Feasible Islanding Operation of Electric Networks with Large Penetration of Renewable Energy Sources considering Security Constraints


 , ,
, ,
Abstract
:1. Introduction
2. Island Feasibility Procedure
2.1. Frequency-Response Models of Power System Components
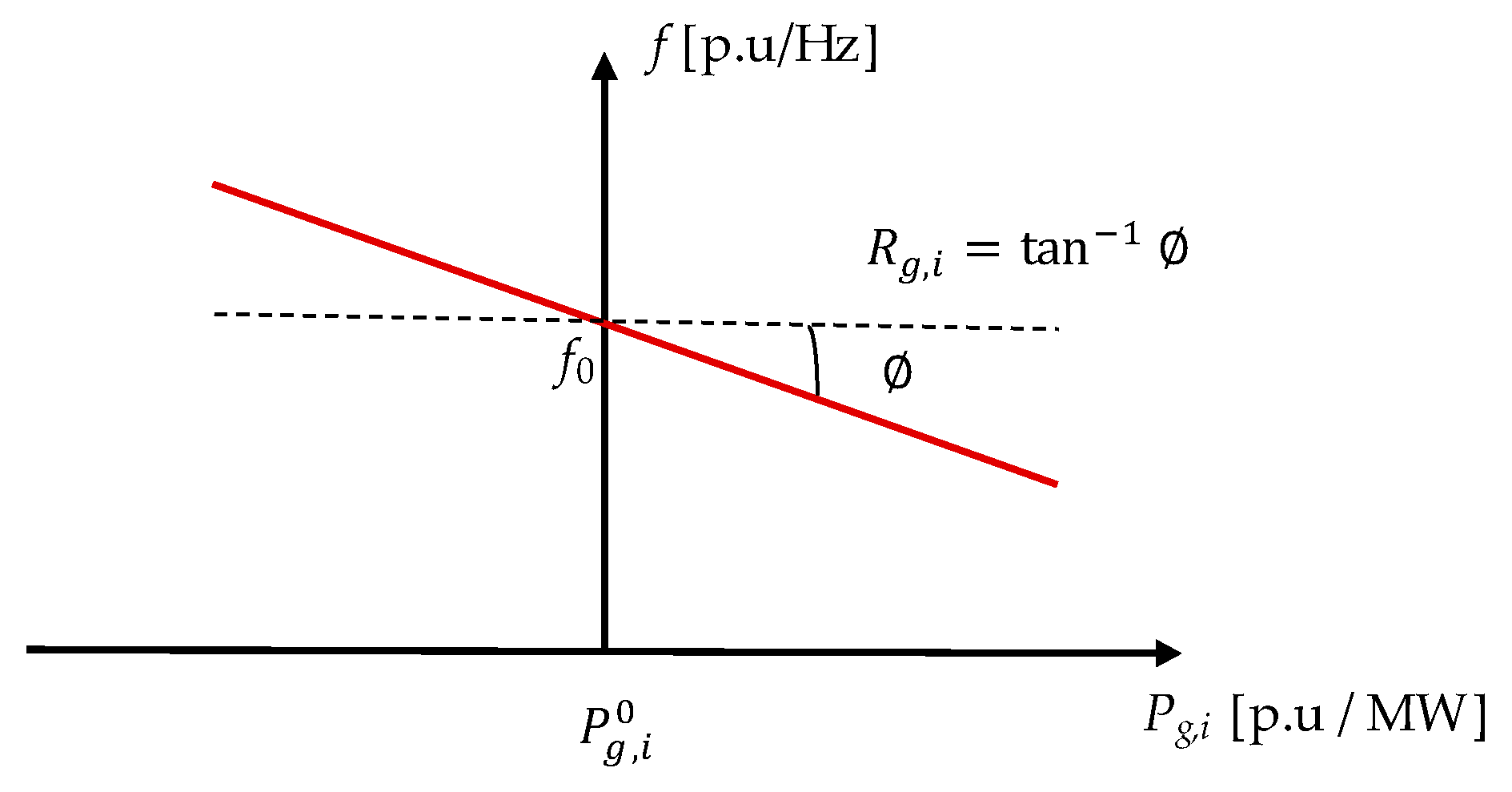
2.1.1. The Synchronous Generator Model
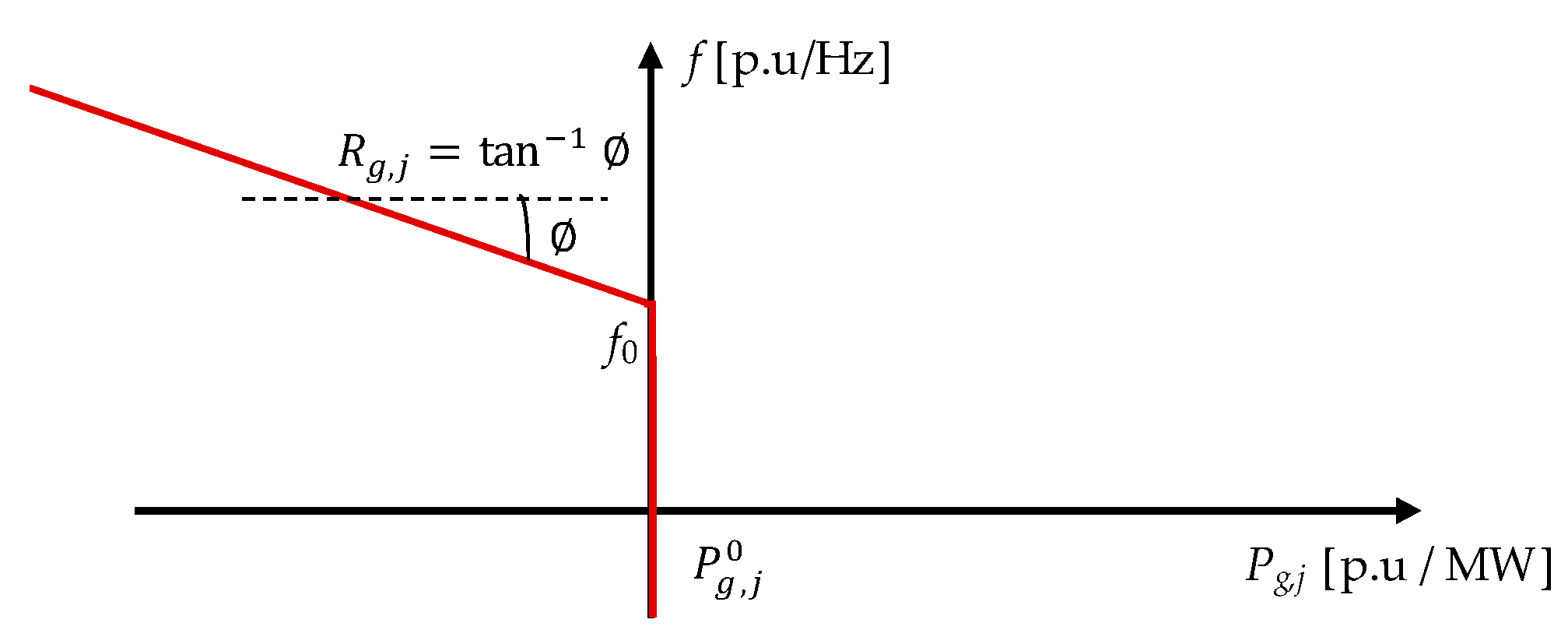
2.1.2. The RES Generator Model
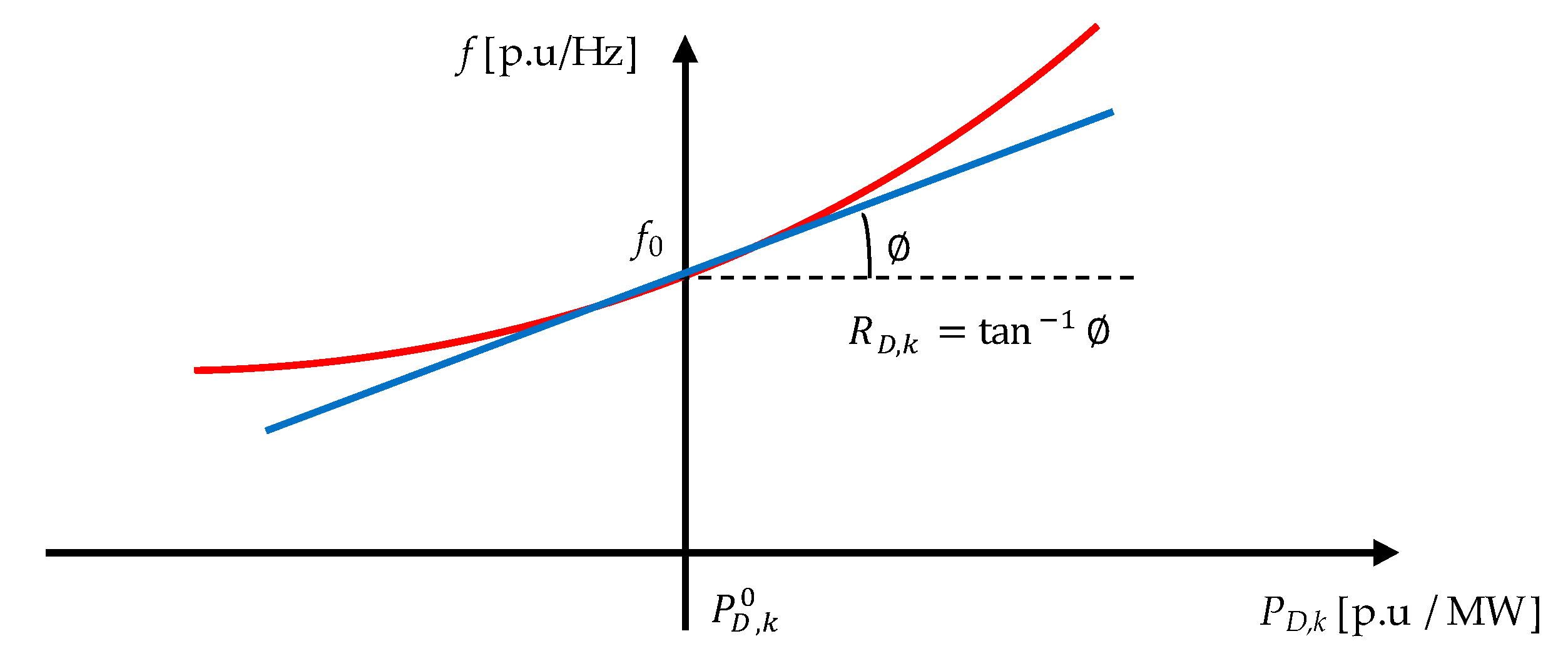
2.1.3. The Demand Response Model
2.2. Basic Optimization Model
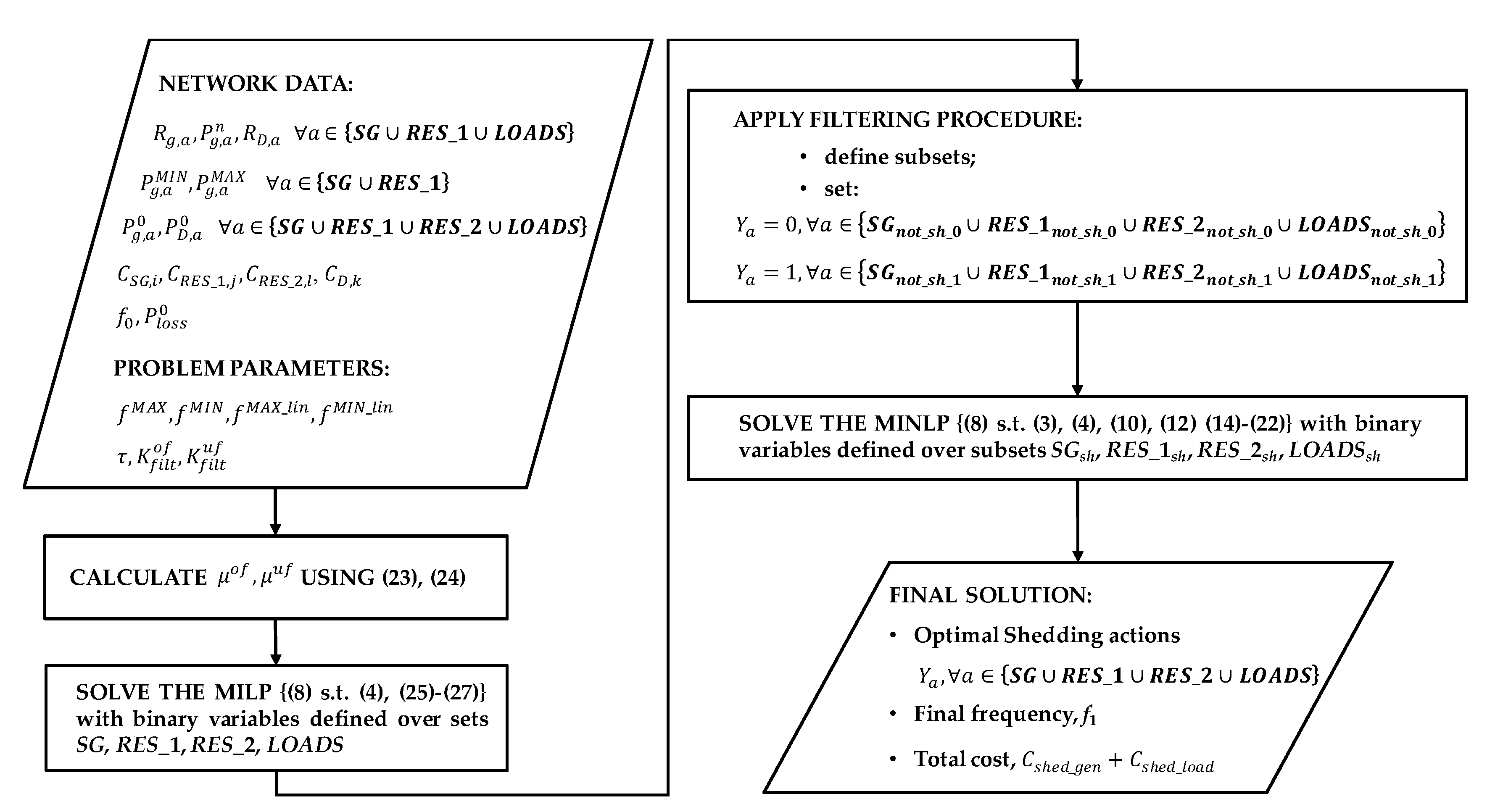
2.3. Advanced Optimization Model: Decomposition Model
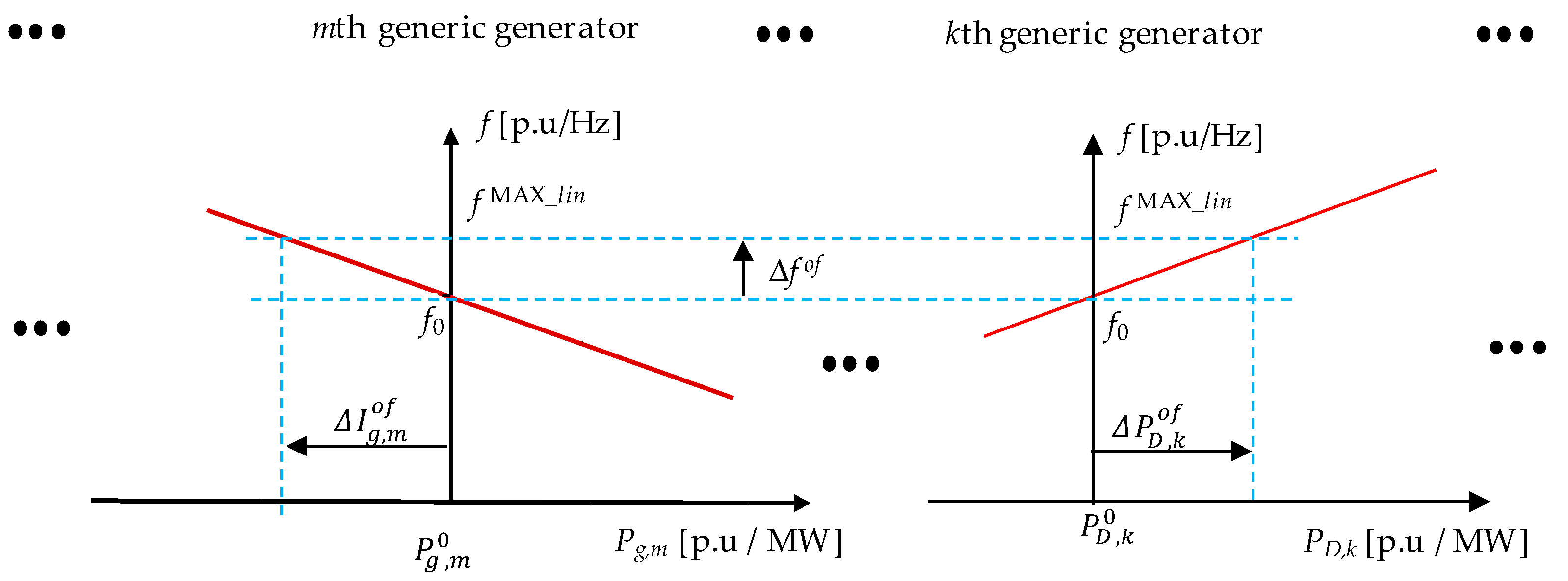
2.3.1. The Linear Optimization Problem
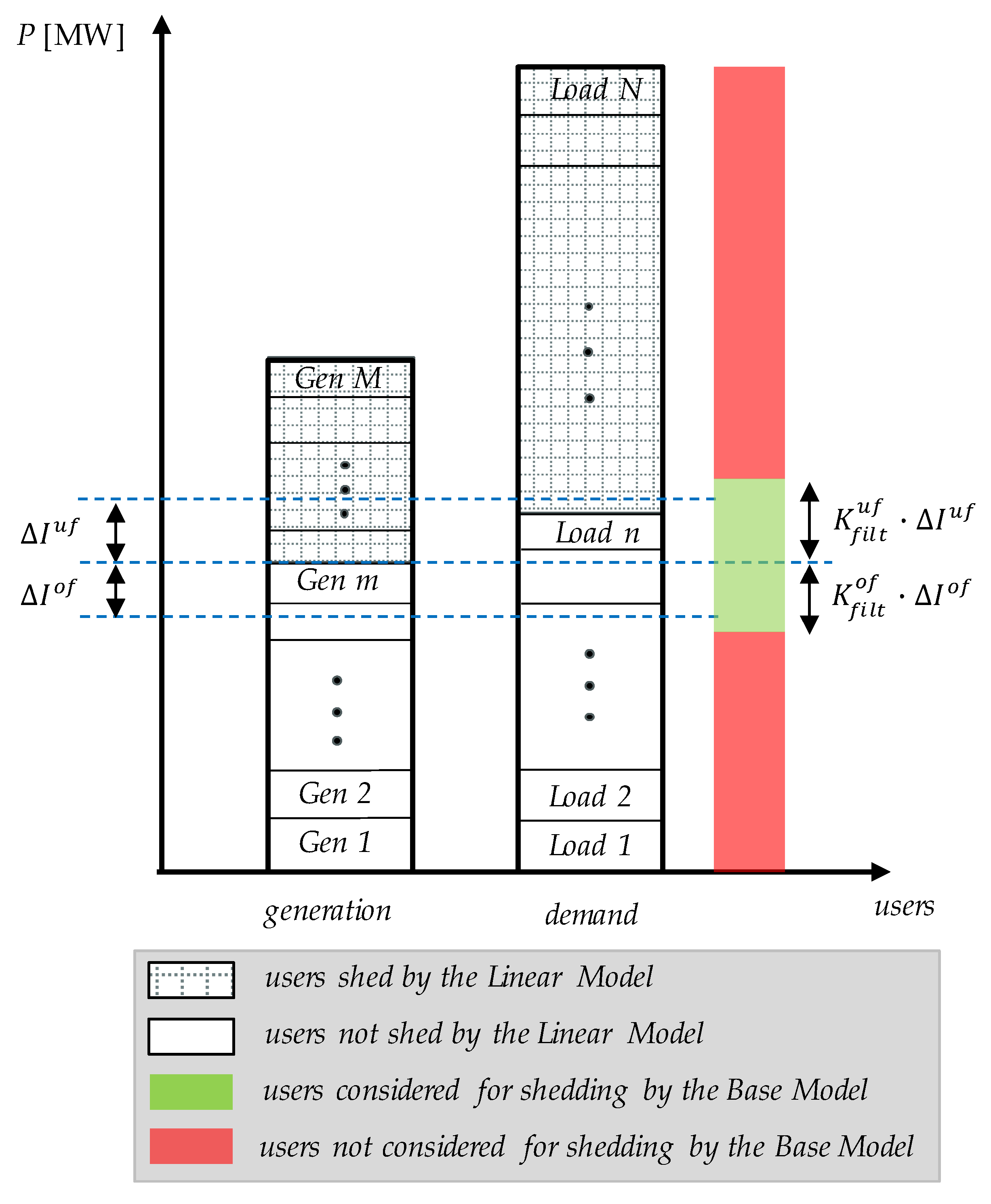
2.3.2. The Filtering Procedure
3. Results
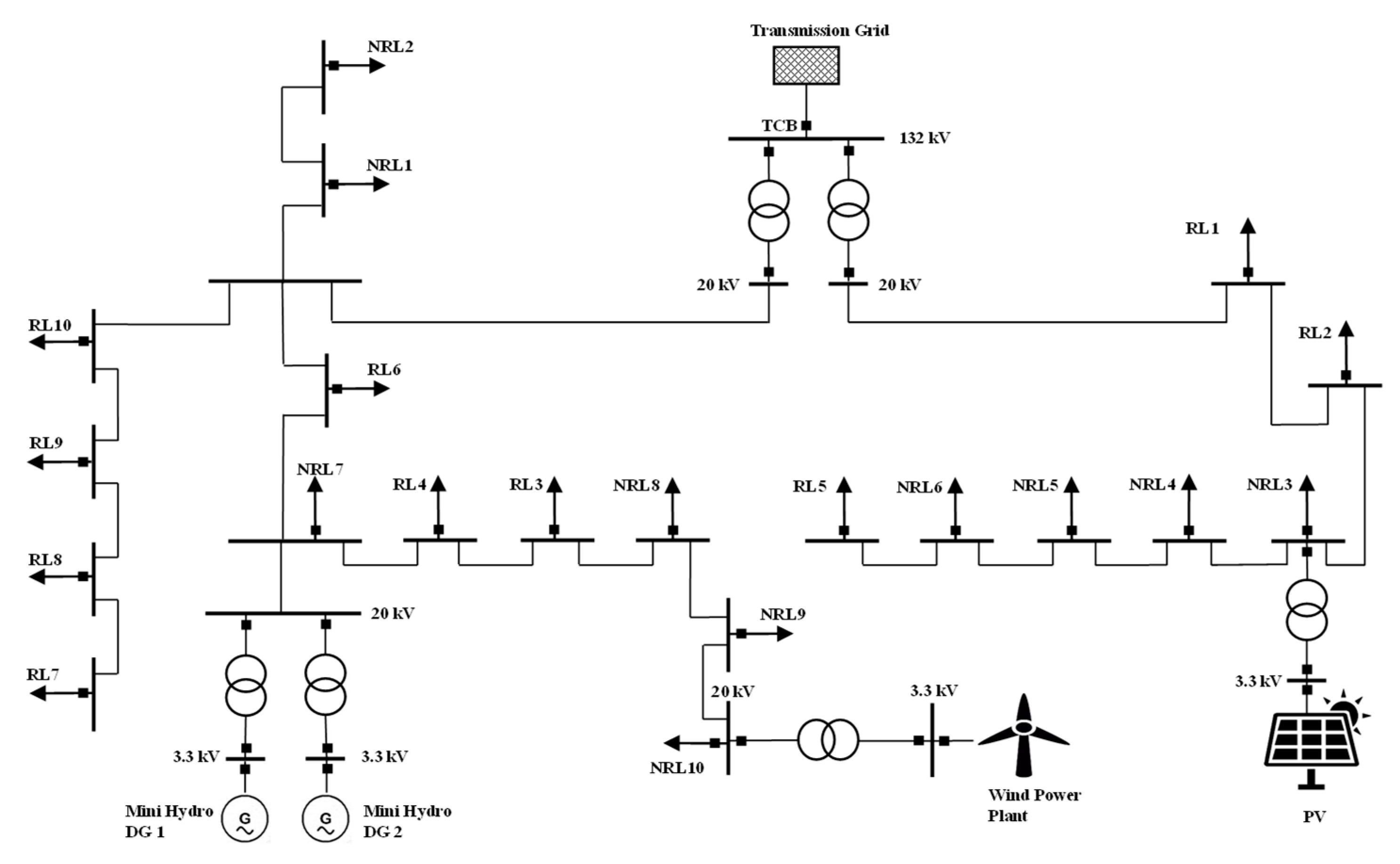
3.1. Test Network-Base Configuration
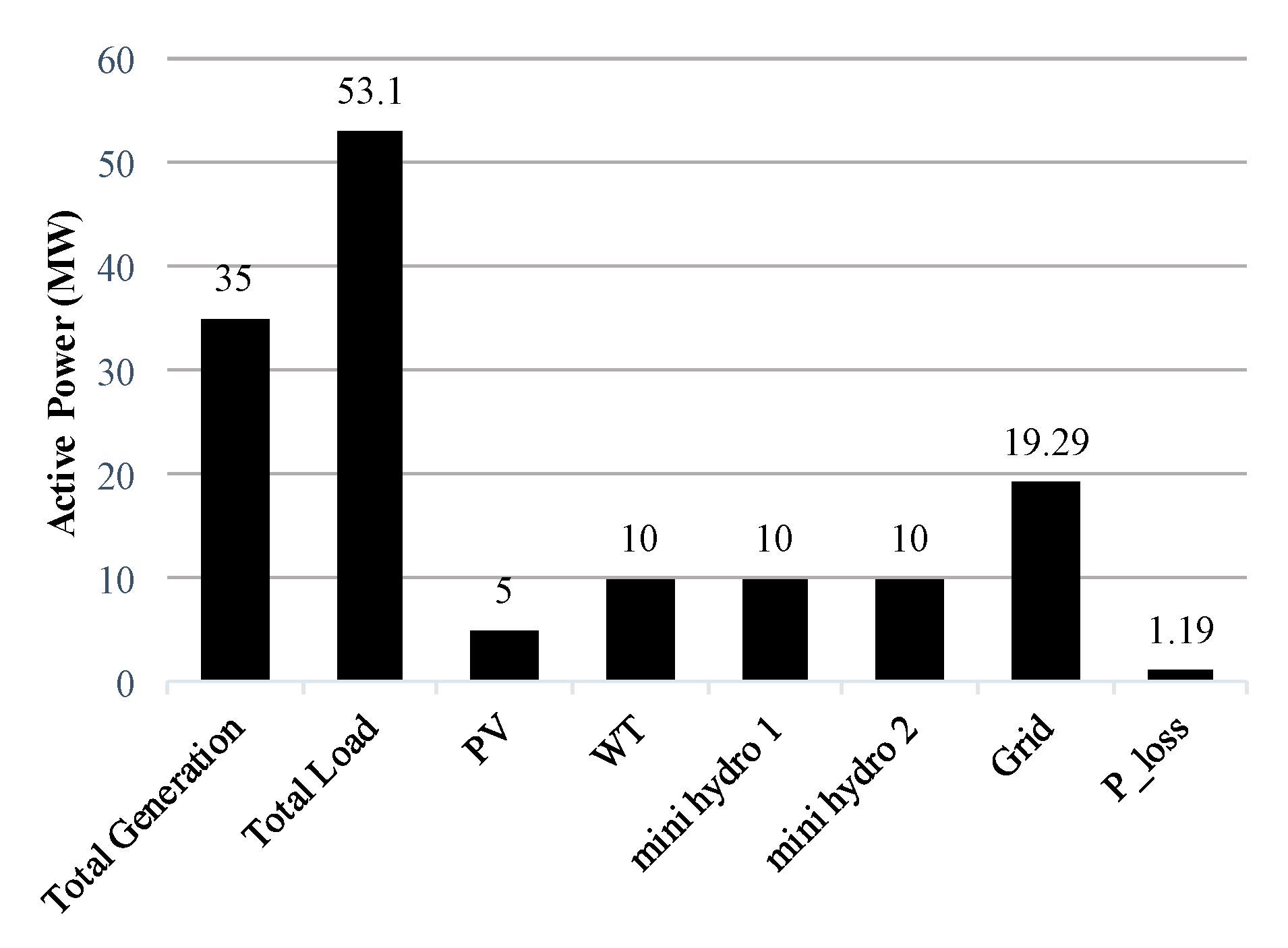
3.2. Results of the Base Configuration
3.3. High Penetration of Distributed Generation Configuration
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Stock, D.S.; Sala, F.; Berizzi, A.; Hofmann, L. Optimal Control of Wind Farms for Coordinated TSO-DSO Reactive Power Management. Energies 2018, 11, 173. [Google Scholar] [CrossRef]
- Berizzi, A.; Bovo, C.; Ilea, V.; Merlo, M.; Miotti, A.; Zanellini, F. Decentralized congestion mitigation in HV distribution grids with large penetration of renewable generation. Int. J. Electr. Power Energy Syst. 2015, 71, 51–59. [Google Scholar] [CrossRef]
- Berizzi, A.; Bovo, C.; Allahdadian, J.; Ilea, V.; Merlo, M.; Miotti, A.; Zanellini, F. Innovative automation functions at a substation level to increase res penetration. In Proceedings of the CIGRE 2011 Bologna Symposium—The Electric Power System of the Future: Integrating Supergrids and Microgrids, Bologna, Italy, 13–15 September 2011. [Google Scholar]
- Arrigoni, C.; Bigoloni, M.; Rochira, I.; Bovo, C.; Merlo, M.; Ilea, V.; Bonera, R. Smart Distribution Management System: Evolution of MV grids supervision & control systems. In Proceedings of the International Annual Conference: Sustainable Development in the Mediterranean Area, Energy and ICT Networks of the Future, AEIT 2016, Capri, Italy, 5–7 October 2016. [Google Scholar]
- Mirbagheri, S.M.; Moncecchi, D.; Falabretti, D.; Merlo, M. Voltage control in Active Distribution Grids: A Review and a New Set-Up Procedure for Local Control Laws. In Proceedings of the IEEE 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 1203–1208. [Google Scholar]
- Singh, R.; Pal, B.C.; Vinter, R.B. Measurement placement in distribution system state estimation. IEEE Trans. Power Syst. 2009, 24, 668–675. [Google Scholar] [CrossRef]
- Bovo, C.; Ilea, V.; Subasic, M.; Zanellini, F.; Arigoni, C.; Bonera, R. Improvement of observability in poorly measured distribution networks. In Proceedings of the 2014 Power Systems Computation Conference, PSCC 2014, Wroclaw, Poland, 18–22 August 2014. [Google Scholar]
- Grau, L.; Cipcigan, N.J.; Papadopoulos, P. Microgrid intentional islanding for network emergencies. In Proceedings of the 44th International Universities Power Engineering Conference (UPEC), Glasgow, UK, 1–4 September 2009; pp. 1–5. [Google Scholar]
- El-Zonkoly, M.S.; Khalil, R. New algorithm based on clpso for controlled islanding of distribution systems. Int. J. Electr. Power Energy Syst. 2013, 45, 391–403. [Google Scholar] [CrossRef]
- Lasseter, R.H. MicroGrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; Volume 1, pp. 305–308. [Google Scholar]
- Integration of Distributed Energy Resource: The Certs Microgrid Concept, Report; Tech. Rep. P500-03-089F; California Energy Commission: Sacramento, CA, USA, 2002.
- Lopes, J.; Moreira, C.; Madureira, A. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Saffarian, A.; Sanaye-Pasand, M. Enhancement of power system stability using adaptive combinational load shedding methods. IEEE Trans. Power Syst. 2011, 26, 1010–1020. [Google Scholar] [CrossRef]
- Tang, J.; Liu, J.; Ponci, F.; Monti, A. Adaptive load shedding based on combined frequency and voltage stability assessment using synchrophasor measurements. IEEE Trans. Power Syst. 2013, 28, 2035–2047. [Google Scholar] [CrossRef]
- Seyedi, H.; Sanaye-Pasand, M. New centralised adaptive load-shedding algorithms to mitigate power system blackouts. IET Gener. Transm. Distrib. 2009, 3, 99–114. [Google Scholar] [CrossRef]
- Abedini, M.; Sanaye-Pasand, M.; Azizi, S. Adaptive load shedding scheme to preserve the power system stability following large disturbances. IET Gener. Transm. Distrib. 2014, 8, 2124–2133. [Google Scholar] [CrossRef]
- Hoseinzadeh, B.; Da Silva, F.; Leth Bak, C. Adaptive tuning of frequency thresholds using voltage drop data in decentralized load shedding. IEEE Trans. Power Syst. 2015, 30, 2055–2062. [Google Scholar] [CrossRef]
- Alavi, S.A.; Ahmadian, A.; Golkar, M.A. Optimal probabilistic energy management in a typical micro-grid based-on robust optimization and point estimate method. Energy Convers. Manag. 2015, 95, 314–325. [Google Scholar] [CrossRef]
- Das, K.; Nitsas, A.; Altin, M.; Hansen, A.D.; Sørensen, P.E. Improved Load Shedding Scheme considering Distributed Generation. IEEE Trans. Power Deliv. 2017, 32, 515–524. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Hsiao, M.C.; Chang, Y.R.; Lee, Y.D.; Huang, H.C. Multiscenario underfrequency load shedding in a microgrid consisting of intermittent renewables. IEEE Trans. Power Deliv. 2013, 28, 1610–1617. [Google Scholar] [CrossRef]
- Hoseinzadeh, B.; da Silva, F.F.; Bak, C.L. Decentralized coordination of load shedding and plant protection considering high share of res. IEEE Trans. Power Syst. 2016, 31, 3607–3615. [Google Scholar] [CrossRef]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. Underfrequency load shedding for an islanded distribution system with distributed generators. IEEE Trans. Power Deliv. 2010, 25, 911–918. [Google Scholar] [CrossRef]
- Gu, W.; Liu, W.; Shen, C.; Wu, Z. Multi-stage underfrequency load shedding for islanded microgrid with equivalent inertia constant analysis. Int. J. Electr. Power Energy Syst. 2013, 46, 36–39. [Google Scholar] [CrossRef]
- Nisar, A.; Thomas, M.S. Comprehensive control for microgrid autonomous operation with demand response. IEEE Trans. Smart Grid 2016, 8, 2081–2089. [Google Scholar] [CrossRef]
- Gouveia, C.; Moreira, J.; Moreira, C.L.; Lopes, J.P. Coordinating storage and demand response for microgrid emergency operation. IEEE Trans. Smart Grid 2013, 4, 1898–1908. [Google Scholar] [CrossRef]
- Allahdadian, J.; Berizzi., A.; Bovo, C.; Gholami, M.; Ilea, V.; Merlo, M.; Miotti, A.; Zanellini, F. Detection of Island Feasibility in Subtransmission Systems. Int. Rev. Electr. Eng. 2013, 8, 1108–1118. [Google Scholar]
- Allahdadian, J.; Berizzi., A.; Bovo, C.; Ilea, V.; Gholami, M. Island feasibility considering reactive power in the subtransmission systems. In Proceedings of the 2013 48th International Universities’ Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013. [Google Scholar]
- Bovo, C.; Ilea, V.; Rolandi, C. A Security-Constrained Islanding Feasibility Optimization Model in the Presence of Renewable Energy Sources. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe, EEEIC/I and CPS Europe 2018, Palermo, Italy, 12–15 June 2018. [Google Scholar]
- Guo, G.; Wang, L. Self-healing Resilience Strategy to Active Distribution Network Based on Benders Decomposition Approach. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Conference, Xi’an, China, 25–26 October 2016. [Google Scholar]
- Machowski, J.; Bialek, J.; Bumby, J. Frequency Stability and Control. In Power Systems Dynamics: Stability and Control, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2008; ISBN 978-0-470-72558-0. [Google Scholar]
- General Algebraic Modelling System. 2012. Available online: https://www.gams.com/ (accessed on 7 June 2018).
- LINDO. 2012. Available online: https://lindo.com/ (accessed on 24 March 2018).
- CPLEX Optimizer. 2012. Available online: https://www.ibm.com/analytics/cplex-optimizer (accessed on 12 December 2018).
- Laghari, J.A.; Karimi, M.; Abu Bakar, A.H.; Mohamad, H. A new under-frequency load shedding technique based on combination of fixed and random price of loads for smart grid applications. IEEE Trans. Power Syst. 2015, 30, 2507–2515. [Google Scholar] [CrossRef]
- Digsilent Powerfactory. 2018. Available online: http://www.digsilent.de/ (accessed on 15 November 2018).
- Italian TSO, Sistemi di Controllo e Protezione Delle Centrali Eoliche. 2018. Available online: http://www.terna.it/ (accessed on 17 July 2018).
- Gestore Mercati Energetici. 2018. Available online: http://www.mercatoelettrico.org/it/ (accessed on 18 January 2019).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load | P [MW] | Q [Mvar] | Load | P [MW] | Q [Mvar] | ||
|---|---|---|---|---|---|---|---|
| RL1 | 0.595 | 0.304 | 1 | NRL1 | 0.059 | 0.088 | 1 |
| RL2 | 0.305 | 0.113 | 1 | NRL2 | 0.091 | 0.028 | 1 |
| RL3 | 0.12 | 0.074 | 1 | NRL3 | 0.46 | 0.125 | 1 |
| RL4 | 0.33 | 0.128 | 0.8 | NRL4 | 0.315 | 0.126 | 0.8 |
| RL5 | 0.314 | 0.125 | 0.8 | NRL5 | 0.044 | 0.04 | 0.8 |
| RL6 | 0.069 | 0.042 | 0.8 | NRL6 | 0.532 | 0.225 | 0.8 |
| RL7 | 0.078 | 0.06 | 0.6 | NRL7 | 0.22 | 0.092 | 0.6 |
| RL8 | 0.22 | 0.14 | 0.6 | NRL8 | 0.455 | 0.106 | 0.6 |
| RL9 | 0.2 | 0.12 | 0.6 | NRL9 | 0.45 | 0.08 | 0.6 |
| RL10 | 0.32 | 0.16 | 0.6 | NRL10 | 0.133 | 0.024 | 0.6 |
| Units | Costs [€/MW] |
|---|---|
| SG | 1000 |
| RES_1 | 500 |
| RES_2 | 250 |
| NRL | 400 |
| Load | RL1 | RL2 | RL3 | RL4 | RL5 | RL6 | RL7 | RL8 | RL9 | RL10 |
| Costs [€/MW] | 123 | 138 | 177 | 180 | 118 | 149 | 145 | 190 | 150 | 175 |
| Case | Model | Cost [€] | Demand | Comp. Time [s] | ||||
|---|---|---|---|---|---|---|---|---|
| No. Shed | Shed [MW] | |||||||
| 1 | 49.4 | Based | 7.26 | 49.424 | 1523.27 | 30 RL | 12.14 | 41.26 |
| Advanced | 7.182 | 49.43 | 1534.58 | Step1 | 12.218 | 1.04 | ||
| 31 RL | ||||||||
| Step2 | ||||||||
| -- | ||||||||
| 2 | 49.6 | Based | 4.964 | 49.605 | 1881.094 | 50 RL | 14.436 | 40.22 |
| Advanced | 4.772 | 49.62 | 1922.94 | Step1 | 14.628 | 2.44 | ||
| 31 RL | ||||||||
| Step2 | ||||||||
| 16 RL | ||||||||
| 3 | 49.8 | Based | 2.465 | 49.803 | 2285.86 | 59 RL | 16.785 | 64 |
| Advanced | 2.483 | 49.802 | 2285.46 | Step1 | 16.737 | 3.158 | ||
| 30 RL | ||||||||
| Step2 | ||||||||
| 25 RL | ||||||||
| Case | Model | Model | f [Hz] | WT [MW] | PV [MW] | Mini Hydro 1 [MW] | Mini Hydro 2 [MW] |
|---|---|---|---|---|---|---|---|
| 1 | Based | GAMS | 49.424 | 10 | 5 | 13.46 | 13.46 |
| Dyn | 49.4232 | 10 | 5 | 13.4608 | 13.4608 | ||
| err % | 0.002 | 0 | 0 | 0.006 | 0.006 | ||
| Advanced | GAMS | 49.43 | 10 | 5 | 13.42 | 13.42 | |
| Dyn | 49.4297 | 10 | 5 | 13.4219 | 13.4219 | ||
| err % | 0.0006 | 0 | 0 | 0.014 | 0.014 | ||
| 2 | Based | GAMS | 49.605 | 10 | 5 | 12.37 | 12.37 |
| Dyn | 49.6131 | 10 | 5 | 12.3214 | 12.3214 | ||
| err % | 0.016 | 0 | 0 | 0.394 | 0.394 | ||
| Advanced | GAMS | 49.62 | 10 | 5 | 12.28 | 12.28 | |
| Dyn | 49.6281 | 10 | 5 | 12.2314 | 12.2314 | ||
| err % | 0.016 | 0 | 0 | 0.397 | 0.397 | ||
| 3 | Based | GAMS | 49.803 | 10 | 5 | 11.18 | 11.18 |
| Dyn | 49.806 | 10 | 5 | 11.1636 | 11.1636 | ||
| err % | 0.006 | 0 | 0 | 0.147 | 0.147 | ||
| Advanced | GAMS | 49.802 | 10 | 5 | 11.19 | 11.19 | |
| Dyn | 49.8024 | 10 | 5 | 11.1856 | 11.1856 | ||
| err % | 0.0008 | 0 | 0 | 0.039 | 0.039 |
| Cases | DN 1 (Transformer 1) | DN 2 (Transformer 2) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MH1 and MH2 | PV1 | WPP1 | WPP2 | Grid | All Gen | All Load | MH3 | MH4 | PV2 | PV3 | WPP3 | Grid | All Gen | All Load | |
| 4 | 5 | 5 | 5 | 5 | −8.7 | 25 | 15.39 | 2.5 | 2.5 | 3 | 3 | 4 | 13.2 | 15 | 27.45 |
| 5 | 7/8 | 2 | 4 | 4 | −8.7 | 25 | 15.39 | 5 | 5 | 1 | 1 | 3 | 13.3 | 15 | 27.45 |
| 6 | 2.5 | 3 | 4 | 3 | 11.4 | 15 | 25.65 | 5 | 5 | 5 | 5 | 5 | −7.6 | 25 | 16.47 |
| 7 | 5 | 1 | 2 | 2 | 11.4 | 15 | 25.65 | 7 | 8 | 2.5 | 2.5 | 5 | −7.6 | 25 | 16.47 |
| Model | Network | Cost [€] | Loads | Comp. Time [s] | ||||
|---|---|---|---|---|---|---|---|---|
| No. shed | Shed [MW] | |||||||
| 4 | Basic | DN1 | 50.9 | 50.331 | 0 | ----- | ----- | 2.27 |
| DN1 | 50.3 | 50.294 | 250 | ----- | ----- | 2.37 | ||
| DN2 | 49.4 | 49.402 | 927.03 | 34 RL | 5.745 | 35.41 | ||
| DN2 | 49.8 | 49.802 | 1896.7 | 54 RL 1 NRL | 10.69 | 12.47 | ||
| Advanced | DN1 | 50.9 | 50.331 | 0 | ----- | ----- | 2.15 | |
| DN1 | 50.3 | 50.294 | 250 | ----- | ----- | 2.23 | ||
| DN2 | 49.4 | 49.403 | 954.4 | Step 1: 15 RL Step 2: 18 RL | 5.754 | 4.64 | ||
| DN2 | 49.8 | 49.805 | 1801.7 | Step 1: 38 RL Step 2: 19 RL | 10.72 | 4.5 | ||
| 5 | Basic | DN1 | 50.9 | 50.33 | 0 | ----- | ----- | 2.7 |
| DN1 | 50.3 | 50.293 | 250 | ----- | ----- | 2.8 | ||
| DN2 | 49.4 | 49.401 | 954.8 | 40 RL | 5.801 | 52.9 | ||
| DN2 | 49.8 | 49.801 | 1808.7 | 60 RL | 10.74 | 11.17 | ||
| Advanced | DN1 | 50.9 | 50.33 | 0 | ----- | ----- | 2.56 | |
| DN1 | 50.3 | 50.293 | 250 | ----- | ----- | 2.8 | ||
| DN2 | 49.4 | 49.404 | 984.826 | Step 1: 16 RL Step 2: 18 RL 2 NRL | 5.832 | 4.97 | ||
| DN2 | 49.8 | 49.806 | 1821.55 | Step 1: 38 RL Step 2: 19 RL | 10.8 | 2.7 | ||
| 6 | Basic | DN1 | 49.4 | 49.421 | 512.3 | 7 RL | 4.165 | 77.33 |
| DN1 | 49.8 | 49.82 | 1102.37 | 20 RL | 9.09 | 94.18 | ||
| DN2 | 50.9 | 50.401 | 0 | ----- | ----- | 2.56 | ||
| DN2 | 50.3 | 50.3 | 500 | ----- | ----- | 2.57 | ||
| Advanced | DN1 | 49.4 | 49.402 | 514.105 | Step 2: 11 RL 4 NRL | 3.911 | 4.09 | |
| DN1 | 49.8 | 49.822 | 1124.36 | Step 1: 12 RL Step 2: 10 RL | 9.12 | 1.9 | ||
| DN2 | 50.9 | 50.401 | 0 | ----- | ----- | 1.17 | ||
| DN2 | 50.3 | 50.3 | 500 | ----- | ----- | 0.99 | ||
| 7 | Basic | DN1 | 49.4 | 49.402 | 531.71 | 11 RL 6 NRL | 3.955 | 34.46 |
| DN1 | 49.8 | 49.816 | 1102.37 | 20 RL | 9.09 | 32.21 | ||
| DN2 | 50.9 | 50.401 | 0 | ------ | ----- | 2.8 | ||
| DN2 | 50.3 | 50.3 | 500 | ------ | ----- | 2.786 | ||
| Advanced | DN1 | 49.4 | 49.406 | 500.91 | Step 2: 14 RL | 4.013 | 3.26 | |
| DN1 | 49.8 | 49.816 | 1102.37 | Step 1: 12 RL Step 2: 8 RL | 9.09 | 6.03 | ||
| DN2 | 50.9 | 50.401 | 0 | ------ | ----- | 1.37 | ||
| DN2 | 50.3 | 50.3 | 500 | ------ | ----- | 1.47 | ||
| Err % | f | SGs | RES Gens. | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MH 1 | MH 2 | MH 3 | MH 4 | PV 1 | PV 2 | PV 3 | WP 1 | WP 2 | WP 3 | ||
| min | 0 | 0 | 0 | 0.031 | 0.031 | 0 | 0 | 0 | 0 | 0 | 0 |
| average | 0.004 | 0.196 | 0.195 | 0.308 | 0.305 | 0 | 0 | 0 | 0.025 | 0.043 | 0 |
| max | 0.014 | 0.659 | 0.659 | 0.870 | 0.870 | 0 | 0 | 0 | 0.143 | 0.330 | 0 |
| std | 0.005 | 0.230 | 0.230 | 0.307 | 0.309 | 0 | 0 | 0 | 0.053 | 0.100 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alavi, S.A.; Ilea, V.; Saffarian, A.; Bovo, C.; Berizzi, A.; Seifossadat, S.G. Feasible Islanding Operation of Electric Networks with Large Penetration of Renewable Energy Sources considering Security Constraints. Energies 2019, 12, 537. https://doi.org/10.3390/en12030537
Alavi SA, Ilea V, Saffarian A, Bovo C, Berizzi A, Seifossadat SG. Feasible Islanding Operation of Electric Networks with Large Penetration of Renewable Energy Sources considering Security Constraints. Energies. 2019; 12(3):537. https://doi.org/10.3390/en12030537
Chicago/Turabian StyleAlavi, Seyed Arash, Valentin Ilea, Alireza Saffarian, Cristian Bovo, Alberto Berizzi, and Seyed Ghodratollah Seifossadat. 2019. "Feasible Islanding Operation of Electric Networks with Large Penetration of Renewable Energy Sources considering Security Constraints" Energies 12, no. 3: 537. https://doi.org/10.3390/en12030537
APA StyleAlavi, S. A., Ilea, V., Saffarian, A., Bovo, C., Berizzi, A., & Seifossadat, S. G. (2019). Feasible Islanding Operation of Electric Networks with Large Penetration of Renewable Energy Sources considering Security Constraints. Energies, 12(3), 537. https://doi.org/10.3390/en12030537