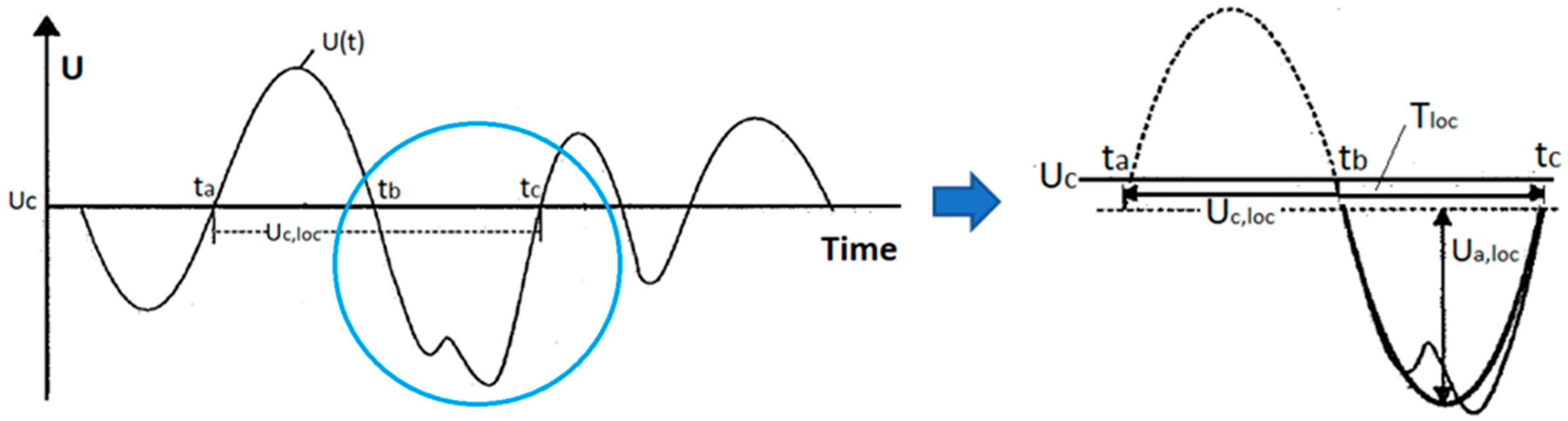
The total length of the numerical model is 250 m with 50 elements. The recommended element length is 50 times that of the cylinder diameter. Dynamic analysis for 3 h of combined wave and current loads is performed. The application of different phase shifts between the harmonic wave components give rise to different time series realizations, with varying maximum wave height and sequence of waves, that both are important factors for the predicted maximum lateral displacement.
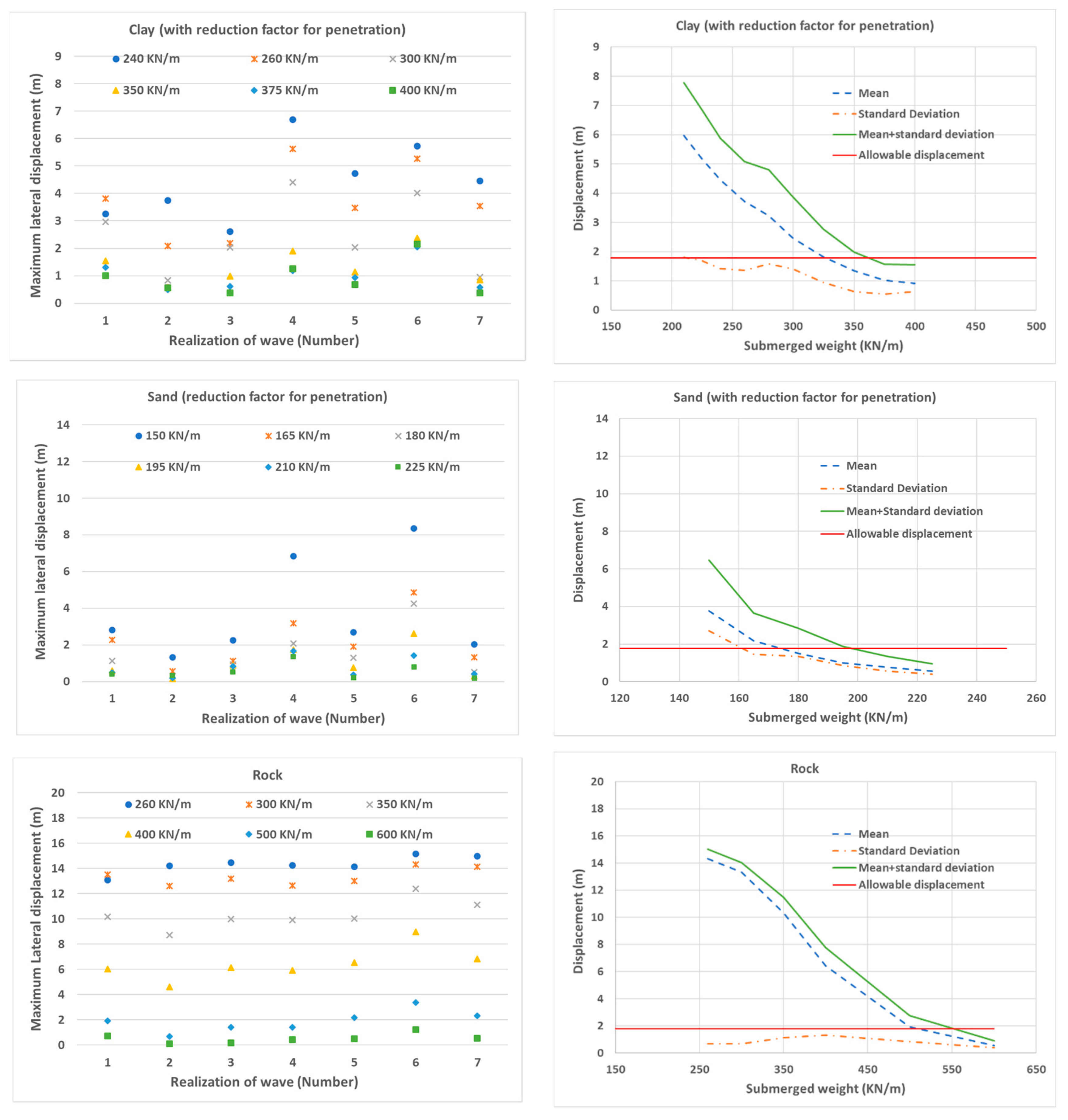
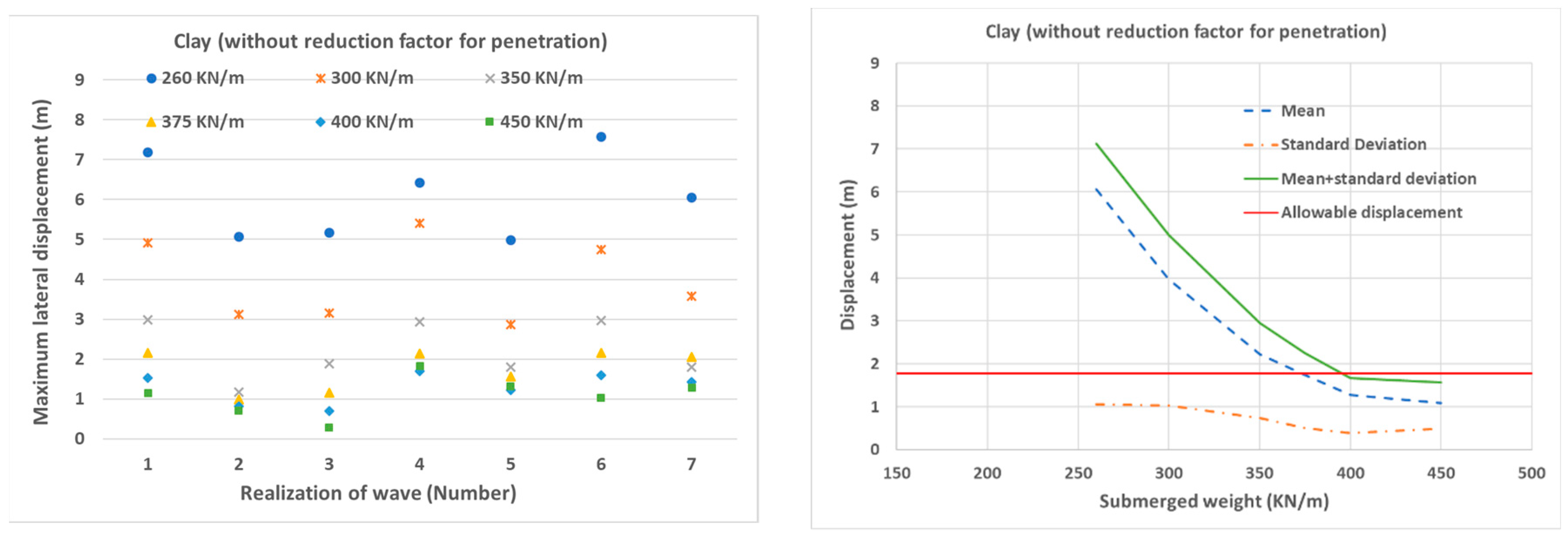
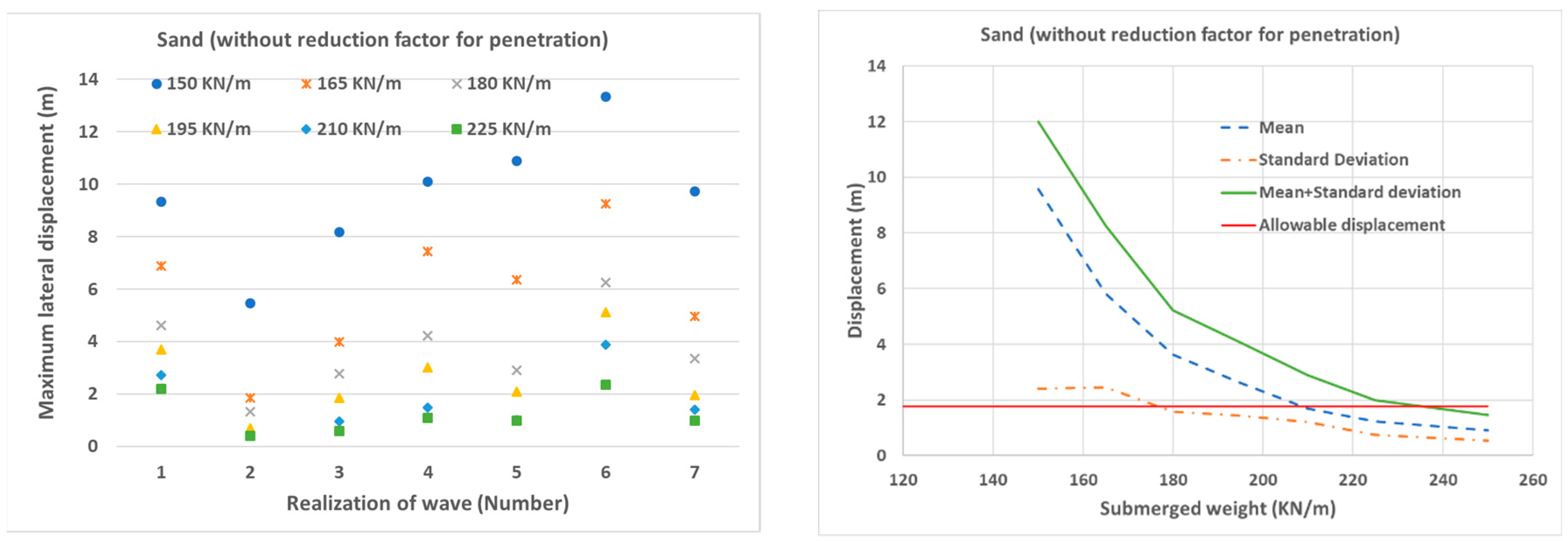
The design value is a very important parameter for the on-bottom stability analysis. A series of statistical analyses were performed during the establishment of the DNV RP F109. In DNV RP F109 the recommended design value is set to be the mean value plus one standard deviation of seven absolute maximum values from seven realizations. The statistical analyses are not performed for different set of seeds in the present paper, and the recommended value from DNV RP F109 is used to define the design value. Hence, seven analyses with random seeds are performed for each case. When the standard deviation in the resulting displacement has stabilized, the mean value plus the standard deviation is used as the design value.
3.1. Input Data
The datasheet of an umbilical is presented in
Table 2, and the complex cross section of the umbilical is simplified to a cylinder with equivalent properties, also listed in
Table 2. The equivalent thickness is calculated by obtaining approximately the same bending stiffness for the cylinder. The outer diameter remains the same and is the most important parameter in the calculation of hydrodynamic force and relative penetration during the lateral movement of the umbilical.
The environment data used in simulation are presented in
Table 3. In this study, the load combination of 10-year current and 100-year waves is applied in the simulation.
As the current velocity
is given at 1 m above the seabed, the mean perpendicular current velocity
over the cylinder diameter is determined according to [
17]:
where
is the reference measurement height over seabed (
= 1 m);
is the bottom roughness parameter.
In the present study, dynamic on-bottom stability of the umbilical is investigated for three different types of soil, and the mean perpendicular current
over the cylinder diameter for clay, sand and rock seabed is presented in
Table 4.
3.2. Analysis Matrix
The summary of the analysis for the three types of soil (clay, sand and rock) is presented in
Table 5,
Table 6 and
Table 7. For clay, there are 25 cases named from C1 to C25, and for sand, a total 26 cases named from S1 to S26 are studied. Cases C4 and S4 are the base cases for the clay and the sand soil. The required submerged weight for these three types of soil, namely clay, sand and rock, is first investigated through the analysis of cases C1–C6, S1–S6 and R1–R6. Then the following parameter studies are performed:
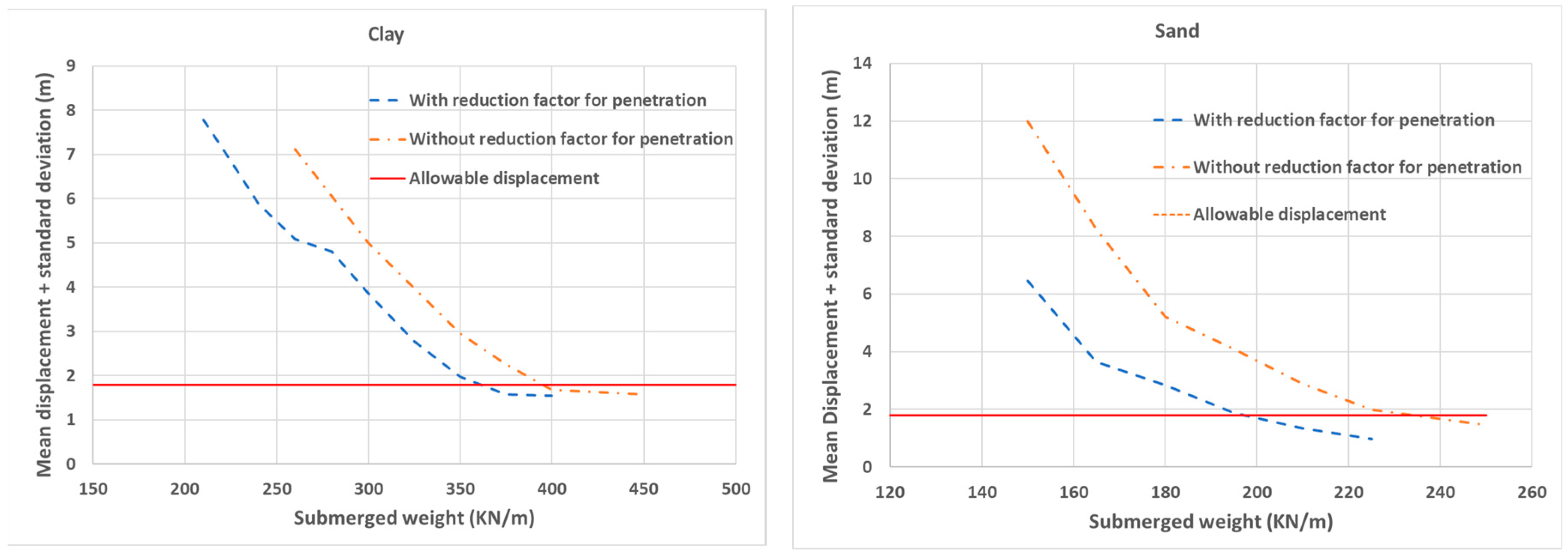
(i) Reduction factors due to penetration for clay and sand soils
The force reduction due to penetration is not normally considered in the engineering design process, but it is perhaps important to include this effect for umbilicals and cables. Dynamic on-bottom analysis has the advantage of including the reduction factor due to penetration directly. The reduction factors
and
for horizontal and vertical loads due to penetration is given as [
17]:
Cases C7–C12 and S7–S12 have the same input as C1–C6 and S1–S6, except that the reduction factor is not taken into account for C7–C12 and S7–S12. The effect of the reduction factor due to the penetration is investigated by comparing the analysis results between them.
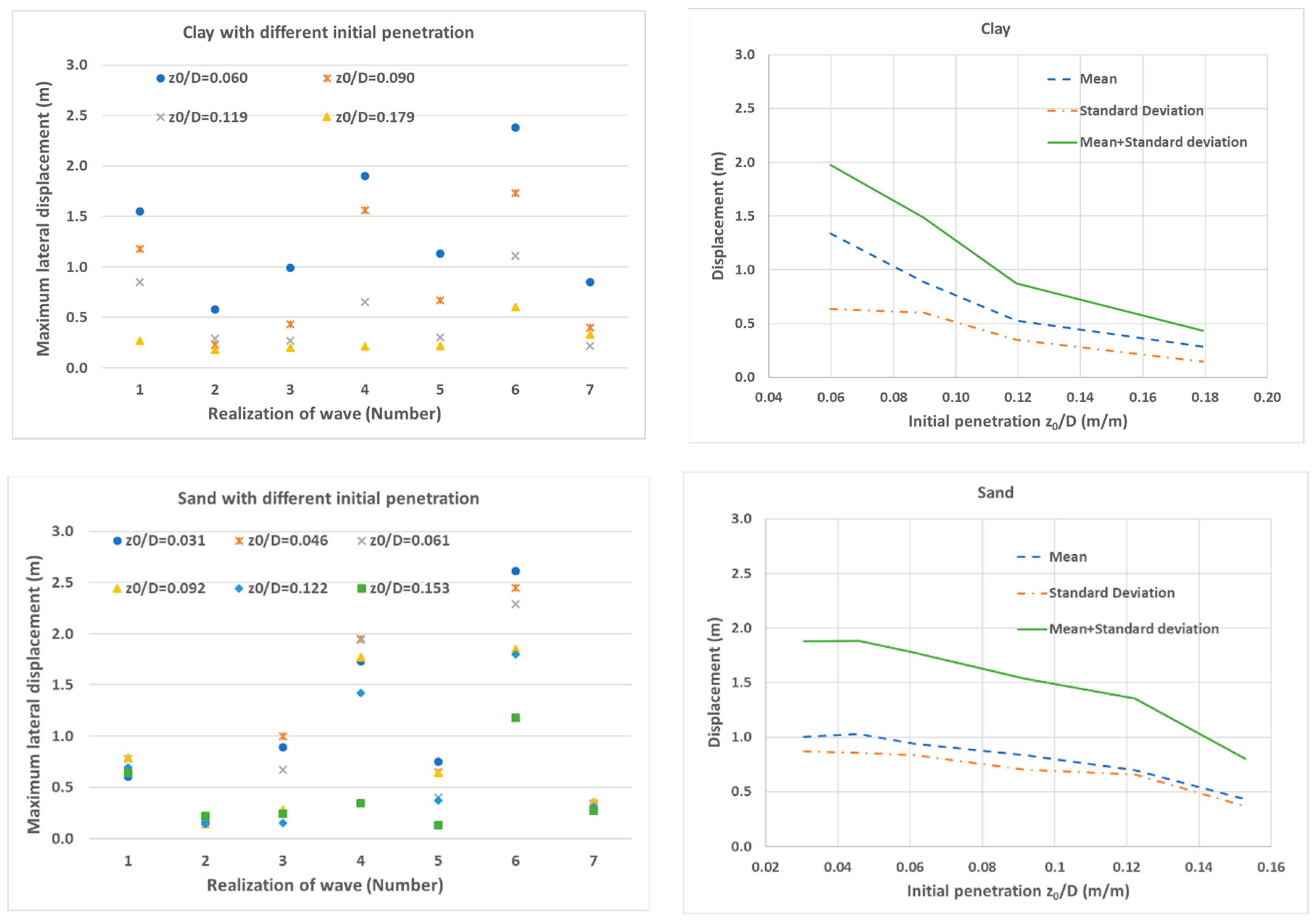
(ii) Initial penetration for clay and sand soils
The initial penetration defines the initial condition for the umbilicals and the cables, and PILS JIP [
16] stated that the prediction of the initial penetration needs to be further improved. In this study, the initial penetration is gradually increased for C13 to C15, and S13 to S17. The maximum initial penetration for the clay soil is 2 times of the base C4 and the maximum initial penetration for the sand soil is 3 times of the base S4. The effect of initial penetration on the maximum lateral displacement is investigated.
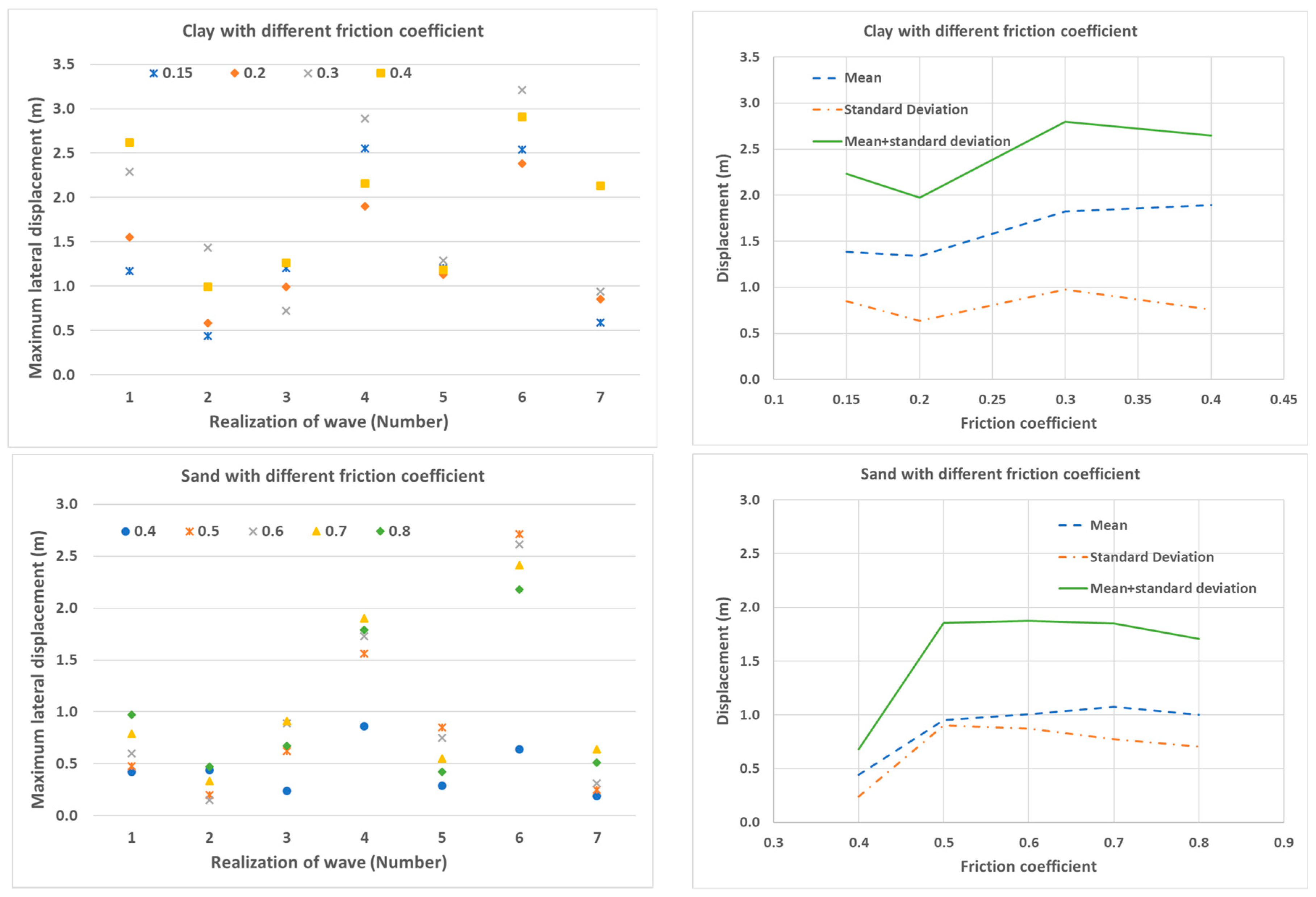
(iii) Friction coefficient of clay and sand soil
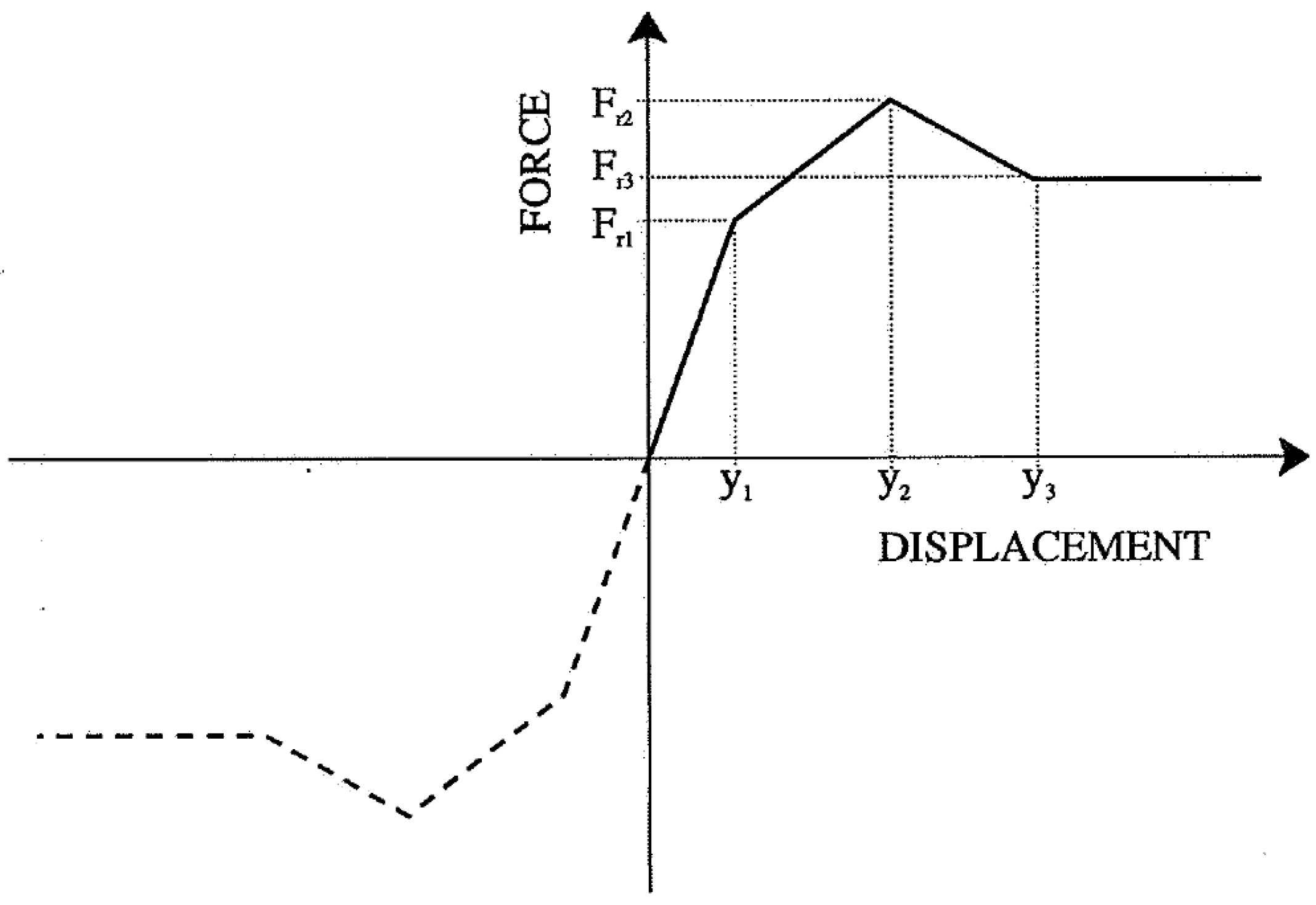
In engineering practice, when only the Coulomb friction model is considered, the conclusion is that the higher friction coefficient is, then the more stable the cylinder is.
When considering the energy-based soil model, the penetration is related to the accumulated displacement of the cylinder. The smaller the friction coefficient is, the earlier the cylinder starts to move. Moreover, both the accumulated displacement and the development of the penetration become larger as the friction coefficient decreases. The combined effect from the friction force and the passive resistance force means that the development of lateral displacement varies for different friction coefficients and does not have a certain trend corresponding to different friction coefficients [
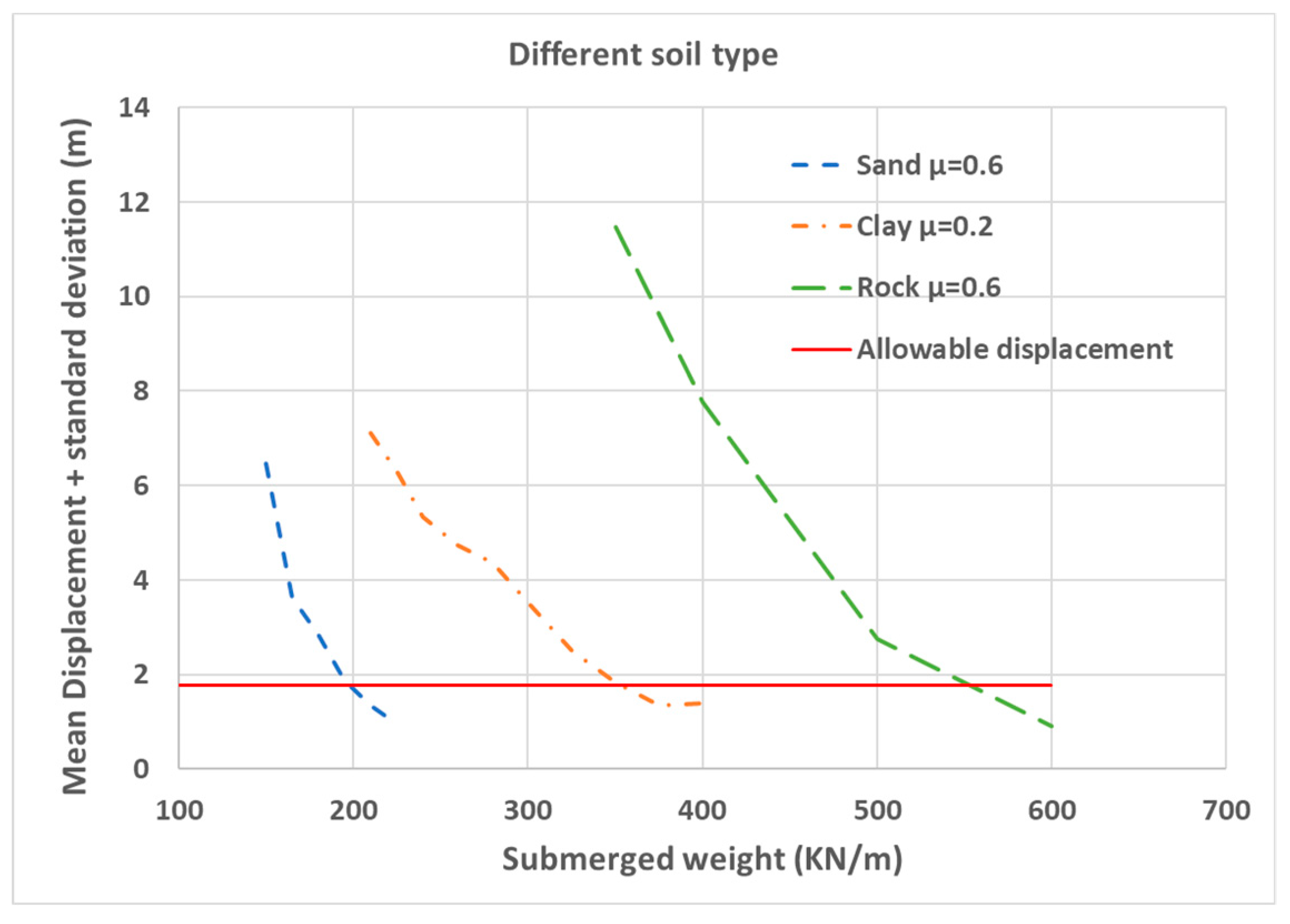
5]. In DNV-RP-F109 [
17], the friction coefficient of sand and clay is set to be 0.6 and 0.2, respectively. In the present study, the effect of the friction coefficient is further investigated for the clay, with the friction coefficient range of 0.15–0.4 (case C16–C18), and for the sand, with friction coefficient range of 0.4–0.8 (case S18–S21).
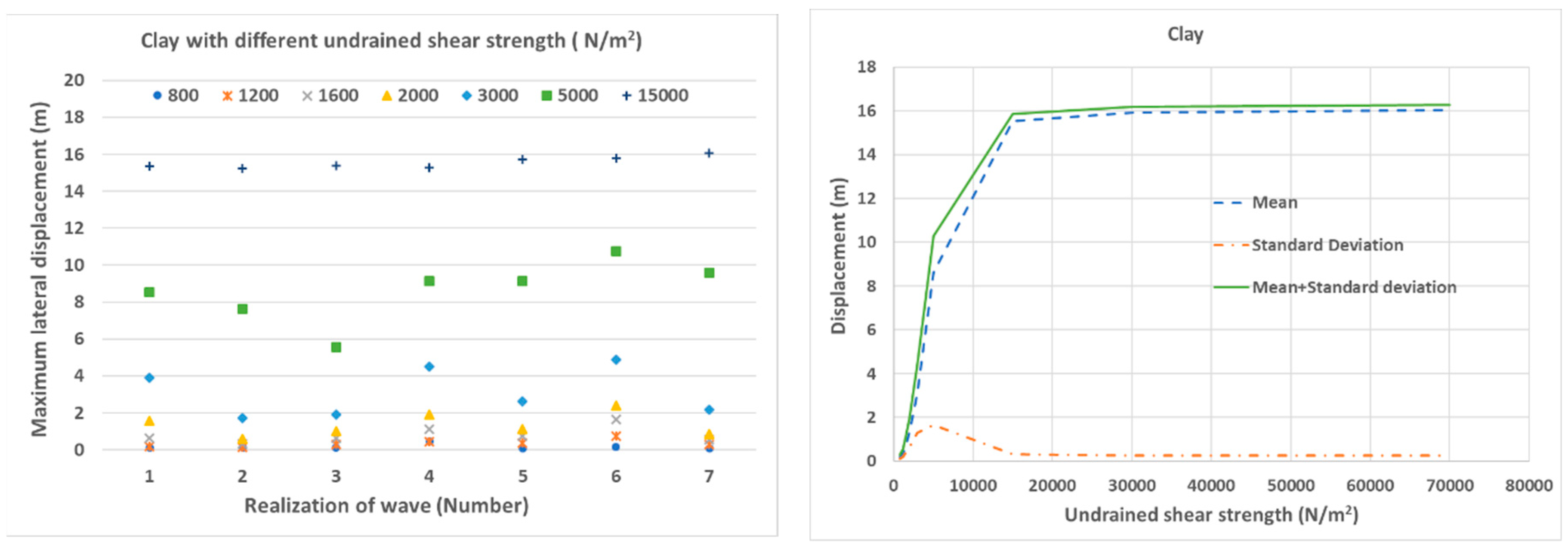
(iv) Undrained shear strength of clay
The undrained shear strength of clay represents the hardness of the soil, i.e., the lower the value, the softer the clay. The effect of undrained shear strength of clay is investigated for a range of 800 (soft clay) to 70,000 N/m2 (hard clay).
(v) Submerged unit weight of sand
The submerged weight of sand represents the compactness of sand, i.e., the lower the value, the looser the sand. The effect of the submerged unit weight of sand is investigated for the range of 6500 to 10,000 KN/m3 which corresponds to the loose and compact sand, respectively.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}