Multiple-Point Voltage Control to Minimize Interaction Effects in Power Systems

Abstract
:1. Introduction
2. Multiple-Point Control Algorithm for the CVC
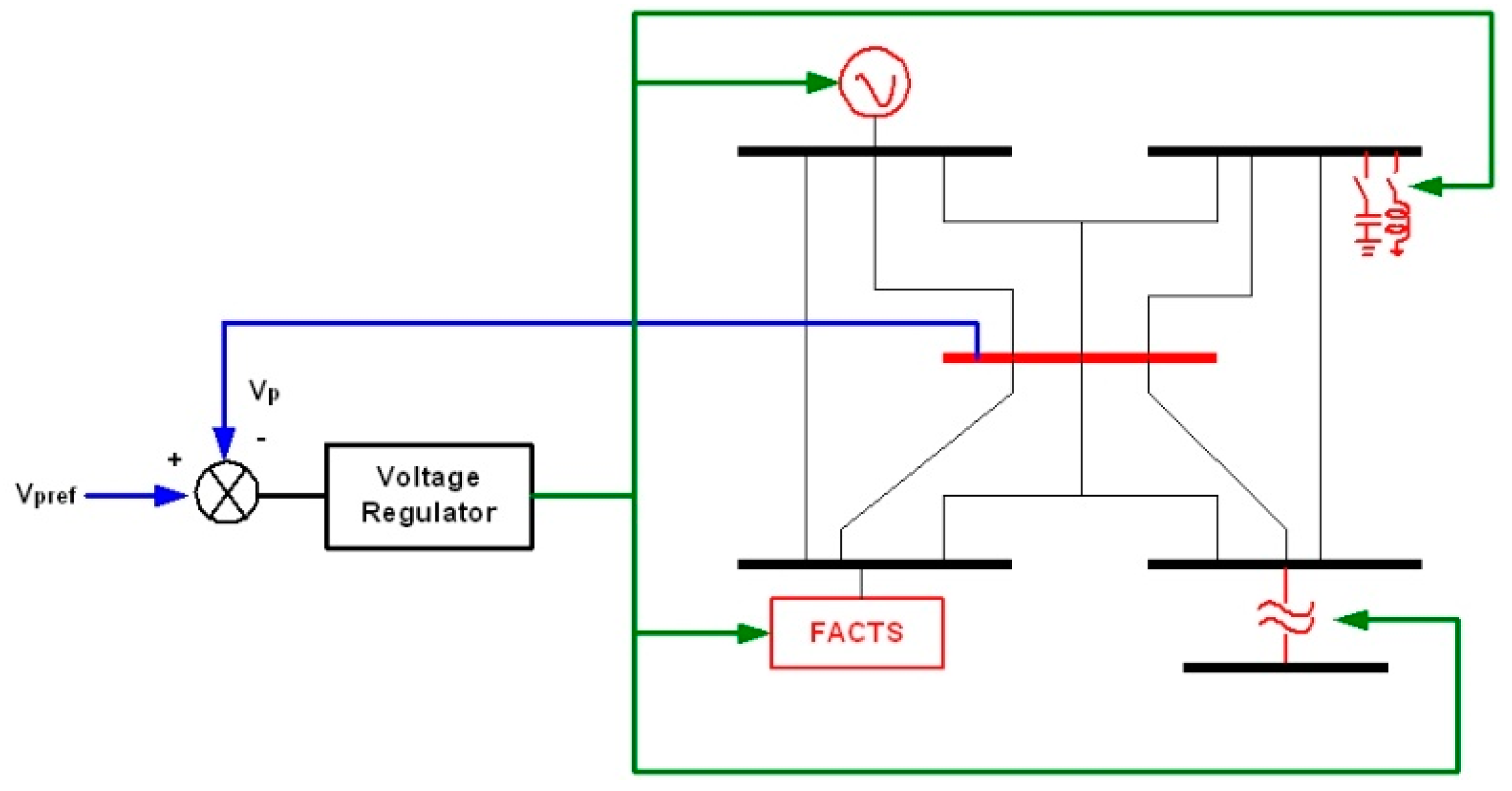
2.1. Principle of the Control Algorithm
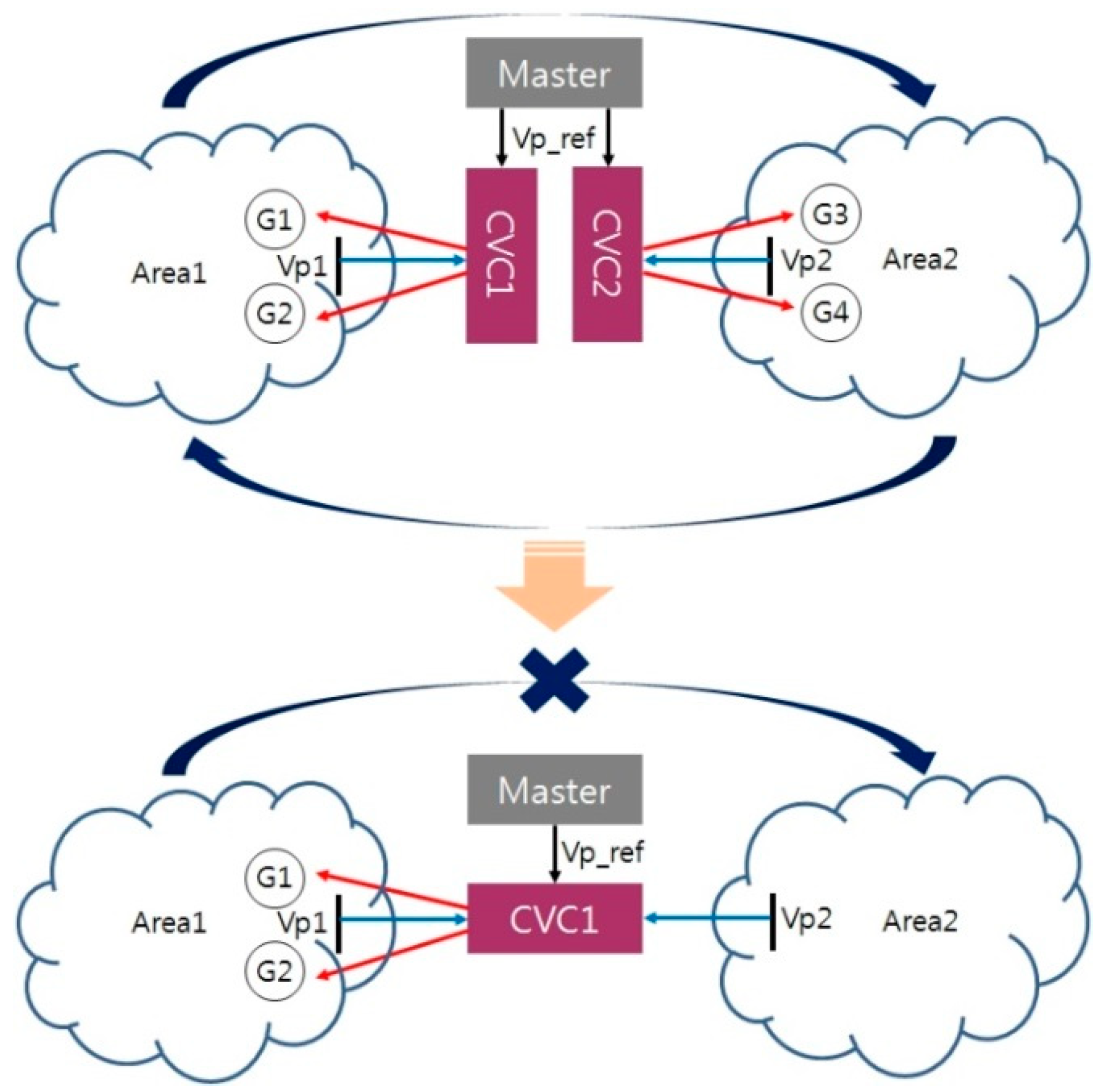
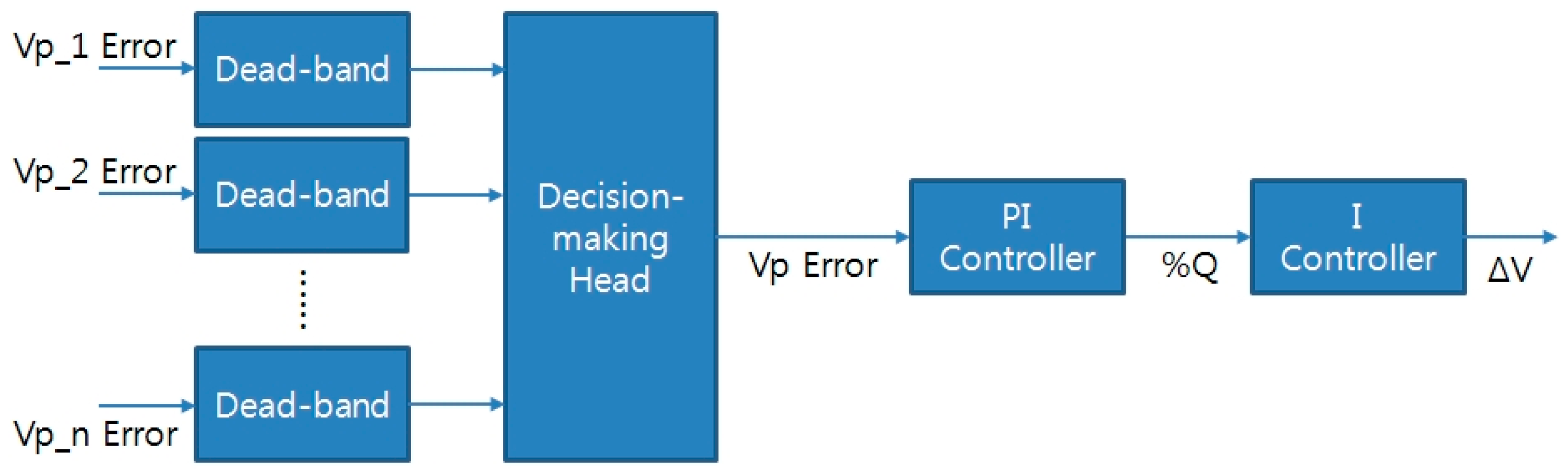
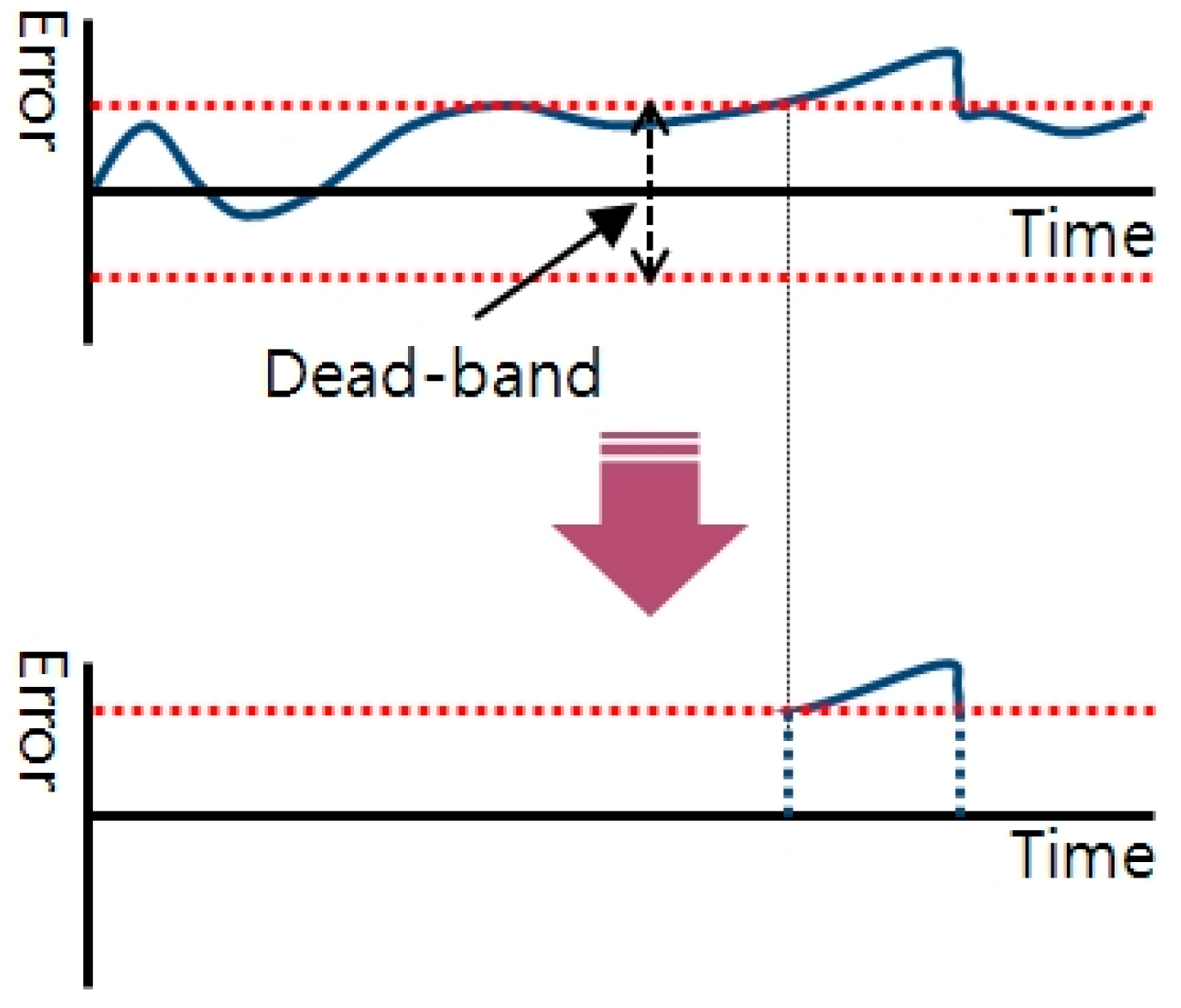
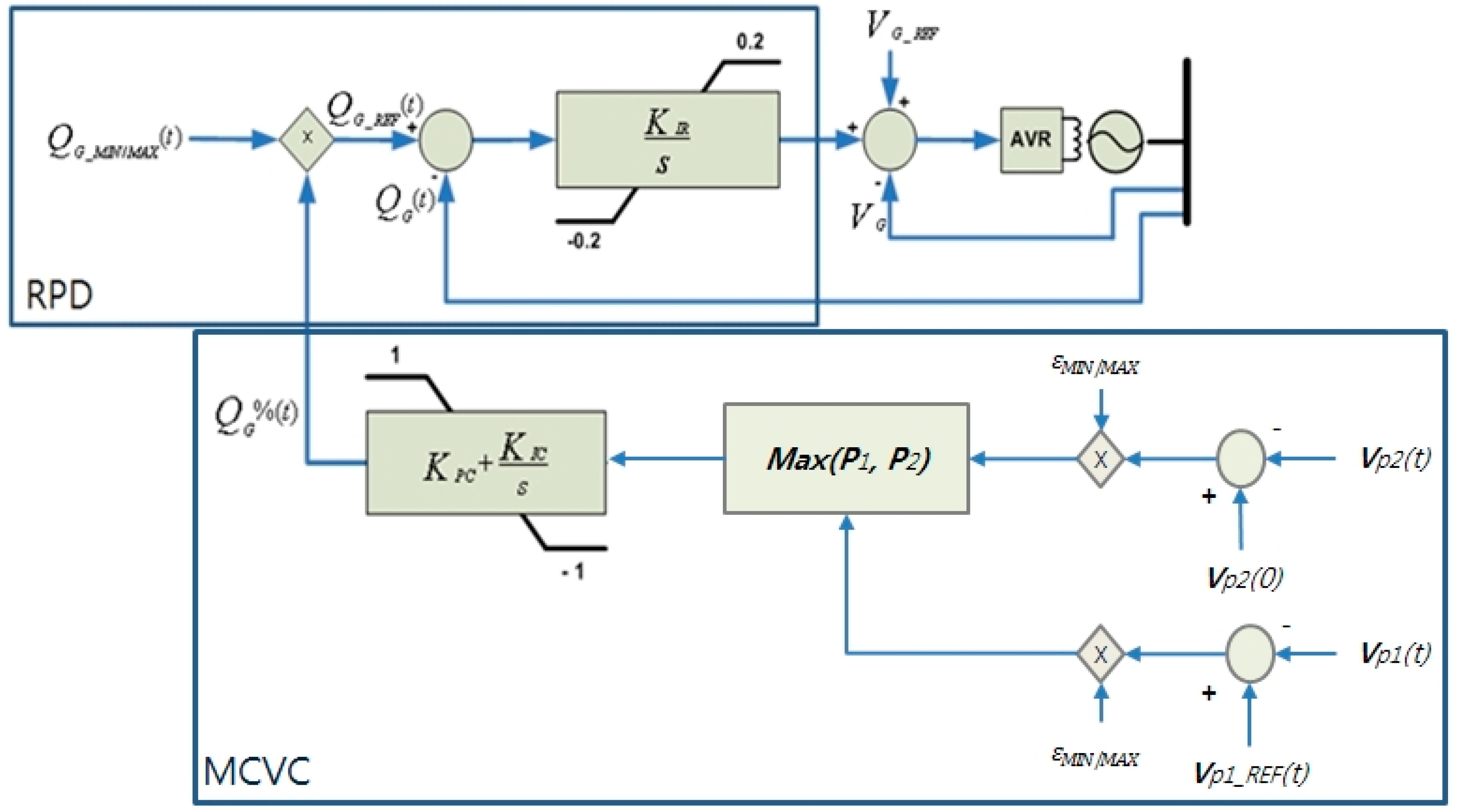
2.2. Operating Mechanism of the Control Algorithm
- represent the voltage error;
- VP1(t) represents the present voltage of the target pilot point at time t;
- VP2(t),…, VPN(t) represent the present voltages of the participating pilot points from the 2nd to the Nth adjacent zone at time t, respectively;
- VP_REF1(t) is the reference voltage of the target pilot point at time t; and
- VP2(0),…, VPN(0) are initial voltages of pilot points that are included in the 2nd to the Nth adjacent zone at the initial time, respectively.
- QG%(t) is the reactive power to be generated in each RPD, and KPC and KIC are the proportional and integral gain, respectively, in the MCVC.
- QG(t) represents the reactive power of each generator at time t;
- QG_REF(t) is the reference reactive power at time t;
- QG%(t) is the reactive power to be generated according to the MCVC control signals;
- QG_MIN/MAX(t) is the lower/upper limit of the reactive power; and
- KIR is the integral gain in the RPD.
- ΔQi and ΔQj are the reactive power of the load and the generator, respectively; Bii, Bij, Bji, and Bjj are the transmission line conductance; ΔVi and ΔVj are the voltage of the bus, respectively.
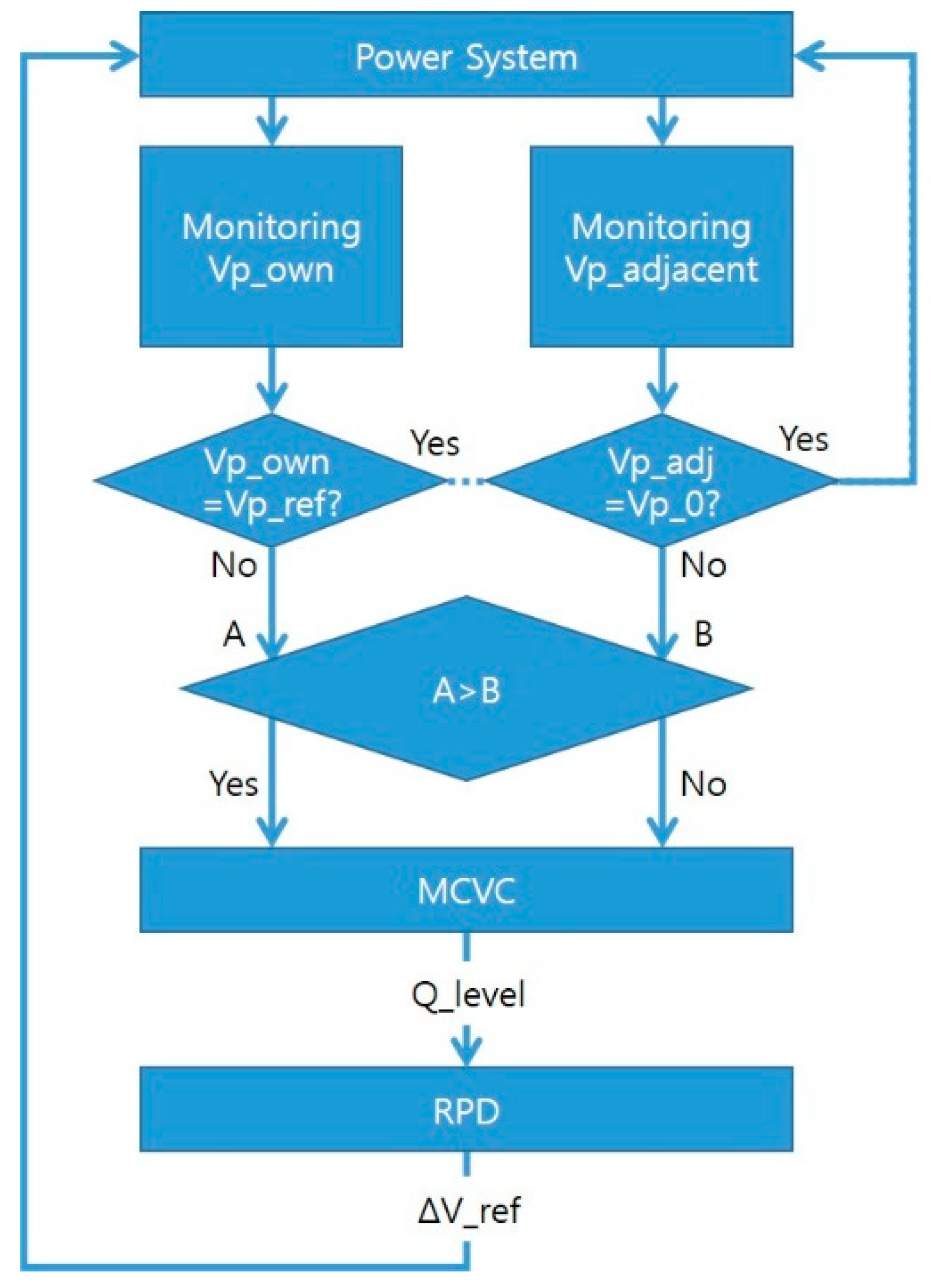
3. Control Scheme for the MCVC
- Step 1.
- Monitor the pilot points in the control zones of the target power system.
- Step 2.
- Compare the voltage of a target pilot point to its reference voltage.
- Step 3.
- Compare the voltages of pilot points in neighboring zones with their present voltage.
- Step 4.
- Select the control target with the smallest voltage violation among pilot points.
- Step 5.
- Go to step 1 if none of the pilot points have abnormal voltage.
- Step 6.
- According to the control target, determine the requisite reactive power ratios of generators with the MCVC algorithm.
- Step 7.
- According to these reactive power ratios, determine the terminal reference voltages of control generators with the RPD.
- Step 8.
- Repeat the control process from steps 1 to 3.
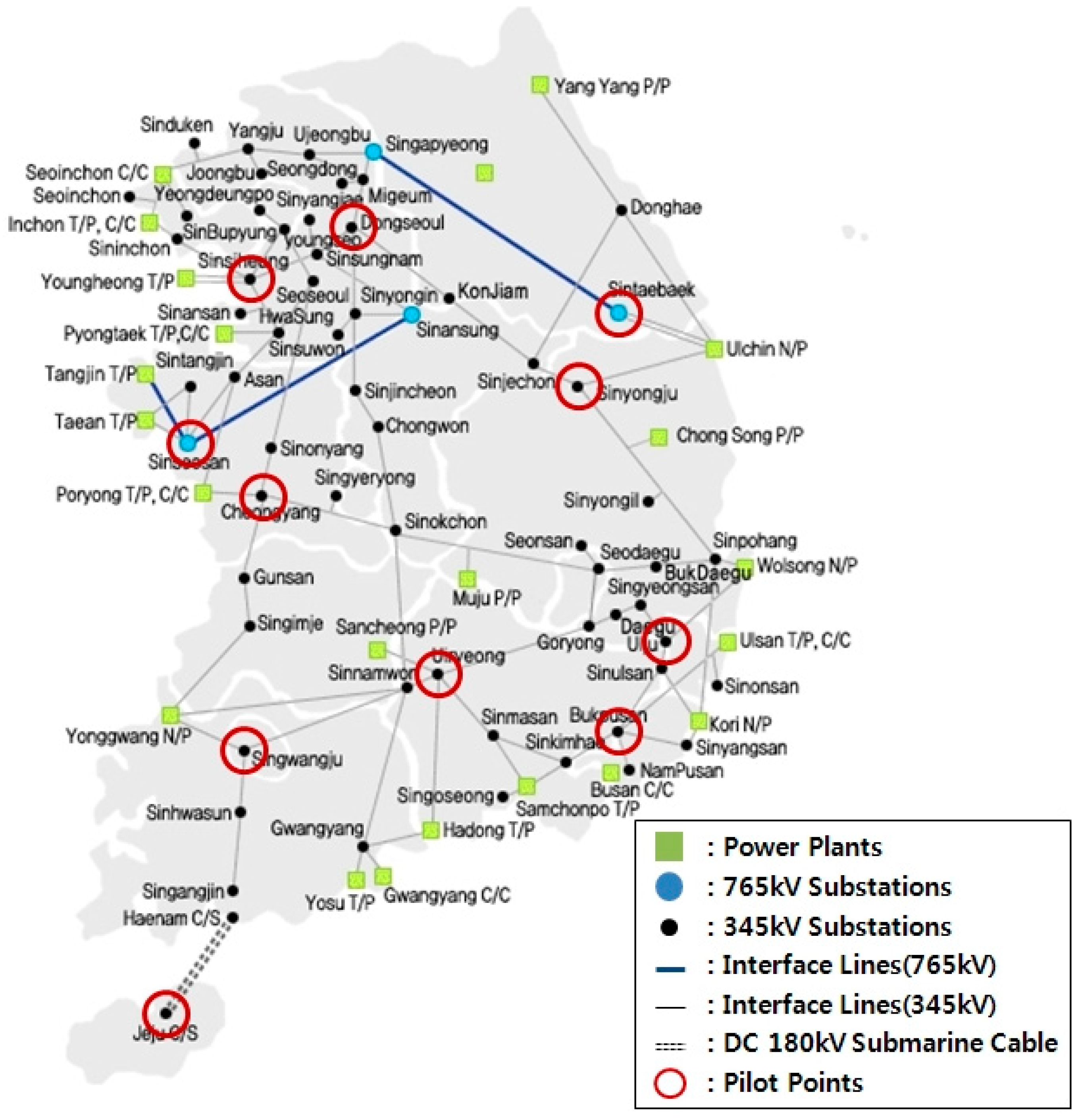
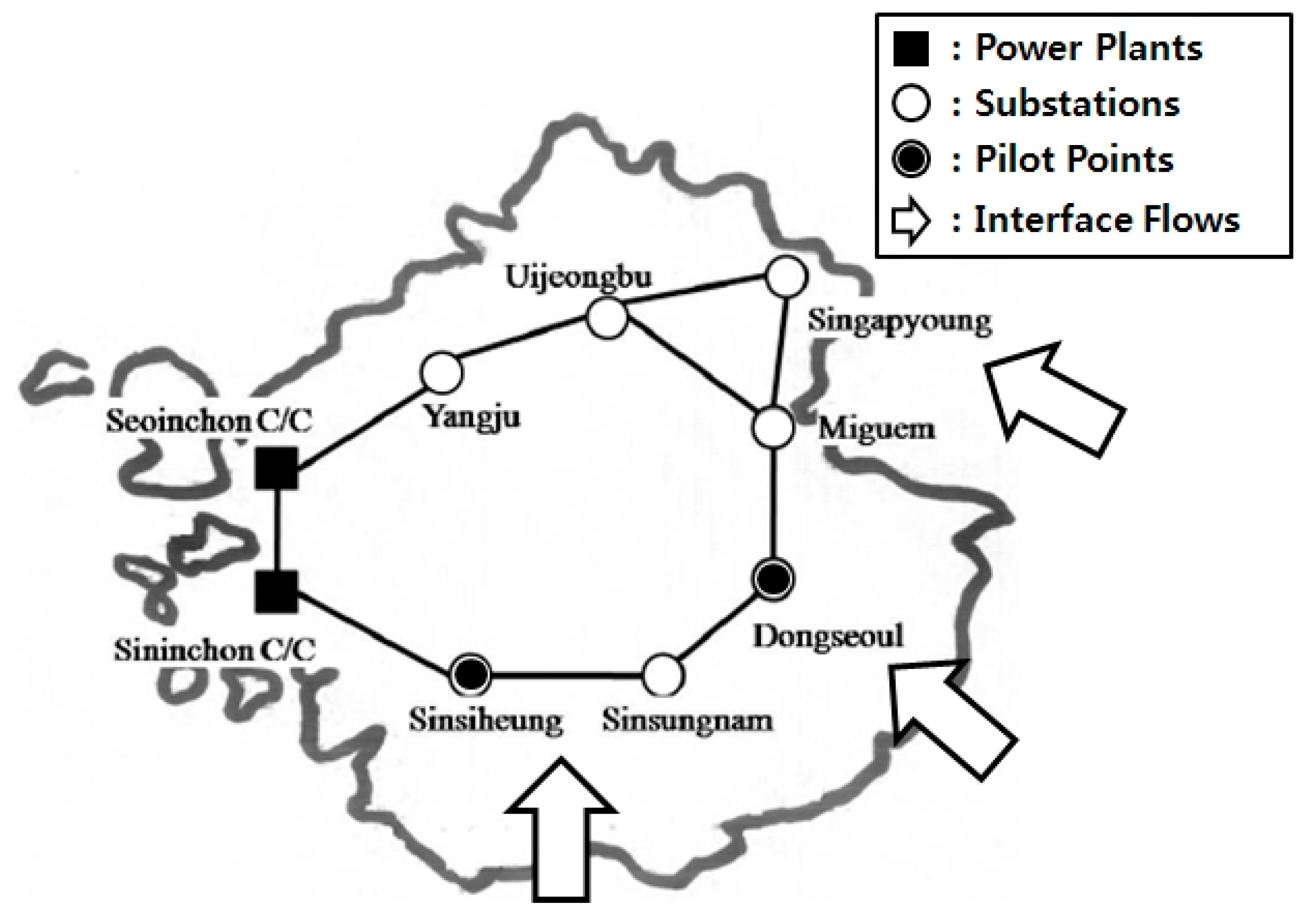
4. Characteristics of the Korean Power System
4.1. Summary of the Korean Power System
4.2. Difficulties of CVC Application in the Korean Power System
5. Simulation Results
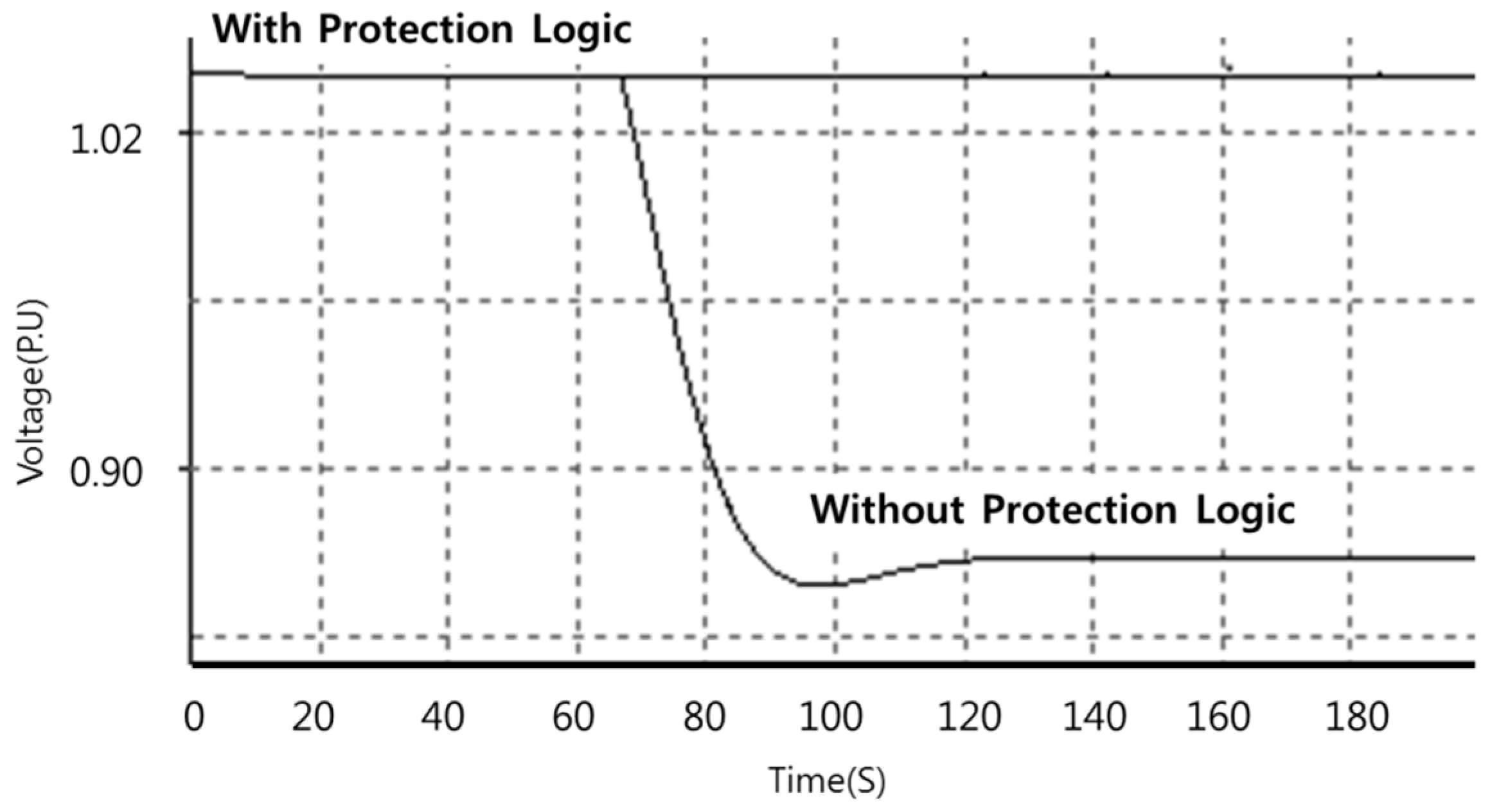
5.1. Case (I) Protection Logic Test
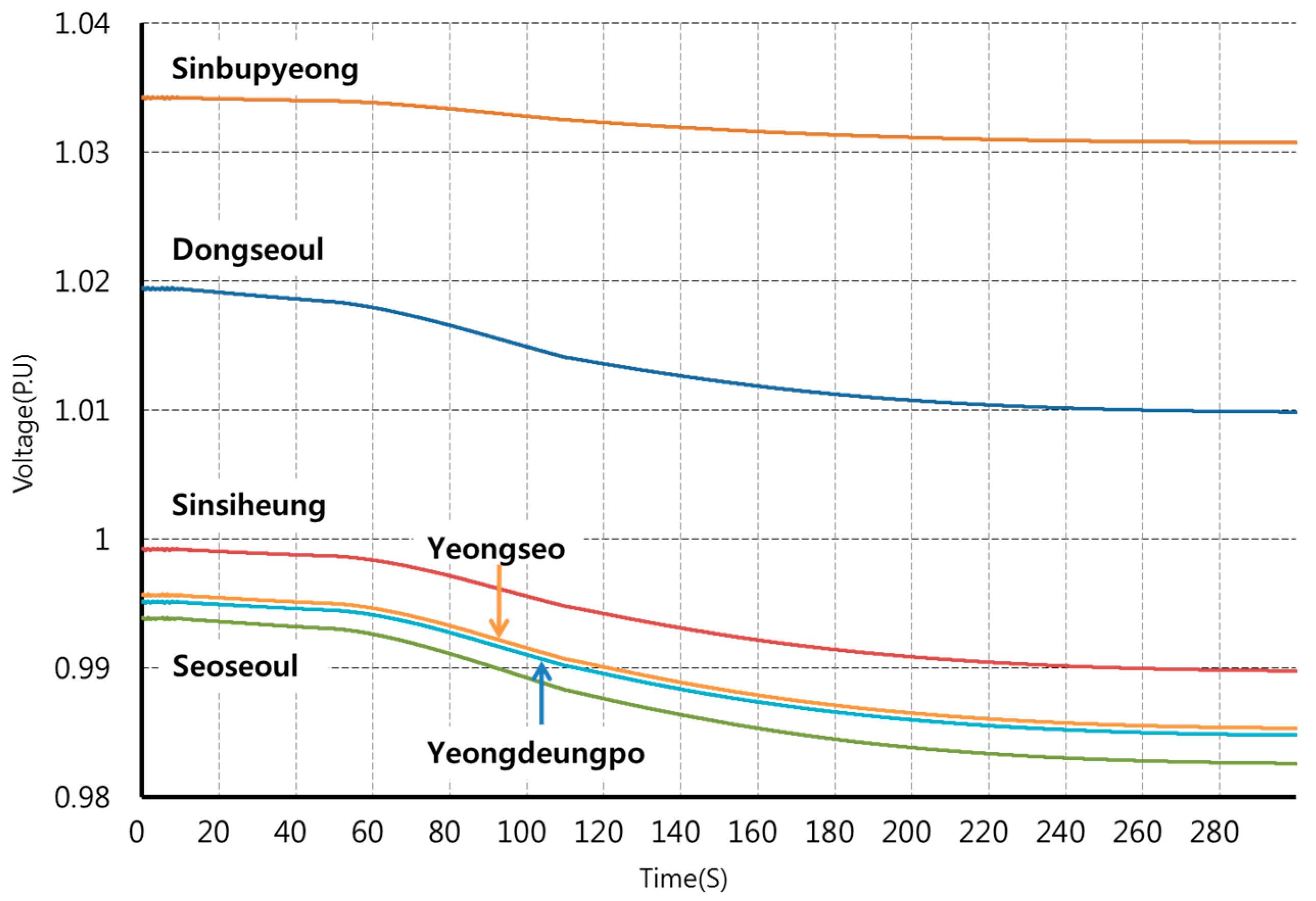
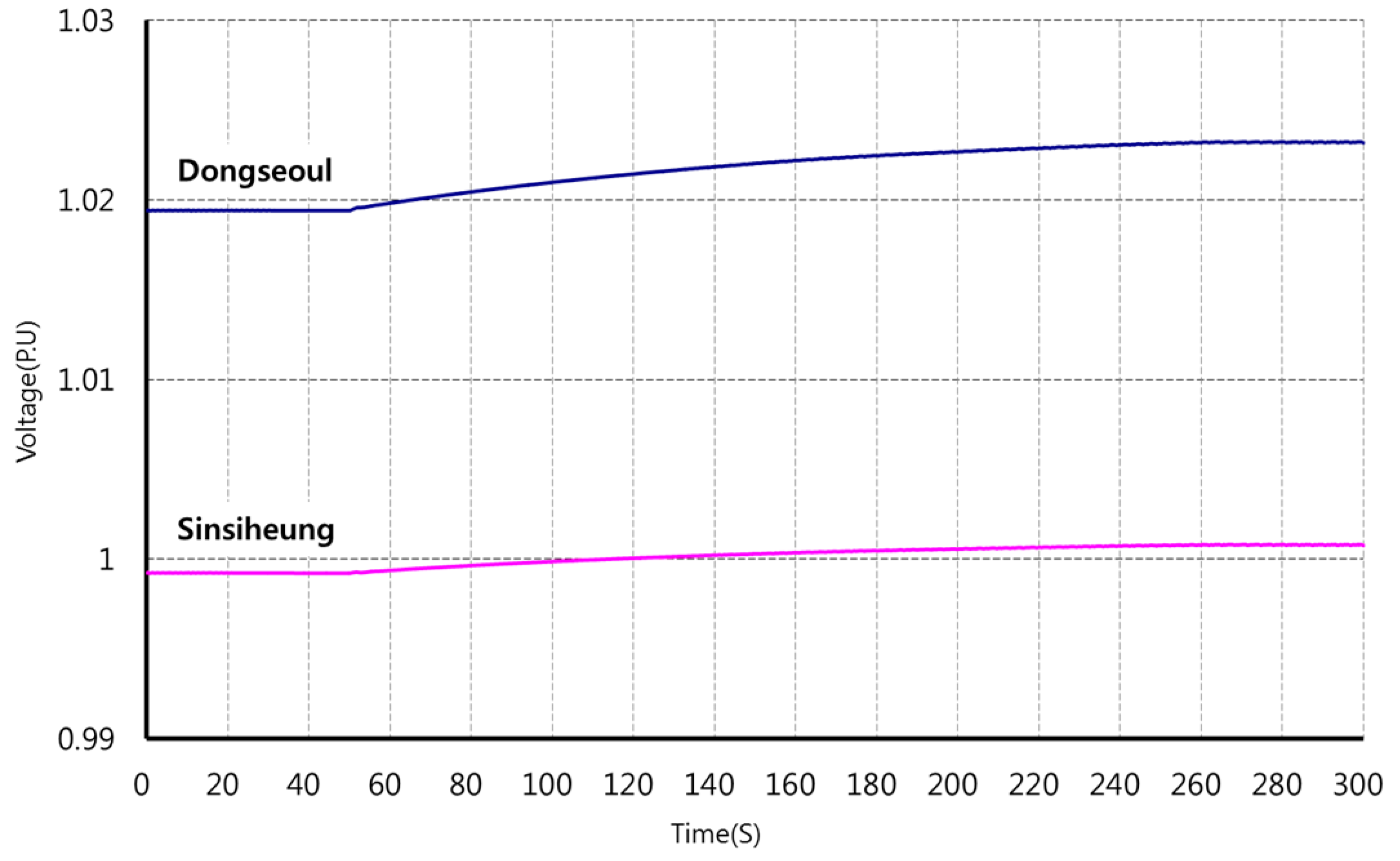
5.2. Case (II) Target Voltage Change of a Pilot Point
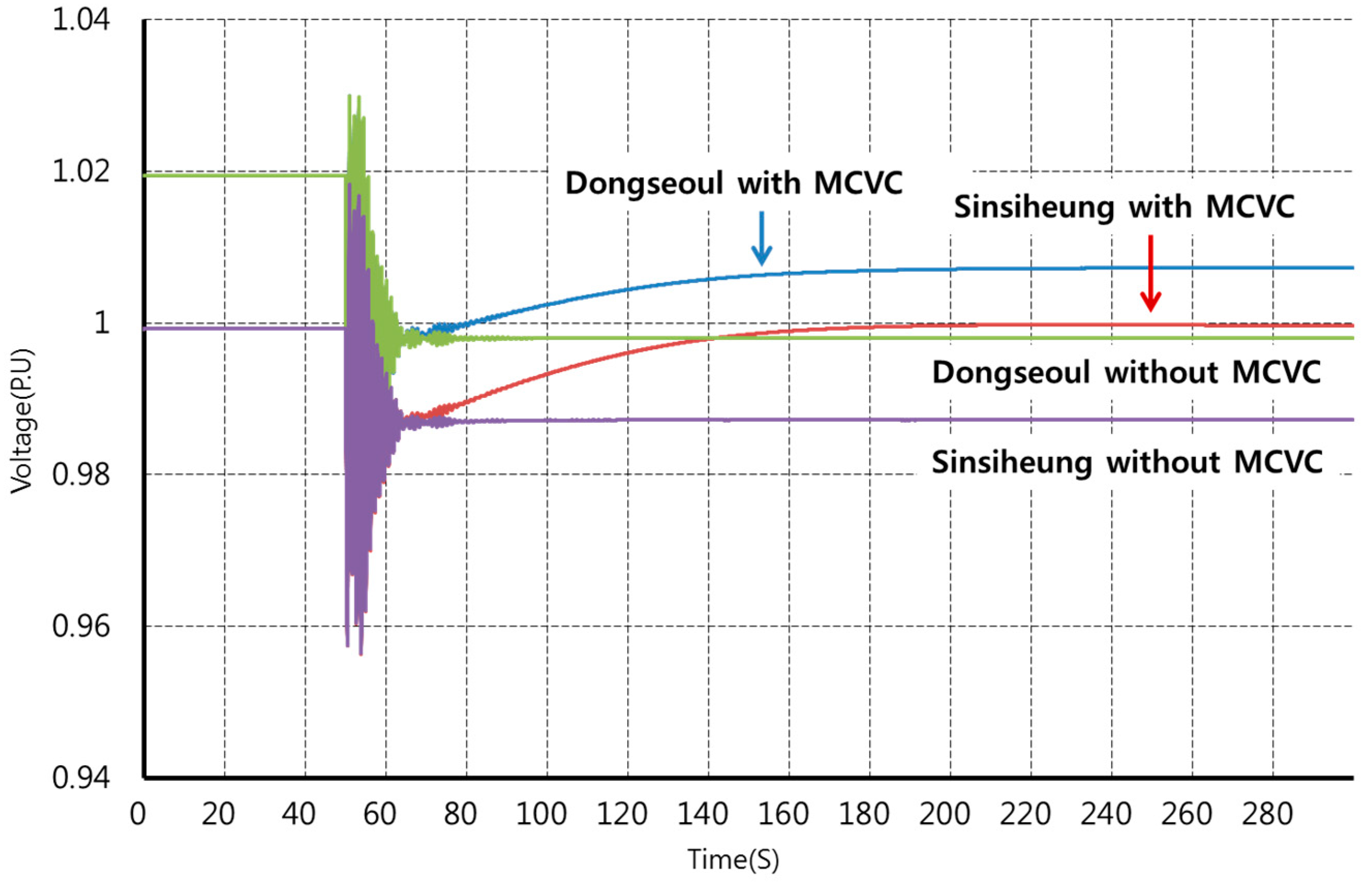
5.3. Case (III) Contingency Scenario of an Interface Root
5.4. Case (IV) Load Increase of the Hwasung–Asan Transmission Line
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Taylor, C.W. Power System Voltage Stability; McGraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Cutsem, T.V.; Vournas, C. Voltage Stability of Electric Power Systems; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1998. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Ilic, M.; Liu, S. Hierarchical Power System Control; Springer: Berlin, Germany, 1996. [Google Scholar]
- Seo, S.; Choi, Y.H.; Kang, S.; Lee, B.; Shin, J.H.; Kim, T.K. Hybrid control system for managing voltage and reactive power in the JEJU power system. J. Electr. Eng. Technol. 2009, 4, 429–437. [Google Scholar] [CrossRef]
- Corsi, S. Feasibility Study of the Automatic Voltage Control of the KEPCO Transmission Grid; Intermediate Report; CESI: Milan, Italy, 2010. [Google Scholar]
- Ali, E.; Li, J.; Xie, J.; Joshua, D.I. Closed-loop identification for plants under model predictive control. Control Eng. Pract. 2018, 72, 206–218. [Google Scholar]
- Robert, L.C.; John, F.O. Large feedback control design with limited plant information. Control Eng. Pract. 2018, 72, 219–229. [Google Scholar]
- Kim, T.K.; Choi, Y.H.; Seo, S.S.; Lee, B.J. A study on voltage and reactive power control methodology using integer programming and local subsystem. Trans. Korean Inst. Electr. Eng. (KIEE) 2018, 57, 543–550. [Google Scholar]
- Choi, Y.H.; Lee, B.; Kim, T.K. Optimal shunt compensation for improving voltage stability and transfer capability in metropolitan area of the Korean power system. J. Electr. Eng. Technol. 2015, 10, 1502–1507. [Google Scholar] [CrossRef]
- Kvasov, D.E.; Menniti, D.; Pinnarelli, A.; Sergeyev, Y.D.; Sorrentino, N. Tuning fuzzy power-system stabilizers in multi-machine systems by global optimization algorithms based on efficient domain partitions. Electr. Power Syst. Res. 2008, 78, 1217–1229. [Google Scholar] [CrossRef]
- Sheng, G.; Jiang, X.; Duan, D.; Tu, G. Framework and implementation of secondary voltage regulation strategy based on multi-agent technology. Int. J. Electr. Power Energy Syst. 2009, 31, 67–77. [Google Scholar] [CrossRef]
- Choi, Y.H.; Lee, B.; Kang, S.; Kwon, S.H. Coordinated voltage-reactive power control schemes based on PMU measurement at automated substations. J. Electr. Eng. Technol. 2001, 10, 1400–1407. [Google Scholar] [CrossRef]
- Powell, L. Power System Load Flow Analysis; McGraw Hill: New York, NY, USA, 2004; pp. 101–105. [Google Scholar]
- Lee, B.; Song, H.; Kwon, S.H.; Jang, G.; Kim, J.H.; Ajjarapu, V. A study on determination of interface flow limits in the KEPCO system using modified continuation power flow (MCPF). IEEE Trans. Power Syst. 2002, 17, 557–564. [Google Scholar]
- Available online: http://www.kpx.or.kr/english/ (accessed on 12 August 2018).
- Kang, S.G.; Seo, S.; Lee, B.; Chang, B.; Myung, R. Centralized control algorithm for power system performance using FACTS devices in the korean power system. J. Electr. Eng. Technol. 2010, 5, 353–362. [Google Scholar] [CrossRef]
- Capitanescu, F. Assessing reactive power reserves with respect to operating constraints and voltage stability. IEEE Trans. Power Syst. 2011, 26, 2224–2234. [Google Scholar] [CrossRef]
- Choi, Y.H.; Seo, S.; Kang, S.; Lee, B. Justification of Effective Reactive Power Reserves with respect to a Particular Bus using Linear Sensitivity. IEEE Trans. Power Syst. 2011, 26, 2118–2124. [Google Scholar] [CrossRef]
- Choi, Y.H.; Lee, B.; Kim, T.K.; Shin, J.H.; Cho, J.M.; Jung, E.; Kang, B.I. Identification of Voltage Control Areas and Reactive Power Reserves in Power Flow Traceable System for Voltage Stability Assessment. In Proceedings of the System Operation and Control of Electric Power Systems CIGRE Regional Meeting, Recife, Brazil, 3–6 April 2011. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | QG_MAX [MVAR] | QG_MIN [MVAR] | Xt | Xeq | TCS [s] | TRS [s] | KPC | KIC |
|---|---|---|---|---|---|---|---|---|
| Yonggwang NP | 387.0 | −160.0 | 0.1248 | 0.0010 | 50 | 5 | 26.7094 | 67.2009 |
| Tangjin TP | 270.0 | −164.0 | 0.2636 | 0.0010 | 50 | 5 | 22.2875 | 117.9546 |
| Seoinchon CC | 108.0 | −70.0 | 0.0980 | 2.0175 | 50 | 5 | 25.1953 | 0.5284 |
| Youngheong TP | 384.0 | −262.0 | 0.0980 | 2.0175 | 50 | 5 | 25.1953 | 0.5284 |
| Pyongtaek TP | 150.0 | −89.0 | 0.4870 | 2.0175 | 50 | 5 | 55.4970 | 1.3779 |
| Area | Active Power [MW] | Reactive Power [MVAR] | Number of Installed Generators | ||
|---|---|---|---|---|---|
| Generations | Loads | Generations | Loads | ||
| Metropolitan | 13,779 | 22,034 | 3701 | 10,474 | 113 |
| Nonmetropolitan | 45,089 | 31,435 | 10,112 | 14,222 | 150 |
| Zone | Reactive Power Reserve [Mvar] |
|---|---|
| Dongseoul | 1022 |
| Sinsiheung | 5778 |
| Case | Description | Purpose of This Case |
|---|---|---|
| I | With and without protection logic | Show the usefulness of the protection logic |
| II | Increase the desired voltage of a pilot point | Test the effectiveness of following a desired voltage at the pilot point |
| III | Three-phase fault at the interface line | Check the effectiveness of the algorithm |
| IV | Load increase at the interface line | Comparison between the existing method and the proposed method |
| Interface Line | No. of Lines | Interface Flow Margins [MW] |
|---|---|---|
| Base | - | 2607.5 |
| Singapyeong–Sintaebaek | # 2 | 1761.8 |
| Sinansung–Sinseosan | # 2 | 1991.6 |
| Hwasung–Asan | # 2 | 776.1 |
| Seoseoul–Sinonyang | # 2 | 1492.6 |
| Sinyongin–Sinjincheon | # 2 | 2444.6 |
| Konjiam–Sinjechon | # 2 | 1406.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, Y.-H.; Cho, Y.-S. Multiple-Point Voltage Control to Minimize Interaction Effects in Power Systems. Energies 2019, 12, 274. https://doi.org/10.3390/en12020274
Choi Y-H, Cho Y-S. Multiple-Point Voltage Control to Minimize Interaction Effects in Power Systems. Energies. 2019; 12(2):274. https://doi.org/10.3390/en12020274
Chicago/Turabian StyleChoi, Yun-Hyuk, and Yoon-Sung Cho. 2019. "Multiple-Point Voltage Control to Minimize Interaction Effects in Power Systems" Energies 12, no. 2: 274. https://doi.org/10.3390/en12020274
APA StyleChoi, Y. -H., & Cho, Y. -S. (2019). Multiple-Point Voltage Control to Minimize Interaction Effects in Power Systems. Energies, 12(2), 274. https://doi.org/10.3390/en12020274