Reduction in the Fluctuating Load on Wind Turbines by Using a Combined Nacelle Acceleration Feedback and Lidar-Based Feedforward Control


Abstract
:1. Introduction
2. The Wind Turbine Model and Controllers Used in this Study
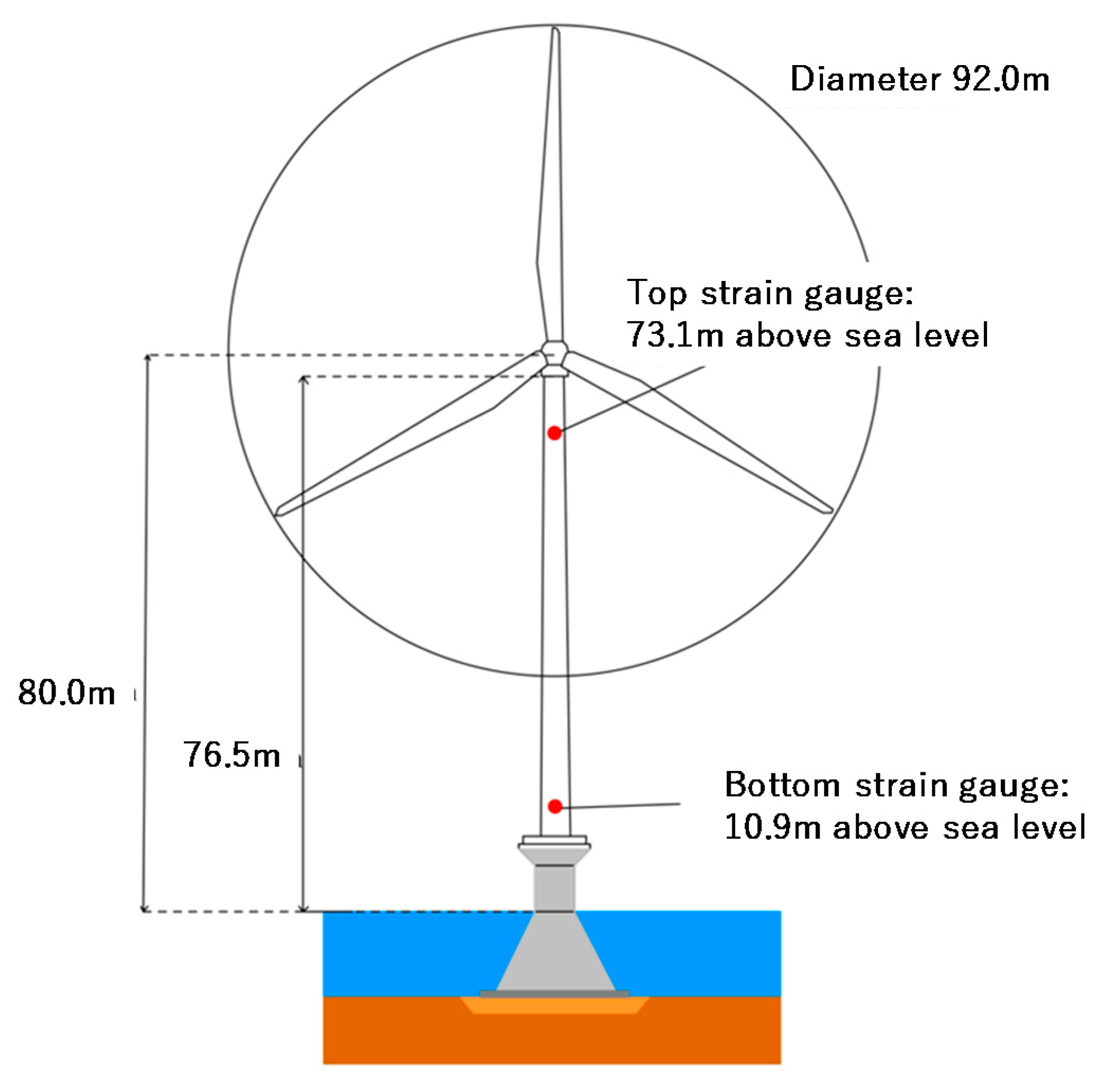
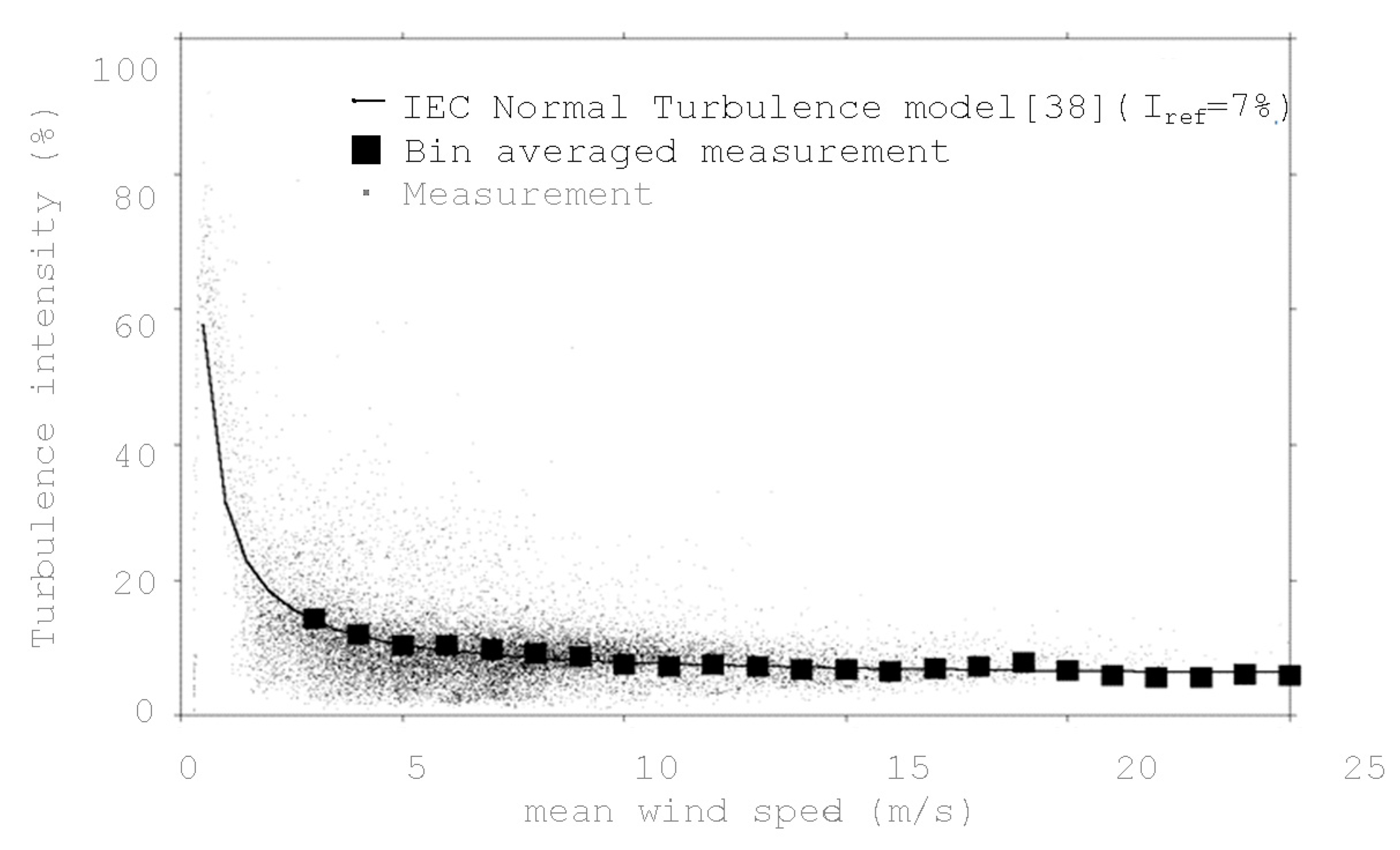
2.1. Wind Turbine Model and Turbulent Wind Condition
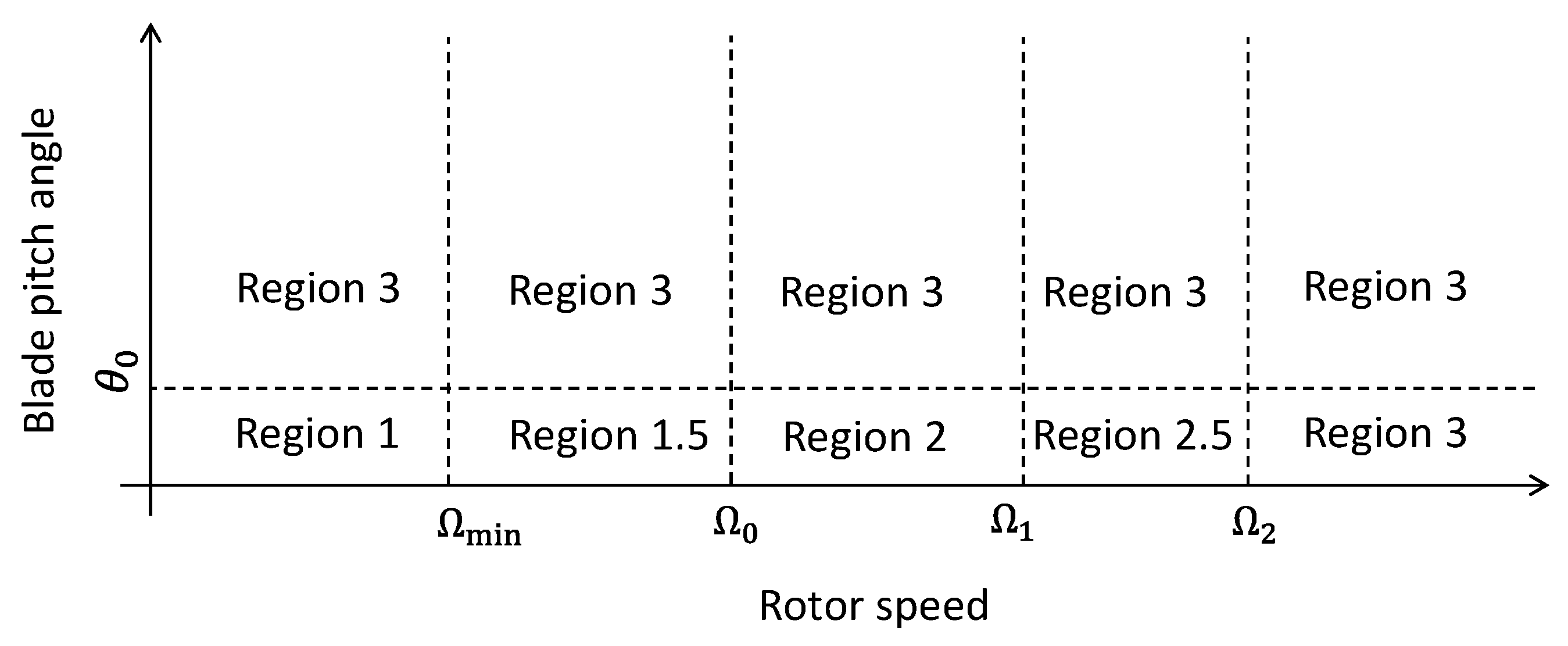
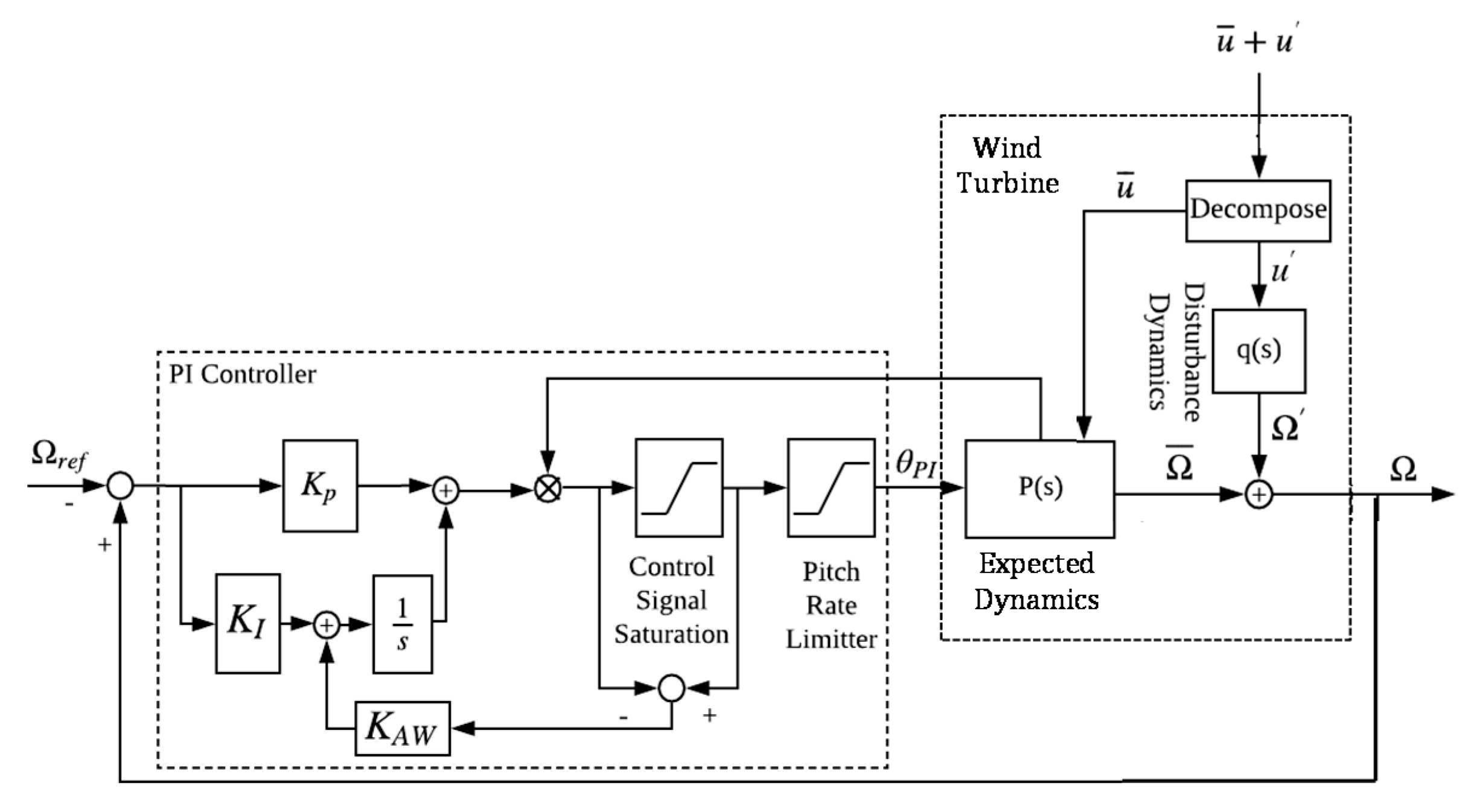
2.2. Baseline Controller
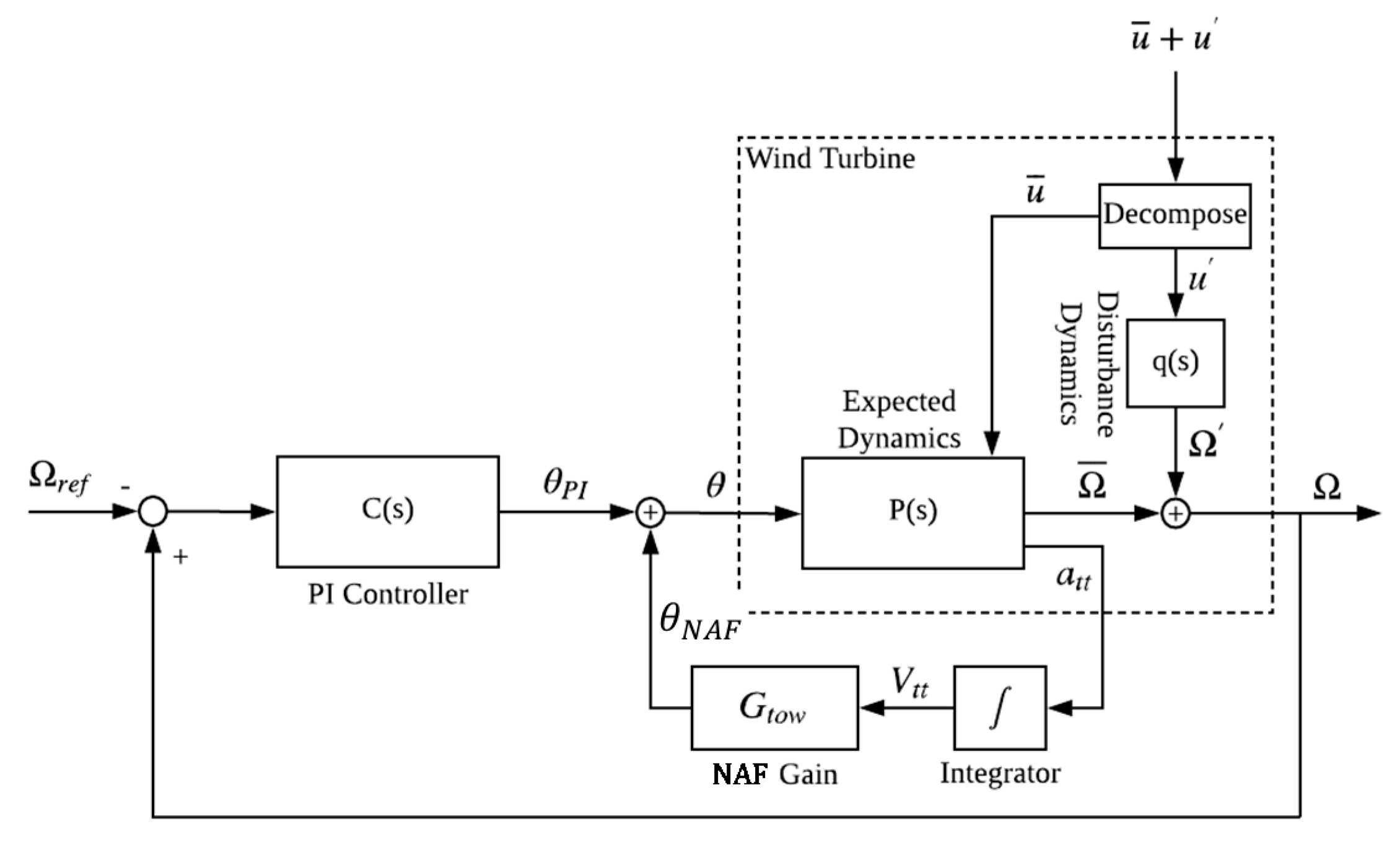
2.3. Nacelle Acceleration Feedback Control
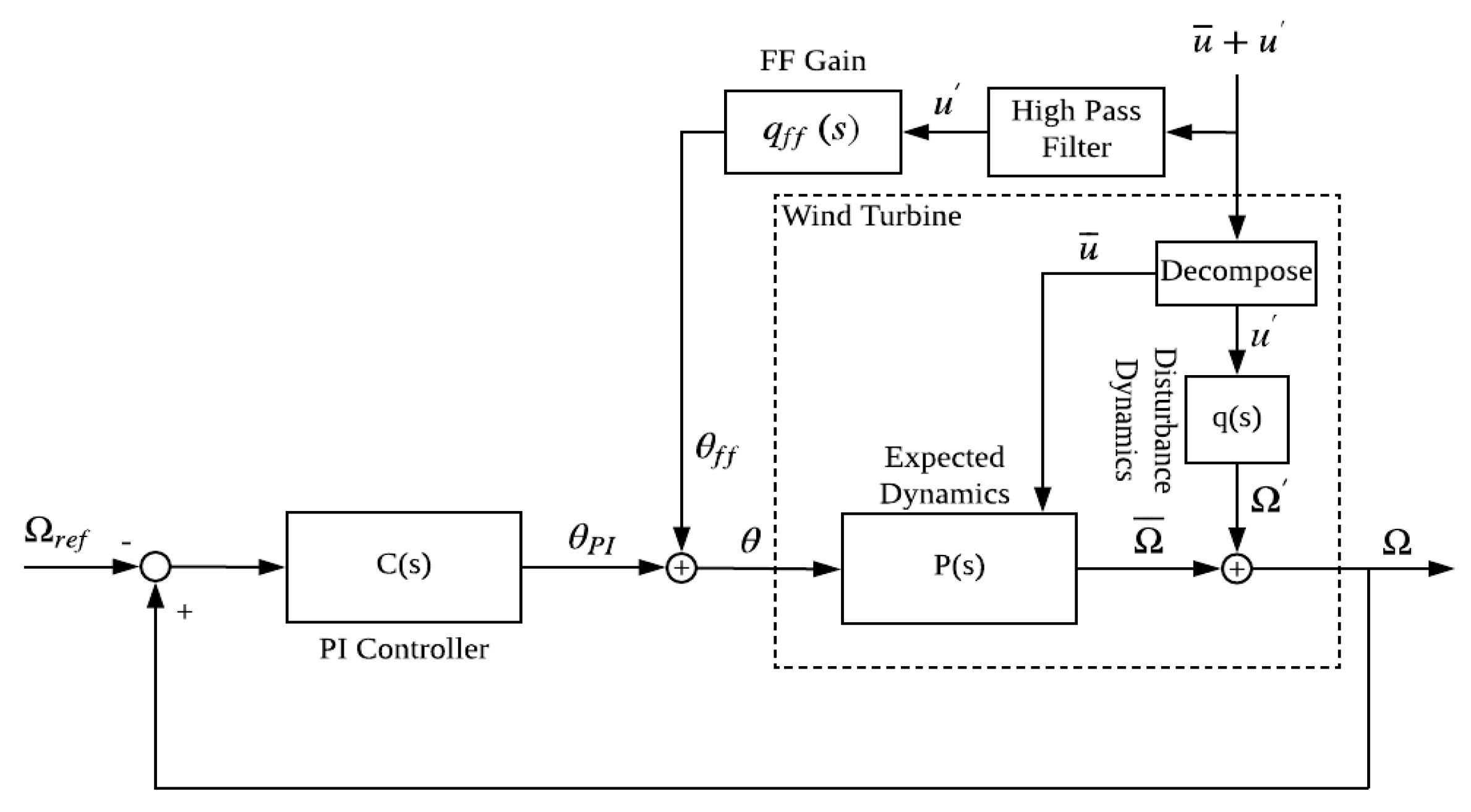
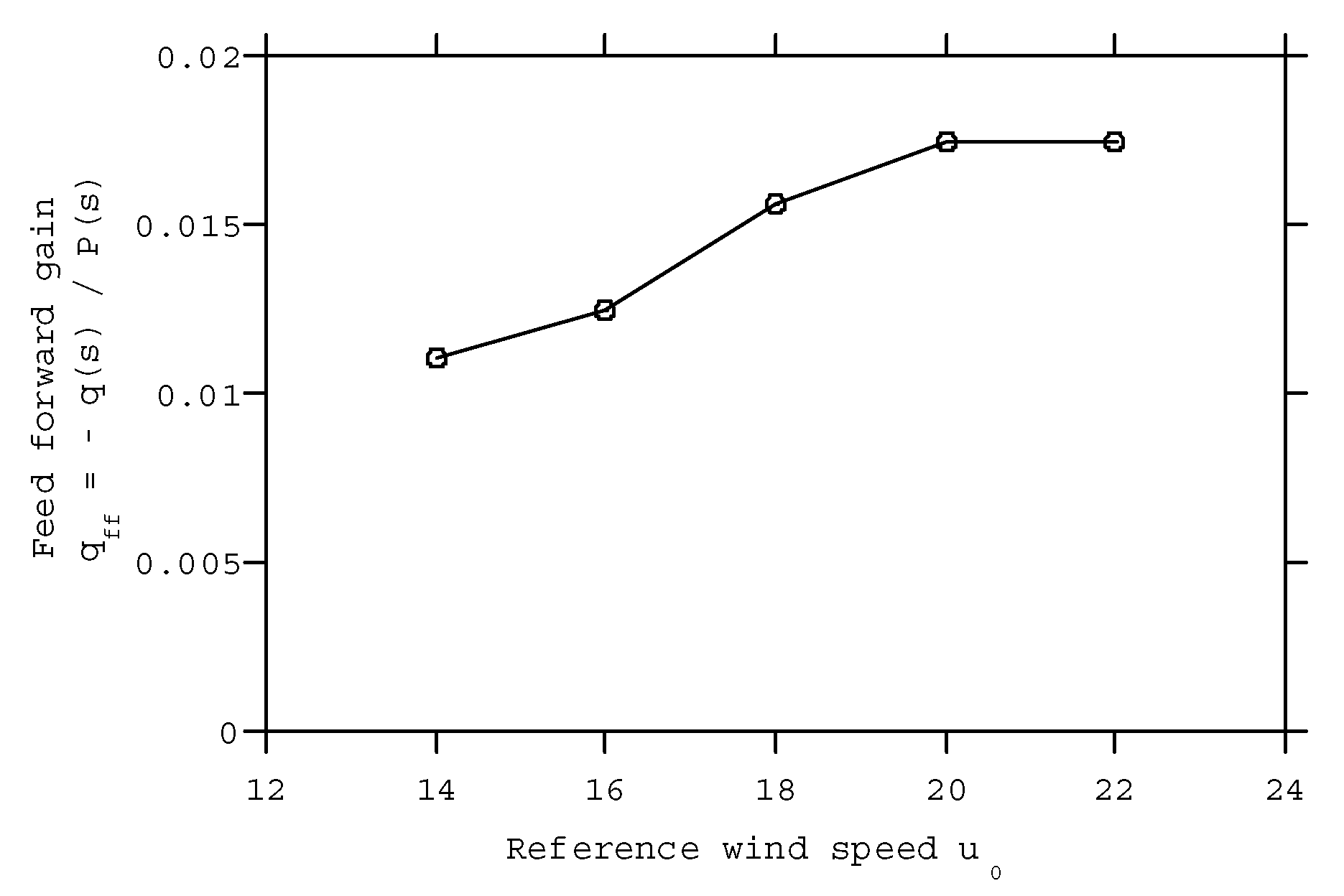
2.4. Lidar-Based Feedforward Control
3. Effects of Each Control on Tower Loads and Rotor Speeds
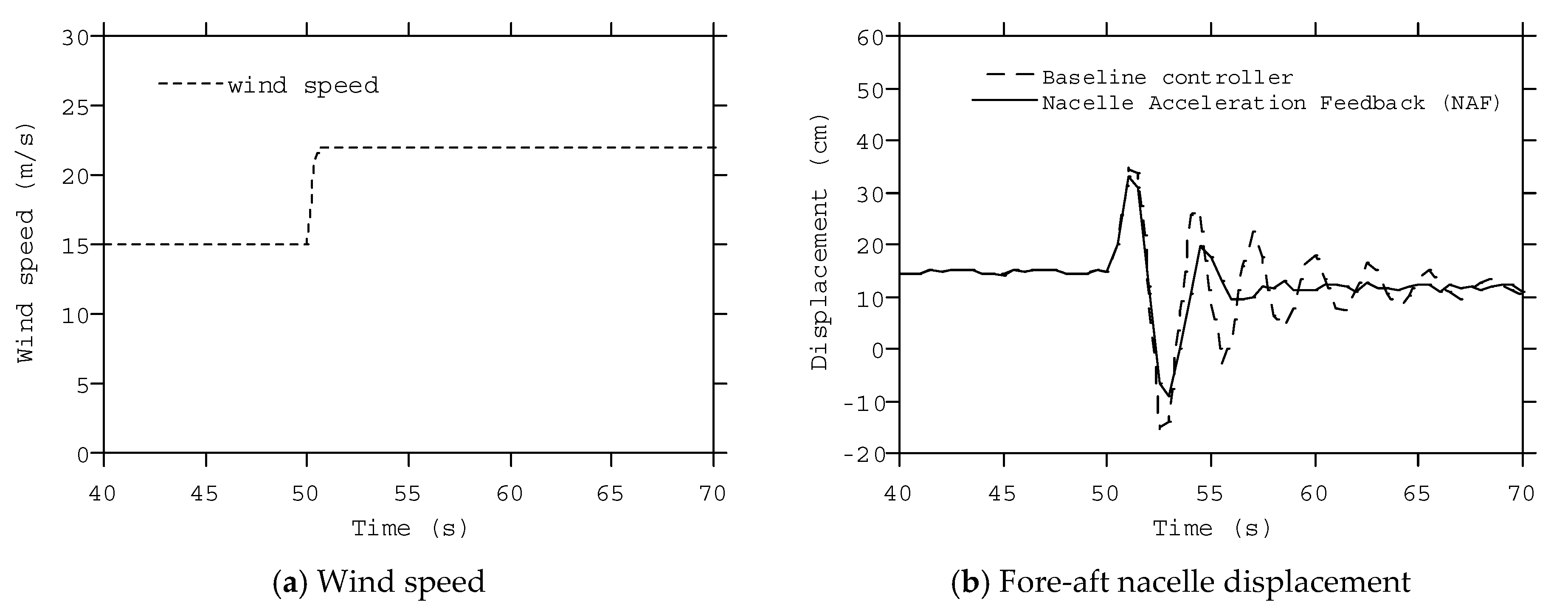
3.1. Effect of the Nacelle Acceleration Feedback Controller
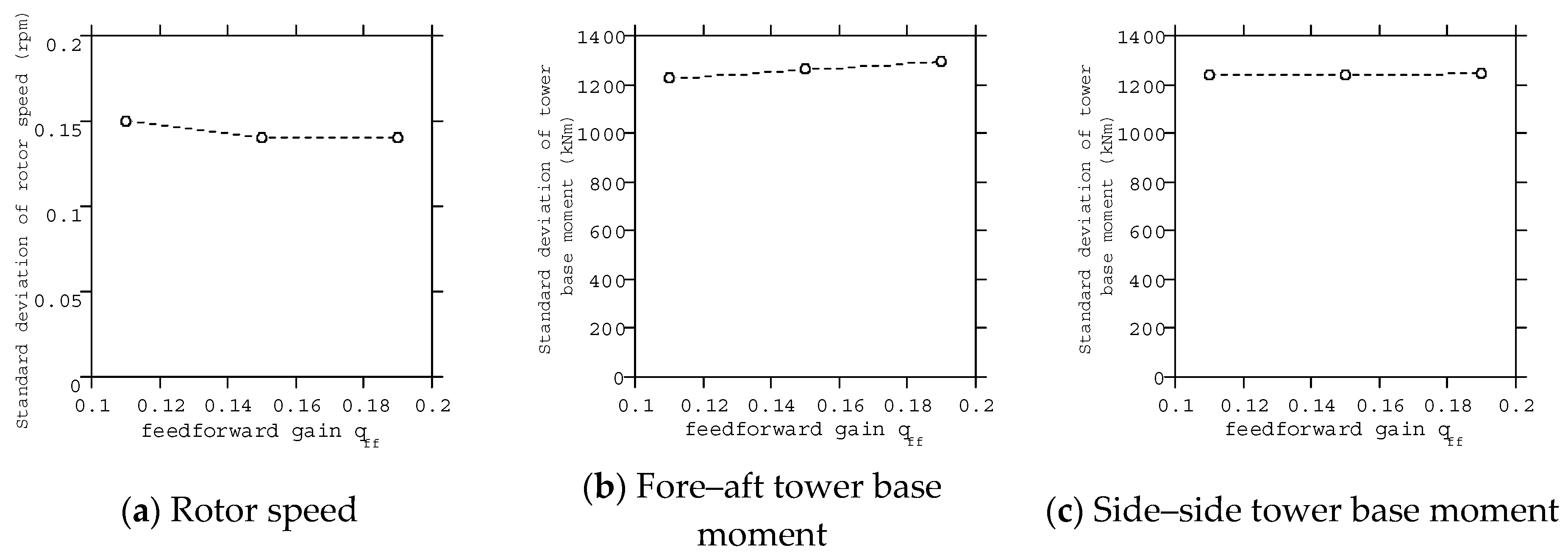
3.2. Effect of the Lidar-Based Feedforward Controller
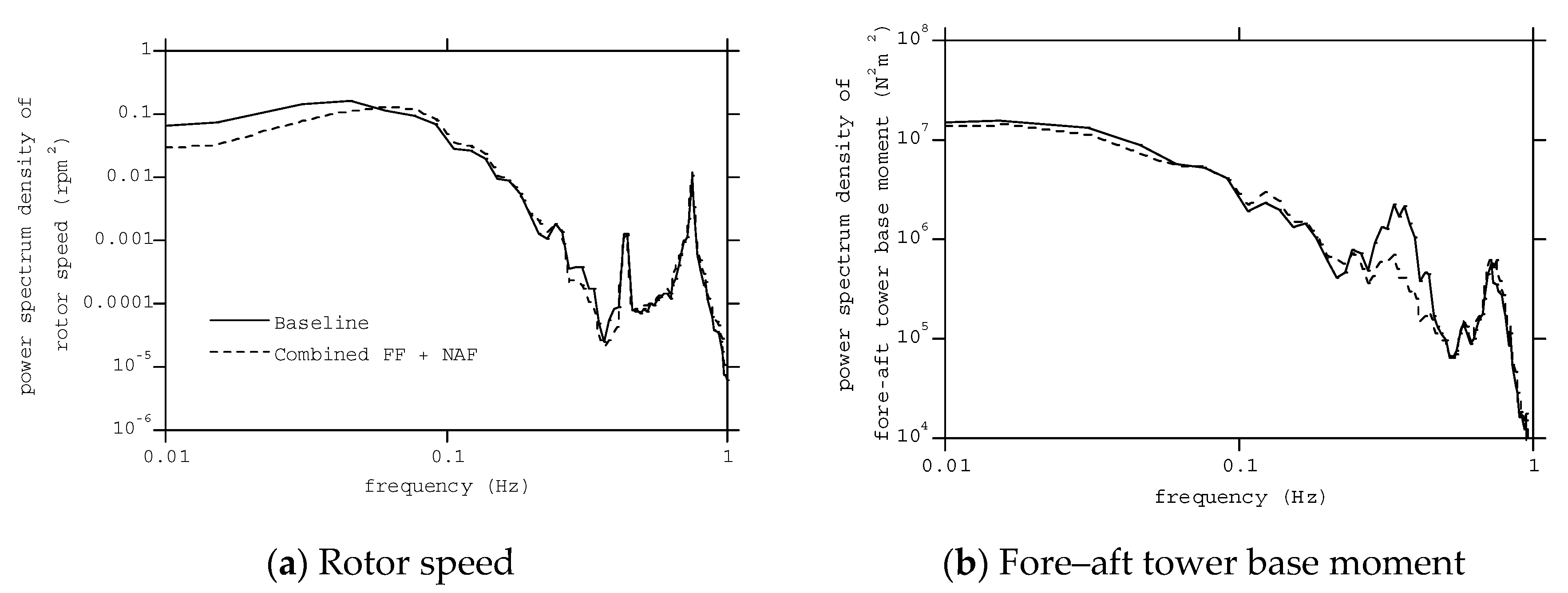
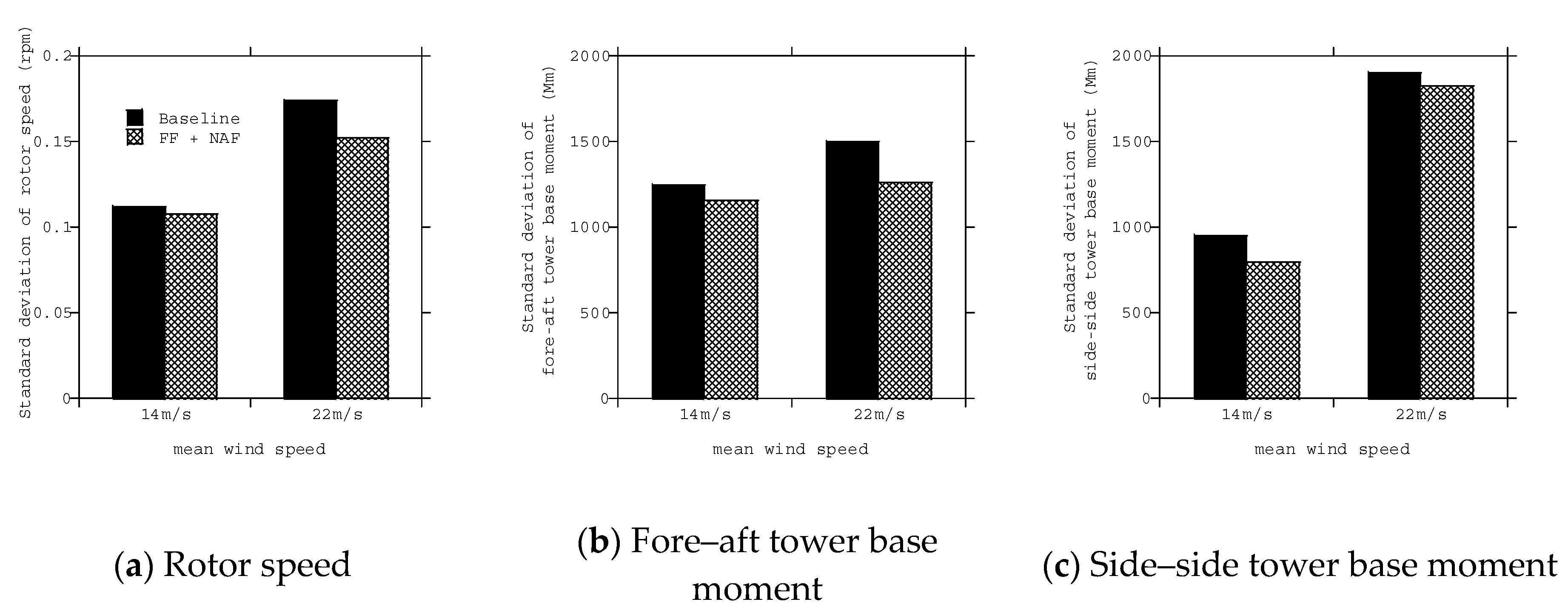
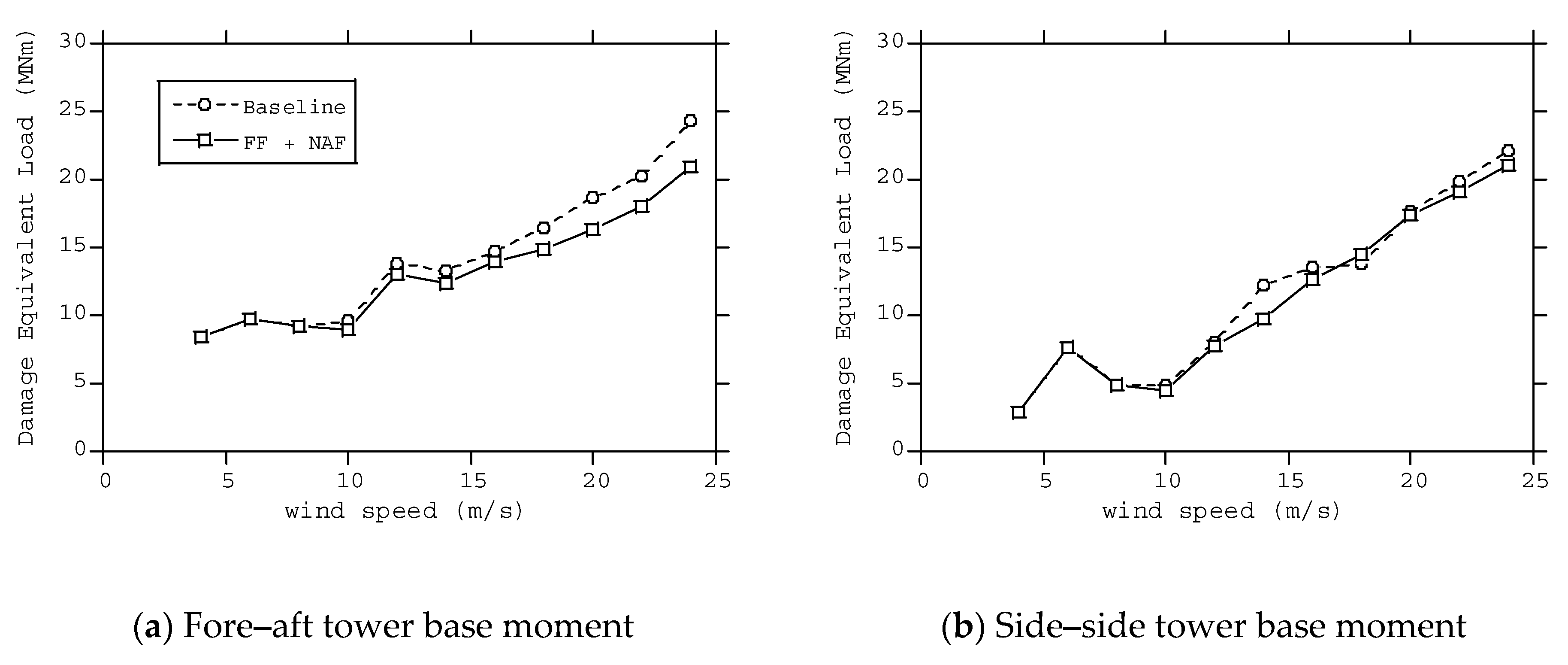
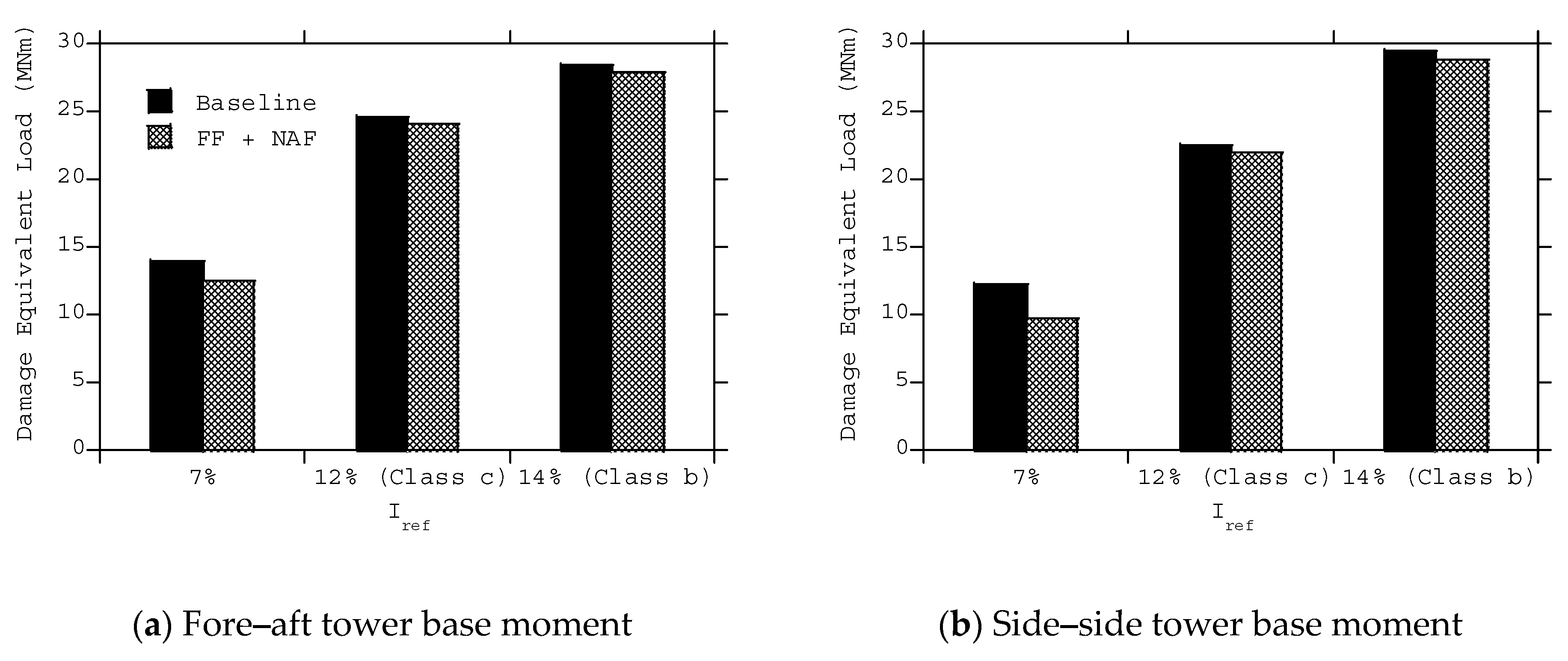
3.3. Effect of a Combined Feedback and Feedforward Controller
4. Conclusions
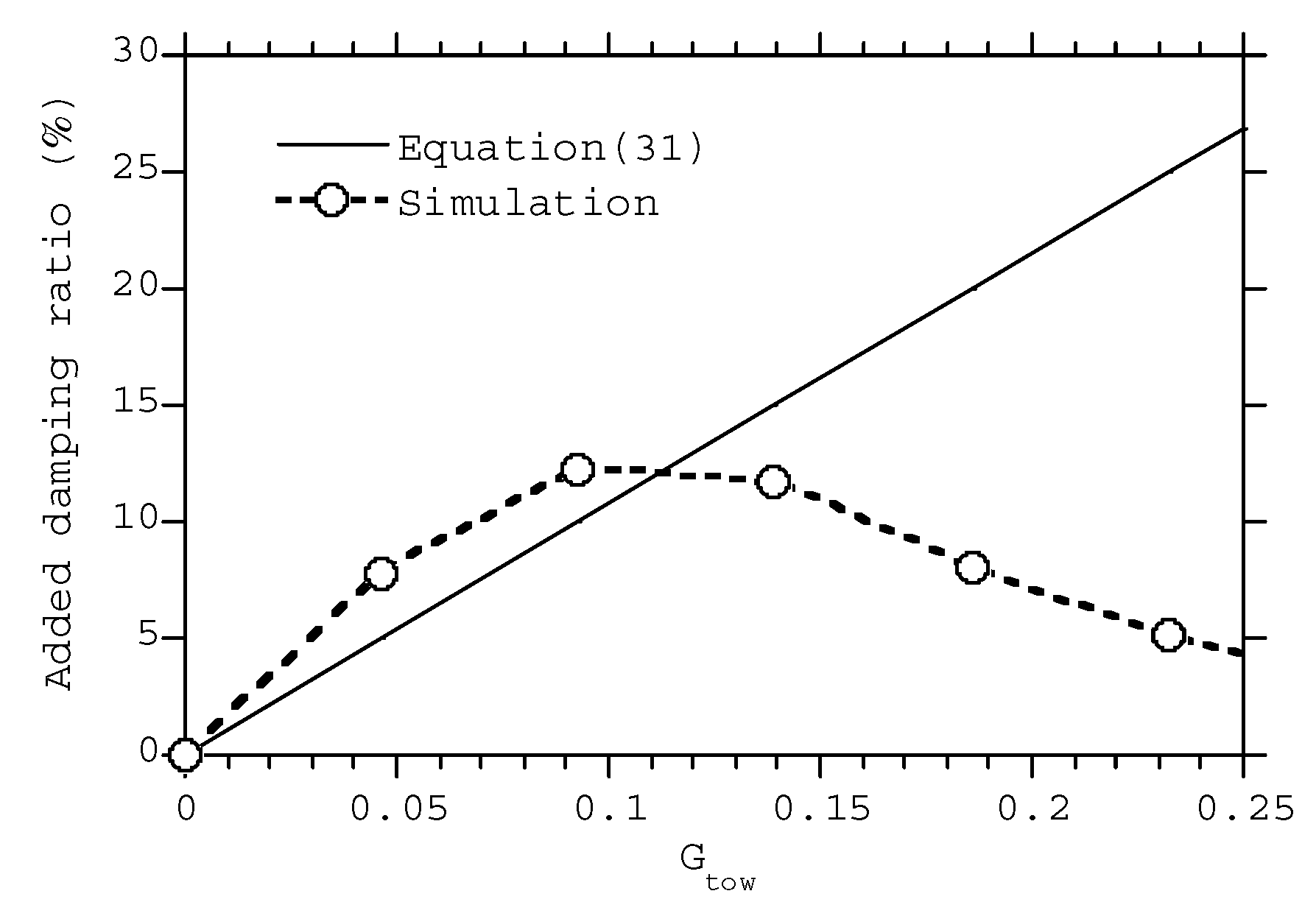
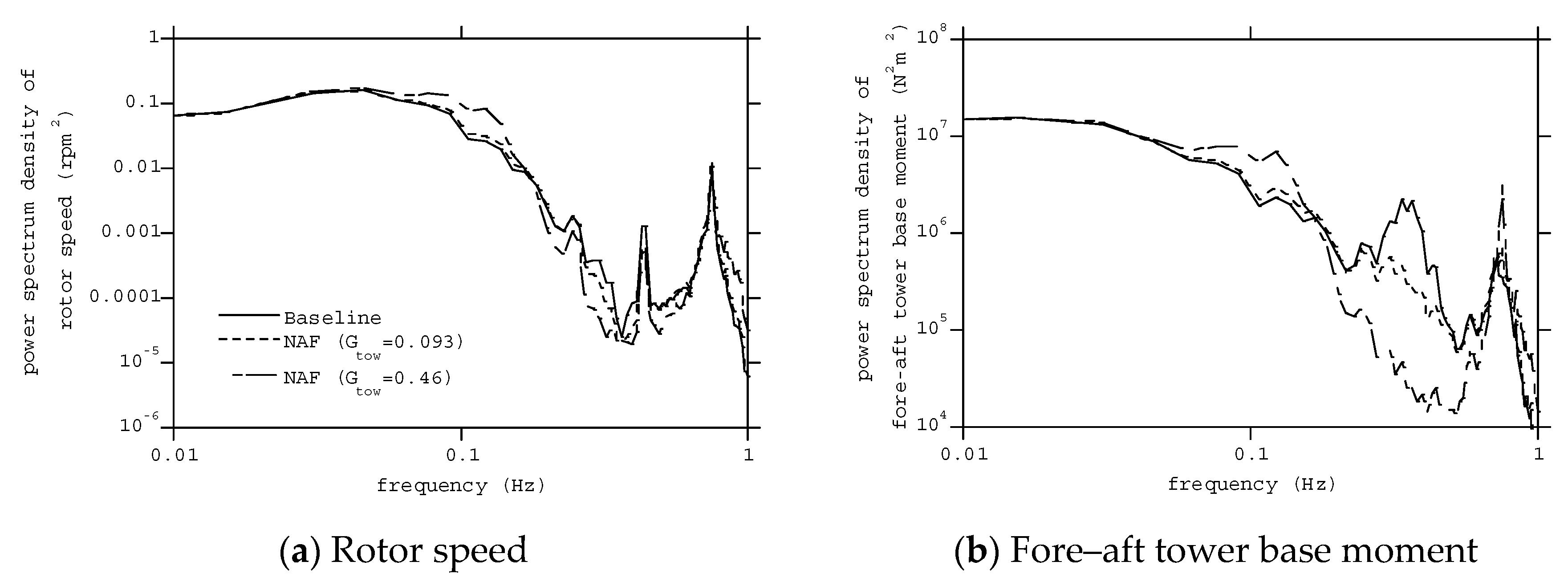
- The nacelle acceleration feedback control increases the damping ratio of the first mode of wind turbines, but it also increases the fluctuation in the rotor speed and thrust force, which results in the existence of the optimum gain value.
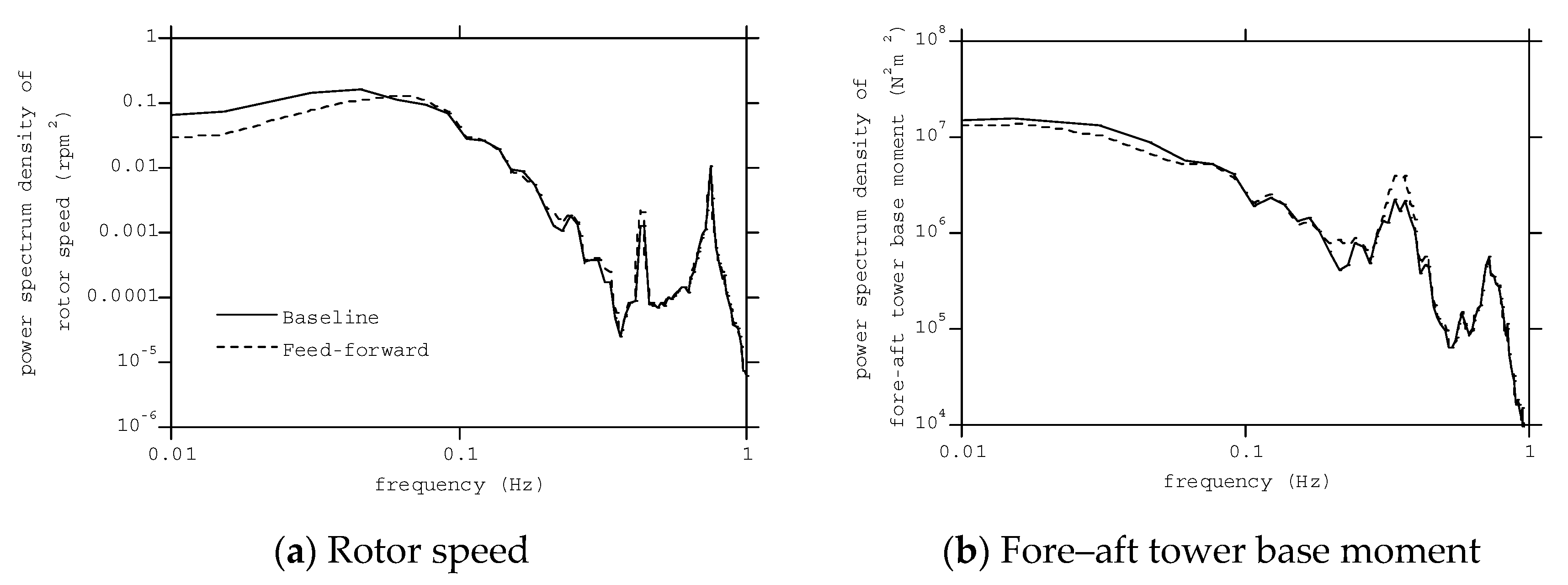
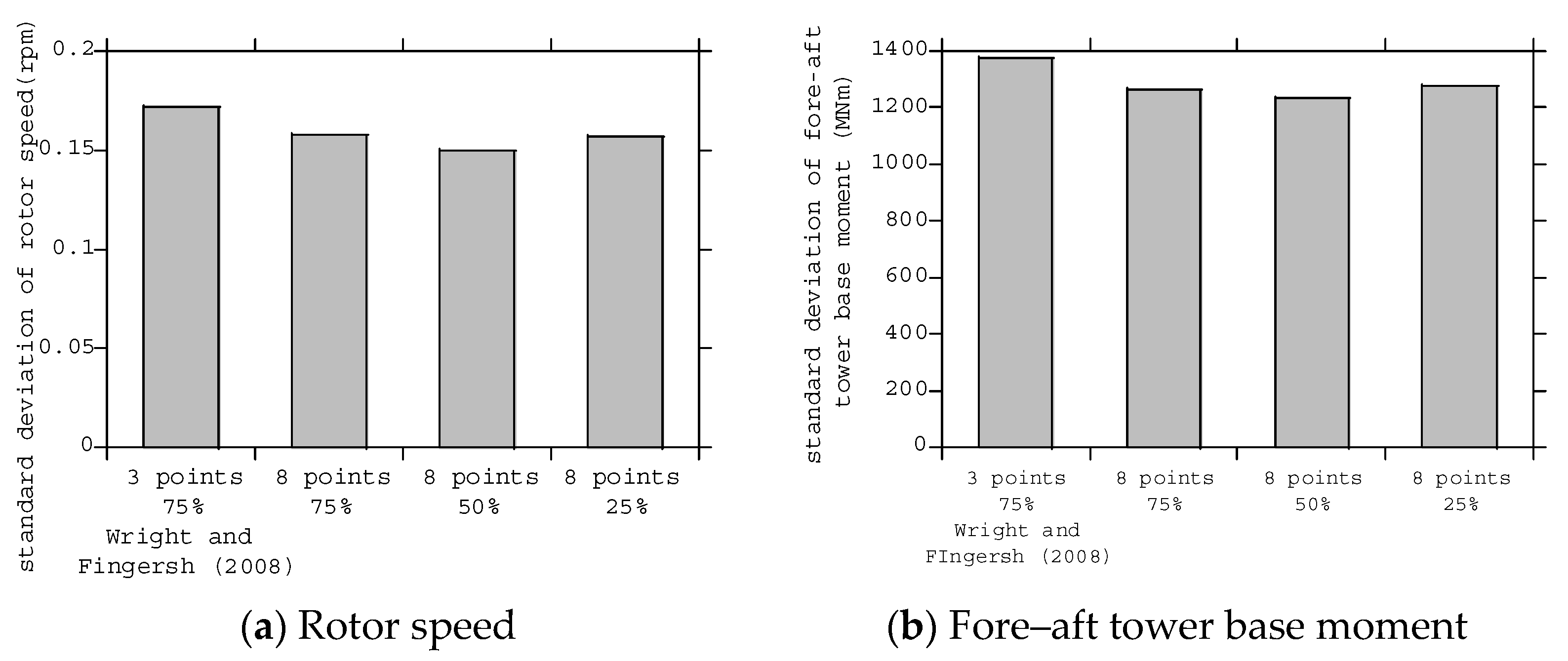
- The lidar-based feedforward control reduces the fluctuation in the rotor speed and the thrust force by decreasing the fluctuating wind load on the rotor, which results in less fluctuating load on the tower.
- The combination of the nacelle acceleration feedback control and the lidar-based feedforward control successfully reduces both the response of the tower first mode and the fluctuation in the rotor speed at the same time.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bossanyi, E.A. The design of closed loop controllers for wind turbines. Wind Energy 2000, 3, 149–163. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore system Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
- Hansen, M.H.; Hansen, A.; Larsen, T.J.; Sorensen, S.O.; Fuglsang, P. Control Design for a Pitch-Regulated, Variable-Speed Wind Turbine; Risø-R-1500(EN); Risø National Laboratory: Roskilde, Denmark, 2005.
- Yoshida, S. Variable speed-variable pitch controllers for aero-servo-elastic simulations of wind turbine support structures. J. Fluid Sci. Technol. 2011, 6, 300–312. [Google Scholar] [CrossRef] [Green Version]
- Yousefi, I.; Yamaguchi, A.; Ishihara, T. The effect of control on the responses of an offshore wind turbine. In Proceedings of the Grand Renewable Energy 2018, Yokohama, Japan, 17–22 June 2018. [Google Scholar]
- Stol, K.A.; Zhao, W.; Wright, A.D. Individual blade pitch control for the controls advanced research turbine (CART). J. Solar Energy Eng. 2006, 128, 498–505. [Google Scholar] [CrossRef]
- Zhao, W.; Stol, K. Individual blade pitch for active yaw control of a horizontal-axis wind turbine. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007; p. 1022. [Google Scholar]
- Sarkar, S.; Chen, L.; Fitzgerald, B.; Basu, B. Multi-resolution wavelet pitch controller for spar-type floating offshore wind turbines including wave-current interactions. J. Sound Vib. 2020, 470, 115170. [Google Scholar] [CrossRef]
- Kristalny, M.; Madjidian, D.; Knudsen, T. On using wind speed preview to reduce wind turbine tower oscillations. IEEE Trans. Control Syst. Technol. 2013, 21, 1191–1198. [Google Scholar] [CrossRef] [Green Version]
- Nam, Y.; Kien, P.T.; La, Y.H. Alleviating the tower, mechanical load of multi-MW wind turbines with LQR control. J. Power Electron. 2013, 13, 1024–1031. [Google Scholar] [CrossRef] [Green Version]
- De Battista, H.; Ricardo, J.M.; Christiansen, C.F. Dynamical sliding mode power control of wind driven induction generators. IEEE Trans. Energy Convers. 2000, 15, 451–457. [Google Scholar] [CrossRef]
- Fleming, P.; Wingerden, J.W.; Wright, A. Comparing state-space multivariable controls to multi-siso controls for load reduction of drivetrain-coupled modes on wind turbines through field-testing. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 1152. [Google Scholar]
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Kong, X.; Ma, L.; Liu, X.; Abdelbaky, M.A.; Wu, Q. Wind Turbine Control Using Nonlinear Economic Model Predictive Control over All Operating Regions. Energies 2020, 13, 184. [Google Scholar] [CrossRef] [Green Version]
- Bossanyi, E.A. Wind turbine control for load reduction. Wind Energy 2003, 6, 229–244. [Google Scholar] [CrossRef]
- Leithead, W.E.; Dominguez, S.; Spruce, C. Analysis of tower/blade interaction in the cancellation of the tower fore-aft mode via control. In Proceedings of the European Wind Energy Conference, London, UK, 22–25 November 2004. [Google Scholar]
- Jonkman, J.M. Influence of control on pitch damping of a floating wind turbine. In Proceedings of the ASME Wind Energy Symposium, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Murtagh, P.J.; Ghosh, A.; Basu, B.; Broderick, B.M. Passive control of wind turbine vibrations including blade/tower interaction and rotationally sampled turbulence. Wind Energy 2008, 11, 305–317. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B. Passive control of floating offshore wind turbine nacelle and spar vibrations by multiple tuned mass dampers. Struct. Control Health Monit. 2015, 22, 152–176. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Sarkar, S.; Staino, A. Improved reliability of wind turbine towers with active tuned mass dampers (ATMDs). J. Sound Vib. 2018, 419, 103–122. [Google Scholar] [CrossRef]
- Scholbrock, A.; Fleming, P.; Schilpf, D.; Wright, A.; Johnson, K.; Wang, N. Lidar-enhanced wind turbine control: Past, Present and Future. In Proceedings of the 2016 American Control Conference, Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Wright, A.D.; Fingersh, L.J. Advanced Control Design for Wind Turbines Part I: Control Design, Implementation, and Initial Tests; Technical Report NREL/TP-500-42437; National Renewable Energy Laboratory: Golden, CO, USA, 2008.
- Dunne, F.; Pao, L.C.; Wright, A.D.; Jonkman, B.; Kelley, N.; Smiley, E. Adding feedforward blade pitch control for load mitigation in wind turbines: Non-Causal Series Expansion, Preview Control, and Optimized FIR Filter Methods. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 2–7 January 2011. [Google Scholar]
- Dunne, F.; Smiley, E.; Pao, L.C. LIDAR Wind Speed Measurement Analysis and Feed-Forward Blade Pitch Control for Load Mitigation in Wind Turbines; NREL/SR-5000-52098; National Renewable Energy Laboratory: Golden, CO, USA, 2011.
- Dunne, F.; Pao, L.C. Optimal blade pitch control with realistic preview wind measurements. Wind Energy 2016, 19, 2153–2169. [Google Scholar] [CrossRef]
- Holger, F.; Schlipf, D.; Latour, M.I.; Cheng, P.W. Design and evaluation of a Lidar-based feedforward controller for the INNWIND. EU 10 MW wind turbine. In Proceedings of the Science & Research Abstract for EWEA 2015 Annual Event, Paris, France, 17–20 November 2015. [Google Scholar]
- Schlipf, D.; Schlipf, D.J.; Kühn, M. Nonlinear model predictive control of wind turbines using LIDAR. Wind Energy 2013, 16, 1107–1129. [Google Scholar] [CrossRef]
- Ungurán, R.; Petrović, V.; Boersma, S.; van Wingerden, J.W.; Pao, L.Y.; Kühn, M. Feedback-feedforward individual pitch control design for wind turbines with uncertain measurements. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 29 August 2019. [Google Scholar]
- Selvam, K.; Kanev, S.; van Wingerden, J.W.; van Engelen, T.; Verhaegen, M. Feedback–feedforward individual pitch control for wind turbine load reduction. Robust Nonlinear Control 2009, 19, 72–91. [Google Scholar] [CrossRef] [Green Version]
- Verwaal, N.W.; van der Veen, G.J.; van Wingerden, J.W. Predictive control of an experimental wind turbine using preview wind speed measurements. Wind Energy 2015, 18, 385–398. [Google Scholar] [CrossRef]
- Koerber, A.; King, R. Combined feedback–feedforward control of wind turbines using state- constrained model predictive control. IEEE Trans. Control Syst. Technol. 2013, 21, 1117–1128. [Google Scholar] [CrossRef]
- Schlipf, D.; Pao, L.Y.; Cheng, W. Comparison of feed-forward and model predictive control of wind turbines using Lidar. In Proceedings of the 51st IEEE conference on decision and control, Maui, HI, USA, 10–13 December 2012. [Google Scholar]
- Wang, N.; Johnson, K.E.; Wright, A.D. FX-RLS-based feedforward control for LIDAR-enabled wind turbine load mitigation. IEEE Trans. Control Syst. Technol. 2012, 20, 1212–1222. [Google Scholar] [CrossRef]
- Evans, M.E.; Cannon, M.; Kouvaritakis, B. Robust MPC tower damping for variable speed wind turbines. IEEE Trans. Control Syst. Technol. 2015, 23, 290–296. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Sarli, P.W.; Ishihara, T. Extreme load estimation of the wind turbine tower during power production. Wind Eng. 2019. Prepublished. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide; NREL/TP-500-38230; National Renewable Energy Laboratory: Golden, CO, USA, 2005.
- Jonkman, J.M.; Buhl, M.L., Jr. TurbSim User’s Guide; NREL/TP-500-39797; National Renewable Energy Laboratory: Golden, CO, USA, 2006.
- IEC61400-1. Wind Turbines-Part 1: Design Requirements, 3rd ed.; International Electrotechnical Commission: Geneva, Switzerland, 2008. [Google Scholar]
- Freebury, G.; Musial, W. Determining Equivalent Damage Loading for Full-Scale Wind Turbine Blade Fatigue Tests. In Proceedings of the 19th American Society of Mechanical Engineers (ASME) Wind Energy Symposium, Reno, NV, USA, 10–13 January 2000. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated capacity | 2.4 MW |
| Hub height | 80 m |
| Rotor diameter () | 92 m |
| Pitch control | Pitch to feather |
| Rotor speed | Variable speed (9–15 rpm) |
| Rated wind speed | 13 m/s |
| Optimum tip speed ratio | 8.2 |
| Cp at the optimum tip speed ratio | 0.47 |
| Cut-in wind speed | 4 m/s |
| Cut-out wind speed | 25 m/s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamaguchi, A.; Yousefi, I.; Ishihara, T. Reduction in the Fluctuating Load on Wind Turbines by Using a Combined Nacelle Acceleration Feedback and Lidar-Based Feedforward Control. Energies 2020, 13, 4558. https://doi.org/10.3390/en13174558
Yamaguchi A, Yousefi I, Ishihara T. Reduction in the Fluctuating Load on Wind Turbines by Using a Combined Nacelle Acceleration Feedback and Lidar-Based Feedforward Control. Energies. 2020; 13(17):4558. https://doi.org/10.3390/en13174558
Chicago/Turabian StyleYamaguchi, Atsushi, Iman Yousefi, and Takeshi Ishihara. 2020. "Reduction in the Fluctuating Load on Wind Turbines by Using a Combined Nacelle Acceleration Feedback and Lidar-Based Feedforward Control" Energies 13, no. 17: 4558. https://doi.org/10.3390/en13174558
APA StyleYamaguchi, A., Yousefi, I., & Ishihara, T. (2020). Reduction in the Fluctuating Load on Wind Turbines by Using a Combined Nacelle Acceleration Feedback and Lidar-Based Feedforward Control. Energies, 13(17), 4558. https://doi.org/10.3390/en13174558