Control for Three-Phase LCL-Filter PWM Rectifier with BESS-Oriented Application


Abstract
:
1. Introduction
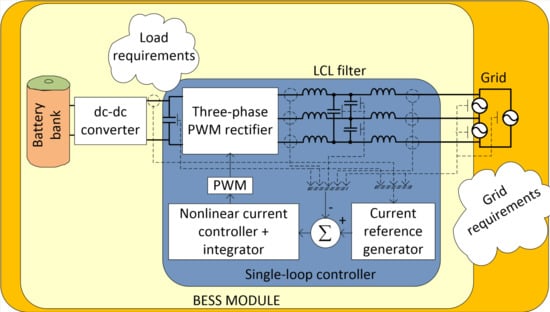
2. PWM Rectifier Topology within the BESS
3. Phase-Phase PWM Rectifier Model
- Assume that represents the combined battery bank and dc-dc converter dynamics. Hence, is computed with the sensed delivered current and the sensed output voltage, as specified in Equation (1). This consideration is valid due to the decoupling capacitor that allows the modeling of each power stage separately.
- Full-bridge converter model, formed by the line-to-line , is obtained. This consideration is given for a considered three-phase balanced system where the converter and its voltage sensors are naturally delta-connected.
4. Nonlinear Control Design Based on Input-Output Map Linearization
- To regulate the dc bus voltage for a given duty cycle, even with input voltage variations.
- To produce a low-harmonic distortion of the input current signal. In this case, the THD should be lower than 5%.
- To accomplish a near unity input power factor. For this task the current must track the input voltage .
- The current reference and its derivatives up to are bounded for all and is a piecewise continuous function of , and
- The signals are available online,
5. Modeling and Control for Three-Phase PWM Rectifier
6. Simulation Results
6.1. Performance with the Duty Class
6.2. Performance with Input Voltage Variations and Uncertainties
7. Discussion: Proposed Alternative Control Scheme vs. Traditional Control Scheme
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Energystorageexchange.org, DOE Global Energy Storage Database, Database. 2019, p. 1. Available online: https://energystorageexchange.org/projects/data_visualization (accessed on 10 February 2019).
- Gao, D.W. Energy Storage for Sustainable Microgrid, 1st ed.; Elsevier Ltd.: San Diego, CA, USA, 2015. [Google Scholar]
- Hou, R.; Nguyen, T.T.; Kim, H.M.; Song, H.; Qu, Y. An energy-based control strategy for battery energy storage systems: A case study on microgrid applications. Energies 2017, 10, 20. [Google Scholar] [CrossRef]
- Ma, Y.; Lin, H.; Wang, Z.; Ze, Z. Modified state-of-charge balancing control of modular multilevel converter with integrated battery energy storage system. Energies 2019, 12, 20. [Google Scholar] [CrossRef]
- Wang, E.; Huang, S. A Control Strategy of Three-Phase Voltage-Sourced PWM Rectifier. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; p. 5. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Z.; Member, S.; Zhang, Y.; Xie, W.; Piao, Z. Performance Improvement of Direct Power Control of PWM Rectifier with Simple Calculation. IEEE Trans. Power Electron. 2013, 28, 3428–3437. [Google Scholar] [CrossRef]
- Zhong, Y.; Chen, Y.; Chen, D. A Linearization Voltage Control Strategy of Three-phase PWM Rectifier. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 1846–1848. [Google Scholar]
- Zhi, Z.; Xueliang, L.; Chang, L.; Ming, J.; Lei, Y. Sliding Mode and Feedback Linearization Control of Three-Phase Voltage Source PWM Converter. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; pp. 8666–8670. [Google Scholar] [CrossRef]
- Yoon, S.J.; Lai, N.B.; Kim, K.H. A systematic controller design for a grid-connected inverter with LCL filter using a discrete-time integral state feedback control and state observer. Energies 2018, 11, 20. [Google Scholar] [CrossRef]
- Wessels, C.; Dannehl, J.; Fuchs, F.W. Active Damping of LCL-Filter Resonance Based on Virtual Resistor for PWM Rectifiers—Stability Analysis with Different Filter Parameters. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 3532–3538. [Google Scholar] [CrossRef]
- Wang, H.; Yu, C.; Zhang, J.; Cai, X. Control of Voltage Source Inverter with an LCL Filter without Voltage Sensors, Prz. Elektrotechniczny 2012, 2, 119–122. [Google Scholar]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- El Magri, A.; Giri, F.Ã.; Abouloifa, A.; Chaoui, F.Z. Robust control of synchronous motor through AC / DC / AC converters. Control Eng. Pract. 2010, 18, 540–553. [Google Scholar] [CrossRef]
- Zhang, Z.; Xin, Y.; Zhang, W. A Novel PWM Rectifier Control Technique for On-line UPS under Unbalanced Load Based on DSP. In Proceedings of the 2008 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; pp. 695–699. [Google Scholar] [CrossRef]
- Zhou, Z.; Wang, C.; Liu, Y.; Holland, P.M.; Igic, P. Load current observer based feed-forward DC bus voltage control for active rectifiers. Electr. Power Syst. Res. 2012, 84, 165–173. [Google Scholar] [CrossRef]
- Yin, Z.; Liu, J.; Zhong, Y. Study and Control of Three-Phase PWM Rectifier Based on Dual Single-Input Single-Output Model. IEEE Trans. Ind. Inform. 2013, 9, 1064–1073. [Google Scholar] [CrossRef]
- Sakda, S.; Panarit, S.; Viboon, C. Novel Control Technique of Single-Phase PWM Rectifier by Compensating Output Ripple Voltage. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 969–974. [Google Scholar] [CrossRef]
- Yusoff, N.A.; Razali, A.M.; Karim, K.A.; Rasin, Z.; Muhammad, M. The direct power control for three-phase of AC-DC converter under unbalace voltage condition. Int. J. Electr. Comput. Eng. 2018, 9, 5107–5114. [Google Scholar] [CrossRef]
- Gopalan, S. A comparative study of control techniques for three phase PWM rectifier. In Proceedings of the 2016 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Zarif, M.; Monfared, M. Step-by-step design and tuning of VOC control loops for grid connected rectifiers. Int. J. Electr. Power Energy Syst. 2015, 64, 708–713. [Google Scholar] [CrossRef]
- Suhura, E.M.; Nandakumar, M. Analysis of Hysteresis Current Control Techniques for Three Phase PWM Rectifiers. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Kozhikode, India, 19–20 February 2015; pp. 5–9. [Google Scholar] [CrossRef]
- Chen, T.C.; Ren, T.J.; Ou, J.C. Fixed switching frequency applied in single-phase boost AC to DC converter. Energy Convers. Manag. 2009, 50, 2659–2664. [Google Scholar] [CrossRef]
- Tahiri, F.E.; Chikh, K.; el Afia, A.; Lamterkati, J.; Khafallah, M. Simulation and experimental validation of VOC and hysteresis control strategies of unit power factor three-phase PWM rectifier. In Proceedings of the 2017 International Conference on Electrical and Information Technologies (ICEIT), Rabat, Morocco, 15–18 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Rahimi, M. Modeling, control and stability analysis of grid connected PMSG based wind turbine assisted with diode rectifier and boost converter. Int. J. Electr. Power Energy Syst. 2017, 93, 84–96. [Google Scholar] [CrossRef]
- Sierra, R.; Cárdenas, V.; Alcalá, J.; Visairo, N. Single-Phase Analysis of BTB Converter Under Unbalanced Voltage Conditions. In Proceedings of the 2011 8th International Conference on Electrical Engineering, Computing Science and Automatic Control, Merida, Mexico, 26–28 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Chakraborty, S.; Simoes, M.G.; Kramer, Q.E. (Eds.) Power Electronics for Renewable and Distributed; Springer: London, UK, 2013. [Google Scholar] [CrossRef]
- Visairo, N.; Nunez, C.; Lira, J.; Lazaro, I. Avoiding a Voltage Sag Detection Stage for a Single-Phase Multilevel Rectifier by Using Control Theory Considering Physical Limitations of the System. IEEE Trans. Power Electron. 2013, 28, 5244–5251. [Google Scholar] [CrossRef]
- Lira, J.; Cárdenas, V.; Núñez, C. Sag Compensation by the use of a PWM Rectifier Maintaining Harmonic Elimination and Power Factor Compensation Capacity. In International Conference on Electrical & Electronic Engineering; IEEE: Celaya, Mexico, 2004; pp. 567–572. [Google Scholar]
- Rahman, S.A.; Janakiraman, P.A.; Somasundaram, P. Voltage sag and swell mitigation based on modulated carrier PWM. Int. J. Electr. Power Energy Syst. 2015, 66, 78–85. [Google Scholar] [CrossRef]
- Eyer, J.; Corey, G. Energy Storage for the Electricity Grid: Benefits and Market Potential Assessment Guide: A Study for the DOE Energy Storage Systems Program; Tech Rep. SAND2010-0815; Sandia National Laboratories: Livermore, CA, USA, February 2010. [Google Scholar]
- Ponnaluri, S.; Linhofer, G.O.; Steinke, J.K.; Steimer, P.K. Comparison of Single and Two Stage Topologies for Interface of BESS or Fuel Cell System Using the ABB Standard Power Electronics Building Blocks. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; pp. 1–9. [Google Scholar] [CrossRef]
- Said-Romdhane, M.B.; Naouar, M.W.; Belkhodja, I.S.; Monmasson, E. An improved LCL filter design in order to ensure stability without damping and despite large grid impedance variations. Energies 2017, 10, 336. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- 1547-IEEE, Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces; IEEE: New York, NY, USA, 2018. [CrossRef]
- Plett, G.L. Battery Management Systems, 2nd ed.; Artech House: Nordwood, CO, USA, 2015. [Google Scholar]
- Diao, W.; Jiang, J.; Zhang, C.; Liang, H.; Pecht, M. Energy state of health estimation for battery packs based on the degradation and inconsistency. Energy Procedia 2017, 142, 3578–3583. [Google Scholar] [CrossRef]
- Du, J.; Liu, Z.; Wang, Y.; Wen, C. An adaptive sliding mode observer for lithium-ion battery state of charge and state of health estimation in electric vehicles. Control Eng. Pract. 2016, 54, 81–90. [Google Scholar] [CrossRef]
- Cano, J.M.; Jatskevich, J.; Norniella, J.G.; Davoudi, A.; Wang, X.; Martinez, J.A.; Mehrizi-Sani, A.; Saeedifard, M.; Aliprantis, D.C. Dynamic average-value modeling of direct power-controlled active front-end rectifiers. IEEE Trans. Power Deliv. 2014, 29, 2458–2466. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, J.; Lu, D.; Li, L. Multi-functional model predictive control with mutual influence elimination for three-phase AC/DC converters in energy conversion. Energies 2019, 12, 17. [Google Scholar] [CrossRef]
- Gui, Y.; Li, M.; Lu, J.; Golestan, S.; Guerrero, J.M.; Vasquez, J.C. A Voltage Modulated DPC Approach for Three-Phase PWM Rectifier. IEEE Trans. Ind. Electron. 2018, 65, 7612–7619. [Google Scholar] [CrossRef] [Green Version]
- Kahia, B.; Bouafia, A.; Chaoui, A.; Zhang, Z.; Abdelrahem, M.; Kennel, R. A direct power control strategy for three level neutral-point-clamped rectifier under unbalanced grid voltage. Electr. Power Syst. Res. 2018, 161, 103–113. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Yuan, L.; Lu, T.; He, F. Direct power control based on natural switching surface for three-phase PWM rectifiers. IEEE Trans. Power Electron. 2015, 30, 2918–2922. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, C. Direct Power Control of a Pulse Width Modulation Rectifier Using Space Vector Modulation Under Unbalanced Grid Voltages. IEEE Trans. Power Electron. 2015, 30, 5892–5901. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | ||||||||
|---|---|---|---|---|---|---|---|---|
| I | 0 | 1 | 0 | 1 | 1 | 1 | 0 | 0 |
| II | 0 | 1 | 1 | 0 | 0 | 1 | ||
| III | 1 | 0 | 0 | 1 | 1 | 0 | ||
| IV | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Parameter | Value |
|---|---|
| Grid voltage (ac: L–L, RMS) | 480 |
| Grid voltage regulation | ±10% |
| Rated power | 100 kW |
| Power factor | Near to unity |
| Output voltage (dc bus voltage) | 920 V (±3%) |
| THD of current () | <5% |
| THD of voltage () | <5% |
| dc bus capacitor | 6 mF |
| Duty class | 1.1 p.u. for 1 h, 1.25 p.u. for 2 min, and 1.5 p.u. for 10 s |
| Response time in transient load | <40 ms |
| 387 µH, 231.5 µH, 9.8 µF | |
| Parasitic resistances of | 1.9 mΩ, 2.6 mΩ, and 3.8 mΩ, respectively |
| Switching frequency (it is chosen as a prime number multiple of three to eliminate triplen harmonics) | 12,060 Hz |
| Battery model parameters (equivalent values for a vented lead-acid battery bank) | , , , ,, and |
| Parameterized gain values: ) | (5.1 × 10−2, 270 × 10−8, 8.93 × 10−12, 5.2) |
| Items/Control Scheme | Traditional Approach | Direct Power Control | Voltage Oriented Control | Hysteresis Current Control | Proposed Schemewith Input-Output Map Linearization |
|---|---|---|---|---|---|
| Park transformation | Required | Required/Not required (computing power stage) | Required | Not required | Not required |
| Internal current control loop (CCL) | Required | Required (two power loops) | Required (two power loops) | Hysteresis command | Required |
| Outer voltage control loop (VCL) | Required | Required | Required | Required | Not required (power balance is used instead) |
| Robustness | ✓ | ✓ | ✓ | ✓ | ✓ |
| Analysis complexity | Medium | Medium | Medium | Medium | High |
| Control law | PI (CCL) + PI (VCL) or PI (CCL) + PI (VCL) | PI | PI + PI | PI | Nonlinear control |
| Derivatives | None | None | None | None | 3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mora, D.; Núñez, C.; Visairo, N.; Segundo, J.; Camargo, E. Control for Three-Phase LCL-Filter PWM Rectifier with BESS-Oriented Application. Energies 2019, 12, 4093. https://doi.org/10.3390/en12214093
Mora D, Núñez C, Visairo N, Segundo J, Camargo E. Control for Three-Phase LCL-Filter PWM Rectifier with BESS-Oriented Application. Energies. 2019; 12(21):4093. https://doi.org/10.3390/en12214093
Chicago/Turabian StyleMora, Dante, Ciro Núñez, Nancy Visairo, Juan Segundo, and Eugenio Camargo. 2019. "Control for Three-Phase LCL-Filter PWM Rectifier with BESS-Oriented Application" Energies 12, no. 21: 4093. https://doi.org/10.3390/en12214093
APA StyleMora, D., Núñez, C., Visairo, N., Segundo, J., & Camargo, E. (2019). Control for Three-Phase LCL-Filter PWM Rectifier with BESS-Oriented Application. Energies, 12(21), 4093. https://doi.org/10.3390/en12214093