Cooperative Control for Multi-Module Charging Systems of Ultracapacitors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We propose the cooperative cascade control for multiple charging modules to restrain the current imbalance and increase the life of charging modules.
- The closed-loop transfer function matrix is proposed to describe the charging system. The design of the controllers is illustrated with a practical case study.
- Extensive simulation and experiment results verify the effectiveness and superiority of the proposed method in the charging of ultracapacitors.
2. System Modeling
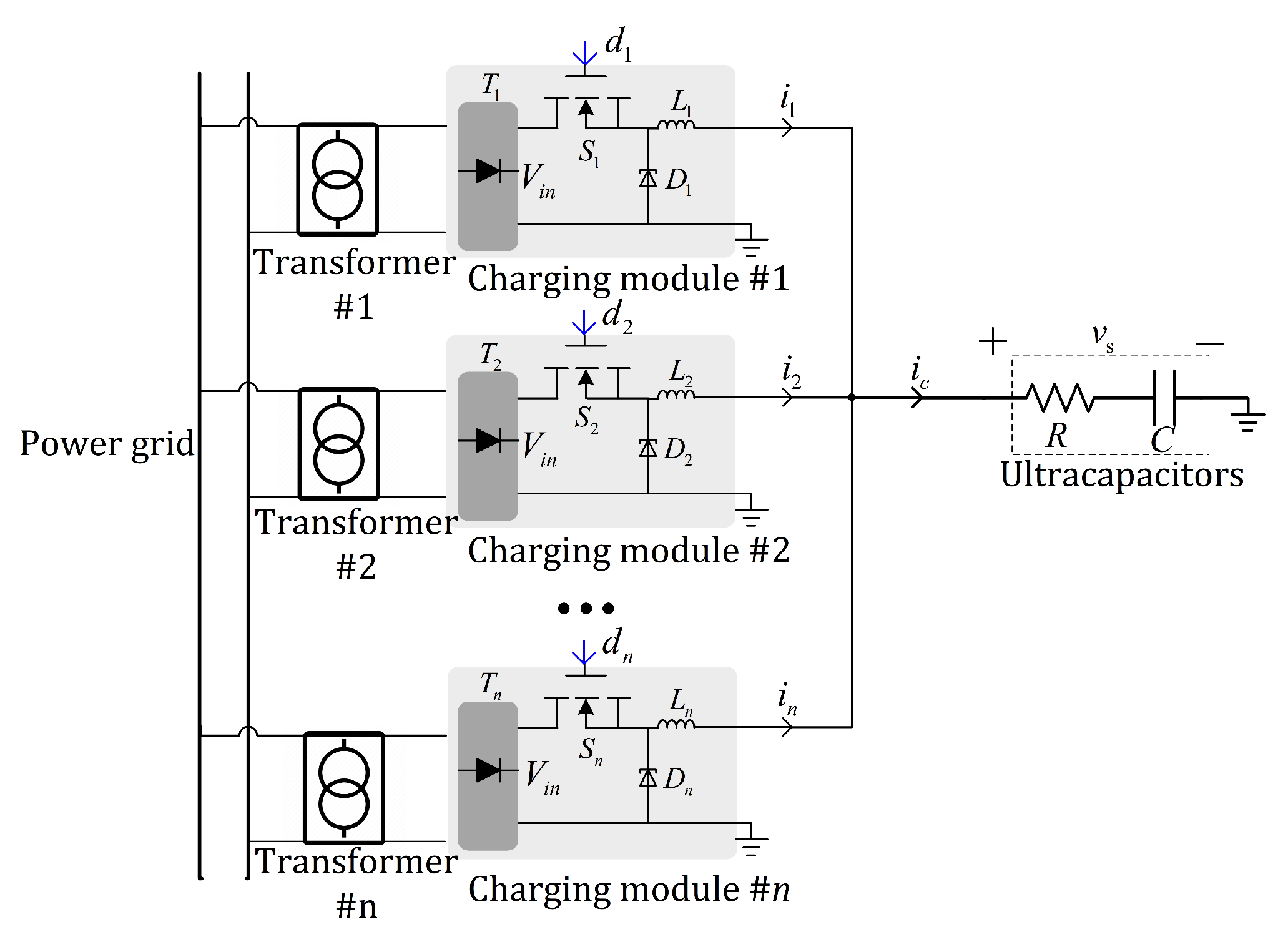
2.1. Physical Modeling
2.2. Cyber Modeling
3. Cooperative Cascade Charging
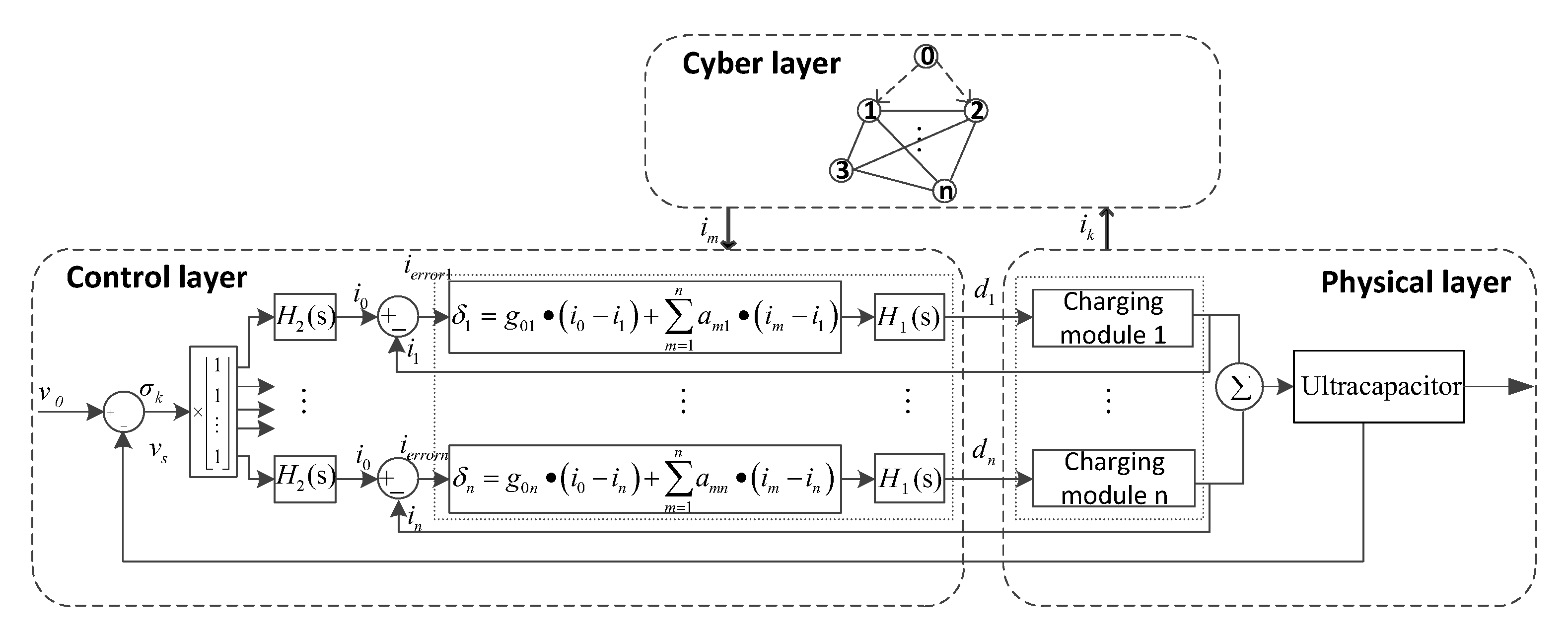
3.1. Cyber-Physical Representation
3.2. Cooperative Current Control
3.3. Pinning-Based Voltage Control
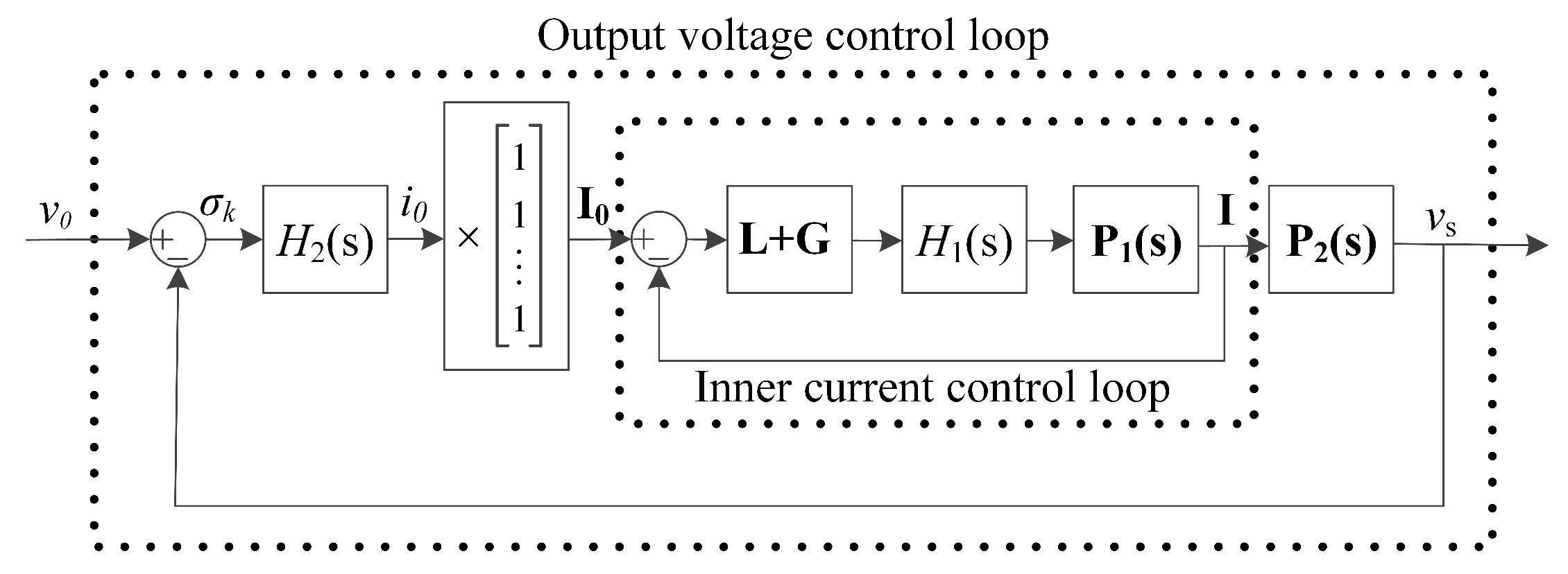
3.4. Closed-Loop Modeling
4. Case Studies
4.1. Parameter Setting
4.1.1. Physical Parameters
4.1.2. Cyber Parameters
4.1.3. Control Parameters
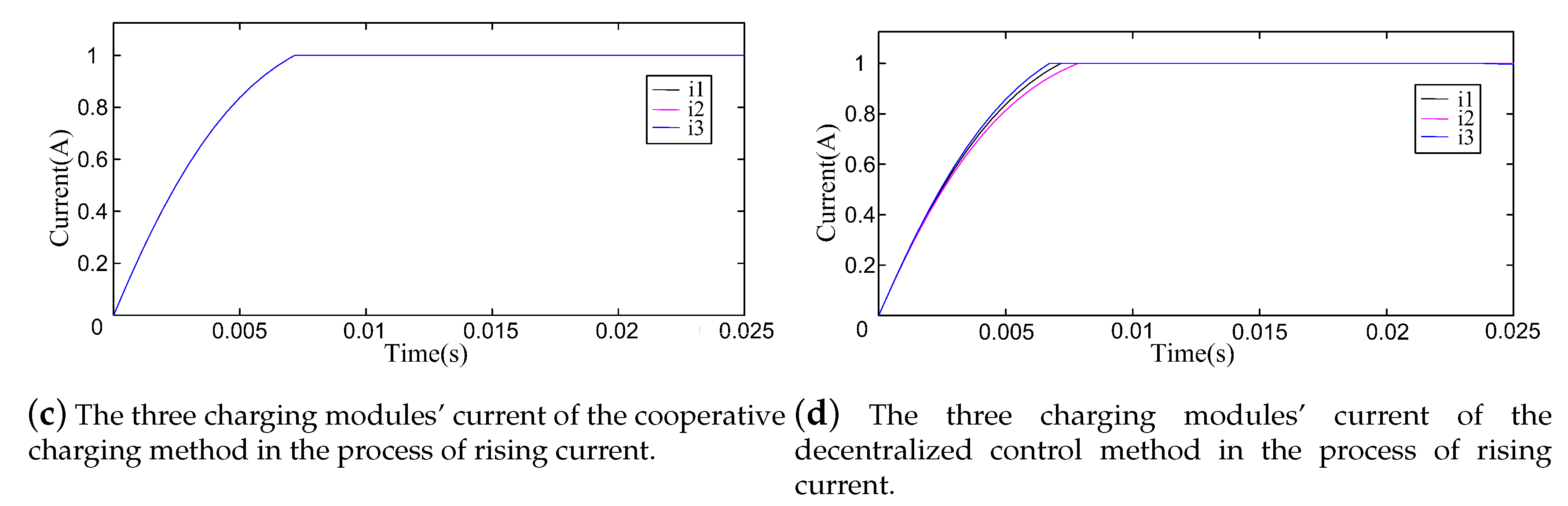
4.2. Simulation Results
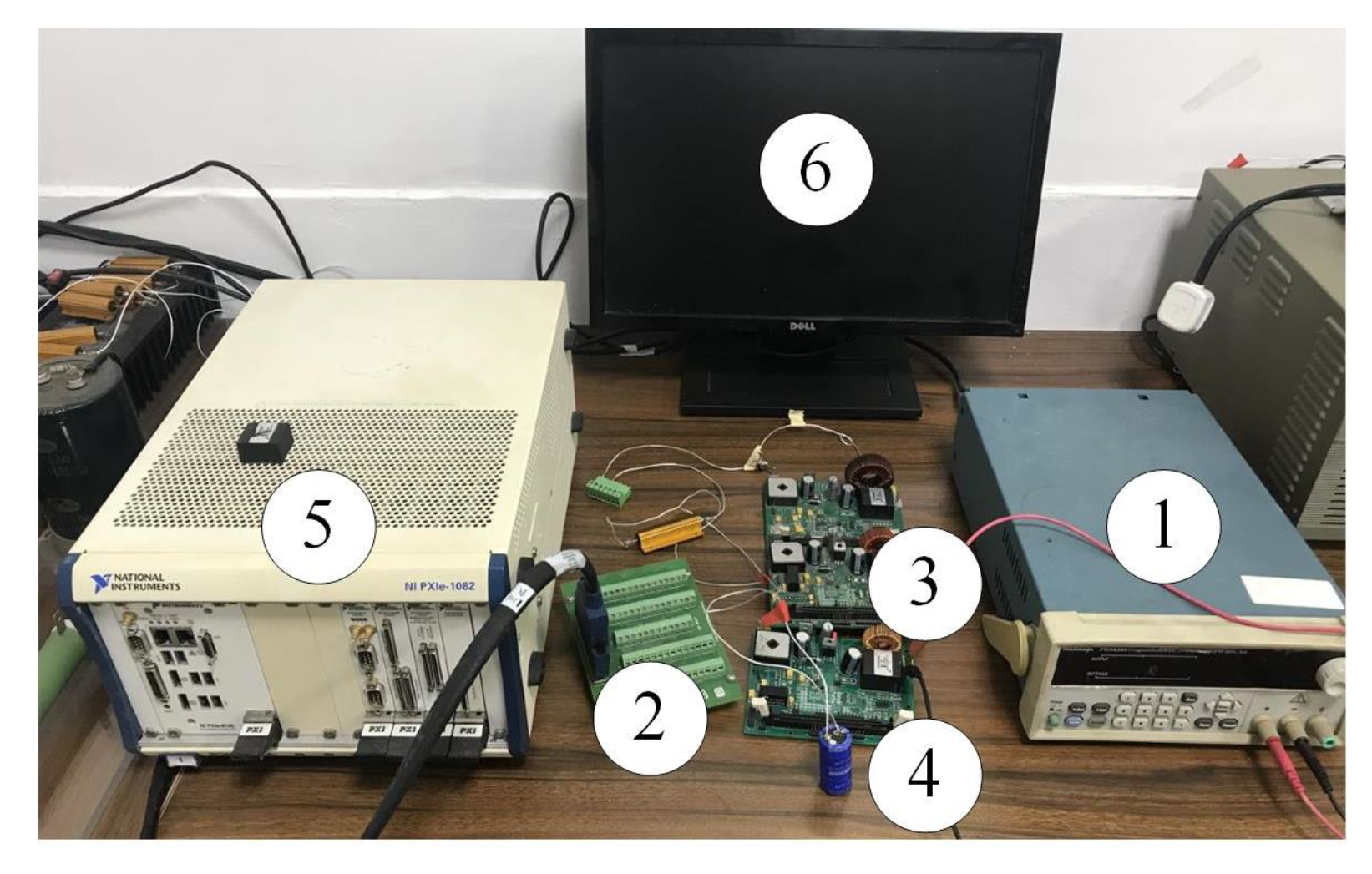
4.3. Hardware Setup
4.4. Experiment Results
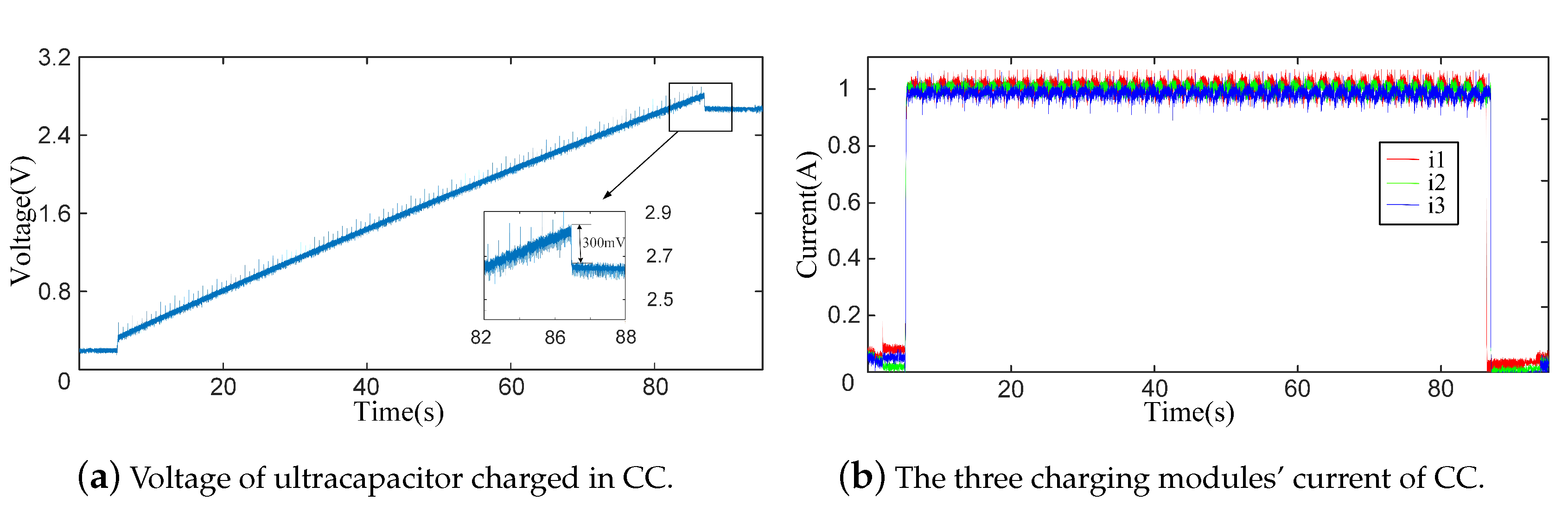
4.4.1. Constant-Current Charging
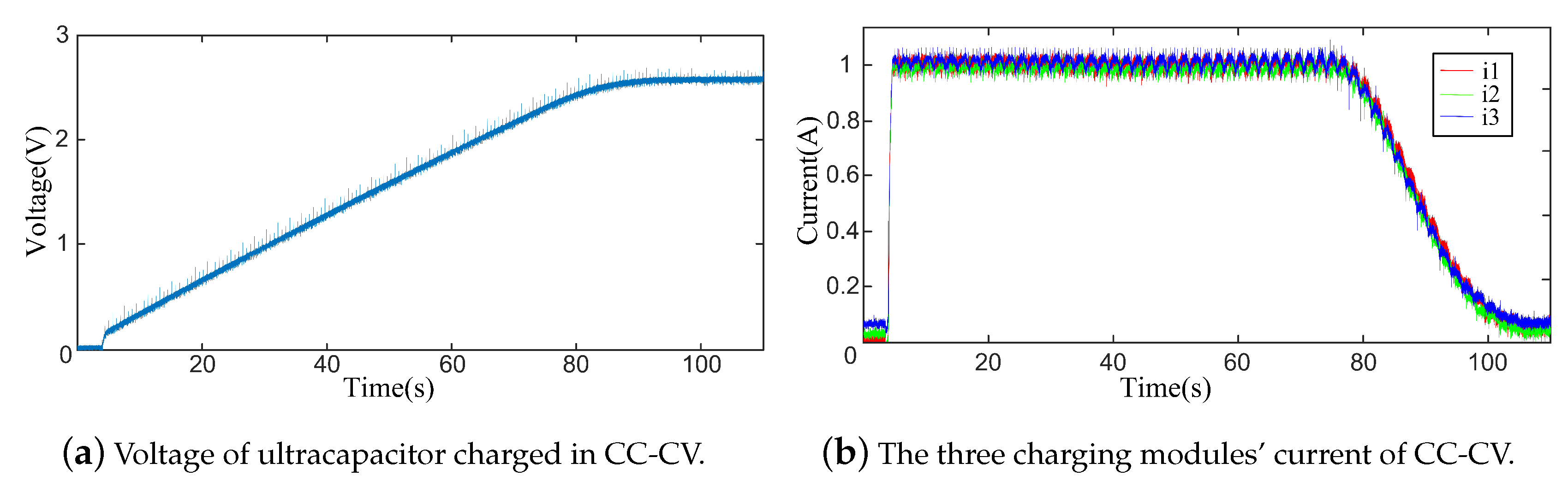
4.4.2. Constant Current-Constant Voltage Charging
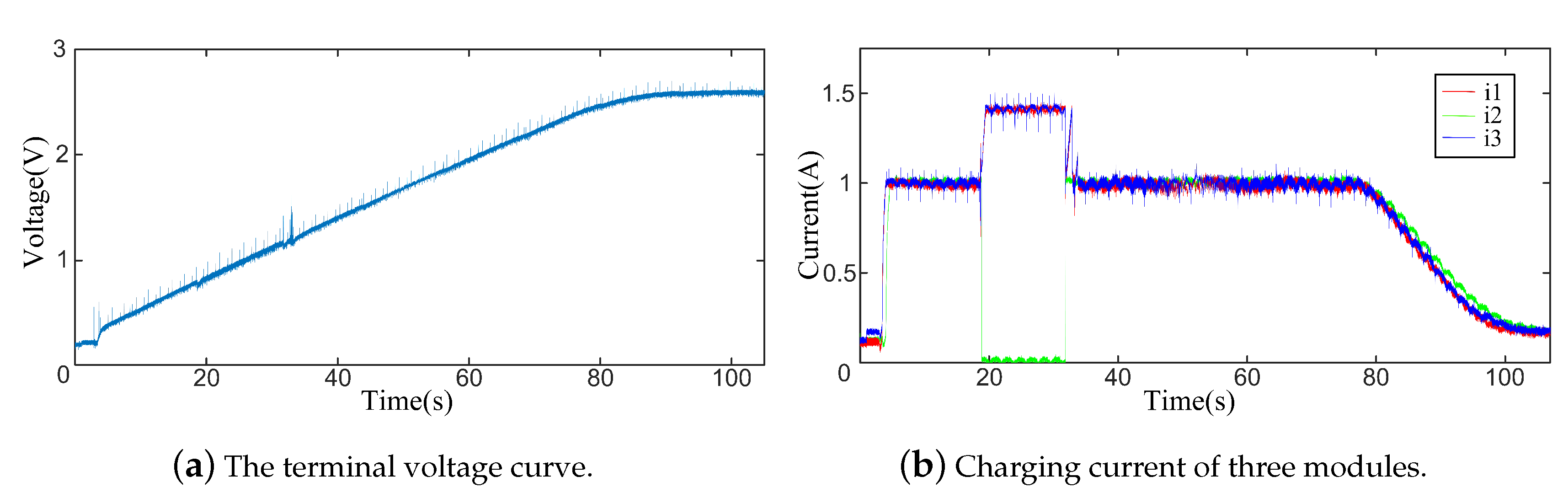
4.5. Fault-Tolerant Charging
4.6. Discussions
4.6.1. Effectiveness
4.6.2. Superiority
4.6.3. Scalability
4.6.4. Fault Tolerance
4.6.5. Communication Delays
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Y.; Wei, Z.; Li, H.; Cai, L.; Pan, J. Optimal charging scheduling for catenary-free trams in public transportation systems. IEEE Trans. Smart Grid 2017, 10, 227–237. [Google Scholar] [CrossRef]
- Li, H.; Peng, J.; He, J.; Zhou, R.; Huang, Z.; Pan, J. A cooperative charging protocol for onboard supercapacitors of catenary-free trams. IEEE Trans. Control Syst. Technol. 2017, 26, 1219–1232. [Google Scholar] [CrossRef]
- Jabbour, N.; Mademlis, C. Supercapacitor-based energy recovery system with improved power control and energy management for elevator applications. IEEE Trans. Power Electron. 2017, 32, 9389–9399. [Google Scholar] [CrossRef]
- Sun, L.; Feng, K.; Chapman, C.; Zhang, N. An adaptive power-split strategy for battery–supercapacitor powertrain—design, simulation, and experiment. IEEE Trans. Power Electron. 2017, 32, 9364–9375. [Google Scholar] [CrossRef]
- El Mejdoubi, A.; Chaoui, H.; Gualous, H.; Sabor, J. Online parameter identification for supercapacitor state-of-health diagnosis for vehicular applications. IEEE Trans. Power Electron. 2017, 32, 9355–9363. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, W.; Li, G. Stochastic control of predictive power management for battery/supercapacitor hybrid energy storage systems of electric vehicles. IEEE Trans. Ind. Inform. 2017, 14, 3023–3030. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, G. Experimental study on a semi-active battery-supercapacitor hybrid energy storage system for electric vehicle application. IEEE Trans. Power Electron. 2019, 35, 1014–1021. [Google Scholar] [CrossRef]
- German, R.; Sari, A.; Briat, O.; Vinassa, J.M.; Venet, P. Impact of voltage resets on supercapacitors aging. IEEE Trans. Ind. Electron. 2016, 63, 7703–7711. [Google Scholar] [CrossRef] [Green Version]
- Naseri, F.; Farjah, E.; Ghanbari, T.; Kazemi, Z.; Schaltz, E.; Schanen, J.L. Online parameter estimation for supercapacitor state-of-energy and state-of-health determination in vehicular applications. IEEE Trans. Ind. Electron. 2019, 67, 7963–7972. [Google Scholar] [CrossRef]
- Parvini, Y.; Vahidi, A.; Fayazi, S.A. Heuristic versus optimal charging of supercapacitors, lithium-ion, and lead-acid batteries: An efficiency point of view. IEEE Trans. Control Syst. Technol. 2017, 26, 167–180. [Google Scholar] [CrossRef]
- Yıldırım, D.; Akşit, M.H.; Yolaçan, C.; Pul, T.; Ermiş, C.; Aghdam, B.H.; Çadırcı, I.; Ermiş, M. Full-Scale physical simulator of all SiC traction motor drive with onboard supercapacitor ESS for Light-Rail public transportation. IEEE Trans. Ind. Electron. 2019, 67, 6290–6301. [Google Scholar] [CrossRef]
- Uno, M.; Tanaka, K. Single-switch multioutput charger using voltage multiplier for series-connected lithium-ion battery/supercapacitor equalization. IEEE Trans. Ind. Electron. 2012, 60, 3227–3239. [Google Scholar] [CrossRef]
- Luo, X.; He, J.; Zhu, S. On-board supercapacitors cooperative charging algorithm: Stability analysis and weight optimization. In Proceedings of the IEEE 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 4975–4980. [Google Scholar]
- Ibanez, F.M. Analyzing the need for a balancing system in supercapacitor energy storage systems. IEEE Trans. Power Electron. 2017, 33, 2162–2171. [Google Scholar] [CrossRef]
- Shili, S.; Hijazi, A.; Sari, A.; Lin-Shi, X.; Venet, P. Balancing circuit new control for supercapacitor storage system lifetime maximization. IEEE Trans. Power Electron. 2016, 32, 4939–4948. [Google Scholar] [CrossRef] [Green Version]
- Maneesut, K.; Supatti, U. Reviews of supercapacitor cell voltage equalizer topologies for EVs. In Proceedings of the 2017 IEEE 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 27–30 June 2017; pp. 608–611. [Google Scholar]
- Ding, L.; Han, Q.L.; Sindi, E. Distributed cooperative optimal control of DC microgrids with communication delays. IEEE Trans. Ind. Inform. 2018, 14, 3924–3935. [Google Scholar] [CrossRef]
- Choi, J.; Oh, S.; Horowitz, R. Distributed learning and cooperative control for multi-agent systems. Automatica 2009, 45, 2802–2814. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Zhang, X.; Peng, J.; He, J.; Huang, Z.; Wang, J. Cooperative CC-CV charging of supercapacitors using multi-charger systems. IEEE Trans. Ind. Electron. 2020, 67, 10497–10508. [Google Scholar] [CrossRef]
- Li, Q.; Su, B.; Pu, Y.; Han, Y.; Wang, T.; Yin, L.; Chen, W. A state machine control based on equivalent consumption minimization for fuel cell/supercapacitor hybrid tramway. IEEE Trans. Transp. Electrif. 2019, 5, 552–564. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Ogata, K.; Yang, Y. Modern Control Engineering; Prentice Hall India: New Delhi, India, 2002; Volume 4. [Google Scholar]
- Pavković, D.; Polak, S.; Zorc, D. PID controller auto-tuning based on process step response and damping optimum criterion. ISA Trans. 2014, 53, 85–96. [Google Scholar] [CrossRef]
- Newman, P.; Hargroves, K.; Davies-Slate, S.; Conley, D.; Verschuer, M.; Mouritz, M.; Yangka, D. The trackless tram: Is it the transit and city shaping catalyst we have been waiting for? J. Transp.Technol. 2018, 9, 31–55. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. Mag. 2007, 27, 71–82. [Google Scholar]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Lei, J.; Li, H.; Liao, H.; Peng, J. Cooperative Control for Multi-Module Charging Systems of Ultracapacitors. Energies 2020, 13, 5218. https://doi.org/10.3390/en13195218
Zhang X, Lei J, Li H, Liao H, Peng J. Cooperative Control for Multi-Module Charging Systems of Ultracapacitors. Energies. 2020; 13(19):5218. https://doi.org/10.3390/en13195218
Chicago/Turabian StyleZhang, Xiaoyong, Jiaxuan Lei, Heng Li, Hongtao Liao, and Jun Peng. 2020. "Cooperative Control for Multi-Module Charging Systems of Ultracapacitors" Energies 13, no. 19: 5218. https://doi.org/10.3390/en13195218
APA StyleZhang, X., Lei, J., Li, H., Liao, H., & Peng, J. (2020). Cooperative Control for Multi-Module Charging Systems of Ultracapacitors. Energies, 13(19), 5218. https://doi.org/10.3390/en13195218