Analysis of Numerical Methods to Include Dynamic Constraints in an Optimal Power Flow Model †



Abstract
:1. Introduction
2. Optimization Model
2.1. Network and Load Modeling
2.2. Modeling of Power Plants in the Optimization Model
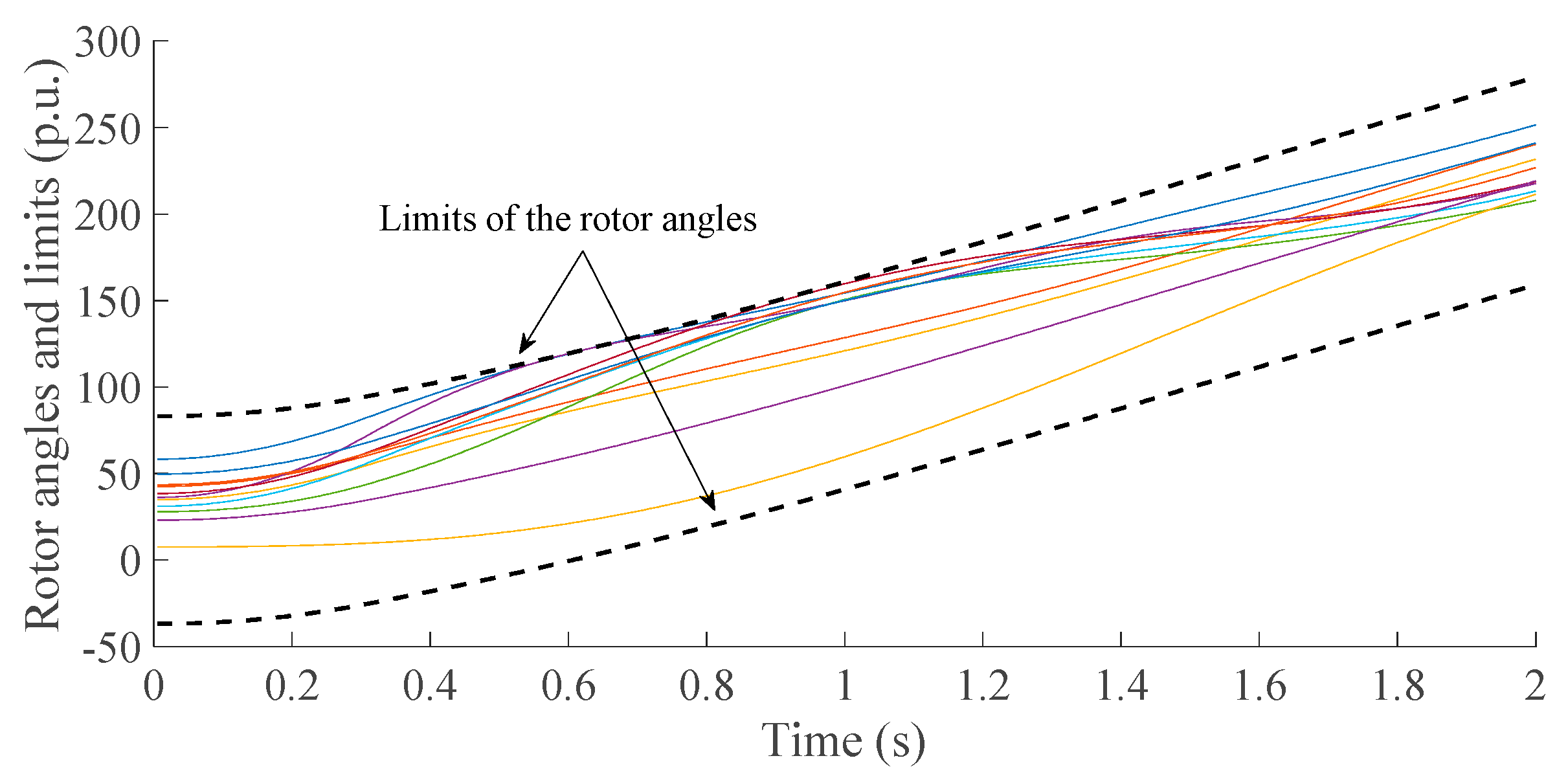
2.3. Stability Limits
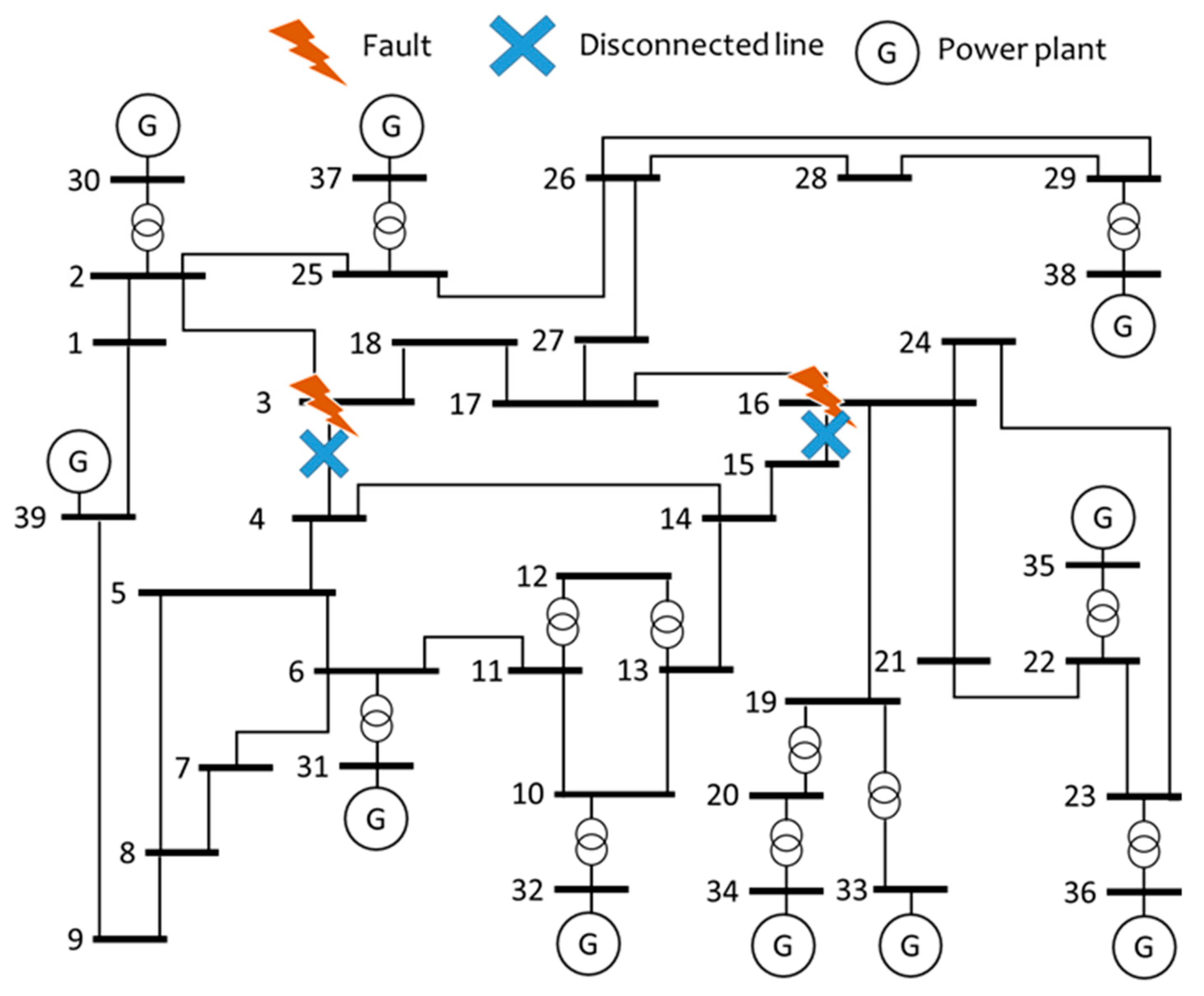
3. Implementation and Case Study
- A three-phase short-circuit occurs in the transmission line connecting buses 15 and 16—adjacent to bus 16. The fault is cleared by opening the circuit breakers at the two ends of this line after 300 ms.
- A three-phase short-circuit occurs in the transmission line connecting buses 3 and 4—adjacent to bus 3. The fault is cleared by opening the circuit breakers at the two ends of this line after 300 ms.
4. Results and Discussion
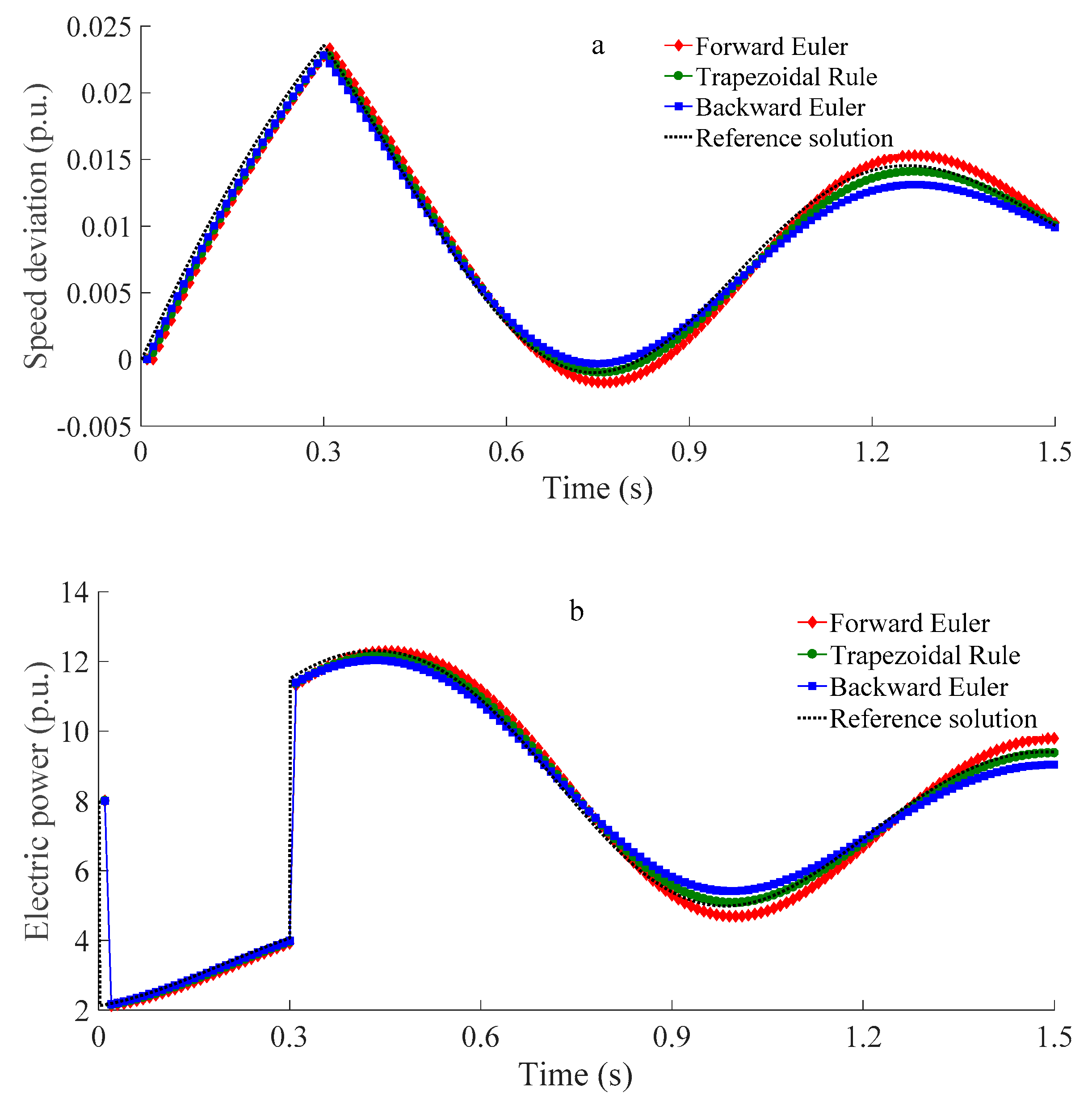
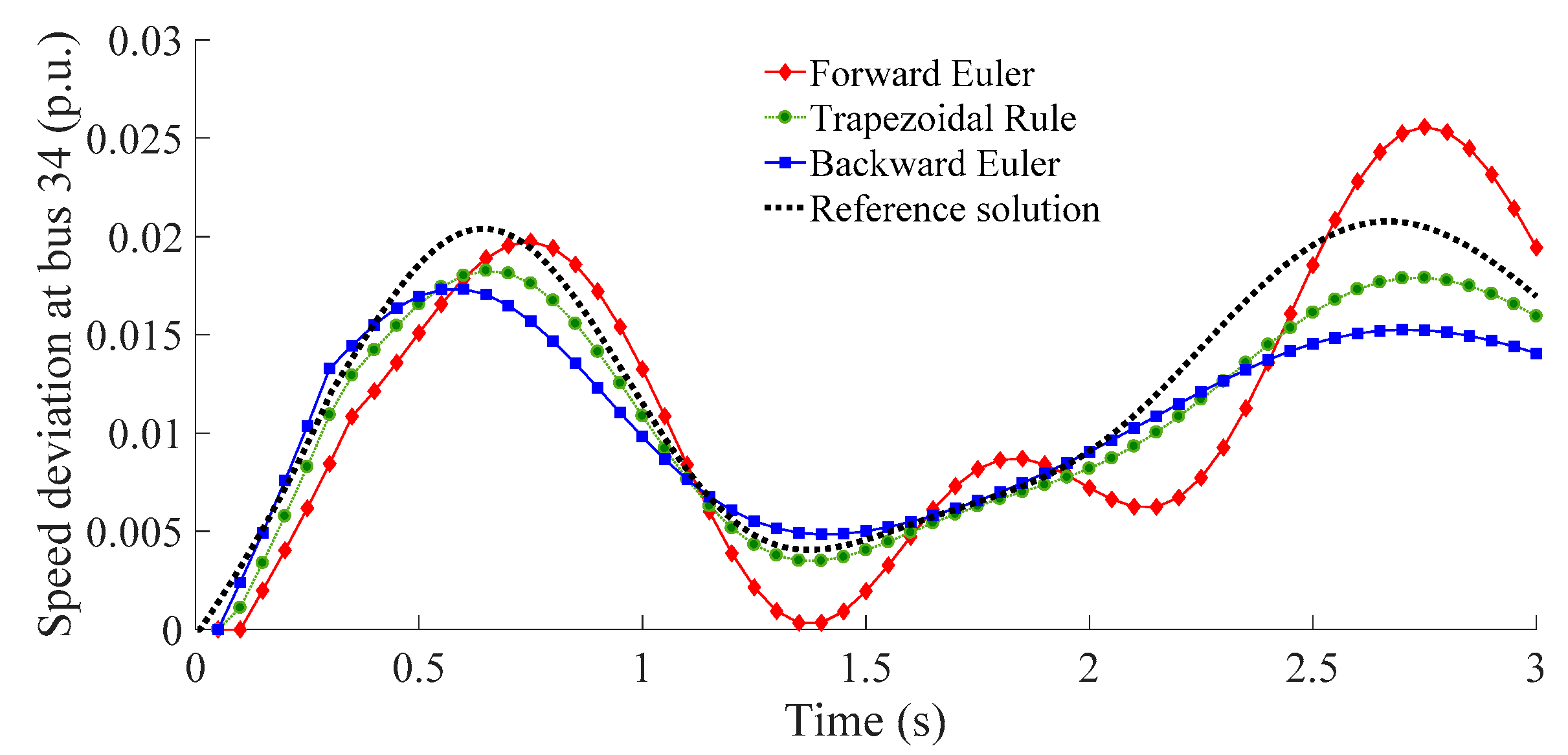
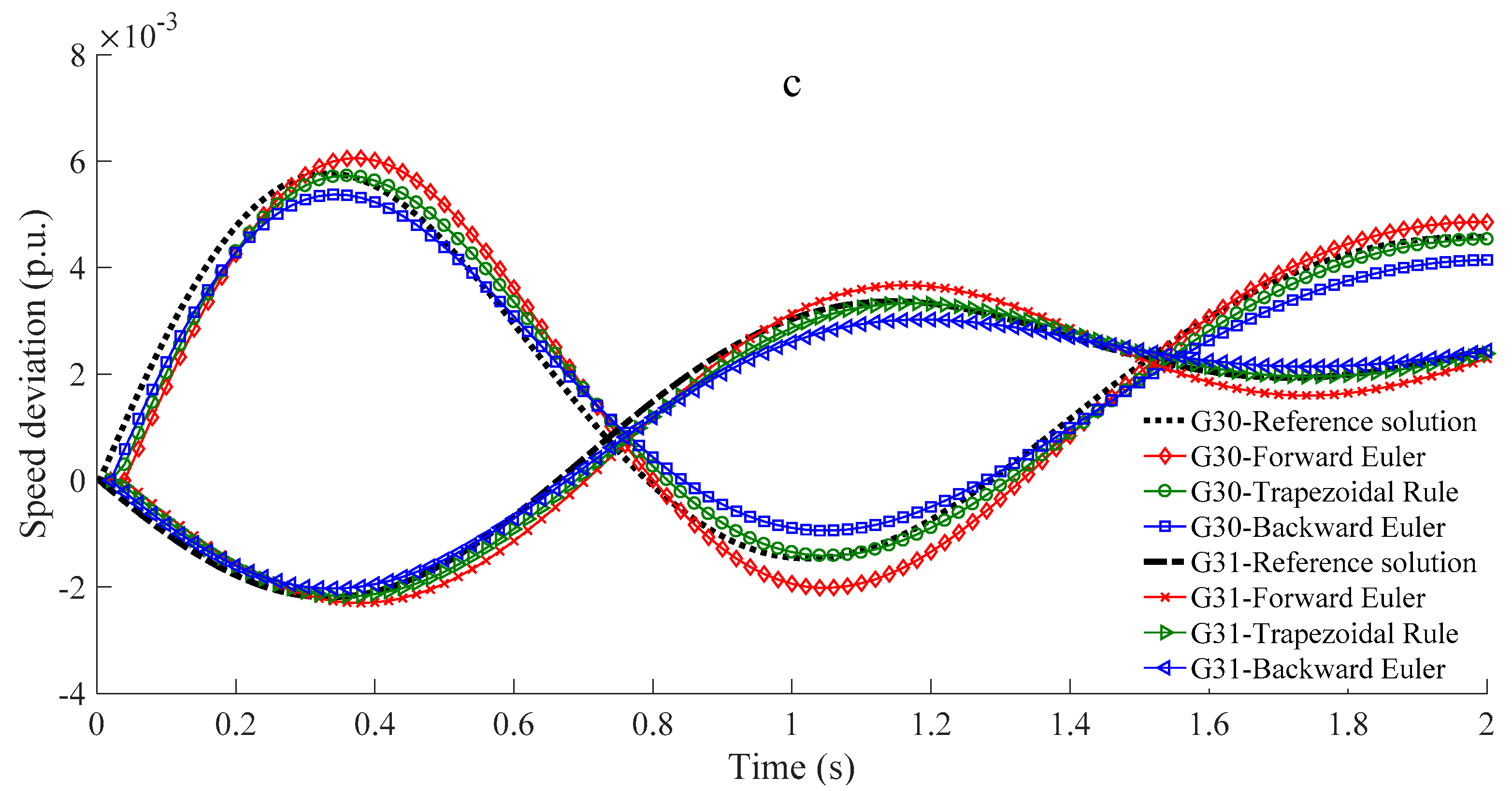
4.1. Comparison between Numerical Integration Methods
4.2. Simulation of Other Disturbances
- The power outage of power plant connected to bus 30 which is injecting 800 MW to the grid
- The loss of the load connected to bus 20 which is the largest of the system and consumes 680 MW.
- The loss of the line connecting buses 2 and 3.
4.3. Generalized Theta Method
4.4. Comparison with RK2 and RK4 Runge-Kutta Methods
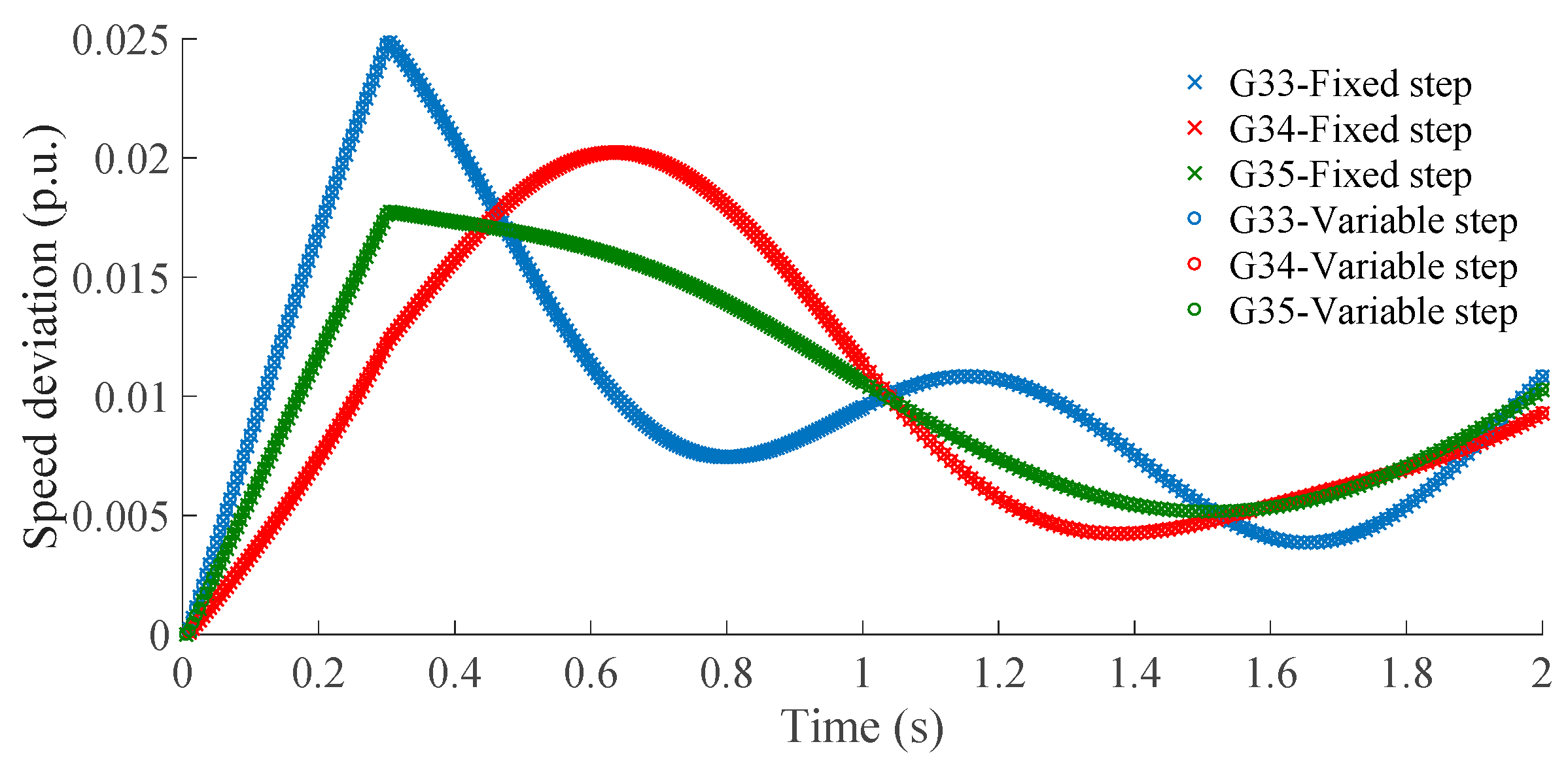
4.5. Effect of the Use of a Variable Integration Time Step
5. Conclusions
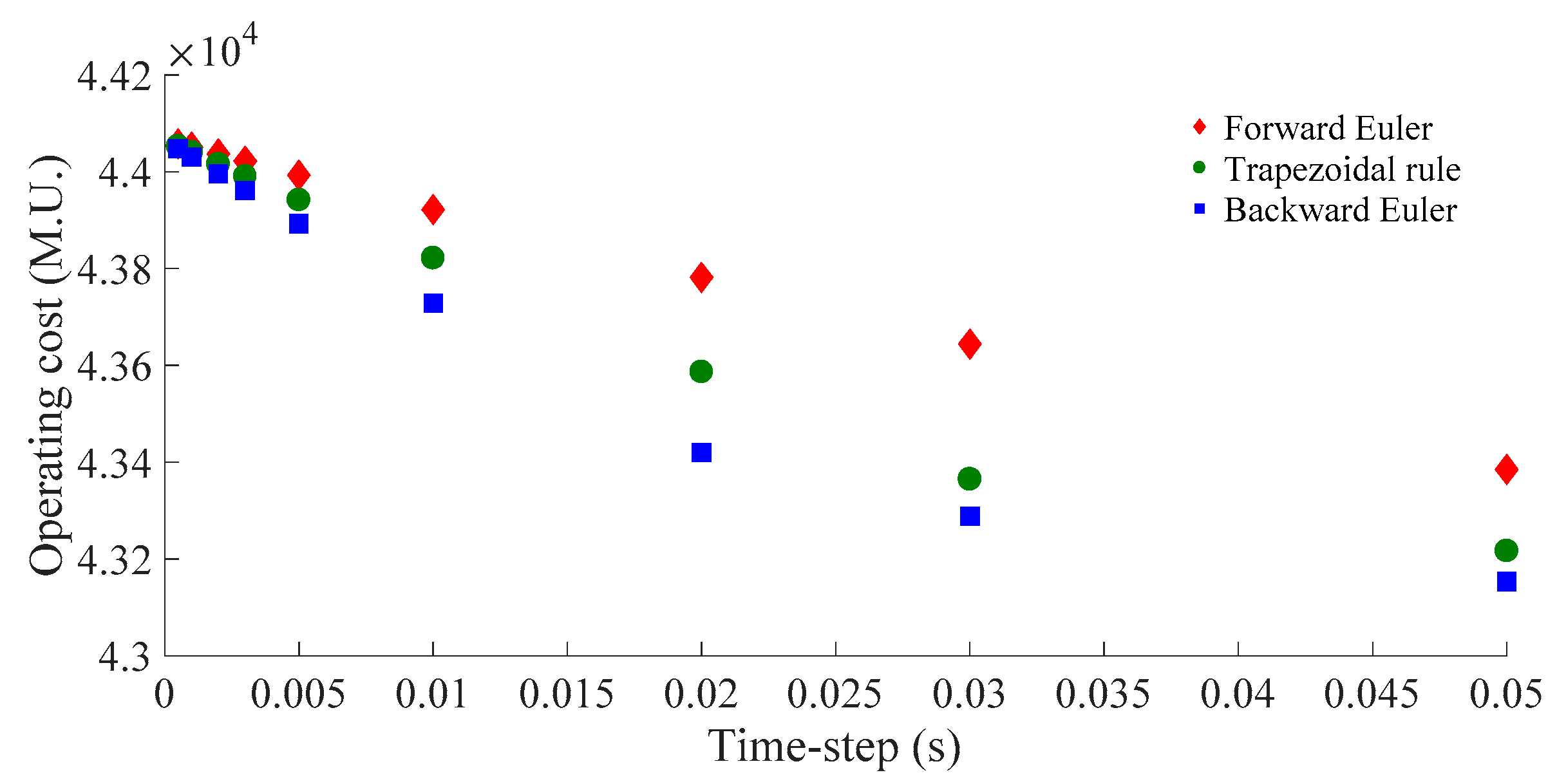
- In terms of convergence, no problems were observed in the studied cases for time steps shorter than 0.05 s. However, the forward Euler method provides results that differ significantly from the reference solution when the integration time step is 0.05 s and fails to converge if larger integration steps are used. As expected, the numerical stability of the forward Euler method is known to be poor compared to implicit integration methods. Although the forward Euler method is viable in the studied case, in other cases numerical stability could be a problem depending on the stiffness of the set of differential-algebraic equations representing the dynamics of the power system.
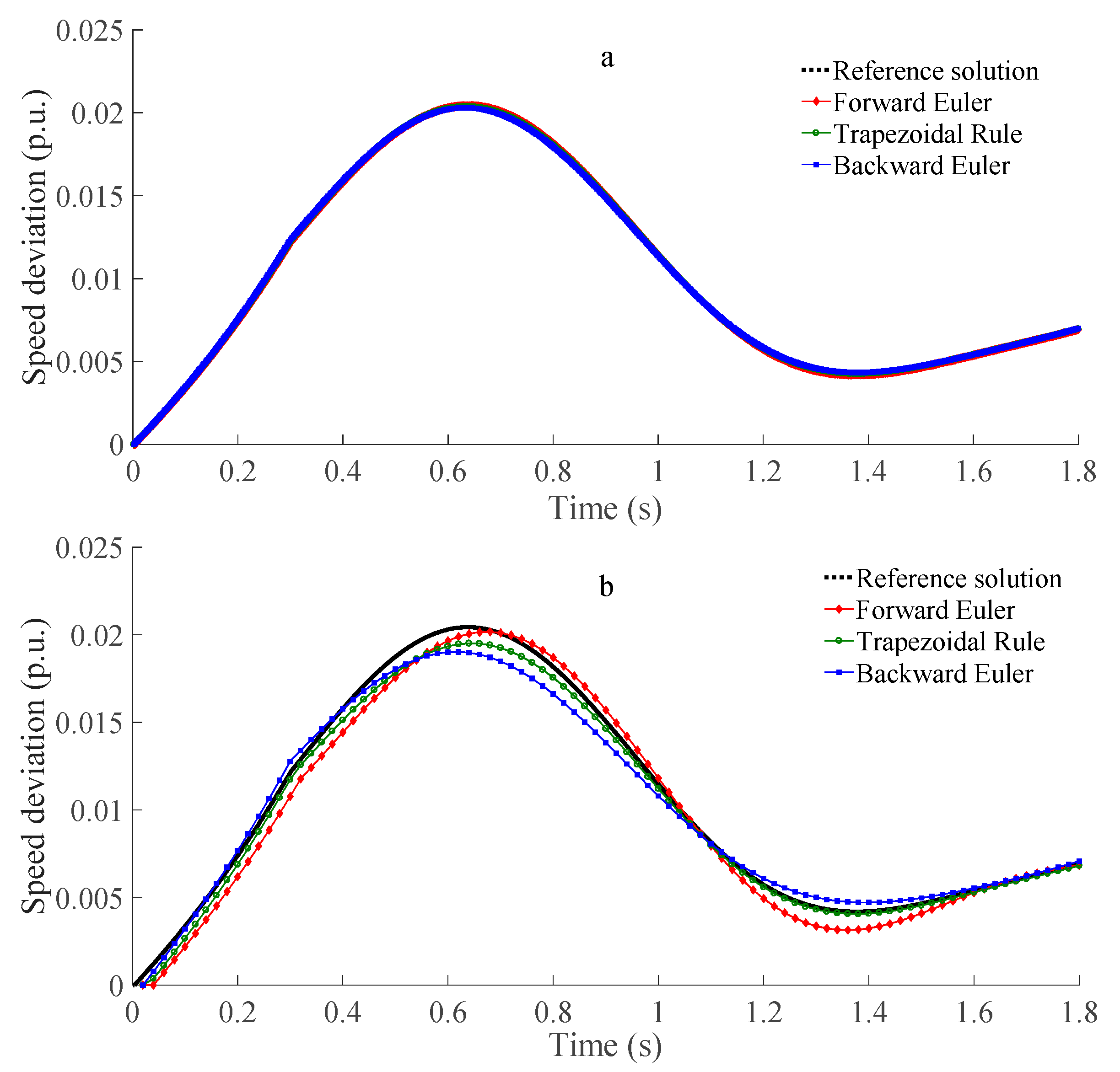
- In terms of the numerical solution, it has been found that the backward Euler method and, in less degree, the trapezoidal rule, tend to damp the electromechanical oscillations. This effect increases with the length of the integration time step and can lead to dispatches that produce unstable cases in the real world. Operators assessing the stability of a system should be aware of this effect, and perhaps compensate it by introducing a security margin in the dynamic constraints of the optimization model.
- In terms of the speed of convergence, the trapezoidal rule or, more exactly, any generalized Theta method with values of Theta larger than zero and smaller than one, has been found to be faster than the forward and the backward Euler methods.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Abbreviations | |
| COI | Center of Inertia |
| GAMS | General Algebraic Modeling System |
| OPF | Optimal Power Flow |
| PF | Pre-Fault |
| PSSE | Power System Simulator for Engineering |
| RK2 | 2nd order Runge-Kutta method. |
| RK4 | 4th order Runge-Kutta method. |
| TD | Time Domain |
| TSCOPF | Transient Stability Constrained Optimal Power Flow. |
| Indices and sets | |
| i,j | Indices for nodes. |
| t | Indices for time periods. |
| Set of buses of the power system. | |
| Set of the synchronous generation units. | |
| Set of loads | |
| Set of the time periods corresponding to the pre-fault, fault and post fault stages. | |
| Set of the time periods corresponding to the fault and post fault stages. | |
| Parameters | |
| Fuel cost coefficients of the power plants. | |
| Active power coefficients of the ZIP load model. | |
| Reactive power coefficients of the ZIP load model. | |
| Damping coefficient of the power plant [p.u.]. | |
| Limits of the field voltage of the synchronous generator [p.u.]. | |
| Inertia constant of the power plant [s]. | |
| Upper limit of the current in lines and transformers. [p.u.]. | |
| Active and reactive nominal load [p.u.]. | |
| Active power limits of the generator [p.u.]. | |
| Reactive power limits of the generator [p.u.]. | |
| Armature resistance [p.u.]. | |
| Generator transient time constants[s]. | |
| Parameter that defines the numerical integration method. | |
| Limits of the bus voltage [p.u.]. | |
| Synchronous reactances of the power plant [p.u.]. | |
| Transient synchronous reactances of the power plant [p.u.]. | |
| Absolut value of the element (i,j) of the bus admittance matrix [p.u.]. | |
| Integration time step [s]. | |
| Phase of the element (i,j) of the bus admittance matrix [p.u.]. | |
| Frequency reference | |
| Limit of the rotor angle deviation [rad]. | |
| Variables | |
| Internal transient voltages of the synchronous generator [p.u.]. | |
| Field voltage of the synchronous generator [p.u.]. | |
| Output current d-q components of the synchronous generator [p.u.]. | |
| Current between nodes (i,j) [p.u.]. | |
| Intermediate variables for the calculation of the transient voltage in the d-axis when using the RK4 method | |
| Electrical power in the rotor of the synchronous generator [p.u.] | |
| Active and reactive power output of the synchronous generator [p.u.]. | |
| Active and reactive load | |
| Mechanical power input of the power plant [p.u.]. | |
| Bus voltage magnitude [p.u.]. | |
| Speed deviation of the synchronous generator [rad/s]. | |
| Phase of the bus voltage [rad]. | |
| Rotor angle [rad]. | |
| Rotor angle of the center of inertia [rad]. |
References
- Abhyankar, S.; Geng, G.; Anitescu, M.; Wang, X.; Dinavahi, V. Solution techniques for transient stability-constrained optimal power flow—Part I. IET Gener. Transm. Distrib. 2017, 11, 3177–3185. [Google Scholar] [CrossRef]
- Geng, G.; Abhyankar, S.; Wang, X.; Dinavahi, V. Solution techniques for transient stability-constrained optimal power flow—Part II. IET Gener. Transm. Distrib. 2017, 11, 3186–3193. [Google Scholar] [CrossRef]
- Capitanescu, F.; Martinez Ramos, J.L.; Panciatici, P.; Kirschen, D.; Marano Marcolini, A.; Platbrood, L.; Wehenkel, L. State-of-the-art, challenges, and future trends in security constrained optimal power flow. Electr. Power Syst. Res. 2011, 81, 1731–1741. [Google Scholar] [CrossRef] [Green Version]
- Arredondo, F.; Castronuovo, E.; Ledesma, P.; Leonowicz, Z. Comparative Implementation of Numerical Integration Methods for Transient Stability Constrained Optimal Power Flow. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]
- Sanchez-Gasca, J.J.; D’Aquila, R.; Paserba, J.J.; Price, W.W.; Klapper, D.B.; Hu, I.-P. Extended-term dynamic simulation using variable time step integration. IEEE Comput. Appl. Power 1993, 6, 23–28. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, J.; Xiao, T.; Jiang, D. A Transient Stability Numerical Integration Algorithm for Variable Step Sizes Based on Virtual Input. Energies 2017, 10, 1736. [Google Scholar] [CrossRef]
- Sauer, P.W.; Pai, M.A. Power System Dynamics and Stability; Prentice Hall: Upper Saddle River, NJ, USA, 1998; Volume 51. [Google Scholar]
- Gan, D.; Thomas, R.J.; Zimmerman, R.D. Stability-constrained optimal power flow. IEEE Trans. Power Syst. 2000, 15, 535–540. [Google Scholar] [CrossRef] [Green Version]
- Ledesma, P.; Arredondo, F.; Castronuovo, E.D. Optimal Curtailment of Non-Synchronous Renewable Generation on the Island of Tenerife Considering Steady State and Transient Stability Constraints. Energies 2017, 10, 1926. [Google Scholar] [CrossRef]
- Zarate-Minano, R.; Van Cutsem, T.; Milano, F.; Conejo, A.J. Securing Transient Stability Using Time-Domain Simulations Within an Optimal Power Flow. IEEE Trans. Power Syst. 2010, 25, 243–253. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Q.; Huang, Z. An Enhanced Numerical Discretization Method for Transient Stability Constrained Optimal Power Flow. IEEE Trans. Power Syst. 2010, 25, 1790–1797. [Google Scholar] [CrossRef]
- Arredondo, F.; Ledesma, P.; Castronuovo, E.D. Optimization of the operation of a flywheel to support stability and reduce generation costs using a Multi-Contingency TSCOPF with nonlinear loads. Int. J. Electr. Power Energy Syst. 2019, 104, 69–77. [Google Scholar] [CrossRef]
- Weckesser, T.; Jóhannsson, H.; Østergaard, J. Impact of model detail of synchronous machines on real-time transient stability assessment. In Proceedings of the 2013 IREP Symposium Bulk Power System Dynamics and Control—IX Optimization, Security and Control of the Emerging Power Grid, Rethymno, Greece, 25–30 August 2013; pp. 1–9. [Google Scholar]
- Tu, X.; Dessaint, L.; Kamwa, I. A global approach to transient stability constrained optimal power flow using a machine detailed model. Can. J. Electr. Comput. Eng. 2013, 36, 32–41. [Google Scholar] [CrossRef]
- Eberly, D. Stability Analysis for Systems of Differential Equations; 2008. Available online: https://www.geometrictools.com/Documentation/StabilityAnalysis.pdf (accessed on 8 December 2018).
- Milano, F. Power System Modelling and Scripting; Springer: Berlin, Germany, 2010; ISBN 978-3-642-13669-6. [Google Scholar]
- Faragó, I. Convergence and stability constant of the theta-method. Appl. Math. 2013, 2013, 42–51. [Google Scholar]
- Milano, F. An Open Source Power System Analysis Toolbox. IEEE Trans. Power Syst. 2005, 20, 1199–1206. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-hill: New York, NY, USA, 1994. [Google Scholar]
- GAMS—Cutting Edge Modeling. Available online: https://www.gams.com/ (accessed on 6 March 2018).
- IPOPT. Available online: https://projects.coin-or.org/Ipopt (accessed on 6 March 2018).
- IPOPT and IPOPTH. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.589.5002&rep=rep1&type=pdf (accessed on 28 March 2018).
- Power Flow Cases—Illinois Center for a Smarter Electric Grid (ICSEG). Available online: http://icseg.iti.illinois.edu/power-cases/ (accessed on 28 March 2018).
- Ledesma, P.; Calle, I.A.; Castronuovo, E.D.; Arredondo, F. Multi-contingency TSCOPF based on full-system simulation. IET Gener. Transm. Distrib. 2017, 11, 64–72. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network and load modeling | Equality constraints | PF | TD |
| Power flow Equations (2) and (3) | Χ | Χ | |
| Angle reference (4) | Χ | - | |
| Load Equations (6) and (7) | Χ | Χ | |
| Currents in branches and transformers (8) | Χ | - | |
| Inequality constraints | PF | TD | |
| Voltage limits at buses (5) | Χ | - | |
| Active and reactive power generation limits (5) | Χ | - | |
| Maximum currents through branches and transformers (9) | Χ | - | |
| Power plant modeling | Equality constraints | PF | TD |
| Discretized differential equations of power plants (14)–(17) | - | Χ | |
| Initialization of the differential Equations (18)–(21) | Χ | - | |
| Power plant static Equations (22)–(26) | Χ | Χ | |
| Inequality constraints | PF | TD | |
| Field voltage limits (27) | Χ | Χ | |
| Stability Limits | Equality constraints | PF | TD |
| Calculation of the center of inertia (28) | Χ | Χ | |
| Inequality constraints | PF | TD | |
| Rotor angle deviation limits (29) | Χ | Χ |
| 0.0005 | 0.001 | 0.002 | 0.003 | 0.005 | 0.01 | 0.02 | 0.05 | |
|---|---|---|---|---|---|---|---|---|
| Equations | 680,071 | 340,071 | 170,071 | 113,291 | 68,071 | 34,071 | 17,071 | 6871 |
| Variables | 600,030 | 300,030 | 150,030 | 60,030 | 30,030 | 15,030 | 9930 | 6030 |
| Forward Euler | ||||||||
| Time (s) | 4211 | 796 | 394 | 188 | 157.6 | 23.48 | 9.95 | 2.84 |
| Time/Equations | 6.2 × 10−3 | 2.3 × 10−3 | 2.3 × 10−3 | 1.7 × 10−3 | 2.3 × 10−3 | 7 × 10−4 | 6 × 10−4 | 4 × 10−4 |
| Time/Variables | 7 × 10−3 | 2.7 × 10−3 | 2.6 × 10−3 | 1.9 × 10−3 | 2.6 × 10−3 | 8 × 10−4 | 7 × 10−4 | 5 × 10−4 |
| Trapezoidal Rule | ||||||||
| Time (s) | 3799 | 774 | 184 | 176 | 69.3 | 17.7 | 7.85 | 2.83 |
| Time/Equations | 5.6 × 10−3 | 2.3 × 10−3 | 1.1 × 10−3 | 1.6 × 10−3 | 1 × 10−3 | 5 × 10−4 | 4.6 × 10−4 | 4 × 10−4 |
| Time/Variables | 6.3 × 10−3 | 2.6 × 10−3 | 1.2 × 10−3 | 1.8 × 10−3 | 1.2 × 10−3 | 5.9 × 10−4 | 5.2 × 10−4 | 4.7 × 10−4 |
| Backward Euler | ||||||||
| Time (s) | 5739 | 1055 | 537 | 289 | 116 | 18 | 7.97 | 2.94 |
| Time/Equations | 8.4 × 10−3 | 3.1 × 10−3 | 3.2 × 10−3 | 2.6 × 10−3 | 1.7 × 10−3 | 5.3 × 10−4 | 4.7 × 10−4 | 4.3 × 10−4 |
| Time/Variables | 9.6 × 10−3 | 3.5 × 10−3 | 3.6 × 10−3 | 2.9 × 10−3 | 1.9 × 10−3 | 6 × 10−4 | 5.3 × 10−4 | 4.9 × 10−4 |
| Method | Forward Euler | Trapezoidal Rule | Backward Euler | Runge Kutta 2 | Runge Kutta 4 |
|---|---|---|---|---|---|
| Number of variables | 150,030 | 150,030 | 150,030 | 459,950 | 619,870 |
| Number of constraints | 170,071 | 170,071 | 170,071 | 499,991 | 659,911 |
| Number of iterations | 50 | 49 | 56 | 55 | 54 |
| CPU time (s) | 404 | 347 | 451 | 1463 | 1438 |
| Size | Fixed Step | Variable Step | ∆Size (%) | ||
| Equations | 68,071 | 51,071 | −24.97 | ||
| Variables | 60,030 | 45,030 | −24.99 | ||
| Method | Cost (M.U.) | Convergence (s) | Cost (M.U. 1) | Convergence (s) | ∆Convergence (%) |
| F. Euler | 43,993 | 157.708 | 43,960 | 32.359 | −79.48 |
| T. rule | 43,942 | 69.289 | 43,942 | 29.033 | −58.10 |
| B. Euler | 43,893 | 116.569 | 43,925 | 29.947 | −74.31 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arredondo, F.; Castronuovo, E.D.; Ledesma, P.; Leonowicz, Z. Analysis of Numerical Methods to Include Dynamic Constraints in an Optimal Power Flow Model. Energies 2019, 12, 885. https://doi.org/10.3390/en12050885
Arredondo F, Castronuovo ED, Ledesma P, Leonowicz Z. Analysis of Numerical Methods to Include Dynamic Constraints in an Optimal Power Flow Model. Energies. 2019; 12(5):885. https://doi.org/10.3390/en12050885
Chicago/Turabian StyleArredondo, Francisco, Edgardo Daniel Castronuovo, Pablo Ledesma, and Zbigniew Leonowicz. 2019. "Analysis of Numerical Methods to Include Dynamic Constraints in an Optimal Power Flow Model" Energies 12, no. 5: 885. https://doi.org/10.3390/en12050885
APA StyleArredondo, F., Castronuovo, E. D., Ledesma, P., & Leonowicz, Z. (2019). Analysis of Numerical Methods to Include Dynamic Constraints in an Optimal Power Flow Model. Energies, 12(5), 885. https://doi.org/10.3390/en12050885