Voltage Transients Mitigation in the DC Distribution Network of More/All Electric Aircrafts





Abstract
:1. Introduction
2. More/All Electric Aircraft System Description
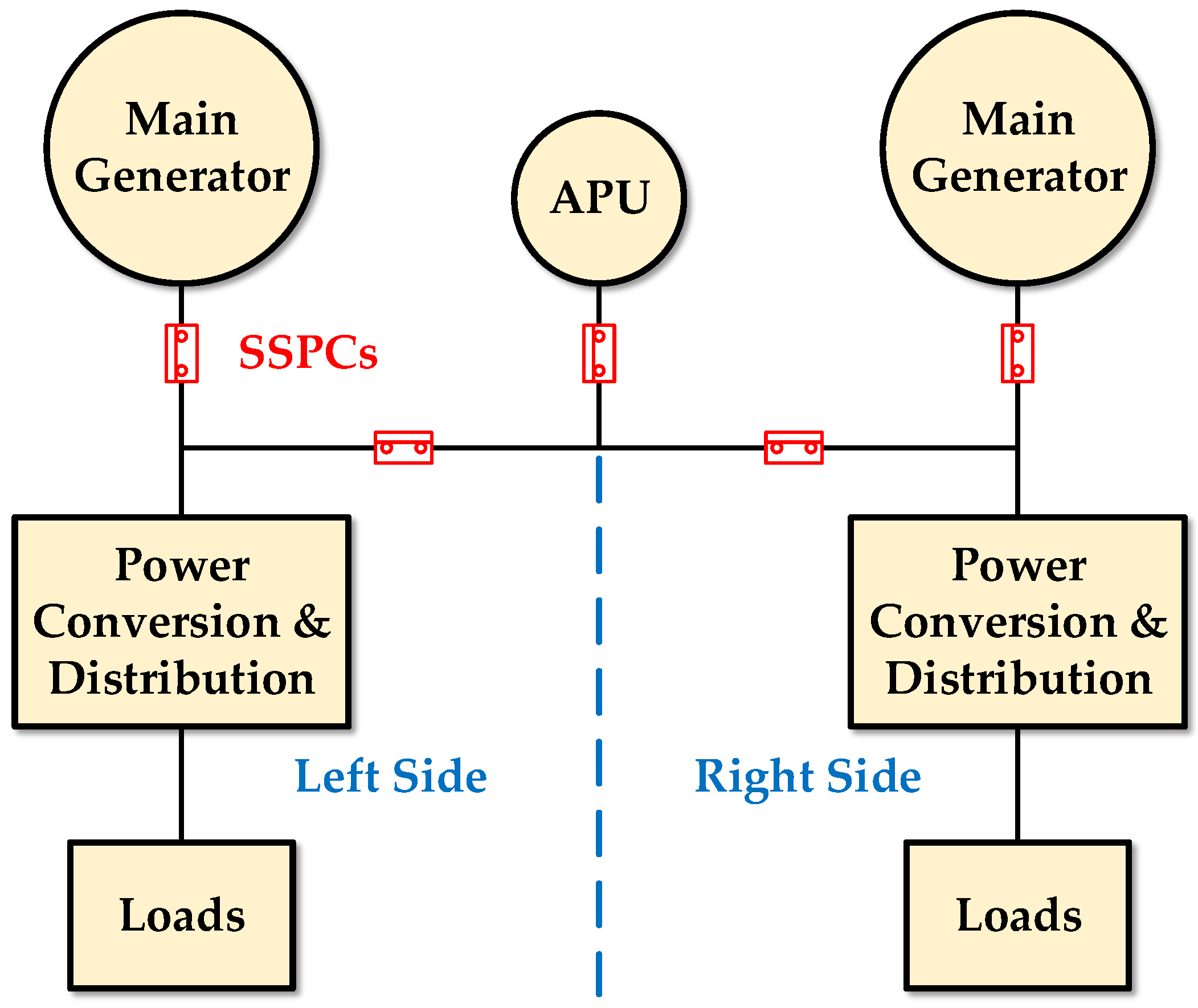
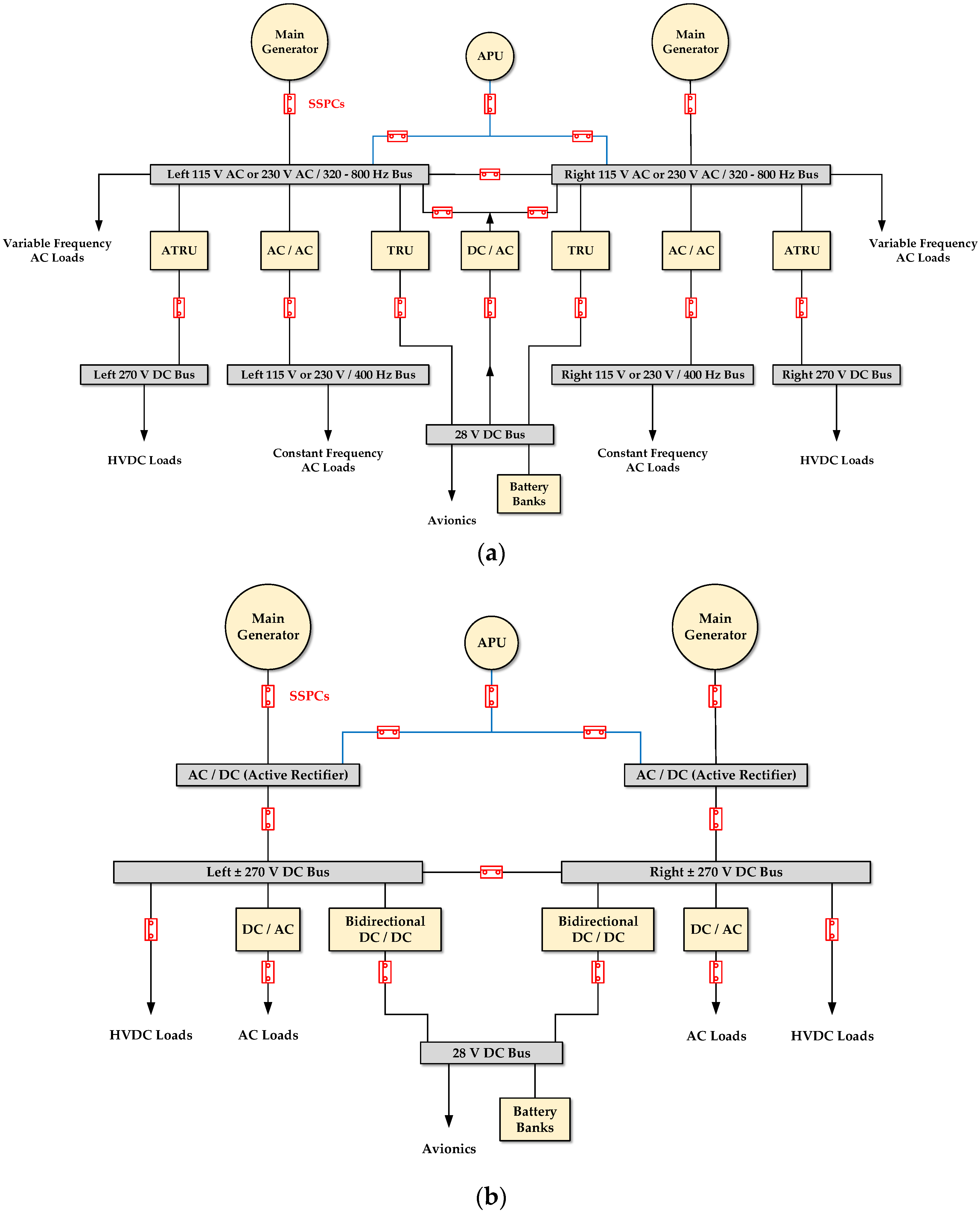
2.1. General Description
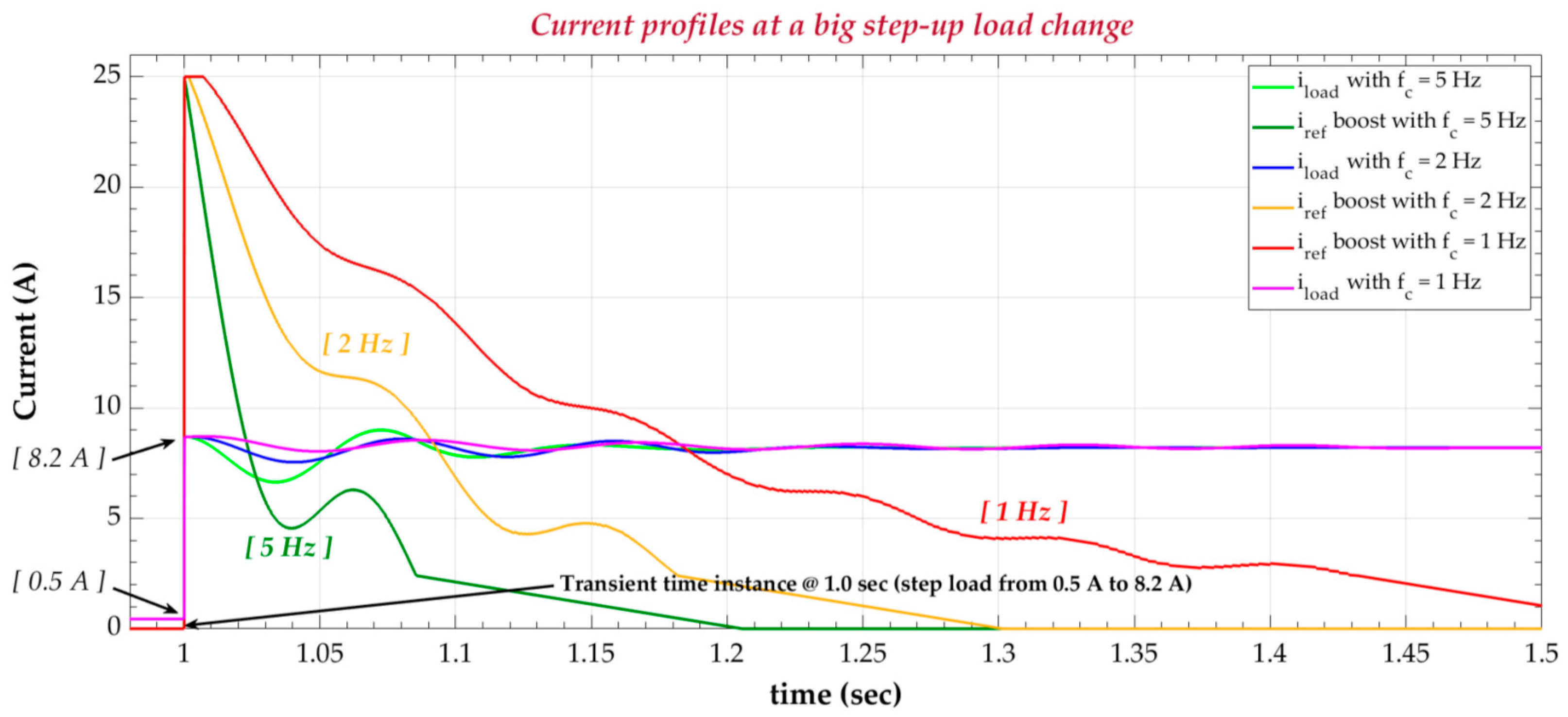
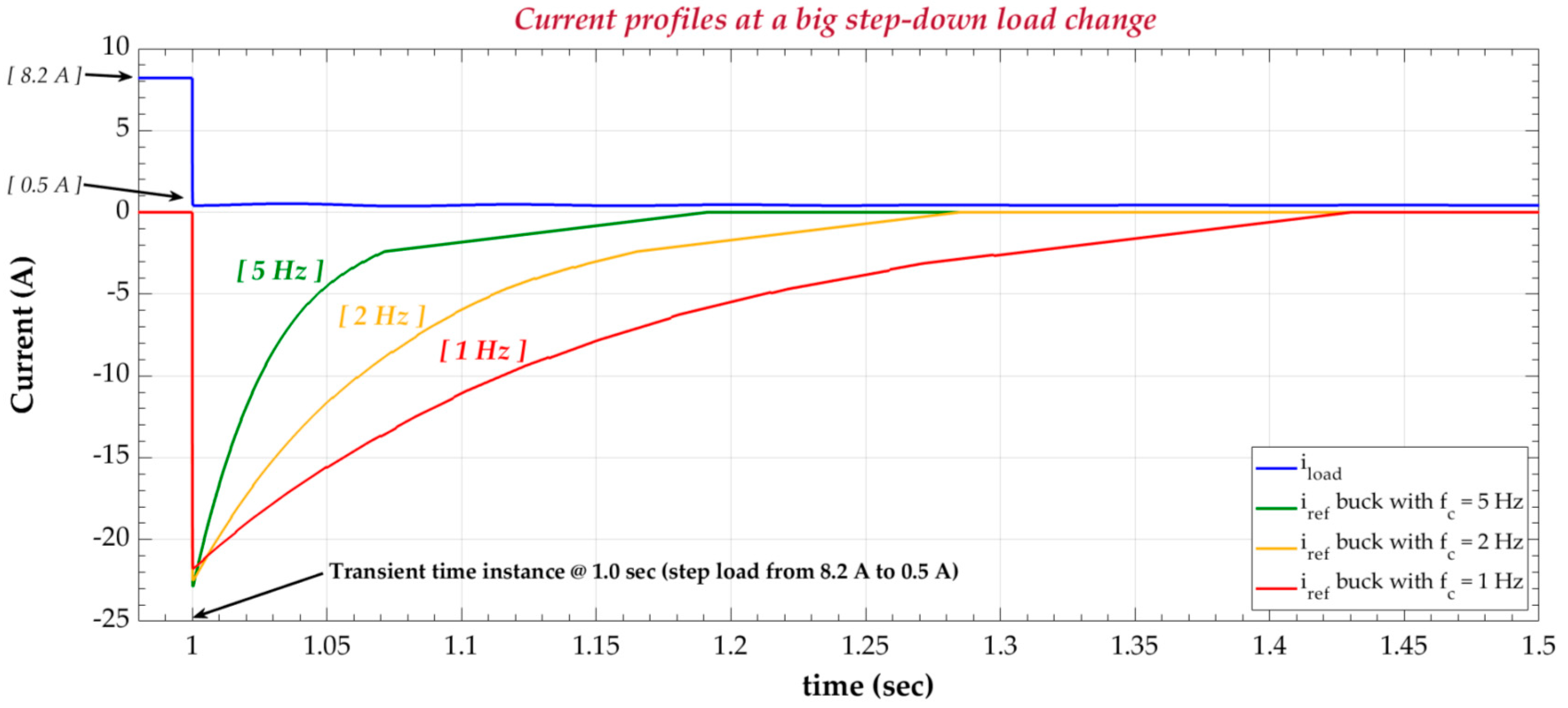
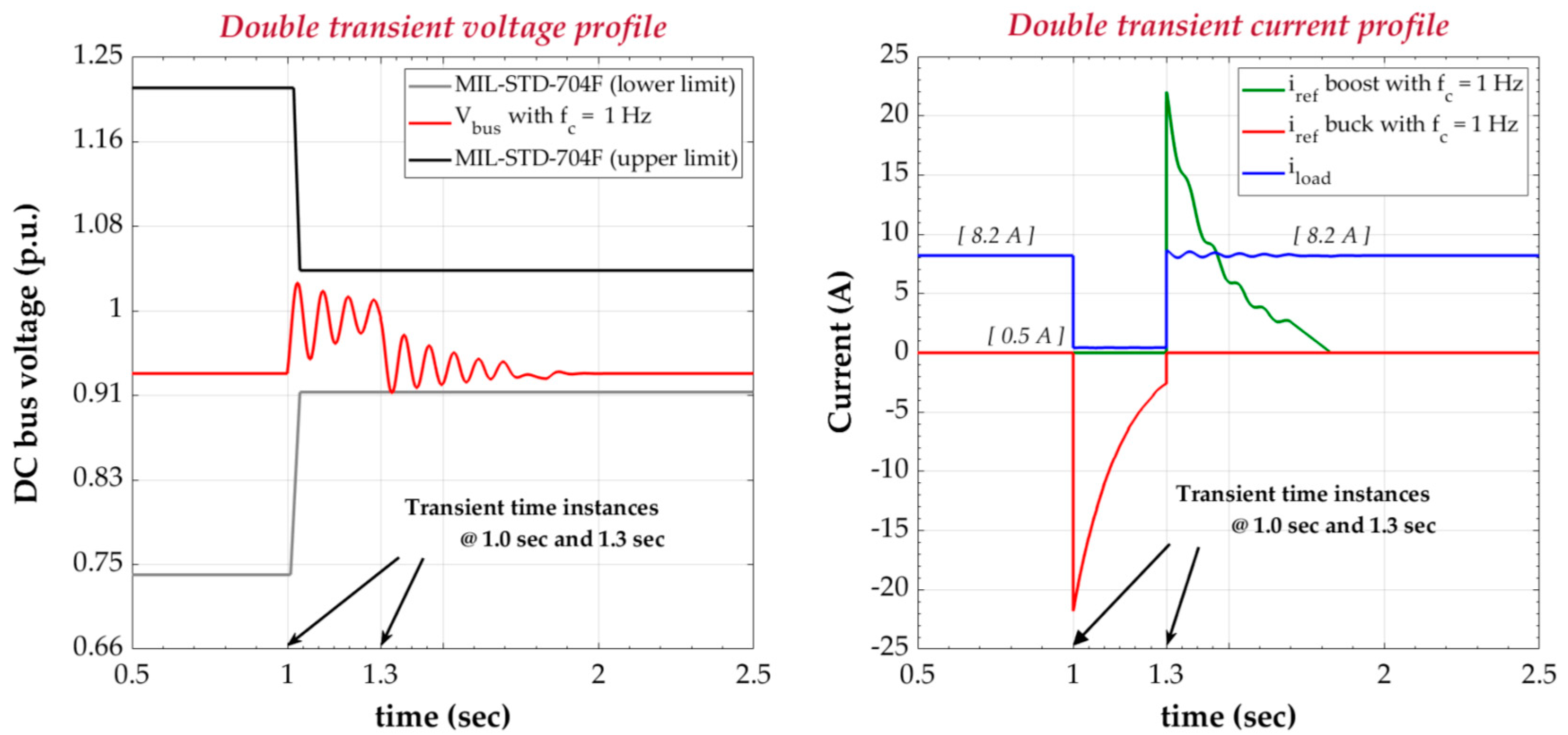
2.2. Voltage Transients
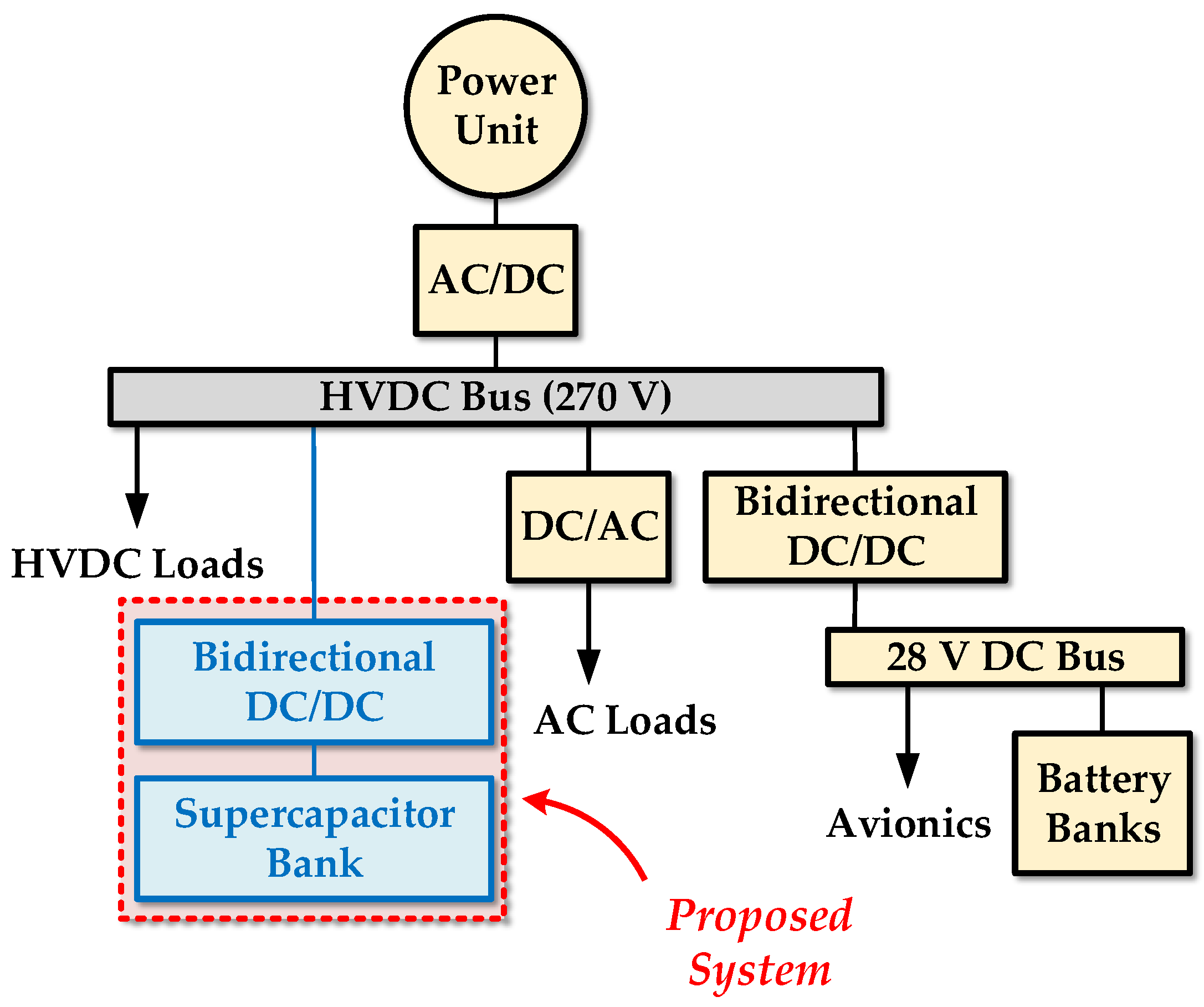
3. Proposed System Description
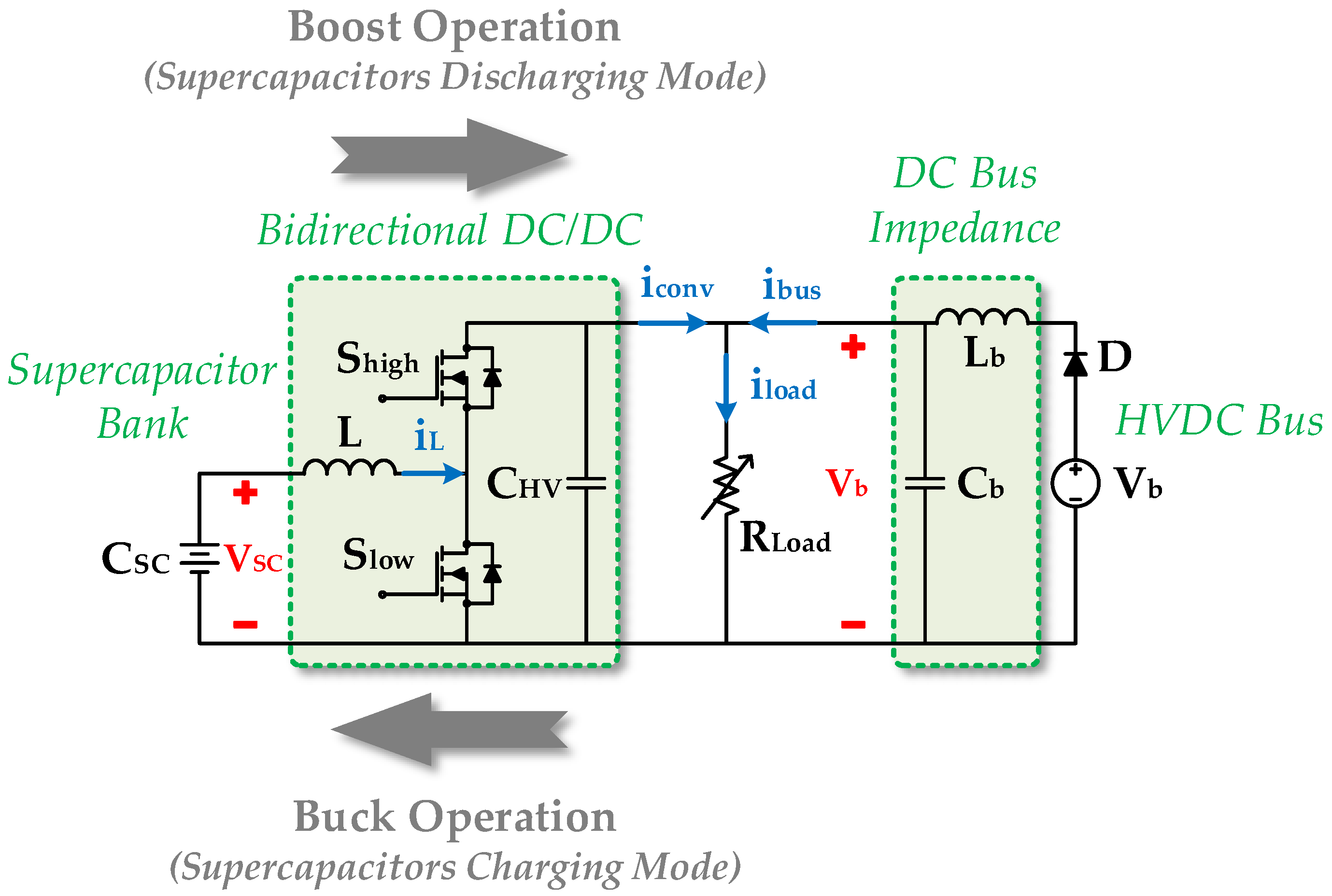
3.1. Bidirectional Buck-Boost Converter
3.2. Supercapacitor Bank
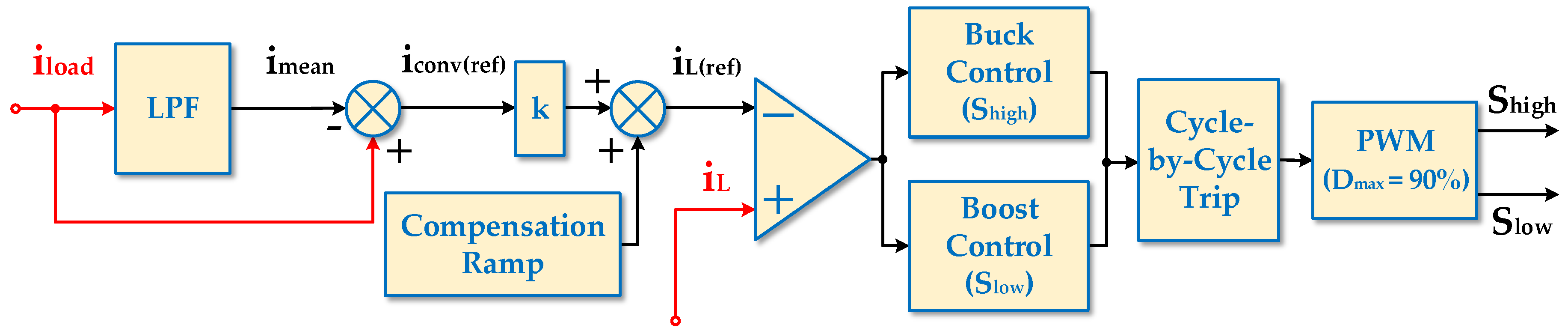
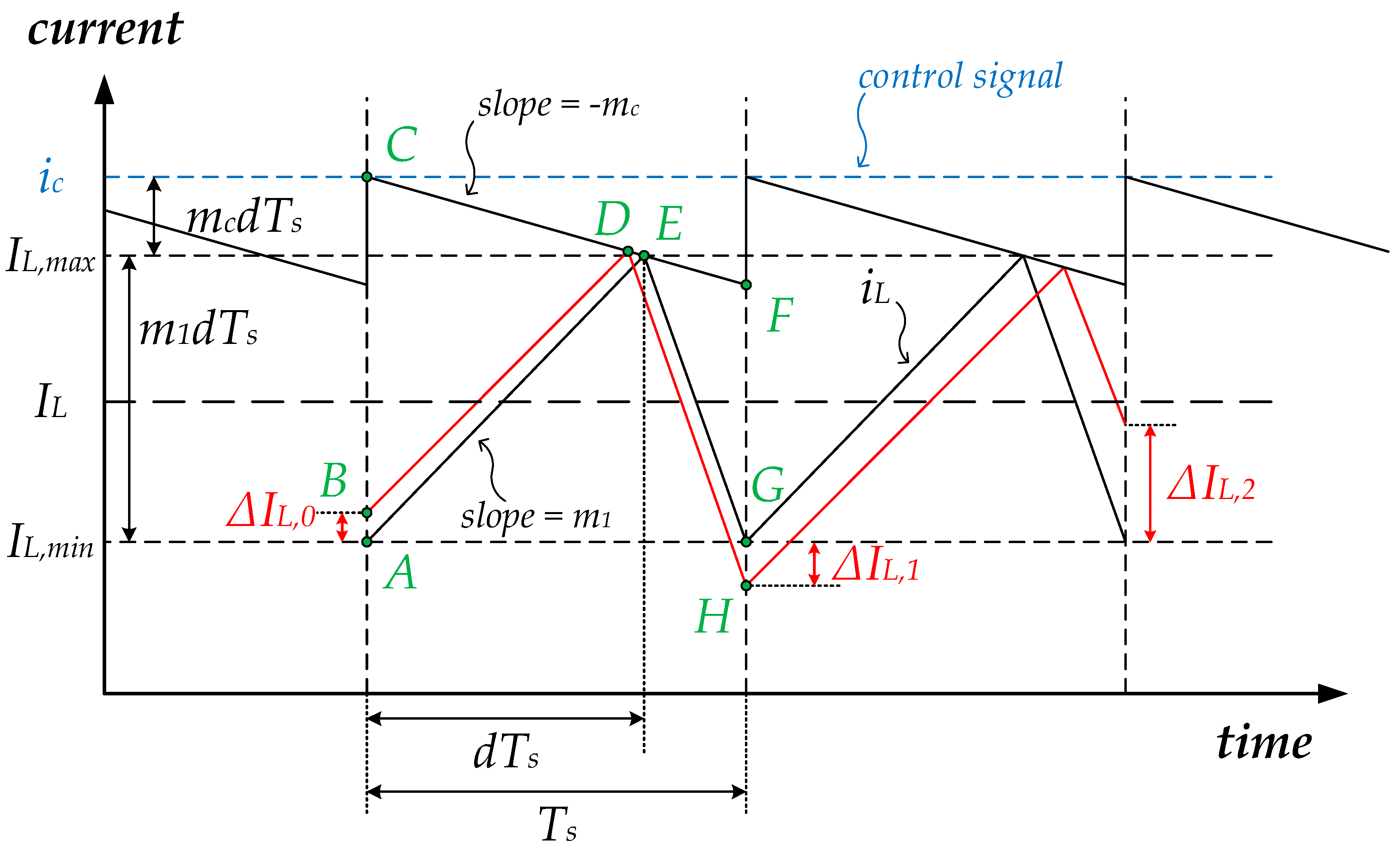
3.3. Control Technique
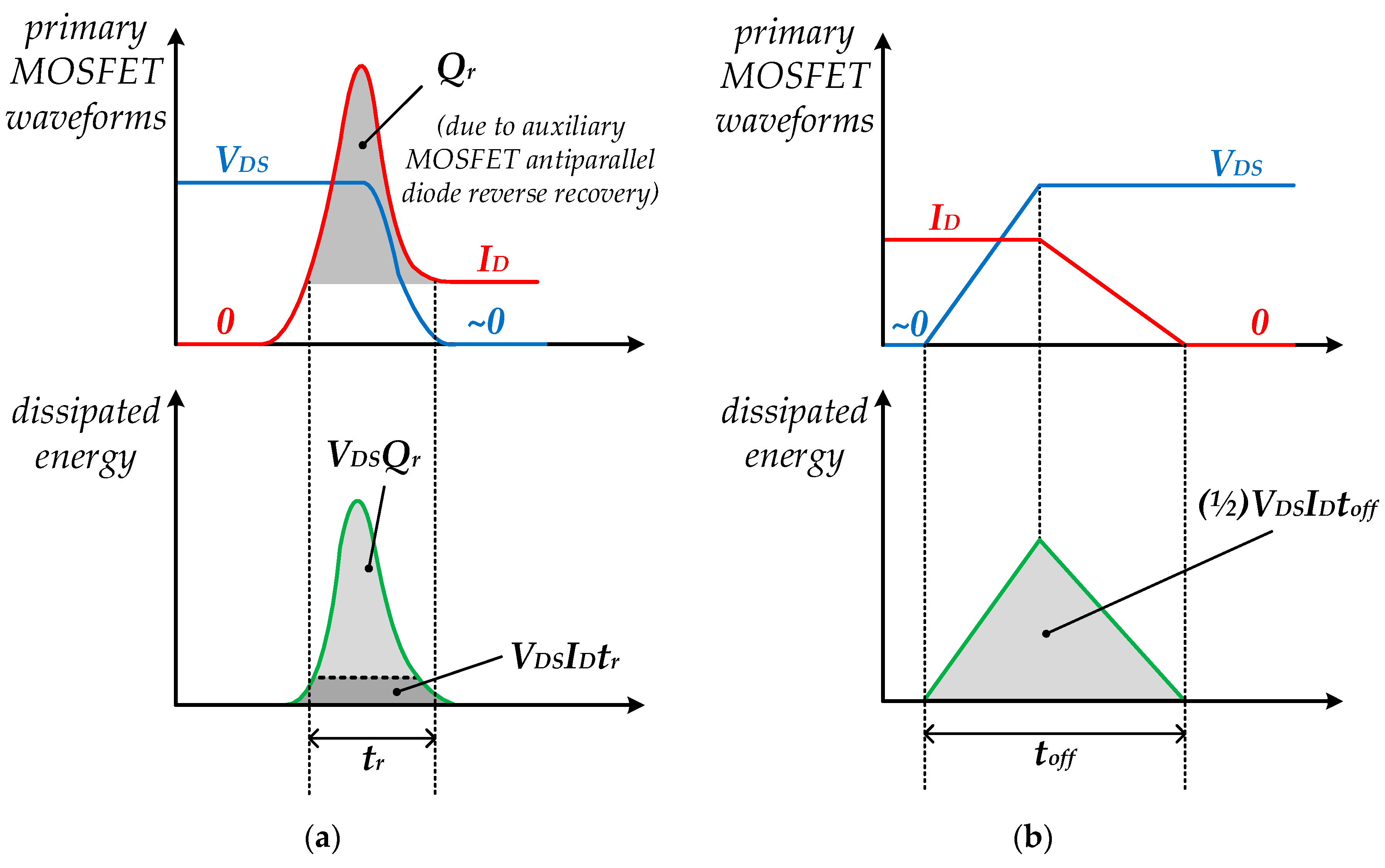
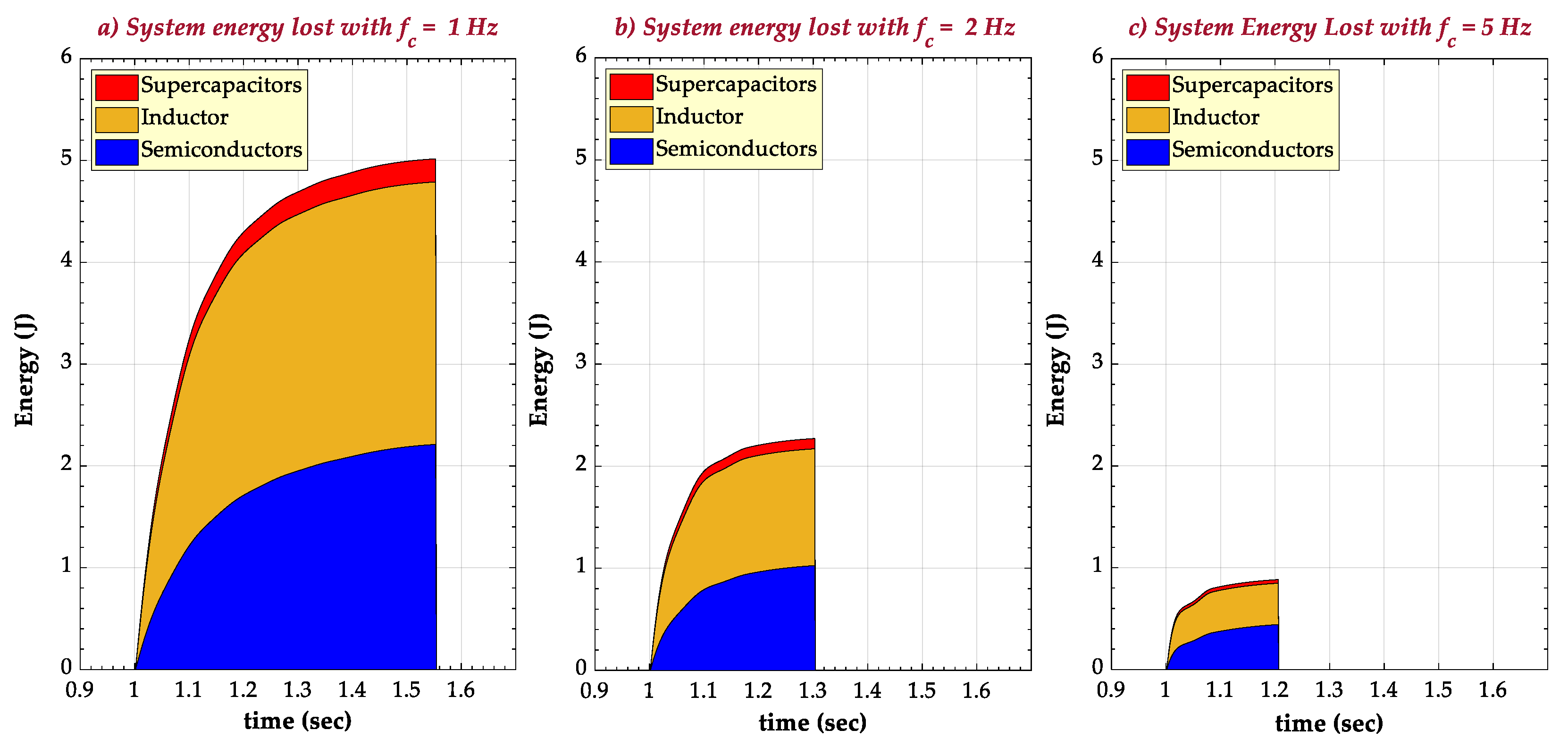
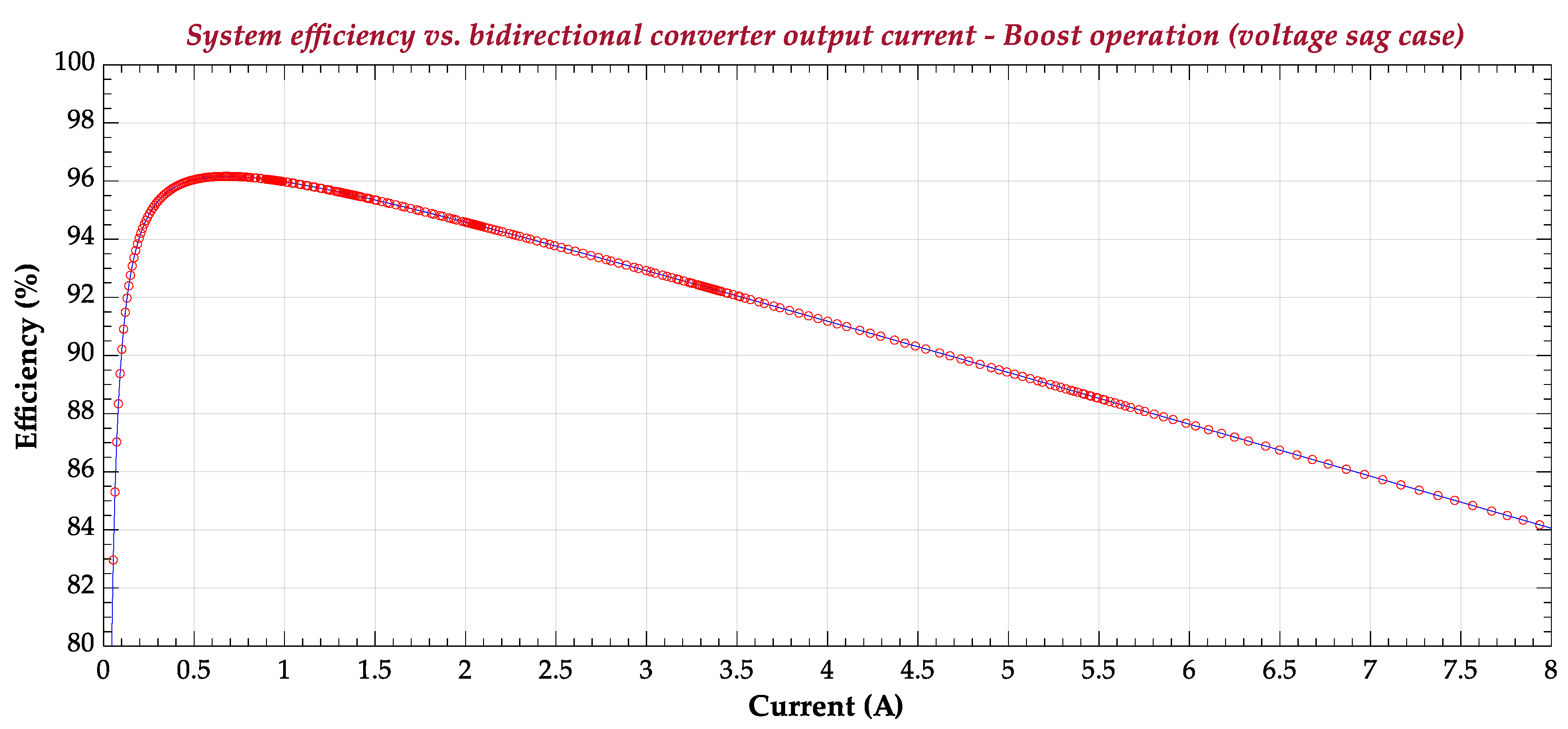
3.4. Power Losses Analysis
3.5. Proposed System Design
4. Simulation and Experimental Verification
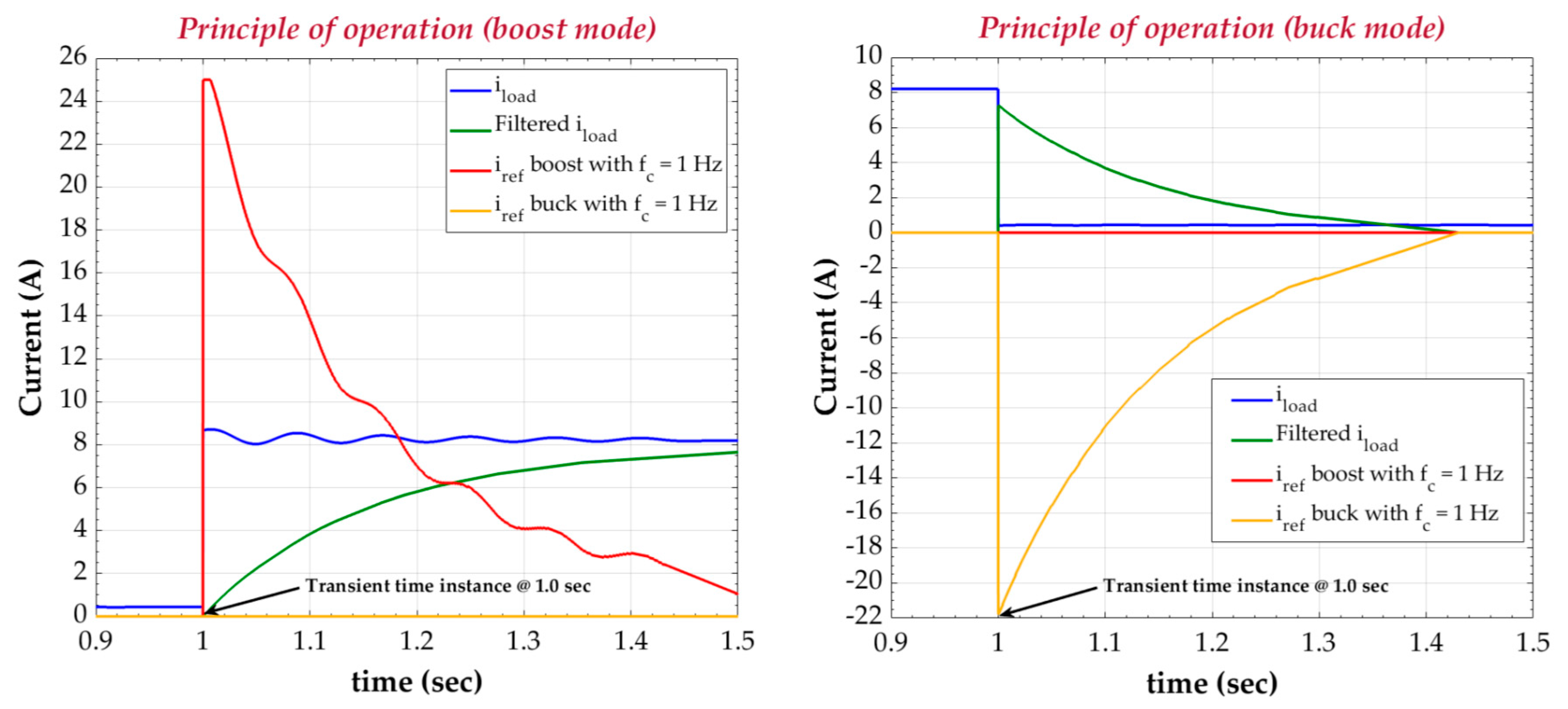
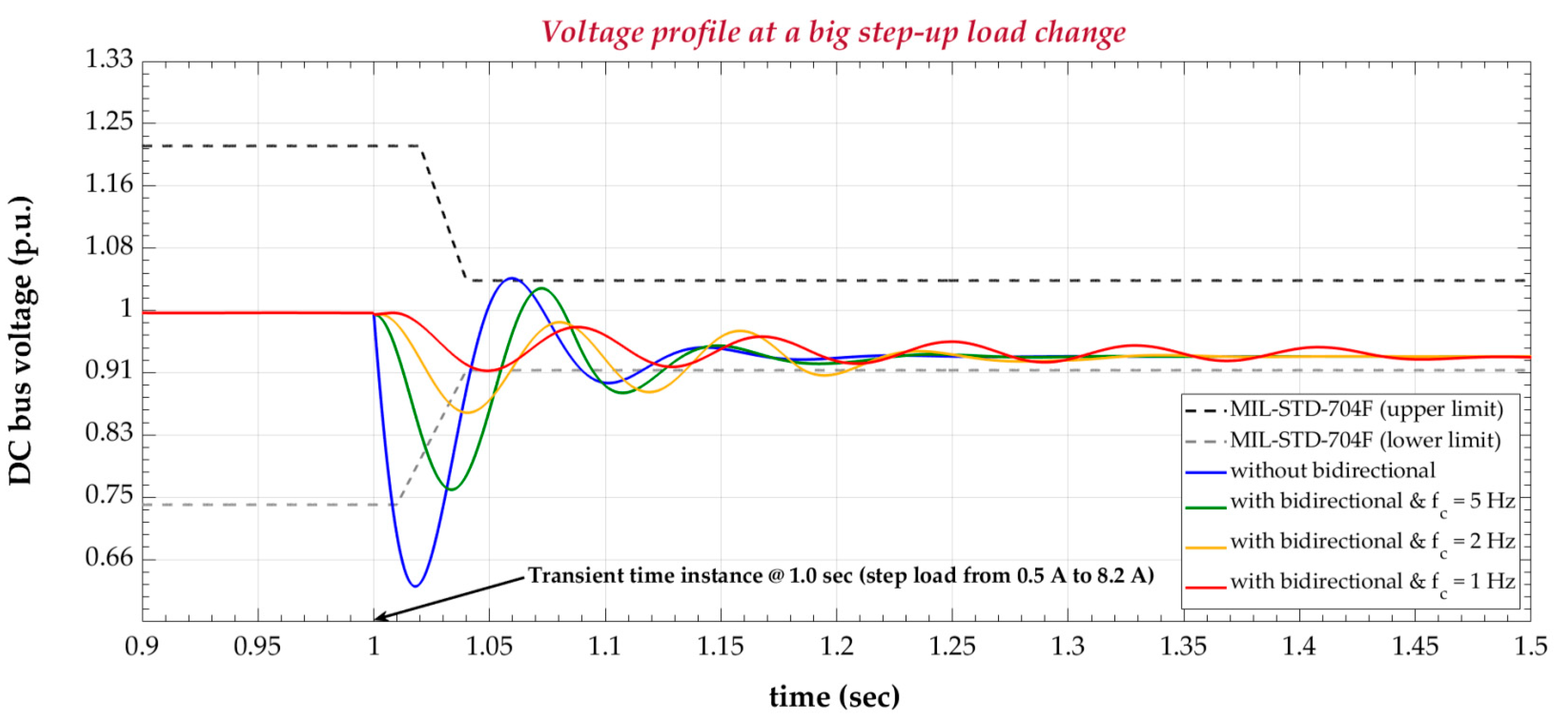
4.1. Simulation Results
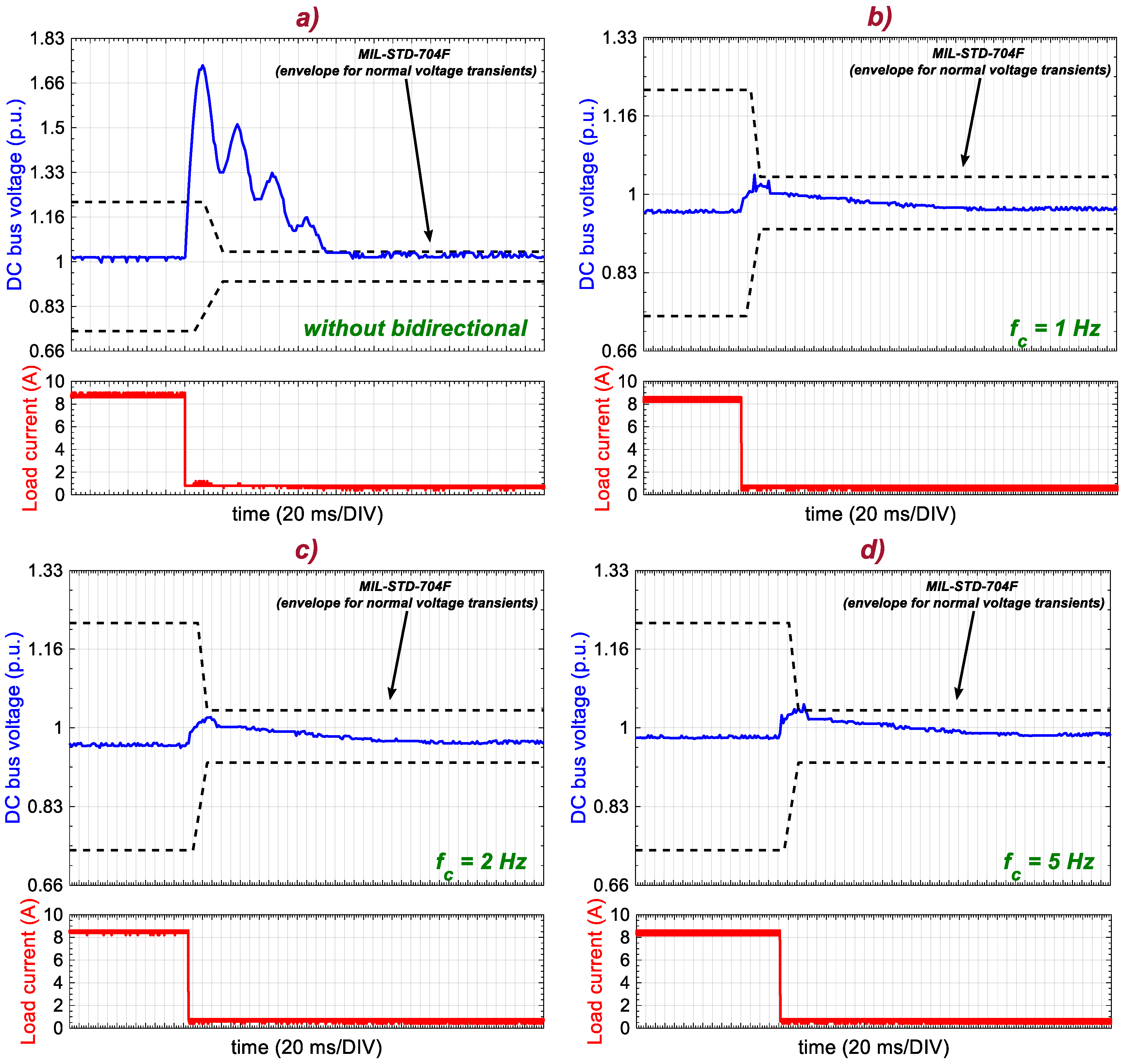
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviations | |
| AC | Alternating Current |
| APU | Auxiliary Power Unit |
| ATRU | Auto-Transformer Rectifier Unit |
| BBBC | Bidirectional Buck-Boost Converter |
| CCM | Continuous Conduction Mode |
| DC | Direct Current |
| DCM | Discontinuous Conduction Mode |
| ESR | Equivalent Series Resistance |
| HVDC | High Voltage Direct Current |
| M/A-EA | More/All Electric Aircraft |
| MEA | More Electric Aircraft |
| MOSFET | Metal Oxide Semiconductor Field Effect Transistor |
| PCC | Peak Current Control |
| PWM | Pulse Width Modulation |
| RMS | Root Mean Square |
| SiC | Silicon Carbide |
| SSPC | Solid State Power Controller |
| TRU | Transformer Rectifier Unit |
| Symbols | |
| Cb | DC bus capacitance |
| CHV | Bidirectional converter high voltage side capacitance |
| CSC | Supercapacitor bank capacitance |
| d | Bidirectional converter duty ratio |
| Eoff | Energy dissipated during turn-off transition |
| Eon | Energy dissipated during turn-on transition |
| fs | Bidirectional converter switching frequency |
| ibus | DC bus current (supplied to load) |
| ic | Control signal (peak current reference) |
| iconv | Bidirectional converter current (source/sink to/from the DC bus) |
| ID | Average value of the MOSFET drain current |
| ID,rms | RMS value of the MOSFET drain current |
| IHIGH | Average value of the bidirectional converter high voltage side current |
| IL | Average value of the inductor current |
| IL,max | Maximum value of the inductor current |
| IL,min | Minimum value of the inductor current |
| IL,rms | RMS value of the inductor current |
| iload | Load current |
| ILOW | Average value of the bidirectional converter low voltage side current |
| k | Current reference multiplication factor (bidirectional converter gain) |
| L | Bidirectional converter inductance |
| Lb | DC bus inductance |
| m1 | Rising slope of the inductor current |
| mc | Compensation ramp slope |
| Pcond | MOSFET conduction power losses |
| PHIGH | Average power at the bidirectional converter high voltage side |
| Pind | Inductor conduction power losses |
| Plosses | Total system power losses |
| PLOW | Average power at the bidirectional converter low voltage side |
| Pscaps | Supercapacitor bank conduction power losses |
| Psemi | MOSFET power losses |
| Psw | MOSFET switching power losses |
| Pturn-off | Switching power losses during turn-off transition |
| Pturn-on | Switching power losses during turn-on transition |
| Qr | Recovered stored charge of the antiparallel diode |
| Rb | DC bus resistance |
| RDS(on) | MOSFET drain-source on-resistance |
| RL | Resistance of the bidirectional converter inductor |
| RLoad | Load resistance |
| Rscaps | Supercapacitor bank resistance |
| Shigh | Upper bidirectional converter MOSFET (controlled in buck mode) |
| Slow | Lower bidirectional converter MOSFET (controlled in boost mode) |
| toff | Turn-off transition time interval |
| tr | Turn-on transition time interval |
| Ts | Bidirectional converter switching period |
| Vb | DC bus voltage |
| VDS | MOSFET drain-source voltage |
| VHIGH | Average voltage at the bidirectional converter high voltage side |
| VLOW | Average voltage at the bidirectional converter low voltage side |
| Vsc | Supercapacitors voltage |
| Vsc(max) | Supercapacitors maximum voltage |
| ΔIL | Inductor current disturbance |
| ΔIL,0 | Initial (first cycle) small disturbance in the inductor current |
| ΔIL,1 | Small disturbance in the inductor current at the second switching cycle |
| ΔIL,2 | Small disturbance in the inductor current at the third switching cycle |
| ΔVon | Voltage drop of the MOSFET antiparallel diode during its conduction |
Appendix A

References
- Bozhko, S.; Hill, C.I.; Yang, T. More-Electric Aircraft: Systems and Modeling. Wiley Encycl. Electr. Electron. Eng. 2018, 1–31. [Google Scholar] [CrossRef]
- Madonna, V.; Migliazza, P.; Giangrande, P.; Lorenzani, E.; Buticchi, G.; Galea, M. The Rebirth of the Current Source Inverter: Advantages for Aerospace Motor Design. IEEE Ind. Electron. Mag. 2019, 13, 65–76. [Google Scholar] [CrossRef]
- European Commission. Flightpath 2050. Europe’s Vision for Aviation. 2011. Available online: https://ec.europa.eu/transport/sites/transport/files/modes/air/doc/flightpath2050.pdf (accessed on 7 August 2020).
- Buticchi, G.; Costa, L.; Lissere, M. Improving System Efficiency for the More Electric Aircraft: A Look at dc/dc Converters for the Avionic Onboard dc Microgrid. IEEE Ind. Electron. Mag. 2017, 11, 26–36. [Google Scholar] [CrossRef]
- Buticchi, G.; Costa, L.F.; Barater, D.; Lissere, M.; Amarillo, E.D. A Quadruple Active Bridge Converter for the Storage Integration on the More Electric Aircraft. IEEE Trans. Power Electron. 2018, 33, 8174–8186. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Song, Q.; Yin, S.; Chen, J. On the Decentralized Energy Management Strategy for the All-Electric APU of Future More Electric Aircraft Composed of Multiple Fuel Cells and Supercapacitors. IEEE Trans. Ind. Electron. 2020, 67, 6183–6194. [Google Scholar] [CrossRef]
- Todd, R.; Forsyth, A.J. DC-bus power quality for aircraft power systems during generator fault conditions. IET Electr. Syst. Transp. 2011, 1, 126–135. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Wang, C.; Chen, J. Investigation on the Selection of Electric Power System Architecture for Future More Electric Aircraft. IEEE Trans. Transp. Electr. 2018, 4, 563–576. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T. More Electric Aircraft: Review, Challenges, and Opportunities for Commercial Transport Aircraft. IEEE Trans. Transp. Electr. 2015, 1, 54–64. [Google Scholar] [CrossRef]
- The Air Transport System and Clean Sky. The Hub of Europe’s Aeronautical R&T. 2004. Available online: https://www.cleansky.eu/aviation-0 (accessed on 7 August 2020).
- Yang, T.; Bozhko, S.; Asher, G. Application of Dynamic Phasor Concept in Modeling Aircraft Electrical Power Systems. SAE Int. J. Aerosp. 2013, 6, 38–48. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M.; Skrlec, D. Advanced LVDC Electrical Power Architectures and Microgrids: A step toward a new generation of power distribution networks. IEEE Electrif. Mag. 2014, 2, 54–65. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, A.T.; Mohamed, A.A.; Mohammed, O.A. DC Microgrids and distribution systems: An overview. Electric. Power Syst. Res. 2015, 119, 407–417. [Google Scholar] [CrossRef]
- Baros, D.; Voglitsis, D.; Papanikolaou, N.; Kyritsis, A.; Rigogiannis, N. Wireless Power Transfer for Distributed Energy Sources Exploitation in DC Microgrids. IEEE Trans. Sustain. Energy 2019, 10, 2039–2049. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Yang, T.; Gao, F.; Bozhko, S.; Wheeler, P. Power Electronic Systems for Aircraft. In Control of Power Electronic Converters and Systems Vol. 2, 1st ed.; Blaabjerg, F., Ed.; Academic Press: Cambridge, MA, USA, 2018; pp. 333–368. [Google Scholar] [CrossRef]
- Department of Defense Interface Standard, MIL-STD-704F, Aircraft Electric Power Characteristics, March 2004. Available online: http://everyspec.com/MIL-STD/MIL-STD-0700-0799/MIL-STD-704F_1083/ (accessed on 7 August 2020).
- Karatzaferis, I.; Tatakis, E.; Papanikolaou, N. Analysis and design of a universal energy recovery converter for use with industrial inverters. In Proceedings of the 9th International Conference on Compatibility and Power Electronics (CPE 2015), Costa da Caparica, Portugal, 24–26 June 2015. [Google Scholar] [CrossRef]
- Kyritsis, A.; Papanikolaou, N.; Tatakis, E. Enhanced current pulsation smoothing parallel active filter for single stage grid-connected AC-PV modules. In Proceedings of the 13th International Power Electronics and Motion Control Conference (EPE 2008), Poznan, Poland, 1–3 September 2008. [Google Scholar] [CrossRef]
- Karatzaferis, I.; Tatakis, E.; Papanikolaou, N. Investigation of energy savings on industrial motor drives using bidirectional converters. IEEE Access 2017, 5, 17952–17961. [Google Scholar] [CrossRef]
- Rigogiannis, N.; Voglitis, D.; Papanikolaou, N. Microcontroller Based Implementation of Peak Current Control Method in a Bidirectional Buck-Boost DC-DC Converter. In Proceedings of the 20th International Symposium on Electrical Apparatus and Technologies (SIELA 2018), Bourgas, Bulgaria, 3–6 June 2018. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics, 3rd ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Ridley, R.B. A New, Continuous-Time Model for Current-Mode Control. IEEE Trans. Power Electron. 1991, 6, 271–280. [Google Scholar] [CrossRef]
- Hallworth, M.; Shirsavar, S.A. Microcontroller-Based Peak Current Mode Control Using Digital Slope Compensation. IEEE Trans. Power Electron. 2012, 3340–3351. [Google Scholar] [CrossRef]
- Rigogiannis, N.; Baros, D.; Lempesis, E.; Ntoga, S.; Peioglou, E.; Pechlivanis, C.; Papanikolaou, N. Experimental Investigation of a Digitally Current Controlled Synchronous Buck DC/DC Converter for Microgrids Applications. In Proceedings of the 2019 Panhellenic Conference on Electronics & Telecommunications (PACET), Volos, Greece, 8–9 November 2019. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications and Design, 3rd ed.; Wiley: Hoboken, NJ, USA, 2002. [Google Scholar]
- ON Semiconductor. Datasheet: NVHL160N120SC1. Silicon Carbide N-Channel MOSFET. Available online: https://www.onsemi.com/pub/Collateral/NVHL160N120SC1-D.pdf (accessed on 7 August 2020).
- ON Semiconductor. Datasheet: FAN7390. High & Low Side Gate-Driver. Available online: https://www.onsemi.com/pub/Collateral/FAN7390-D.pdf (accessed on 7 August 2020).
- ON Semiconductor. Datasheet: RHRD660S. Hyperfast Diode. Available online: https://www.onsemi.com/pub/Collateral/RHRD660S-D.pdf (accessed on 7 August 2020).
- ON Semiconductor. Datasheet: 6N137M. Logic Gate Optocoupler. Available online: https://www.onsemi.com/pub/Collateral/HCPL2631M-D.pdf (accessed on 7 August 2020).
- Gao, F.; Bozhko, S.; Costabeber, A.; Asher, G.; Wheeler, P. Control Design and Voltage Stability Analysis of a Droop Controlled Electrical Power System for More Electric Aircraft. IEEE Trans. Ind. Electron. 2017, 64, 9271–9281. [Google Scholar] [CrossRef]
- Zhang, H.; Mollet, F.; Saudemont, C.; Robyns, B. Experimental Validation of Energy Storage System Management Strategies for a Local DC Distribution System for More Electric Aircraft. IEEE Trans. Ind. Electron. 2010, 57, 3905–3916. [Google Scholar] [CrossRef]
- Trentin, A.; Zanchetta, P.; Wheeler, P.; Clare, J. Power Conversion for a Novel AC/DC Aircraft Electrical Distribution System. IET Electr. Syst. Transp. 2014, 4, 29–37. [Google Scholar] [CrossRef]
- Gao, F.; Bozhko, S.; Asher, G.; Wheeler, P.; Patel, C. An Improved Voltage Compensation Approach in a Droop-Controlled DC Power System for the More Electric Aircraft. IEEE Trans. Power Electron. 2016, 31, 7369–7383. [Google Scholar] [CrossRef]
- Gao, F.; Bozhko, S. Modeling and Impedance Analysis of a Single DC Bus-Based Multiple Source Multiple-Load Electrical Power System. IEEE Trans. Transp. Electrif. 2016, 2, 335–346. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol—Description | Value—(Manufacturer) |
|---|---|
| Bidirectional Converter | |
| fs (switching frequency) | 50 kHz |
| L (inductance) | 940 μH |
| RL (inductor parasitic resistance) | 540 mΩ |
| CHV (high-voltage side capacitance) | 600 μF (WÜRTH) |
| Converter switches (SiC power MOSFETs) | NVHL160N120SC1 (ON) [28] |
| Driving, Sensing and Control | |
| Bootstrap driver | FAN7390 (ON) [29] |
| Bootstrap capacitor | 10 μF (YAGEO) |
| Bootstrap diode | RHRD660S (ON) [30] |
| Optocouplers | 6N137M (ON) [31] |
| Current sensors | LTS-25 NP (LEM) |
| Supercapacitor Bank | |
| Csc (supercapacitors capacitance) | 12.92 F (MAXWELL) |
| Rscaps (supercapacitors ESR) | 52.8 mΩ |
| Vsc(max) (supercapacitors maximum voltage) | 64.8 V |
| DC Bus | |
| Vb (DC bus voltage) | 120 V |
| Lb (DC bus inductance) | 100 mH |
| Rb (DC bus resistance) | 900 mΩ |
| Cb (DC bus capacitance) | 1.1 mF (KEMET) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rigogiannis, N.; Voglitsis, D.; Jappe, T.; Papanikolaou, N. Voltage Transients Mitigation in the DC Distribution Network of More/All Electric Aircrafts. Energies 2020, 13, 4123. https://doi.org/10.3390/en13164123
Rigogiannis N, Voglitsis D, Jappe T, Papanikolaou N. Voltage Transients Mitigation in the DC Distribution Network of More/All Electric Aircrafts. Energies. 2020; 13(16):4123. https://doi.org/10.3390/en13164123
Chicago/Turabian StyleRigogiannis, Nick, Dionisis Voglitsis, Tiago Jappe, and Nick Papanikolaou. 2020. "Voltage Transients Mitigation in the DC Distribution Network of More/All Electric Aircrafts" Energies 13, no. 16: 4123. https://doi.org/10.3390/en13164123
APA StyleRigogiannis, N., Voglitsis, D., Jappe, T., & Papanikolaou, N. (2020). Voltage Transients Mitigation in the DC Distribution Network of More/All Electric Aircrafts. Energies, 13(16), 4123. https://doi.org/10.3390/en13164123