Impact of Flexible AC Transmission System Devices on Automatic Generation Control with a Metaheuristic Based Fuzzy PID Controller




Abstract
:1. Introduction
- To recommend a teaching–learning-based optimization (TLBO)-based fuzzy PID controller for the AGC problem;
- To illustrate the superiority of the fuzzy PID controller with non-linearities such as the transport delay (TD), generation rate constraint (GRC), and governor dead band (GDB) for the AGC problem;
- To demonstrate the performance of various FACTS devices incorporated in the system;
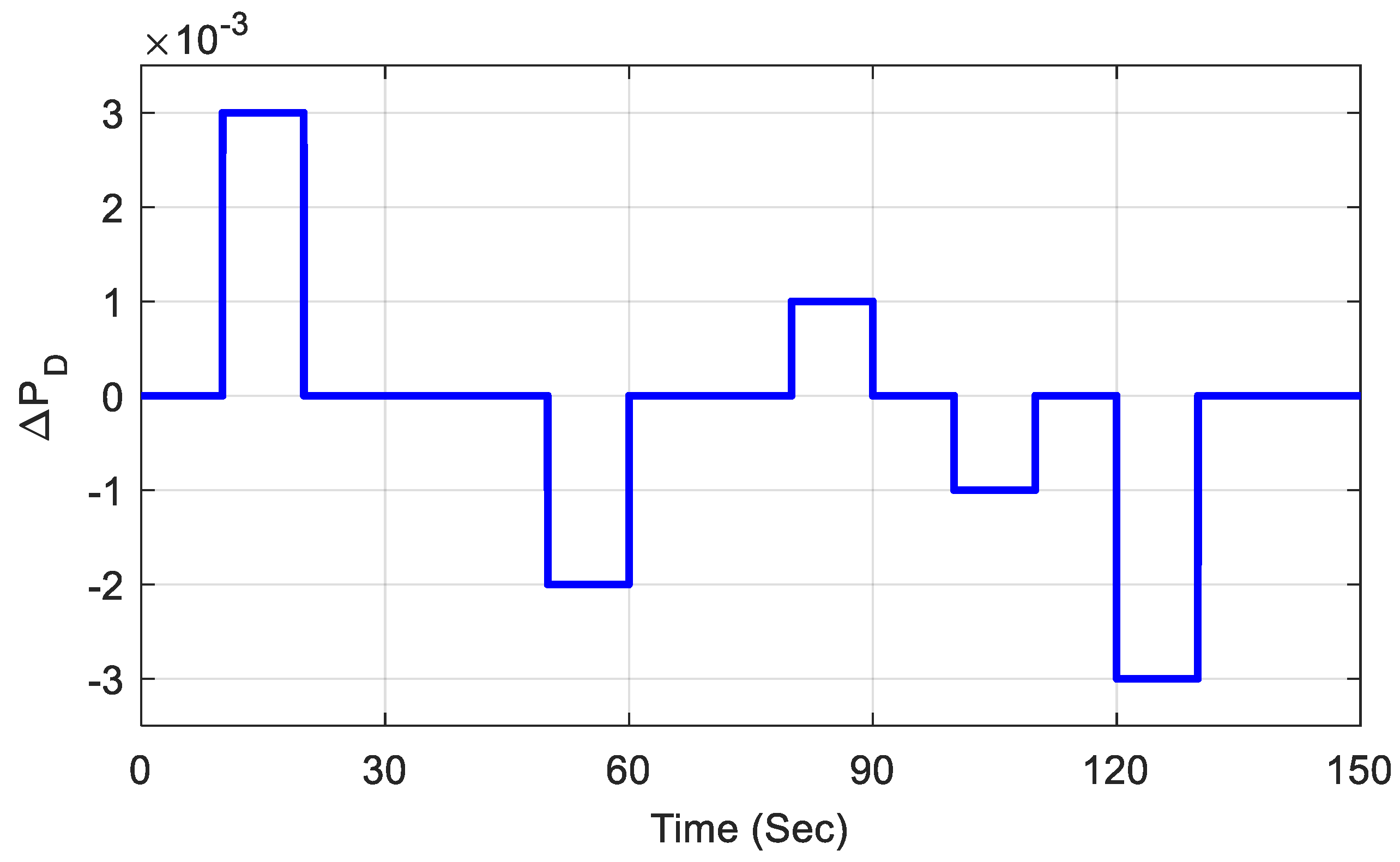
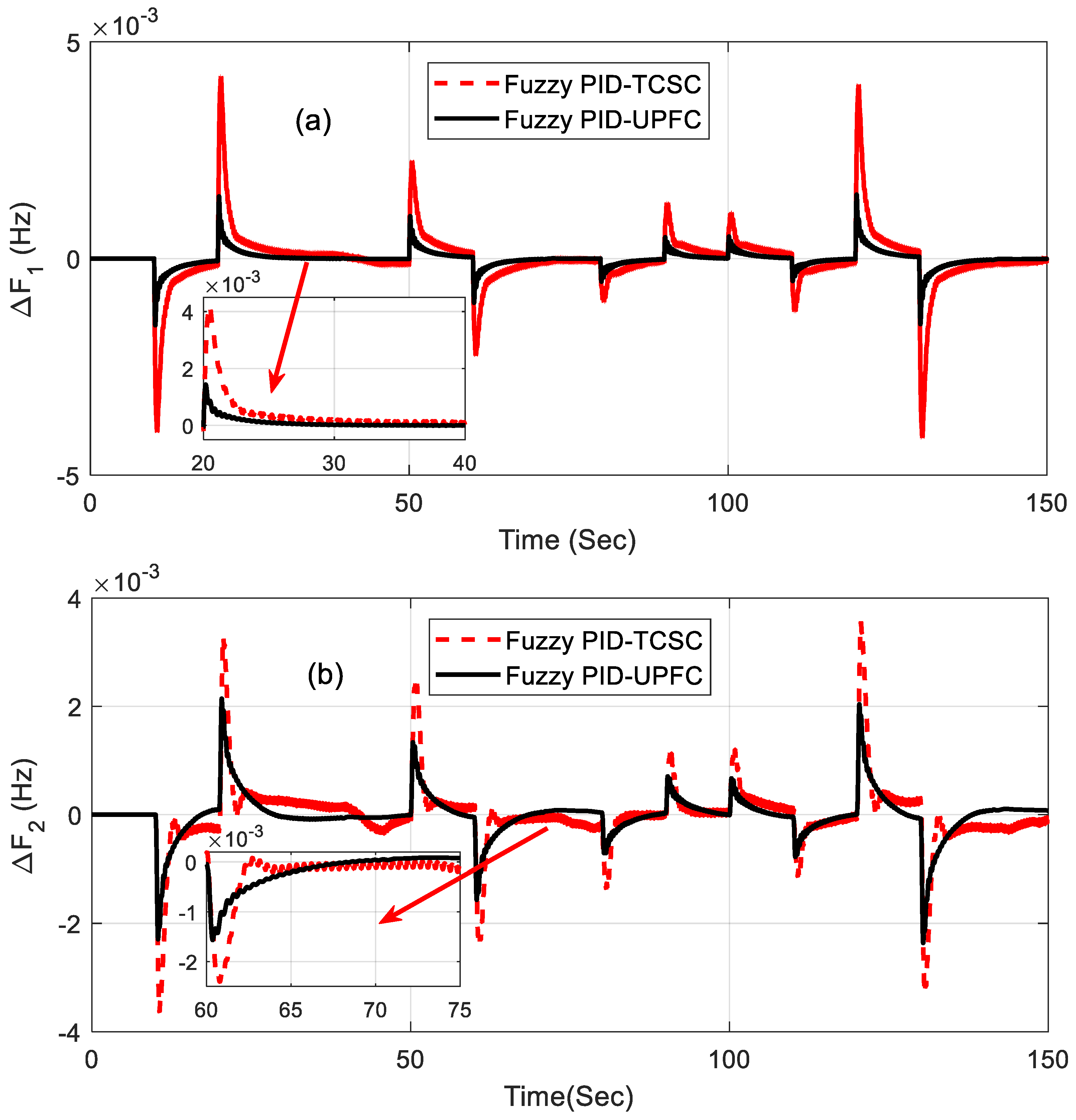
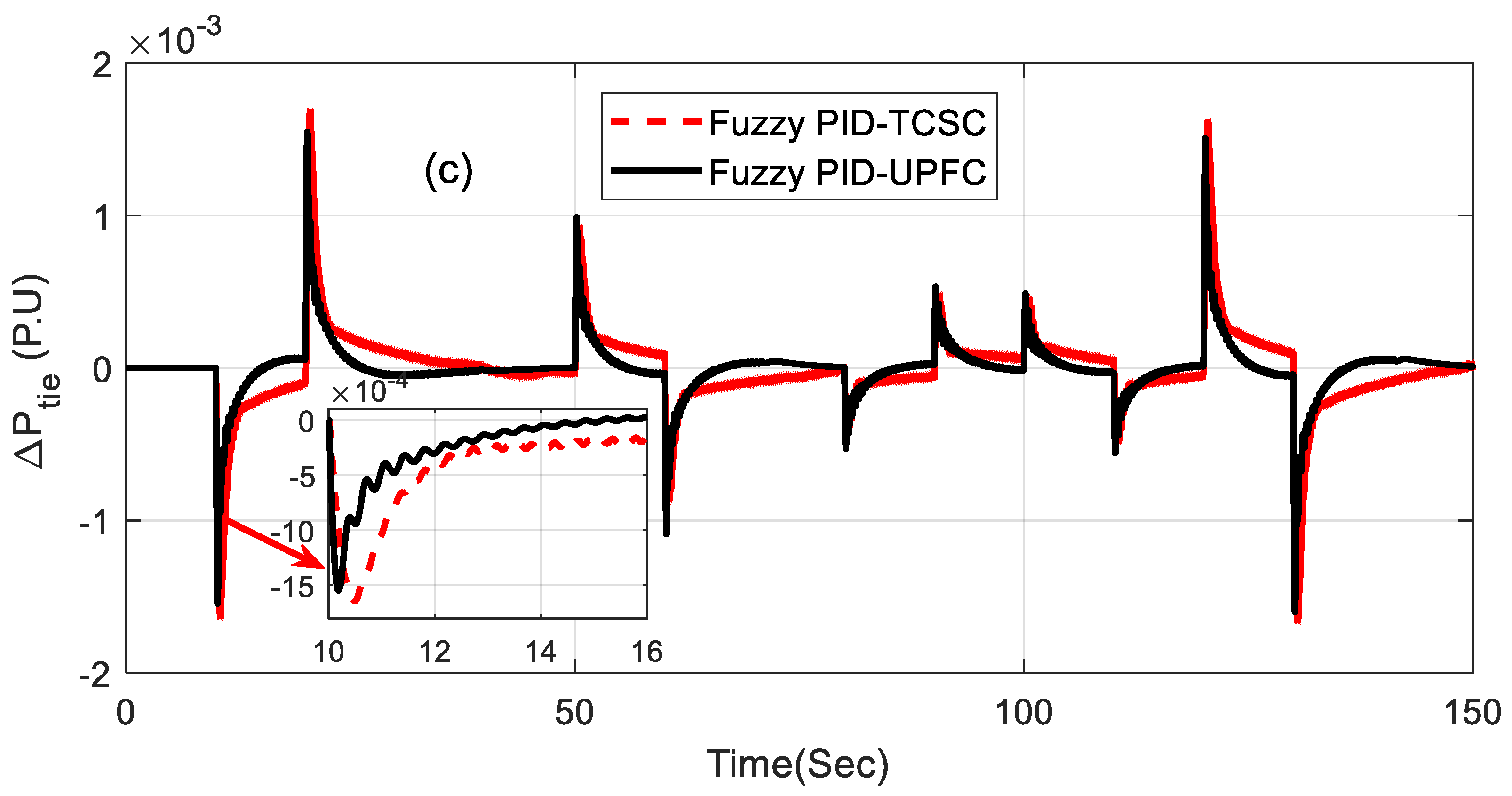
- To observe the effectiveness of the fuzzy PID plus unified power flow controller (UPFC) device for various disturbances such as step and random step load disturbances.
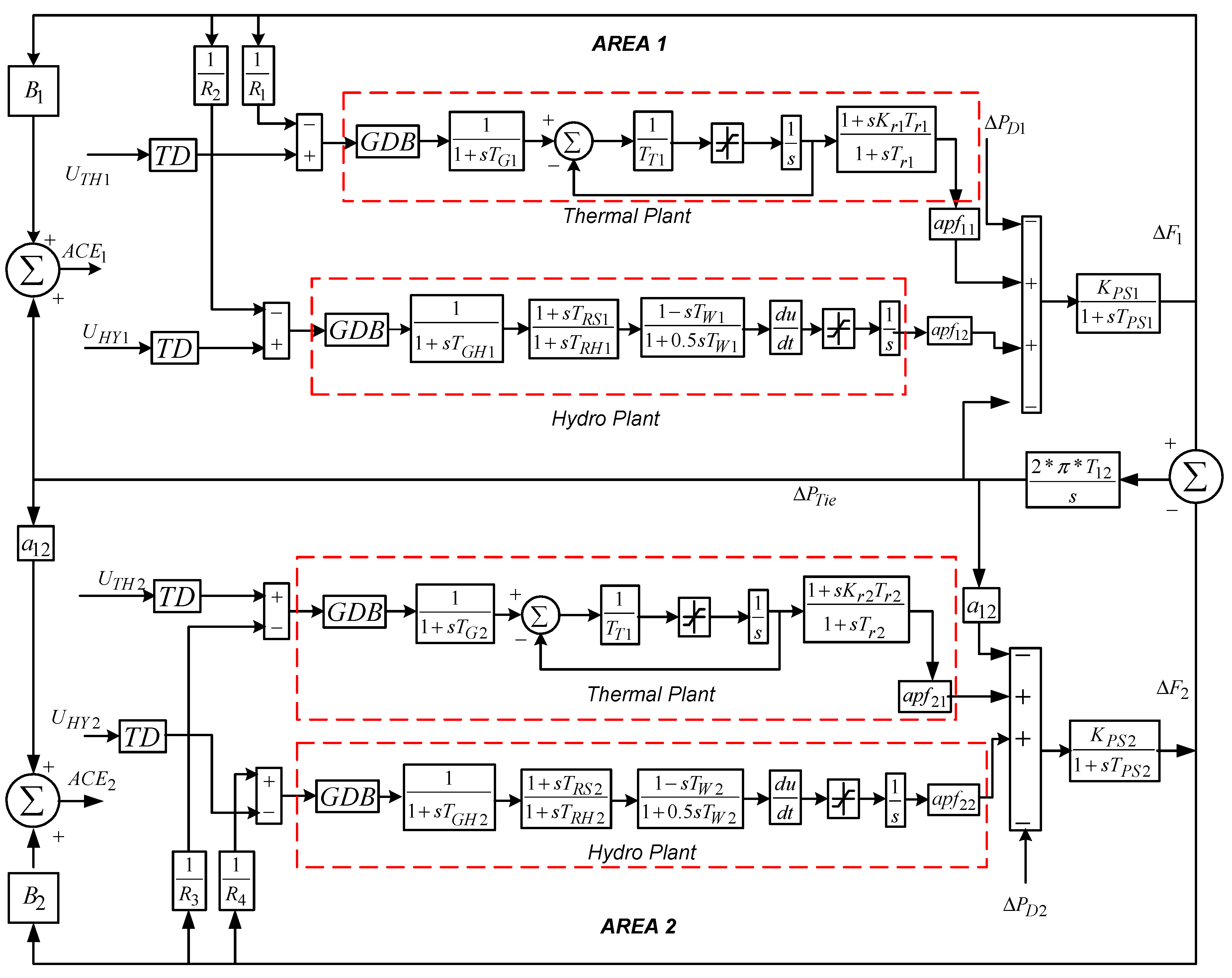
2. Materials and Methods
Control Structure
3. Teaching–Learning-Based Optimization (TLBO) Algorithm
3.1. Intilization
3.2. Teacher Phase
3.3. Learner Phase
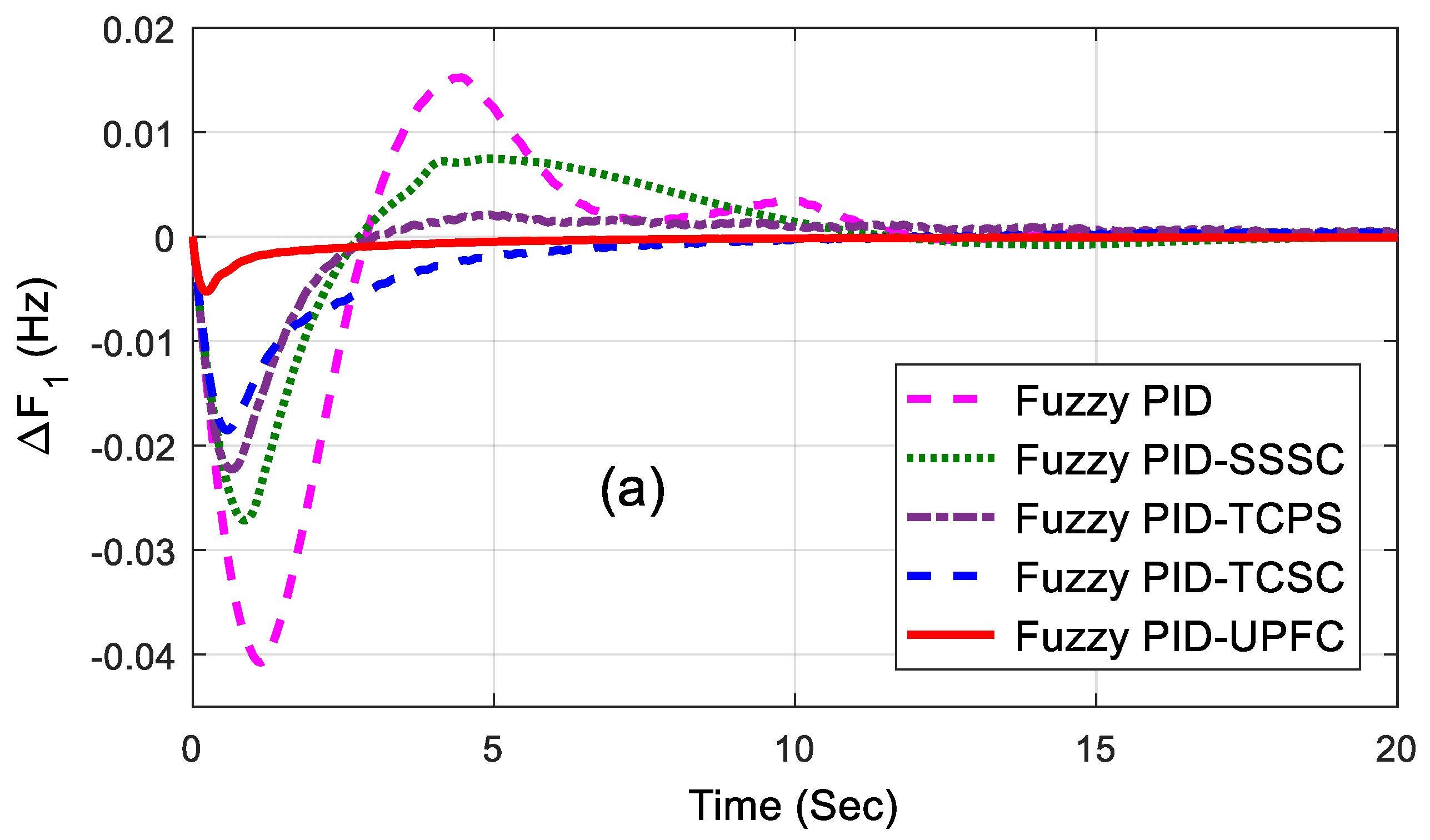
4. Results and Discussion
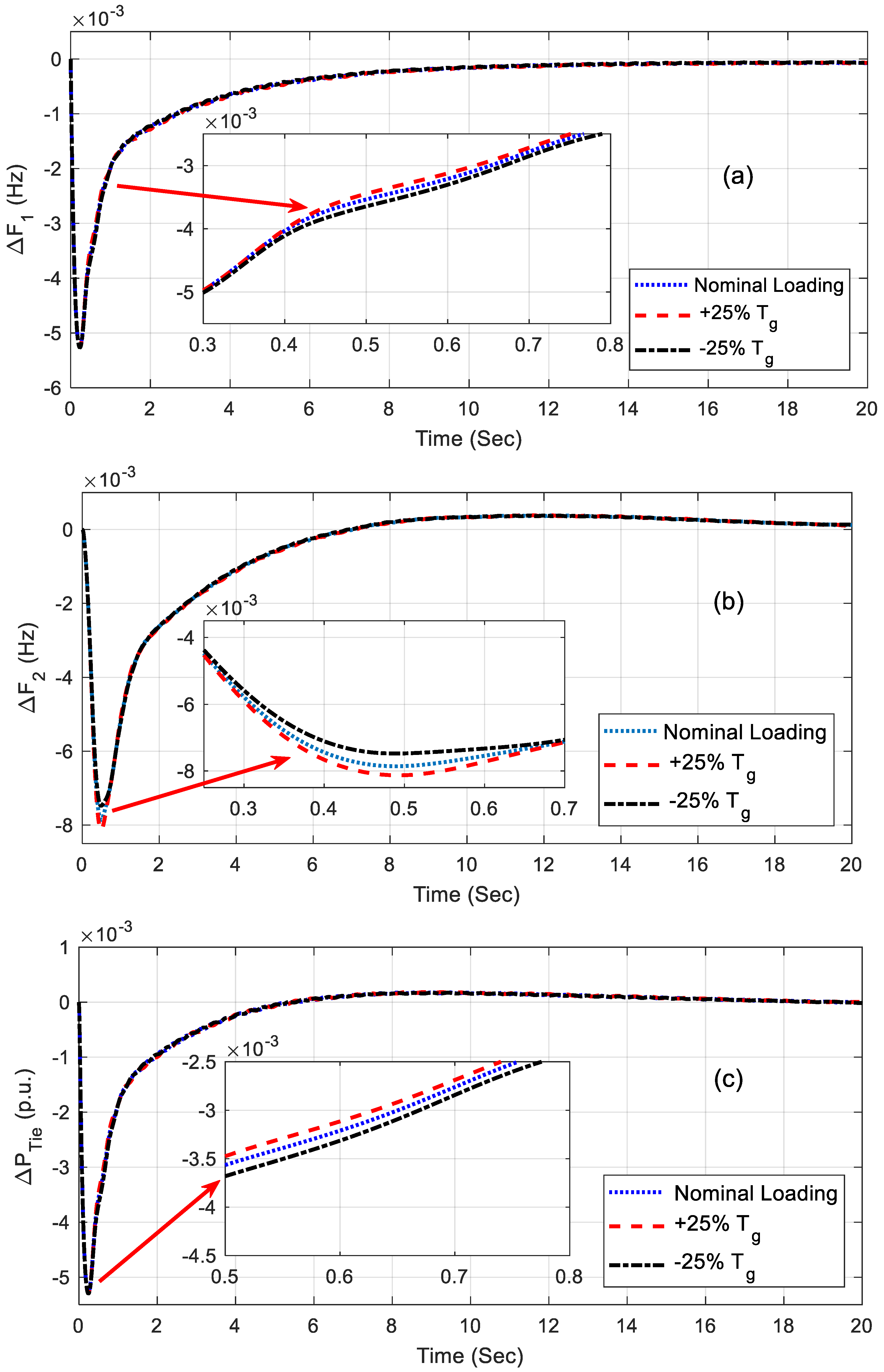
Robustness Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
| Nomenclature | Value | |
| i | Subscript referred to area i (1, 2) | |
| F | Nominal system frequency (Hz) | 60Hz |
| Rated power of area i (MW) | 2000 MW | |
| Incremental change in frequency of area i (Hz) | ||
| Incremental step load change of area i | ||
| Incremental change in tie-line power between areas 1 and 2 (p.u.) | ||
| Area control error of area i | ||
| Frequency bias parameter of area i (p.u. MW/Hz) | 0.425 | |
| Speed governor time constant for thermal unit of area i (s) | 0.08 | |
| Steam turbine time constant of area i (s) | 0.3 | |
| Power system time constant of area i (s) | 20 | |
| Power system gain of area i (Hz/p.u. MW) | 120 | |
| Synchronizing coefficient between areas 1 and 2 (p.u.) | 0.0113 | |
| Steam turbine reheat constant of area i | 0.5 | |
| R | Regulation parameter | 2.4 |
| Steam turbine reheat time constant of area i (s) | 10 | |
| Nominal starting time of water in penstock of area i (s) | 1 | |
| Hydro turbine speed governor reset time of area i (s) | 5 | |
| Hydro turbine speed governor transient droop time constant of area i (s) | 0.513 | |
| Hydro turbine speed governor main servo time constant of area i (s) | 48.7 | |
| Teaching feature | ||
| Simulation time (s) | 50 | |
| −1 | ||
| Area participation factor | 0.5 | |
Appendix A.1. Transfer Function Model and Data for SSSC

Appendix A.2. Transfer Function Model and Data for TCSC

Appendix A.3. Transfer Function Model and Data for TCPS

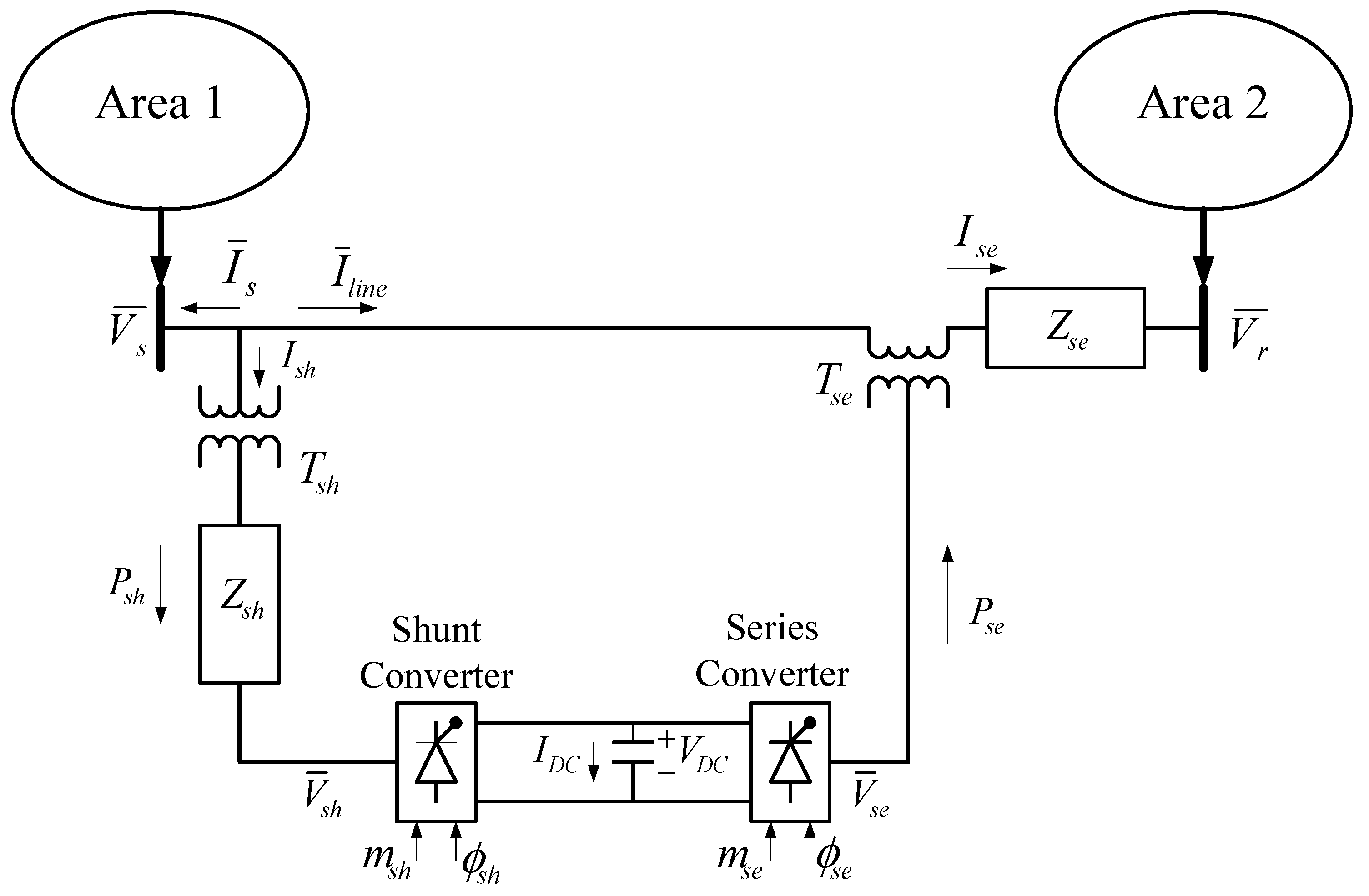
Appendix A.4. Transfer Function Model and Data for UPFC

References
- Elgerd, O.I. Electric Energy Systems Theory. An Introduction, 2nd ed.; Tata McGraw-Hill: New Delhi, India, 2007. [Google Scholar]
- Kasireddy, I.; Nasir, A.W.; Singh, A.K. IMC based controller design for automatic generation control of multi area power system via simplified decoupling. Int. J. Control Autom. Syst. 2018, 16, 994–1010. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control; Springer: New York, NY, USA, 2009. [Google Scholar]
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Shayeghi, H.; Shayanfar, H.A.; Jalili, A. Load frequency control strategies: A state-of-the art survey for the researcher. Int. J. Energy Convers. Manag. 2009, 50, 344–353. [Google Scholar] [CrossRef]
- Dev, A.; Sarkar, M.K. Robust higher order observer based non-linear super twisting load frequency control for multi area power systems via sliding mode. Int. J. Control Autom. Syst. 2019, 17, 1814–1825. [Google Scholar] [CrossRef]
- Rahmani, M.; Sadati, N. Two-level optimal load–frequency control for multi-area power systems. Int. J. Electr. Power Energy Syst. 2013, 53, 540–547. [Google Scholar] [CrossRef]
- Sonker, B.; Kumar, D. Dual loop IMC structure for load frequency control issue of multi-area multi-sources power systems. Int. J. Electr. Power Energy Syst. 2019, 112, 476–494. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Bornapour, M.; Gharaei, M.A. Grasshopper optimization algorithm for optimal load frequency control considering Predictive Functional Modified PID controller in restructured multi-resource multi-area power system with Redox Flow Battery units. Control Eng. Prac. 2019, 89, 204–227. [Google Scholar] [CrossRef]
- Lu, K.; Zhou, W.; Zeng, G.; Zheng, Y. Constrained population extremal optimization-based robust load frequency control of multi-area interconnected power system. Int. J. Electr. Power Energy Syst. 2019, 105, 249–271. [Google Scholar] [CrossRef]
- Liu, J.; Yao, Q.; Hu, Y. Model predictive control for load frequency of hybrid power system with wind power and thermal power. Energy 2019, 172, 555–565. [Google Scholar] [CrossRef]
- Min-Rong, C.; Guo-Qiang, Z.; Xiao-Qing, X. Population extremal optimization-based extended distributed model predictive load frequency control of multi-area interconnected power systems. J. Frankl. Inst. 2018, 355, 8266–8295. [Google Scholar]
- Yin, L.; Yu, T.; Yang, B.; Zhang, X. Adaptive deep dynamic programming for integrated frequency control of multi-area multi-microgrid systems. Neurocomputing 2019, 344, 49–60. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Application of backtracking search algorithm in load frequency control of multi-area interconnected power system. Ain Shams Eng. J. 2018, 9, 257–276. [Google Scholar] [CrossRef] [Green Version]
- Fathy, A.; Kassem, A.M. Antlion optimizer-ANFIS load frequency control for multi-interconnected plants comprising photovoltaic and wind turbine. ISA Trans. 2019, 87, 282–296. [Google Scholar] [CrossRef] [PubMed]
- Pradhan, C.; Bhende, C.N. Online load frequency control in wind integrated power systems using modified Jaya optimization. Eng. Appl. Artif. Intell. 2019, 77, 212–228. [Google Scholar] [CrossRef]
- Khadanga, R.K.; Kumar, A. Analysis of PID controller for the load frequency control of static synchronous series compensator and capacitive energy storage source-based multi-area multi-source interconnected power system with HVDC link. Int. J. Bio Inspired Comput. 2019, 13, 131–139. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Study of differential search algorithm based automatic generation control of an interconnected thermal-thermal system with governor dead-band. Appl. Soft Comput. 2017, 52, 160–175. [Google Scholar] [CrossRef]
- Chandrakala, K.R.M.V.; Balamurugan, S. Simulated annealing based optimal frequency and terminal voltage control of multi-source multi area system. Int. J. Electr. Power Energy Syst. 2016, 78, 823–829. [Google Scholar] [CrossRef]
- Ali, E.S.; Abd-Elazim, S.M. BFOA based design of PID controller for two area load frequency control with nonlinearities. Int. J. Electr. Power Energy Syst. 2013, 51, 224–231. [Google Scholar] [CrossRef]
- Shabani, H.; Vahidi, B.; Ebrahimpour, M. A robust PID controller based on imperialist competitive algorithm for load-frequency control of power systems. ISA Trans. 2013, 52, 88–95. [Google Scholar] [CrossRef]
- Jin, Z.; Chen, J.; Sheng, Y.; Liu, X. Neural network based adaptive fuzzy PID-type sliding mode attitude control for a reentry vehicle. Int. J. Control Autom. Syst. 2017, 15, 404–415. [Google Scholar] [CrossRef]
- Gheisarnejad, M. An effective hybrid harmony search and cuckoo optimization algorithm based fuzzy PID controller for load frequency control. Appl. Soft Comput. 2018, 65, 121–138. [Google Scholar] [CrossRef]
- Sahoo, B.P.; Panda, S. Improved grey wolf optimization technique for fuzzy aided PID controller design for power system frequency control. Sustain. Energy Grids Netw. 2018, 16, 278–299. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, T.K.; Nayak, J.R.; Panda, S.; Kar, S.K. A novel hybrid LUS–TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2016, 74, 58–69. [Google Scholar] [CrossRef]
- Khan, M.R.B.; Jagadeesh, P.; Jidin, R. Load frequency control for mini-hydropower system: A new approach based on self-tuning fuzzy proportional-derivative scheme. Sustain. Energy Tech. Assess. 2018, 30, 253–262. [Google Scholar]
- Rao, V.; Savsani, V.J.; Vakharia, D.P. Teaching-learning-based optimization: An optimization method for continuous non-linear large scale problems. Inf. Sci. 2012, 183, 1–15. [Google Scholar] [CrossRef]
- Esmaili, M.; Shayanfar, H.A.; Moslemi, R. Locating series FACTS devices for multi-objective congestion management improving voltage and transient stability. Eur. J. Oper. Res. 2014, 236, 763–773. [Google Scholar] [CrossRef]
- Singh, B.; Mukherjee, V.; Tiwari, P. A survey on impact assessment of DG and FACTS controllers in power systems. Renew. Sustain. Energy Rev. 2015, 42, 846–882. [Google Scholar] [CrossRef]
- Sang, Y.; Sahraei-Ardakani, M. Effective power flow control via distributed FACTS considering future uncertainties. Electr. Power Syst. Res. 2019, 168, 127–136. [Google Scholar] [CrossRef]
- Yu, S.; Chau, T.K.; Fernando, T.; Savkin, A.V.; Iu, H.H.-C. Novel quasi-decentralized SMC-based frequency and voltage stability enhancement strategies using valve position control and FACTS device. IEEE Access 2017, 5, 946–955. [Google Scholar] [CrossRef]
- Kavitha, K.; Neela, R. Optimal allocation of multi-type FACTS devices and its effect in enhancing system security using BBO, WIPSO & PSO. J. Electr. Syst. Inf. Technol. 2018, 5, 777–793. [Google Scholar]
- Dai, A.; Zhou, X.; Liu, X. Design and simulation of a genetically optimized fuzzy immune PID controller for a novel grain dryer. IEEE Access 2017, 5, 14981–14990. [Google Scholar] [CrossRef]
- Yesil, E.; Guzelkaya, M.; Eksin, I. Self-tuning fuzzy PID type load and frequency controller. Energy Convers. Manag. 2004, 45, 377–390. [Google Scholar] [CrossRef]
- Mudi, K.R.; Pal, R.N. A robust self-tuning scheme for PI-and PD-type fuzzy controllers. IEEE Trans. Fuzzy Syst. 1999, 7, 2–16. [Google Scholar] [CrossRef]
- Mudi, K.R.; Pal, R.N. A self-tuning fuzzy PI controller. Fuzzy Sets Syst. 2000, 115, 327–388. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Das, S.; Gupta, A. A novel fractional order fuzzy PID controller and its optimal time domain tuning based on integral performance indices. Eng. Appl. Artif. Intell. 2012, 25, 430–442. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller/Parameters | Fuzzy PID | Fuzzy PID-SSSC | Fuzzy PID-TCPS | Fuzzy PID-TCSC | Fuzzy PID-UPFC |
|---|---|---|---|---|---|
| K1 | 0.3069 | 0.3346 | 1.3115 | 1.3514 | 0.4029 |
| K2 | 0.7468 | 0.0995 | 0.8310 | 1.1099 | 0.1349 |
| KP1 | 1.2990 | 1.9143 | 0.4037 | 0.8476 | 1.4560 |
| KI1 | 0.8412 | 0.2396 | 0.2330 | 0.1426 | 1.2428 |
| KD1 | 1.1929 | 1.5844 | 0.4103 | 0.2324 | 0.2516 |
| K3 | 1.7536 | 0.5365 | 1.2096 | 0.7176 | 0.0003 |
| K4 | 0.8823 | 0.1064 | 0.2825 | 0.0254 | 1.2729 |
| KP2 | 0.6942 | 0.0756 | 1.8789 | 0.8073 | 0.4309 |
| KI2 | 0.4353 | 1.9600 | 0.5387 | 0.0420 | 0.6168 |
| KD2 | 0.0757 | 1.0155 | 0.3075 | 0.5739 | 0.0619 |
| Type of Controller | Ts (Sec) | Us (−ve) (Hz) | Us (−ve) (puMW) | |||
|---|---|---|---|---|---|---|
| ∆F1 | ∆F2 | ∆PTie | ∆F1 | ∆F2 | ∆PTie | |
| Fuzzy PID | 19.71 | 18.36 | 16.88 | 0.0408 | 0.014 | 0.0036 |
| Fuzzy PID-SSSC | 17.87 | 18.10 | 16.88 | 0.0271 | 0.006 | 0.0002 |
| Fuzzy PID-TCPS | 17.07 | 22.35 | 4.76 | 0.0222 | 0.015 | 0.0035 |
| Fuzzy PID-TCSC | 15.69 | 21.65 | 4.52 | 0.0077 | 0.037 | 0.0765 |
| Fuzzy PID-UPFC | 8.84 | 17.35 | 4.28 | 0.0053 | 0.007 | 0.0052 |
| Type of Controllers | Objective Functions (JS) | |||
|---|---|---|---|---|
| J1 = ISE | J2 = IAE | J3 = ITSE | J4 = ITAE | |
| Fuzzy PID | 0.0030 | 0.1901 | 0.0060 | 0.8506 |
| Fuzzy PID-SSSC | 0.0011 | 0.1297 | 0.0025 | 0.7814 |
| Fuzzy PID-TCPS | 0.0018 | 0.1500 | 0.0037 | 0.7040 |
| Fuzzy PID-TCSC | 0.0018 | 0.1266 | 0.0024 | 0.6194 |
| Fuzzy PID-UPFC | 9.0459 × 10−5 | 0.0377 | 1.0963 × 10−4 | 0.5600 |
| Fuzzy PID | Fuzzy PID- | Fuzzy PID- | Fuzzy PID- | Fuzzy PID- |
|---|---|---|---|---|
| SSSC | TCPS | TCSC | UPFC | |
| −0.0250 + 0.9207i | −33.3056 | −9.1524 | −47.4704 | −93.2746 |
| −0.0250 − 0.9207i | −5.015 | −0.4488 + 0.8518i | −2.1673 | −10.7105 |
| −0.0500 + 0.0000i | −4.408 | −0.4488 − 0.8518i | −0.4123 | −4.07 |
| −2 | −0.0280 + 0.9190i | −0.0500 | −0.05 | −0.0849 |
| −1.9493 | −0.0280 − 0.9190i | −2 | −2 | −2 |
| −0.0205 | −0.1001 | −1.9493 | −1.9493 | −1.9493 |
| −2 | −0.05 | −0.0205 | −0.0205 | −0.0205 |
| −1.9493 | −2 | −2 | −2 | −2 |
| −0.0205 | −1.9493 | −1.9493 | −1.9493 | −1.9493 |
| −0.1 | −0.0205 | −0.0205 | −0.0205 | −0.0205 |
| −3.3333 | −2 | −0.1 | −0.1 | −0.1 |
| −12.5 | −1.9493 | −3.3333 | −3.3333 | −3.3333 |
| −0.1 | −0.0205 | −12.5 | −12.5 | −12.5 |
| −3.3333 | −0.1 | −0.1 | −0.1 | −0.1 |
| −12.5 | −3.3333 | −3.3333 | −3.3333 | −3.3333 |
| −12.5 | −12.5 | −12.5 | −12.5 | |
| −0.1 | ||||
| −3.3333 | ||||
| −12.5 |
| Variation of Parameter | % Change | Settling Time Ts (s) | Obj | ||
|---|---|---|---|---|---|
| ∆F1 | ∆F2 | ∆PTie | ITAE | ||
| Nominal | 0 | 8.84 | 17.35 | 4.28 | 0.2433 |
| Loading condition | +25 | 8.84 | 17.34 | 4.28 | 0.2433 |
| −25 | 8.83 | 17.34 | 4.28 | 0.2434 | |
| Tg | +25 | 9.05 | 17.50 | 4.25 | 0.2465 |
| −25 | 8.47 | 17.50 | 4.25 | 0.2391 | |
| Tt | +25 | 8.23 | 16.24 | 4.11 | 0.2327 |
| −25 | 9.52 | 18.94 | 8.01 | 0.3089 | |
| T12 | +25 | 9.31 | 16.90 | 4.03 | 0.2394 |
| −25 | 7.90 | 17.96 | 4.34 | 0.2445 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pilla, R.; Azar, A.T.; Gorripotu, T.S. Impact of Flexible AC Transmission System Devices on Automatic Generation Control with a Metaheuristic Based Fuzzy PID Controller. Energies 2019, 12, 4193. https://doi.org/10.3390/en12214193
Pilla R, Azar AT, Gorripotu TS. Impact of Flexible AC Transmission System Devices on Automatic Generation Control with a Metaheuristic Based Fuzzy PID Controller. Energies. 2019; 12(21):4193. https://doi.org/10.3390/en12214193
Chicago/Turabian StylePilla, Ramana, Ahmad Taher Azar, and Tulasichandra Sekhar Gorripotu. 2019. "Impact of Flexible AC Transmission System Devices on Automatic Generation Control with a Metaheuristic Based Fuzzy PID Controller" Energies 12, no. 21: 4193. https://doi.org/10.3390/en12214193
APA StylePilla, R., Azar, A. T., & Gorripotu, T. S. (2019). Impact of Flexible AC Transmission System Devices on Automatic Generation Control with a Metaheuristic Based Fuzzy PID Controller. Energies, 12(21), 4193. https://doi.org/10.3390/en12214193