Numerical Analysis of the Effect of Offshore Turbulent Wind Inflow on the Response of a Spar Wind Turbine



Abstract
:1. Introduction
2. Theory and Methods
2.1. Atmospheric Stability and Wind Models
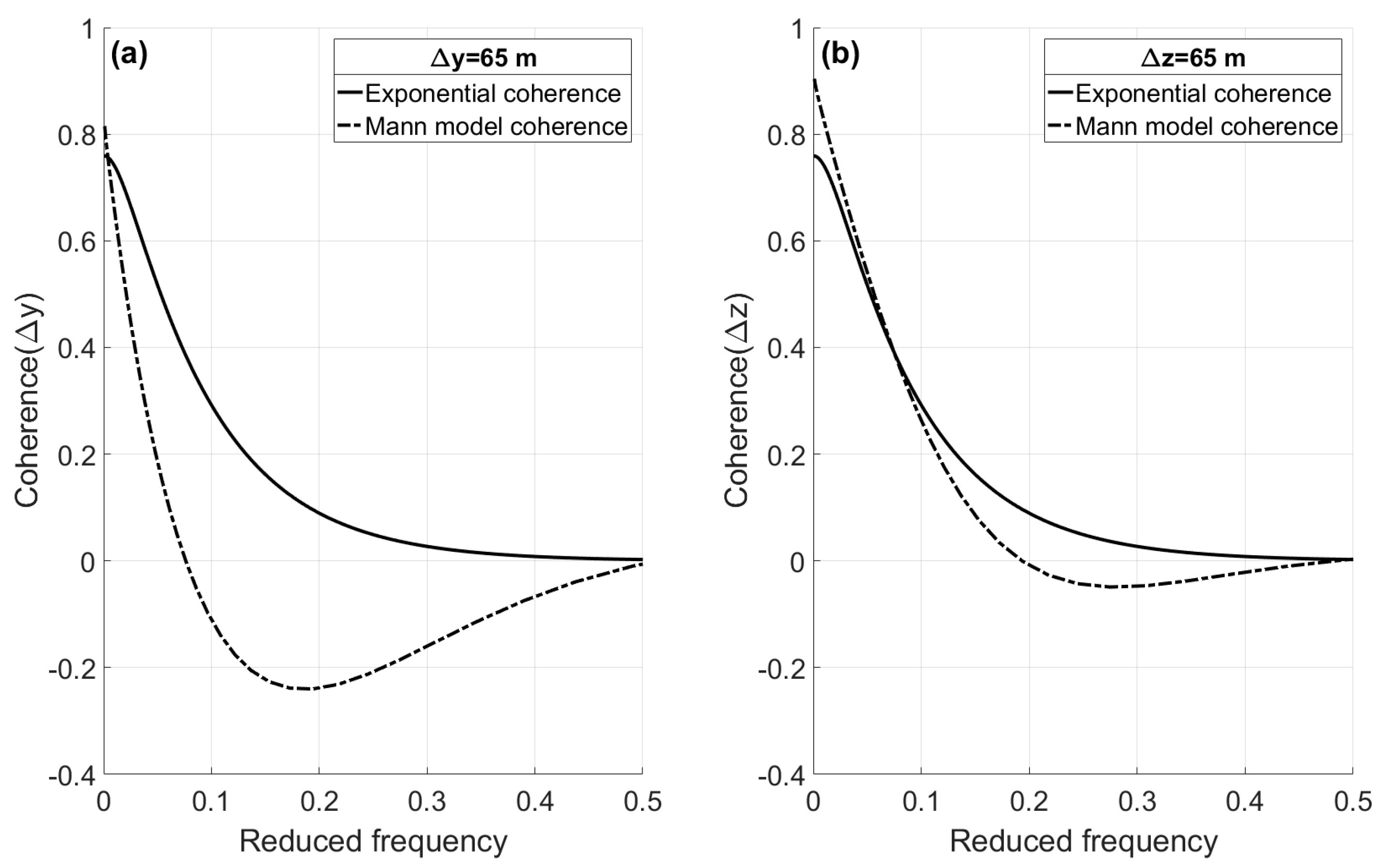
2.1.1. Kaimal Spectra and Exponential Coherence
- f: frequency (Hz),
- i: velocity component index (1: longitudinal, 2: lateral, and 3: vertical),
- Si: velocity spectrum for each component i,
- σi: standard deviation of velocity component i (m/s) (Table 1),
- Li: integral length scale of velocity component i (m) (Table 1),
- Uhub: mean wind speed at hub height (m/s).
- Δ: separation distance, either lateral or vertical (m),
- Lu: 8.1 Λ1 (m).
2.1.2. Mann Spectral Tensor
- i,j: index for different wind component (1: longitudinal, 2: lateral, and 3: vertical),
- Φij: anisotropic tensor for each component ij,
- k: non-dimensional wave number for each component direction (k1, k2, k3),
- k: non-dimensional wave number magnitude = (k12 + k22 + k32)1/2,
- E(k): non-dimensional von Karman isotropic energy spectrum = 1.453k4/(1 + k2)17/8 [1],
- δij: non-dimensional spatial separation vector components.
- Ψij: wave number autospectrum (i = j)/cross-spectrum (i ≠ j),
- σi2: component variance (m2/s2) (Table 1),
- σiso: 0.55 σ1,
- ℓ: 0.8 Λ1, where Λ1 = 42 m for z ≥ 60 m,
- Δy = separation distance in the lateral direction,
- Δz = separation distance in the vertical direction.
2.1.3. Pointed-Blunt
- a1i, a2i, b1i, b2i: floating parameters,
- i: index for different wind component (u: longitudinal, v: lateral, and w: vertical),
- u*: friction velocity (m/s), computed using [20]:
- U(z): mean wind speed at height z (m/s),
- κ: von Karman constant (0.4),
- zo: surface roughness (m), taken as 0.0001 m for open sea surface [17],
- Ψ: 2ln(1 + x) + ln(1 + x2) − 2tan−1(x); x = (1 − 19.3ζ)1/4.
2.2. Methodology
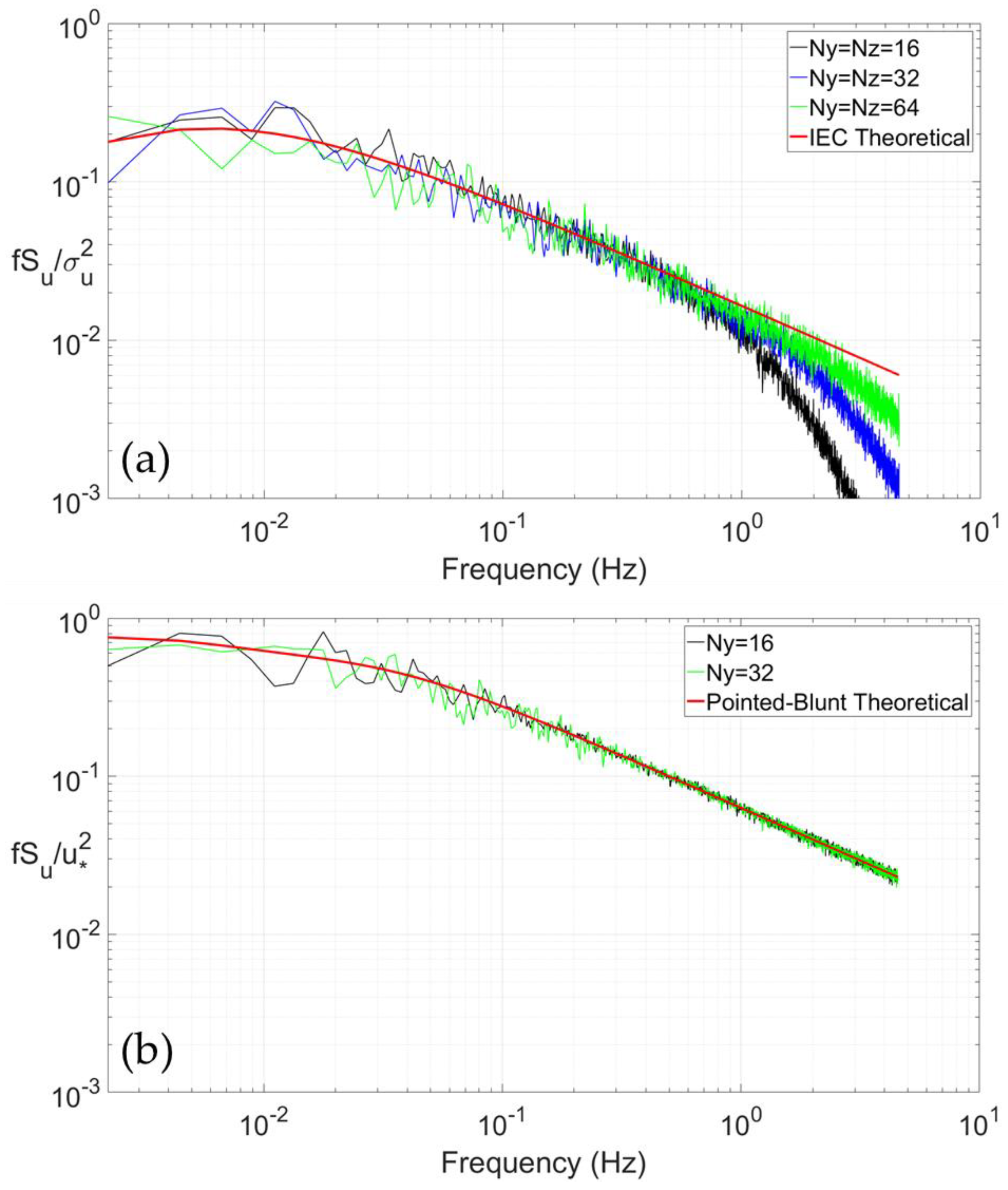
2.2.1. A Note on the Turbulence Box’s Grid Resolution
3. Results
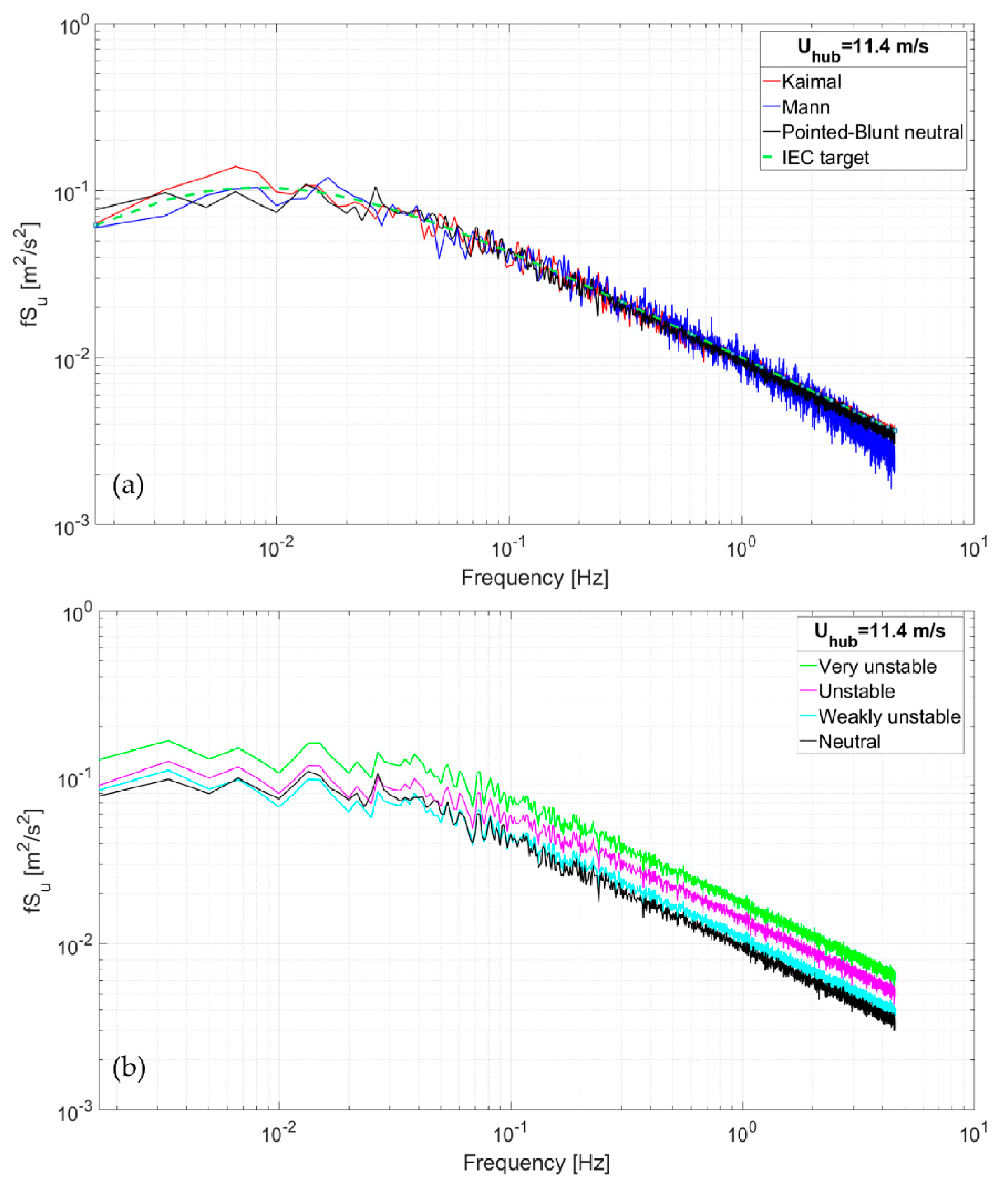
3.1. Simulated Wind Turbulence
3.2. Natural Frequencies
3.3. Load and Motion Responses
- DEL: damage equivalent load,
- Ni: total number of cycles causing failure in bin i from rain flow counting,
- Si: load magnitude causing failure in bin i from rain flow counting,
- neq: equivalent number of cycles,
- m: Wöhler exponent (taken as 3 for steel material and 12 for fiberglass).
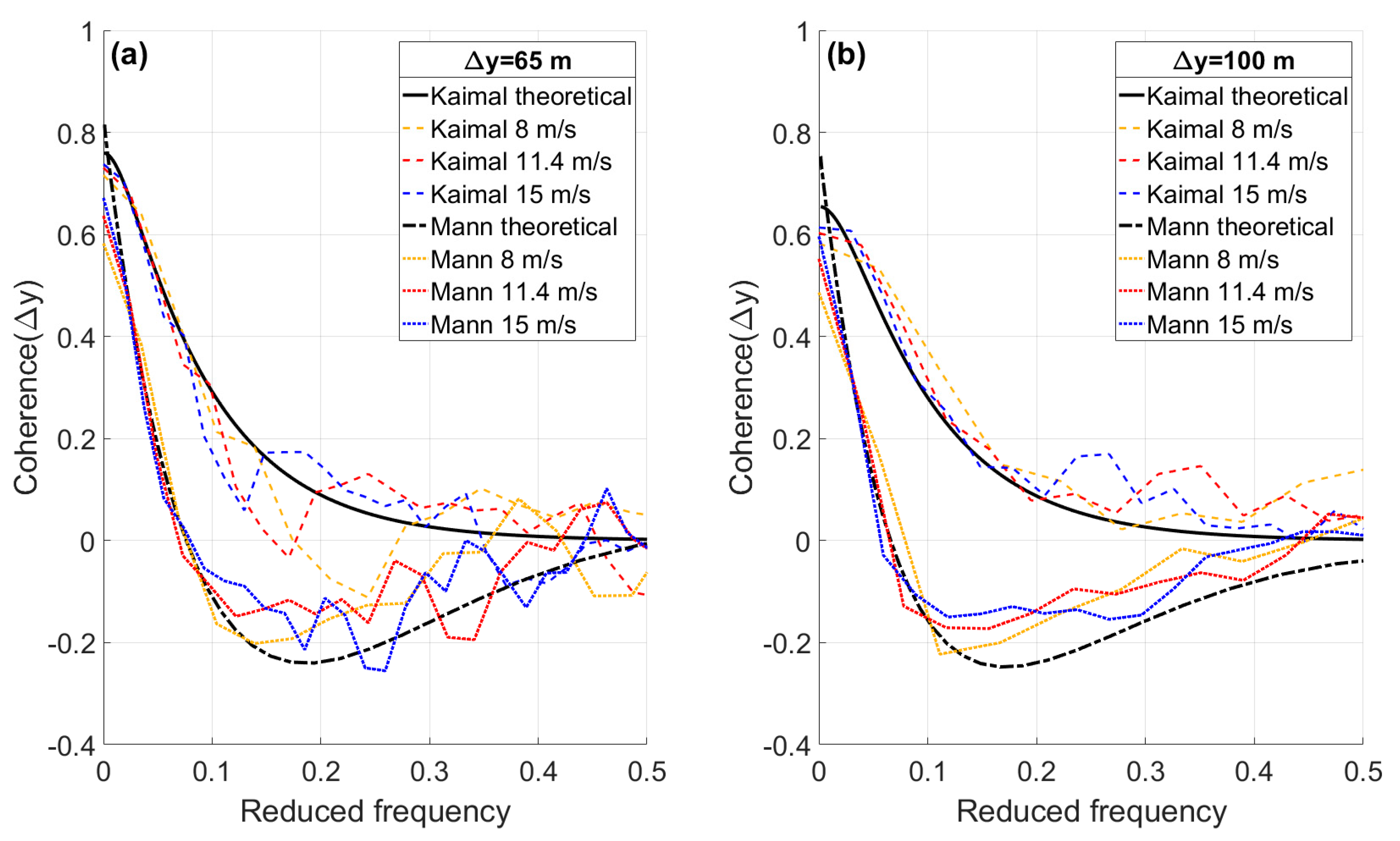
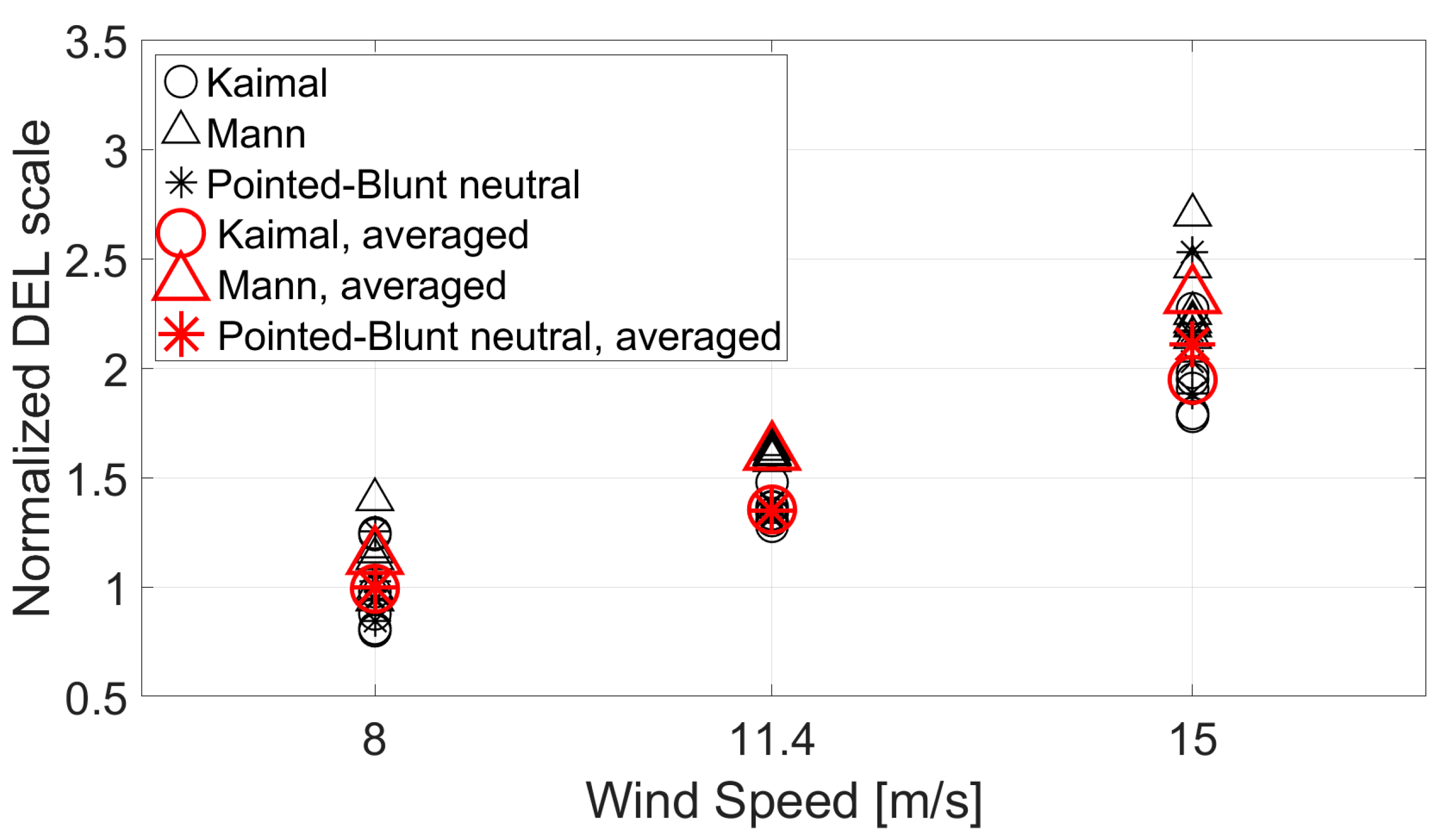
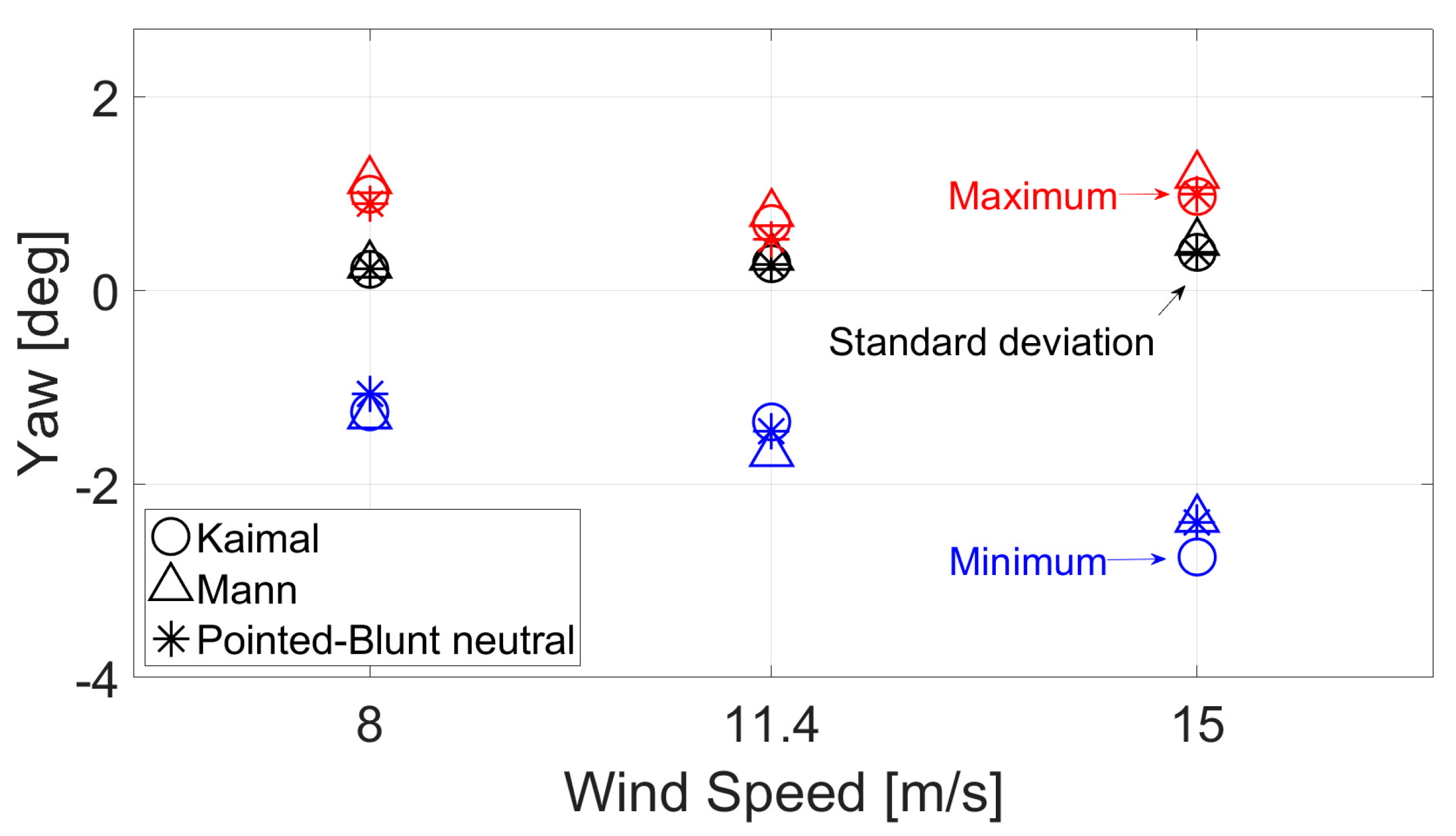
3.3.1. Influence of Coherences under Neutral Atmospheric Stability Conditions
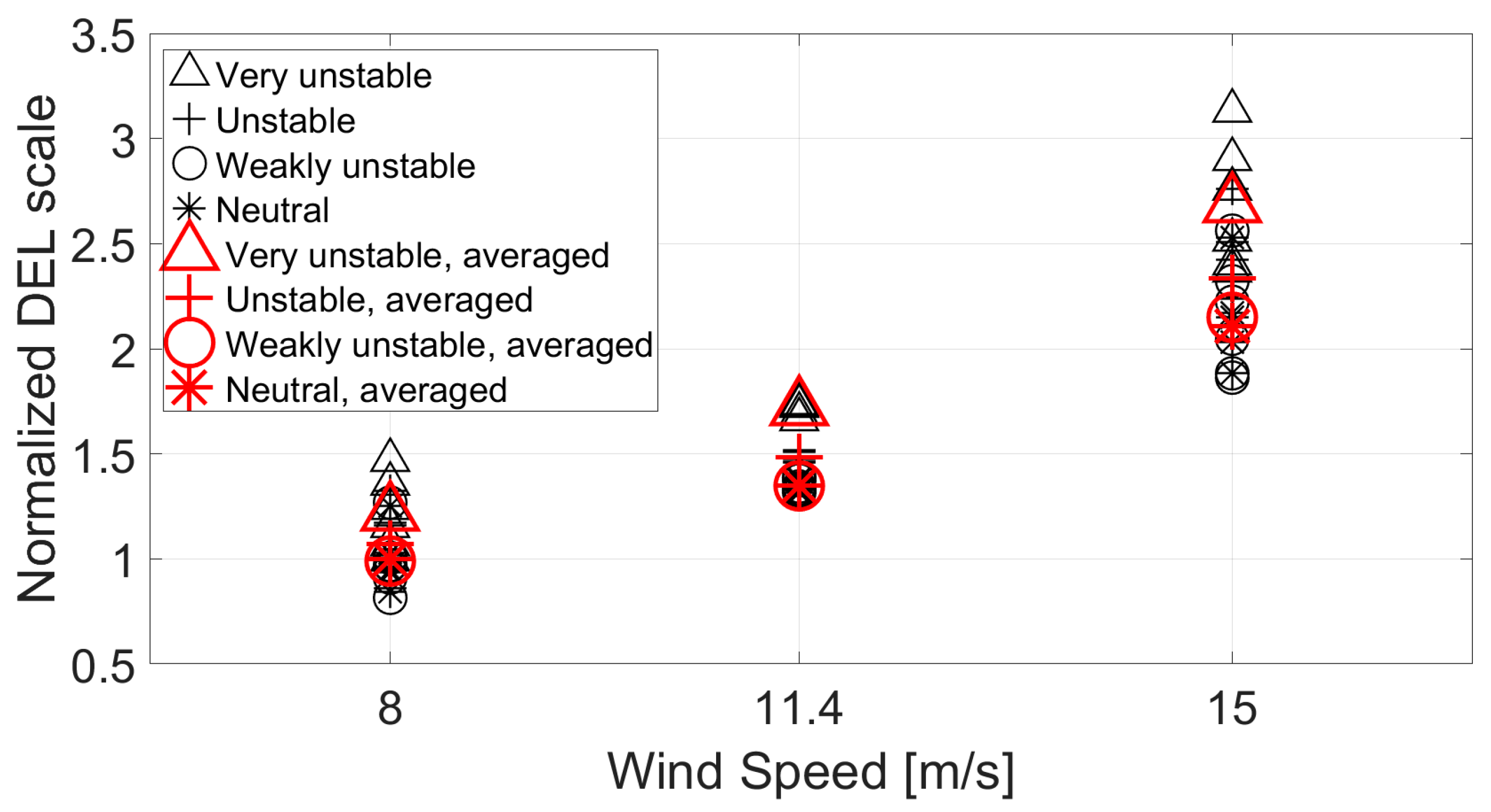
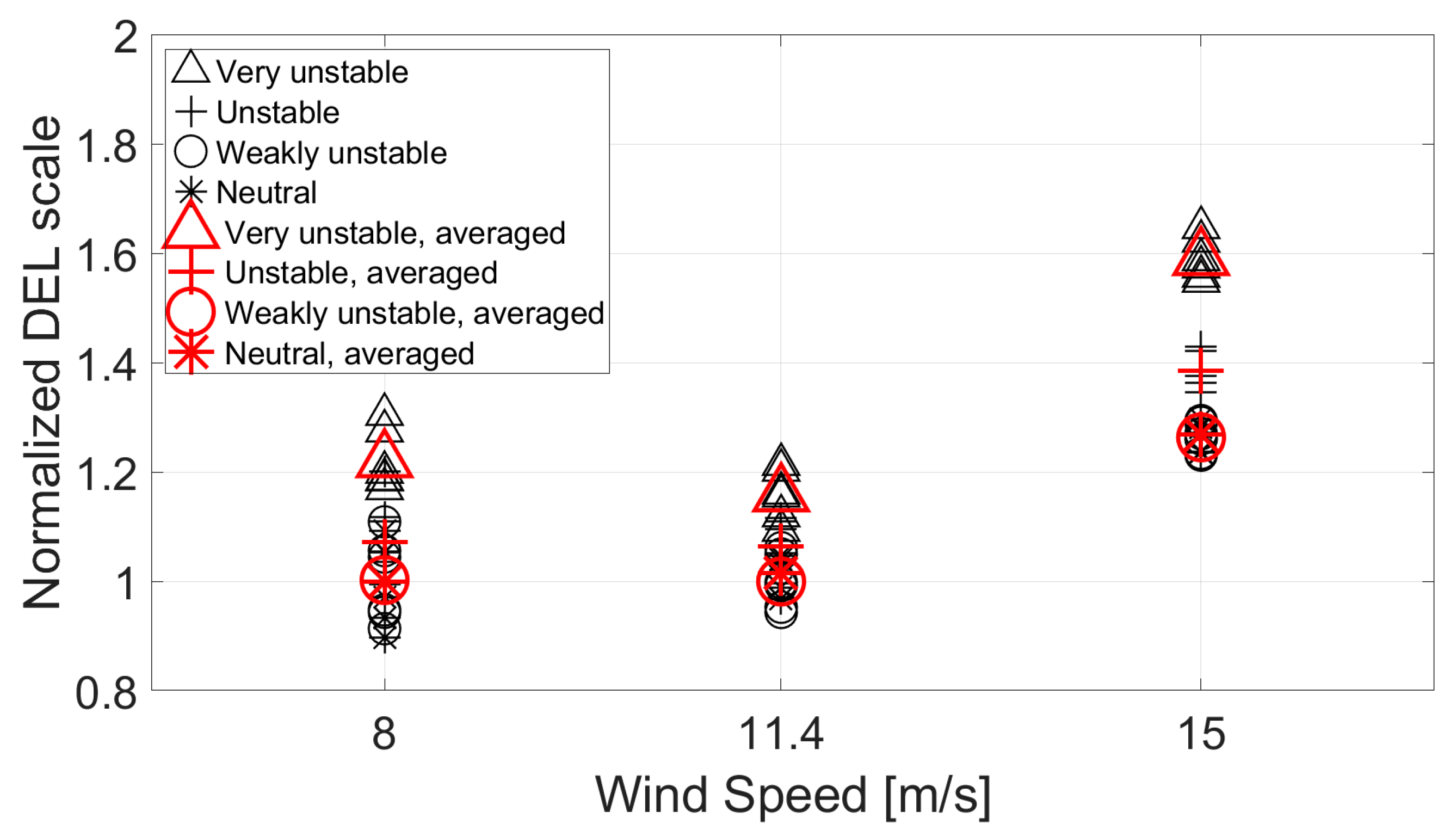
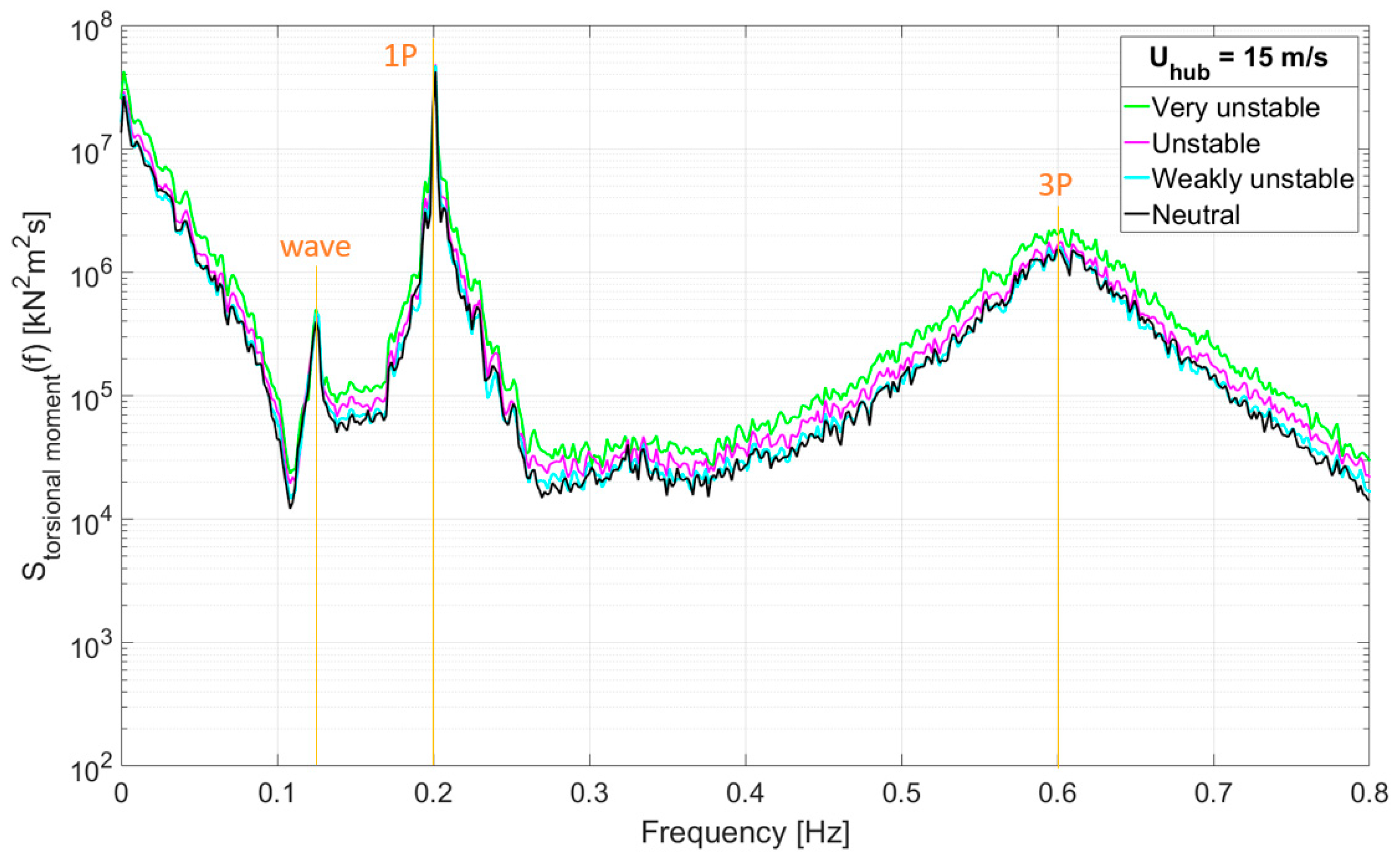
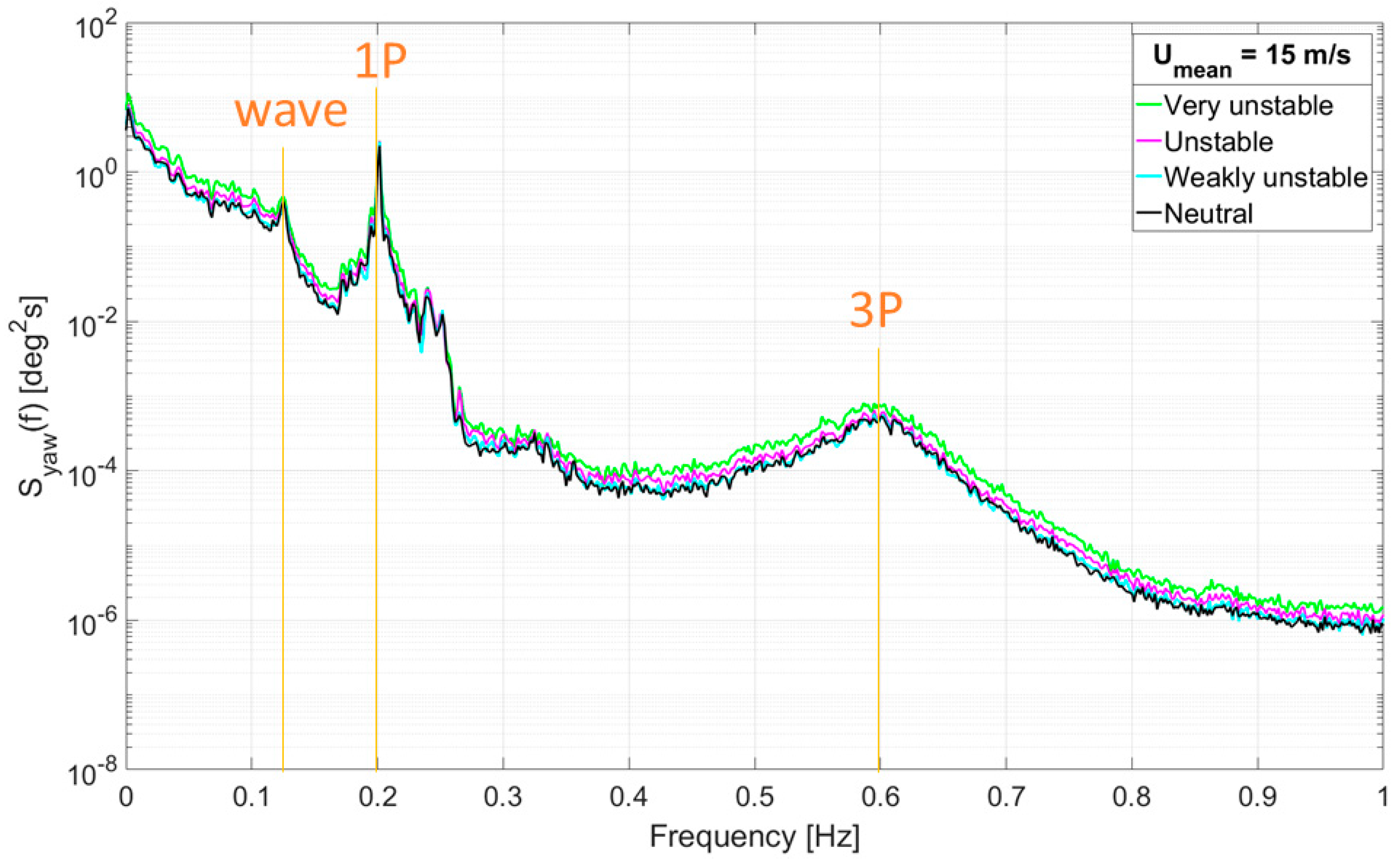
3.3.2. Influence of Variation in the Atmospheric Stability Conditions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IEC. Wind Turbines–Part 1: Design Requirements; IEC: Geneve, Switzerland, 2005. [Google Scholar]
- Kaimal, J.C.; Wyngaard, J.C.; Izumi, Y.; Coté, O.R. Spectral Characteristics of Surface-layer Turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- Mann, J. The spatial structure of neutral atmospheric surface-layer turbulence. J. Fluid Mech. 1994, 273, 141–168. [Google Scholar] [CrossRef]
- Eliassen, L.O.; Obhrai, C. Coherence of Turbulence Wind under Neutral Wind Condition at FINO1. Energy Procedia 2016, 94, 388–398. [Google Scholar] [CrossRef] [Green Version]
- FINO1–Research Platform in the North and Baltic Seas No. 1. Available online: https://www.fino1.de/en/ (accessed on 27 December 2019).
- Godvik, M. Influence of Wind Coherence on the Response of a Floating Wind Turbine. In Proceedings of the NORCOWE Science Meets Industry, Stavanger, Norway, 6 April 2016. [Google Scholar]
- Bachynski, E.E.; Eliassen, L. The Effects of Coherent Structures on the Global Response of Floating Offshore Wind Turbines. Wind Energy 2019, 22, 219–238. [Google Scholar] [CrossRef]
- Doubrawa, P.; Churchfield, M.J.; Godvik, M.; Sirnivas, S. Load Response of a Floating Wind Turbine to Turbulent Atmospheric Flow. Appl. Energy 2019, 242, 1588–1599. [Google Scholar] [CrossRef]
- Sathe, A.; Mann, J.; Barlas, T.; Bierbooms, W.A.; Van Bussel, G.J. Influence of Atmospheric Stability on Wind Turbine Loads. Wind Energy 2013, 16, 1013–1032. [Google Scholar] [CrossRef]
- Krogsæter, O.; Reuder, J. Validation of Boundary Layer Parameterization Schemes in the Weather Research and Forecasting (WRF) Model under the Aspect of Offshore Wind Energy Applications—Part II: Boundary Layer Height and Atmospheric Stability. Wind Energy 2014, 18, 1291–1302. [Google Scholar] [CrossRef] [Green Version]
- Energy, D.W. DTU Vindenergi: Testcenter Høvsøre. Available online: https://www.vindenergi.dtu.dk/test-centers/hoevsoere_dk(accessed on 7 June 2019).
- Cheynet, E.J.; Jakobsen, J.B.; Reuder, J. Velocity Spectra and Coherence Estimates in the Marine Atmospheric Boundary Layer. Bound. Layer Meteorol. 2018, 169, 429–460. [Google Scholar] [CrossRef]
- Højstrup, J. A Simple Model for the Adjustment of Velocity Spectra in Unstable Conditions Downstream of an Abrupt Change in Roughness and Heat Flux. Bound. Layer Meteorol. 1981, 21, 341–356. [Google Scholar] [CrossRef]
- Putri, R.M.; Obhrai, C.; Knight, J.M. Offshore Wind Turbine Loads and Motions in Unstable Atmospheric Conditions. J. Phys. Conf. Ser. 2019, 1356. [Google Scholar] [CrossRef]
- Knight, J.M.; Obhrai, C. The Influence of an Unstable Turbulent Wind Spectrum on the Lodas and Motions on Floating Offshore Wind Turbines. IOP Conf. Ser. Mater. Sci. Eng. 2019, 700. [Google Scholar] [CrossRef]
- Saranyasoontorn, K.; Manuel, L.; Veers, P.S. A Comparison of Standard Coherence Models for Inflow Turbulence with Estimates from Field Measurement. J. Sol. Energy Eng. 2004, 126, 1069–1082. [Google Scholar] [CrossRef]
- Dyrbye, C.; Hansen, S.O. Wind Loads on Structures; John Wiley & Sons Ltd.: West Sussex, UK, 1997. [Google Scholar]
- IEC. Wind Energy Generation Systems–Part 1: Design Requirements; IEC: Geneve, Switzerland, 2019. [Google Scholar]
- Jonkman, J. TurbSim User’s Guide: Version 2.00.00; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2016.
- Veritas, D.N. Environmental Conditions and Environmental Loads; Det Norske Veritas: Høvik, Norway, 2010; Volume DNV-RP-C205. [Google Scholar]
- Jonkman, J.; Musial, W. Offshore Code Comparison Collaboration (OC3) for IEA Task 23 Offshore Wind Technology and Deployment; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010.
- Ocean, S. SIMA. Available online: https://www.sintef.no/en/software/sima/ (accessed on 28 September 2019).
- DNVGL. DNVGL-CG-0130; Wave Loads; DNVGL AS: Høvik, Norway, 2018. [Google Scholar]
- Larsen, T.J.; Hansen, A.M. How 2 HAWC2, the User’s Manual; Department of Wind Energy: Roskilde, Denmark, 2019.
- Cheynet, E. Wind Field Simulation. Available online: https://se.mathworks.com/matlabcentral/fileexchange/50041-wind-field-simulation-the-user-friendly-version (accessed on 19 October 2018).
- Kim, Y.L.; Lutz, T.; Jost, E.; Gomez-Iradi, S.; Muñoz, A.; Méndez, B.; Lampropoulos, N.; Stefanatos, N.; Sørensen, N.N.; Madsen, H.; et al. AVATAR Deliverable D2.5: Effects of Inflow Turbulence on Large Wind Turbines; D2.5; ECN Wind Energy: Petten, The Netherland, 2016. [Google Scholar]
- Energy, D.W. HAWC2 Online Course. Available online: https://windenergy.itslearning.com/ContentArea/ContentArea.aspx?LocationID=29&LocationType=1 (accessed on 12 February 2016).
- Saccoman, M. Coupled Analysis of a Spar Floating Wind Turbine considering both Ice and Aerodynamic Loads. Master’s Thesis, Aalto University, Aalto, Finland, 2015. [Google Scholar]
- Ahn, H.-J.; Shin, H. Model test and numerical simulation of OC3 spar type floating offshorewind turbine. Int. J. Nav. Archit. Ocean Eng. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Jonkman, J. FAST: An Aeroelastic Computer-Aided Engineering (CAE) Tool for Horizontal Axis Wind Turbines. Available online: https://nwtc.nrel.gov/FAST (accessed on 2 December 2019).
- Tatsuo, E.; Koichi, M.; Kiyohumi, T.; Kakuichi, K.; Masanori, M. Damage evaluation of metals for random or varying loading—Three aspects of rain flow method. Mech. Behav. Mater. 1974, 1, 371–380. [Google Scholar]
- Sathe, A.; Bierbooms, W. Influence of Different Wind Profiles due to Varying Atmospheric Stability on the Fatigue Life of Wind Turbines. J. Phys. Conf. Ser. 2007, 75, 767–780. [Google Scholar] [CrossRef] [Green Version]
- Bachynski, E.E. Fixed and Floating Offshore Wind Turbine Support Structures. In Offshore Wind Energy Technology; John Wiley & Sons Ltd.: West Sussex, UK, 2018. [Google Scholar] [CrossRef]
- Putri, R.M. A Study of the Coherences of Turbulent Wind on a Floating Offshore Wind Turbine. Master’s Thesis, University of Stavanger, Stavanger, Norway, 2016. [Google Scholar]
- Flügge, M.; Heggelund, Y.; Reuder, J.; Godvik, M.; Nielsen, F.G.; Jakobsen, J.B.; Svardal, B.; Cheynet, E.; Obhrai, C. COTUR Measuring Coherence and Turbulence with LIDARs. In Proceedings of the EERA DeepWind, Trondheim, Norway, 16–18 January 2019. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Velocity Component | |||
|---|---|---|---|
| 1 (u) | 2 (v) | 3 (w) | |
| σi | σ1 | 0.8 σ1 | 0.5 σ1 |
| Li | 8.1 Λ1 | 2.7 Λ1 | 0.66 Λ1 |
| Properties | Value |
|---|---|
| Power production rating | 5 MW |
| Rotor diameter (hub diameter) | 126 m (3 m) |
| Hub height | 90 m |
| Cut-in, rated, cut-out wind speed | 3, 11.4, 25 m/s |
| Cut-in and rated rotor speed | 6.9, 12.1 rpm |
| Water depth, platform draft | 320 m, 120 m |
| Added mass, drag coefficient | 0.969954, 0.6 |
| Number of mooring lines (angle between adjacent lines), mooring line length | 3 (120°), 853.87 m |
| LC No. | Wind Model | Atmospheric Stability Conditions | Coherence Model | Input Parameters |
|---|---|---|---|---|
| 1a | Kaimal | Neutral | Equation (2) | Uhub * = 8 m/s (TI ** = 5.95%) Uhub = 11.4 m/s (TI = 6.08%) Uhub = 15 m/s (TI = 6.16%) |
| 1b | Mann | Equation (5) | ℓ = 42 m, γ = 3.9 Uhub = 8 m/s (TI = 5.95%), αε2/3 = 0.00956 Uhub = 11.4 m/s (TI = 6.08%), αε2/3 = 0.0203 Uhub = 15 m/s (TI = 6.16%), αε2/3 = 0.036 | |
| 2a | Pointed-Blunt | Neutral | Equation (2) | Lm = ∞ (ζ = 0) Lm = −200 m (ζ = −0.407) Lm = −100 m (ζ = −0.815) Lm = −50 m (ζ = −1.63) Uhub = 8, 11.4, 15 m/s |
| 2b | Weakly unstable | |||
| 2c | Unstable | |||
| 2d | Very unstable | |||
| No. | Grid Size dy * = dz ** (m) | No. of Grid Points in y and z Directions Ny = Nz (–) | Lx = 3600 s × Uhub = Nx × dx *** (m) | Wind Model |
|---|---|---|---|---|
| 1 | 10 (coarse) | 16 | 28,800 | Kaimal 1, Mann 2 |
| 2 | 5 (fine) | 32 | 41,040 | Kaimal 1, Mann 2 |
| 3 | 2.5 (very fine) | 64 | 54,000 | Kaimal 1, Mann 2 |
| Turbulence Intensity (%) | ||||||
|---|---|---|---|---|---|---|
| Uhub (m/s) | LC 1 | LC 2 | ||||
| Kaimal | Mann | Pointed Blunt | ||||
| (a) Neutral | (b) Neutral | (a) Neutral | (b) Weakly Unstable | (c) Unstable | (d) Very Unstable | |
| 8 | 5.77 ± 0.17 | 5.83 ± 0.4 | 5.95 ± 0.2 | 6.0 ± 0.23 | 6.51 ± 0.23 | 7.6 ± 0.27 |
| 11.4 | 5.93 ± 0.15 | 5.95 ± 0.4 | 6.08 ± 0.17 | 6.11 ± 0.2 | 6.61 ± 0.2 | 7.74 ± 0.25 |
| 15 | 6.03 ± 0.14 | 6.01 ± 0.35 | 6.16 ± 0.16 | 6.18 ± 0.2 | 6.67 ± 0.2 | 7.83 ± 0.23 |
| Mode | Natural Frequency (Hz) | OC3 Code Comparison [21] (in Hz) | Saccoman [28] (in Hz) |
|---|---|---|---|
| Surge | 0.00714 | 0.0085–0.0093 | 0.00776 |
| Sway | 0.0073 | 0.0085–0.0091 | 0.00776 |
| Roll | 0.045 | 0.51–0.55 | 0.0324 |
| Pitch | 0.033 | 0.054–0.057 | 0.0324 |
| Heave | 0.045 | 0.05–0.054 | 0.0305 |
| Yaw | 0.12 | 0.112–0.18 | 0.121 |
| First tower side–side | 0.492 | 0.67–0.7 | 0.448 |
| First tower fore–aft | 0.52 | 0.6–0.71 | 0.464 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Putri, R.M.; Obhrai, C.; Jakobsen, J.B.; Ong, M.C. Numerical Analysis of the Effect of Offshore Turbulent Wind Inflow on the Response of a Spar Wind Turbine. Energies 2020, 13, 2506. https://doi.org/10.3390/en13102506
Putri RM, Obhrai C, Jakobsen JB, Ong MC. Numerical Analysis of the Effect of Offshore Turbulent Wind Inflow on the Response of a Spar Wind Turbine. Energies. 2020; 13(10):2506. https://doi.org/10.3390/en13102506
Chicago/Turabian StylePutri, Rieska Mawarni, Charlotte Obhrai, Jasna Bogunovic Jakobsen, and Muk Chen Ong. 2020. "Numerical Analysis of the Effect of Offshore Turbulent Wind Inflow on the Response of a Spar Wind Turbine" Energies 13, no. 10: 2506. https://doi.org/10.3390/en13102506
APA StylePutri, R. M., Obhrai, C., Jakobsen, J. B., & Ong, M. C. (2020). Numerical Analysis of the Effect of Offshore Turbulent Wind Inflow on the Response of a Spar Wind Turbine. Energies, 13(10), 2506. https://doi.org/10.3390/en13102506