Battery Electric Vehicle Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersections



Abstract
:
1. Introduction
2. Model Development
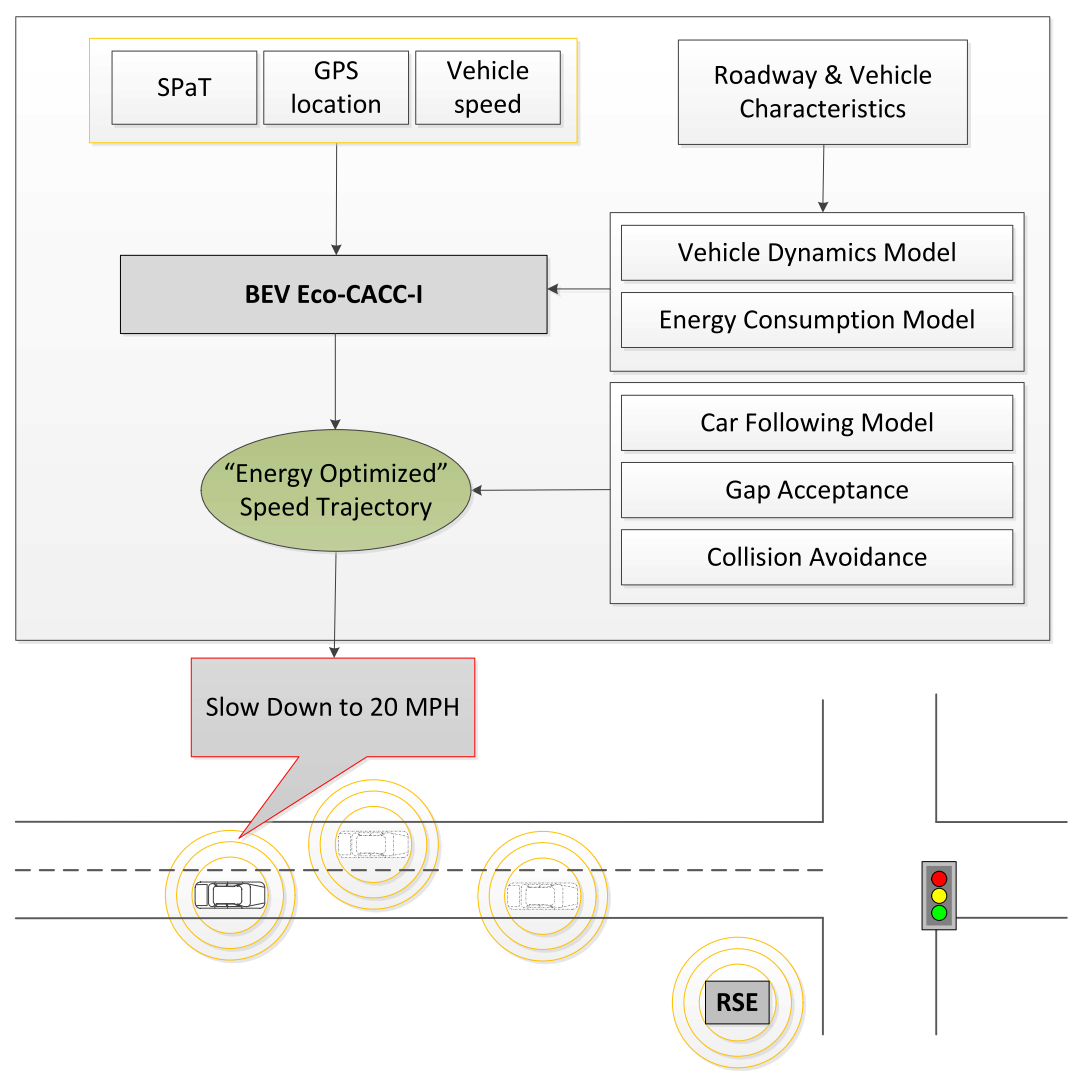
2.1. Eco-CACC-I for BEVs
- (1)
- The maximum speed v1(t) allowed by the vehicle acceleration model for a given vehicle throttle position;
- (2)
- The maximum speed v2(t) constrained by the steady-state vehicle spacing in the simulation software;
- (3)
- The speed limit of v3(t) to avoid a rear-end vehicle collision; and
- (4)
- The maximum speed v4(t) allowed on the road.
2.2. Vehicle Dynamics Model
2.3. Energy Consumption Model for BEVs
3. Case Study
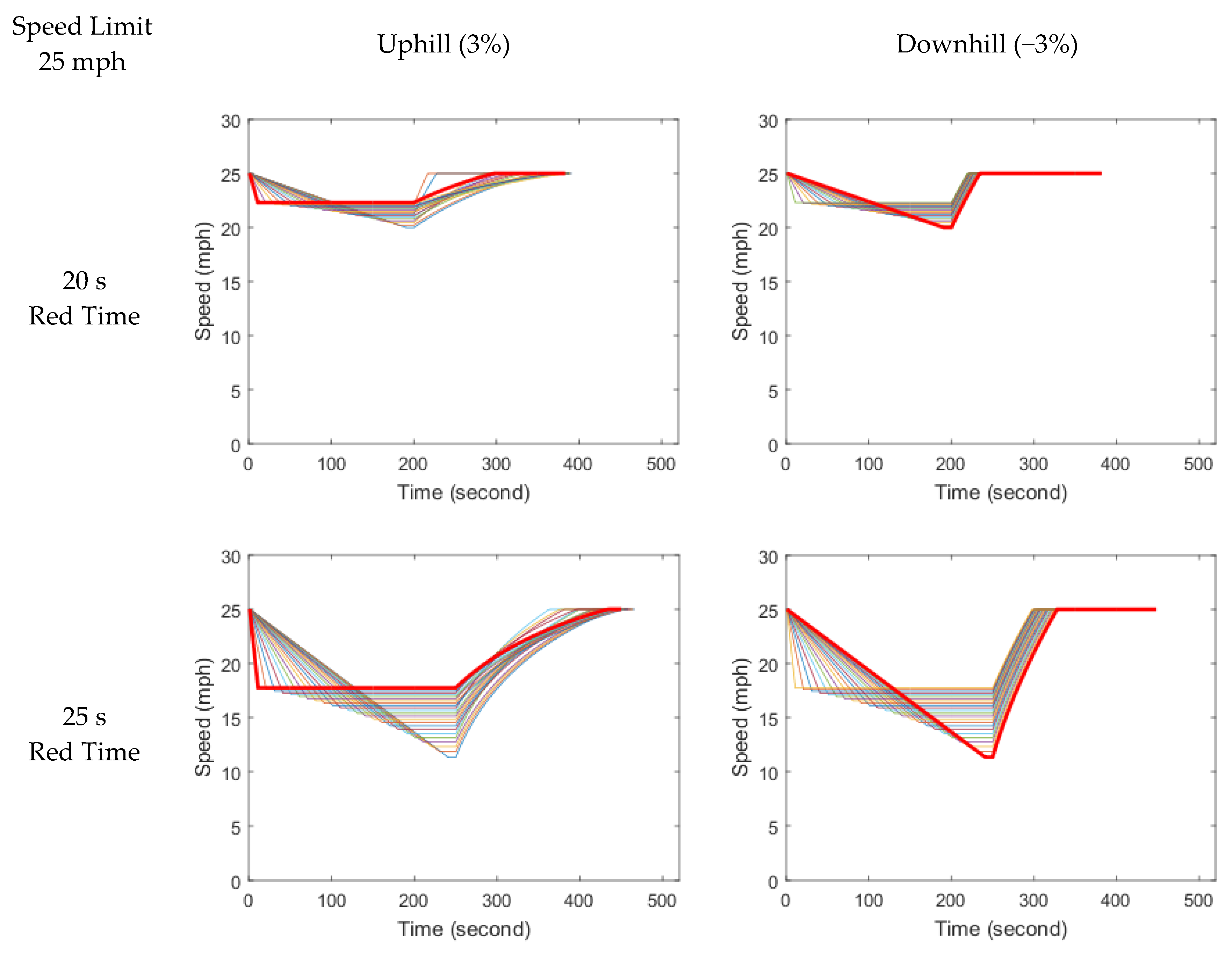
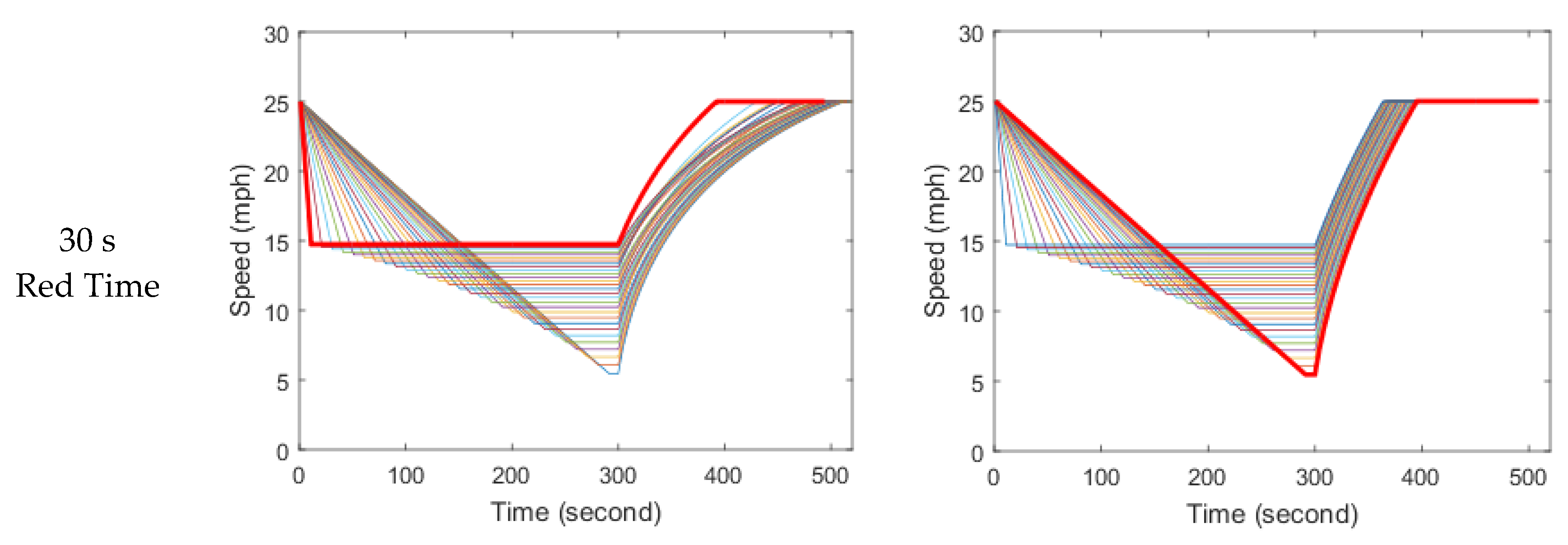
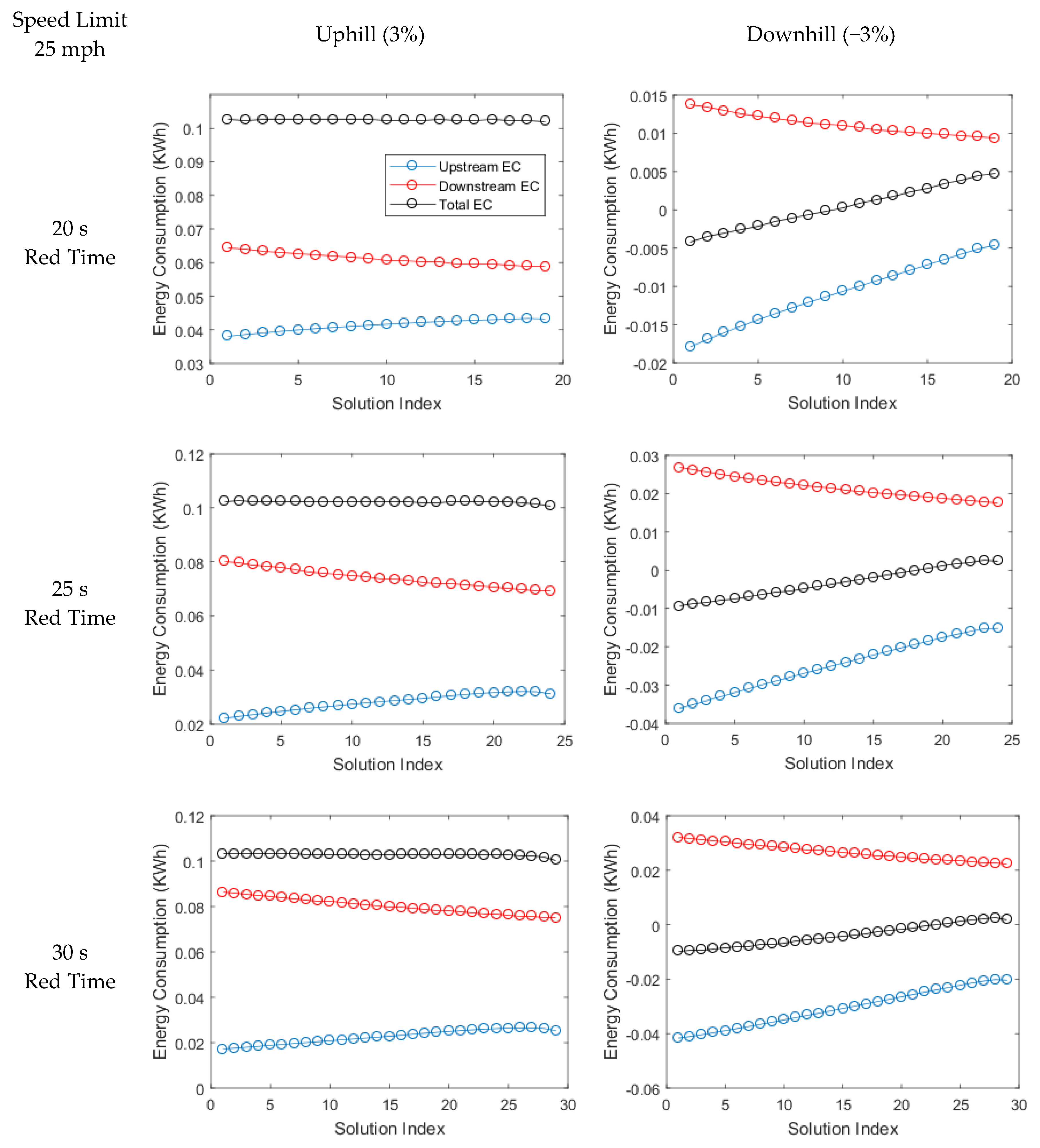
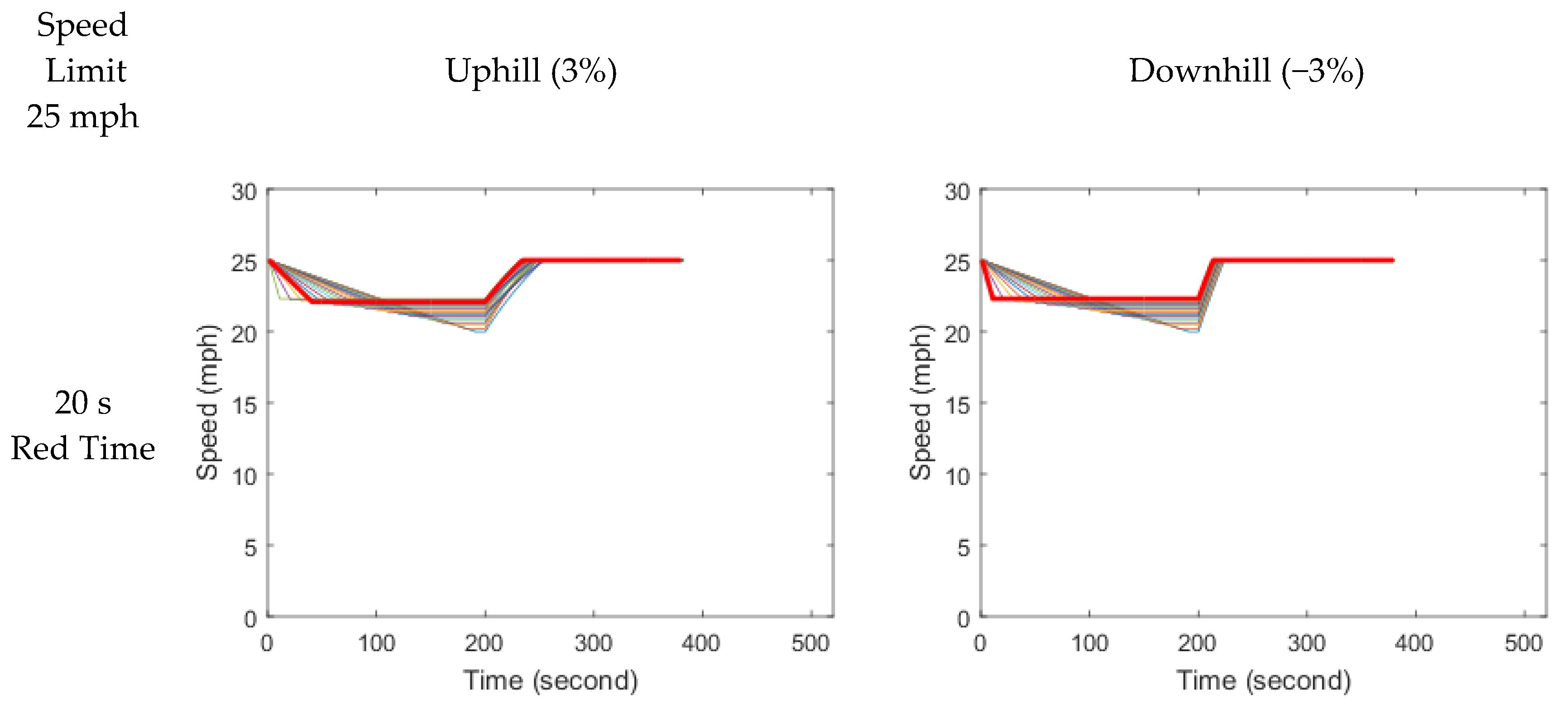
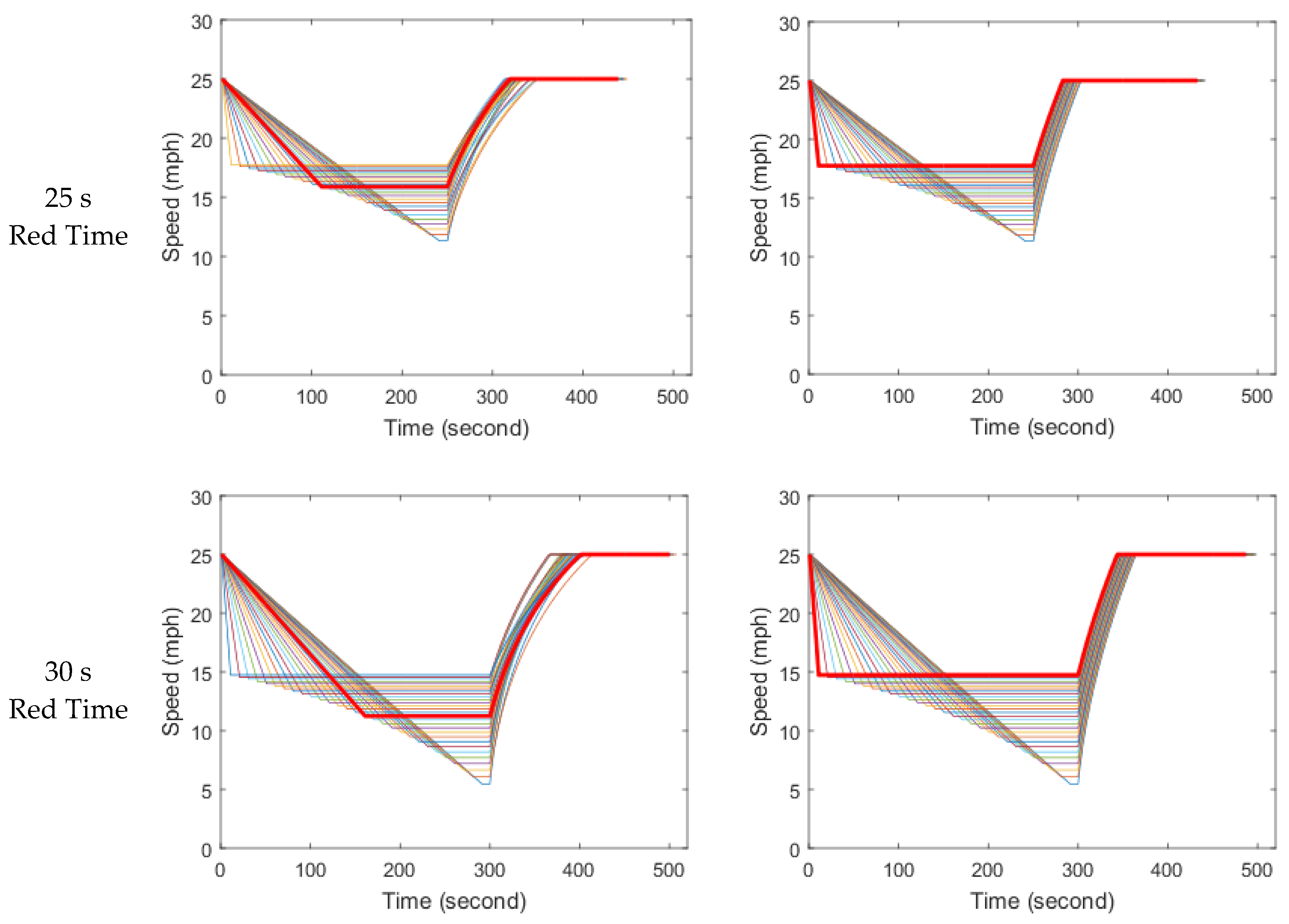
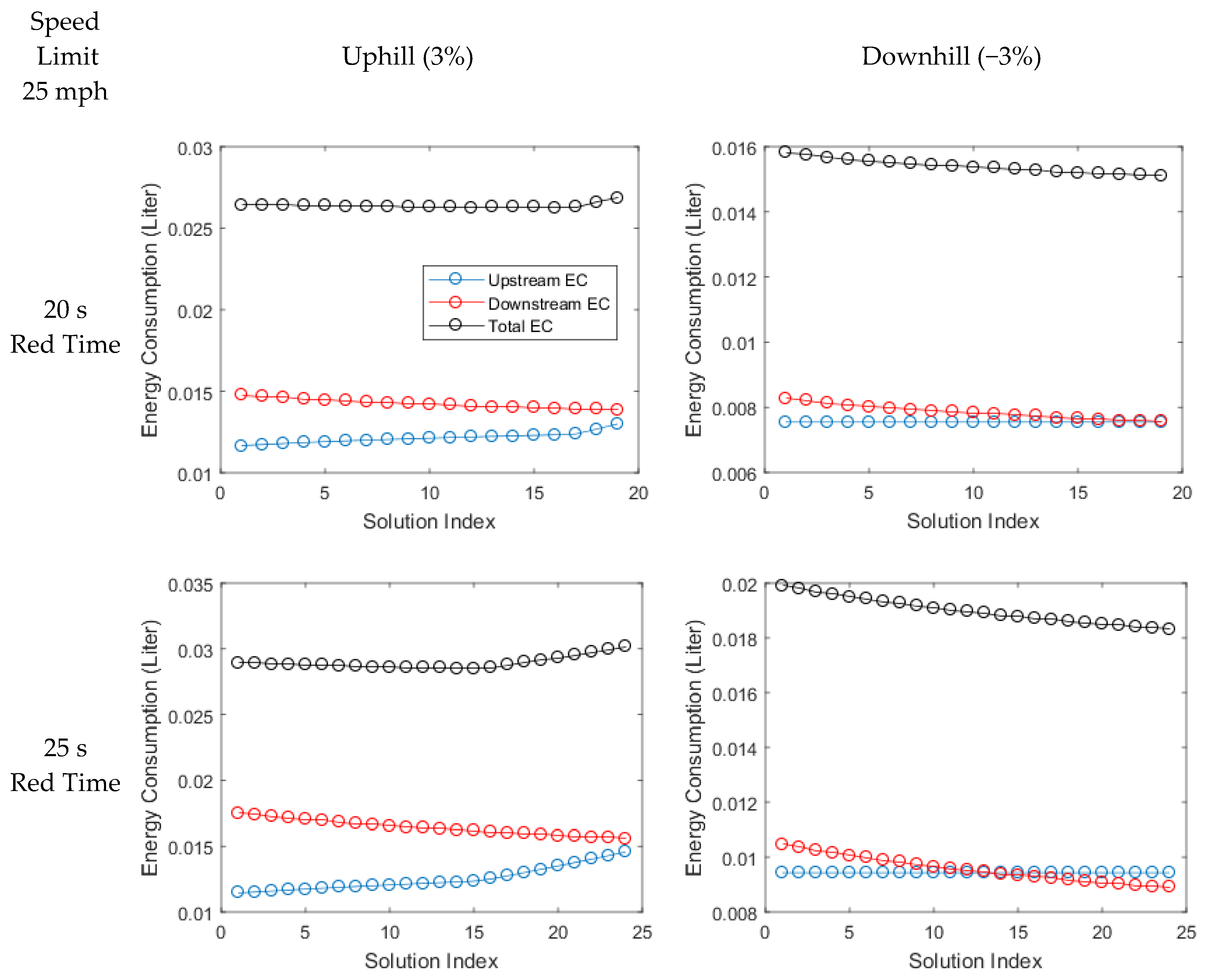
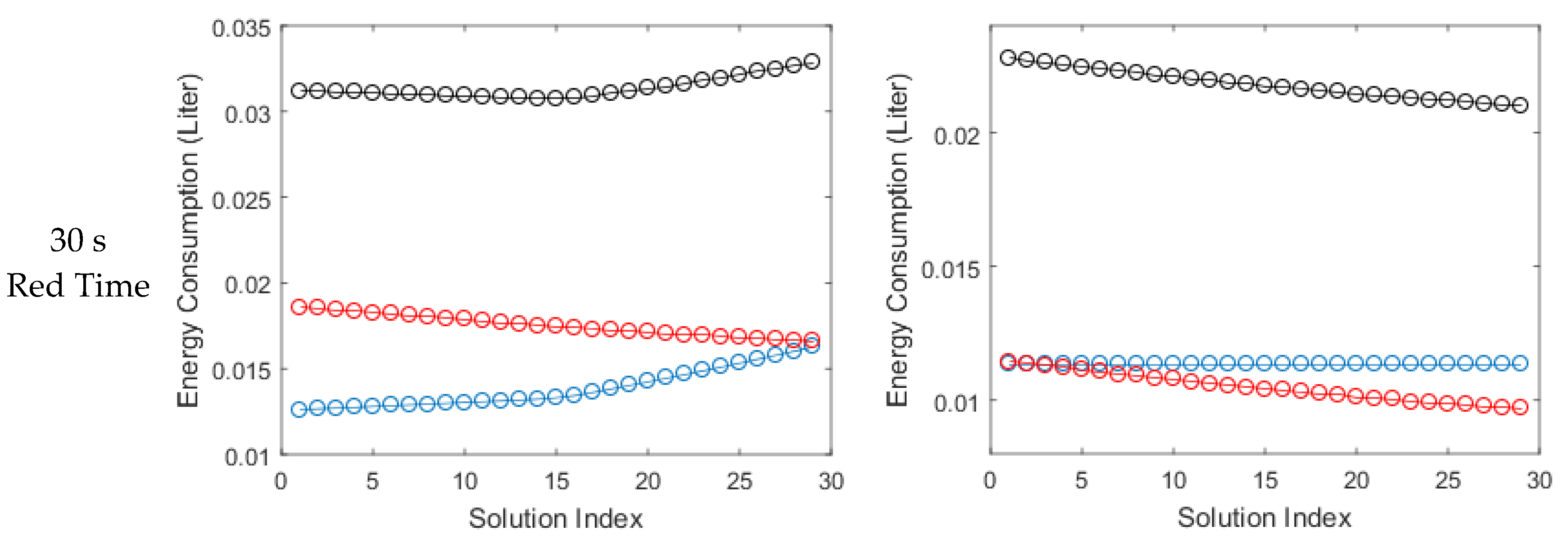
3.1. Test Eco-CACC-I for BEVs
- Downhill direction: The optimal speed profile corresponds to the minimum deceleration level in the solution space.
- ○
- Upstream—lower cruise speed produces longer brake time and more regenerative energy.
- ○
- Downstream—lower cruise speed means more energy consumption downstream; however, the benefit of energy regeneration upstream exceeds the additional needs for energy downstream.
- Uphill direction: The optimal speed profile corresponds to the maximum deceleration level in the solution space.
- ○
- Upstream—different from the solution for the downhill direction, the vehicle regenerates minimum energy by decelerating in the uphill direction.
- ○
- Downstream—the vehicle needs the maximum cruise speed while proceeding through the intersection so that the downstream trip requires less energy.
3.2. Eco-CACC-I for ICEVs
- Downhill direction: The optimal speed profile corresponds to the maximum deceleration level in the solution space.
- ○
- Upstream—different deceleration levels do not change the ICEV’s energy consumption during braking, so higher cruise speeds consume a similar amount of fuel.
- ○
- Downstream—higher cruise speeds at the stop bar result in less energy consumption downstream.
- Uphill direction: The optimal speed profile corresponds to the maximum deceleration level in the solution space.
- ○
- Upstream—unlike the downhill direction, the vehicle consumes more energy to reach a higher cruise speed while traveling uphill.
- ○
- Downstream—higher cruise speeds result in less energy consumption downstream. Therefore, the optimal solution sits in the mid-range, depending on the vehicle’s weight, engine power, and roadway slope.
3.3. Test Results Analysis and Comparison
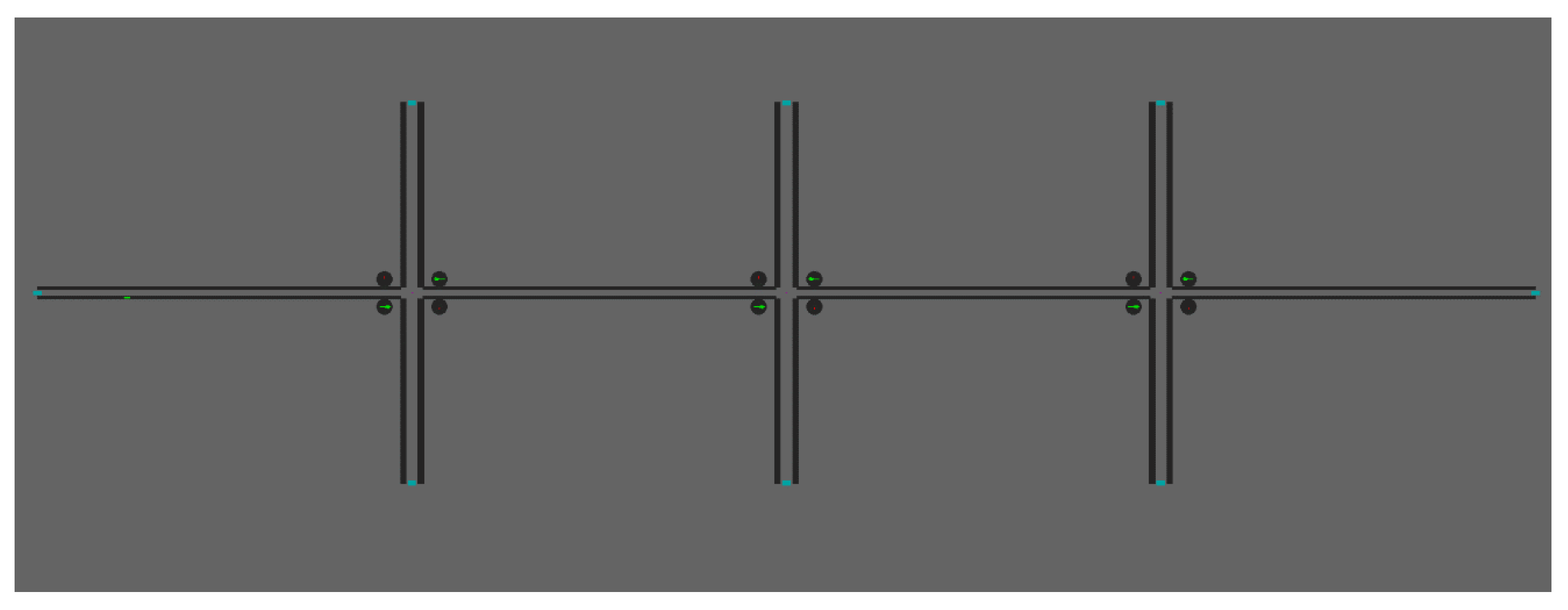
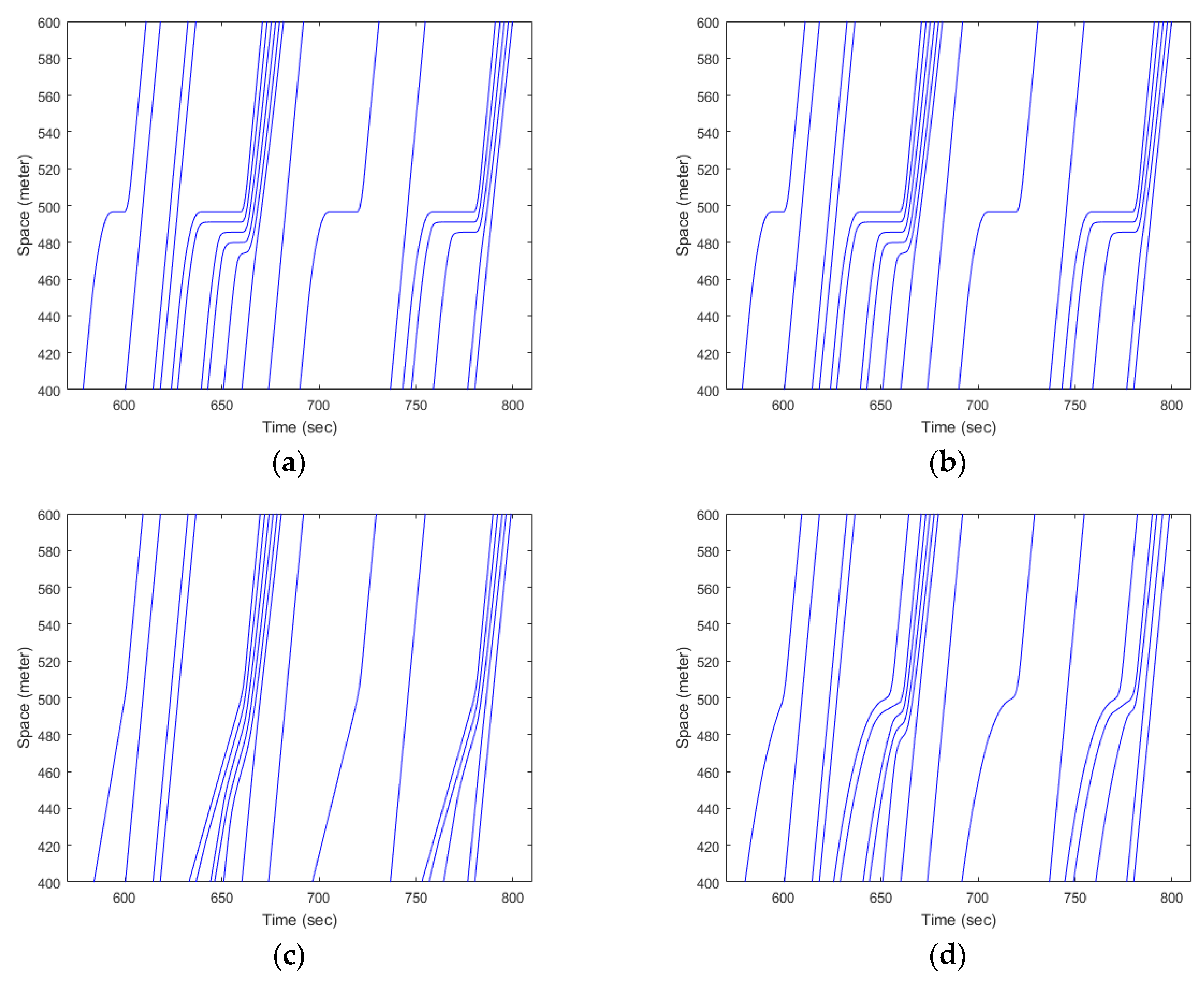
3.4. Test Eco-CACC-I Controllers in Microscopic Traffic Simulation Software
- Scenario 1 (uninformed drive for ICEVs): All the vehicles were ICEVs, and no Eco-CACC controller was activated. Each vehicle only followed the normal traffic rules (such as vehicle dynamics model, car-following model, collision avoidance) while traversing the network.
- Scenario 2 (uninformed drive for BEVs): All the vehicles were BEVs, and no Eco-CACC controller was activated. Each vehicle only followed the normal traffic rules (such as vehicle dynamics model, car-following model, collision avoidance) while traversing the network.
- Scenario 3 (informed drive by ICEV Eco-CACC-I): All the vehicles were ICEVs, and the ICEV Eco-CACC-I controller was activated when a vehicle was within a 200-m range (both upstream and downstream) of the signalized intersection.
- Scenario 4 (informed drive by BEV Eco-CACC-I): All the vehicles were BEVs, and the BEV Eco-CACC-I controller was activated when a vehicle was within a 200-m range (both upstream and downstream) of the signalized intersection.
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- U.S. Energy Information Administration. Oil: Crude and Petroleum Products Explained; 2018. Available online: https://www.eia.gov/energyexplained/oil-and-petroleum-products/use-of-oil.php (accessed on 5 May 2020).
- Kamalanathsharma, R.K. Eco-Driving in the Vicinity of Roadway Intersections—Algorithmic Development, Modeling, and Testing. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2014. [Google Scholar]
- USDOT.a. Connected Vehicle Technology; 2015. Available online: http://www.its.dot.gov/connected_vehicle/connected_vehicle_tech.htm (accessed on 5 May 2020).
- Rakha, H.; Ahn, K.; Trani, A. Comparison of MOBILE5a, MOBILE6, VT-MICRO, and CMEM models for estimating hot-stabilized light-duty gasoline vehicle emissions. Can. J. Civil. Eng. 2003, 30, 1010–1021. [Google Scholar] [CrossRef]
- Li, X.; Li, G.; Pang, S.-S.; Yang, X.; Tian, J. Signal timing of intersections using integrated optimization of traffic quality, emissions and fuel consumption: A note. Transp. Res. Part D Transp. Environ. 2004, 9, 401–407. [Google Scholar] [CrossRef]
- Stevanovic, A.; Stevanovic, J.; Zhang, K.; Batterman, S. Optimizing traffic control to reduce fuel consumption and vehicular emissions: Integrated approach with VISSIM, CMEM, and VISGAOST. Transp. Res. Rec. J. Transp. Res. Board 2009, 2128, 105–113. [Google Scholar] [CrossRef] [Green Version]
- Saboohi, Y.; Farzaneh, H. Model for optimizing energy efficiency through controlling speed and gear ratio. Energy Eff. 2008, 1, 65–76. [Google Scholar] [CrossRef]
- Saboohi, Y.; Farzaneh, H. Model for developing an eco-driving strategy of a passenger vehicle based on the least fuel consumption. Appl. Energy 2009, 86, 1925–1932. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transp. Res. Part D Transp. Environ. 2009, 14, 400–410. [Google Scholar] [CrossRef]
- Malakorn, K.J.; Park, B. Assessment of mobility, energy, and environment impacts of IntelliDrive-based Cooperative Adaptive Cruise Control and Intelligent Traffic Signal control. In Proceedings of the IEEE International Symposium on Sustainable Systems and Technology (ISSST) 2010, Arlington, VA, USA, 17–19 May 2010; pp. 1–6. [Google Scholar]
- Asadi, B.; Vahidi, A. Predictive cruise control: Utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. Control. Syst. Technol. IEEE Trans. 2011, 19, 707–714. [Google Scholar] [CrossRef]
- Guan, T.; Frey, C.W. Predictive fuel efficiency optimization using traffic light timings and fuel consumption model. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems-(ITSC), The Hague, The Netherlands, 6–9 October 2013; pp. 1553–1558. [Google Scholar]
- Miyatake, M.; Kuriyama, M.; Takeda, Y. Theoretical study on eco-driving technique for an electric vehicle considering traffic signals. In Proceedings of the IEEE Ninth International Conference on Power Electronics and Drive Systems (PEDS), Singapore, 5–8 December 2011; pp. 733–738. [Google Scholar]
- Zhang, R.; Yao, E. Eco-driving at signalised intersections for electric vehicles. IET Intell. Transp. Syst. 2015, 9, 488–497. [Google Scholar] [CrossRef]
- Qi, X.; Barth, M.J.; Wu, G.; Boriboonsomsin, K.; Wang, P. Energy Impact of Connected Eco-driving on Electric Vehicles. In Road Vehicle Automation, 4th ed.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 97–111. [Google Scholar]
- Wu, X.; He, X.; Yu, G.; Harmandayan, A.; Wang, Y. Energy-optimal speed control for electric vehicles on signalized arterials. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2786–2796. [Google Scholar] [CrossRef]
- De Nunzio, G.; Wit, C.C.; Moulin, P.; Di Domenico, D. Eco--driving in urban traffic networks using traffic signals information. Int. J. Robust Nonlinear Control. 2016, 26, 1307–1324. [Google Scholar] [CrossRef] [Green Version]
- Almannaa, M.H.; Chen, H.; Rakha, H.A.; Loulizi, A.; El-Shawarby, I. Field implementation and testing of an automated eco-cooperative adaptive cruise control system in the vicinity of signalized intersections. Transp. Res. Part D Transp. Environ. 2019, 67, 244–262. [Google Scholar] [CrossRef]
- Chen, H.; Rakha, H.A.; Almannaa, M.; Loulizi, A.; El-Shawarby, I. Field Implementation of an Eco-cooperative Adaptive Cruise System at Signalized Intersections. In Proceedings of the 94th Annual Meeting Transportation Research Board, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Chen, H.; Rakha, H.A.; Loulizi, A.; El-Shawarby, I.; Almannaa, M.H. Development and Preliminary Field Testing of an In-Vehicle Eco-Speed Control System in the Vicinity of Signalized Intersections. IFAC-PapersOnLine 2016, 49, 249–254. [Google Scholar] [CrossRef]
- Kamalanathsharma, R.K.; Rakha, H.A.; Yang, H. Networkwide impacts of vehicle ecospeed control in the vicinity of traffic signalized intersections. Transp. Res. Rec. 2015, 2503, 91–99. [Google Scholar] [CrossRef]
- Kamalanathsharma, R.K.; Rakha, H.A. Leveraging connected vehicle technology and telematics to enhance vehicle fuel efficiency in the vicinity of signalized intersections. J. Intell. Transp. Syst. 2016, 20, 33–44. [Google Scholar] [CrossRef]
- Fadhloun, K.; Rakha, H.; Loulizi, A.; Abdelkefi, A. Vehicle dynamics model for estimating typical vehicle accelerations. Transp. Res. Rec. J. Transp. Res. Board 2015, 249, 61–71. [Google Scholar] [CrossRef]
- Yu, K.; Yang, J.; Yamaguchi, D. Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control. Theory Technol. 2015, 13, 17–28. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Gao, Y.; Chu, L.; Ehsani, M. Design and control principles of hybrid braking system for EV, HEV and FCV. In Proceedings of the Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2017; IEEE: Piscataway, NJ, USA, 2007; pp. 384–391. [Google Scholar]
- Aerde, M.V.; Rakha, H. INTEGRATION © Release 2.30 for Windows: User’s Guide—Volume II: Advanced Model. Features; M. Van Aerde & Assoc., Ltd.: Blacksburg, VA, USA, 2007. [Google Scholar]
- Aerde, M.V.; Rakha, H. INTEGRATION © Release 2.30 for Windows: User’s Guide—Volume I: Fundamental Model. Features; M. Van Aerde & Assoc., Ltd.: Blacksburg, VA, USA, 2007. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Roadway Grade | BEV | ICEV |
|---|---|---|
| Uphill | Maximum deceleration | Mid-range deceleration |
| Downhill | Minimum deceleration | Maximum deceleration |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Rakha, H.A. Battery Electric Vehicle Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersections. Energies 2020, 13, 2433. https://doi.org/10.3390/en13102433
Chen H, Rakha HA. Battery Electric Vehicle Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersections. Energies. 2020; 13(10):2433. https://doi.org/10.3390/en13102433
Chicago/Turabian StyleChen, Hao, and Hesham A. Rakha. 2020. "Battery Electric Vehicle Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersections" Energies 13, no. 10: 2433. https://doi.org/10.3390/en13102433
APA StyleChen, H., & Rakha, H. A. (2020). Battery Electric Vehicle Eco-Cooperative Adaptive Cruise Control in the Vicinity of Signalized Intersections. Energies, 13(10), 2433. https://doi.org/10.3390/en13102433