1. Introduction
Power factor correction is very popular and necessary for modern power sources in the ac grid. It decreases line current harmonics, line losses, and increases system power capacity due to reducing system reactive power flow [
1,
2,
3]. Today, boost rectifiers are the most commonly-used circuit structures implemented for power factor correction. However, some consumer electronic devices, portable devices and server power applications [
4,
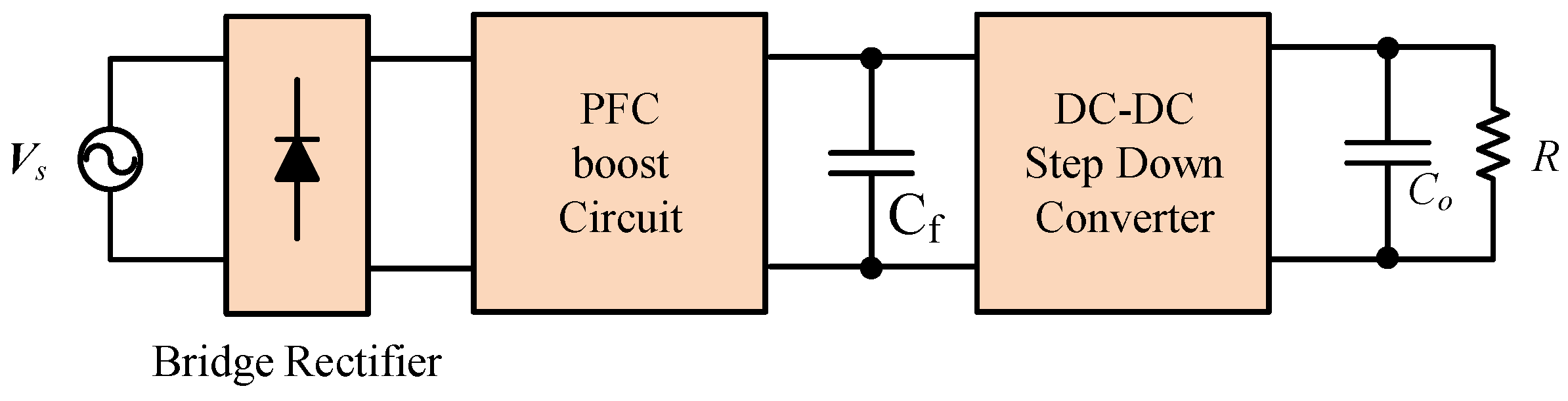
5] require lower dc voltage level than the main ac voltage source. The dc output voltage in boost rectifiers is always higher than the peak value of the main input ac voltage. Therefore, in low dc voltage level applications, another dc-dc step-down converter is necessary that follows the boost rectifier to form a two-stage structure as shown in
Figure 1. Because of the two-stage structure, power efficiency may degrade and the total number of components in the system is increased. Thus, the efficiency, cost, and volume of the two-stage power conversion system are not a good choice and need to be improved.
Step-down PFC rectifiers, such as buck converters are therefore considered. However, the buck rectifier input current is discontinuous. A dead angle also exists when the line input voltage is lower than the output voltage so that the input current cannot be easily shaped [
6,
7,
8]. As a result, the step up/down AC-DC topologies are developed including buck-boost, Cuk, and Sepic type rectifiers [
9,
10,
11]. The buck-boost rectifier also has inherent discontinuous input current like the buck converter, and needs an additional filter to smooth the input current. Although the Sepic rectifier has continuous input current, the output current is still discontinuous and easily causes output voltage ripples.
Bridgeless rectifier topologies are explored in [
12,
13] to reduce the diode bridge conduction losses and increase the conversion efficiency. The bridgeless PFC boost rectifiers, such as the dual boost rectifier and the totem-pole boost rectifier, have been discussed [
14]. Due to the need for lower output voltage applications, the bridgeless Cuk/Sepic rectifiers [
15,
16] with two dc/dc Cuk/Sepic circuit structures were proposed. The bridgeless Cuk rectifier [
16] is shown in
Figure 2. However, four diodes are still needed to achieve step up/down output voltage. Other bridgeless Sepic [
17] and Cuk [
18] power-factor-correction rectifiers were also proposed with reduced number of components and conduction losses. These rectifiers were operated in discontinuous conduction mode without current loop control. A control method for bridgeless Cuk/Sepic power factor correction rectifier operated in continuous conduction mode was also proposed to achieve power decoupling [
19]. Although, the bulky electrolytic capacitor can be replaced with a small film capacitor, this control method requires an extra voltage sensor for the intermediate capacitor and the system cost is increased.
Pulsating power buffering technology [
8,
20,
21] has recently expanded, which can reduce the number of components including passive and active ones. Although rectifiers using pulsating power buffering technology have high power density, high conversion efficiency and high reliability, high voltage stress is still present in the switches and diodes [
22], which leads to high switching and conduction losses and reduces the rectifier life-span.
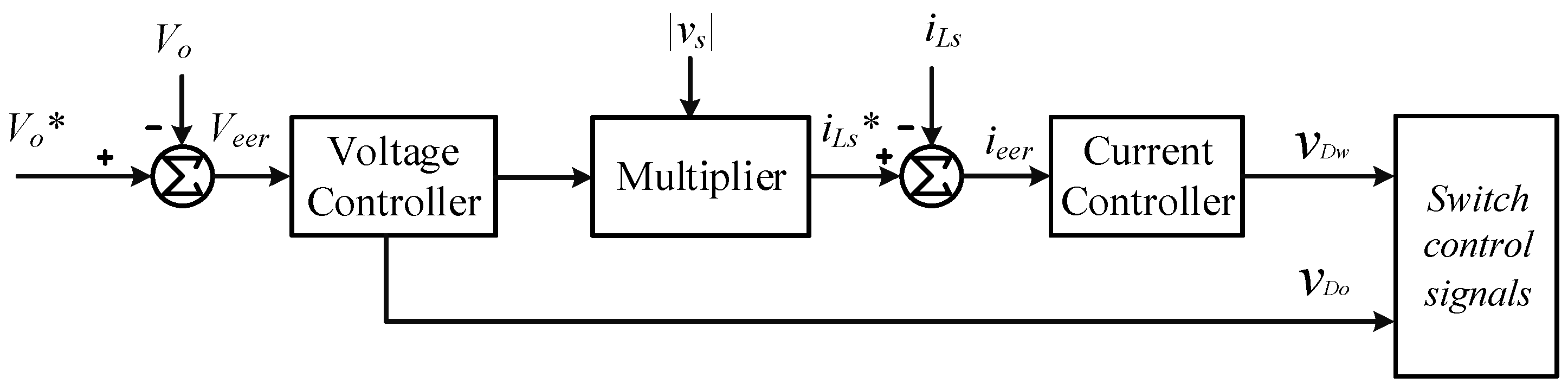
This paper proposes a bridgeless Cuk rectifier with modified dual loop control scheme. The voltage stresses in the switches and diodes can be adjusted to low voltage levels by the proposed control scheme, which may reduce the switching and conduction losses and increase the rectifier life-span. The detailed operation principle and switching sequence of the bridgeless Cuk rectifier are explained. Simultaneously, a modified dual loop control scheme is also proposed to achieve input current shaping and output voltage regulation as well as voltage stress reduction.
2. Circuit Topology and Switching Sequence
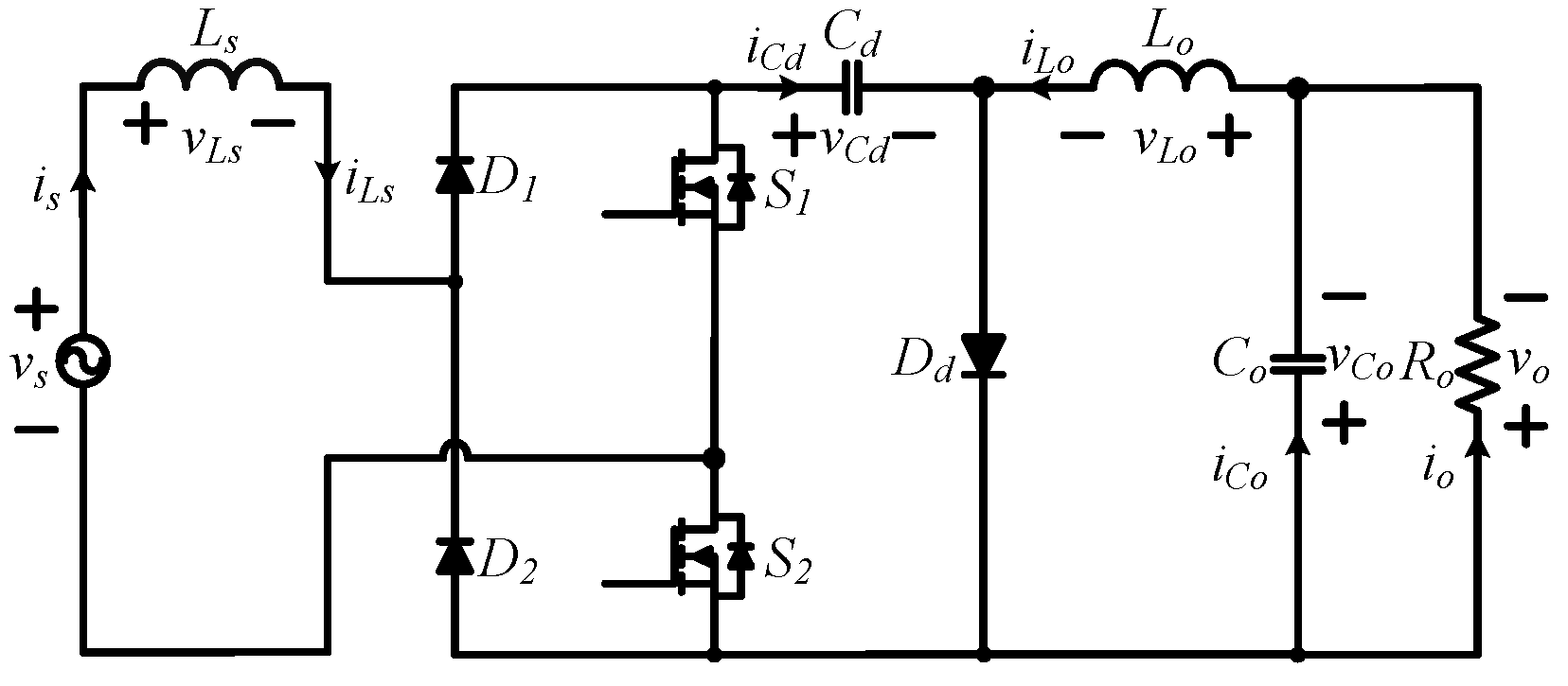
The bridgeless Cuk converter [
19] discussed in this paper is shown in
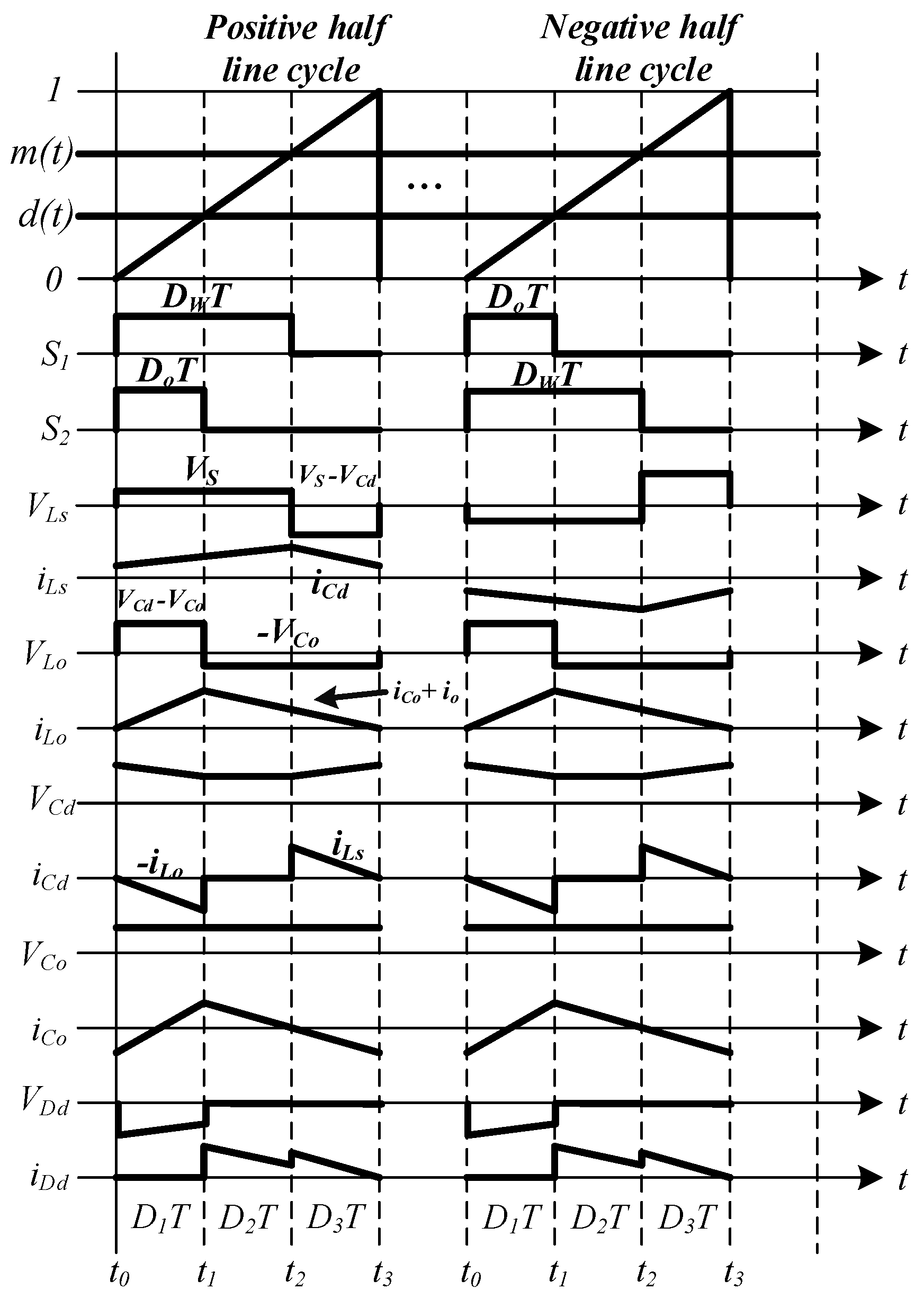
Figure 3. The proposed control switching sequence and key waveforms in one switching period during the positive and negative half line cycle are shown in
Figure 4. For convenience of discussion the active switches are assumed to be ideal active switches with anti-paralleling body diode. Both the input inductor
Ls and output inductor
Lo are assumed to be operated in continuous conduction mode. The circuit operation can be divided into three operation states in one switching period T for both positive and negative half-line cycles. The circuit operation principle of the bridgeless Cuk converter during the positive half-line cycle is discussed first, as follows:
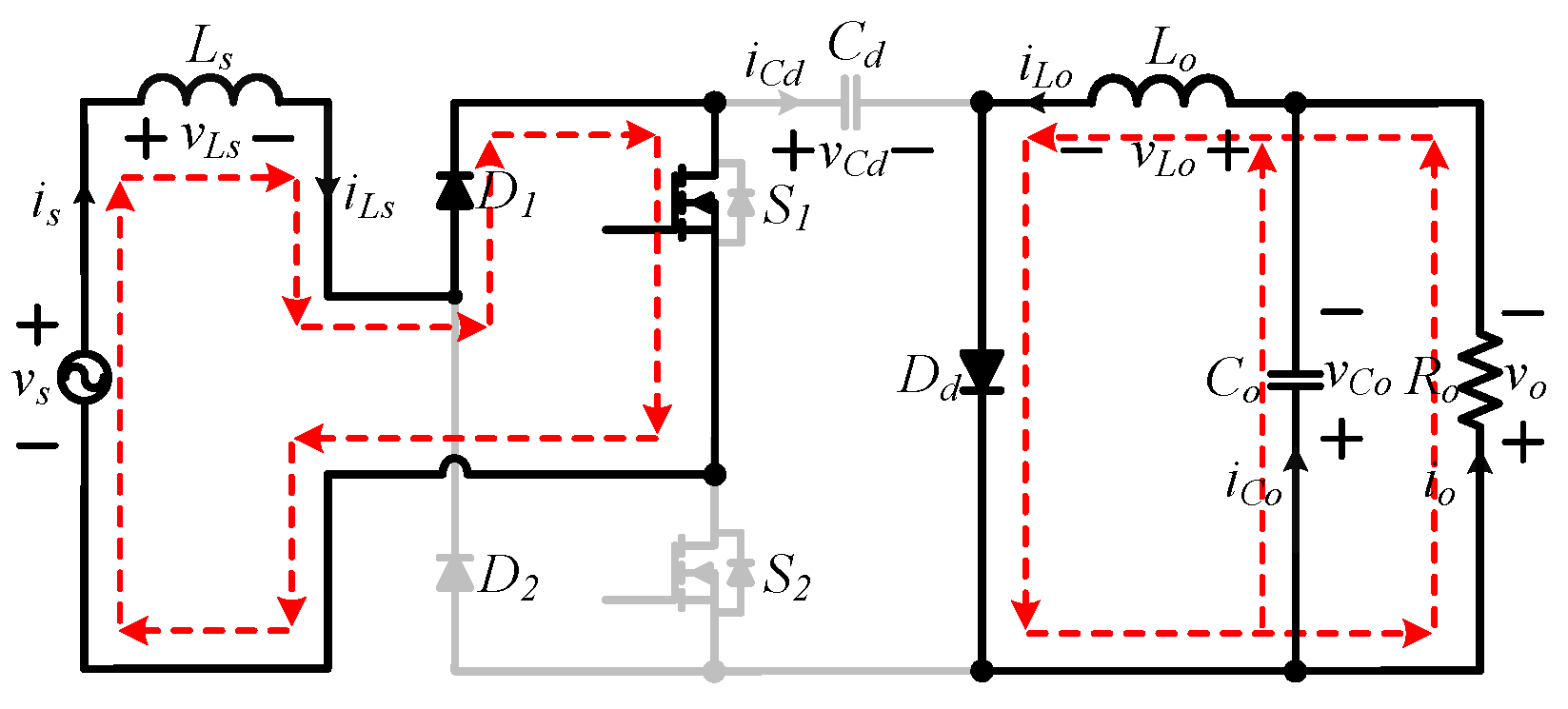
(1) State 1 (
t0 ≤ t <t1): In this state, as shown in
Figure 5, both switches
S1 and
S2 are turned on. The zero-voltage switching of
S2 is obtained due to body diode conducting in switch
S2 in the pre-state, i.e., State 3. The input inductor
Ls is magnetized by the input voltage
Vs so as to increase the inductor current
iLs. The inductor current
iLs flows through diode
D1 and switch
S1 and goes back to the main ac source. Simultaneously, the intermediate capacitor
Cd releases energy to the output inductor
Lo and load. The equivalent circuit equations are described as Equations (1)–(4).
(2) State 2 (
t1 ≤ t <t2): In this state, as shown in
Figure 6, switch
S1 is turned on and switch
S2 is turned off. Switch current
ids1 is increasing. Input inductor
Ls is still magnetized by the input voltage
Vs so as to increase the inductor current
iLs which still flows through diode
D1 and switch
S1 and then goes back to the main ac source. The voltage of intermediate capacitor
Cd remains constant. Simultaneously, the output inductor
Lo is demagnetized and releases energy to the load through the diode
Dd. The equivalent circuit equations are expressed as Equations (5)–(8).
(3) State 3 (
t2 ≤ t <t3): In this state, as shown in
Figure 7, switch
S1 is turned off and
S2 is also turned off. Input inductor
Ls is demagnetized by the voltage −(
Vcd−
Vs) so as to decrease the inductor current
iLs which flows through diodes
D1 and
Dd, and the body diode of switch
S2 and goes back to the main ac source. The intermediate capacitor
Cd is charged by the input inductor current
iLs. Simultaneously, the output inductor
Lo still releases energy to the load through diode
Dd. The equivalent circuit equations are given by Equations (9)–(12).
Referring the gate signals shown in
Figure 4, while the bridgeless Cuk converter is operated during the negative half line cycle, the circuit operation principle in the proposed control switching sequence can be described as follows:
(1) State 1 (
t0 ≤ t <t1): In this state, as shown in
Figure 8, both the switches
S1 and
S2 are turned on. The zero-voltage switching of
S1 is obtained due to body diode conducting in switch
S1 in the pre-state, i.e., State 3. The input inductor
Ls is magnetized by the input voltage
Vs so as to increase the inductor current
iLs in the inverse direction. The inductor current
iLs flows through diode
D2 and switch
S2 and goes back to the main ac source. Simultaneously, the intermediate capacitor
Cd releases energy to the output inductor
Lo and load. The equivalent circuit equations are described as Equations (13)–(16).
(2) State 2 (
t1 ≤ t <t2): In this state, as shown in
Figure 9, switch
S2 is turned on and switch
S1 is turned off. The switch current
ids2 is increasing. Input inductor
Ls is still magnetized by the input voltage
Vs so as to increase the inductor current
iLs in the inverse direction which still flows through diode
D2 and switch
S2 and then goes back to the main ac source. The intermediate capacitor
Cd voltage remains constant. Simultaneously, the output inductor
Lo is demagnetized and releases energy to the load through diode
Dd. The equivalent circuit equations are expressed as Equations (17)–(20).
(3) State 3 (
t2 ≤ t <t3): In this state, as shown in
Figure 10, switch
S2 is turned off and
S1 is also turned off. Input inductor
Ls is demagnetized in the inverse direction by the voltage (
Vcd +
Vs) so as to decrease the inductor current
iLs which flows through diodes
D2,
Dd and the body diode of switch
S1 and goes back to the main ac source. The intermediate capacitor
Cd is charged by the input inductor current
iLs in the inverse direction. Simultaneously, the output inductor
Lo still releases energy to the load through diode
Dd. The equivalent circuit equations are given by Equations (21)–(24).
To further reveal the potential merits of the proposed step up/down converter with modified dual loop control,
Table 1 is provided to summarize comparisons for the bridge Cuk [
11], bridgeless Cuk [
16], and the proposed step up/down converter with modified dual loop control. It is worth mentioning that the power levels of the three converters in
Table 1 are all at small power levels like the fly-back converter. Although the control methods may be different, the harmonics of the three converters all meet the IEC61000-3-2 Class D standard.
4. Simulation and Experimental Results
To verify the validity of the bridgeless step up/down AC/DC converter, some simulation results are executed and a prototype system is constructed to facilitate the theoretical results as verification. The simulation and experimental parameters are listed in
Table 2. The input voltage is the AC grid with 110 V
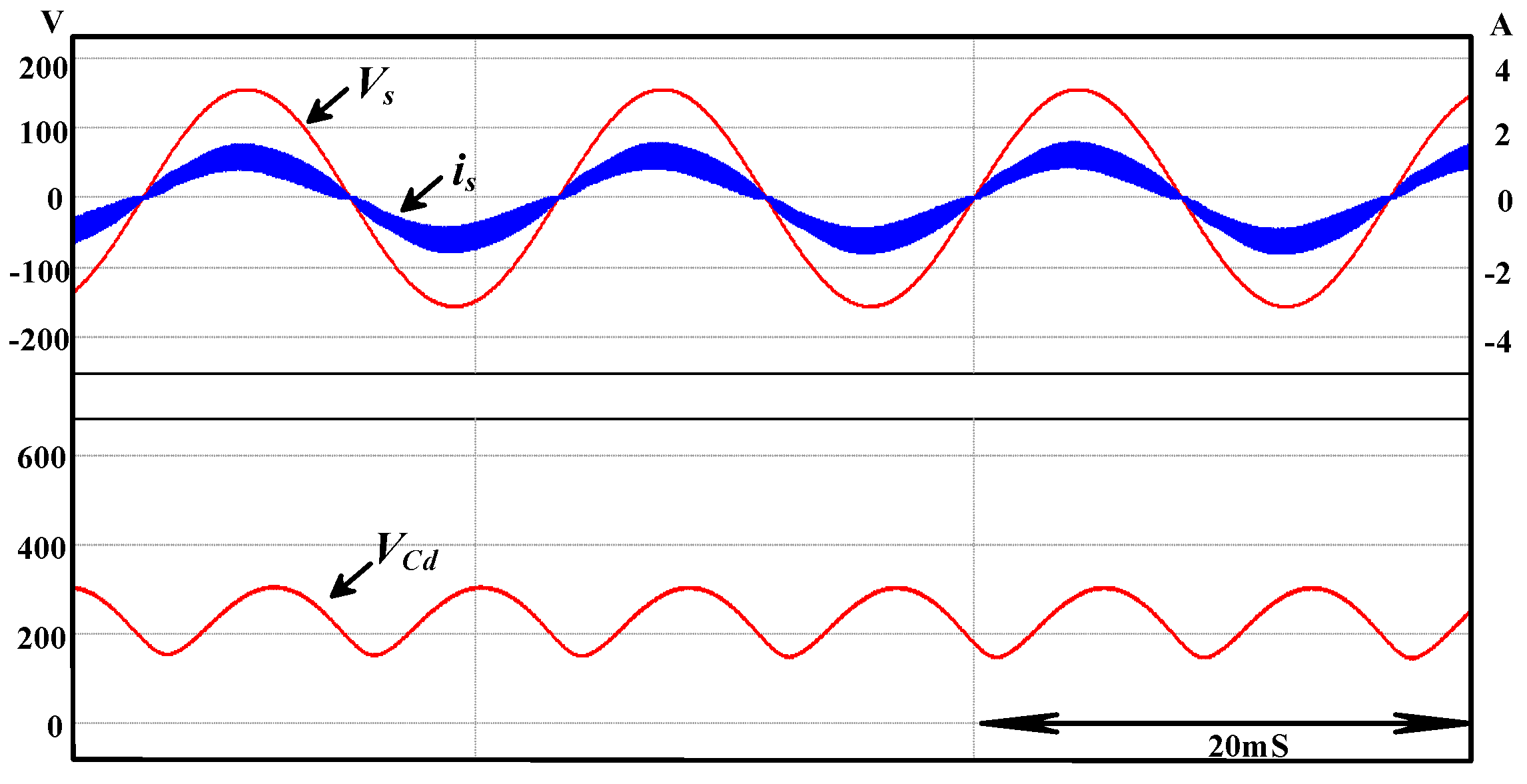
rms and 60 Hz fundamental frequency. The controlled output voltage is 48 V and the load is 48 Ω. The assigned output power rating is 48 W. The simulation results for the input voltage
Vs, input current
is and the corresponding intermediate capacitor voltage
Vcd are shown in
Figure 15. It follows from
Figure 15 that the input current shaping can be achieved.
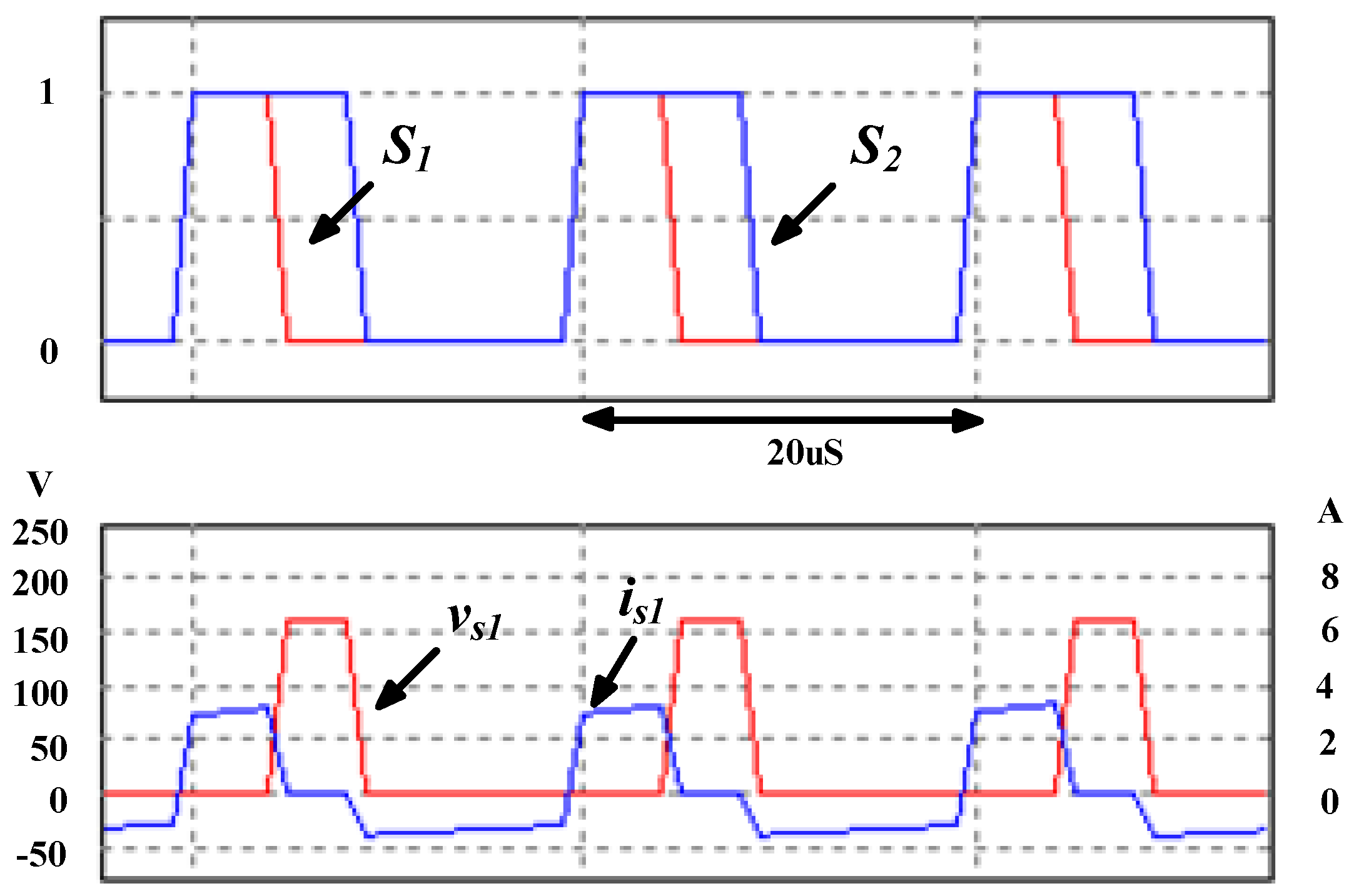
Figure 16 shows the switching control signals for switch
S1 and
S2 and the corresponding voltage and current of switch
S2 during the positive half-line cycle. As can be seen from
Figure 16, the ZVS turn-on of switch
S2 is obtained during the positive half-line cycle. Similarly,
Figure 17 shows the switching control signals for switch
S1 and
S2 and the corresponding voltage and current of switch
S1 during the negative half-line cycle. It also can be seen from
Figure 17 that the ZVS turn-on of switch
S1 is obtained during the negative half-line cycle.
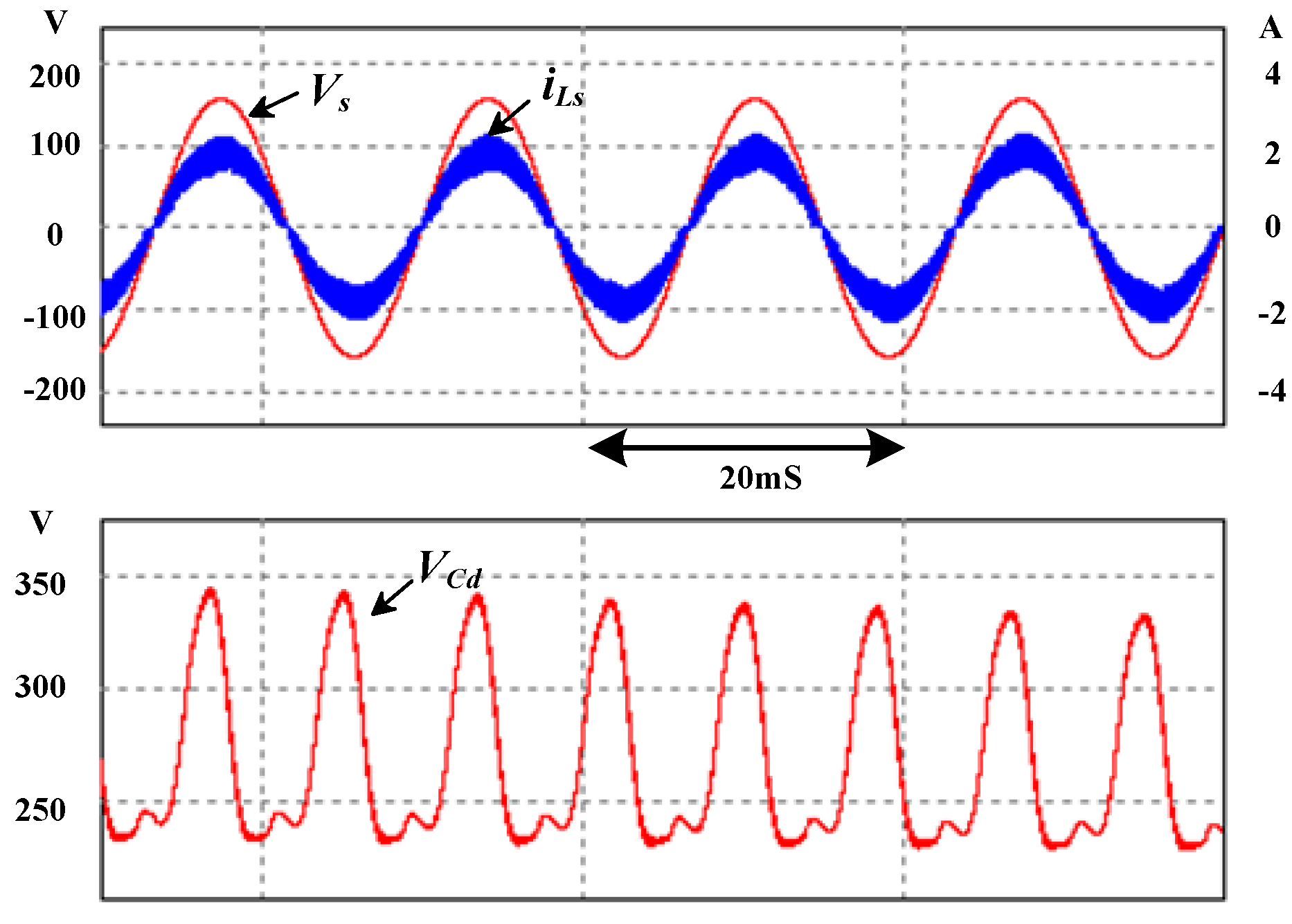
Consider that the load is a dynamic load and/or RL load such as a dc motor whose armature winding resistance is Ra = 0.5 Ω, armature winding inductance is La = 0.5 mH, back electromotive force is 47 V.
Figure 18 shows the simulation results for the input voltage, input current and the corresponding intermediate capacitor voltage. As can be observed from
Figure 18, the output power is about 120 W and the power factor correction is also achieved. Hence, the proposed converter can indeed be operated in the RL load. Consider the intermediate capacitor voltage which can be adjusted using the control signal
VDo based on Equations (26) and (28).
Figure 19 shows the simulation results for the input voltage and the corresponding input current, and the control signal
VDo and the corresponding intermediate capacitor voltage
VCd under the low control signal
VDo value.
Figure 20 shows the same simulated condition under the high control signal
VDo value. It can be seen from
Figure 19 and
Figure 20 that the lower the control signal
VDo value, the higher the intermediate capacitor voltage
VCd. That the duty ratio Do affects the intermediate capacitor voltage level and also the voltage stresses of the switches and diodes in the circuit is very important information. This also implies that the duty ratio Do affects the converter power losses and efficiency. Finally, to facilitate understanding of the proposed step up/down converter with modified dual loop control and as verification, a prototype is constructed with a TMS320F28335 digital signal processor (DSP). The experimental hardware construction block diagram is shown in
Figure 21.
Figure 22 and
Figure 23 show the experimental results for the switching control signals and the corresponding voltage and current of switches
S2 and
S1 during positive and negative half-line cycles, respectively. As can be observed from
Figure 22 and
Figure 23, the ZVS soft switching of switches
S2 and
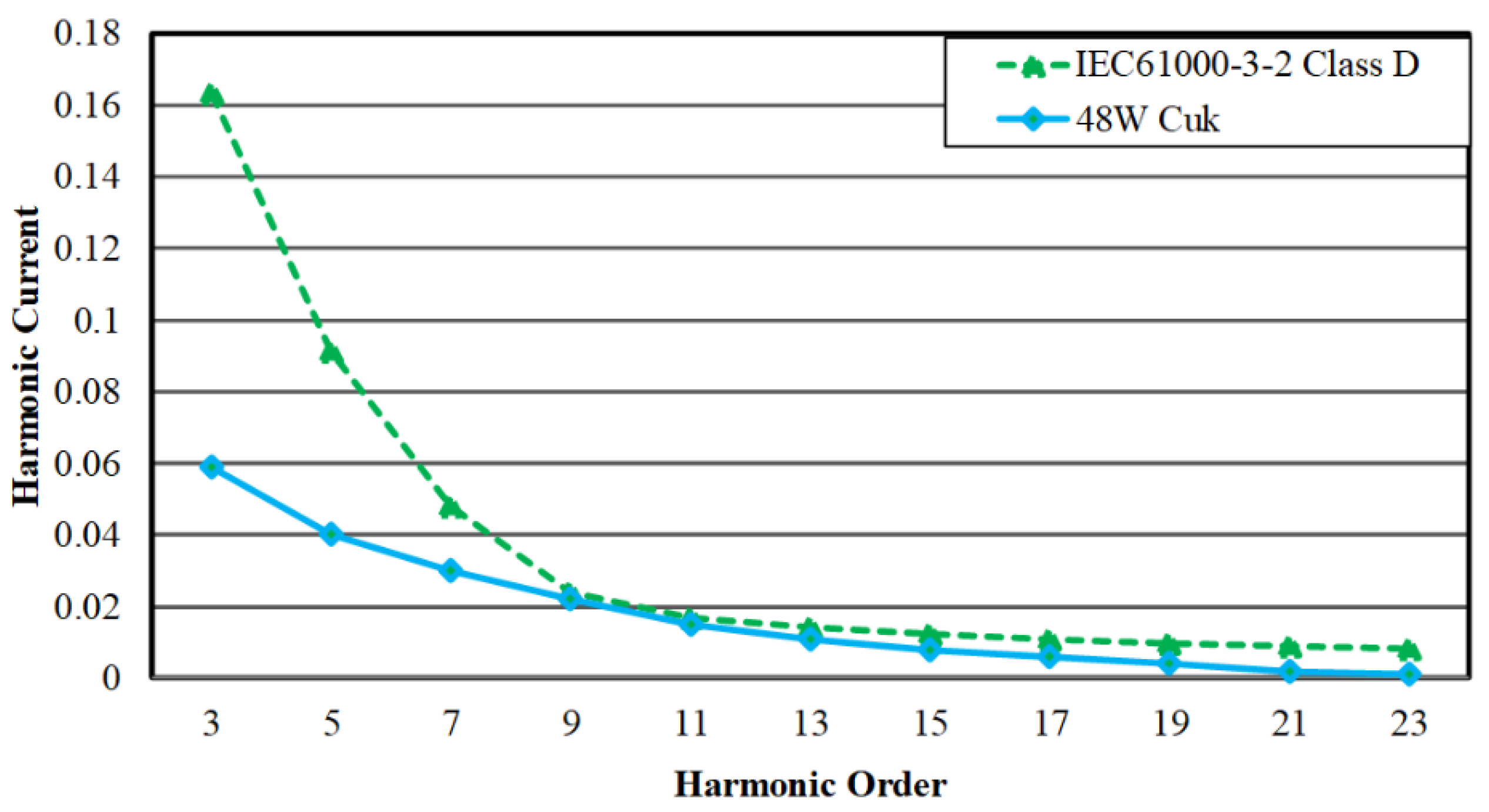
S1 were indeed achieved and agreed with the simulation results. The measured harmonic distribution of the input current is shown in
Figure 24. One can find that the measured harmonic currents meet the IEC 61000-3-2 Class D harmonic standards.
In order to understand the total harmonic distortion
THDi of the input currents in the three converters listed in
Table 1, the PSIM software is adopted to carry out the simulation. The input voltage is 110Vrms, the output voltage is controlled at 48 V and the load is 2 A. The corresponding parameters and simulated results are shown in
Table 3. As can be seen from
Table 3, the input current
THDi of the bridge Cuk [
11] is better than that of the bridgeless Cuk [
16] and the proposed Cuk with modified dual loop control scheme. Nevertheless, the parameter value of the bridge Cuk input inductor [
11] is larger than those for the other two. Although the bridge Cuk [
11] has the smallest input current
THDi, the input inductor may make it appear bulky.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}