Real-Time Control Based on a CAN-Bus of Hybrid Electrical Systems †



Abstract
:1. Introduction
2. Hybrid Power Pack Structure
3. Regular Power Management
3.1. Problem Statement
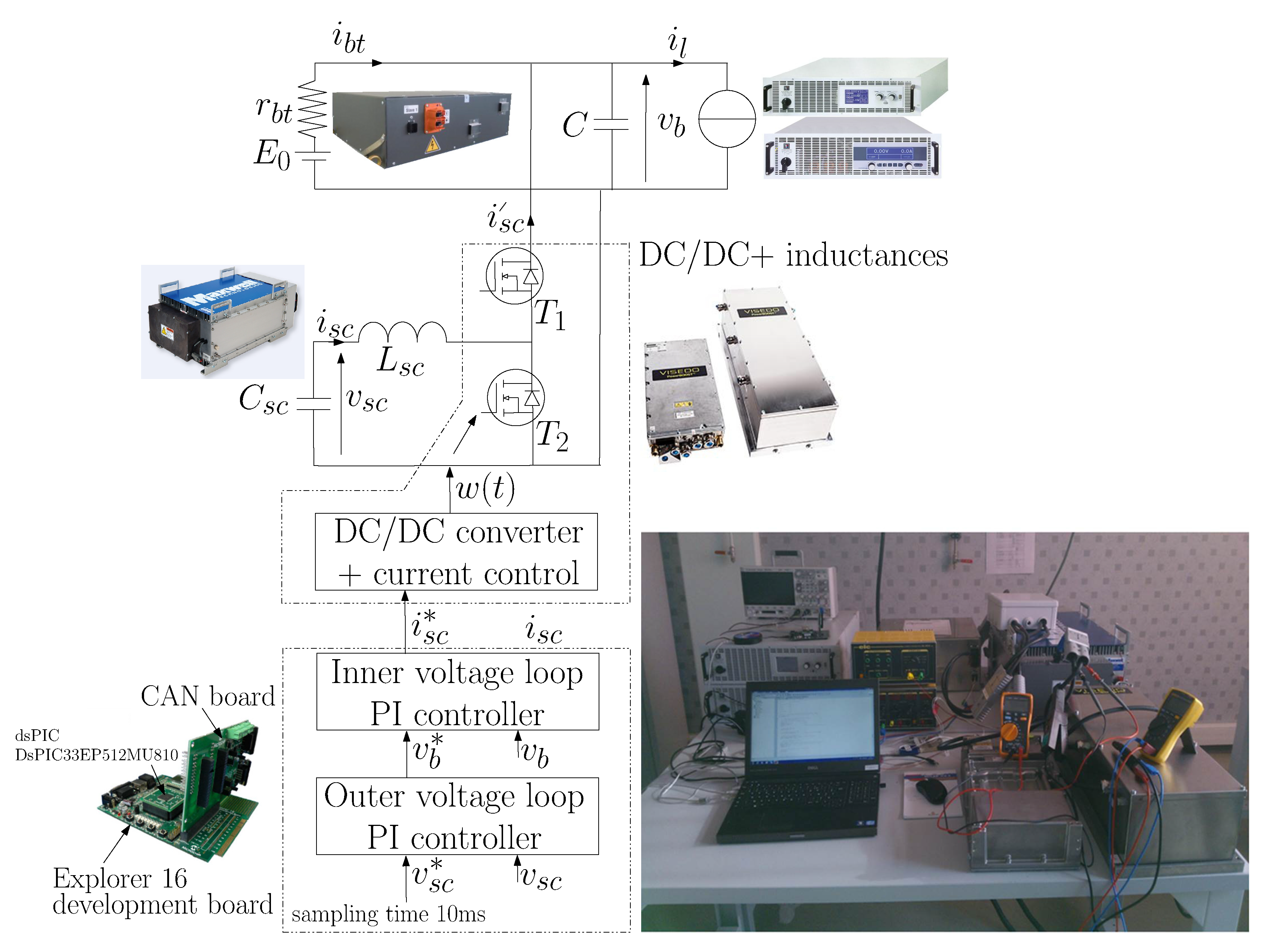
- The VISEDO PowerBOOST have its internal current controller and the DSP transmits the supercapacitors current reference through the CAN (Controller Area Network) bus to the DC/DC converter.
- A PI inner voltage loop controller computes the supercapacitors current reference to maintain the DC bus voltage at the desired value.
- A PI outer voltage controller adjusts the DC bus reference voltage to control the SoC of the SCs and implicitly control the dynamic of the battery current. It is important to mention here that the DC bus of a one-converter structure need to fluctuate in order to change the battery current in comparison with a two-converters structure where the DC bus voltage is constant.
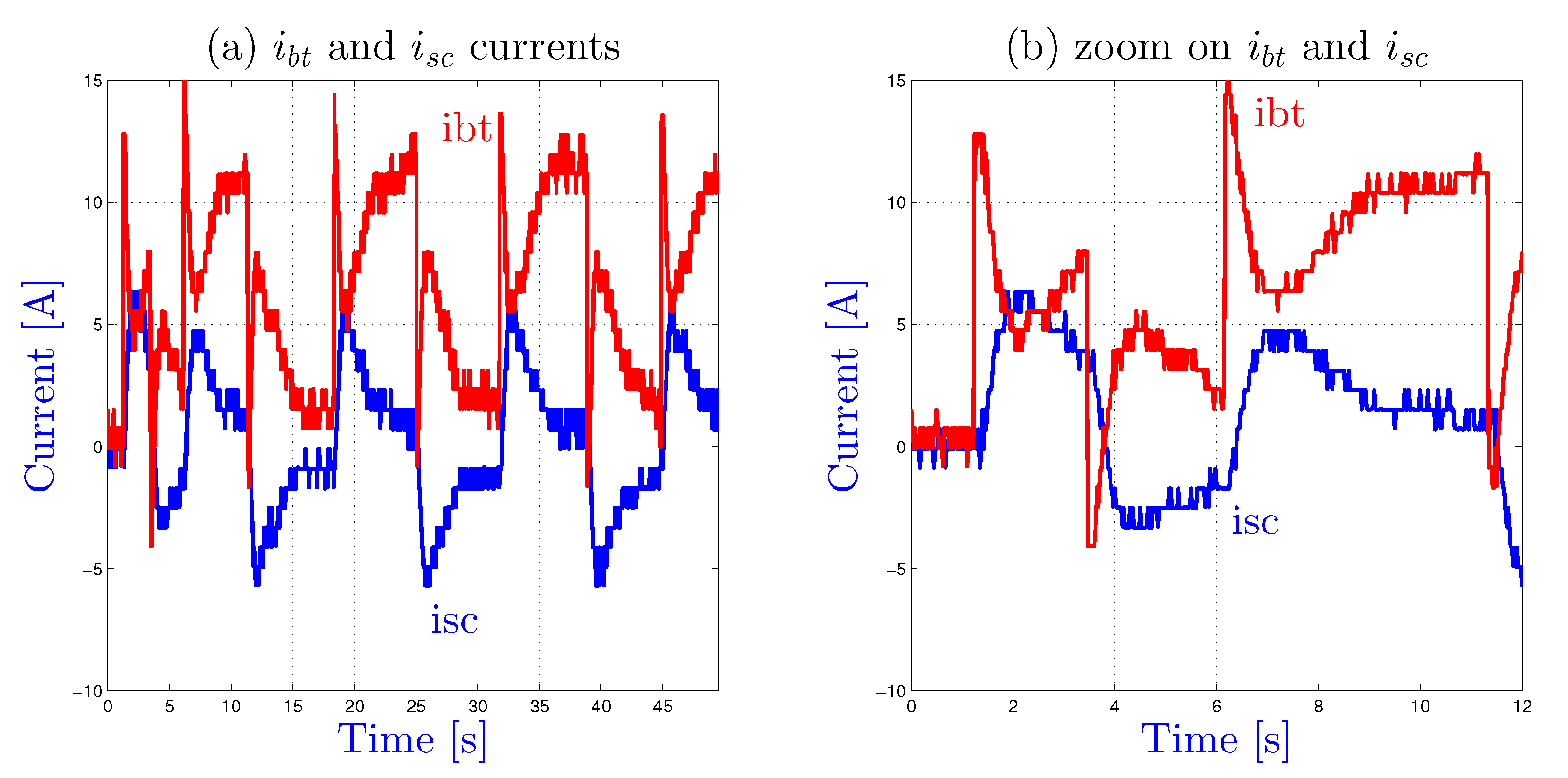
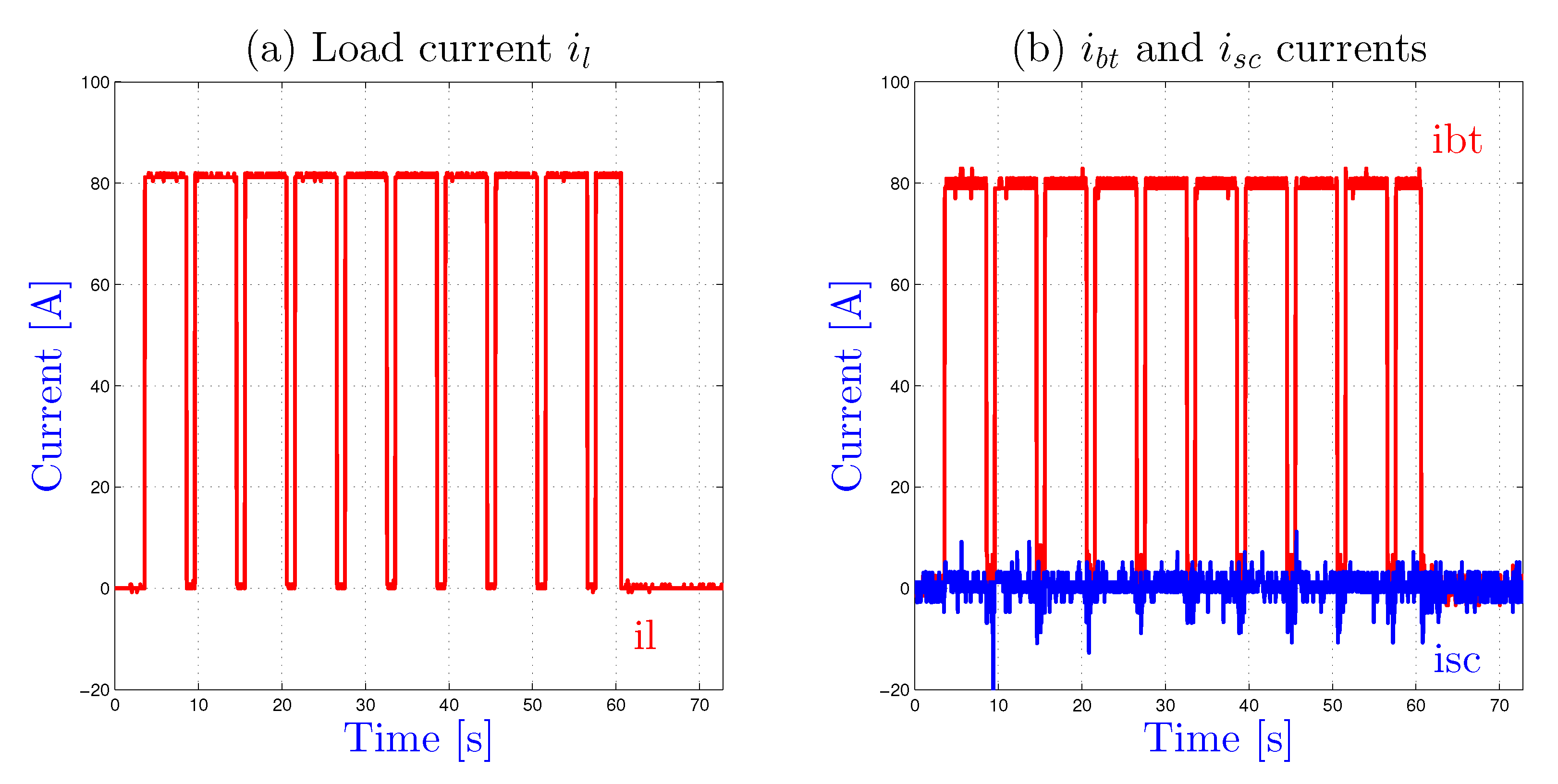
3.2. Experimental Results
3.3. Discussions
- Components software modifications: The most effective solution consists on a software update of the sampling time of the data send by all the components at around 1 to 5 ms if this option is allowed. This option lead to good performances of the hybrid system.
- Additional sensors: If the first solution is not feasible for top of the self-equipment, additional current and voltage sensors associated with local microcontrollers can be added. This option leads to a flexible solution for the designer but increase the cost and reduce the reliability due to additional materials.
- Additional converter: A two-converters structure is probably an effective solution is such configuration because it allows a separate control of the two current sources and therefore doesn’t lead to high battery peak current during load current transient. However, this solution increases the cost, weight, volume and decrease the efficiency and reliability.
4. Charge Depleting Mode with Soc Recovering of the Scs
4.1. Problem Statement
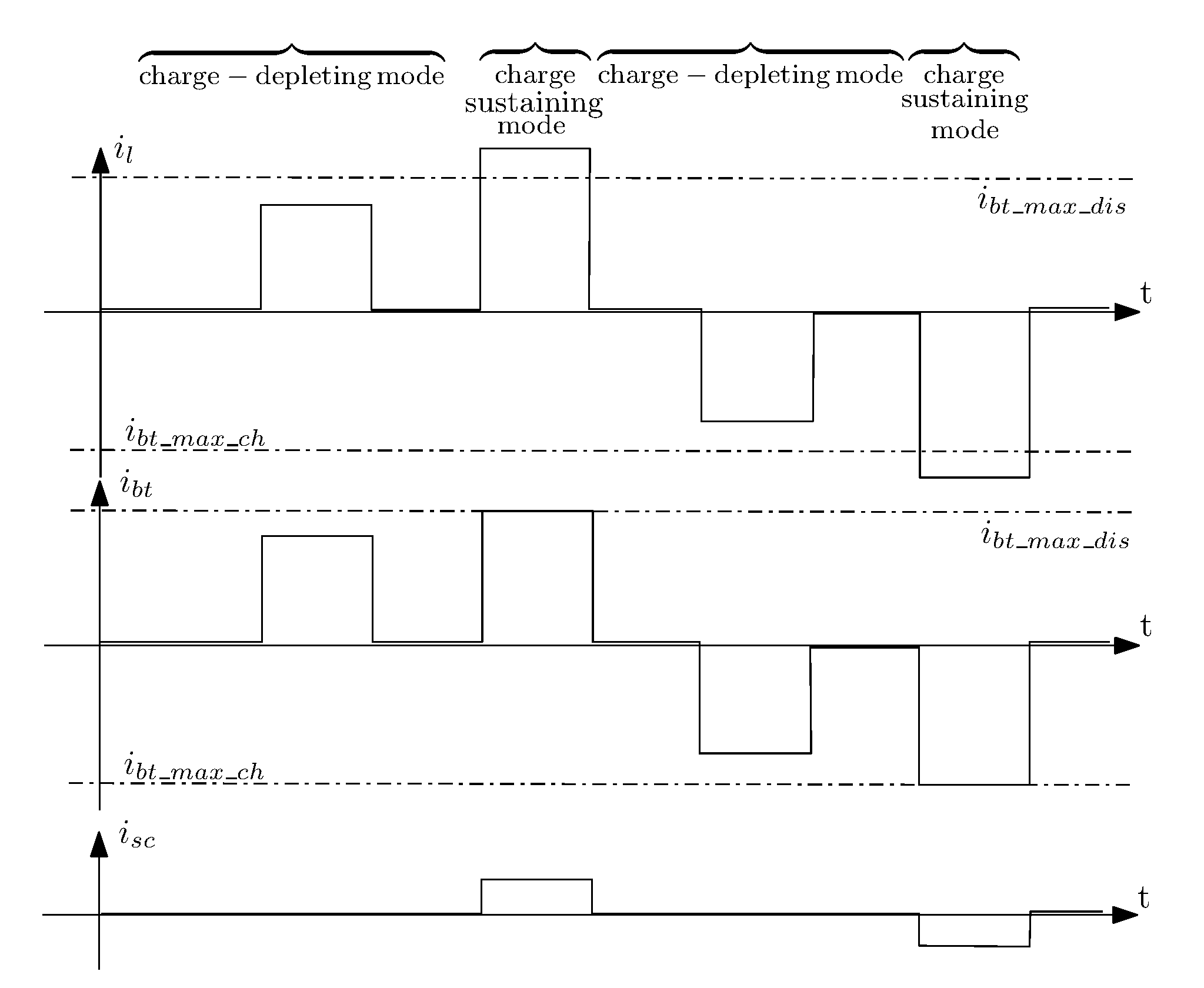
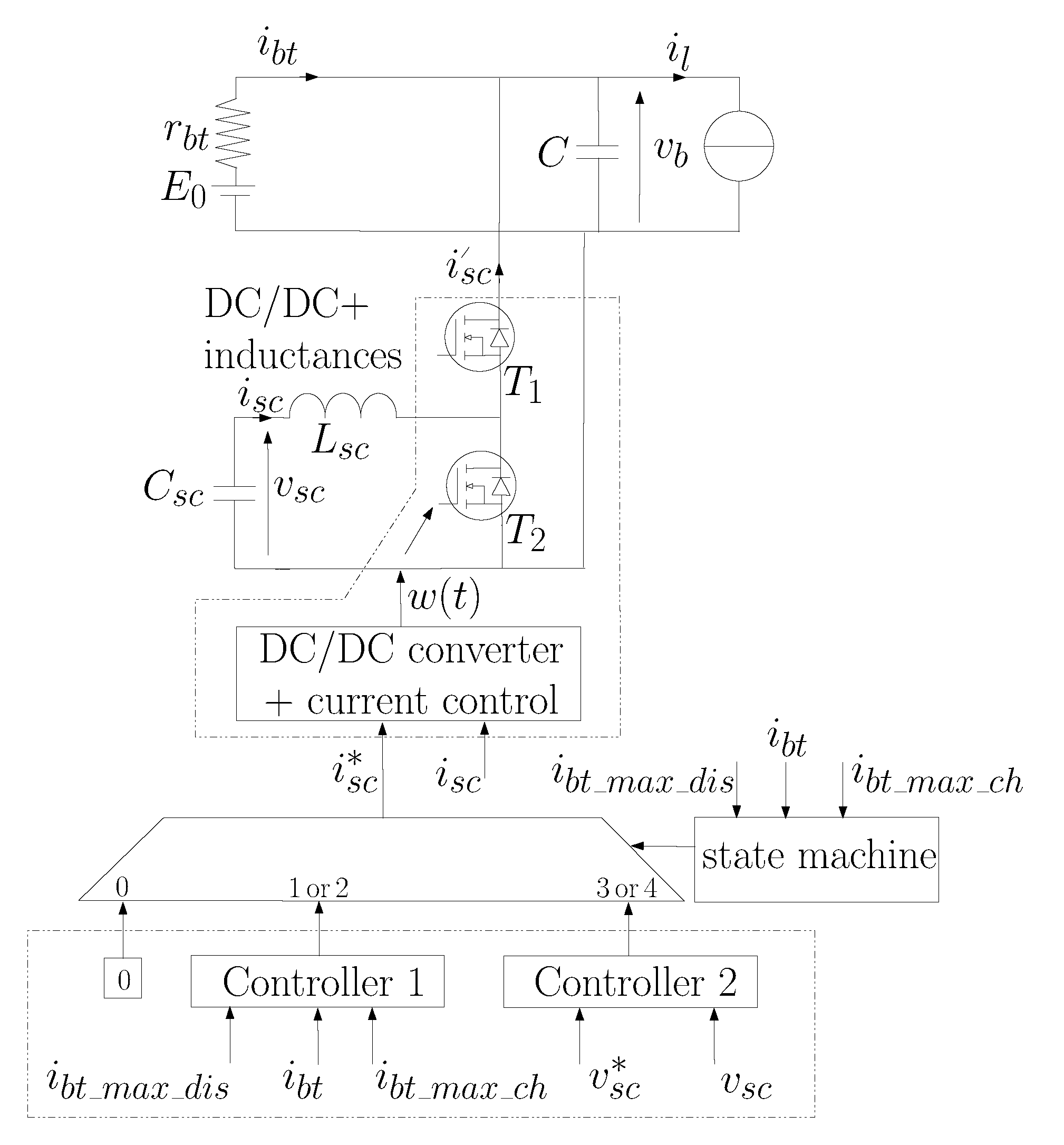
- Whenever the battery pack current remains within the allowable bounds (maximum battery current during discharge and charge ) the batteries satisfy the load power requirement and the SCs doesn’t give any assistance as shown in Figure 4. To recover the SoC of the SCs and thus the assistance, the controller maintains at a certain level the SoC when the current battery is in the allowed bounds.
- Controller 1 is activated when the battery current is higher than the threshold during a discharge operation or (in absolute value) during a charge operation.
- Controller 2 is activated when the battery current remains in the bounds , i.e., normal operation of the hybrid system.
4.2. Design of the Controller
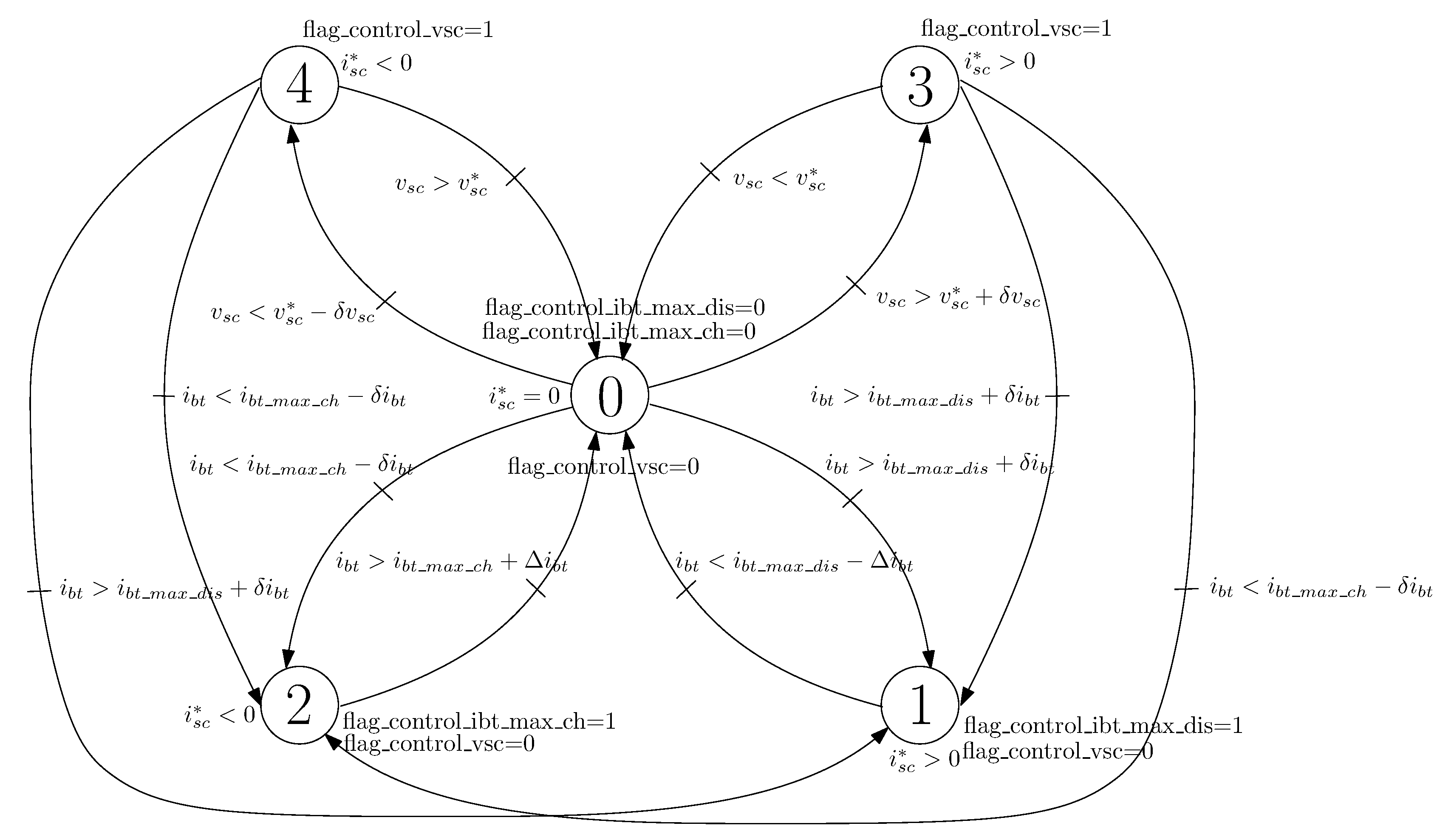
4.2.1. State Machine
- State 0: the battery current () doesn’t exceed the maximum value and the SCs voltage is also in the bounds , i.e., normal operation of the hybrid system. Therefore, the SCs is set equal to zero.
- State 1: the battery current () is higher than a user-defined threshold . Therefore, flag flag_control_ibt_max_dis is set to one and controller 1 is activated until the battery current is lower than .
- State 2: the battery current () is higher in absolute value than a user-defined threshold . Therefore, flag flag_control_ibt_max_ch is set to one and controller 1 is activated until the battery current is greater than .
- State 3: the battery current () doesn’t exceed the maximum value but the SCs voltage is too high. Therefore, flag flag_control_vsc is set to one and controller 2 is engaged, until the SCs voltage remains to the nominal value or the battery current () exceed the maximum values .
- State 4: the battery current () doesn’t exceed the maximum value but the SCs voltage is too low. Therefore, flag flag_control_vsc is set to one and controller 2 is engaged, until the SCs voltage remains to the nominal value or the battery current () exceed the maximum values .
4.2.2. Controller 1
- if flag_control_ibt_max_dis is set to one, S is set to
- if flag_control_ibt_max_ch is set to one, S is set to
4.2.3. Controller 2
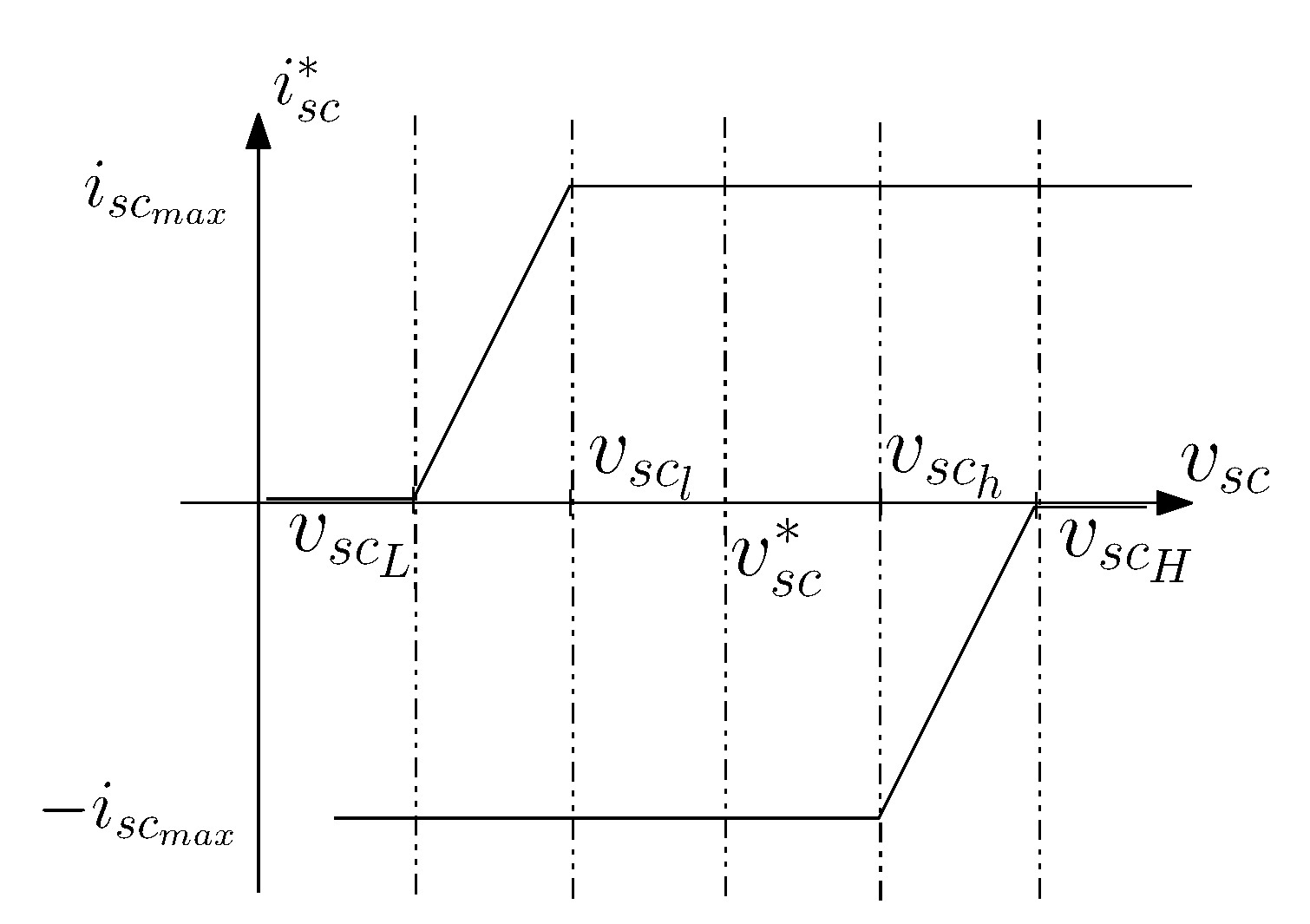
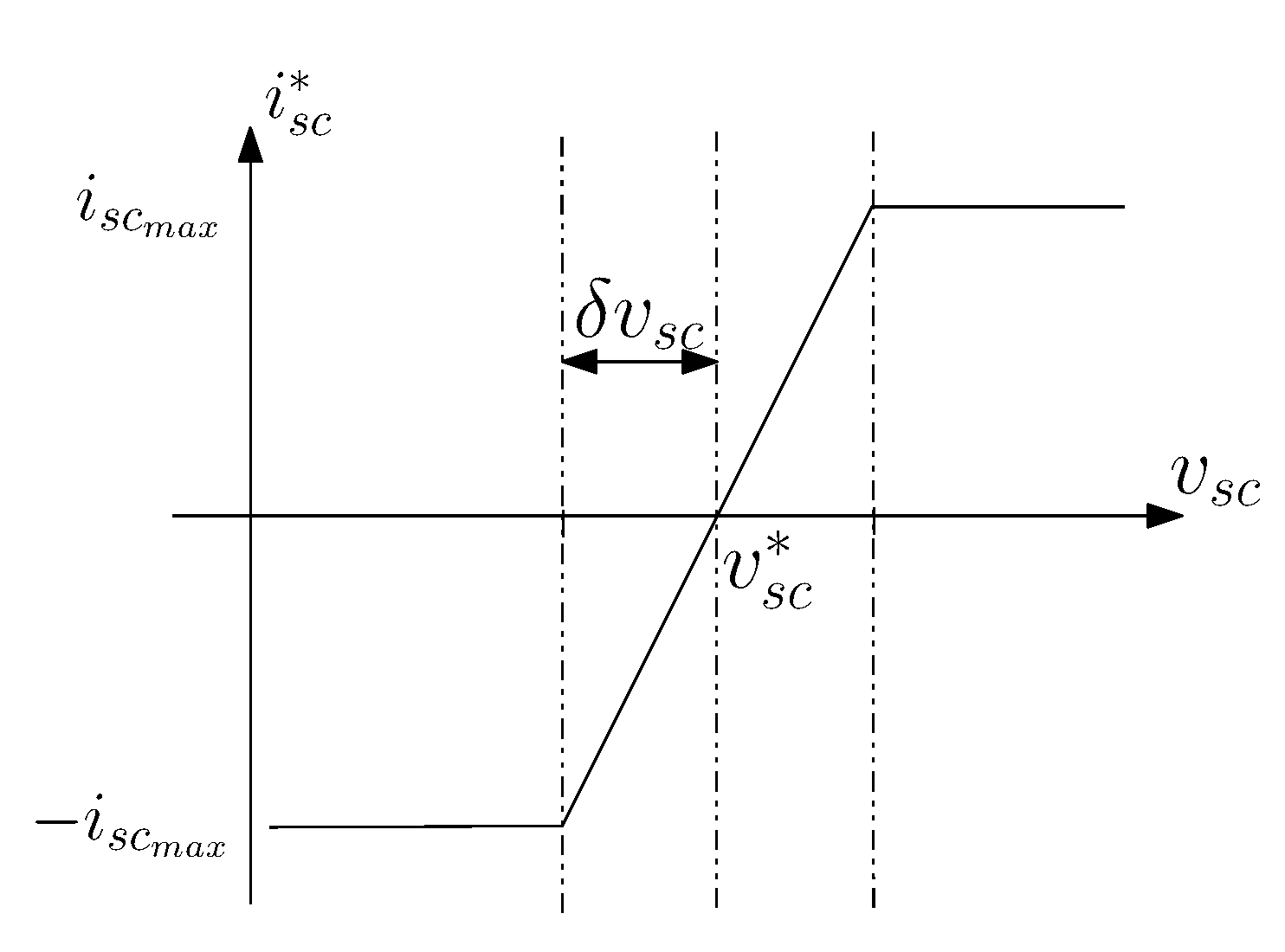
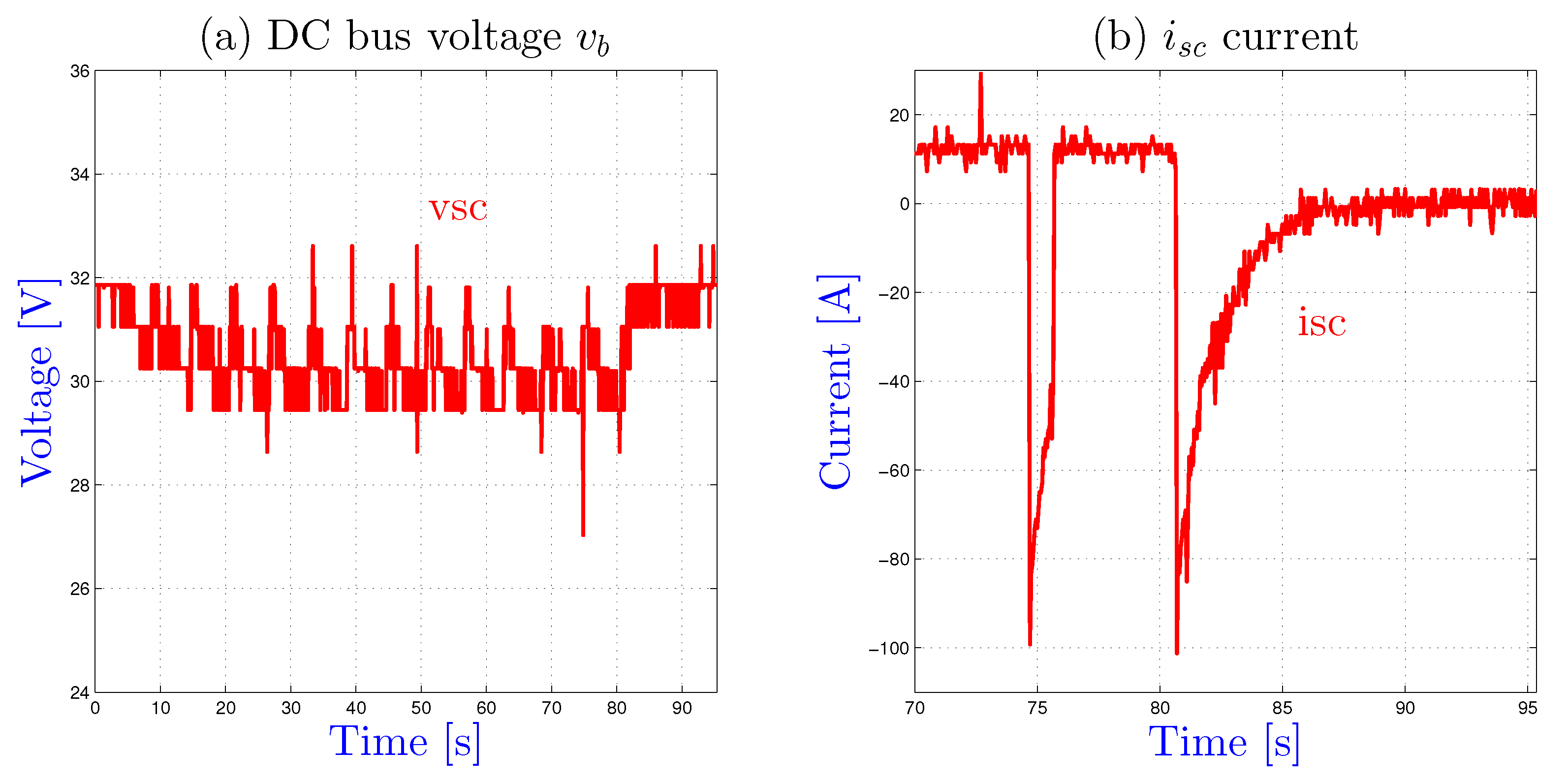
- Whenever , controller 2 computes a positive value of the SCs current as follows:so that the SCs is discharged at the maximum value as long as and later discharge the SCs by progressively reducing until reaching when . This behaviour is highlighted in the Figure 9.
- Whenever , controller 2 computes a negative value of the SCs current as follows:so that the SCs is charged at the maximum value as long as and later charge the SCs by progressively reducing until reaching when .
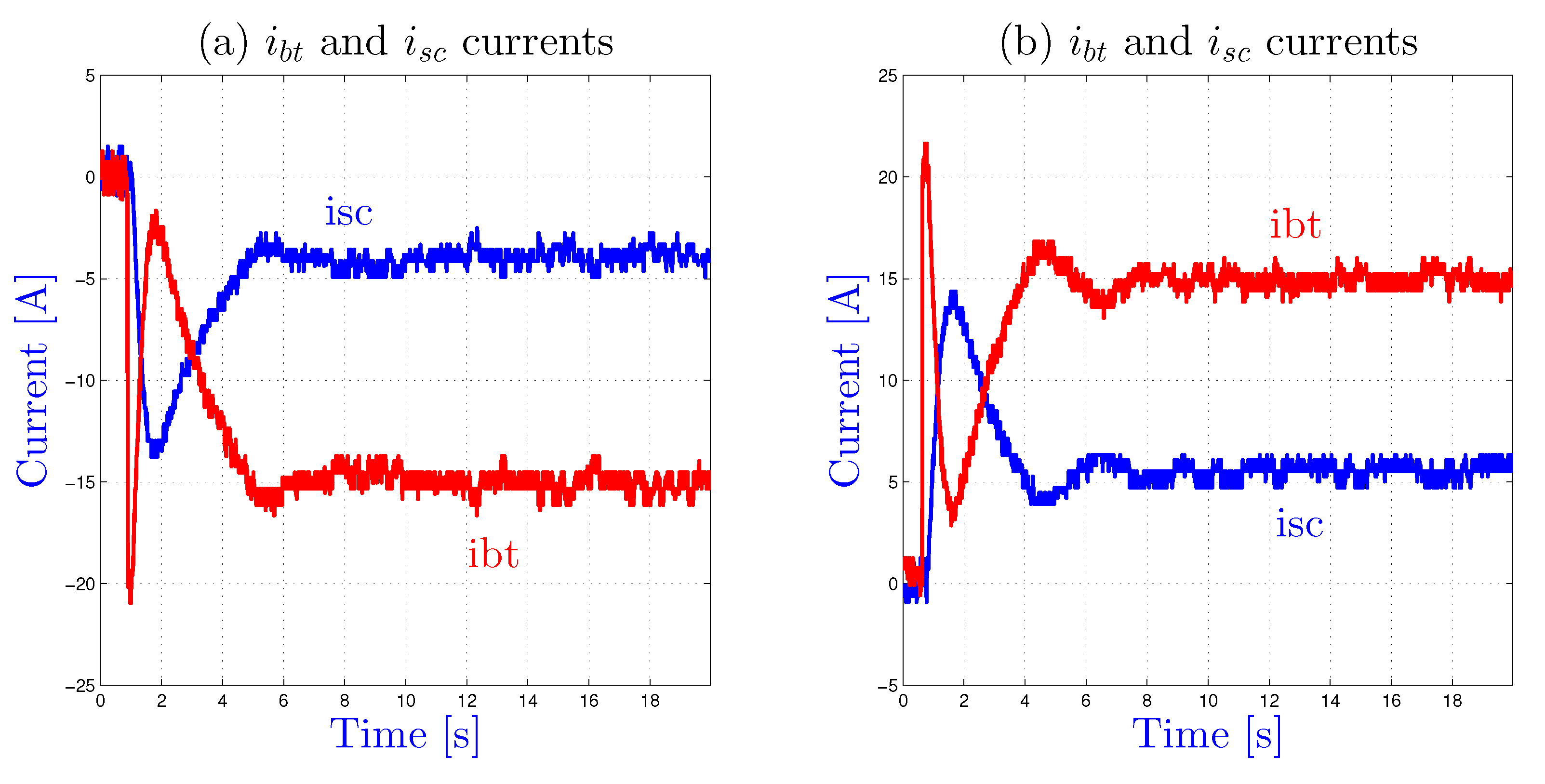
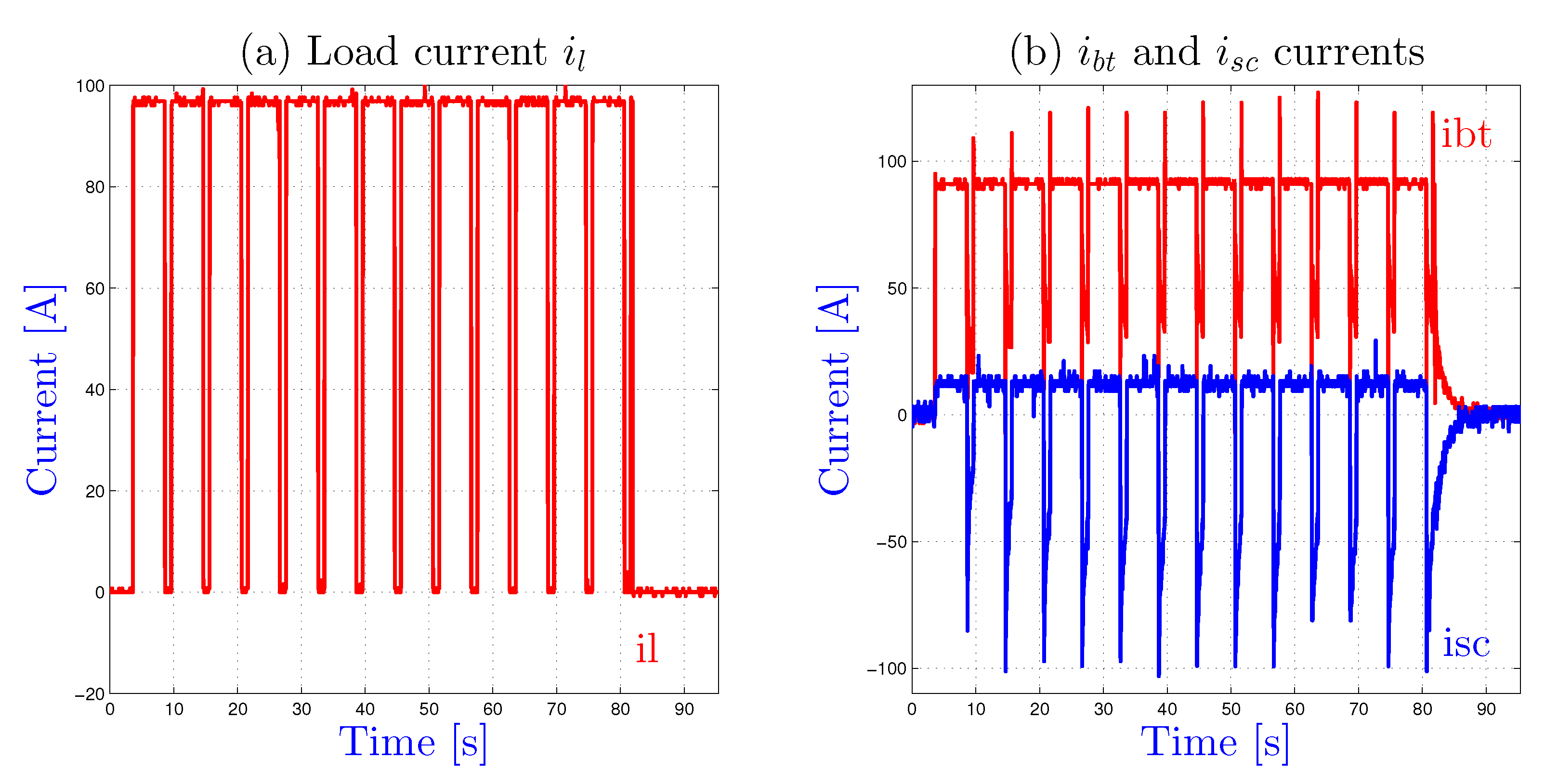
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cao, J.; Emadi, A. A new battery/ultracapacitor hybrid energy storage system for electric, hybrid, and plug-in hybrid electric vehicles. IEEE Trans. Power Electron. 2012, 27, 122–132. [Google Scholar] [CrossRef]
- Ostadi, A.; Kazerani, M.; Chen, S.K. Hybrid Energy Storage System (HESS) in vehicular applications: A review on interfacing battery and ultra-capacitor units. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo: Components, Systems, and Power Electronics—From Technology to Business and Public Policy, ITEC 2013, Detroit, MI, USA, 16–19 June 2013. [Google Scholar] [CrossRef]
- Hilairet, M.; Béthoux, O.; Ghanes, M.; Tanasa, V.; Barbot, J.P.; Normand-Cyrot, M.D. Experimental validation of a sampled-data passivity-based controller for coordination of converters in a fuel cell system. IEEE Trans. Ind. Electron. 2015, 62, 5187–5194. [Google Scholar] [CrossRef]
- Sun, L.; Feng, K.; Chapman, C.; Zhang, N. An adaptive power-split strategy for battery-supercapacitor powertrain-design, simulation, and experiment. IEEE Trans. Power Electron. 2017, 32, 9364–9375. [Google Scholar] [CrossRef]
- Castaings, A.; Lhomme, W.; Trigui, R.; Bouscayrol, A. Practical control schemes of a battery/supercapacitor system for electric vehicle. IET Electr. Syst. Transp. 2016, 6, 20–26. [Google Scholar] [CrossRef]
- Trovão, J.P.; Silva, M.A.; Dubois, M.R. Coupled energy management algorithm for MESS in urban EV. IET Electr. Syst. Transp. 2017, 7, 125–134. [Google Scholar] [CrossRef]
- Veneri, O.; Capasso, C.; Patalano, S. Experimental investigation into the effectiveness of a super-capacitor based hybrid energy storage system for urban commercial vehicles. Appl. Energy 2018, 227, 312–323. [Google Scholar] [CrossRef]
- Omran, K.C.; Mosallanejad, A. SMES/battery hybrid energy storage system based on bidirectional Z-source inverter for electric vehicles. IET Electr. Syst. Transp. 2018, 8, 215–220. [Google Scholar] [CrossRef]
- Soltani, M.; Ronsmans, J.; Kakihara, S.; Jaguemont, J.; Van den Bossche, P.; van Mierlo, J.; Omar, N. Hybrid battery/lithium-ion capacitor energy storage system for a pure electric bus for an urban transportation application. Appl. Sci. 2018, 8, 1176. [Google Scholar] [CrossRef] [Green Version]
- Deng, R.; Liu, Y.; Chen, W.; Liang, H. A Survey on Electric Buses—Energy Storage, Power Management, and Charging Scheduling. IEEE Trans. Intell. Transp. Syst. 2019, 1–14. [Google Scholar] [CrossRef]
- Khalid, M. A review on the selected applications of battery-supercapacitor hybrid energy storage systems for microgrids. Energies 2019, 12, 4559. [Google Scholar] [CrossRef] [Green Version]
- Odeim, F.; Roes, J.; Heinzel, A. Power management optimization of an experimental fuel cell/battery/supercapacitor hybrid system. Energies 2015, 8, 6302–6327. [Google Scholar] [CrossRef] [Green Version]
- Trovão, J.P.; Machado, F.; Pereirinha, P.G. Hybrid electric excursion ships power supply system based on a multiple energy storage system. IET Electr. Syst. Transp. 2016, 6, 190–201. [Google Scholar] [CrossRef]
- Bellache, K.; Camara, M.B.; Dakyo, B. Transient power control for diesel-generator assistance in electric boat applications using supercapacitors and batteries. IEEE J. Emerg. Select. Top. Power Electron. 2018, 6, 416–428. [Google Scholar] [CrossRef]
- Sandoval, C.; Alvarado, V.M.; Carmona, J.C.; Lopez Lopez, G.; Gomez-Aguilar, J.F. Energy management control strategy to improve the FC/SC dynamic behavior on hybrid electric vehicles: A frequency based distribution. Renew. Energy 2017, 105, 407–418. [Google Scholar] [CrossRef]
- Aharon, I.; Shmilovitz, D.; Kuperman, A. Multimode power processing interface for fuel cell range extender in battery powered vehicle. Appl. Energy 2017, 204, 572–581. [Google Scholar] [CrossRef]
- Mane, S.; Mejari, M.; Kazi, F.; Singh, N. Improving Lifetime of Fuel Cell in Hybrid Energy Management System by Lure-Lyapunov-Based Control Formulation. IEEE Trans. Ind. Electron. 2017, 64, 6671–6679. [Google Scholar] [CrossRef]
- Akar, F.; Tavlasoglu, Y.; Vural, B. An Energy Management Strategy for a Concept Battery/Ultracapacitor Electric Vehicle with Improved Battery Life. IEEE Trans. Transp. Electrif. 2017, 3, 191–200. [Google Scholar] [CrossRef]
- Lopez Lopez, G.; Schacht Rodriguez, R.; Alvarado, V.M.; Gomez-Aguilar, J.F.; Mota, J.E.; Sandoval, C. Hybrid PEMFC-supercapacitor system: Modeling and energy management in energetic macroscopic representation. Appl. Energy 2017, 205, 1478–1494. [Google Scholar] [CrossRef]
- Veneri, O.; Capasso, C.; Patalano, S. Experimental study on the performance of a ZEBRA battery based propulsion system for urban commercial vehicles. Appl. Energy 2017, 185, 2005–2018. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, ultracapacitor, fuel cell, and hybrid energy storage systems for electric, hybrid electric, fuel cell, and plug-in hybrid electric vehicles: State of the art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Chung, S.; Trescases, O. Hybrid Energy Storage System with Active Power-Mix Control in a Dual-Chemistry Battery Pack for Light Electric Vehicles. IEEE Trans. Transp. Electrif. 2017, 3, 600–617. [Google Scholar] [CrossRef]
- Burke, A.; Zhao, H. Applications of Supercapacitors in Electric and Hybrid Vehicles Applications UCD-ITS-RR-15-09. In Proceedings of the 5th European Symposium on Supercapacitor and Hybrid Solutions, Brasov, Romania, 23–25 April 2015; pp. 1–20. [Google Scholar]
- Kohler, T.P.; Buecherl, D.; Herzog, H.G. Investigation of control strategies for hybrid energy storage systems in hybrid electric vehicles. In Proceedings of the 5th IEEE Vehicle Power and Propulsion Conference, VPPC’09, Dearborn, MI, USA, 7–10 September 2009; pp. 1687–1693. [Google Scholar] [CrossRef]
- Bello, L.L.; Mariani, R.; Mubeen, S.; Saponara, S. Recent Advances and Trends in On-Board Embedded and Networked Automotive Systems. IEEE Trans. Ind. Inform. 2019, 15, 1038–1051. [Google Scholar] [CrossRef]
- Li, W.; Zhu, W.; Zhu, X.; Guo, J. Two-time-scale braking controller design with sliding mode for electric vehicles over CAN. IEEE Access 2019, 7, 128086–128096. [Google Scholar] [CrossRef]
- Vdovic, H.; Babic, J.; Podobnik, V. Automotive software in connected and autonomous electric vehicles: A review. IEEE Access 2019, 7, 166365–166379. [Google Scholar] [CrossRef]
- Jiang, K.; Zhang, H.; Karimi, H.R.; Lin, J.; Song, L. Simultaneous input and state estimation for integrated motor-transmission systems in a controller area network environment via an adaptive unscented kalman filter. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1570–1579. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Xu, L.; Hua, J.; Li, X.; Li, J.; Ouyang, M. Distributed control system based on CAN bus for fuel cell/battery hybrid vehicle. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 183–188. [Google Scholar] [CrossRef]
- Li, X.; Li, M. An embedded CAN-BUS communication module for measurement and control system. In Proceedings of the 2010 International Conference on E-Product E-Service and E-Entertainment, ICEEE2010, Henan, China, 7–9 November 2010. [Google Scholar] [CrossRef]
- Li, R.; Wu, J.; Wang, H.; Li, G. Design method of CAN BUS network communication structure for electric vehicle. In Proceedings of the 2010 International Forum on Strategic Technology, IFOST 2010, Ulsan, Korea, 13–15 October 2010; pp. 326–329. [Google Scholar] [CrossRef]
- Fan, Z.; Zhang, W.; Zheng, H.; Gang, S. Distributed battery management system based on CAN field-bus. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer, MEC 2013, Shengyang, China, 20–22 December 2013; pp. 1921–1924. [Google Scholar] [CrossRef]
- Marcon Zago, G.; Pignaton De Freitas, E. A Quantitative Performance Study on CAN and CAN FD Vehicular Networks. IEEE Trans. Ind. Electron. 2018, 65, 4413–4422. [Google Scholar] [CrossRef]
- Tiefensee, F.; Monaco, S.; Normand-Cyrot, D. IDA-PBC under sampling for port-controlled hamiltonian systems. In Proceedings of the 2010 American Control Conference, ACC 2010, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1811–1816. [Google Scholar] [CrossRef]
- Monaco, S.; Normand-Cyrot, D.; Tiefensee, F. Sampled-data stabilization: A PBC approach. IEEE Trans. Autom. Control 2011, 56, 907–912. [Google Scholar] [CrossRef]
- Agbli, K.; Hilairet, M.; Bossard, O.; Gustin, F. Power Management Strategy of a Single Converter Hybrid Electrical System Based on Battery and Super Capacitors. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference, VPPC 2015, Montreal, QC, Canada, 19–22 October 2015. [Google Scholar] [CrossRef]
- Ma, S.; Jiang, M.; Tao, P.; Song, C.; Wu, J.; Wang, J.; Deng, T.; Shang, W. Temperature effect and thermal impact in lithium-ion batteries: A review. Prog. Nat. Sci. Mater. Int. 2018, 28, 653–666. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E4V Battery pack | |||
| 48 V | 3.84 kWh | ||
| 80 Ah | mass | 50 kg | |
| Super-capacitors | |||
| 125 V | 140 Wh | ||
| 63 F | mass | 61 kg | |
| Electric load | |||
| 80 V | 10.5 kW | ||
| 510 A | mass | 31 kg | |
| Power supply | |||
| 80 V | 10 kW | ||
| 340 A | mass | 20 kg | |
| DC-DC converter | |||
| DC bus voltage range | 0–800 V | 250 kW | |
| 300 | mass | 15 kg | |
| Switching frequency | 4–6 kHz | Operating temperature | −40…105 C |
| Data | Sampling [ms] | Precision | Data Type |
|---|---|---|---|
| 54.2 | ±0.05 V | 8 bits | |
| 109 | ±0.01 V | 8 bits | |
| 109 | ±0.1 A | 8 bits | |
| 10 | ±1A | 8 bits |
| Baud Rate [kps] | Data Frames on the CAN Bus | Minimum Sampling Time [Hz] | Maximum Sampling Time [Hz] |
|---|---|---|---|
| 250 | 10 | 0.5 | 10 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agbli, K.S.; Hilairet, M.; Gustin, F. Real-Time Control Based on a CAN-Bus of Hybrid Electrical Systems. Energies 2020, 13, 4502. https://doi.org/10.3390/en13174502
Agbli KS, Hilairet M, Gustin F. Real-Time Control Based on a CAN-Bus of Hybrid Electrical Systems. Energies. 2020; 13(17):4502. https://doi.org/10.3390/en13174502
Chicago/Turabian StyleAgbli, Kréhi Serge, Mickaël Hilairet, and Frédéric Gustin. 2020. "Real-Time Control Based on a CAN-Bus of Hybrid Electrical Systems" Energies 13, no. 17: 4502. https://doi.org/10.3390/en13174502
APA StyleAgbli, K. S., Hilairet, M., & Gustin, F. (2020). Real-Time Control Based on a CAN-Bus of Hybrid Electrical Systems. Energies, 13(17), 4502. https://doi.org/10.3390/en13174502