1. Introduction
One of the critical tasks of modern energy is the reliable supply of electricity to consumers in remote areas that include some critical loads (such as hospitals, radiation and nuclear installations, and heavy industry with environmental concerns) located very far from the central electric network. Currently, the main source of electricity for those remote areas is autonomous diesel generator sets (DGS), which have several disadvantages: Low operational life of diesel engines, the high operating cost of DGS due to the maintenance of generator, high consumption of fuel and lubricants, and environmental pollution. Besides, in combination with poorly developed transport infrastructure and severe changes in world climate, these drawbacks cause a high cost of electricity and low reliability of power supply to consumers. It is clear that the use of hybrid renewable energy systems (HRES) can significantly improve the reliability and economic and environmental efficiency of power supply systems for decentralized consumers [
1]. In general, a wide variety of energy sources can be used in HRES, but the alternative sources of energy like photovoltaic (PV) and wind energy (WT) are considered the most widely used for the off-grid area. Moreover, they have gained more attention because the energies of the Sun and wind are universally available. Besides, power plants based on them can be located as close as possible to the place of final energy consumption, which is especially important for autonomous energy.
The most complex modes from the point of view of power management, and at the same time the most efficient in terms of consumption of fuels and lubricants, operating costs, and environmental cleanliness are energy systems with a high penetration levels of renewable energy sources [
2]. A mandatory element of such energy systems is an energy storage device, which can, significantly, be implemented to increase the efficiency of a power plant by absorbing excess energy and delivering it to consumers during the lack of energy in the DC bus. Battery energy storage systems (BESS) should meet the requirements of HRES in terms of volume and time of energy storage, and these requirements are the most widely used for these systems [
3,
4]. It can be noted that a characteristic feature of the operating modes of HRES, especially with a high penetration of renewable sources, is the change in a wide range of values of generated and consumed power at different time intervals, which causes the presence of ripples in the charge–discharge currents of BESS. Moreover, it can lead to an increase in their temperature, boiling of the electrolyte, and corrosion of the electrodes [
5,
6]. In [
7], the results of experimental studies are presented to determine the service life of a lead-acid gel-type battery in charge–discharge modes with smoothed and pulsed currents are presented. Based on the result of the experiments, it was found that when the battery is operated in a pulsed mode, its guaranteed service life is reduced by almost two times. Similar results were obtained in [
8] for batteries manufactured under the Tesla trademark. In [
9], the results of studies demonstrated that one of the main causes of failure of lead-acid, nickel-cadmium, and lithium-ion batteries operating as part of HRES was charge–discharge modes by pulsed currents.
It can be observed that the high relevance of this problem is determined by the fact that BESS is the “weakest” link of HRES in terms of operational life. The guaranteed service life of most of the main HRES power equipment (WT, PV, DGS, power converters) claimed by their manufacturers is usually 15–20 years. The service life of BESS, as a rule, does not exceed five to 10 years, and only under the condition of their optimal operation. At the same time, financial costs for BESS make up a significant share of the total cost of the energy system. For instance, in [
10], it can be noted that the cost of BESS is 52% of the total reduced cost of a small PV station for one household in Indonesia. In the work [
11], results of researches on optimization of the structure of the equipment HRES including WT and PV, intended for power supply of objects with average power consumption, resulted in 5.6 kWh/day. Based on the results of the research, it can be noted that the cost of BESS is 38.58% of the total cost of the power plant. It is clear that one of the promising ways to improve the efficiency of HRES, widely discussed in recent years [
12,
13], is the use of hybrid energy storage systems (HESS) based on batteries and super capacitors. In order to achieve maximum efficiency of HRES and battery life, various HRES topologies are proposed [
14,
15], and new methods for monitoring and managing power consumption are developed [
16,
17], often using complex, intelligent algorithms [
18,
19]. It should be noted that the application of HESS eliminates high-frequency ripples in the charge–discharge currents of batteries, which positively affects their service life, but does not eliminate low-frequency power fluctuations, which is initiated in HRES with a high penetration levels of stochastic renewable energy sources can have a significant amplitude. Therefore, this leads to the fact that even when using HESS, batteries operate in constantly alternating modes of incomplete charge/discharge, which negatively affects their service life.
The selection of the optimal topology of HRES and the control system for the created energy system has been considered an important task, taking into account the specific field of its practical application. From the point of view of the basic architecture, two main approaches are considered for the construction of HRES: With the conjugation of generating sources on direct and alternating current [
20,
21,
22]. An unequivocal answer to the question of which architecture is better does not exist, however, each of the systems has its advantages and disadvantages, and, accordingly, a primary field of application. On the other hand, the monitoring and control system is crucial for achieving high levels of reliability and energy efficiency of HRES [
23,
24]. It can be observed that there are two main options for the structural organization of HRES control systems: Centralized and decentralized (distributed) [
21,
23,
25]. The high reliability of distributed control HRES has been considered one of its significant advantages since single-point faults are not critical. At the same time, the versatility of the system is significantly increased, which makes it relatively easy to make changes to its configuration and replace faulty equipment. From the analysis of well-known HRES topologies and control systems, it can be noted that power systems with a high level of substitution HRES with architecture based on direct current, the distributed control system, and battery-powered energy storage systems of energy storage are mainly applied [
23,
24]. In order to distribute the load between the generating sources, an adaptive droop control strategy can be used [
24,
26]. The merits of this technical solution are a sufficiently high reliability of the energy system, high speed, and a good level of unification. On the other hand, this solution has several drawbacks, the most significant of which are the need for converters with agreed technical characteristics, the high complexity and cost of converting equipment, and the inefficient use of the potential of primary renewable energy. It should be noted that the latter drawback is especially critical for energy systems geographically located in areas with severe climatic conditions. This drawback is due to the fact that in the standard HRES construction scheme, the power balance in the system is controlled by limiting the output electric power of Renewable Energy Sources (RES) installations, and in systems with a high penetration of renewable sources, irretrievable energy losses will be very significant. Generally, the experience of operating HRES in areas with severe climatic conditions indicates that most of the generated energy is spent on the life support system of the power plant: Heating of the container, process equipment, etc. [
27].
The main contribution of this paper is to propose technical solutions to increase the reliability and efficiency of HRES with high penetration levels of renewable stochastic sources. Based on the obtained results in this work, it can be noted that a new, original method of construction and an algorithm for controlling HRES modes are proposed, which increases its reliability and energy efficiency. Moreover, it can be observed that in the proposed HRES construction scheme, excess energy generated by RES installations is dissipated at ballast resistances, which makes it useful to use it for various household needs: Heating water, heating, etc.
The rest of this paper is organized in the following manner.
Section 2 elaborates a description of the proposed topology and method of control modes of HRES.
Section 3 describes the object and methods of research. The obtained resulted of modeling the HRES operating modes are discussed in
Section 4. In the Conclusion, the research findings are recapitulated.
2. Description of the Proposed Architecture of Construction and Method of Control Modes of Hybrid Energy Systems
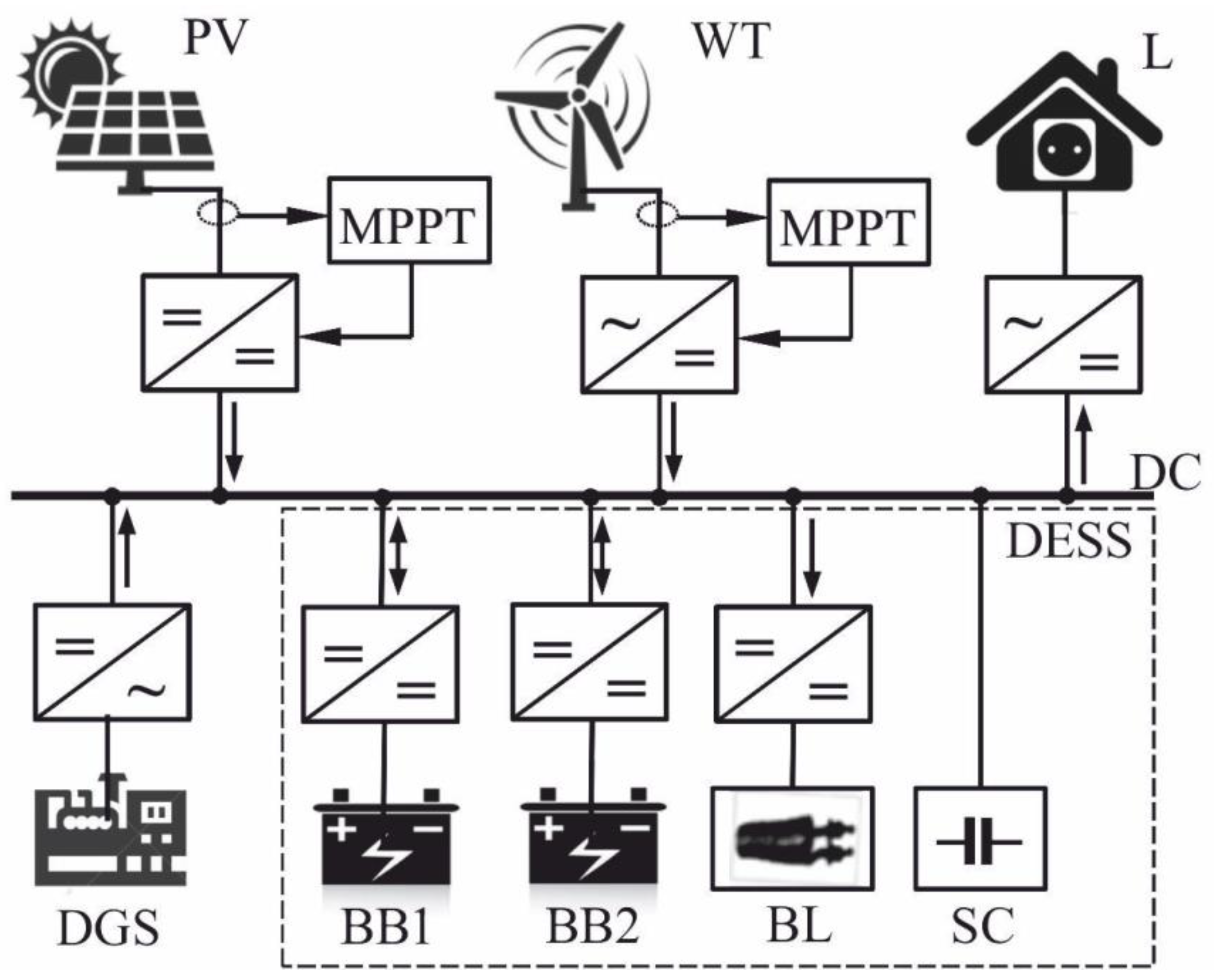
This work introduces a new technical solution that can provide the most efficient use of the RES potential and the optimization of the charge/discharge modes of BESS. The idea of the proposed solution is to use a passive voltage stabilization system on the DC bus bar by connecting a super capacitor (SC) to it and controlling the energy balance in the system using a dual-circuit energy storage system (DESS). The DESS comprises of two identical rechargeable battery bank (BB), alternately operating in charge/discharge mode, an adjustable ballast load (BL), and SC [
28]. The proposed generalized HRES construction scheme is presented in
Figure 1.
One of the main components of HRES with this construction method is a DC bus, which has the function of collecting and distributing electrical energy in a closed energy system.
The power balance equation for a DC bus is demonstrated by the following equation:
Generally, the power balance on the bus is determined by the current ratio of generated and consumed power. From
Figure 1, it can be visualized that the possible generation sources and load power that can be used in the HESS are: Diesel generator sets (
), wind power (
) and photovoltaic installations (
), as well as discharge power BB (
). Power consumers are: Consumer payload (
), ballast load (
), and charging power BB (
).
Considering Equation (1), one may notice that, the uncontrolled variable is the amount of power consumed by the payload .
In order to achieve an optimal power transfer, from the generator to load, it is imperative to maintain both the PV and wind generators and the load at their respective optimum operating conditions (i.e., maximum power point tracking (MPPT) operations) [
29,
30]. Therefore, it should be observed that for ensuring the energy balance in the system, the amount of power generated
and
are considered unmanaged variables. To control the power balance and stabilize the DC bus voltage, the proposed control strategy involves the use of two main controlled power sources:
and a battery operating in the
discharge mode. Taking into account the fact that in HRES with a high penetration of renewable energy sources, modes are possible in which the amount of power generated by RES installations can significantly exceed the power consumption, the ballast load
is used as an additional controlled power consumer in the system. In addition, the second BB connected to the bus in the charging power take-off mode that can be considered as a partially controlled
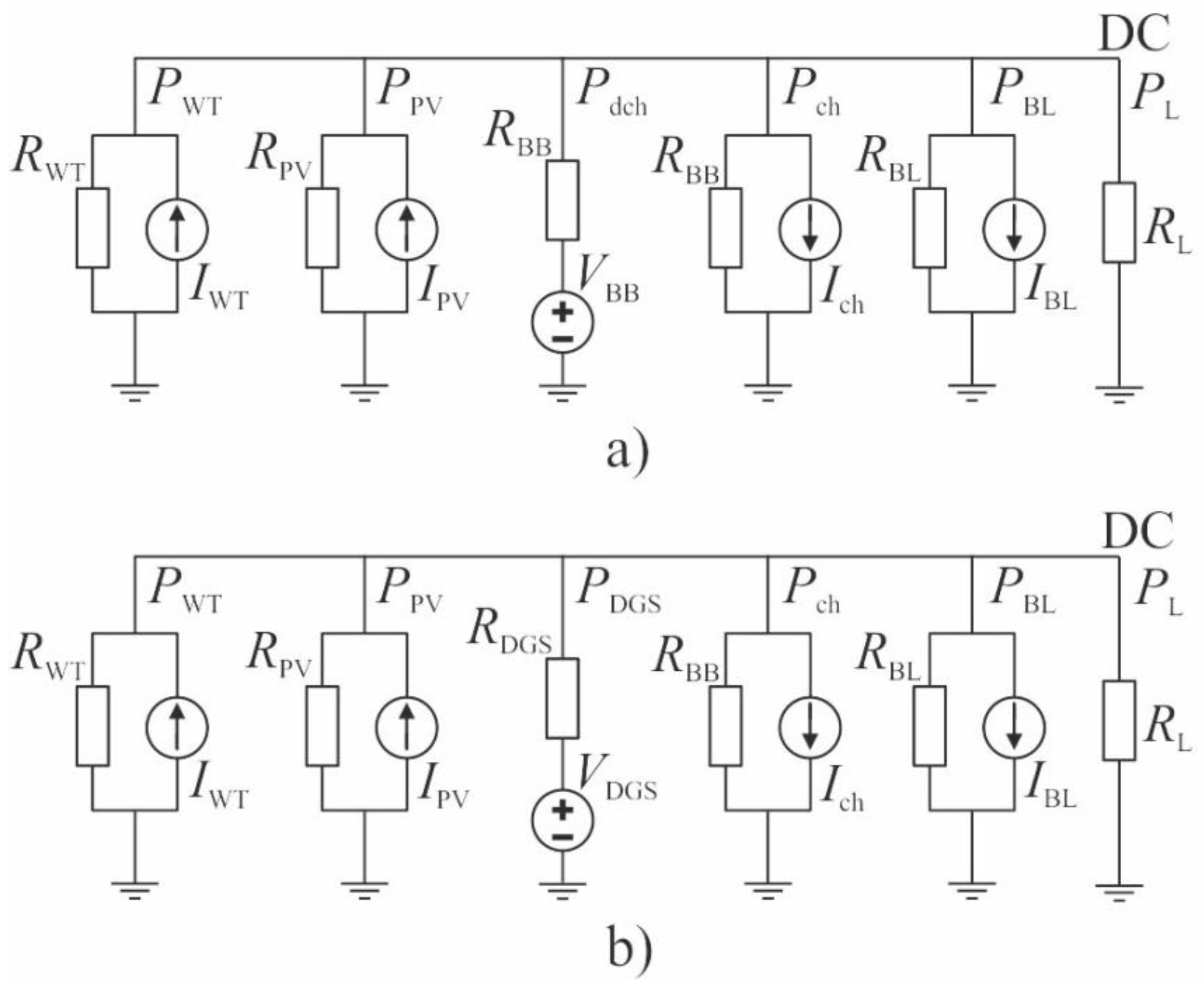
power consumer. From
Figure 2, it can be observed that simplified equivalent HRES substitution schemes are presented for the two main stabilization modes MODE1 and MODE2. In the stabilization mode MODE1 (
Figure 2a), it clear that power balance control in the system is provided by the discharge BB. In addition, in the stabilization mode MODE2 (
Figure 2b), the power balance is indicated by DGS. Since controlled power sources must provide stabilization of the DC bus voltage, they must operate in the mode of controlled voltage sources; all other power plants are controllable and uncontrolled current sources.
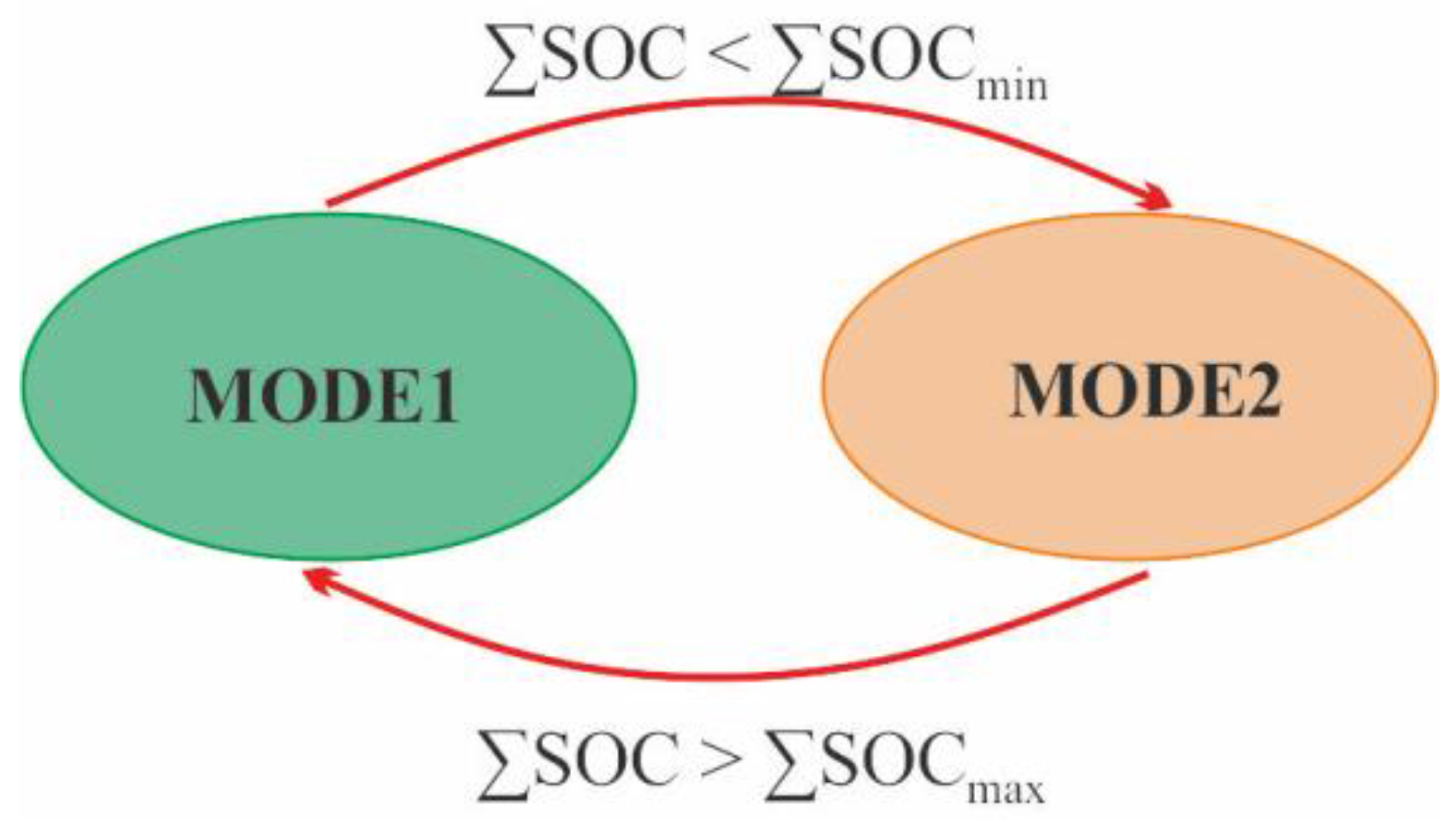
The total residual capacity value of the two BB ∑SOC is used as a criterion for changing the HRES operating modes. The transition diagram between the operating modes of HRES is schematically illustrated in
Figure 3.
The present values of ∑SOCmin and ∑SOCmax are determined at the stage of the system configuration and depend on the type of BESS uses, the ratio of the main generating sources capacities, the operating conditions of the power plant, the characteristics of the consumer’s electrical load, and in general should be optimized.
In the consideration of HRES, the following values of the total residual capacity of both BBs are taken: ∑SOCmin = 125% and ∑SOCmax = 185% from their rated capacity. The choice of these values is due to the fact that the considered project uses lead-acid BESS, which necessitates limiting their maximum depth of discharge (DOD) value being 60–70% of the nominal capacity.
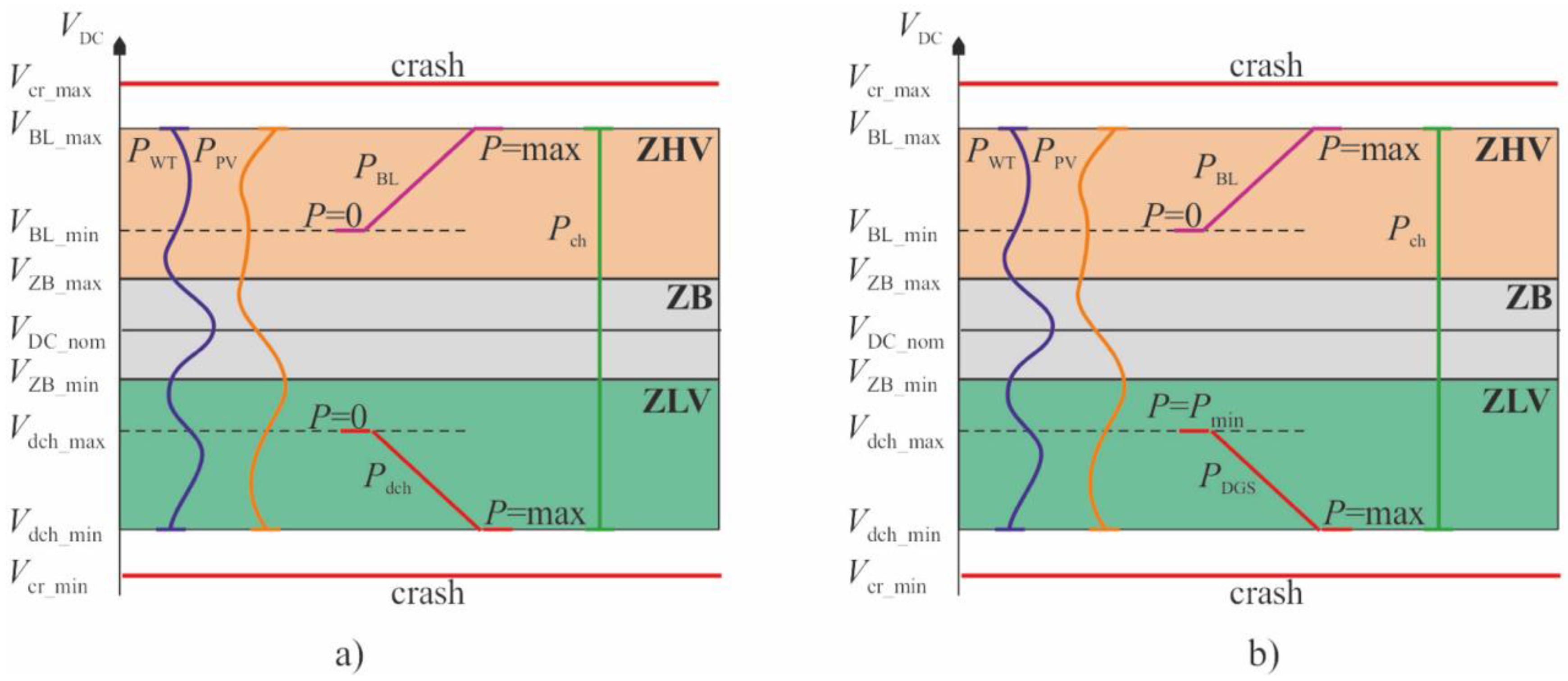
In the basic embodiment, there are three working zones of DC-bus voltage as illustrated in
Figure 4: Buffer zone (ZB), high voltage zone (ZHV), and low voltage zone (ZLV). In the ZHV zone, the total power generation of the RES installations exceeds the total consumption power, and an adjustable ballast load is used as a stabilizing source in this zone in the MODE1 and MODE2 modes. Structurally, the ballast load is a set of resistors that are connected to the DC-bus through a DC-DC converter. The current value (respectively power) of the converter is regulated according to the following equation:
Equation (2) determines the linear change in power consumption of the ballast load from zero to the nominal value of in the voltage range from to . For the practical implementation of the control system by Equation (2), it is necessary to measure two electrical parameters of the mode: The voltage of the DC-bus and input current of the converter .
The red lines in
Figure 4 indicates the area of accident-free functioning of the power plant. When the DC-bus voltage goes beyond the specified voltage
and
the operating mode of the energy system is initiated as an accident (crash), which is eliminated by means of emergency automation.
In the ZLV zone, the power consumption exceeds the total power generation of the RES installations and the stabilizing source in MODE1 mode is BB, which is operating in the discharge mode to the DC-bus as shown in
Figure 4a. The current magnitude (respectively power) discharge converter BB in MODE1 is regulated according to the following formula:
Equation (3) determines the linear change in the generated power of the discharge BB from zero to the nominal value Pdch_max in the voltage range from Vdch_max to Vdch_min. This equation has been used as control input signal for the DC-bus voltage value VDC and the value of the output current of the converter Idch.
The ZB buffer zone is used to reliably separate the operating modes of control sources in the system, moreover, its use allows minimizing (ideally eliminating) the number of transitions from the ZHV zone to the ZLV zone, which can lead to an unstable or oscillatory operation mode of the control system.
In MODE2 mode as illustrated in
Figure 4b, the main regulatory source of the power system is DGS. In order to preserve its operational life, it is necessary to minimize the number of connections and disconnections. In addition, in the DGS operating mode, it is necessary to ensure its loading at a level that is not less than 25% of its rated power. In the base case of the distribution of the working voltage zones for the MODE2 mode, the choice of the guaranteed charge of one BB is acceptable for consideration, and the second BB is transferred to the charge mode only after the first battery is fully charged.
In accordance with applying the algorithm of the current value (respectively power) of the DGS converter is regulated as follows:
The practical implementation of Equation (4) and the guaranteed charge of one BB during the connection of DGS provides an acceptable load factor of the diesel engine. This is achieved by limiting and retention of the DGS current that is not lower than some preset value , corresponding to the minimum permissible diesel load, for example 25% of the rated power. Technically, this requirement is realized by narrowing the control range of the output DGS converter by limiting the duty cycle value.
It should be noted that in order to implement the proposed control algorithms, it is necessary to fulfill a number of important relationships for ensuring the operation of the energy system within safe working areas as follows:
1. The value of the maximum permissible discharge power of one control BB
must be higher than the maximum electrical load
:
2. The nominal (maximum) value of the ballast load must satisfy the following equation:
A special case of this equation is the condition that the power of the minimum electric load is equal to zero = 0.
3. The rated power of the DGS must provide coverage for the maximum electrical load and the required charging power BB:
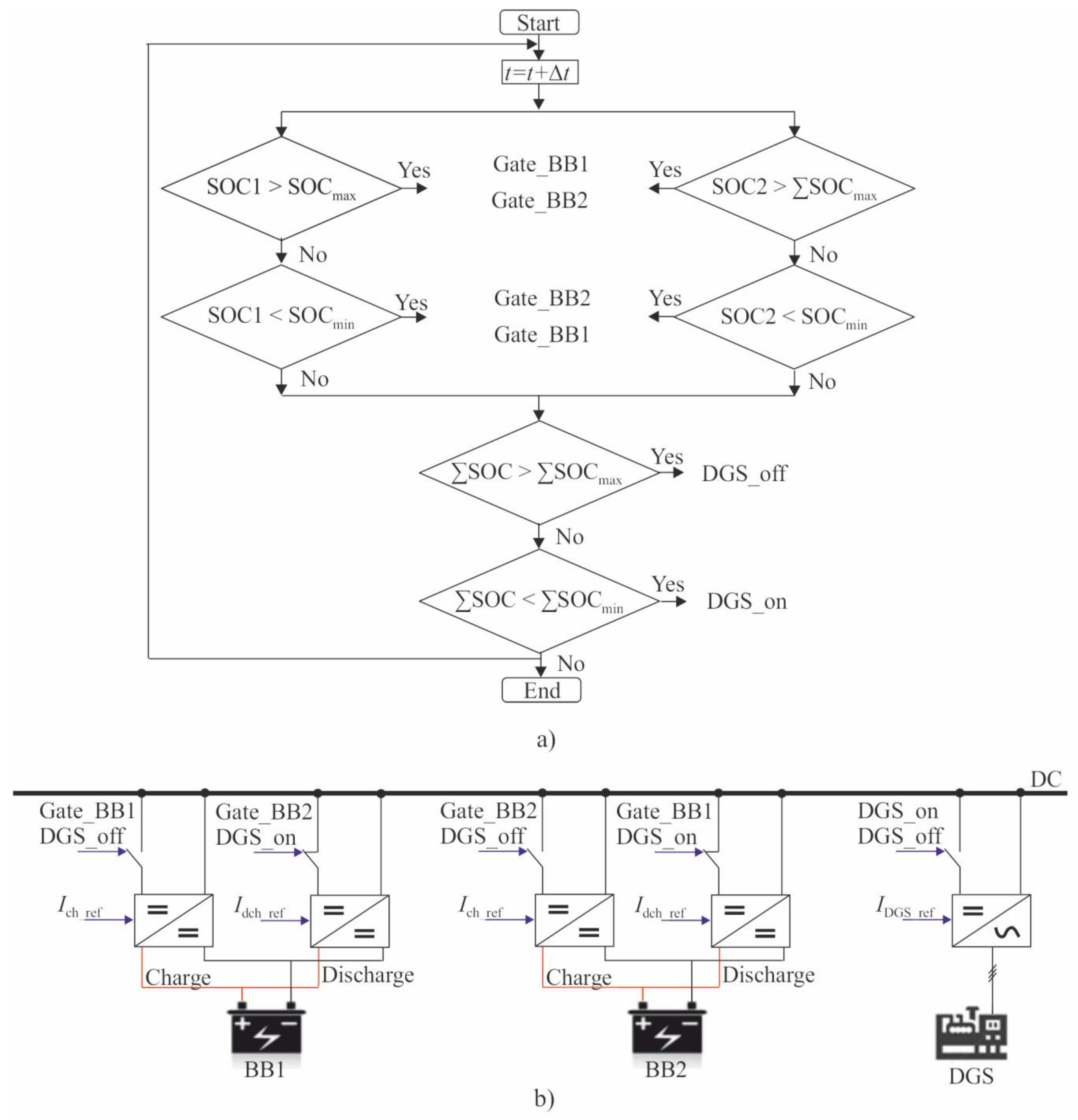
The idea of the proposed HRES mode control logic is to switch the BB from the charge mode to the discharge mode and vice versa according to the set threshold values of its residual capacity. Accordingly, for the practical implementation of this control logic, constant control of the residual capacity of each BB in real time mode is necessary. In addition, it is necessary to ensure control of the total residual capacity of BB ∑SOC, which is the value of the criterion for changing the operating modes of the energy system as shown in
Figure 3.
The logic of the proposed method for controlling HRES modes is explained in
Figure 5, which shows the block diagram of the mode control algorithm as in
Figure 5a and power circuits for connecting BESS and DGS to the DC-bus as in
Figure 5b.
One of the possible options for the circuit design of the DESS controller is to separate the functions of local and strategic control of converters. The DGS converter control system can be built in a similar pattern. When applying this approach, the signals of direct control of the converter keys (, , ) are formed according to the local current loop depending on the current values of the DC bus voltage and the output (input) current of the corresponding converter and control signals, providing switching of operating modes (Gate_BB1, Gate_BB2, DGS_on/off), are formed by the logic block of the controller depending on the current values of the residual capacity BB.
In the stabilizing sources power circuit illustrated in
Figure 5b, for greater clarity, the control signals generated by the controller logic block provide direct on/off BB and DGS converters due to the use of additional keys. In real schemes of constructing converters, the use of additional keys is not necessary, since the processes of switching on/off converters can be easily ensured by controlling the magnitude of the fill factor of transistors.
3. Methods and Object of Research
The MATLAB/Simulink software package (2018b, MathWorks, Natick, MA, USA) was used for this research work as the main research tool, in the environment of which, in accordance with the HRES block diagram as illustrated in
Figure 1, mathematical models of all the main components of the technical system under consideration were developed and implemented. Five types of models can be distinguished as part of the comprehensive HRES model: Primary energy carrier models (wind flow and solar radiation model), power plant models (DGS, WT, and PV), storage device models (SC and BESS), energy consumer models (L (Critical Loads) and BL), and models of power semiconductor converters.
In this work, the dynamic component models that are built on the basis of equations describing the physical processes of energy conversion have been used. A detailed description of the models of HRES components that were used in the research is given by [
31,
32,
33,
34,
35]. The models of components are made in the form of separating functional blocks, which makes it possible to construct and study HRES operating modes of arbitrary configuration [
35].
The autonomous HRES, geographically located in the Tomsk region, consisting of WT, with a rated power of 10 kW, was accepted as the object of study in this work (Vmin = 3 м/с, Vnom = 9 м/с), PV based on a solar battery of 18 Sunway’s FSM 340M photovoltaic modules (340M, FSM, Tomsk, Russia), a Geko 20012 ED-S/DEDA diesel generator sets (340M, FSM, Tomsk, Russia), rated power 16 kW, DESS (340M, FSM, Tomsk, Russia) on the basis of 20 pieces MONBAT 12MVR200 batteries per circuit, and a super capacitor module of three in series connected supercapacitors MSK-8-112 (340M, FSM, Tomsk, Russia), with a total capacity of 2.7 F.
To simulate the HRES electrical load, a characteristic daily schedule of household loads with a maximum of 10 kW was assumed while the value of the ballast load was assumed to be 16.2 kW. The PV option has been considered with a rigidly fixed solar panel oriented to the South and installed at an angle of 56.5° to the horizon.
4. Results and Discussions
To verify the operability and approbation of the proposed technical solutions, the results of computer simulation of HRES operating modes were used. A research plan was developed, in accordance with a series of computational experiments that was carried out for simulating the static and dynamic HRES modes possibilities during its operation.
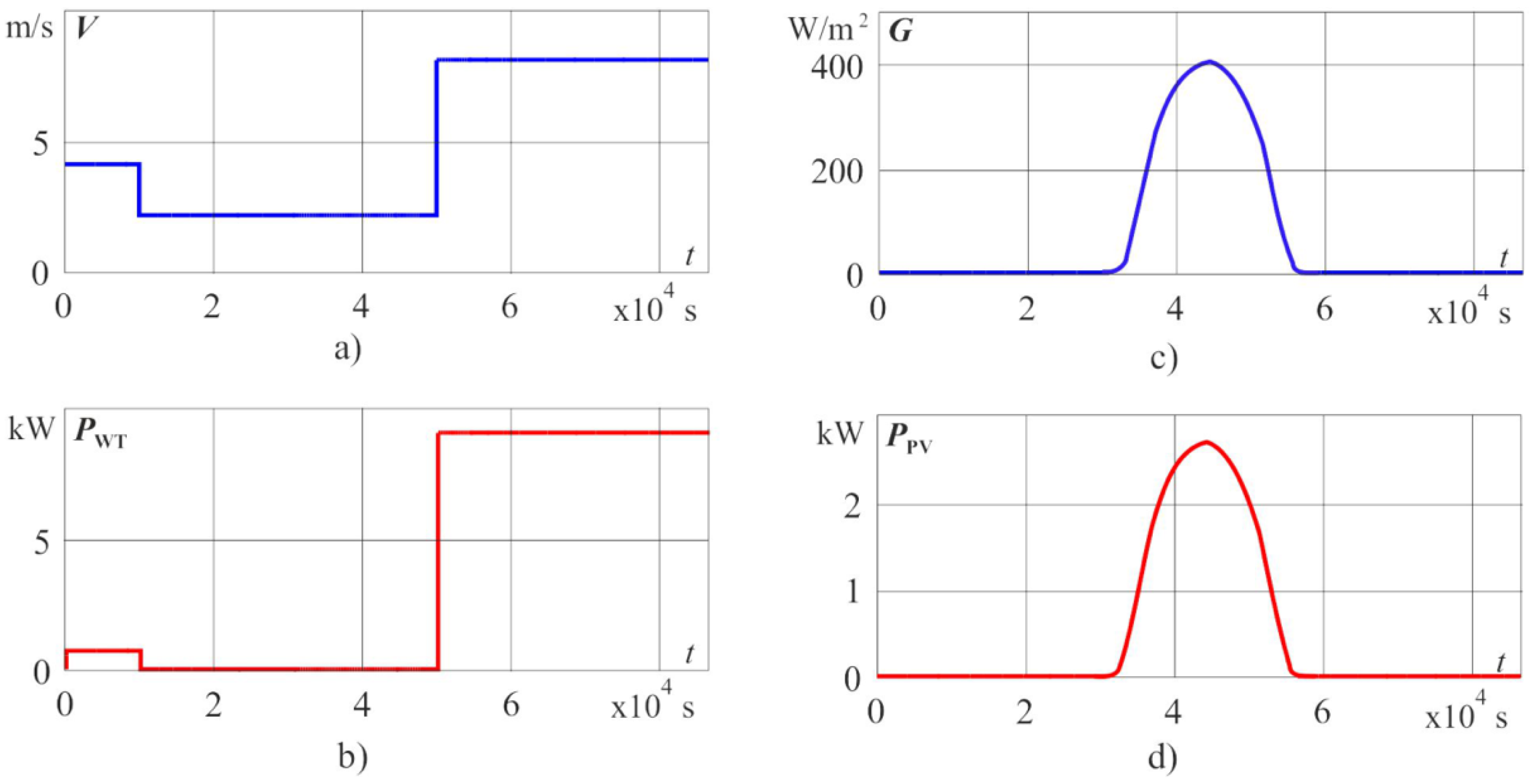
Figure 6 shows the results of modeling the electrical output of RES installations (P
PV and
PWT) at the daily time interval (86,400 s). Daily changes in solar radiation (
G) correspond to the winter solstice with average cloud cover. Wind speed (
V) is set by a step function with an amplitude of 2 m/s to 8 m/s, changing at model times of 10,000 and 50,000 s.
The explicit specification of the wind speed, which remains unchanged over long time intervals, allows us to solve two problems: On the one hand, significantly reduce the requirements for computer computing resources and thereby reduce simulation time; on the other hand, it makes the possibility to single out for the subsequent analysis that required operating modes of DESS and the entire energy system.
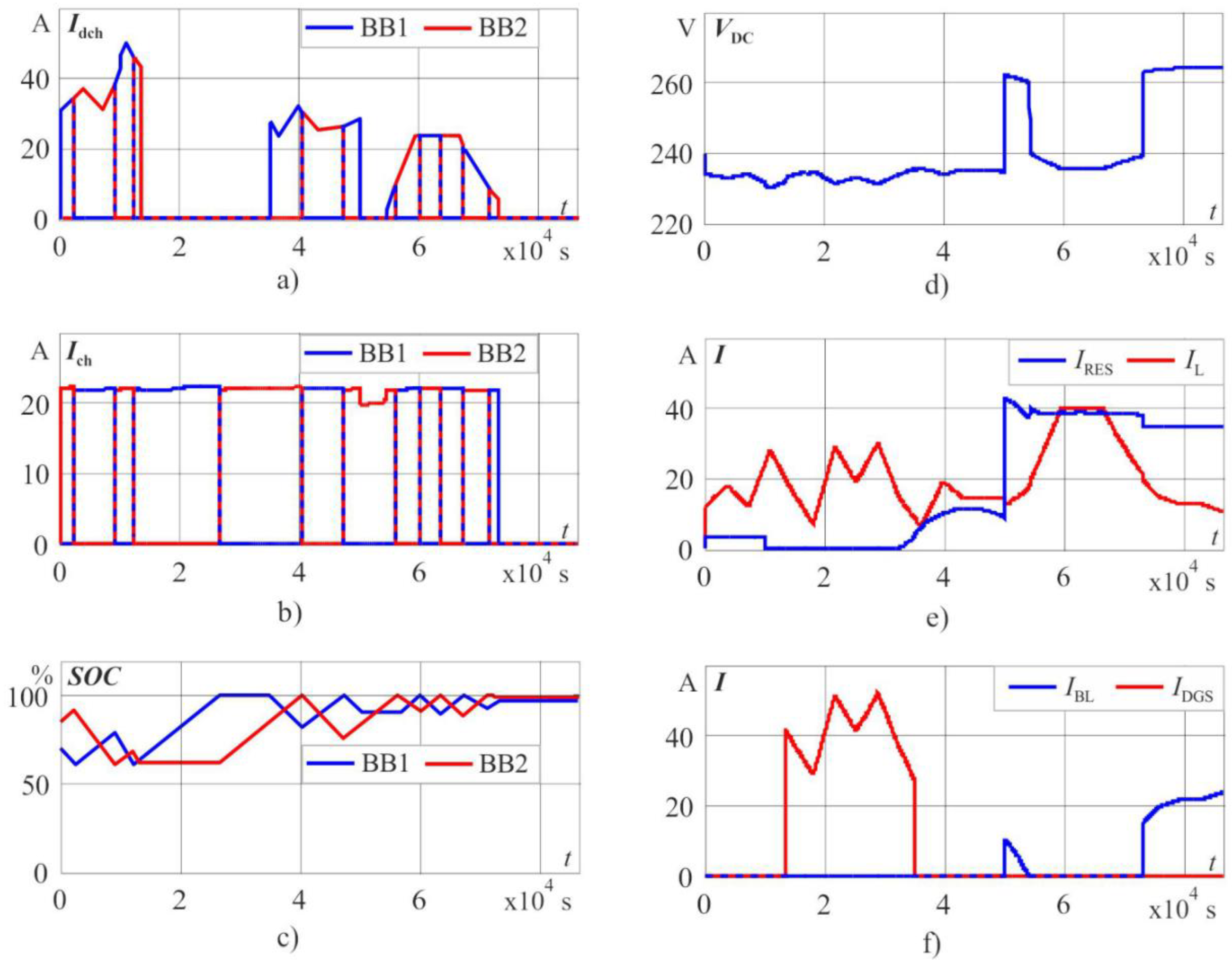
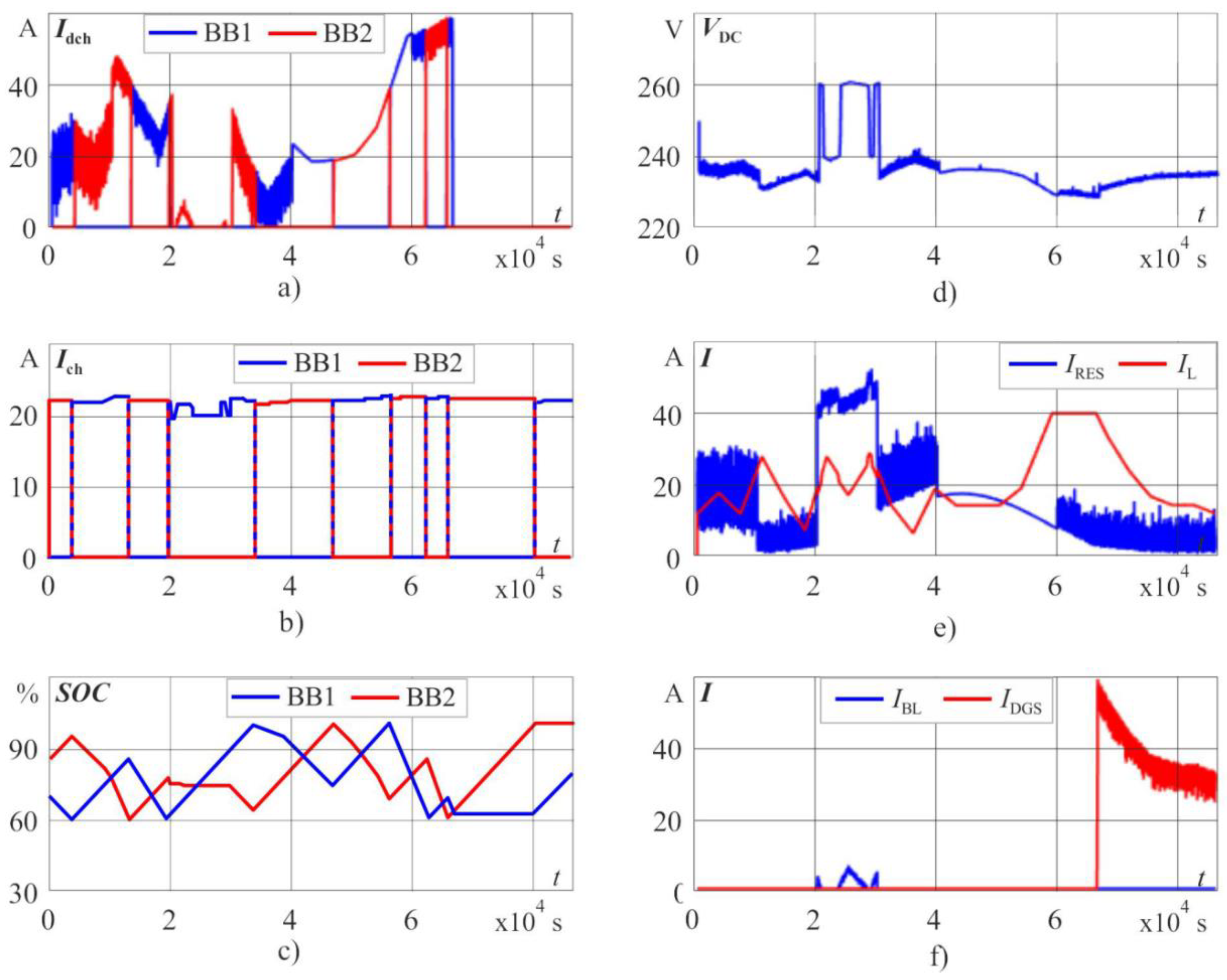
The results of HRES operating modes for the given characteristics of primary energy carriers are presented in
Figure 7. This Figure shows the graphs of the change in discharge current (
Idch), charge current (
Ich) and residual capacity (SOC), rechargeable batteries BB1 and BB2, bus bar voltage (
VDC), inflowing and outflowing currents of the DC-bus such as total current from RES installations (
IRES), actual current (
IL) and ballast (
IBL) loads, and current DGS (
IDGS).
An analysis of the obtained graphs in
Figure 7 shows that the power generated by the RES installations is not enough to fully cover the electrical load in the time interval from 0 s to 50,000 s. This leads to the fact that at a time of about 14,000 s both BBs are discharged below an acceptable threshold level (∑SOC < 125%). The logic block of the controller generates a control signal to start the DGS and in the time interval from 14,000 s to 35,000 s. The power balance management in the energy system is provided by DGS. The batteries BB1 and BB2 at this interval time are alternately charged, which is clearly seen in
Figure 7 from the presented graphs of their residual capacity SOC. When the total BB charge of the specified threshold level (∑SOC > 185%) is reached, the DGS is turned off and then the power balance is regulated by the discharge BB.
At intervals of model time from 50,000 s to 54,000 s and from 73,000 s to the end of the day under consideration, the generated total power by RES installations exceeds the power consumed by the payload and the recharged BB. In accordance with the specified algorithm as in
Figure 4, stabilization of the energy balance in the system at these modes is ensured by controlling the power of the ballast load.
An analysis of the simulation results indicates that the proposed algorithm ensures the stable operation of the energy system in MODE1 and MODE2 modes. In addition, the DC-bus voltage does not go beyond the specified working areas and all converters operate in normal mode.
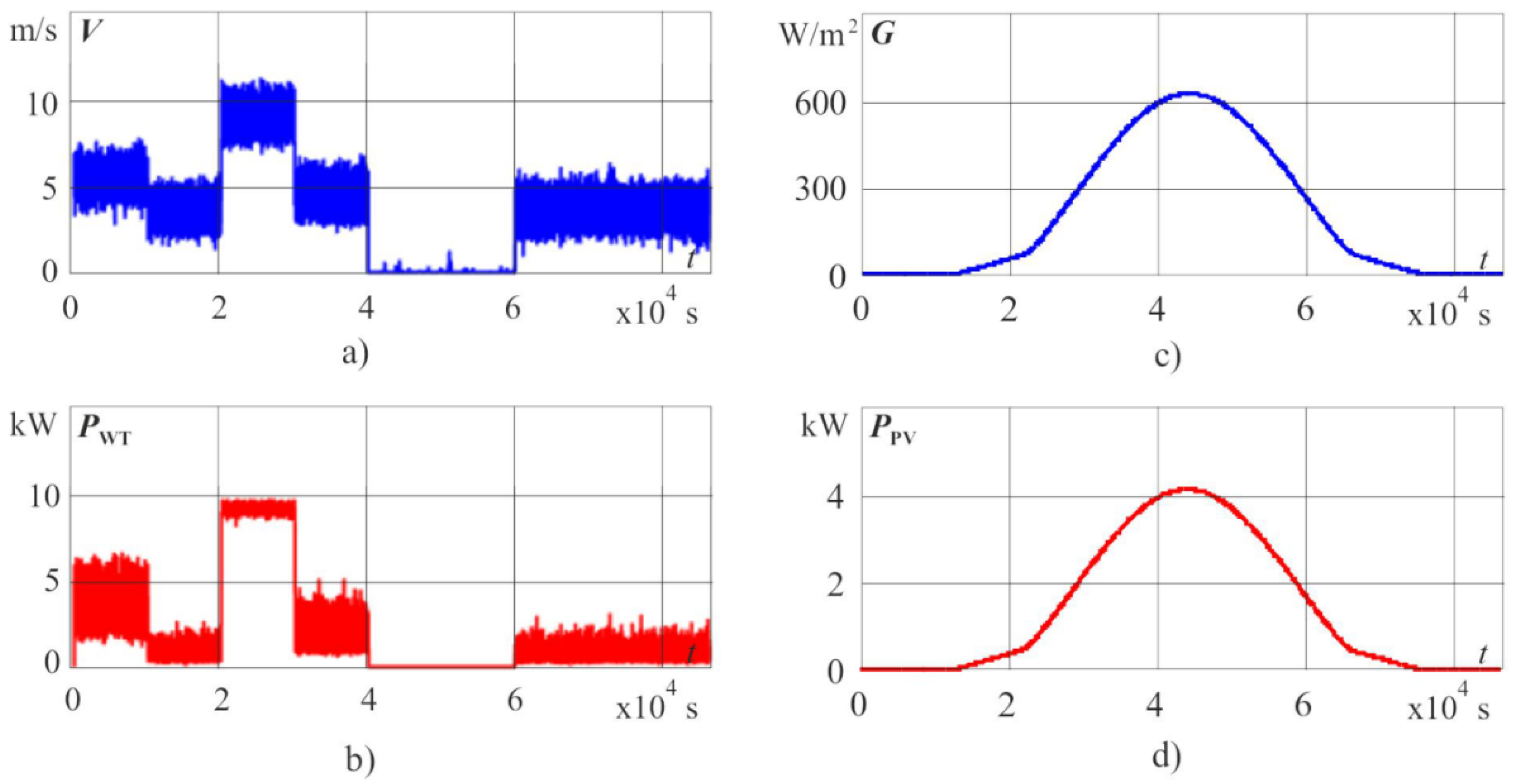
As the most complex tests for verifying the operability of the DESS control algorithm, it has been used the operating mode of the HRES daily modeling results taking into account the turbulent component of the wind speed [
32]. The turbulent component of the wind flow leads to the appearance of broadband ripple of the output power WT, which can lead to a loss of dynamic stability of the energy system. However, such operating conditions are typical for HRES and their analysis is mandatory.
Figure 8 and
Figure 9 show the results of modeling the daily HRES operating mode taking into account the turbulent component of the wind speed.
In this computational experiment, the summer solstice is considered with average cloud cover conditions and the average wind speed during the day varies from 0 m/s to 10 m/s as shown in
Figure 8, which corresponds to the entire working range of the simulated WT. From those presented graphs that shown in
Figure 9, the DESS control system ensures reliable and efficient control of the power balance in an isolated energy system in all possible operating modes.
The results of the computational experiments have confirmed the operability of the proposed architecture and algorithm for managing autonomous HRES modes with the high penetration of renewable sources.
The advantages of the considered DESS control algorithm are its relative simplicity and universality. This algorithm ensures BB charge modes with a stable current and minimizes BB switching modes from charge to discharge mode and vice versa, which ensures their safety and maximum operational life.
The proposed HRES construction architecture allows the use of power semiconductor converters with inconsistent characteristics and simple circuitry. From the point of view of operational reliability, HRES is quite tenacious, since no information communication between the converters of RES installations is required, the failure of any converter or generating source, except the output inverter, does not violate the overall operability of the energy system. The simplicity of changing the system configuration is ensured by adding/excluding generating sets of various types and different manufacturers to the power plant without the need to change the control system settings.
Analysis of the annual energy balance of the HRES under consideration, geographically located in the Tomsk region, showed that the use of DESS with the proposed control algorithm provides an increase in energy production by RES installations and, consequently, an increase in energy efficiency by 28% compared to standard HRES construction methods. It should be noted that the value of this indicator largely depends on the energy potential of RES at the location of the power plant, the ratio of installed capacities and technical characteristics of the main power equipment and load, and can reach values up to 60% [
36].
At present, a DESS experimental model for a rated power of 15 kW has been manufactured on the basis of battery and super capacitor modules, a set of outline design documentation, a program and methodology for its research tests have been developed. This year, it is planned to test the DESS experimental model as a part of the test bench of the local power supply system with renewable energy sources, which will assess the feasibility and effectiveness of its practical application in real power systems, verify the adopted layout decisions, and also find technical solutions to improve it designs.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








