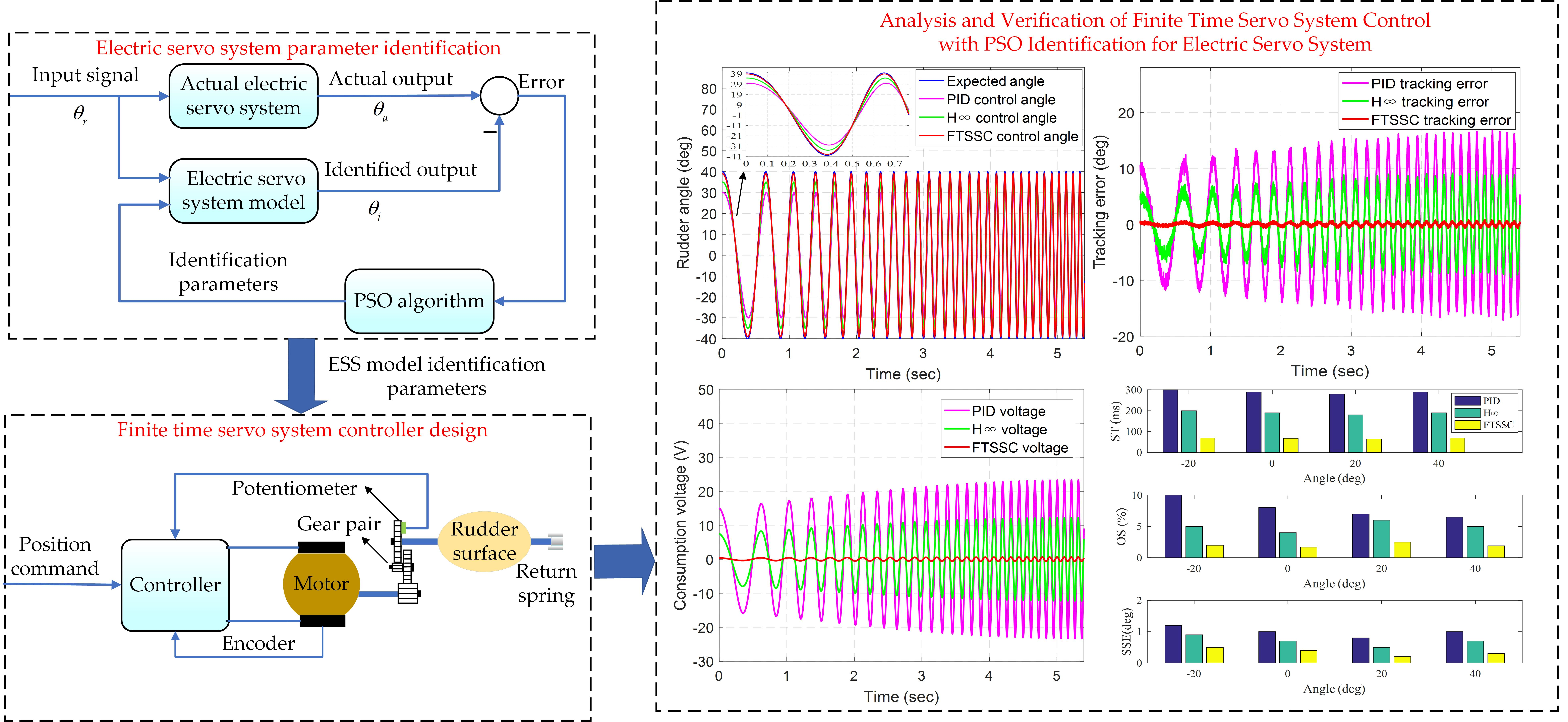
Analysis and Verification of Finite Time Servo System Control with PSO Identification for Electric Servo System

Abstract
:
1. Introduction
2. Model of Electric Servo System
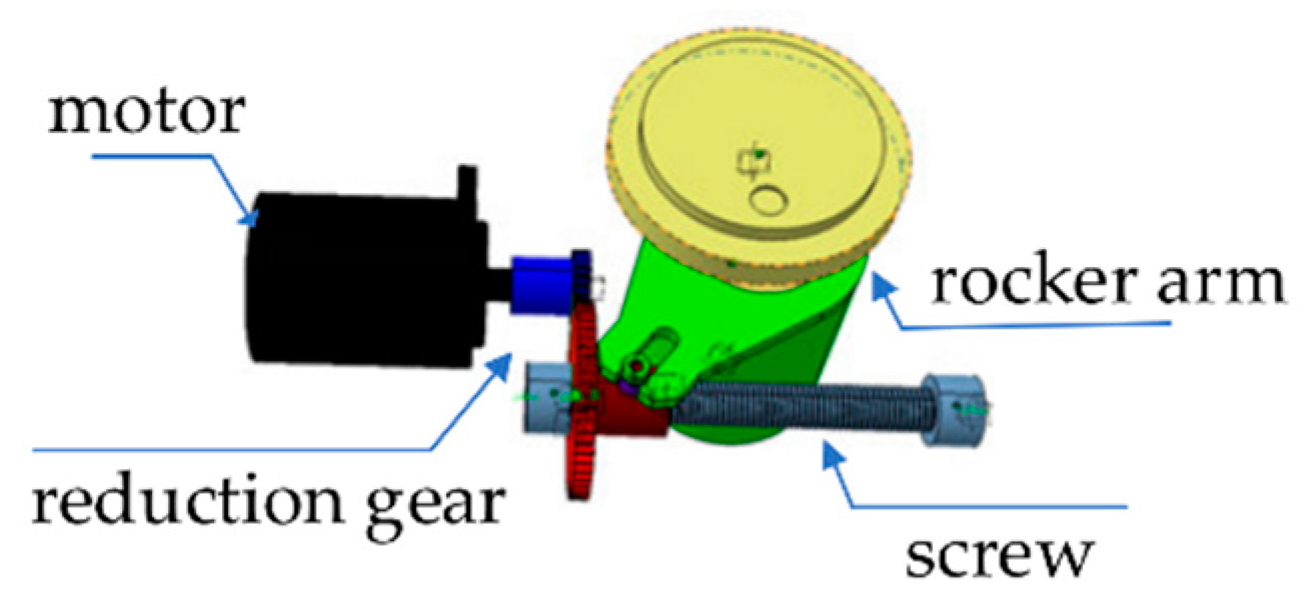
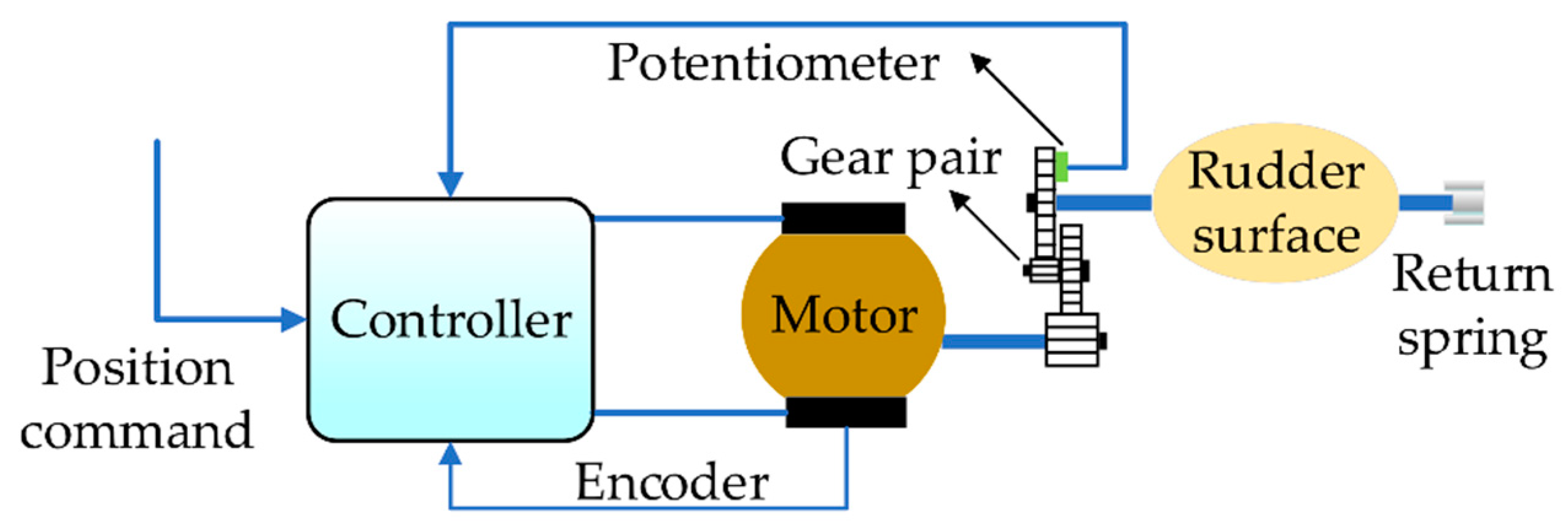
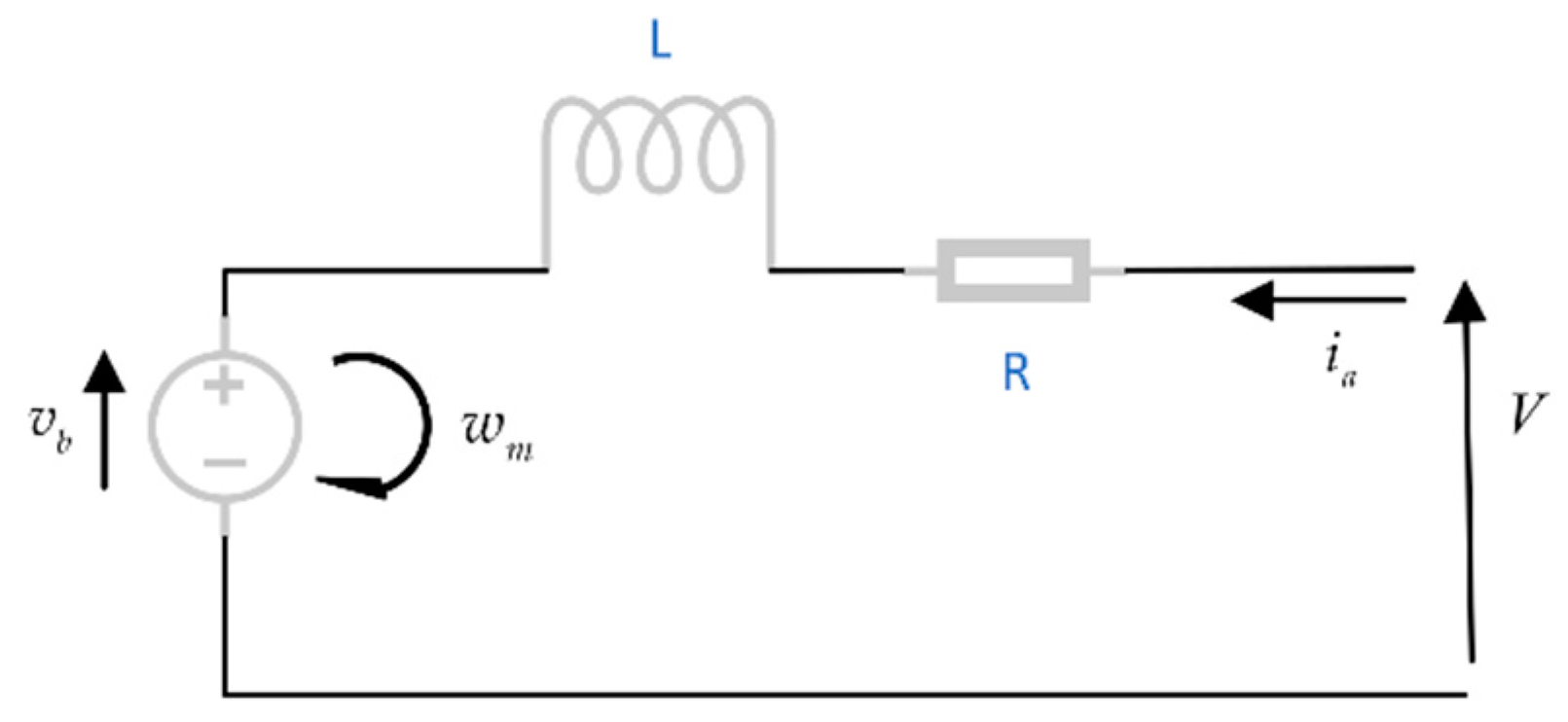
2.1. System Description
2.2. Fundamental Lemma
- (1)
- V(x) is a positive definite and continuous function on the domain U.
- (2)
- There exist real numbers c >0, and an open neighborhood containing the origin, so that the following conditions are true
3. Control Strategy Based on PSO Identification
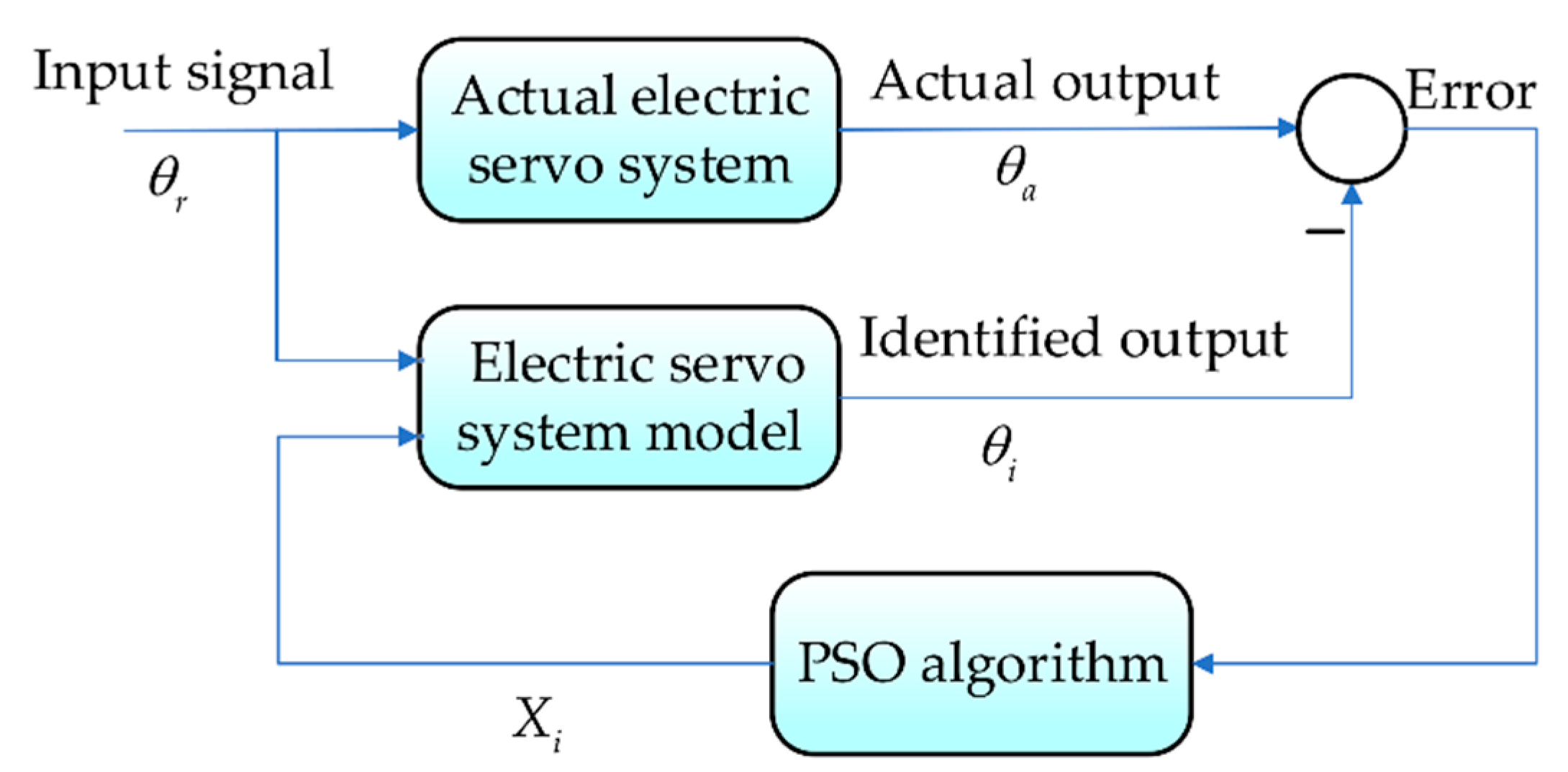
3.1. Parameter Identification Based on PSO
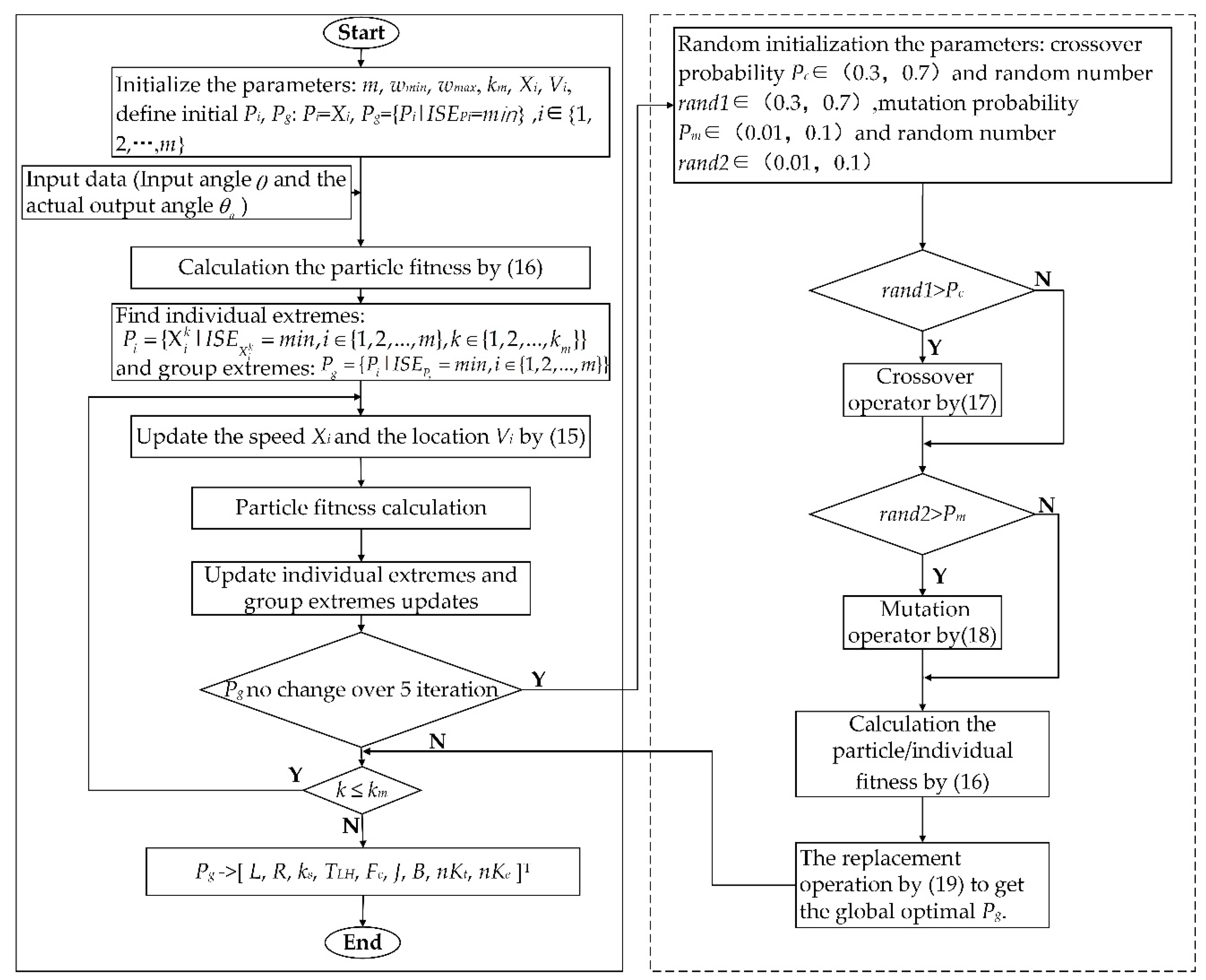
3.2. Improvements on PSO
3.2.1. Introducing GA into PSO
- (1)
- Crossover. It is assumed that the crossover probability is Pc in the entire population and the crossover operations are performed between individuals when the crossover probability is greater than the set value. The offspring and of randomly chosen parents and are:where rand and rand1 represent random numbers that obey the uniform distribution.
- (2)
- Mutation. Assume that the crossover probability Pm is greater than the set value. The offspring population is generated according to Equation (18):where rand2, r, and represent random numbers that obey the uniform distribution, the element .
- (3)
- Replacement. Calculate the individual fitness values of the offspring after the crossover and mutation, and the elite retention strategy according to Equation (19):
3.2.2. Improve Inertia Weight
3.3. Controller Based on Finite Time
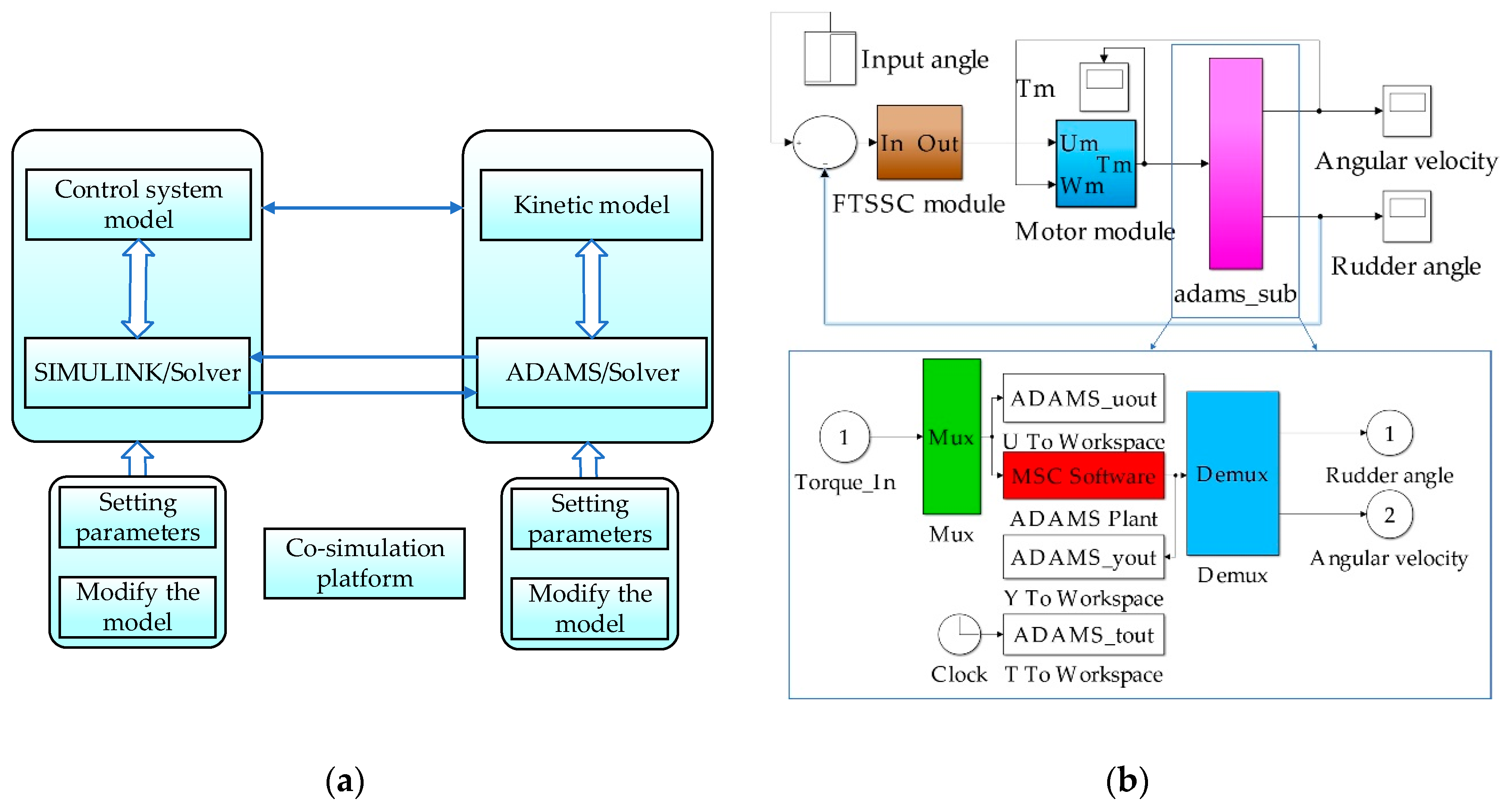
3.4. Co-Simulation
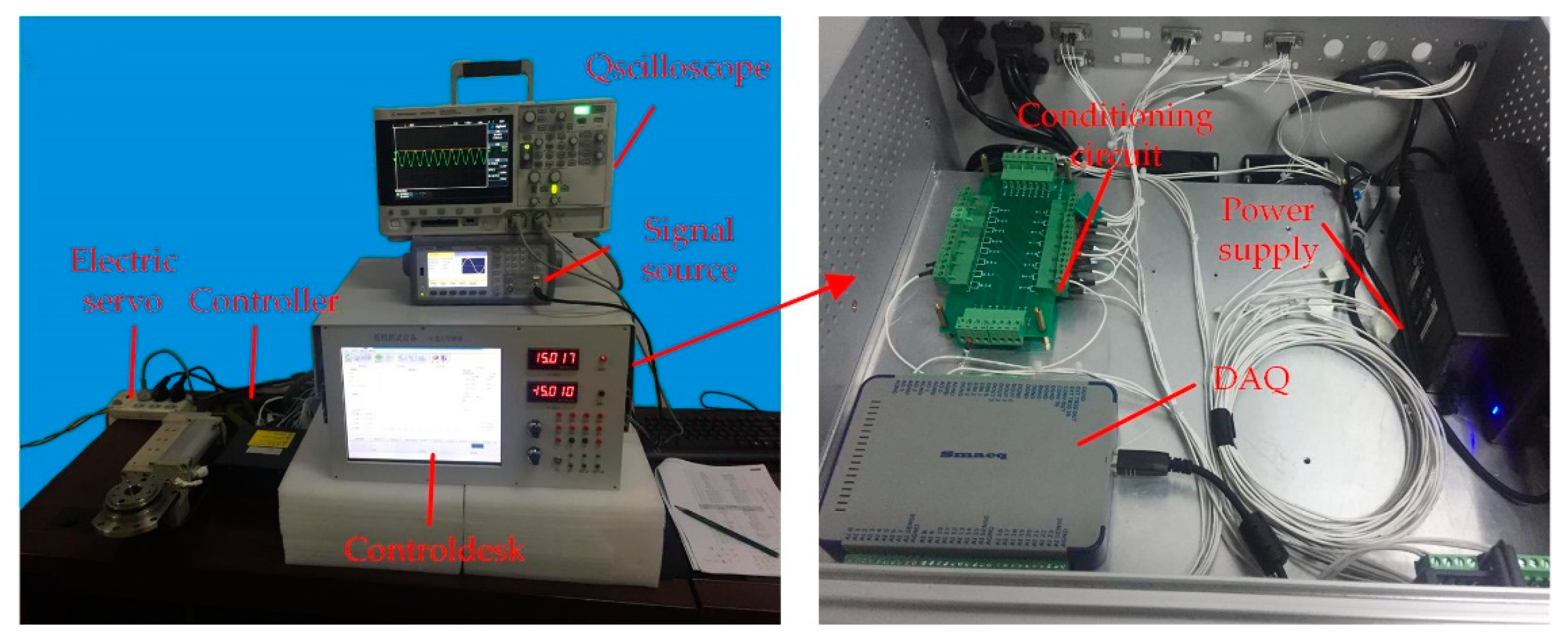
4. Experimental Application and Results Analysis
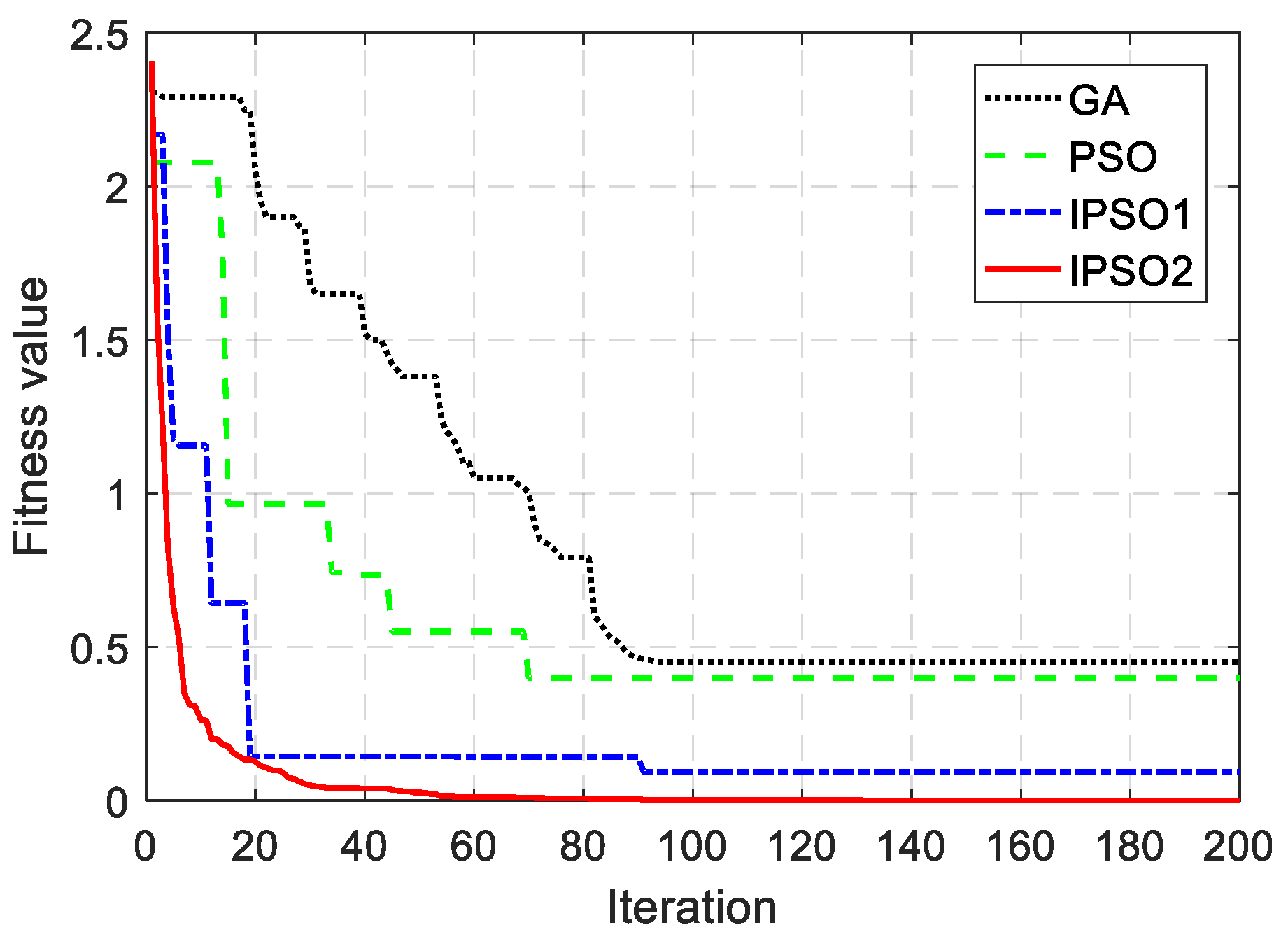
4.1. Parameter Identification Experiment
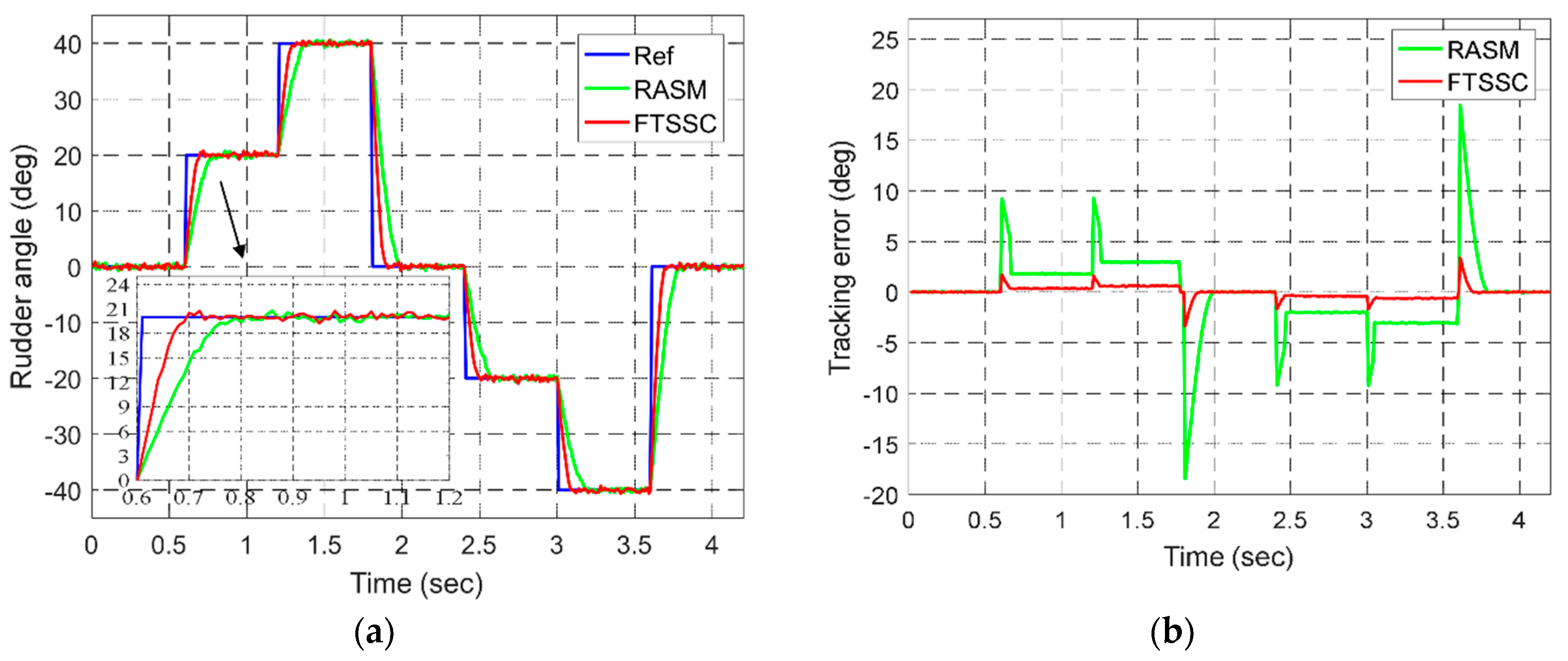
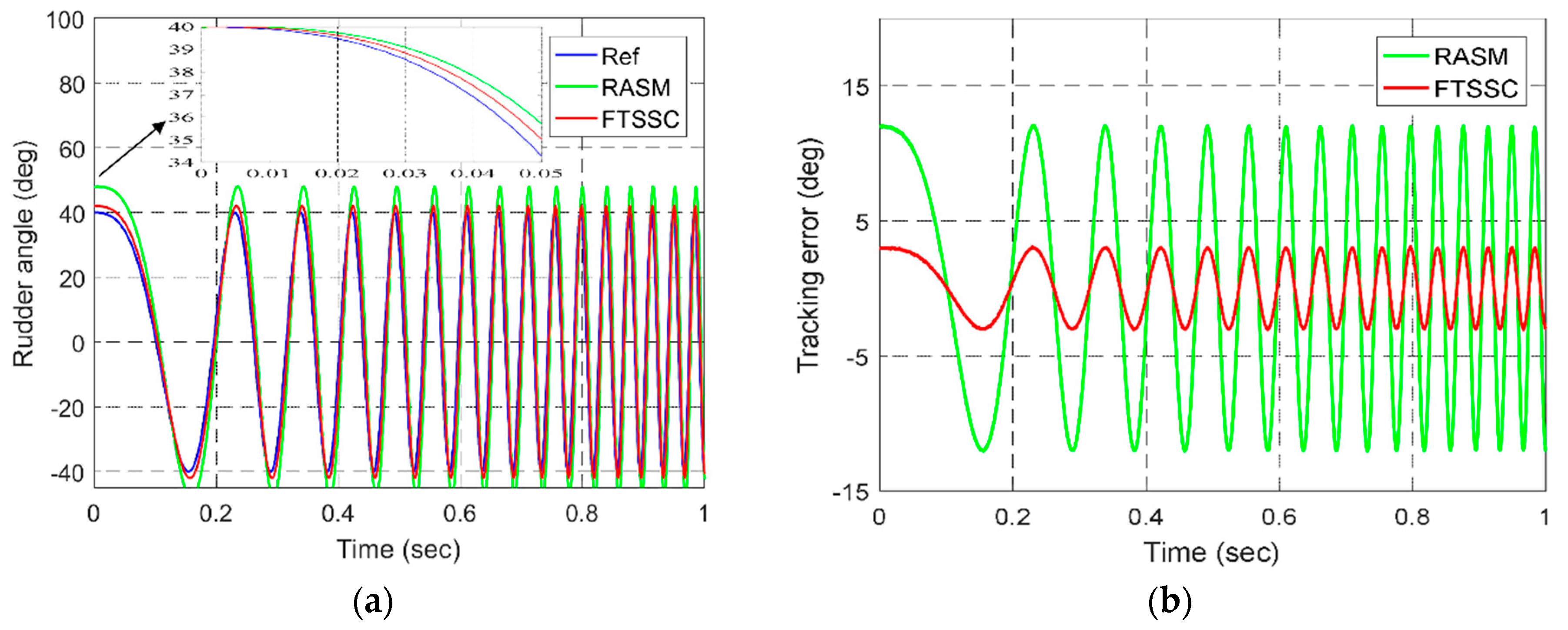
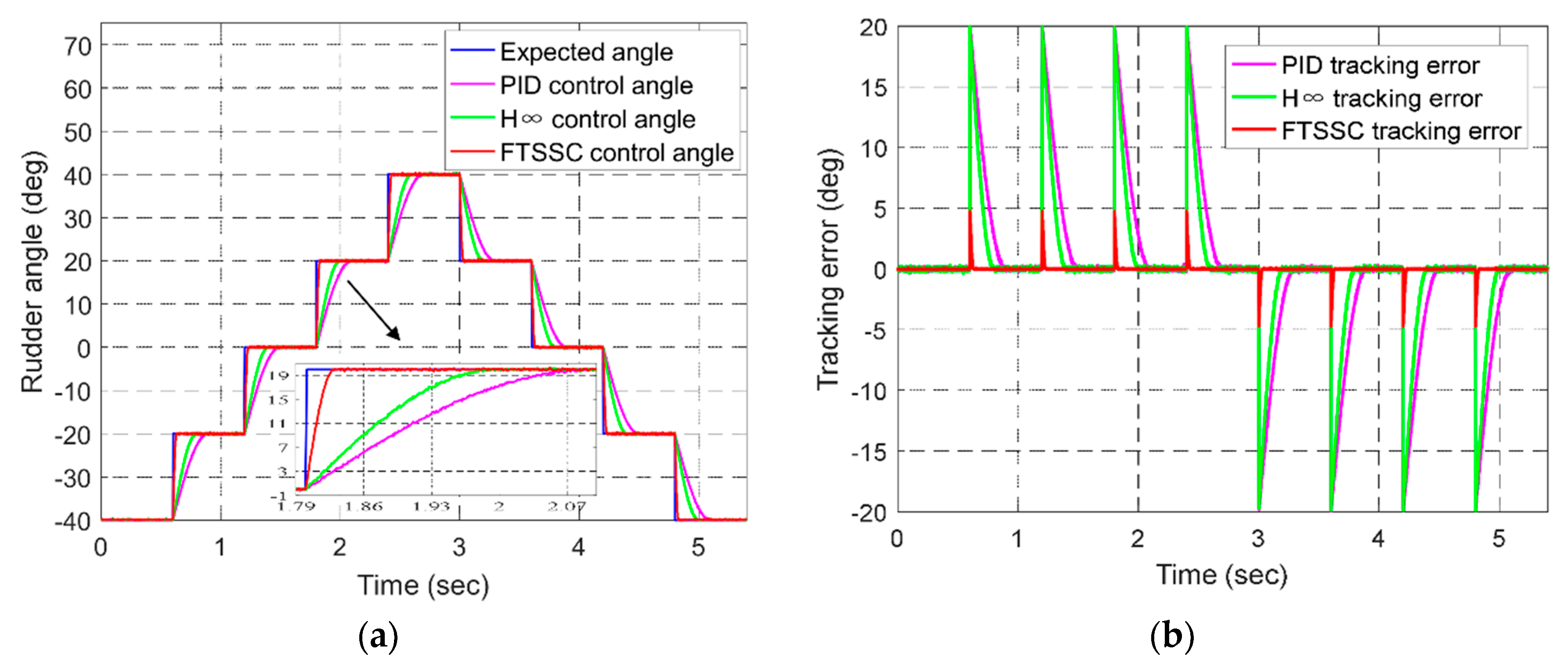
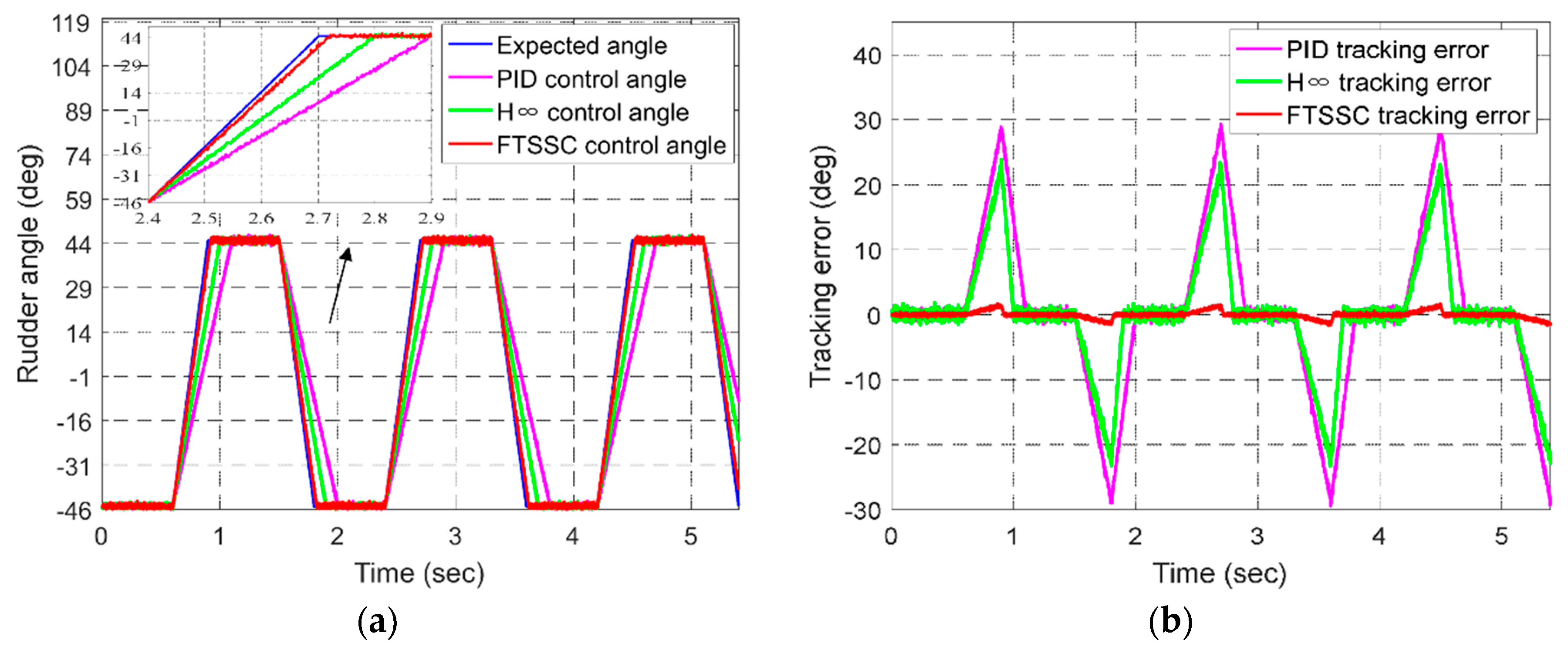
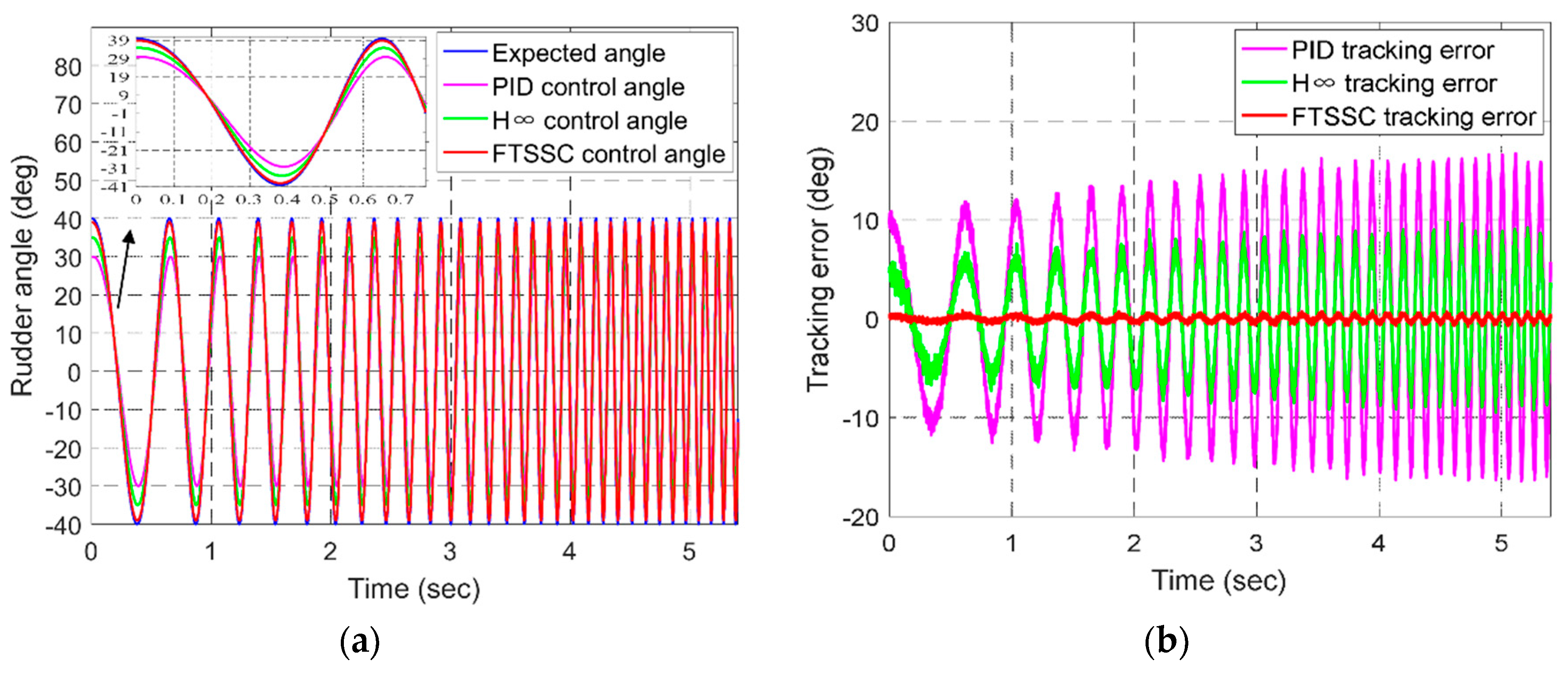
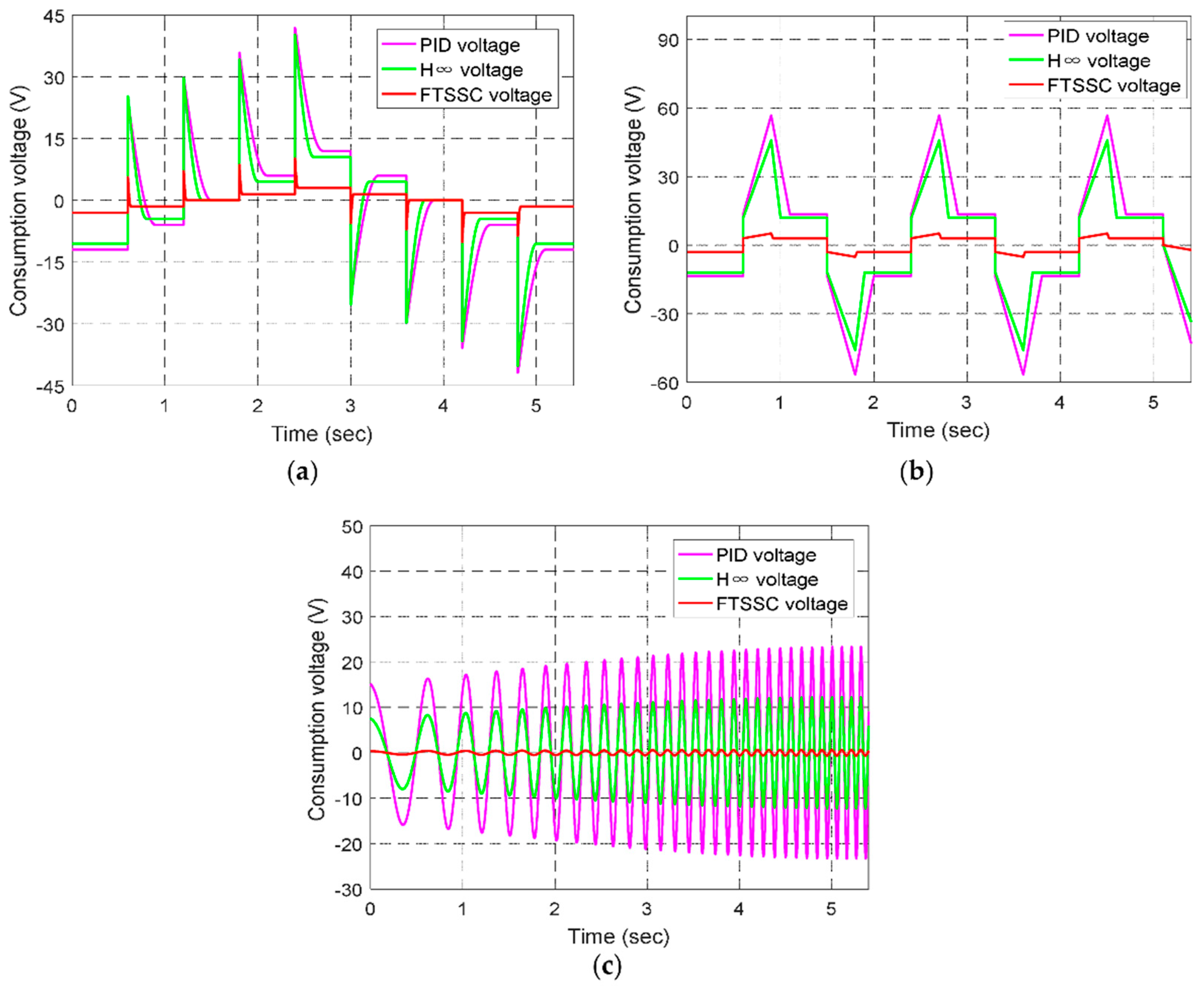
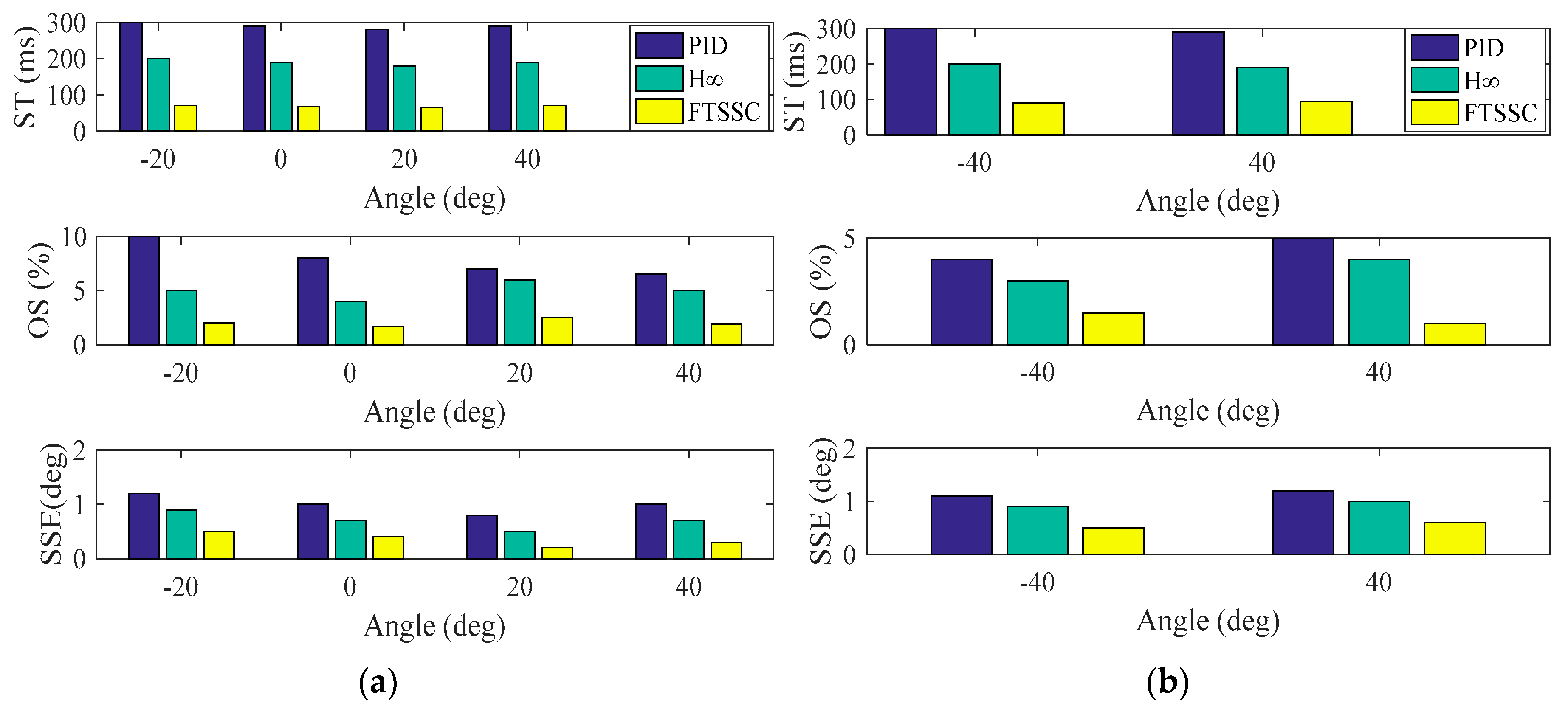
4.2. Controller Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chang, J. Test method and model identification of flight control actuator based on video acquisition. Master Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Shi, Z.; Wang, Y.; Ji, Z. A multi-innovation recursive least squares algorithm with a forgetting factor for Hammerstein CAR systems with backlash. Circuits Syst. Signal Process. 2016, 35, 4271–4289. [Google Scholar] [CrossRef]
- She, M.; Zhao, P. Hankel matrix correlation function-based subspace identification method for UAV servo system. Int. J. Aerosp. Eng. 2018, 10, 1155–1163. [Google Scholar] [CrossRef]
- Claes, M.; Graham, M. Frequency domain subspace identification of a tape servo system. Microsyst. Technol. 2007, 13, 1439–1447. [Google Scholar] [CrossRef]
- Liu, G.; Shen, G. Experimental evaluation of the parameter-based closed-loop transfer function identification for electro-hydraulic servo systems. Adv. Mech. Eng. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Thomas, G.; Lingai, L.; Dominique, T. Identification of optimal parameters for a small-scale compressed-air energy storage system using real coded genetic algorithm. Energies 2019, 12, 377–408. [Google Scholar]
- Liu, H.; Lin, Z.; Xu, Y. Coverage uniformity with improved genetic simulated annealing algorithm for indoor Visible Light Communications. Opt. Commun. 2019, 439, 156–163. [Google Scholar] [CrossRef]
- Liao, J.; Yin, F.; Luo, Z. The parameter identification method of steam turbine nonlinear servo system based on artificial neural network. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 165. [Google Scholar] [CrossRef]
- Chen, X.; Li, D.; Yang, X. Identification recurrent type 2 fuzzy wavelet neural network and L2-Gain adaptive variable sliding mode robust control of electro-hydraulic servo system (EHSS). Asian J. Control 2018, 20, 1480–1490. [Google Scholar] [CrossRef]
- Seok, J. Mechanical parameter identification of servo systems using robust support vector regression. Trans. Korean Inst. Power Electron. 2005, 10, 468–480. [Google Scholar]
- Wang, J. Research on parameter optimization method of electric rudder system. Master’s Thesis, North University of China, Taiyuan, China, 2012. [Google Scholar]
- Gao, G.; Liu, F.; San, H. Hybrid optimal kinematic parameter identification for an industrial robot based on BPNN-PSO. Complexity 2018, 10, 16–26. [Google Scholar] [CrossRef]
- Deur, J.; Pavkovic, D.; Peric, C. An electronic throttle control strategy including compensation of friction and limp-home effects. IEEE Trans. Ind. Appl. 2003, 40, 821–834. [Google Scholar] [CrossRef]
- Li, Y.; Yang, B.; Zheng, T. Extended-state-observer-based double-loop integral sliding-mode control of electronic throttle valve. IEEE Trans. Intell. Transp. Syst. 2015, 2015. 16, 2501–2510. [Google Scholar] [CrossRef]
- Zhu, X.; Tao, G.; Yao, B. Adaptive robust posture control of a parallel manipulator driven by pneumatic muscles. Automatica 2008, 44, 2248–2257. [Google Scholar] [CrossRef]
- Wang, H.; Liu, L.; He, P. Robust adaptive position control of automotive electronic throttle valve using PID-type sliding mode technique. Nonlinear Dyn. 2016, 85, 1331–1344. [Google Scholar] [CrossRef]
- Shieh, N.; Tung, P.; Lin, C. Robust output tracking control of a linear brushless DC motor with time-varying disturbances. IEE Proc. -Electr. Power Appl. 2002, 149, 39–45. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. Soc. Ind. Appl. Math. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Bhat, P.; Bernstein, S. Geometric homogeneity with applications to finite-time stability. Mathematics of Control, Signals, and Systems (MCSS) 2005, 17, 101–127. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Lin, W.; Yang, B. Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 2005, 41, 881–888. [Google Scholar] [CrossRef]
- Bhat, S.; Bernstein, D. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Wen, C.; Wang, W. Design of adaptive finite-time controllers for nonlinear uncertain systems based on given transient specifications. Automatica 2016, 69, 395–404. [Google Scholar] [CrossRef]
- Li, G. Research on several problems based on finite time control theory. Master’s Thesis, Southeast University, Nanjing, China, 2016. [Google Scholar]
- Zhang, L.; Wang, S. Karimi, H. Robust finite-time control of switched linear systems and application to a class of servomechanism systems. IEEE/ASME Trans. Mechatron. 2015, 20, 1–10. [Google Scholar] [CrossRef]
- Li, G.; Jiao, X. Synthesis and validation of finite time servo control with PSO identification for automotive electronic throttle. Nonlinear Dyn. 2017, 90, 1165–1177. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. IEEE Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Kameyama, K. Particle swarm optimization: a survey. J. Comput. Res. Dev. 2009, 92, 1724–1731. [Google Scholar] [CrossRef]
- Kwok, N.M.; Ha, Q.P.; Nguyen, T.H. A novel hysteretic model for magnetorheological fluid dampers and parameter identification using particle swarm optimization. Sensors and Actuators A (Physical) 2006, 132, 441–451. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Ratnaweera, A.; Halgamuge, S.K.; Watson, H.C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients. IEEE Press 2004, 8, 240–255. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| J | 0.0031 | kgm2 |
| B | 0.0098 | Nm s/rad |
| Kt | 0.0175 | Nm/A |
| Ke | 0.0295 | V s/rad |
| ks | 0.0877 | Nm/rad |
| TLH | 0.46 | Nm |
| Fc | 0.34 | Nm |
| R | 1.55 | Ω |
| L | 1.6 | mH |
| 15 | ° | |
| n | 22.26 | / |
| Parameters | Theoretical Value | Mean Value of the Identification Parameter (30 Trials) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| GA | PSO | IPSO1 | IPSO2 | ||||||
| PE | PE | PE | PE | ||||||
| L | 0.005 | 0.0041 | 0.18 | 0.0045 | 0.1 | 0.0047 | 0.06 | 0.0049 | 0.02 |
| R | 1.5 | 1.53 | 0.02 | 1.55 | 0.033 | 1.52 | 0.013 | 1.508 | 0.005 |
| ks | 0.1 | 0.080 | 0.2 | 0.075 | 0.25 | 0.088 | 0.12 | 0.098 | 0.02 |
| TLH | 0.1 | 0.095 | 0.05 | 0.092 | 0.08 | 0.095 | 0.05 | 0.098 | 0.02 |
| Fc | 0.01 | 0.008 | 0.2 | 0.008 | 0.2 | 0.009 | 0.1 | 0.0098 | 0.02 |
| J | 0.004 | 0.0032 | 0.2 | 0.0035 | 0.125 | 0.0037 | 0.075 | 0.0038 | 0.05 |
| B | 0.8 | 0.769 | 0.039 | 0.751 | 0.061 | 0.772 | 0.035 | 0.783 | 0.021 |
| Kt | 0.93 | 0.89 | 0.043 | 0.902 | 0.03 | 0.925 | 0.005 | 0.934 | 0.004 |
| Ke | 0.005 | 0.0044 | 0.12 | 0.0042 | 0.16 | 0.0045 | 0.1 | 0.0049 | 0.02 |
| APE | 0.117 | 0.115 | 0.062 | 0.02 | |||||
| Experiment | Reference/° | ts/ms | ||
|---|---|---|---|---|
| 1 | −40 to −20 up | 70 | 2% | 0.5 |
| −20 to 0 up | 65 | 1.7% | 0.4 | |
| 0 to 20 up | 68 | 2.5% | 0.2 | |
| 20 to 40 up | 80 | 1.9% | 0.3 | |
| 2 | −45 to 45 ramp | 90 | 1.5% | 0.5 |
| 45 to −45 ramp | 95 | 1% | 0.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Yang, R.; Guo, C.; Ge, S.; Chen, X. Analysis and Verification of Finite Time Servo System Control with PSO Identification for Electric Servo System. Energies 2019, 12, 3578. https://doi.org/10.3390/en12183578
Wu Z, Yang R, Guo C, Ge S, Chen X. Analysis and Verification of Finite Time Servo System Control with PSO Identification for Electric Servo System. Energies. 2019; 12(18):3578. https://doi.org/10.3390/en12183578
Chicago/Turabian StyleWu, Zhihong, Ruifeng Yang, Chenxia Guo, Shuangchao Ge, and Xiaole Chen. 2019. "Analysis and Verification of Finite Time Servo System Control with PSO Identification for Electric Servo System" Energies 12, no. 18: 3578. https://doi.org/10.3390/en12183578
APA StyleWu, Z., Yang, R., Guo, C., Ge, S., & Chen, X. (2019). Analysis and Verification of Finite Time Servo System Control with PSO Identification for Electric Servo System. Energies, 12(18), 3578. https://doi.org/10.3390/en12183578