A Study on the V2G Technology Incorporation in a DC Nanogrid and on the Provision of Voltage Regulation to the Power Grid



Abstract
:1. Introduction
- The requirements that have to be taken into consideration when designing a DC nanogrid that enable the V2G operation. The configuration is defined as a nanogrid and not a microgrid since it consists of low power topologies and the control strategies that are deployed are simple and easy to be implemented.
- The description of the power converters that are required as well as the control systems that enable the exchange of active and reactive power between the nanogrid and the utility.
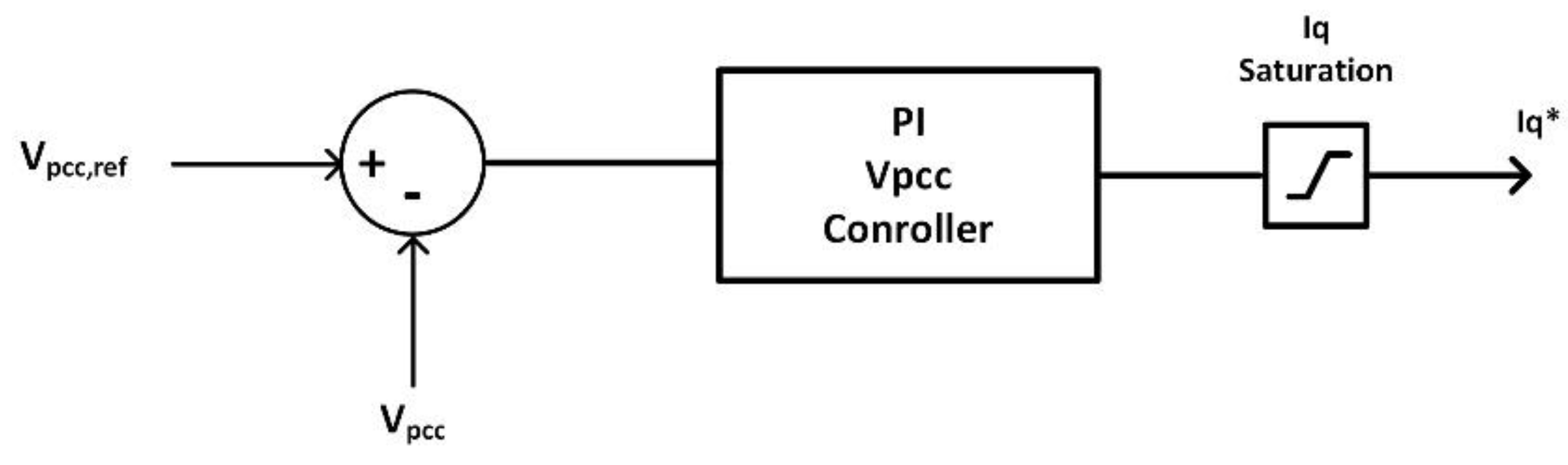
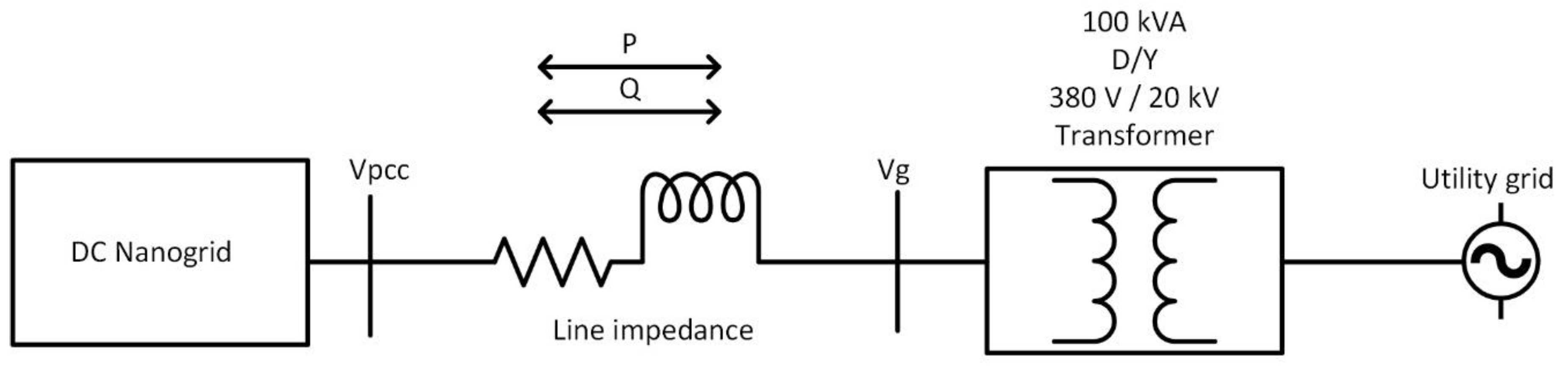
- The provision of voltage regulation to the power grid. As it was mentioned before, many ancillary services can be provided by the nanogrids. However, the current study focuses on the provision of voltage regulation towards the power grid through the exchange of active and reactive power. Authors in [24] propose to use the EVs batteries to alleviate voltage rise caused by high penetration of photovoltaics while [25] solves this problem by controlling the reactive power. Research conducted in [26] proposes reactive power compensation in order to limit the voltage sags created by EV fast-charging stations. This work investigates the voltage regulation by analyzing the impact of active and reactive power exchanged with the power grid. Furthermore, unlike other studies, different values of grid impedance will be tested.
- The demonstration of the proposed voltage regulation strategies in an AC radial distribution grid.
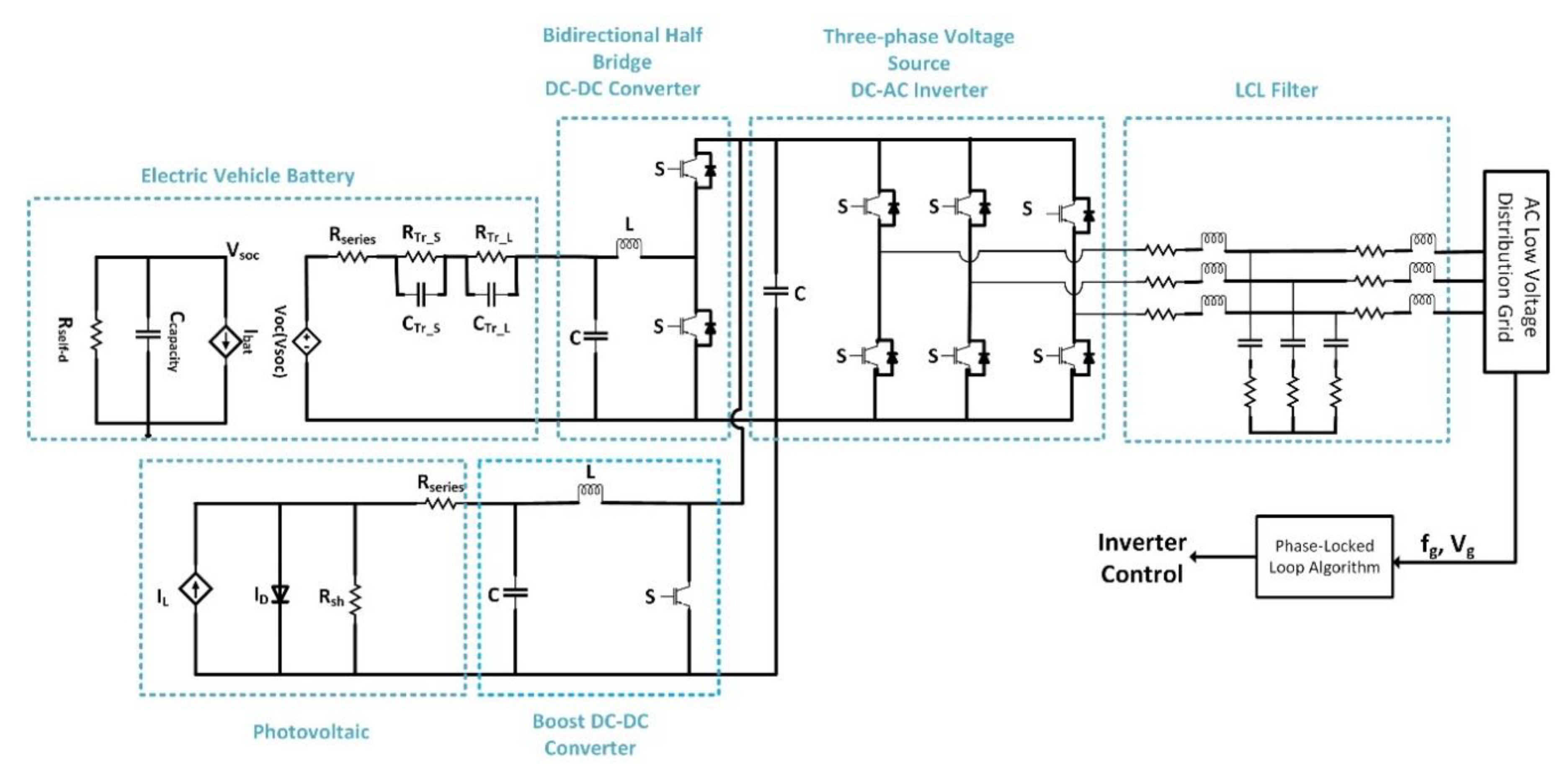
2. DC Nanogrid Configuration
2.1. Photovoltaic System
2.2. EV Battery Model
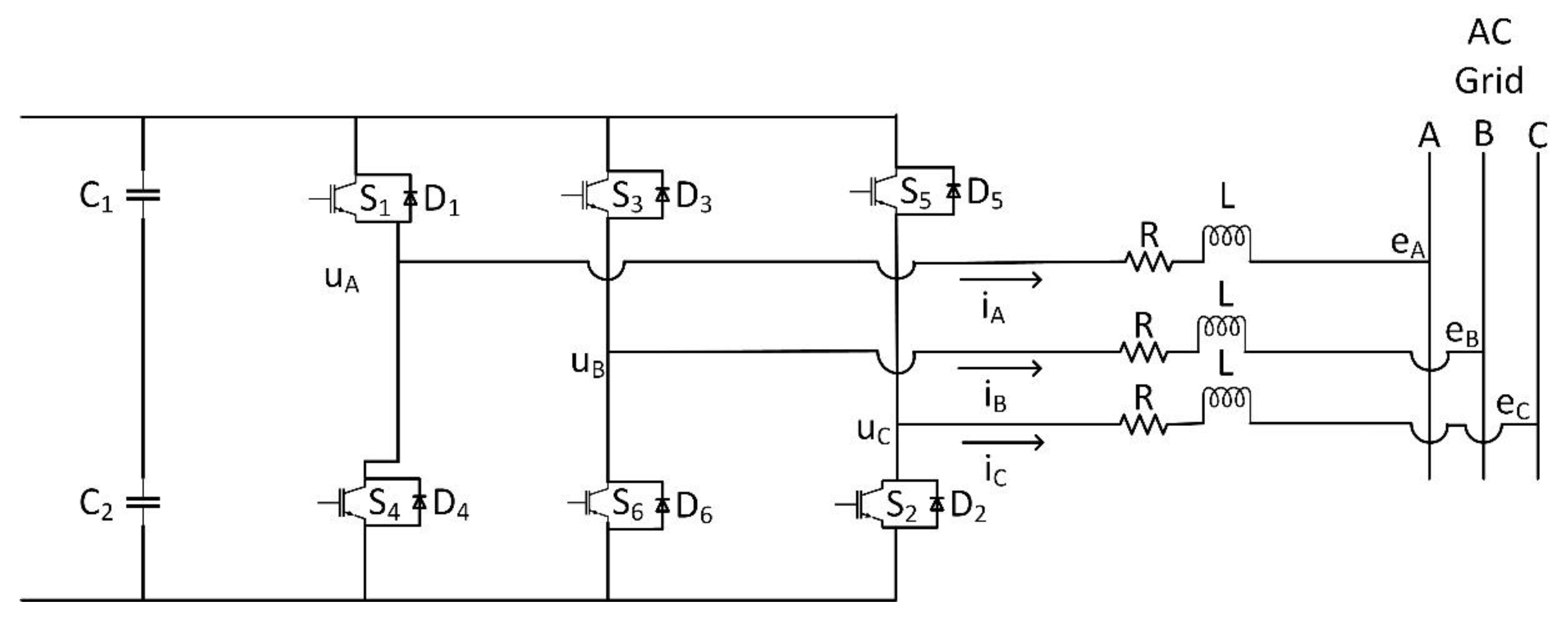
2.3. Power Converters
2.4. LCL Filter
3. Control Strategy of the Power Converters
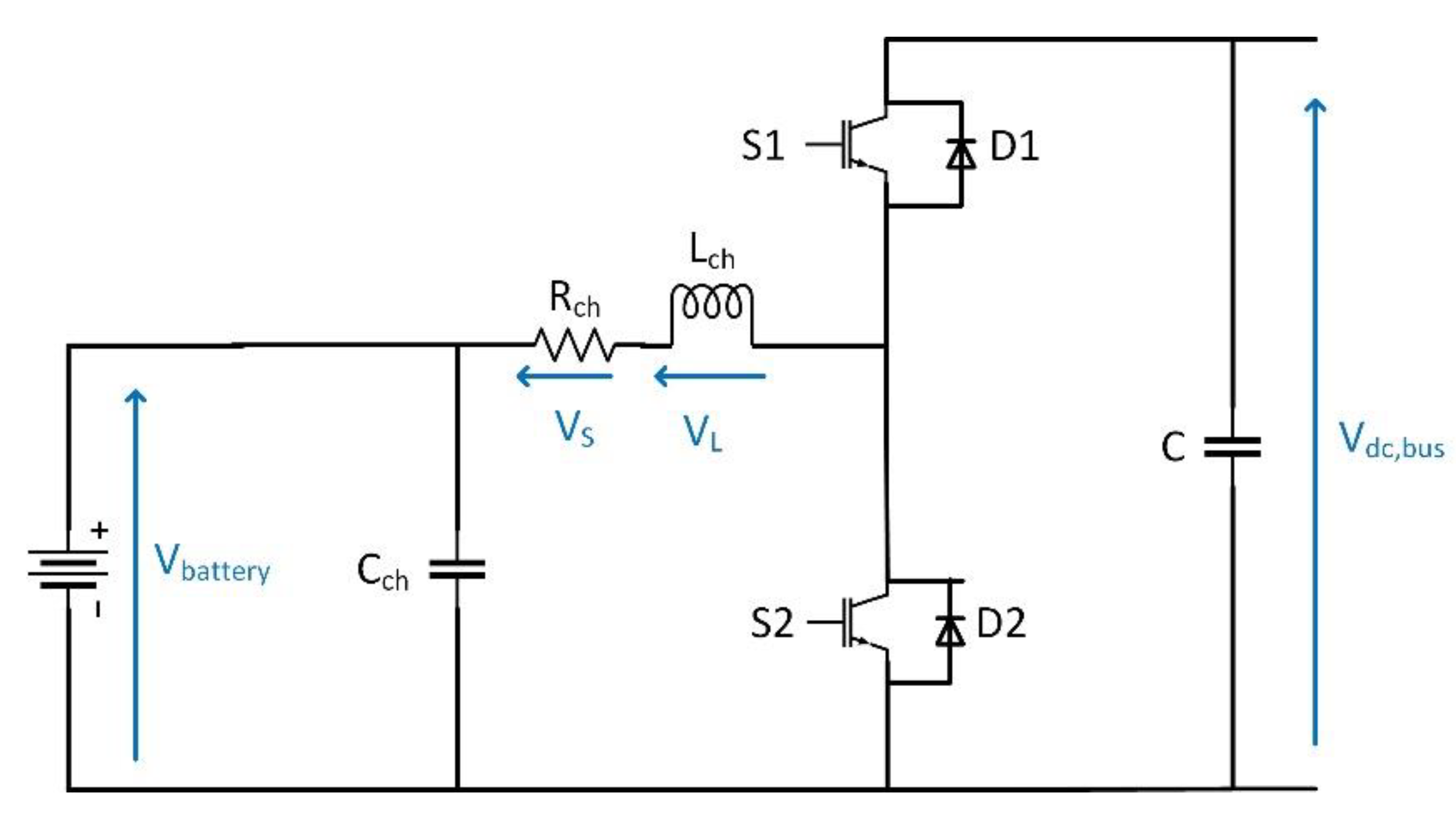
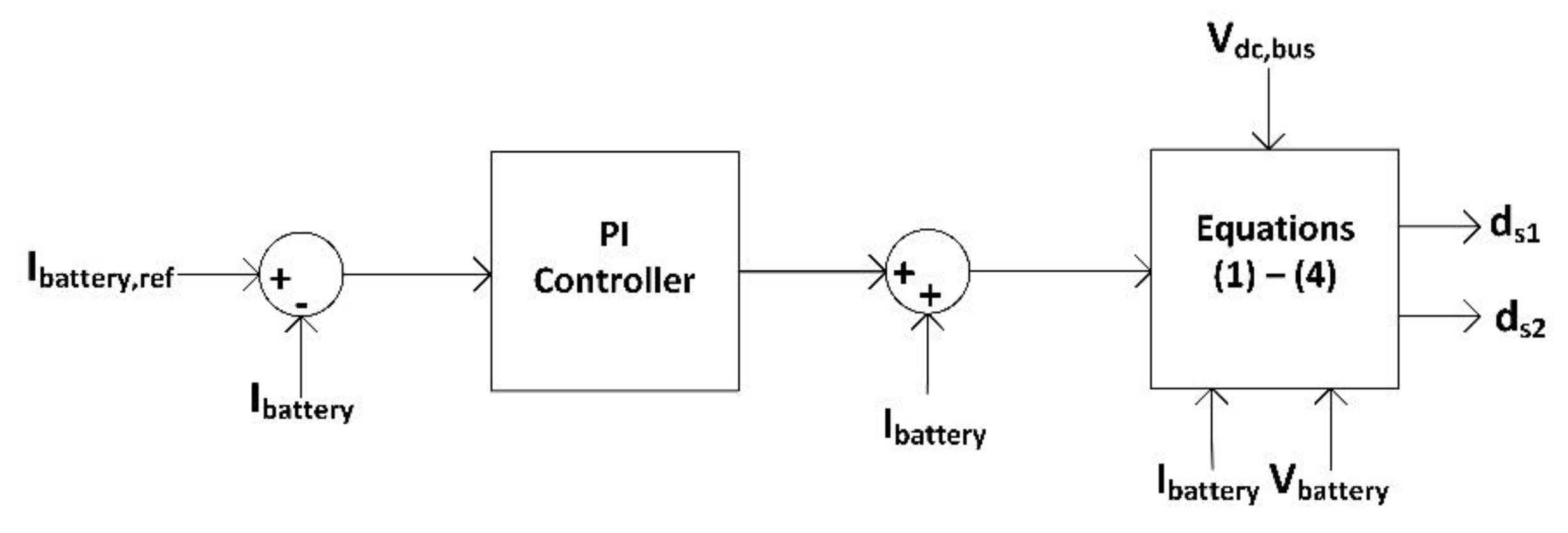
3.1. The Bidirectional DC-DC Converter
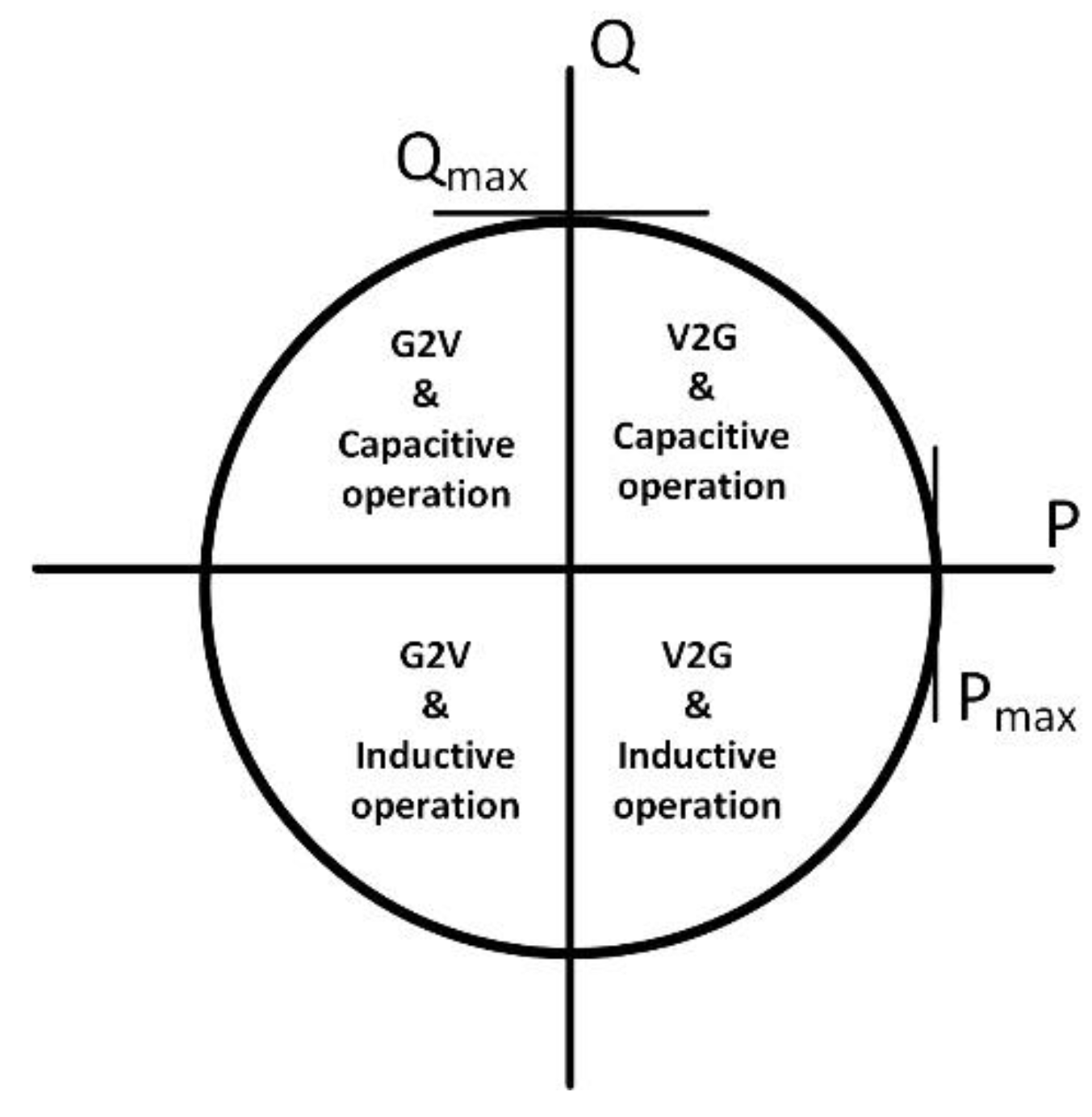
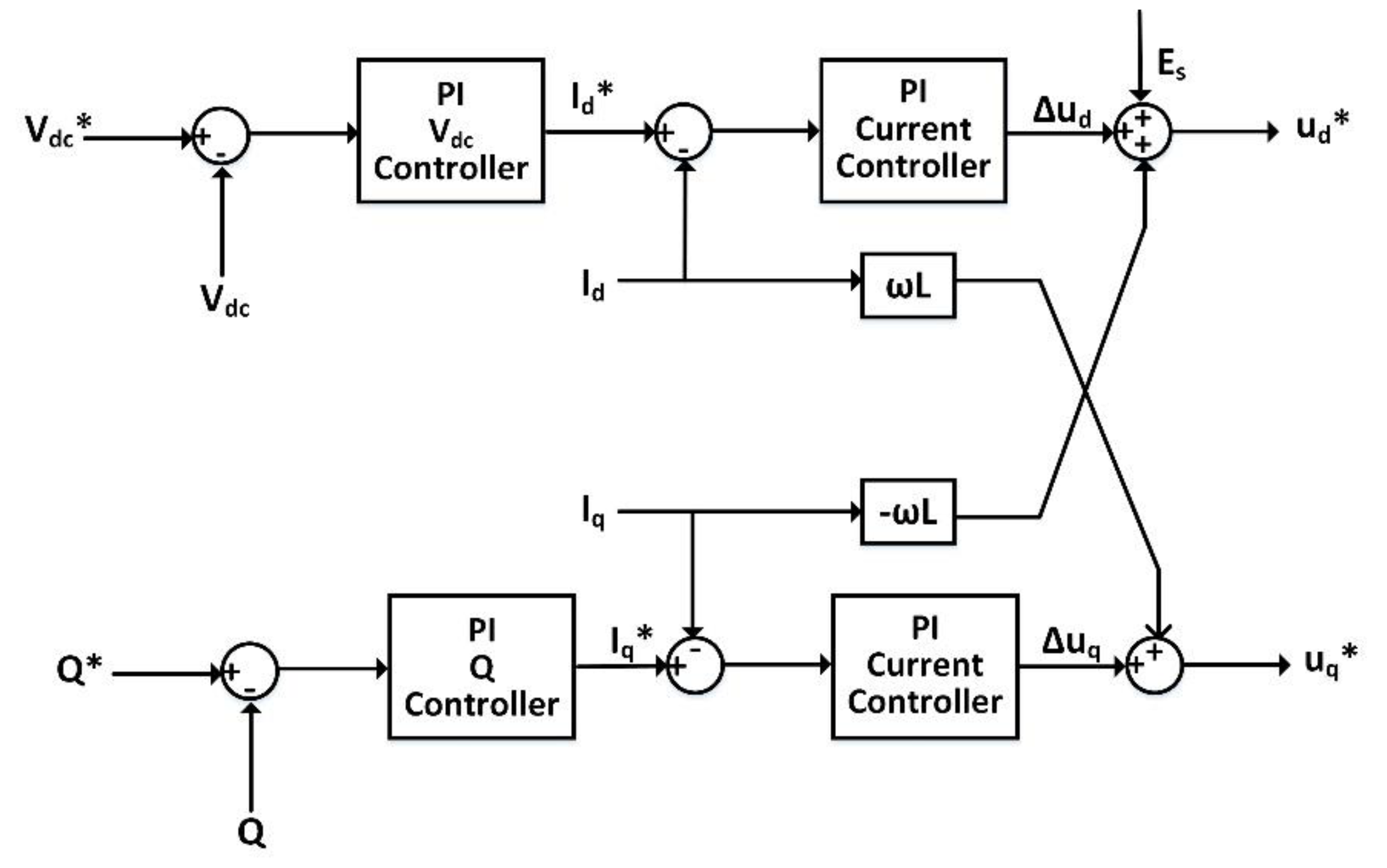
3.2. The DC-AC Inverter
4. Voltage Regulation
4.1. Theoretical Analysis Neglecting the Resistive Component of the Power Grid Impedance
4.2. Theoretical Analysis Neglecting the Inductive Component of the Power Grid Impedance
4.3. Theoretical Analysis Taking into Consideration Both the Inductive and Resistive Components of the Grid Impedance
5. Simulation Results
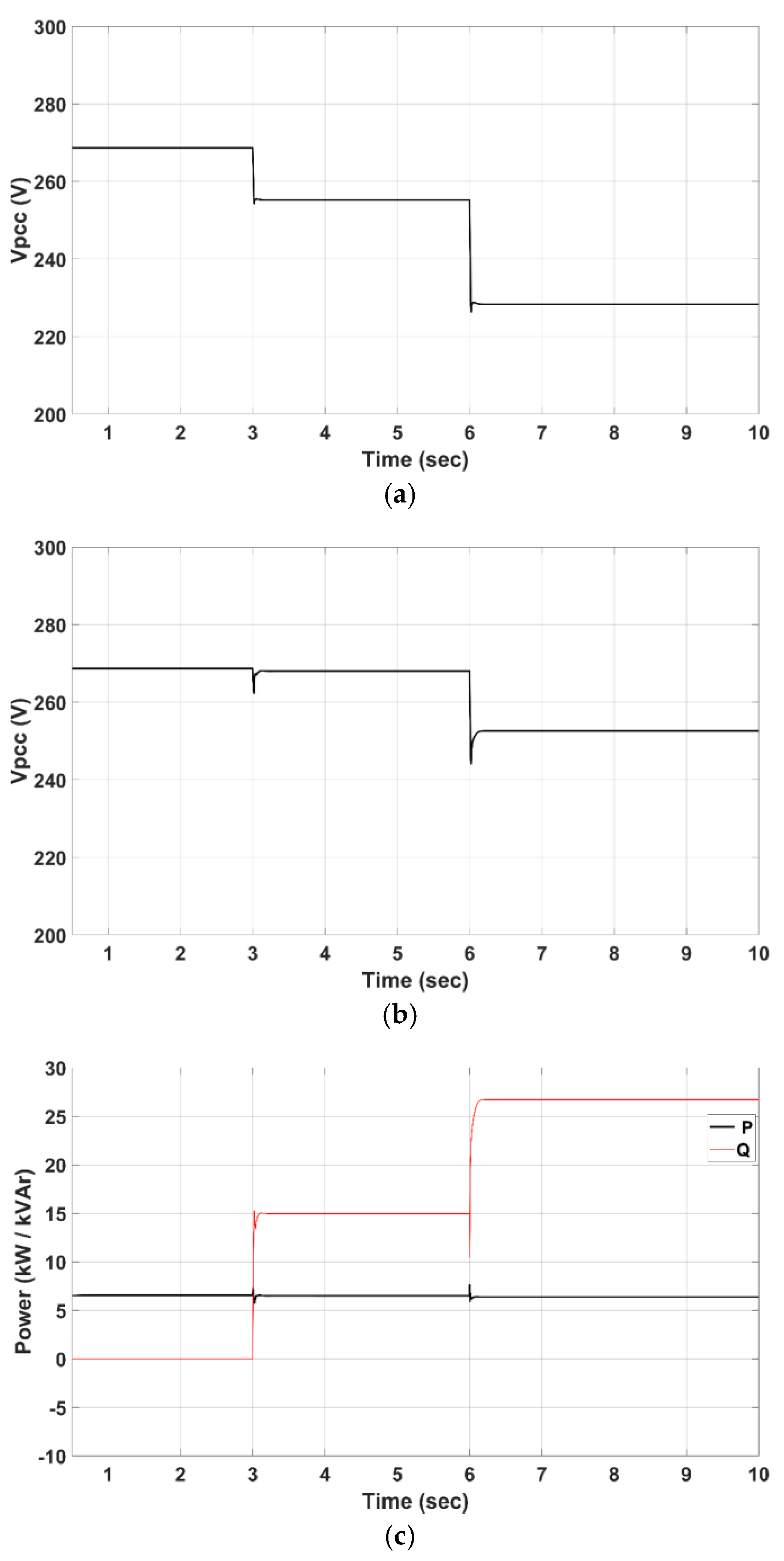
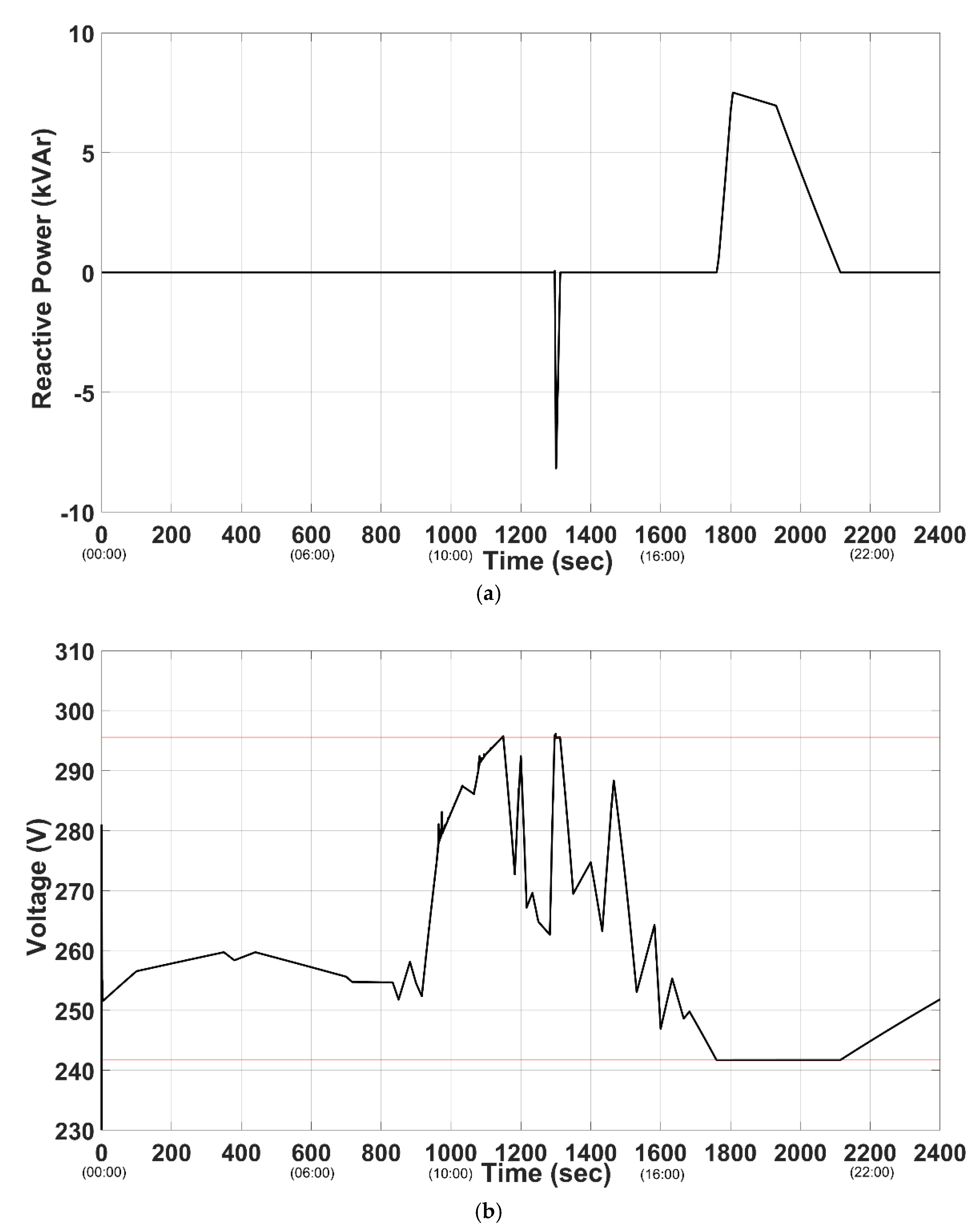
5.1. Reactive Power Control and Pure Inductive Power Grid Impedance
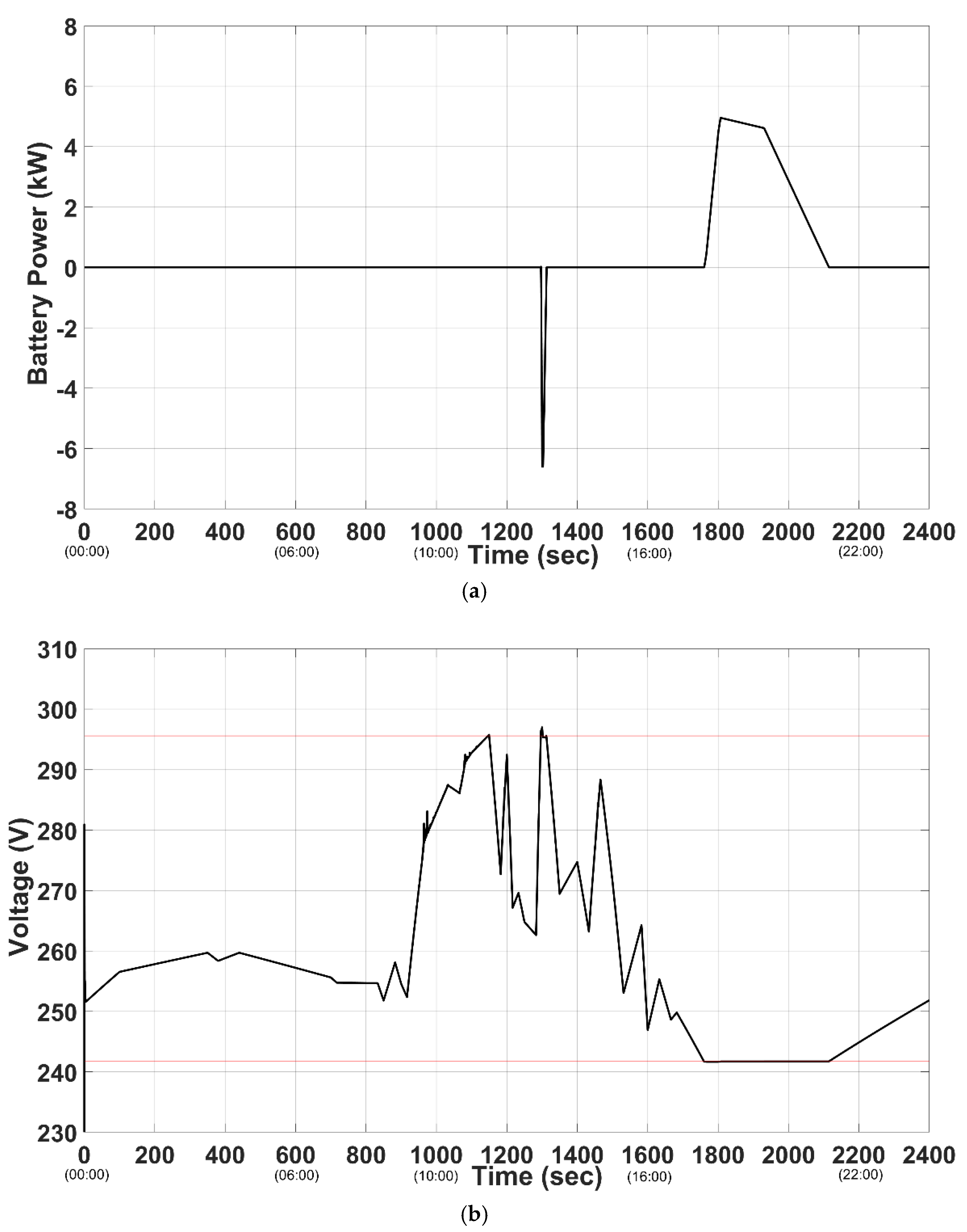
5.2. Comparison between Active and Reactive Power Support
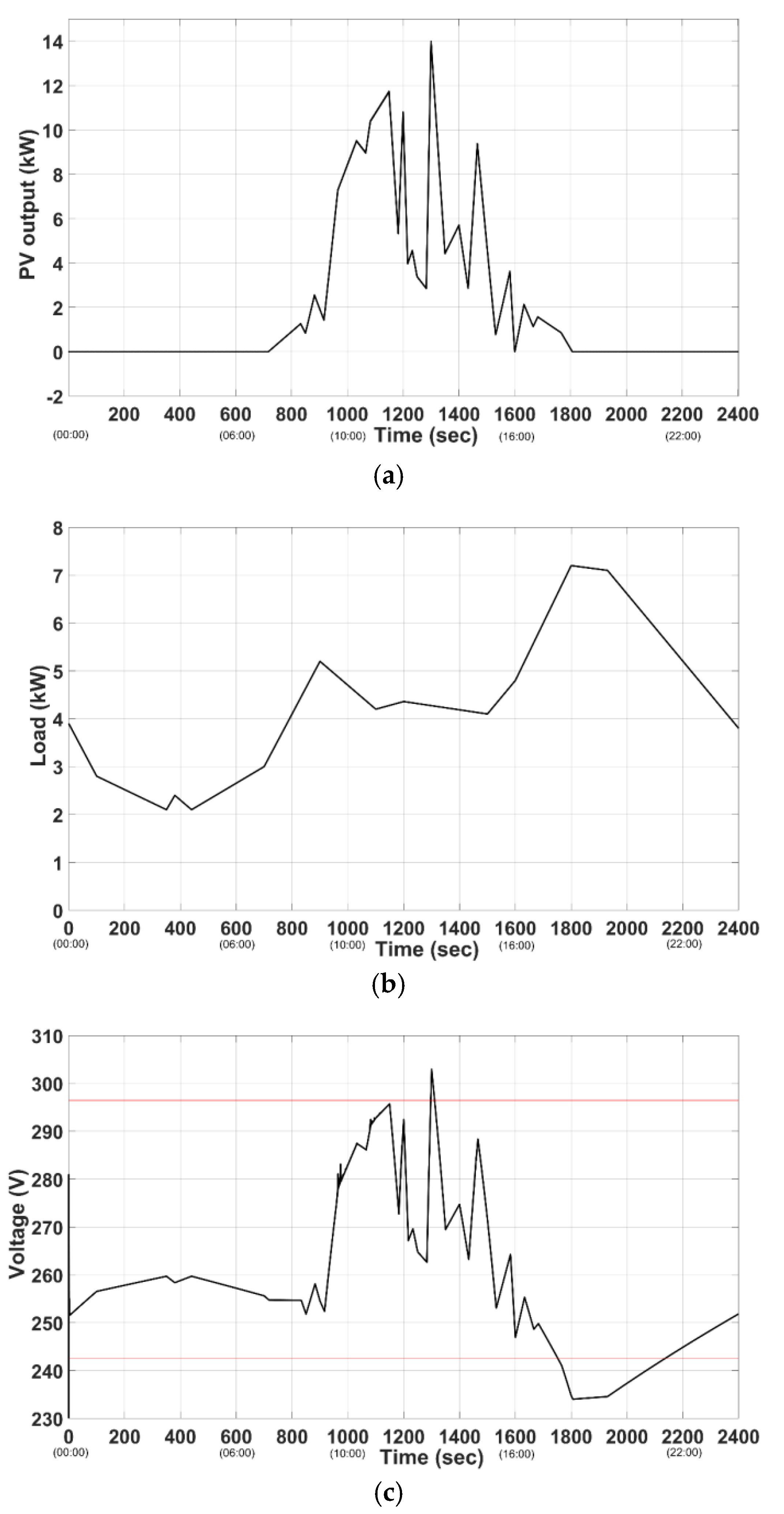
5.3. Provision of Voltage Regulation by Exchanging Both Active and Reactive Power
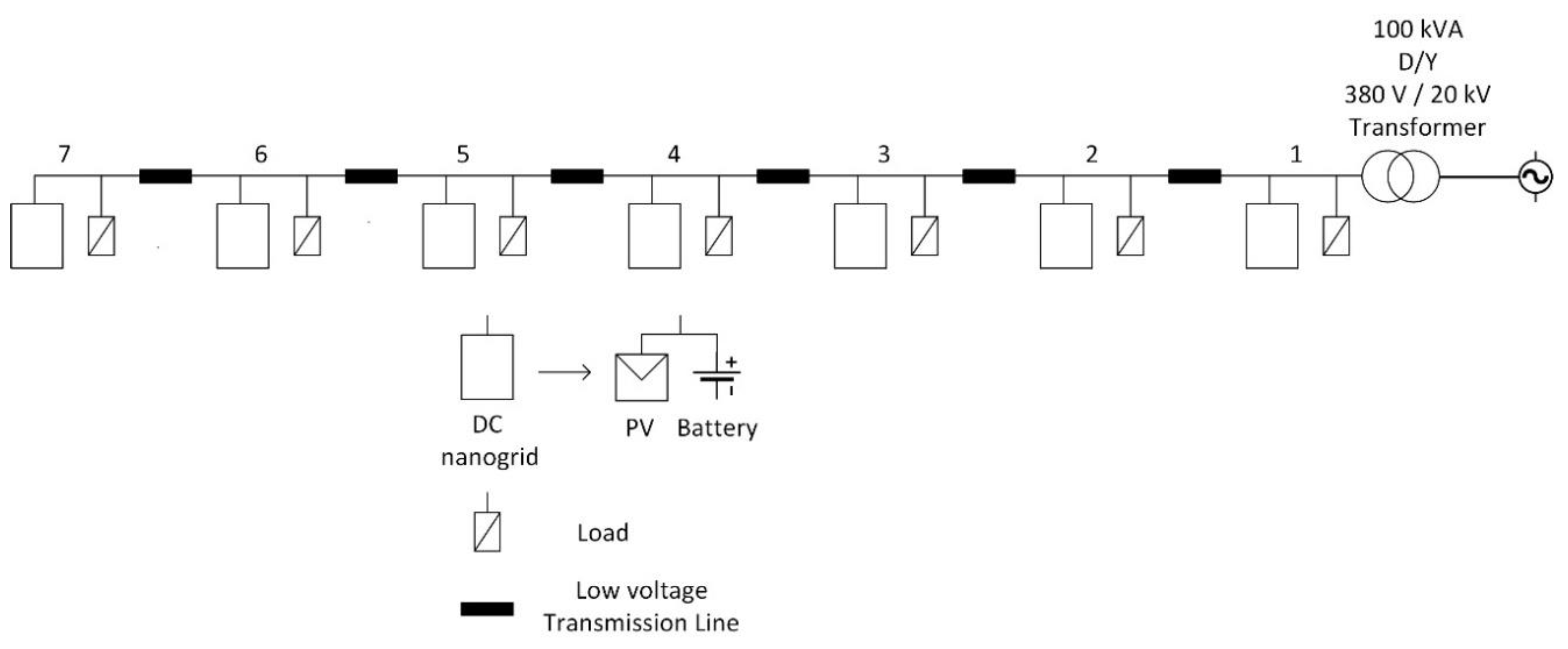
5.4. Voltage Regulation in a Radial Distribution Power Grid
6. Conclusions
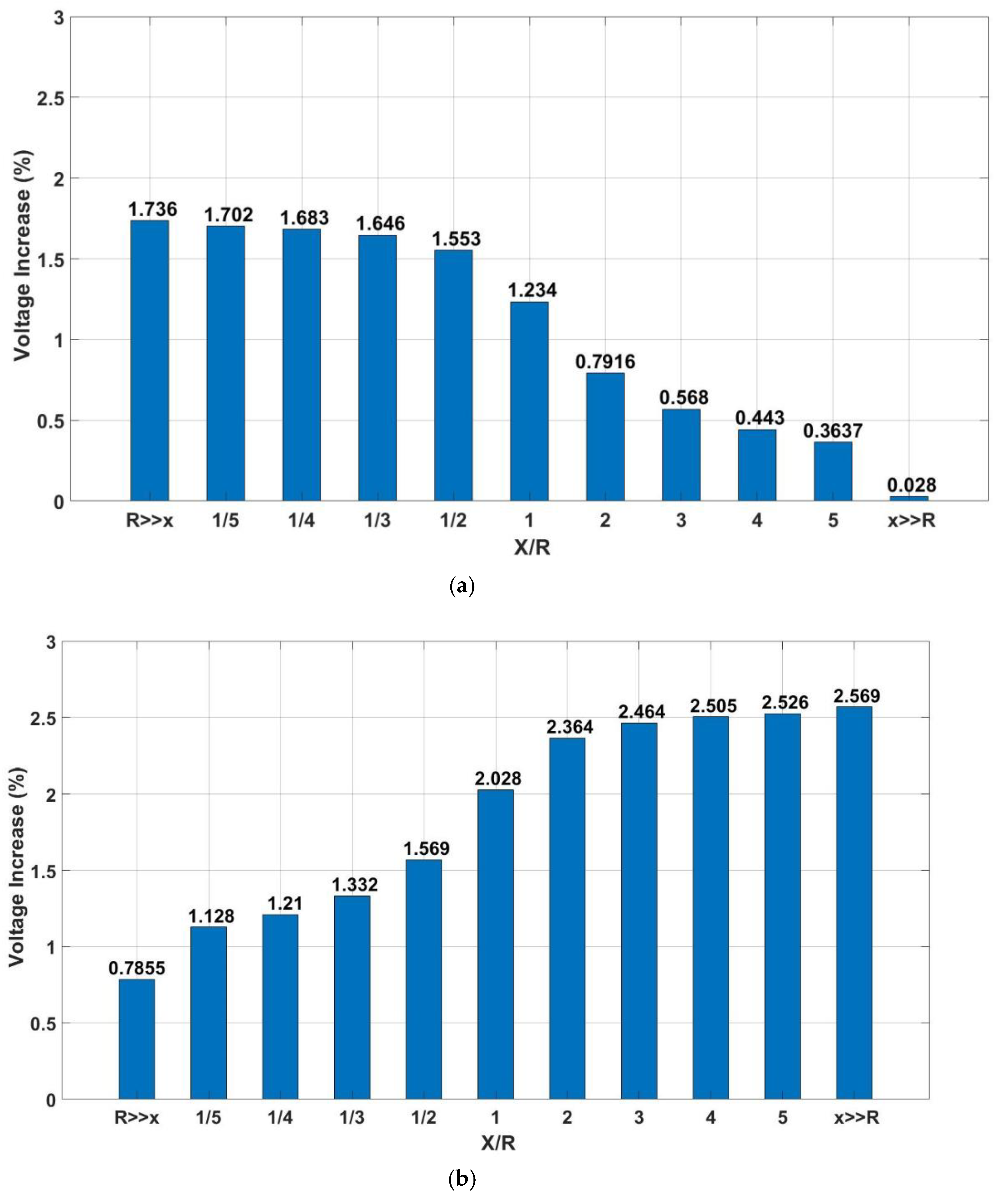
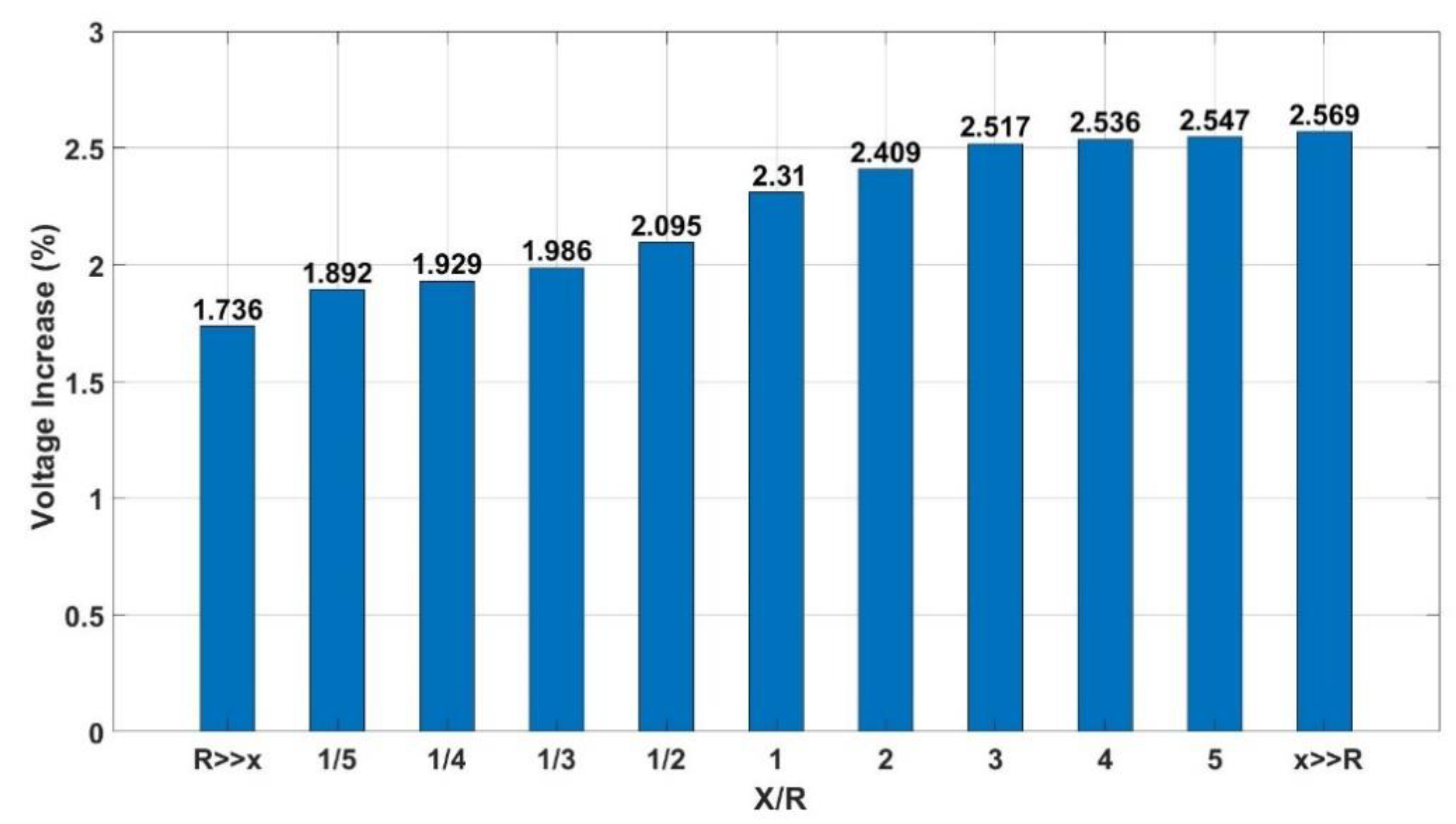
- The line impedance affected the impact of voltage regulation.
- The transformers increased the efficiency of the voltage regulation when the reactive power was adjusted due to the inductive nature of the winding. Thus, this should be taken into consideration especially at the buses that are near the transformers.
- Simultaneously active and reactive power exchange increased the impact of the voltage regulation in comparison to exclusively active or reactive power transfer. More research could be conducted taking into consideration more parameters such as the distance from the transformer as well as the inductance of its windings.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Maximum Power (STC) | 200.143 | W |
| Current at Maximum Power Point | 7.61 | A |
| Voltage at Maximum Power Point | 26.3 | V |
| Short-Circuit Current | 8.21 | A |
| Open-Circuit Voltage | 32.9 | V |
| Cells | 54 | - |
| Shunt Resistance | 0.221 | Ohm |
| Parallel Resistance | 415.405 | Ohm |
| Diode ideality factor | 1.3 | - |
| Temperature coefficient of Current | 0.0032 | A/K |
| Temperature coefficient of Voltage | −0.1230 | V/K |
| Parameters | Value | Measurement Unit |
|---|---|---|
| Maximum Power (STC) | 21 | kW |
| Current at Maximum Power Point | 114.15 | A |
| Voltage at Maximum Power Point | 184.1 | V |
| Series Connected Modules | 7 | - |
| Parallel Connected Modules | 15 | - |
| Parameter | Value | Measurement Unit |
|---|---|---|
| Battery Type | Li-Ion | - |
| Nominal Voltage | 355.2 | V |
| Maximum Voltage | 393.6 | V |
| Minimum Voltage | 259 | |
| Rated Energy | 18.8 | kWh |
| Rated Capacity | 60 | Ah |
| Number of Cells | 96 | - |
| Minimum Cell Voltage | 2.7 | V |
| Maximum Cell Voltage | 4.1 | V |
| Internal Resistance | 120 | mOhm |
| Mass | 235 | kg |
| Volume | 190.9 | L |
| Parameters | Value | Measurement Unit |
|---|---|---|
| Rated Power | 6.6 | kW |
| Switching Frequency | 10 | kHz |
| Inductance Value | 17 | mH |
| Capacitance | 100 | μF |
| Parallel Connected Modules | 15 | - |
| Parameter | Value | Measurement Unit |
|---|---|---|
| Maximum Power | 27.6 | kW |
| DC Bus Voltage | 700 | V |
| DC Bus Capacitor | 2.4 | mF |
| Switching Frequency | 5050 | Hz |
| Line to Line Grid Voltage | 400 | V |
| Power Grid Frequency | 60 | Hz |
| Parameter | Value | Measurement Unit |
|---|---|---|
| Inverter-Side Inductor | 1.2 | mH |
| Grid-Side Inductor | 0.57 | mH |
| Inverter-Side Resistor | 0.01 | Ohm |
| Grid-Side Resistor | 0.005 | Ohm |
| Capacitor | 10.4 | μF |
| Resonance Frequency | 2515 | Hz |
| Damping Resistor | 2.019 | Ohm |
References
- Carpintero-Rentería, M.; Santos-Martín, D.; Guerrero, J.M. Microgrids Literature Review through a Layers Structure. Energies 2019, 12, 4381. [Google Scholar] [CrossRef] [Green Version]
- Burmester, D.; Rayudu, R.; Seah, W.; Akinyele, D. A review of nanogrid topologies and technologies. Renew. Sustain. Energy Rev. 2017, 67, 760–775. [Google Scholar] [CrossRef]
- Chandrasena, R.P.S.; Shahnia, F.; Ghosh, A.; Rajakaruna, S. Operation and control of a hybrid AC-DC nanogrid for future community houses. In Proceedings of the 2014 Australasian Universities Power Engineering Conference (AUPEC), Perth, WA, Australia, 28 September–1 October 2014; pp. 1–6. [Google Scholar]
- Goikoetxea, A.; Canales, J.M.; Sanchez, R.; Zumeta, P. DC versus AC in residential buildings: Efficiency comparison. In Proceedings of the Eurocon 2013, Zagreb, Croatia, 10 October 2013; pp. 1–5. [Google Scholar]
- Alsaidan, I.; Alanazi, A.; Gao, W.; Wu, H.; Khodaei, A. State-of-the-Art in Microgrid-Integrated Distributed Energy Storage Sizing. Energies 2017, 10, 1421. [Google Scholar] [CrossRef] [Green Version]
- Skouros, I.; Bampoulas, A.; Karlis, A. A bidirectional dual active bridge converter for V2G applications based on DC microgrid. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 24 May 2018; pp. 1–9. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Shafiee, S.; Fotuhi-Firuzabad, M.; Rastegar, M. Investigating the Impacts of Plug-in Hybrid Electric Vehicles on Power Distribution Systems. IEEE Trans. Smart Grid 2013, 4, 1351–1360. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load Frequency Control in Isolated Micro-Grids with Electrical Vehicles Based on Multivariable Generalized Predictive Theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of benefits and challenges of vehicle-to-grid technology. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 1 September 2012; pp. 3082–3089. [Google Scholar]
- Mwasilu, F.; Justo, J.J.; Kim, E.-K.; Do, T.D.; Jung, J.-W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- An, K.; Song, K.-B.; Hur, K. Incorporating Charging/Discharging Strategy of Electric Vehicles into Security-Constrained Optimal Power Flow to Support High Renewable Penetration. Energies 2017, 10, 729. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Scheduling of Vehicle-to-Grid Energy and Ancillary Services. IEEE Trans. Smart Grid 2012, 3, 351–359. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-Time Smart Charging of Electric Vehicles for Demand Charge Reduction at Non-Residential Sites. IEEE Trans. Smart Grid 2018, 9, 4027–4037. [Google Scholar] [CrossRef]
- Takagi, M.; Iwafune, Y.; Yamaji, K.; Yamamoto, H.; Okano, K.; Hiwatari, R.; Ikeya, T. Electricity pricing for PHEV bottom charge in daily load curve based on variation method. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 3 April 2012; pp. 1–6. [Google Scholar]
- Mei, P.; Wu, L.; Zhang, H.; Liu, Z. A Hybrid Multi-Objective Crisscross Optimization for Dynamic Economic/Emission Dispatch Considering Plug-in Electric Vehicles Penetration. Energies 2019, 12, 3847. [Google Scholar] [CrossRef] [Green Version]
- Bampoulas, A.; Karlis, A. Provision of frequency regulation by a residential microgrid integrating PVs, energy storage and electric vehicle. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 1 June 2017; pp. 1–6. [Google Scholar]
- Chen, L.; Jiang, Y.; Li, X.; Yao, L.; Xu, X.; Geng, T. Frequency regulation strategy for decentralized V2G control. In Proceedings of the 2015 5th International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (DRPT), Changsha, China, 26–29 November 2015; pp. 2626–2629. [Google Scholar]
- Mao, T.; Lau, W.H.; Shum, C.; Chung, H.; Tsang, K.F.; Tse, N.C.F. A new schedule-controlled strategy for charging large number of EVs with load shifting and voltage regulation. In Proceedings of the 2015 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Brisbane, QLD, Australia, 15–18 November 2015; pp. 1–5. [Google Scholar]
- Wu, X.; Li, L.; Zou, J.; Zhang, G. EV-Based Voltage Regulation in Line Distribution Grid. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 25 July 2016; pp. 1–6. [Google Scholar]
- Keane, E.; Flynn, D. Potential for electric vehicles to provide power system reserve. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 Jane 2012; pp. 1–7. [Google Scholar]
- Denholm, P.; Short, W. An Evaluation of Utility System Impacts and Benefits of Optimally Dispatched Plug-in Hybrid Electric Vehicles; National Renewable Energy Laboratory: Golden, CO, USA, 2007. [Google Scholar]
- Marra, F.; Yang, G.Y.; Fawzy, Y.T.; Traeholt, C.; Larsen, E.; Garcia-Valle, R.; Jensen, M.M. Improvement of Local Voltage in Feeders with Photovoltaic Using Electric Vehicles. IEEE Trans. Power Syst. 2013, 28, 3515–3516. [Google Scholar] [CrossRef]
- Carvalho, P.M.S.; Correia, P.F.; Ferreira, L.A.F. Distributed Reactive Power Generation Control for Voltage Rise Mitigation in Distribution Networks. IEEE Trans. Power Syst. 2008, 23, 766–772. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. Bi-directional electric vehicle fast charging station with novel reactive power compensation for voltage regulation. Int. J. Electr. Power Energy Syst. 2015, 64, 300–310. [Google Scholar] [CrossRef]
- Nordman, B.; Christensen, K. Local power distribution with nanogrids. In Proceedings of the 2013 International Green Computing Conference Proceedings, Arlington, VA, USA, 27–29 June 2013; pp. 1–8. [Google Scholar]
- Werth, A.; André, A.; Kawamoto, D.; Morita, T.; Tajima, S.; Tokoro, M.; Yanagidaira, D.; Tanaka, K. Peer-to-Peer Control System for DC Microgrids. IEEE Trans. Smart Grid 2018, 9, 3667–3675. [Google Scholar] [CrossRef]
- Skouros, I.; Karlis, A. Design Methodology of a DC Nanogrid incorporating the V2G Technology. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 5777–5782. [Google Scholar]
- Chen, M.; Rincon-Mora, G.A. Accurate Electrical Battery Model Capable of Predicting Runtime and I–V Performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Park, M.-Y.; Chi, M.-H.; Park, J.-H.; Kim, H.-G.; Chun, T.-W.; Nho, E.-C. LCL-filter Design for Grid-Connected PCS Using Total Harmonic Distortion and Ripple Attenuation Factor. In Proceedings of the 2010 International Power Electronics Conference—ECCE ASIA, Sapporo, Japan, 21–24 June 2010; pp. 1688–1694. [Google Scholar]
- Khan, S.; Mehmood, K.; Haider, Z.; Bukhari, S.; Lee, S.-J.; Rafique, M.; Kim, C.-H. Energy Management Scheme for an EV Smart Charger V2G/G2V Application with an EV Power Allocation Technique and Voltage Regulation. Appl. Sci. 2018, 8, 648. [Google Scholar] [CrossRef] [Green Version]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of Current Controllers for Distributed Power Generation Systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Camacho, A.; Castilla, M.; Miret, J.; Vasquez, J.C.; Alarcon-Gallo, E. Flexible Voltage Support Control for Three-Phase Distributed Generation Inverters under Grid Fault. IEEE Trans. Ind. Electron. 2013, 60, 1429–1441. [Google Scholar] [CrossRef]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. EV/PHEV Bidirectional Charger Assessment for V2G Reactive Power Operation. IEEE Trans. Power Electron. 2013, 28, 5717–5727. [Google Scholar] [CrossRef]
- Choi, W.; Lee, W.; Sarlioglu, B. Reactive power compensation of grid-connected inverter in vehicle-to-grid application to mitigate balanced grid voltage sag. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Laaksonen, H.; Saari, P.; Komulainen, R. Voltage and frequency control of inverter based weak LV network microgrid. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005. [Google Scholar]
- Weedy, B.M.; Cory, B.J. Electric Power Systems, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 1998. [Google Scholar]
















| X/R Ratio | Active Power (kW) | Reactive Power (kVAr) |
|---|---|---|
| X >> R | 0 | 6600 |
| 1 | 4666.9 | 466.9 |
| 2 | 2951,6 | 5903.21 |
| 3 | 2087.1 | 6261 |
| 4 | 1600 | 6402 |
| 5 | 1294 | 6471.6 |
| 1/2 | 5903.21 | 2951.6 |
| 1/3 | 6261 | 2087.1 |
| 1/4 | 6402 | 1600 |
| 1/5 | 6471 | 1294 |
| R >> X | 6600 | 0 |
| Parameter | Positive Sequence | Zero Sequence |
|---|---|---|
| Resistance | 0.520 Ω/km | 0.998 Ω/km |
| Inductance | 0.305 Ω/km | 0.915 Ω/km |
| Capacitance | 12.2 nF/km | 5.5 nf/km |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skouros, I.; Karlis, A. A Study on the V2G Technology Incorporation in a DC Nanogrid and on the Provision of Voltage Regulation to the Power Grid. Energies 2020, 13, 2655. https://doi.org/10.3390/en13102655
Skouros I, Karlis A. A Study on the V2G Technology Incorporation in a DC Nanogrid and on the Provision of Voltage Regulation to the Power Grid. Energies. 2020; 13(10):2655. https://doi.org/10.3390/en13102655
Chicago/Turabian StyleSkouros, Ioannis, and Athanasios Karlis. 2020. "A Study on the V2G Technology Incorporation in a DC Nanogrid and on the Provision of Voltage Regulation to the Power Grid" Energies 13, no. 10: 2655. https://doi.org/10.3390/en13102655
APA StyleSkouros, I., & Karlis, A. (2020). A Study on the V2G Technology Incorporation in a DC Nanogrid and on the Provision of Voltage Regulation to the Power Grid. Energies, 13(10), 2655. https://doi.org/10.3390/en13102655