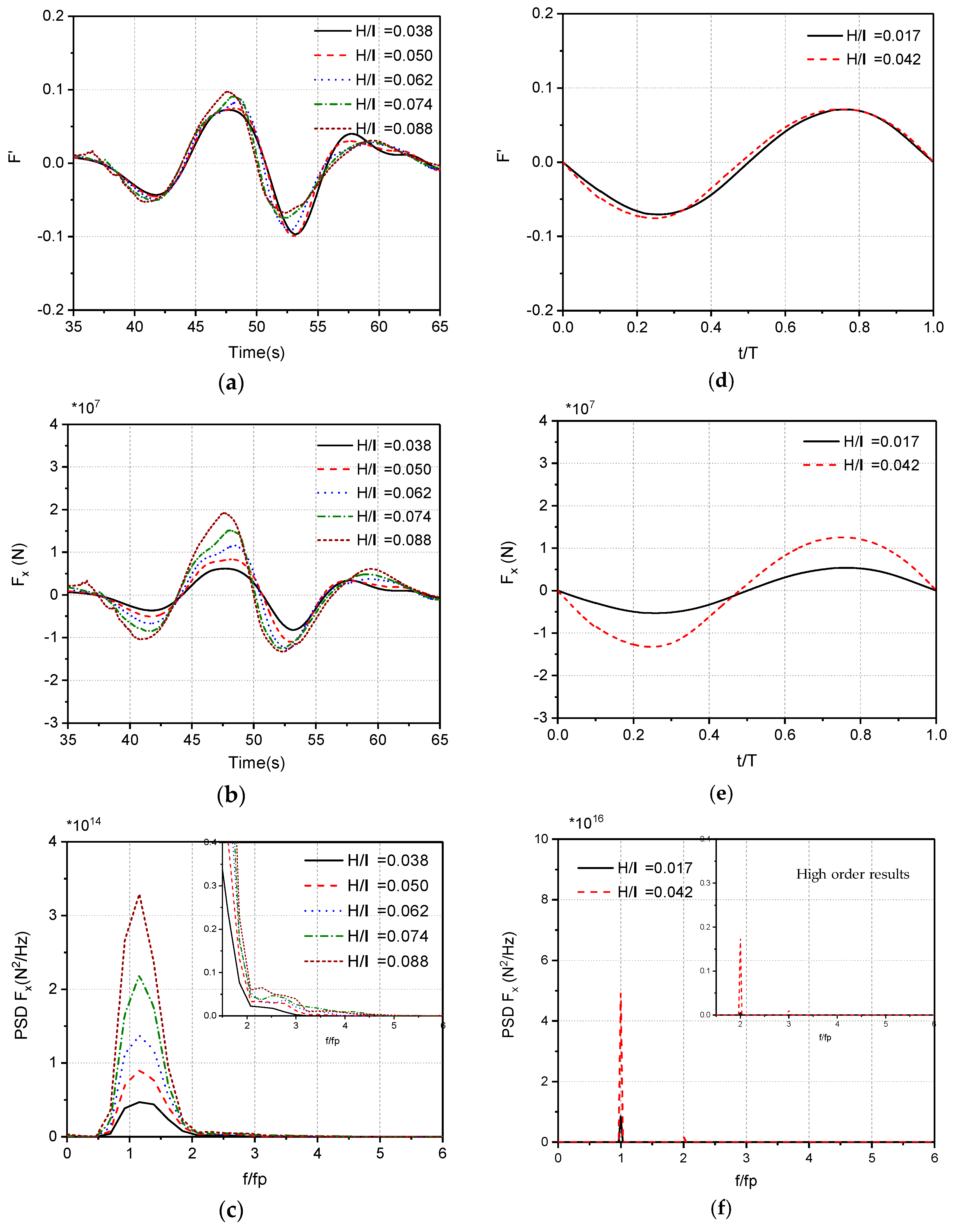
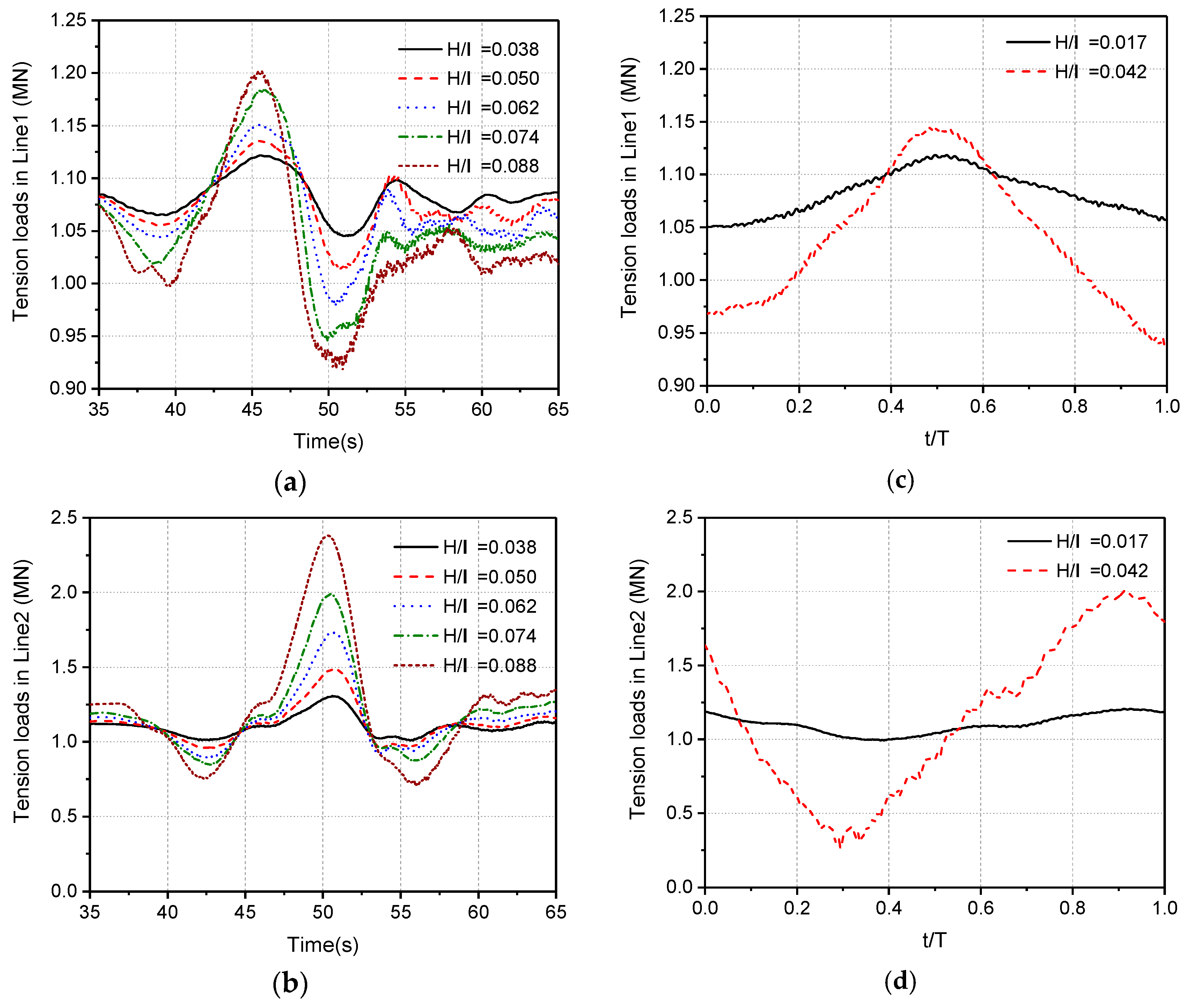
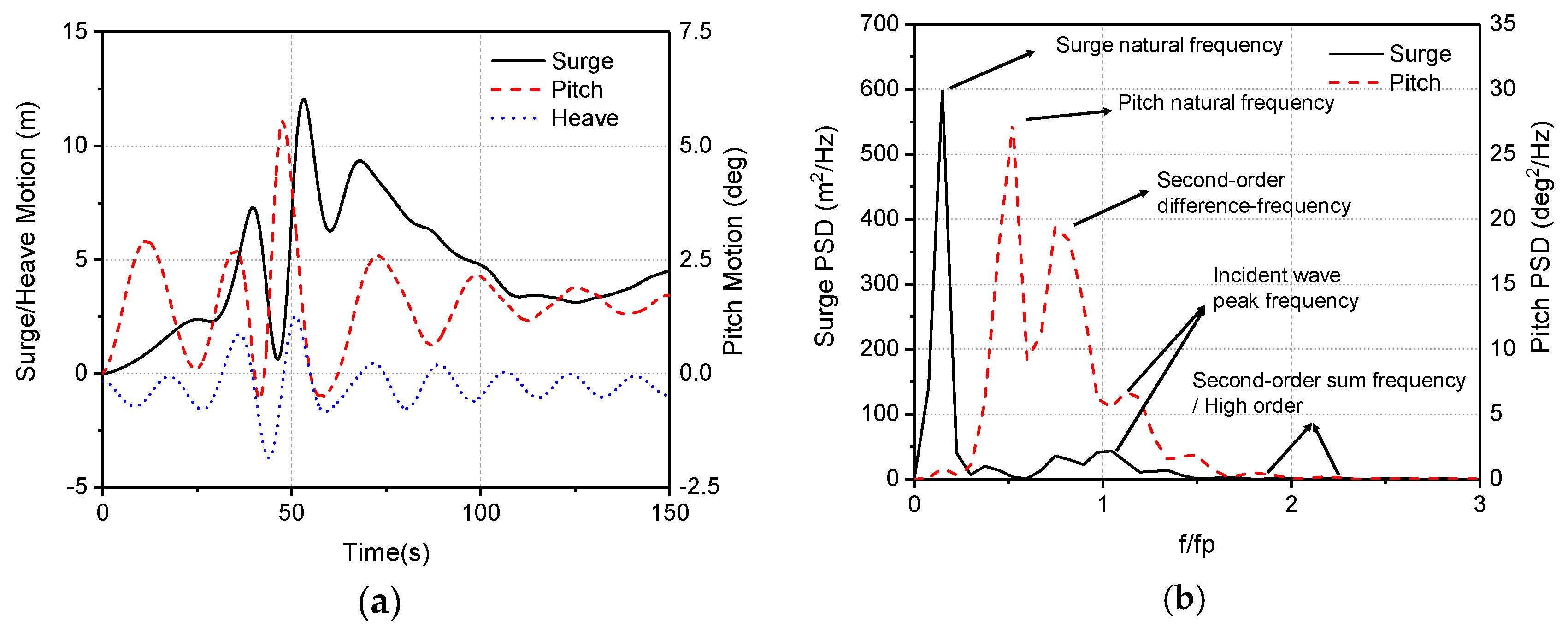
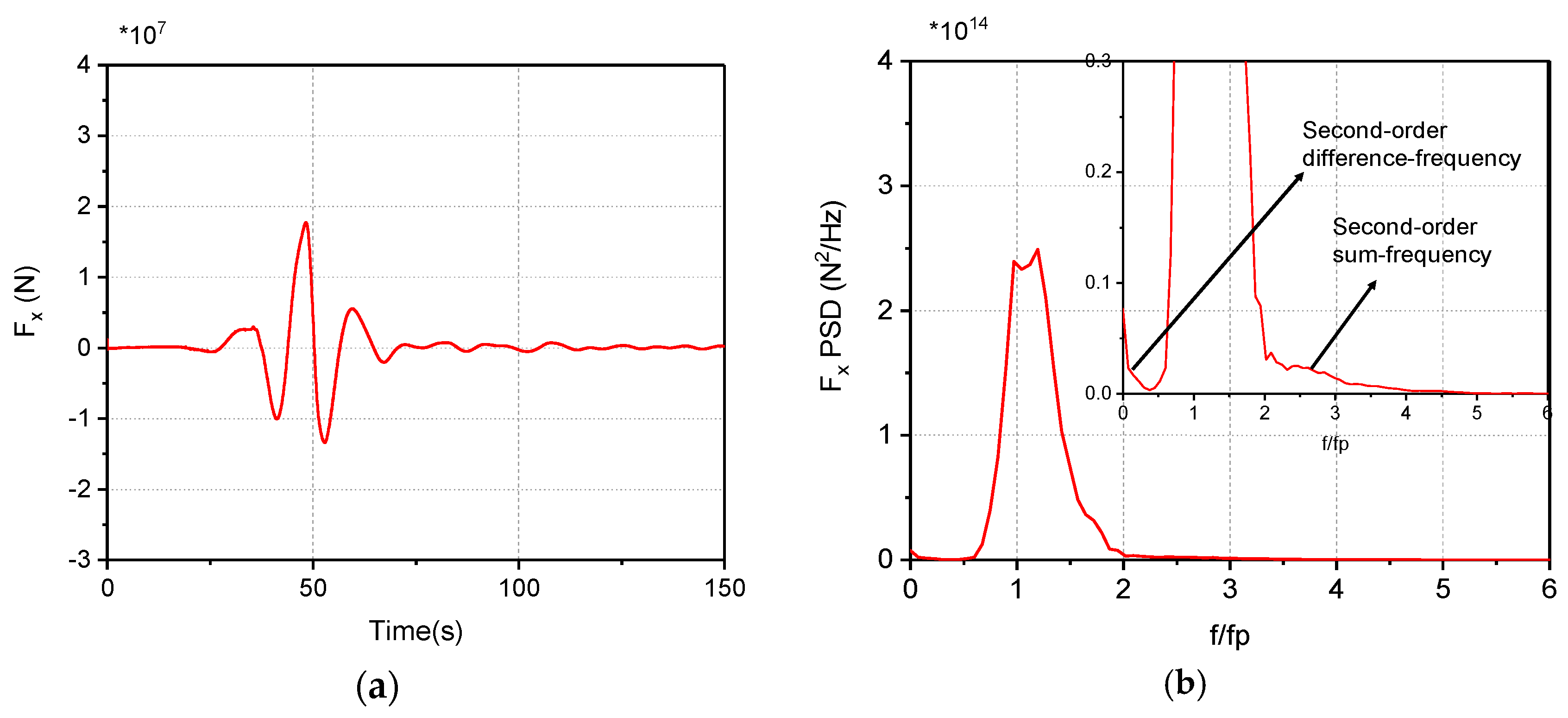
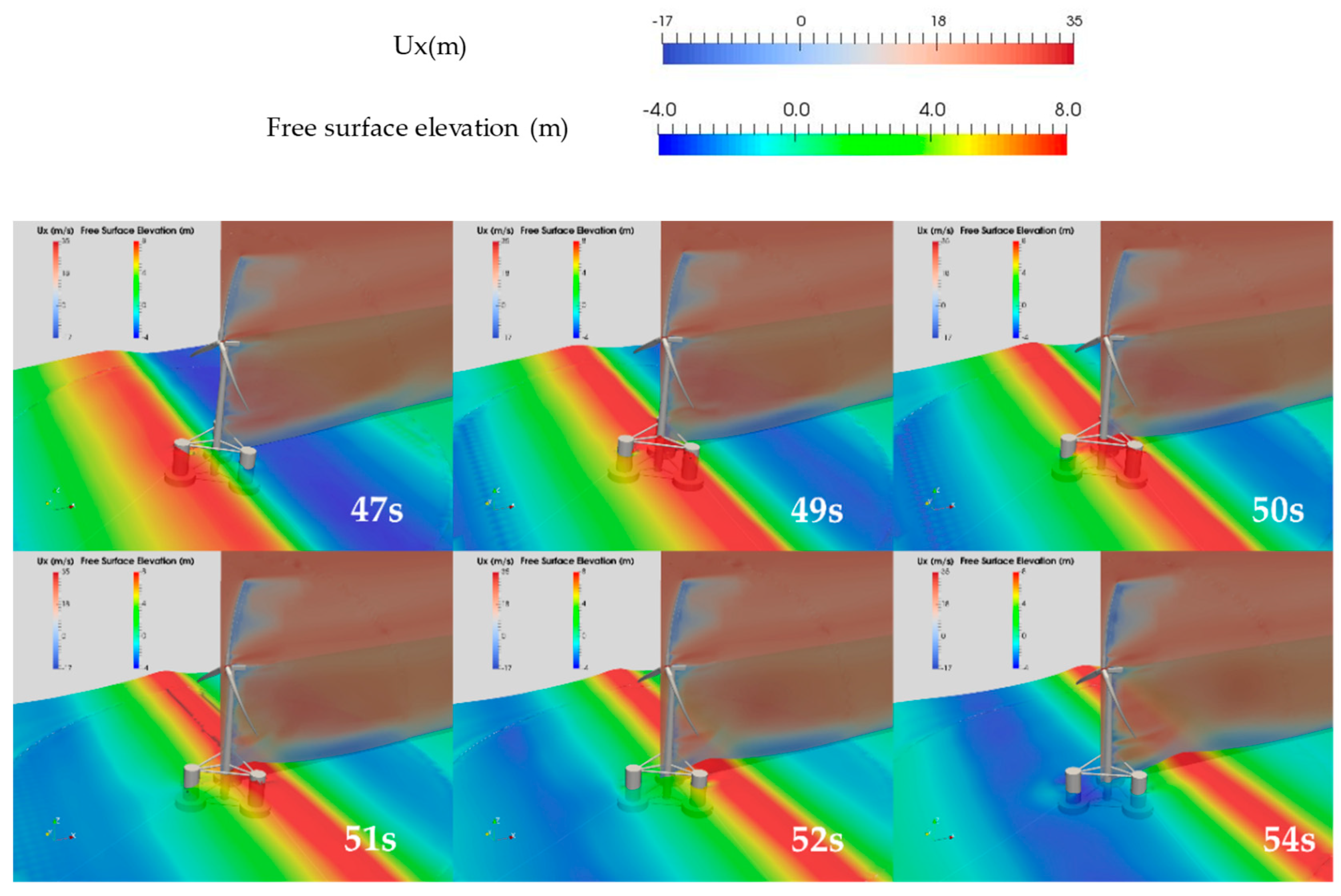
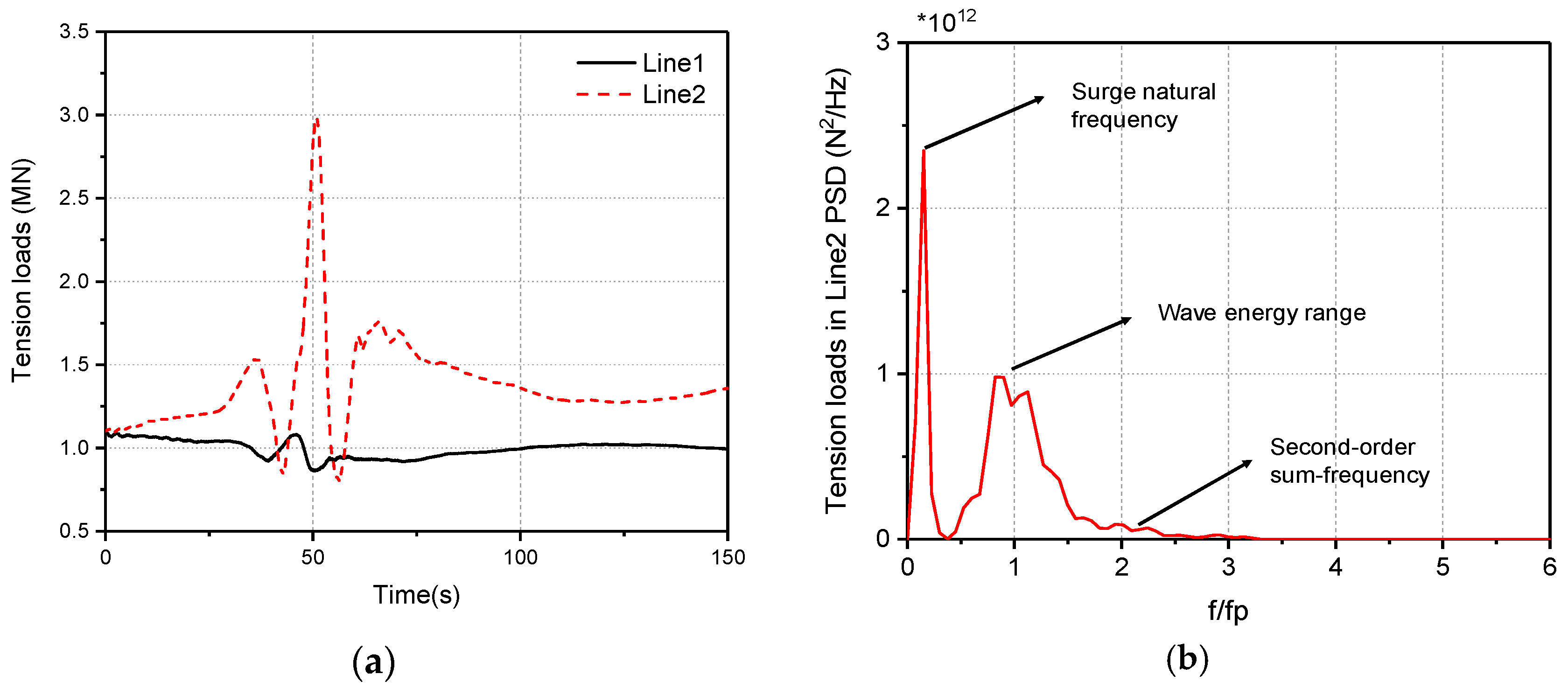
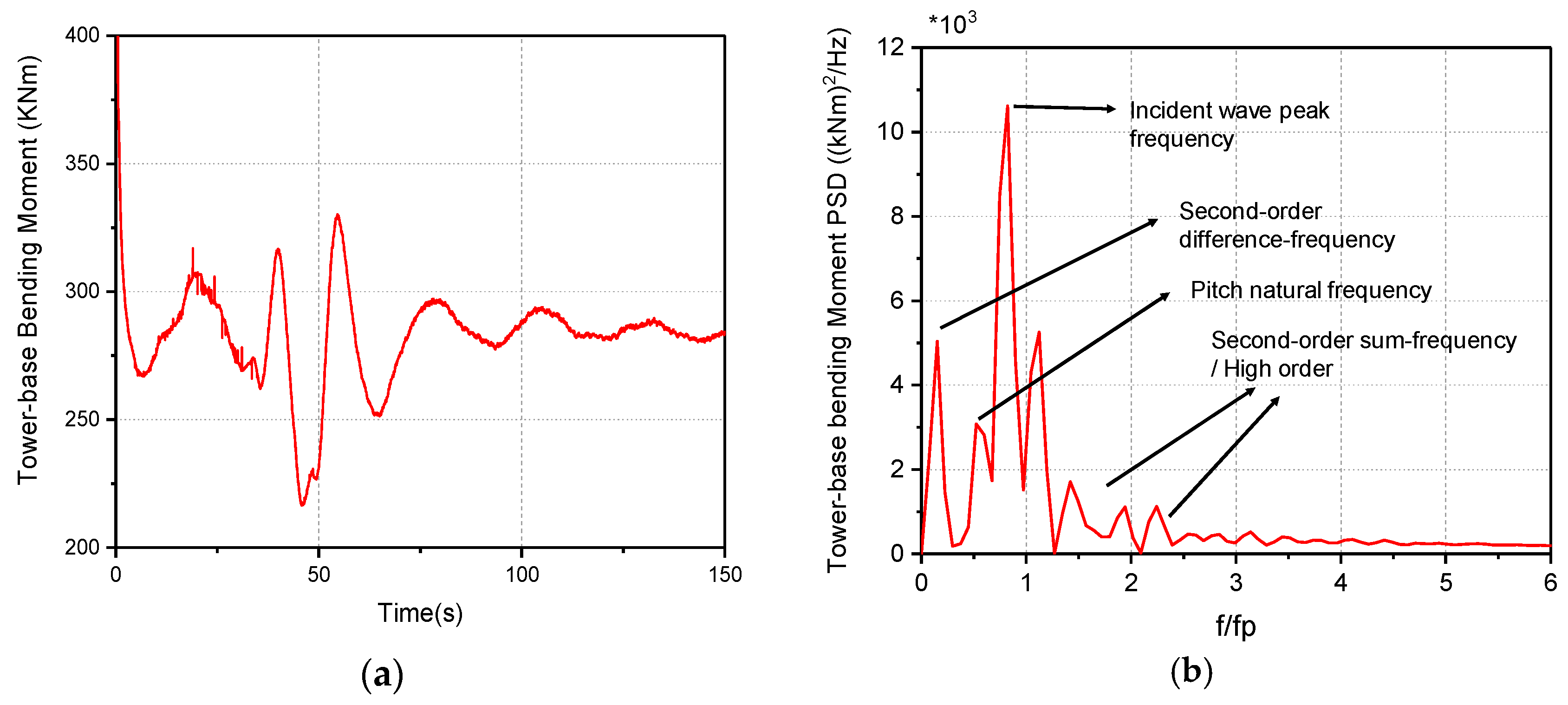
For the results with different wave steepness, the nonlinearity of the motion responses and hydrodynamic loadings becomes significant as the steepness increases, which is clearly indicated through both time and frequency domain analysis. By examining the wave surface elevation CFD contours and digital data, we observed the wave run-up at large wave steepness due to the wave overtopping under focused wave conditions. This further leads to the enhanced peaks of floating platform motion responses in surge, heave and pitch. A comparison between the results from focused waves and regular waves illustrates that, a focused wave causes more violent platform dynamic motions and larger loading than a regular wave. The examination of a parked NREL 5 MW with a maximum wave steepness and a constant wind speed at cut-off condition illustrates a complex unsteady flow field in the turbine wake. Both the tower bending moment and mooring tension loads present dynamic responses at several frequencies, corresponding to the first-order structural nature frequency, second-order and higher-order frequency, indicating the existence of system nonlinearity.
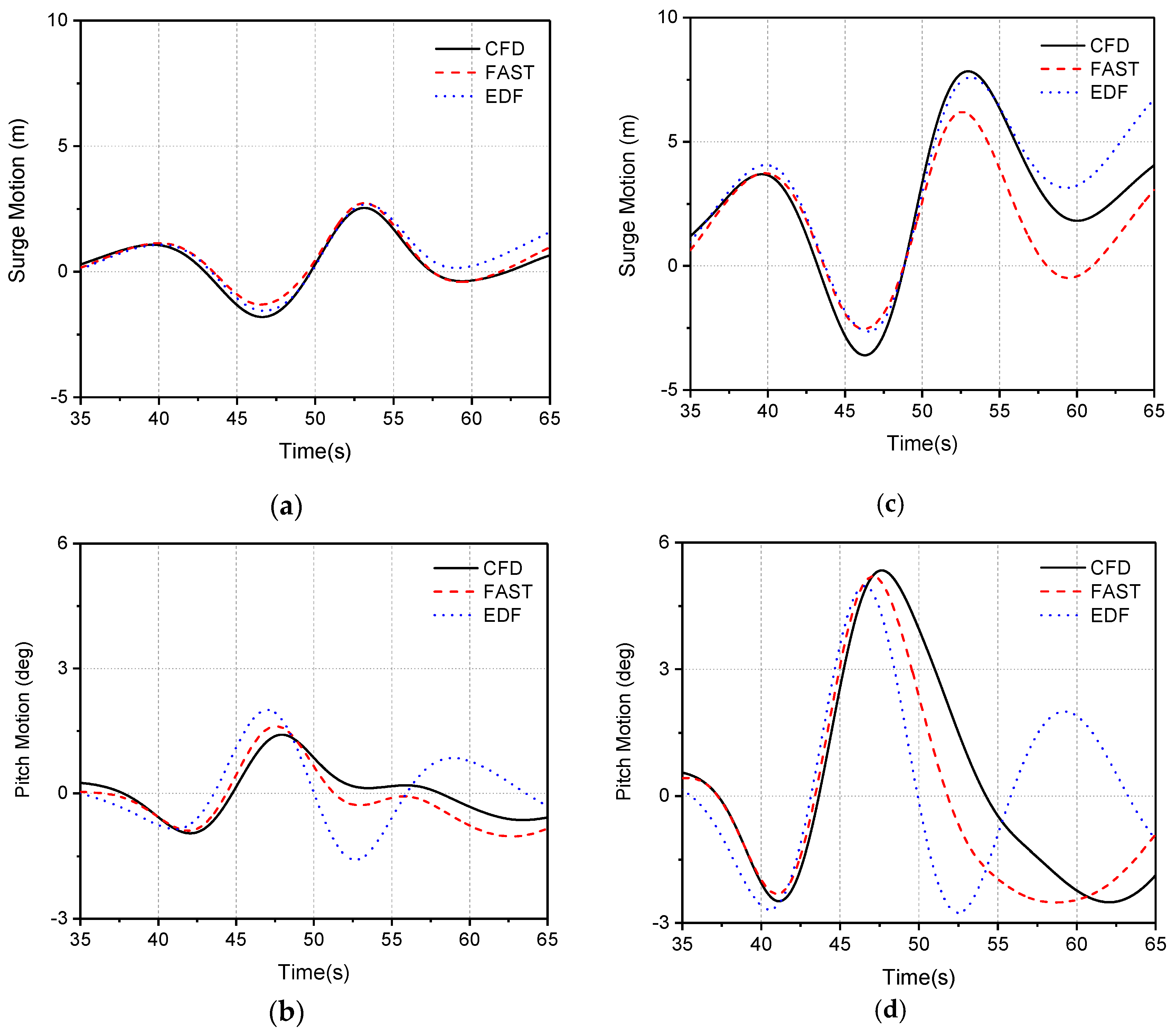
To justify the differences between the results obtained from a high fidelity CFD modelling and that from the reduced-order potential flow theory tools, we compare our results with those using EDF in-house potential flow code and NREL FAST. In general, the results are in agreement before the focused time; the difference becomes obvious after the focused time, and increases as the wave steepness increases. Again, this highlights the existence of disparities for the prediction of the high order hydrodynamic loads and the viscous effect due to the different methods used.


 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}