1. Introduction
In the past few decades, the usage of distributed energy resources (DERs) has attracted a significant amount of attention due to their sustainability and environmental friendliness [
1,
2]. It is notable that the natural characteristics of power generation by DERs, e.g., wind turbine generators (WTs) and photovoltaic panels (PVs), are heavily weather-dependent and over-flexible, which has a significant impact on the accessed conventional power systems [
3]. Meanwhile, the convergence of multiple energy resources is the current development trend of future energy systems [
4]. For conventional power grids, being able to access renewable energy sources would create challenges in the operation of power grids with conventional power regulation modes, which is why solar power and wind power were previously regarded as ‘waste energy’. To further promote the efficiency of multi-energy conversion and utilization, the architecture of energy internet (EI) is proposed as being the future of the smart grid [
5].
EI is a cyber-physical system inspired by the concept of the Internet, enabling the bidirectional power transmission and on-demand rational energy utilization [
6]. Within the scenario of future EI, solar power, wind power and hydro power can be viewed as the main power generation sources, which can be integrated with energy storage devices and various loads. Typically, EI is composed of a utility grid and multiple microgrids (MGs) interconnected via energy routers (ERs). ERs are the core infrastructures of EI systems. The ER, also known as an electric energy router or power router, is a type of electric device that can realize multidirectional power flow and active control of the power flow. In the distribution network, acting as an intelligent interface of distributed power supply, reactive power compensation device, energy storage equipment and load, the ER can flexibly manage the dynamic power in the regional grid network and the whole distribution network on the premise of ensuring power quality. Integration with advanced information technology enables ERs to have communication and intelligent decision-making capabilities. ERs can actively manage the energy flow of the power network according to the operation status of the network and the instructions from the user and control center. The basic function of ER includes plug and play of interfaces, bidirectional transmission; real-time communications and so on. For ERs designed for a backbone network, the main difficulty lies in the technology of high voltage power electronic converters. For small and medium-sized ERs, a high manufacturing cost is the reason why it has not been popularized in the market. The current researches in both academia and industry aim to propose ERs for future energy markets. For a more detailed introduction with respect to ER, readers can consult [
6,
7,
8] and the references therein.
As direct current (DC) MGs not only can improve the power quality and transmission capacity of an EI system but also have superior accesses to DERs, they are more widely used in real projects [
9]. Due to the direct influence of power deviation on MG’s DC bus voltage, voltage regulation is usually realized by power control. In an EI scenario, the power balance of the whole system should be achieved by the individual local controllable devices in each MG through prioritizing [
10]. However, when faced with extreme conditions, such as a large-scale load power change, MGs tend to be regulated by means of ER operations, which aim to transmit power energy from/to other MGs in order to achieve power supply–demand balance within the whole EI scenario [
8,
10].
On the other hand, there have been significant achievements in terms of voltage control in related literature, such as [
11,
12,
13,
14,
15,
16]. To illustrate, a local reactive power control scheme that can quickly respond to voltage deviations for preventing communication delay and noise has been previously studied [
11]. In [
12], the authors proposed voltage control strategies to exploit the cooperation among the agents, such that the power loss minimization objective is achieved. An adaptive control approach for DC MG systems, satisfying both accurate power sharing and voltage regulation, has been previously investigated [
13]. Furthermore, a droop-like feedback control method was developed for voltage regulation in [
14], enabling the application of theoretical circuits analytical techniques. In [
15], with techniques introduced in [
17] and the references therein, the problem of voltage regulation is investigated for an islanded MG in EI, which considers system stochasticity and parameter uncertainties.
Naturally, the random change of photovoltaic and wind power as well as the custom of using electricity would stochastically influence PV power output, WT power output and load power, respectively. In [
16] and [
18], the power of PVs, WTs and loads is modelled using ordinary differential equations (ODEs). As an improvement of ODEs, continuous stochastic differential equations (SDEs) driven by Brownian motions have been applied to model deviations in the power input/output of PVs, WTs and loads in [
15,
19,
20]. In [
10] and [
21], the Ornstein-Uhlenbeck process was utilized for the power modelling of power fluctuations for PVs and loads.
On the other hand, there are objective measurement errors for any system parameter. When we consider the short-term dynamical properties of the power system, especially for the problem of MG voltage regulation, there is the need for an accurate power dynamical model. Thus, parameter uncertainty must be considered in the dynamical MG model. There exist a variety of approaches to describe parameter uncertainty, such as [
22,
23]. In this paper, we choose the norm-bounded parameter uncertainty to represent such measurement errors, with the detailed structure introduced in
Section 2.
Furthermore, there exists a communication time delay within the information system of EI [
6,
16]. However, in the aforementioned literature [
11,
12,
13,
14,
15,
16] and the references therein, system stochasticity, parameter uncertainty and communication time delay have not been taken into consideration
simultaneously.
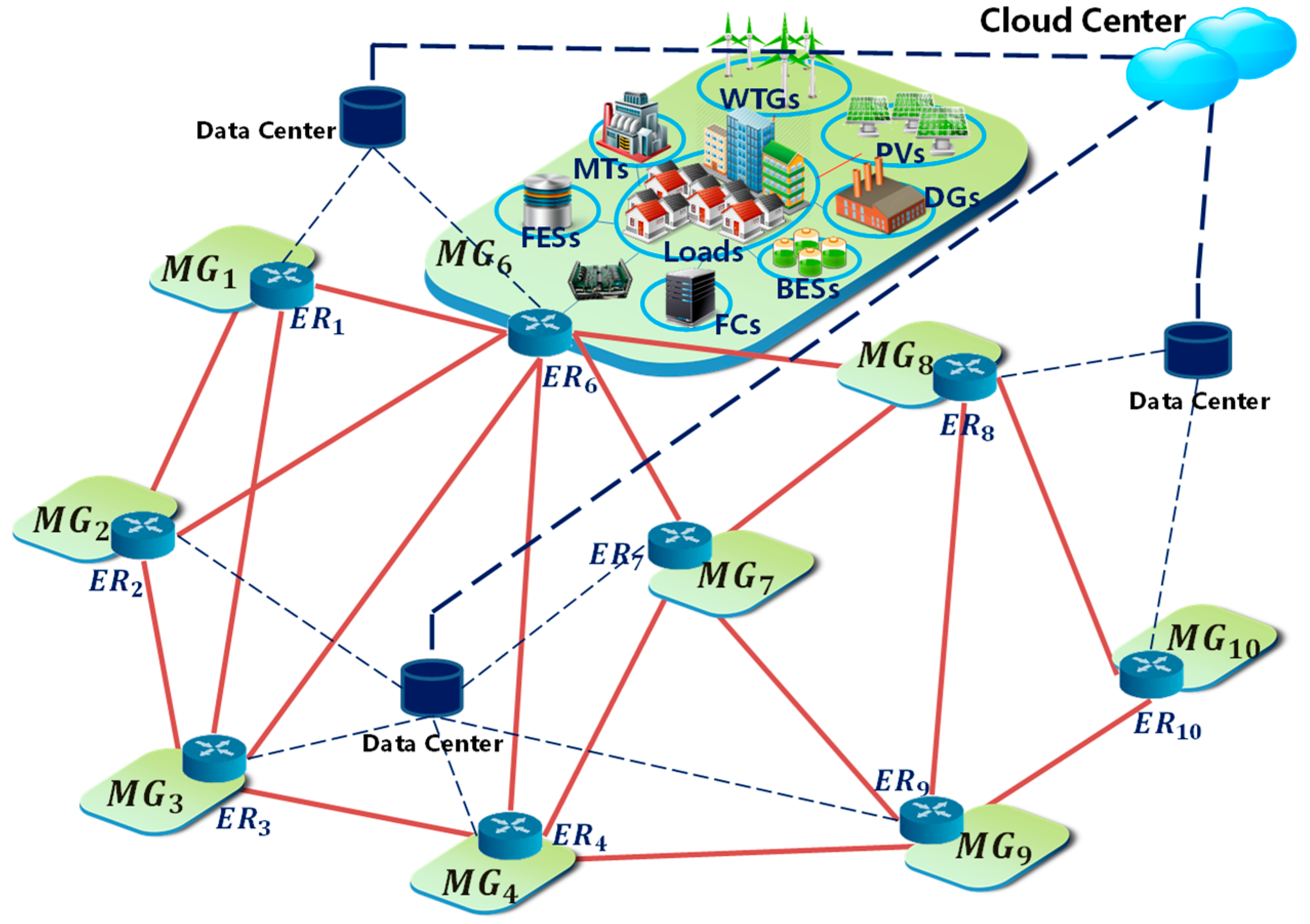
In this paper, it is supposed that the considered EI scenario is disconnected with the main power grid and such an EI consists of multiple DC MGs, which are interconnected via ERs. We assume that each MG is composed of PVs, WTs, loads, micro-turbines (MTs), diesel engine generators (DGs), fuel cells (FCs), battery energy storages (BESs) and flywheel energy storages (FESs). The dynamics of the considered system are modelled as continuous differential equations. Due to the randomness of power output of PVs and WTs as well as the stochasticity in the loads, the power deviations of PVs, WTs and loads are modelled as SDEs. We model the dynamics of MTs, DGs, FCs, BESs, FESs and each MG’s DC bus voltage deviations as ODEs. Parameter uncertainties are considered in the system coefficients, which revealed measurement and modelling errors. In addition, the time delay occurring in the communication system is considered in the dynamical equations of the controllable electrical devices. After this, we formulate the voltage control issues in EI as a robust
control problem. The linear matrix inequality (LMI) approach [
17] is utilized to solve this problem. Furthermore, the problem of over-control has been concerned and extensively studied. The efficacy of the proposed controller is presented in the numerical simulation.
The main contributions and highlights of this paper are outlined as follows.
(1) The assumption that the EI scenario is functioning without access to main power grid makes the control problem more challenging compared to that with access to the utility grid. Each DC MG is analyzed in detail, with the dynamics of the equipment in MGs (including PVs, WTs, loads, MTs, DGs, FCs, BESs, FESs, ERs) being analyzed. The considered EI dynamical system is complex and authentic, which is reflected in the following three aspects. First, corresponding to the fusion of energy and information in EI, the communication time delay is taken into consideration when formulating the dynamical equations of ERs. Second, when investigating the transient power dynamics in MGs, system modelling errors are accounted. Norm-bounded time-varying parameter uncertainty is used to represent such errors. Third, the stochastic nature of solar power, wind power and loads are fully considered and their power dynamical equations are modelled with SDEs. The voltage regulation issue based on this particular system where communication time delay, system parameter uncertainty and system stochasticity are considered simultaneously has not been considered before within the scope of EI.
(2) We emphasize that our contribution is on modelling and formulating the engineering problem in EI into control issues that we can solve. It is challenging to determine how to transform our considered physical problem in an EI scenario into a control problem itself. The practical voltage regulation problem is converted into a robust control problem in the time domain. The LMI approach is utilized to solve such a control problem sufficiently in order to achieve both robust stabilization against system internal uncertainty and performance against external disturbance input.
(3) Based on the sufficient solutions to the robust voltage regulation issue, an additional constraint regarding the size of controllers was considered, such that the potential over-control for distributed power generators would be effectively avoided. Furthermore, the problem of finding a balance between the voltage regulation performance and the constraints for the controllers has been extensively studied, which has not been considered before. Comparable numerical simulations are performed, demonstrating the effectiveness of the proposed control approach.
The rest of the paper is organized as follows.
Section 2 introduces the ER system modelling. Problem formulation and solutions are given in
Section 3. In
Section 4, numerical examples are illustrated.
Section 5 concludes the paper.
3. Problem Formulation and Solution
In this section, the voltage regulation problem for the considered EI system is formulated as a robust stochastic control issue. To avoid drastic voltage deviation in MGs, the desired controllers in MTs, DGs, FCs and ERs are sufficiently solved using the robust control method. Since the obtained sufficient solutions might be too strong, it is possible that the situation of over-control regarding MTs, DGs, FCs and ERs might occur. Thus, some extra constraints for the controllers are proposed in this section in order to successfully avoid the situation of over-control.
3.1. The Mathematical Formulation of EI Dynamical System
Next, the EI system power dynamics is represented with a unified dynamical system, which is introduced as follows. For simplicity, we assume that
, which would not lead to significant changes to the considered problem. The similar assumptions are applied in many works, such as [
15].
For the
th MG, the system state is denoted as the vector
, which is defined in (8):
Similarly, for , the disturbance input vector and control input vector are denoted as respectively.
Based on the adjacency matrix
, the connections between ERs can be described with two tuples. Suppose that there are a total of
transmission lines in the EI system, we denote the set of the two tuples as
We denote the elements in
as
, such that the state vector
, control input vector
and disturbance input vector
for ERs can be denoted as:
respectively. In this sense, we are able to denote the EI system state variable
, control input
and disturbance input
of the entire EI system as:
At time
, the voltage deviations
within
MGs in EI are denoted as
As the dynamical equations in (1)–(5) are expressed in linear forms, the EI dynamical system can be rewritten into the following explicit form:
where
is the initial state. The matrix coefficients in (11) are obtained by:
with appropriate dimensions. It is assumed that the bounded time-varying uncertainty matrices in (12) satisfies:
where
,
,
and
are real constant matrices while
is an arbitrary time-varying matrix function satisfying:
It is notable that the above structure for parameter uncertainties has been used in many works in the field of power systems, such as [
15]. Hence, the dynamic system for the considered EI scenario has been explicitly obtained.
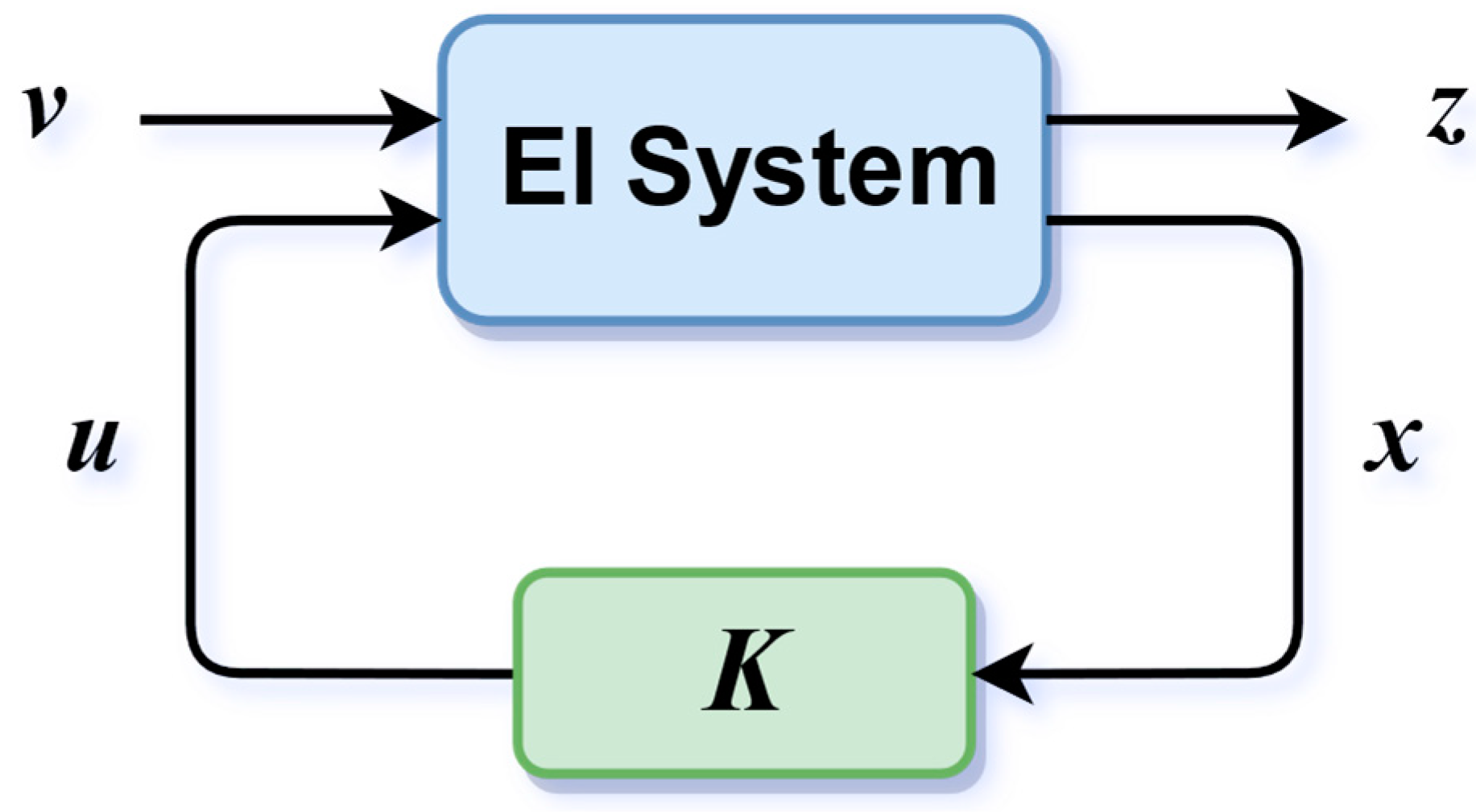
Based on the system modeling given above, a general
control configuration for the voltage regulation problem considered in this paper is shown in
Figure 2. The main target of the remainder of this paper is to develop a type of state feedback controller
, such that the controlled output
, i.e., the voltage deviations, could be properly restricted in order to remove any influence from the unmodeled disturbance input
.
3.2. Robust Performance
For the considered EI system, the so-called robust performance particularly refers to the good regulation of the voltage in each MG with respect to two properties: 1) EI system’s internal parameter uncertainty; and 2) external disturbance input from solar irradiation, wind power change, change of electricity usage and disturbing power transmission from other interconnected ERs. Mathematically, we provide a definition of robustly stable (or equivalently, robust stability) for the EI system (11) as follows.
Definition 1: For dynamical EI system (11), the controlled system with disturbance inputis said to be robustly stable if for all bounded time-varying parameter uncertainties,,in forms of (13),holds. This property is called robust stability. The notationrefers to the Euclidean norm.
In addition to the property of robust stability against EI system’s internal parameter uncertainty, the impact of the disturbance input on voltage deviation should be restricted within certain level, which corresponds to the robust performance in the control theory. The robust performance for the investigated EI system is defined in Definition 2.
Definition 2: For dynamical EI system (11), with a controllerunder a disturbance attenuation level, if the controlled EI dynamical system (11) is robustly stable under Definition 1 for all time-varying parameter uncertainties,,,in forms of (11) and ifholds for all nonzero, wherethe robustperformance for the considered EI system is said to be achieved.
The definitions of robust stability and robust
performance introduced above originate from the robust
control theory in the time domain, such as [
29]. Following this, the robust
control theory can be applied to obtain the desired controllers. A theorem below is provided to solve our voltage regulation problem.
Theorem 1: System (11) is robustly stabilized by the linear state-feedback controllerunder the given disturbance attenuation factorif there exist symmetric matrices,, matrixand a scalar, such that the LMI in (15) holds:whereis defined in (16),inis given in (17). The EI dynamical system (11) is a special form of the system equation analyzed in [
29]. Our obtained theorem can be viewed as a special form of the results in [
29]. Thus, the proof is omitted.
The controller obtained from Theorem 1 can be successfully applied to the real-world EI system with guaranteed performance and robustness property. From Definition 2, we can determine that the performance of voltage regulation in the EI system is directly related to the disturbance attenuation level . The controller obtained with a smaller disturbance attenuation level ensures better regulation effect against the disturbances in the EI system.
3.3. Constraints for the Controllers
In [
29], it is pointed out that the obtained robust
controllers are sufficient solutions rather than both necessary and sufficient ones, which means that the controller might be excessively strong when a satisfactory robust
performance is achieved. In real engineering practice, voltage stabilization is the main concern in some cases. In order to achieve better power quality, strong controllers are necessary. In some other cases, the magnitudes of the feedback gains should be restricted to avoid the situation of over-control, which might potentially damage the controllable electrical devices.
Thus, in addition to the robust controllers obtained in Theorem 1, it is necessary to set some constraints in the controllers. Meanwhile, finding a balance between the voltage regulation performance and the constraints for the controllers is still an open problem for the studied system (11), which is investigated below.
Generally, we can manually set the value of disturbance attenuation level
in some applications. The controllers obtained from any feasible solution to (15) can satisfy normal operation requirements in EI systems. However, we would occasionally like to find a controller with the smallest
, such that the impacts on DC bus voltages from the disturbance inputs of the EI system can be minimized. This could be achieved by solving the problem in (18):
Supposing the solution to (18) is , the controller that corresponds to is obtained with With , the voltage in the EI system (11) should be more stable than that under Theorem 1.
However, a smaller disturbance attenuation level usually suggests larger magnitude of the controller’s feedback gain, which might not be appropriate in real EI scenarios. A feedback controller with large feedback gain might lead to violent adjustments for the distributed generators, which would lead to potential damages. To avoid the situation of over-control, the magnitude of feedback gain needs to be restricted. With Schur complement lemma, it is apparent that:
where
is a symmetric matrix. After this, we have
where
(
) stands for the
-norm. As that the feedback gain
obtained from Theorem 1 satisfies
,
is established. By minimizing the upper bound for the feedback gain
, the intensity of the obtained controller would be consequently restricted, which would reduce the requirement of the proposed controller in practical applications.
Thus, with the idea to minimize
and the LMIs in (15) and (19), we are able to construct a new convex optimization problem as follows:
where
is a positive scalar and
is a scalar satisfying
.
Here, we denote the controller corresponding to the solution to (20) as
. The solutions to problem (18) and (20) can be obtained with the convex optimization toolbox CVX [
30].
4. Numerical Simulation
In this section, the numerical simulations of system (11) is presented to show the efficacy and feasibility of the methods proposed in this paper.
For illustrative purposes, an EI system (without access to utility grid) with four MGs and four ERs is investigated in the following simulation. The considered MGs and ERs are denoted as , , , , , , and , respectively.
Let us define the element of matrix as the connectivity between and . In this sense, when is connected with via ERs, and otherwise.
The adjacency matrix for the considered EI system is shown as follows:
Some typical values of time constants and other system parameters in (11) are provided in
Table 1. Readers may refer to [
15,
16,
18] for typical MG system parameters. During the simulation, EI system parameters are randomly generated using the product of corresponding parameters in
Table 1 and a random variable, which follows the uniform distribution in
. To illustrate, the time constants for PVs in these four MGs are 1.9 times the four identically individually distributed random variables within
. The time period for simulation is set as
(time unit second omitted). The infinity-norm of the parameter uncertainty
,
and
in system (11) is assumed to be less than 0.05. For the time delay
in (11), the constant
is assigned as 0.3. For problem (20),
is set to be 10,000. The 2-norm is used to calculate the induced norm for matrices
and
. In this sense, we have
.
Based on the dynamical models introduced in
Section 2 and the parameters described above, we are able to obtain the parameter matrices in system (11). Both of the solutions to problems (18) and (20) are obtained with the CVX toolbox [
29] in MATLAB (R2018b, MathWorks Inc., Natick, MA, USA) environment.
In order to achieve notation simplicity, let us denote the desired controllers solved by problems (18) and (20) as
and
, respectively. When solving problems (18) and (20), the dimensions of the obtained matrices
,
are rather large, which are inconvenient to be explicitly presented in this paper. To show the differences between the solutions to problems (18) and (20), some of the solutions are given in
Table 2.
In order to show the efficacy of the proposed controllers more intuitively, a detailed analysis is provided as follows.
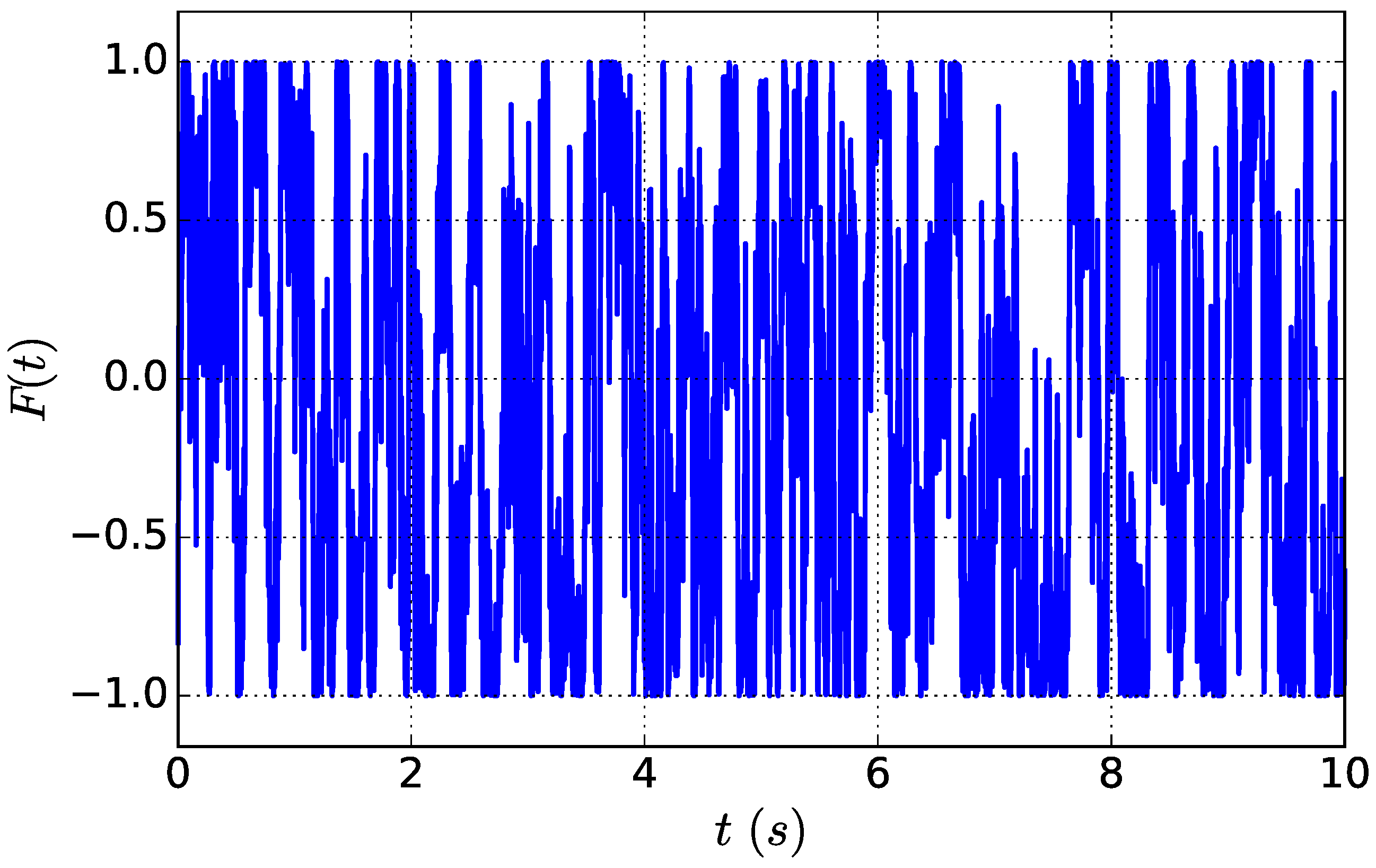
The time delay
and the factor
for parameter uncertainties during the simulation period are plotted in
Figure 3 and
Figure 4, respectively. Basically, the time delay is randomly generated based on the constraints
For the sake of simplicity, the factor
is generated as a random variable located in
.
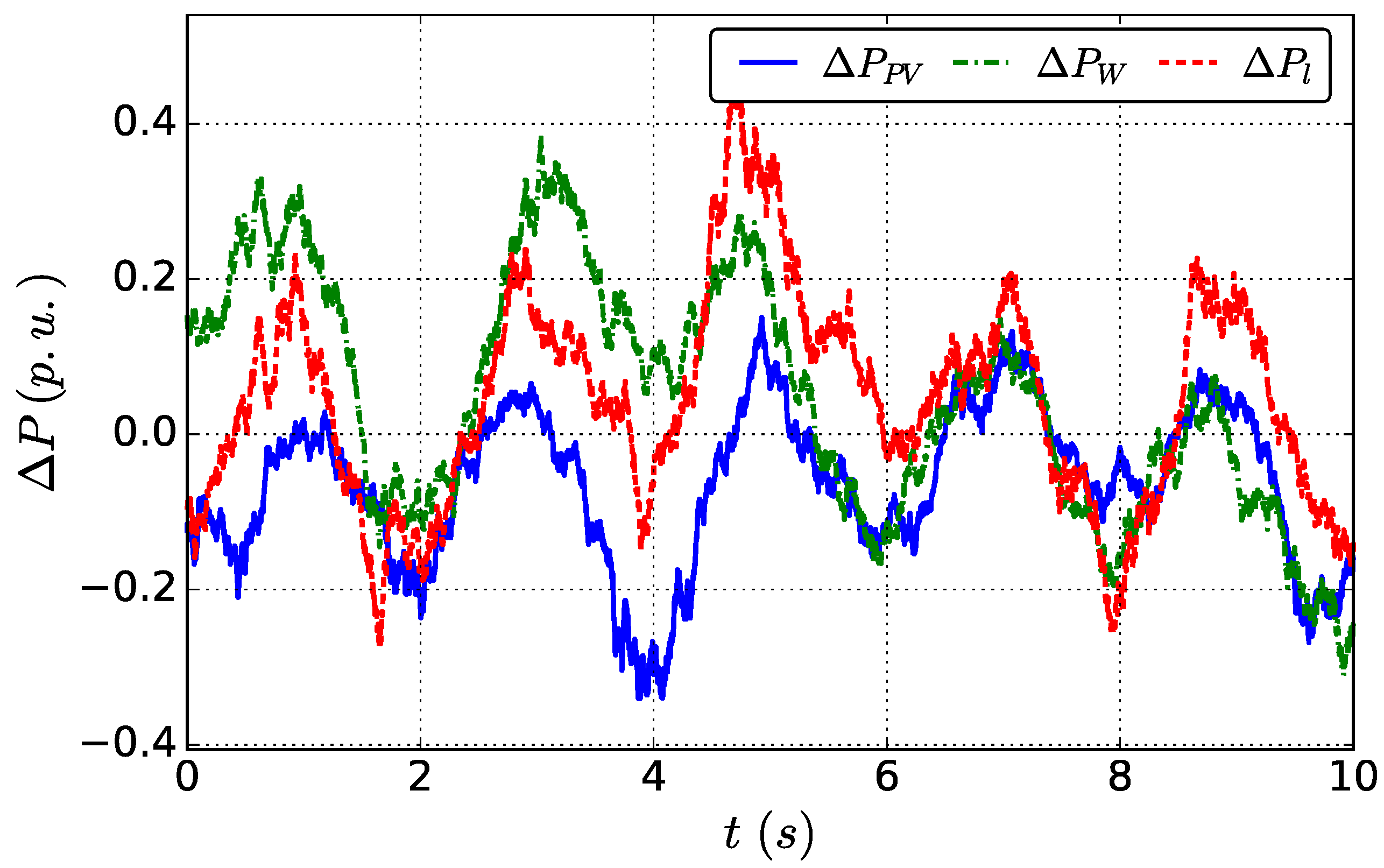
For illustrative purposes, we plot the power deviations of PVs, WTs and loads in
in
Figure 5. It is clear that the stochastic power characteristics of PVs, WTs and loads are properly approximated.
Based on the curve of time delay , factor for parameter uncertainties and dynamics of PVs, WTs and loads, we are able to evaluate the effectiveness of the controllers obtained from problems (18) and (20) as follows.
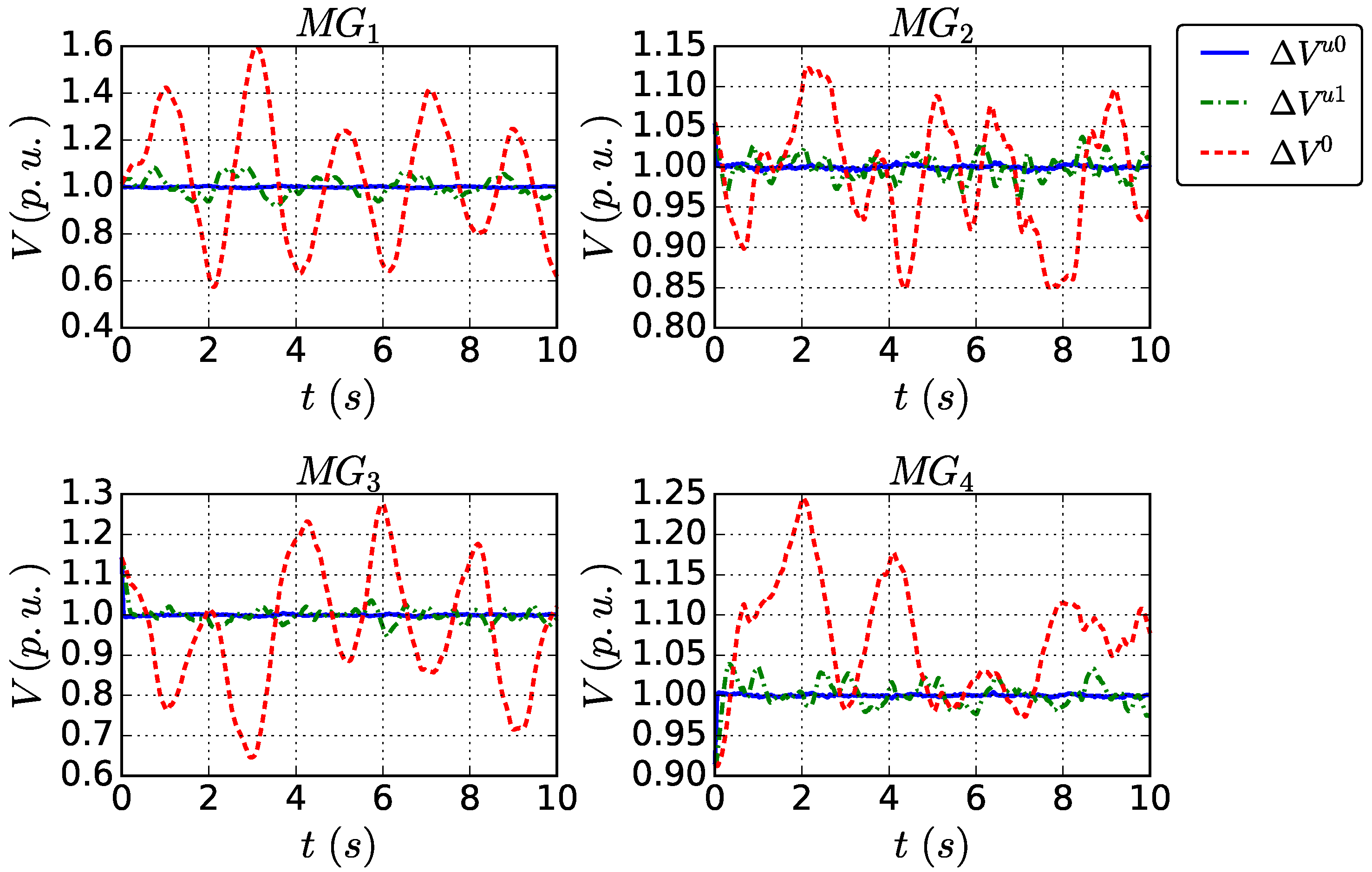
The voltage deviations in four MGs are illustrated in
Figure 6. The dashed red curves in
Figure 6 refer to the dynamics of voltage deviations when there is no controller applied to the EI system. The dynamics of voltage deviations in the four MGs under
and
are illustrated with solid blue lines and dashed–dotted green lines, respectively. As stated above, BESs and FESs in MGs are treated as uncontrollable devices. The power deviation in MGs can be absorbed by BESs and FESs. Thus, even if no controller is applied, the voltage deviations in MGs can still be restricted to lie within a relatively small level. However, with the cooperation of generators and ERs, better voltage regulation can be achieved.
In
Figure 6, it is obvious that when there is no controller applied, the voltage deviations in MGs are relatively larger. We can also find that both
and
can effectively achieve the voltage stabilization target. The voltage is further stabilized under
, which is consistent with the values for disturbance attenuation
in
Table 2. Actually, the disturbance attenuation factor corresponding to
is the smallest one that can be achieved with the proposed method. Thus, the stability achieved by
is no doubt most excellent.
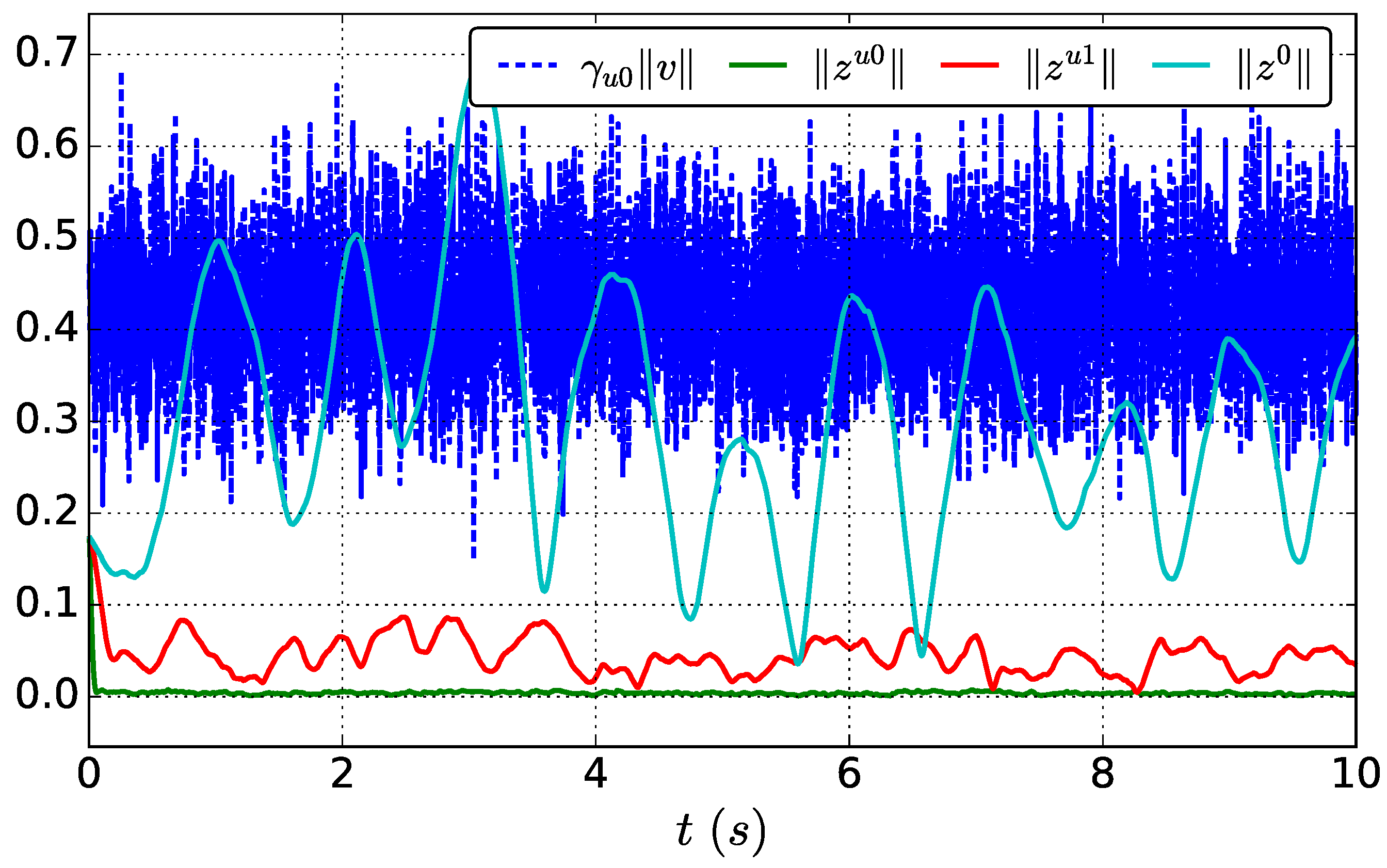
To show the controlled
performance, the quantitative comparison for the norms of
bound
and observed state
are presented in
Figure 7.
In
Figure 7, the factor
corresponds to controller
;
is the observation result when there is no control input for system (11); and
and
refer to the observations of the system (11) when the controllers
and
are applied, respectively. According to
Figure 7,
and
are clearly smaller than
, while
varies in a relative larger range. It is clear that for given disturbance attenuation levels, the studied EI system is robustly stabilized by
and
, respectively. We can find that the deviations of voltage magnitudes exceed the desired upper bound
at around 3 s. However, the controller
with a medium feedback gain effectively maintained the voltage deviations within a small range. Further, the controller
with the strongest stabilization ability provides a perfect result as the voltage deviations are nearly zero throughout the simulation period. Based on the results in
Figure 7, the controller
has much better
performance than
. However, in order to achieve such excellent
performance against the stochastic disturbances in the considered EI system, the controllable generators, such as MTs and DGs, would be overused, which makes the controller inapplicable in most practical scenarios. Thus, when there is no strict requirement for the voltage stabilization, the controller obtained from problem (15) would provide a satisfactory solution for the EI system management.
Based on the analysis above, both
and
have an outstanding effect on the voltage regulation. It is clear that with a smaller disturbance attenuation level
,
has a better performance. Meanwhile, from
Table 2, we found that the feedback gain in
is greater. Larger feedback gain usually suggests faster response speed. However, in practical systems, generators, such as MTs, DGs and FCs, sometimes might not be able to accept control signals from
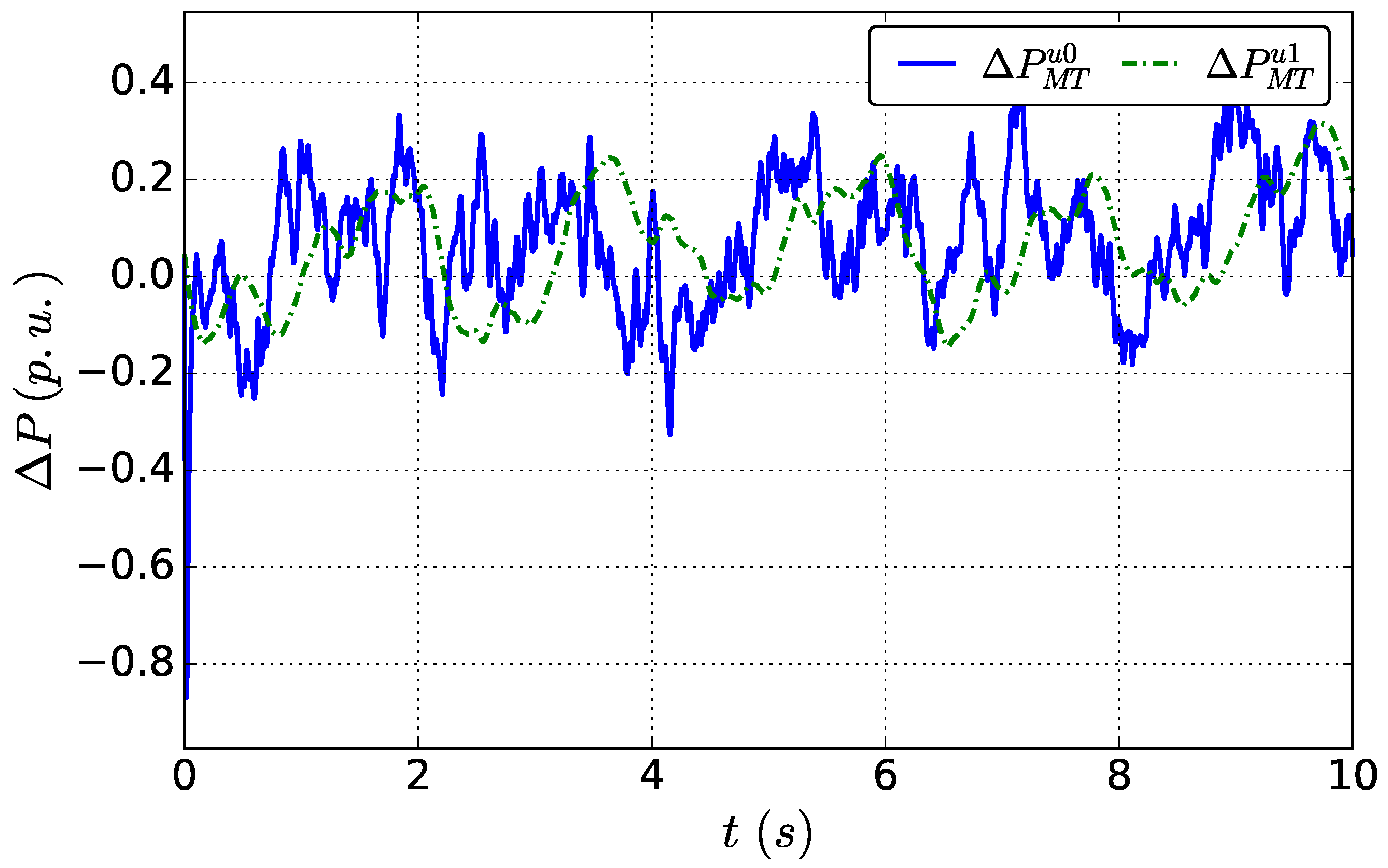
as they have large values. In many scenarios, a controller with proper feedback gain would be preferred. To show the differences between the characteristics of the generators under the controllers
and
, the power dynamics of MTs in
are given in
Figure 8.
From the power dynamic curves in
Figure 8, we found that when
is applied to the EI system, the generators are able to respond to the voltage deviations faster. Thus, there is vast rapid fluctuations in the curves of MT power output corresponding to
. On the other hand, when the controller
is employed, the output power deviations of generators are more moderate. Thus, we can conclude that controller
would be more suitable when the generators are not able to cope with the fast variation of control signals.
In this section, the effectiveness of the proposed control approaches is evaluated with numerical simulations. The performances of the proposed controllers are analyzed. Based on the comparison results, can be utilized in the scenarios with high voltage stability requirements, while it is more suitable to apply in normal EI scenarios.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}