Providing Fault Ride-Through Capability of Turbo-Expander in a Thermal Power Plant



Abstract
:1. Introduction
- Presenting optimized topology for the DVR compensator;
- Performing comparative study between STATCM and the performance of DVR compensation strategies in a practical case study in terms of voltage stability and power quality issues under given fault conditions;
- Implementing FRT capability for the TE and supplying the ASS network considering other technical challenges; and
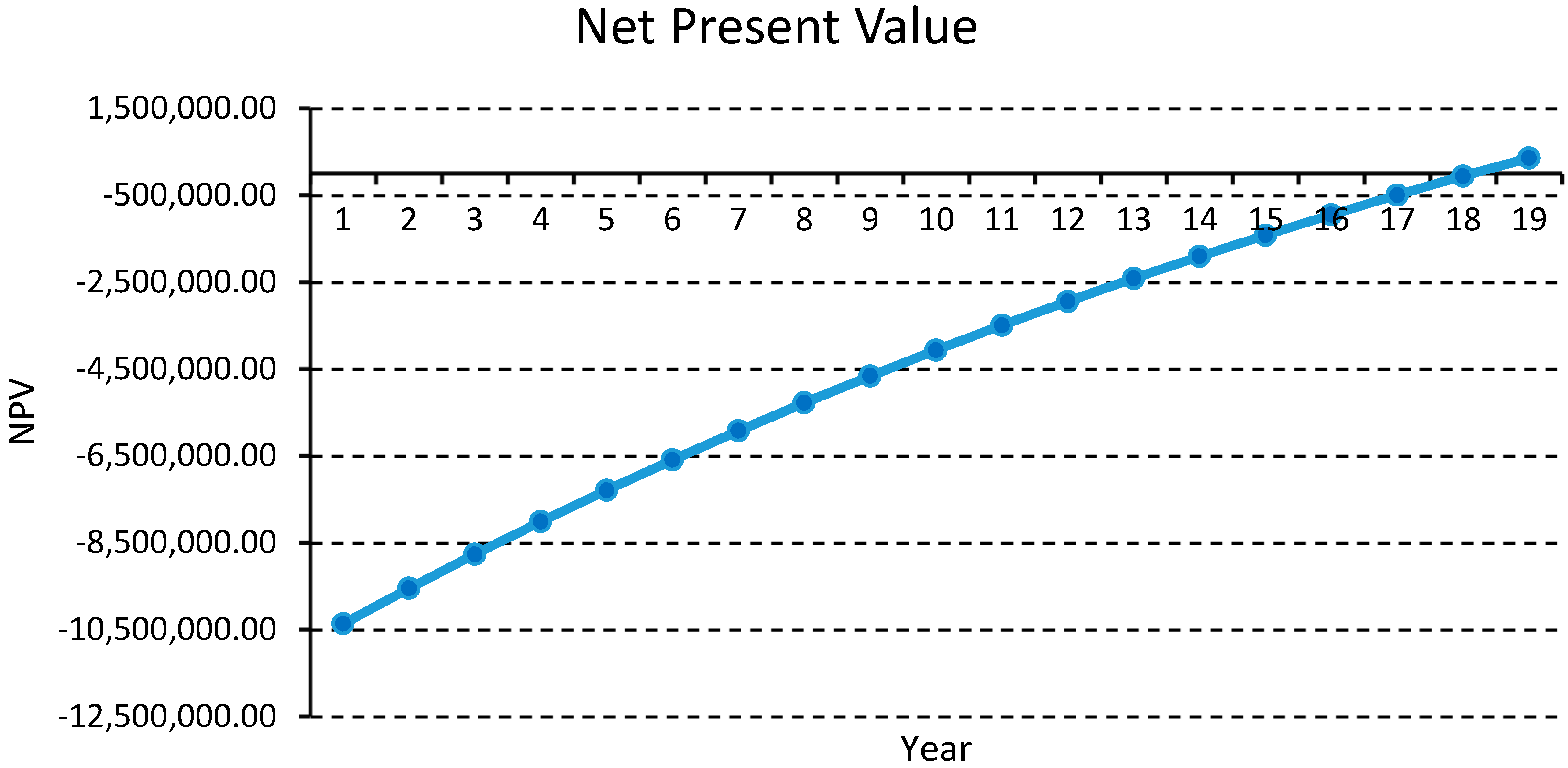
- Demonstrating the economic assessment of the project by the useful NPV method by taking into account technical considerations.
2. Dynamic Voltage Restorer
2.1. Dynamic Voltage Restorer Application
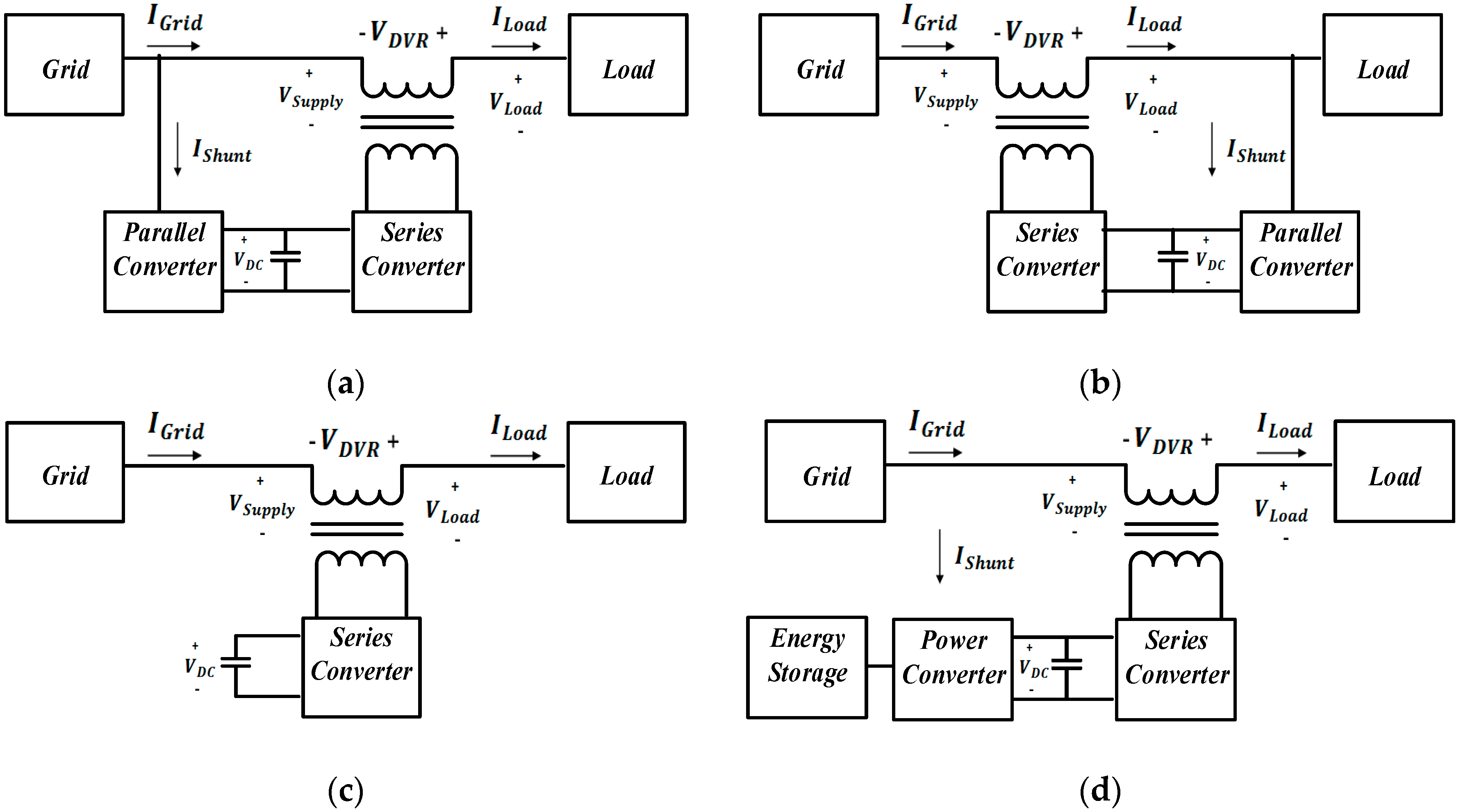
2.2. Dynamic Voltage Restorer Topologies
2.2.1. Topologies without Energy Storage
Supply-Side-Connected Shunt Converter
Load-Side-Connected Shunt Converter
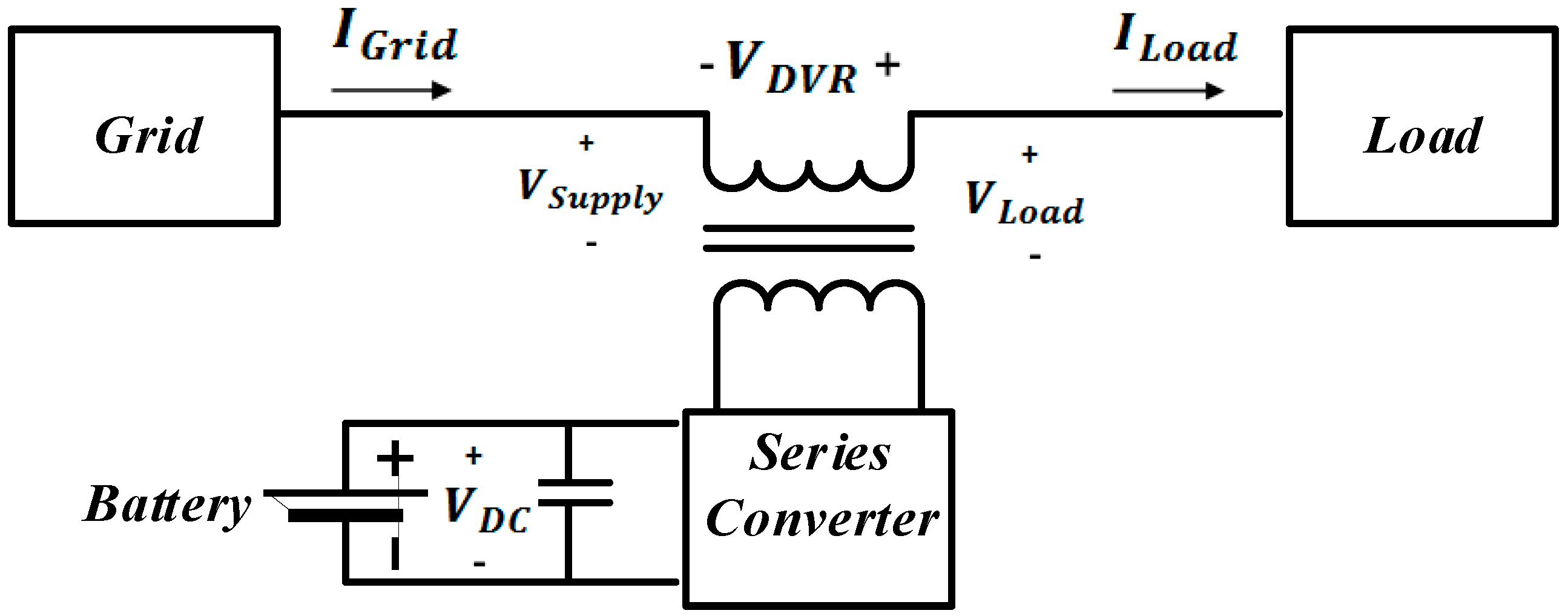
2.2.2. Energy Storage-Based Topology
Variable DC-Link Voltage
Constant DC-Link Voltage
2.2.3. Improved Topology of DVR
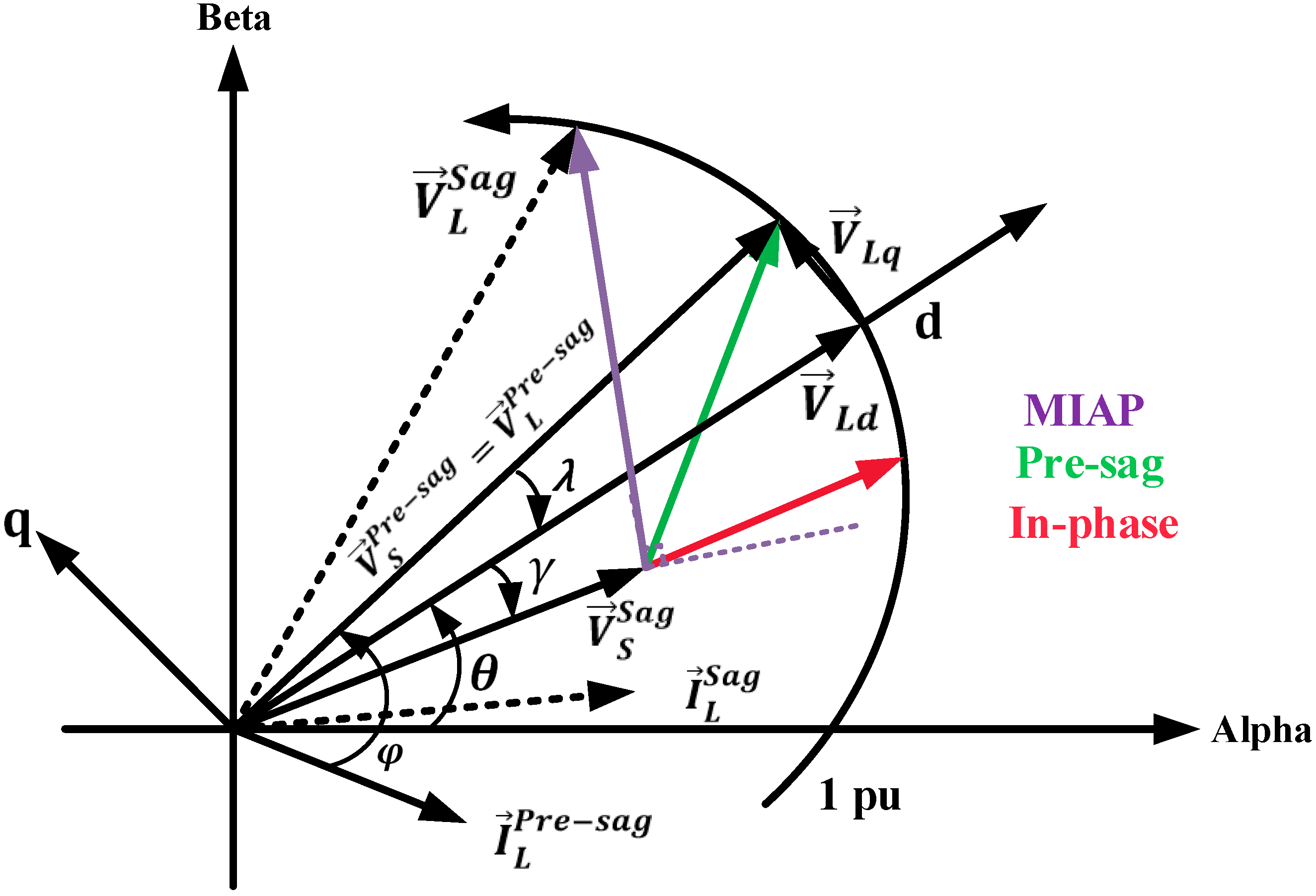
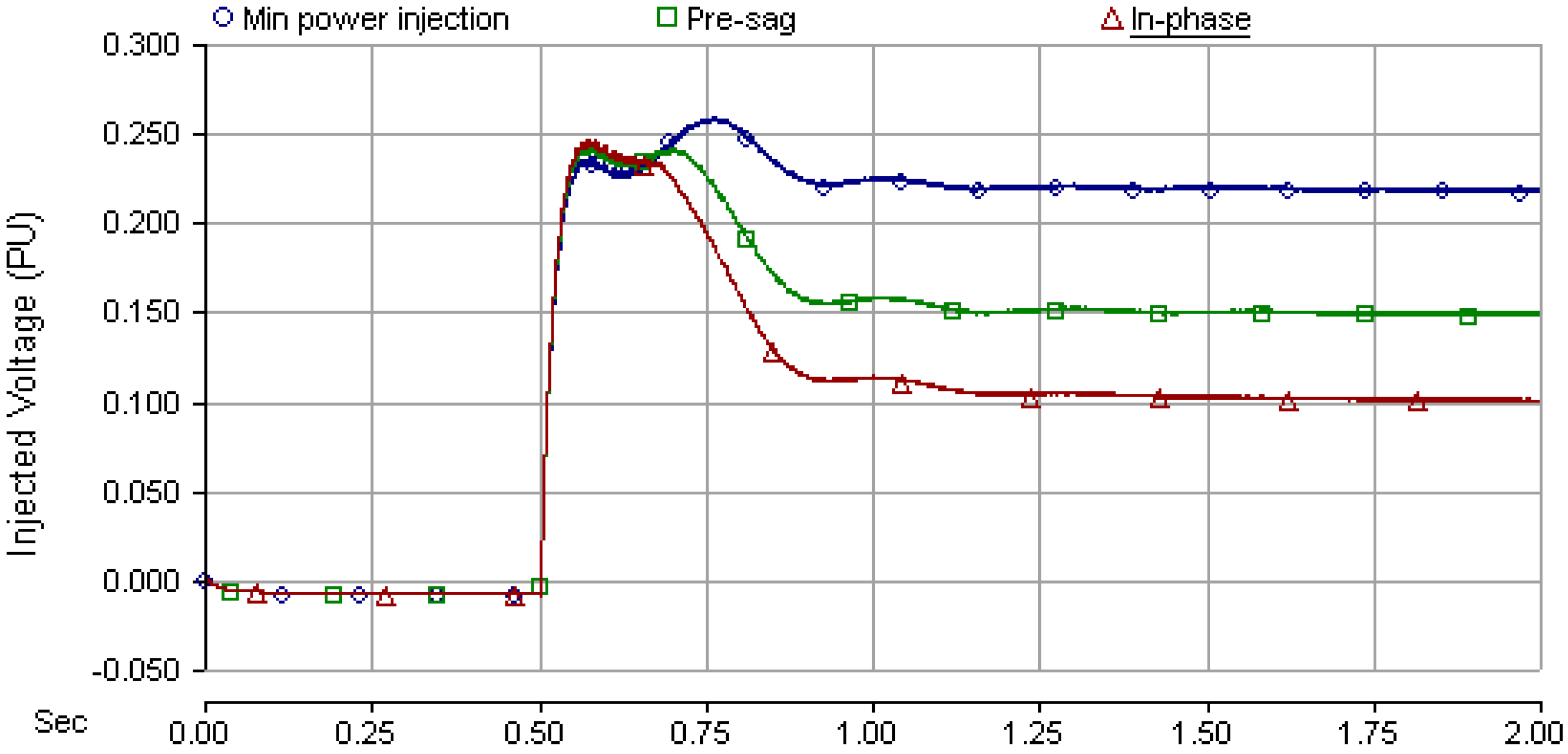
2.3. Dynamic Voltage Restorer Compensation Strategies
2.3.1. Pre-Sag Compensation Strategies
2.3.2. In-Phase
2.3.3. Minimum Injection Active Power (MIAP)
2.3.4. Combined Compensation Strategy
3. STATCOM
4. Simulation Results and Comparison
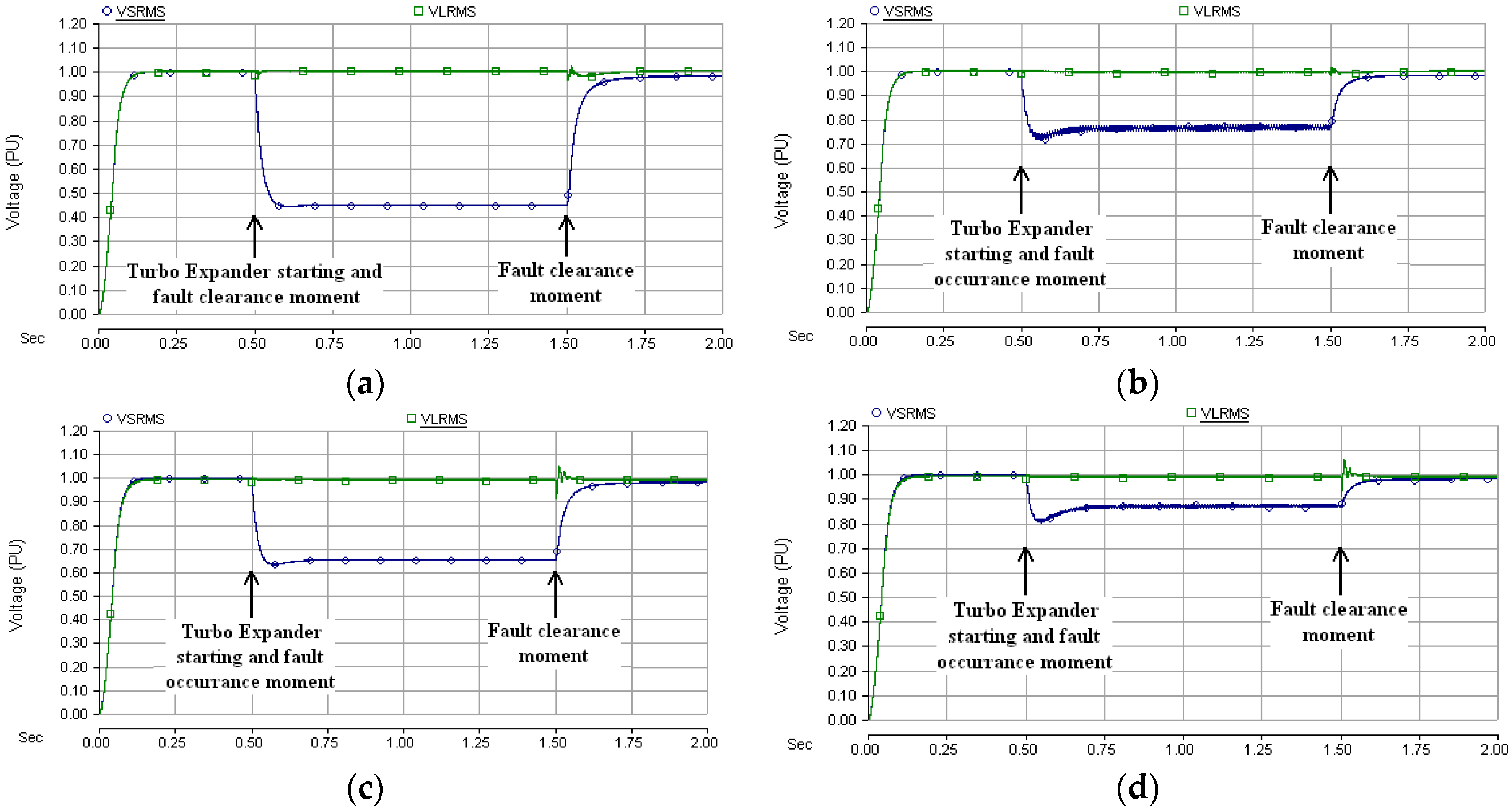
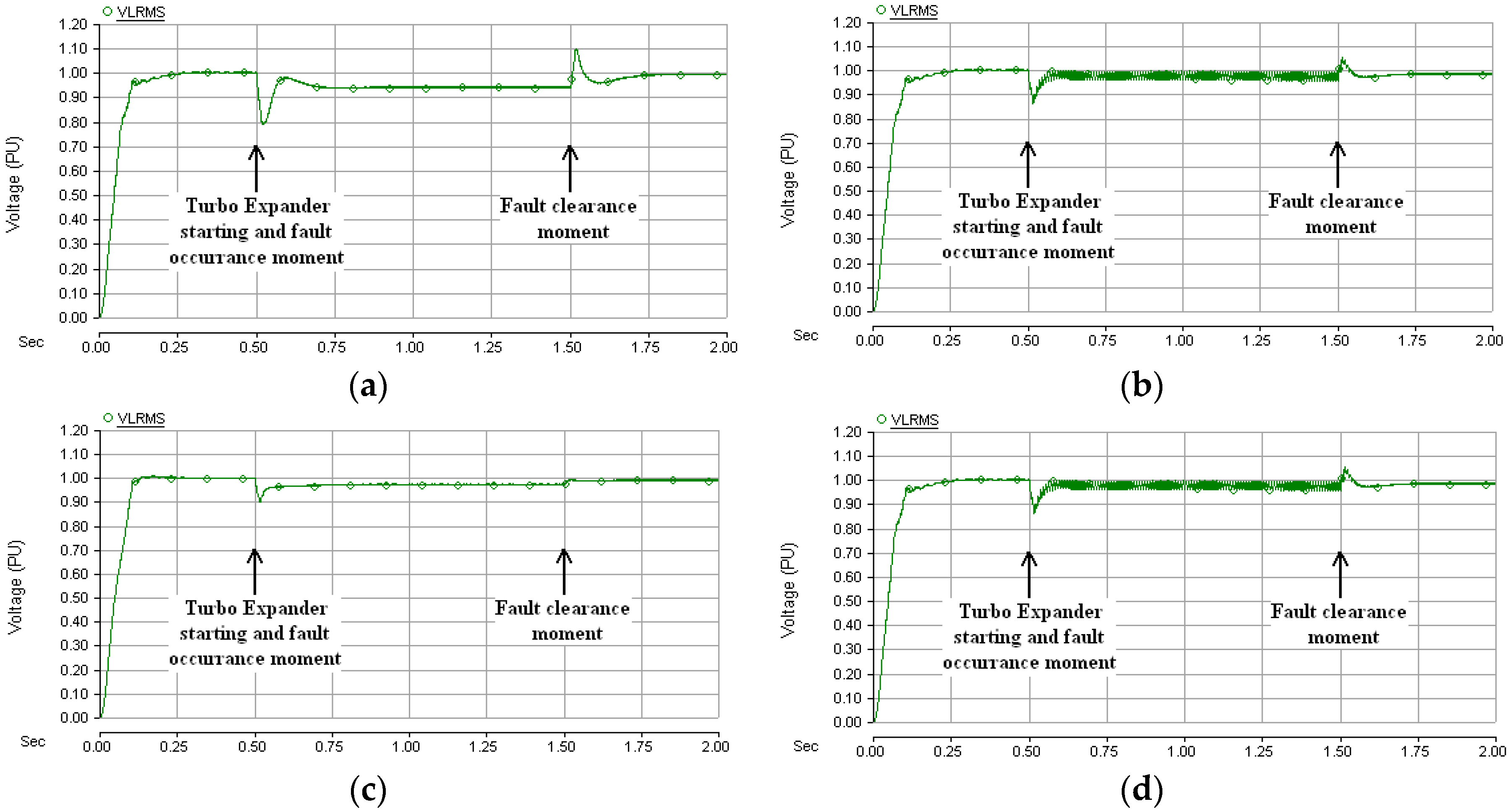
- Scenario 1: Turbo-expander start-up and occurrence of the balanced fault in transmission network (420 kV, 3-phase to ground) simultaneously;
- Scenario 2: Turbo-expander start-up and occurrence of the unbalanced fault in the transmission network (420 kV, 1-phase to ground) simultaneously;
- Scenario 3: Turbo-expander start-up and occurrence of the balanced fault in the ASS (21 kV, 3-phase to ground) simultaneously; and
- Scenario 4: Turbo-expander start-up and occurrence of the unbalanced fault in the ASS (21 kV, 1-phase to ground) simultaneously.
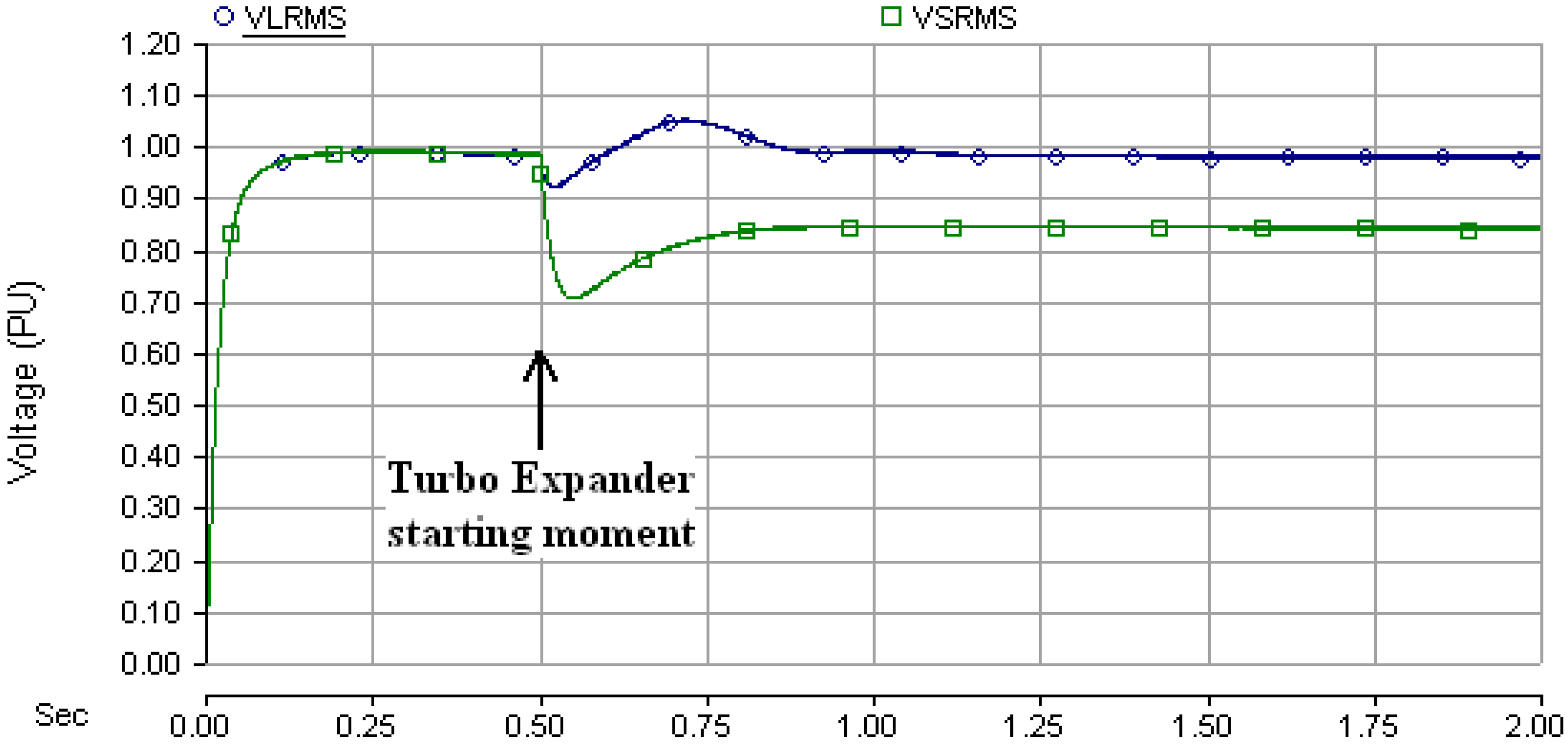
4.1. Dynamic Voltage Restorer Results
4.2. Static Synchronous Compensator Results
4.3. Comparison of Results
4.4. Technical and Economical Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Daneshi, H.; Khorashadi Zade, H.; Lotfjou Choobari, A. Turbo-expander as a distributed generators. In Proceedings of the IEEE Power and Energy Society General Meeting - Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–7. [Google Scholar]
- Taleshian Jelodar, M.; Rastegar, H.; Pichan, M. Turbo Expander System Behavior Improvement Using an Adaptive Fuzzy PID Controller. AUT J. Model. Simul. 2017, 49, 23–32. [Google Scholar]
- Babaaei Turkemani, M.; Rastegar, H. Modular modeling of turbo-expander driven generators for power system studies. IEEJ Trans. Electr. Electron. Eng. 2009, 4, 645–653. [Google Scholar] [CrossRef]
- Taleshian, M.; Rastegar, H.; Askarian Abyaneh, H. Modeling and power quality improvement of grid connected induction generators driven by turbo-expanders. Int. J. Energy Eng. 2012, 2, 131–137. [Google Scholar] [CrossRef]
- Norouzi, M.A.; Olamaei, J.; Norouzi, M.J. Improving voltage sag of turbo-expander starting in NEKA power plant by STATCOM. Int. J. Eng. Res. Technol. (IJERT) 2013, 2, 1721–1725. [Google Scholar]
- Norouzi, M.A.; Olamaei, J.; Gharehpetian, G.B. Compensation of voltage sag and flicker during thermal power plant turbo-expander operation by dynamic voltage restorer. Int. Trans. Electr. Energy Syst. 2016, 26, 16–31. [Google Scholar] [CrossRef]
- Shafiul Alam, M.D.; Yousef Abido, M.A. Fault ride-through capability enhancement of voltage source converter-high voltage direct current systems with bridge type fault current limiters. Energies 2017, 10, 1898. [Google Scholar] [CrossRef]
- Liu, S.; Bi, T.; Liu, Y. Theoretical analysis on the short-circuit current of inverter-interfaced renewable energy generators with fault-ride-through capability. Sustainability 2018, 10, 44. [Google Scholar] [CrossRef]
- Yan, L.; Chen, X.; Zhou, X.; Sun, H.; Jiang, L. Perturbation compensation-based non-linear adaptive control of ESS-DVR for the LVRT capability improvement of wind farms. IET Renew. Power Gener. 2018, 12, 1500–1507. [Google Scholar] [CrossRef]
- John Justo, J.; Mwasilu, F.; Jung, J. Doubly-fed induction generator based wind turbines: A comprehensive review of fault ride-through strategies. Renew. Sustain. Energy Rev. 2015, 45, 447–467. [Google Scholar] [CrossRef]
- Hong, L.; Jiang, Q.; Wang, L. A dynamic strategy to improve the ride-through capability of a fixed speed induction generator. Int. Trans. Electr. Energy Syst. 2018, 28. [Google Scholar] [CrossRef]
- Wang, L.; Kerrouche, K.D.E.; Mezouar, A.; Bossche, A.V.D.; Draou, A.; Boumediene, L. Feasibility study of wind farm grid-connected project in algeria under grid fault conditions using D-Facts devices. Appl. Sci. 2018, 8, 2250. [Google Scholar] [CrossRef]
- Yáñez-Campos, S.C.; Cerda-Villafaña, G.; Lozano-Garcia, J.M. Two-Feeder Dynamic Voltage Restorer for Application in Custom Power Parks. Energies 2019, 12, 3248. [Google Scholar] [CrossRef]
- Tien, D.V.; Gono, R.; Leonowicz, Z. A Multifunctional Dynamic Voltage Restorer for Power Quality Improvement. Energies 2018, 11, 1351. [Google Scholar] [CrossRef]
- Farhadi-Kangarlu, M.; Babaei, E.; Blaabjerg, F. A comprehensive review of dynamic voltage restorers. Int. J. Electr. Power Energy Syst. 2017, 92, 136–155. [Google Scholar] [CrossRef]
- Liao, H.; Milanović, J.V. On capability of different FACTS devices to mitigate a range of power quality phenomena. IET Gener. Transm. Distrib. 2017, 11, 1202–1211. [Google Scholar] [CrossRef] [Green Version]
- Godsk Nielsen, J.; Blaabjerg, F. A detailed comparison of system topologies for dynamic voltage restorers. IEEE Trans. Ind. 2005, 41, 1272–1280. [Google Scholar] [CrossRef]
- Jimichi, T.; Fujita, H.; Akagi, H. Design and experimentation of a dynamic voltage restorer capable of significantly reducing an energy-storage element. IEEE Trans. Ind. Appl. 2008, 44, 817–824. [Google Scholar] [CrossRef]
- Jowder, F.A.L. Design and analysis of dynamic voltage restorer for deep voltage sag and harmonic compensation. IET Gener. Transm. Distrib. 2009, 3, 547–560. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; Chen, Z.; Dai, G.; Yaqoob Javed, M.; Shao, C.; Zhan, H. Influence of DVR on Adjacent Load and Its Compensation Strategy Design Based on Externality Theory. Energies 2019, 12, 3716. [Google Scholar] [CrossRef]
- Nielsen, J.G.; Blaabjerg, F.; Mohan, N. Control strategies for dynamic voltage restorer compensating voltage sags with phase jumps. In Proceedings of the APEC 2001. Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No. 01CH37181), Anaheim, CA, USA, 4–8 March 2001; pp. 1267–1273. [Google Scholar]
- Chung, I.Y.; Won, D.G.; Park, S.Y.; Moon, S.I.; Park, J.K. The DC-link energy control method in dynamic voltage restorer system. Electr. Power Energy Syst. 2003, 25, 525–531. [Google Scholar] [CrossRef]
- Li, G.J.; Zhang, X.P.; Choi, S.H.; Lie, T.T.; Sun, Y.Z. Control strategy for dynamic voltage restorers to achieve minimum power injection without introducing sudden phase shift. IET Gener. Transm. Distrib. 2007, 1, 847–853. [Google Scholar] [CrossRef]
- Mallick, N.; Mukherjee, V. Self-tuned fuzzy-proportional–integral compensated zero/minimum active power algorithm based dynamic voltage restorer. IET Gener. Transm. Distrib. 2018, 12, 2778–2787. [Google Scholar] [CrossRef]
- Meyer, C.; De Doncker, R.W.; Li, Y.W.; Blaabjerg, F. Optimized control strategy for a medium-voltage DVR—Theoretical investigations and experimental results. IEEE Trans. Power Electron. 2008, 23, 2746–2754. [Google Scholar] [CrossRef]
- Rauf, A.M.; Khadkikar, V. An enhanced voltage sag compensation scheme for dynamic voltage restorer. IEEE Trans. Ind. Electron. 2015, 62, 2683–2692. [Google Scholar] [CrossRef]
- Amaris, H.; Alonso, M. Coordinated reactive power management in power networks with wind turbines and FACTS devices. Energy Convers. Manag. 2011, 52, 2575–2586. [Google Scholar] [CrossRef]
- Molinas, M.; Suul, J.A.; Undeland, T. Low voltage ride through of wind farms with cage generators: STATCOM versus SVC. IEEE Trans. Power Electron. 2008, 23, 104–1117. [Google Scholar] [CrossRef]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. A review of low-voltage ride-through enhancement methods for permanent magnet synchronous generator based wind turbines. Renew. Sustain. Energy Rev. 2015, 47, 399–415. [Google Scholar] [CrossRef]
- Arnold, T. How Net Present Value Is Implemented. In A Pragmatic Guide to Real Options; Palgrave Macmillan: New York, NY, USA, 2014; pp. 1–13. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No Stored Energy | Stored Energy | ||||
|---|---|---|---|---|---|
| Features | Supply-side-connected shunt converter | Load-side-connected shunt converter | Variable DC-link voltage | Constant DC-link voltage | Improved topology |
| Long voltage sags duration | + + | + + | - - | - | + + |
| Deep voltage sags | - - | + | - | + + | + + |
| Non-symmetrical voltage sags | - - | + | + + | + + | + + |
| DC-link voltage control | - - | + | - | + + | + + |
| Size of energy storage | + | - | + + | ||
| Grid effects | - - | - | + | + | + |
| Overall power rating of DVR converters | - | - - | + + | + | + + |
| System complexity | + | + | + + | - | + + |
| Cost estimation | + | - | + + | - - | + |
| Control complexity | + + | + | - | - | + |
| Sum (+) | 6 | 7 | 10 | 8 | 17 |
| Sum (-) | 9 | 4 | 5 | 6 | 0 |
| Sum (total) | −3 | 3 | 5 | 2 | 17 |
| Strategy | Pre-sag | In-phase | MIAP | Combined (Pre-sag with in-phase) | Combined (Pre-sag with MIAP) |
|---|---|---|---|---|---|
| Required stored energy | - - - | - - | + + + | - - | - |
| Phase compensation | + + + | - - - | + | + + | + + |
| Compensation time | + + | + + + | + | - | - - |
| Minimum injected/required active power | - - - | + + | + + + | - | + |
| Maximum injected/required reactive power | + + | - - - | + + + | + | + + |
| Sum (+) | 7 | 5 | 11 | 3 | 5 |
| Sum (-) | 6 | 8 | 0 | 4 | 3 |
| Sum (total) | 1 | −3 | 11 | −1 | 2 |
| Equipment | Details | Parameters |
|---|---|---|
| Equivalent left pump | Forced draught fan (F.D.FAN) | P = 4850 kW, PF = 0.9 |
| Condense boost main pump | P = 1600 kW, PF = 0.89 | |
| Boiler feed pump | P = 9000 kW, PF = 0.88 | |
| Circulating water pump (C.W.PUMP) | P = 1275 kW, PF = 0.9 | |
| Startup condensate pump | P = 460 kW, PF = 0.87 | |
| Equivalent right pump | Forced draught fan (F.D.FAN) | P = 4850 kW, PF = 0.86 |
| Condense boost main pump | P = 1600 kW, PF = 0.89 | |
| Boiler feed pump | P = 9000 kW, PF = 0.88 | |
| Circulating water pump (C.W.PUMP) | P = 1275 kW, PF = 0.9 | |
| Compressor | P = 200 kW, PF = 0.85 | |
| Generator | Steam power plant generator (unit1) | S = 517.647 MVA, number of poles = 2, P = 440 MW, V = 21 kV, f = 50 Hz, = 229.6% unsaturated, = 30.8% unsaturated, = 21.7% saturated |
| Transformer | T1 | S = 520 MVA, 21/420 kV |
| T2 | S = 60 MVA, 420/6.3 kV | |
| T3 | S = 40/20/20 MVA, 21/6.3 kV | |
| T4, T5, T6, T7 | S = 1250 kVA, 6.3/0.400 kV | |
| Lightning, cable losses and other loads | L1, L2 | 2 MW, 0.9 Mvar |
| Equipment | Details | Parameters |
|---|---|---|
| TE | RMS Phase current | I = 2.8 kA |
| Base angular frequency | Ω = 314 rad/s | |
| Number of poles | 4 | |
| Inertia J | 10 kg.m2 | |
| Starting reactive power | 63 MVAr | |
| DVR | Filter | Rf = 1.3 Ω, Cf = 160µF |
| DC-link capacitance | C = 330µF | |
| Injection Transformer | S = 15.5 MVA, f = 50 Hz, Ll = 0.08 p.u | |
| Dependent Source | Vb = 21 kV, f = 50 Hz, Rs = 0.09 Ω, L = 0.045 H | |
| STATCOM | Storage capacitor | C = 290 µF |
| PLL | Gp = 50, Gi = 50, V = 300 V | |
| Bus voltage | V = 21/420 kV | |
| Lead lag | k = 1, TLead = 0.0085 s, TLag = 0.0001 s | |
| PI controller | Ti = 0.13, ki = 1.157 |
| Scenario | Compensator | Location of Compensation | Fault Level | Sag | Swell | ||
|---|---|---|---|---|---|---|---|
| Amplitude (%) | Duration | Amplitude (%) | Duration | ||||
| 1 | Base case | --- | 420 KV/balance | 45 | 1 s | 0 | 0 |
| 2 | --- | 420 KV/unbalance | 18 | 1 s | 0 | 0 | |
| 3 | --- | 21 KV/balance | 27 | 1 s | 0 | 0 | |
| 4 | --- | 21 KV/unbalance | 9 | 1 s | 0 | 0 | |
| 5 | DVR | Point B | 420 KV/balance | 0 | 0 | 0 | 0 |
| 6 | Point B | 420 KV/unbalance | 0 | 0 | 0 | 0 | |
| 7 | Point B | 21 KV/balance | 0 | 0 | 0 | 0 | |
| 8 | Point B | 21 KV/unbalance | 0 | 0 | 0 | 0 | |
| 9 | STATCOM | Bus 3 | 420 KV/balance | 22 | 32.5 ms | 6.4 | 18.6 ms |
| 10 | Bus 3 | 420 KV/unbalance | 5 | 7.3 ms | 0 | 0 | |
| 11 | Bus 3 | 21 KV/balance | 8 | 23.3 ms | 0 | 0 | |
| 12 | Bus 3 | 21 KV/unbalance | 5 | 18.6 ms | 0 | 0 | |
| 13 | Bus 2 | 420 KV/balance | 12 | 46.5 ms | 0 | 0 | |
| 14 | Bus 2 | 420 KV/unbalance | 4 | 14.8 ms | 0 | 0 | |
| 15 | Bus 2 | 21 KV/balance | 0 | 0 | 0 | 0 | |
| 16 | Bus 2 | 21 KV/unbalance | 0 | 0 | 0 | 0 | |
| Spectrum Frequency Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| DVR (%) | 100 | 4.11 × 10−4 | 1.95 × 10−4 | 1.44 × 10−4 | 1.16 × 10−4 | 8.75 × 10−5 | 7.98 × 10−5 | 7.13 × 10−5 | 6.33 × 10−5 |
| STATCOM (%) | 100 | 1.2 × 10−1 | 4.6 × 10−1 | 2.95 × 10−1 | 3.24 × 10−1 | 7.4 × 10−1 | 4.2 × 10−1 | 8.3 × 10−2 | 6.3 × 10−2 |
| Compensators Features | DVR | STATCOM |
|---|---|---|
| TE start-up | + + | - |
| Input gas MFR fall | + | + + + |
| Generator’s fault ride-through (FRT) capability | + | + + + |
| Protecting the auxiliary service system under the fault condition | + + | - |
| Rating | + + | - - |
| Cost | + | - |
| Voltage transient | + | - |
| The harmonic content of injected voltage | + + | - - - |
| Sum (+) | 12 | 6 |
| Sum (-) | 0 | 9 |
| Sum (total) | 12 | −3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Norouzi, M.; Lehtonen, M. Providing Fault Ride-Through Capability of Turbo-Expander in a Thermal Power Plant. Energies 2019, 12, 4113. https://doi.org/10.3390/en12214113
Norouzi M, Lehtonen M. Providing Fault Ride-Through Capability of Turbo-Expander in a Thermal Power Plant. Energies. 2019; 12(21):4113. https://doi.org/10.3390/en12214113
Chicago/Turabian StyleNorouzi, Mohammadali, and Matti Lehtonen. 2019. "Providing Fault Ride-Through Capability of Turbo-Expander in a Thermal Power Plant" Energies 12, no. 21: 4113. https://doi.org/10.3390/en12214113
APA StyleNorouzi, M., & Lehtonen, M. (2019). Providing Fault Ride-Through Capability of Turbo-Expander in a Thermal Power Plant. Energies, 12(21), 4113. https://doi.org/10.3390/en12214113