Improved Position Control for an EGR Valve System with Low Control Frequency


Abstract
:1. Introduction
2. Conventional System and Position Control Methods
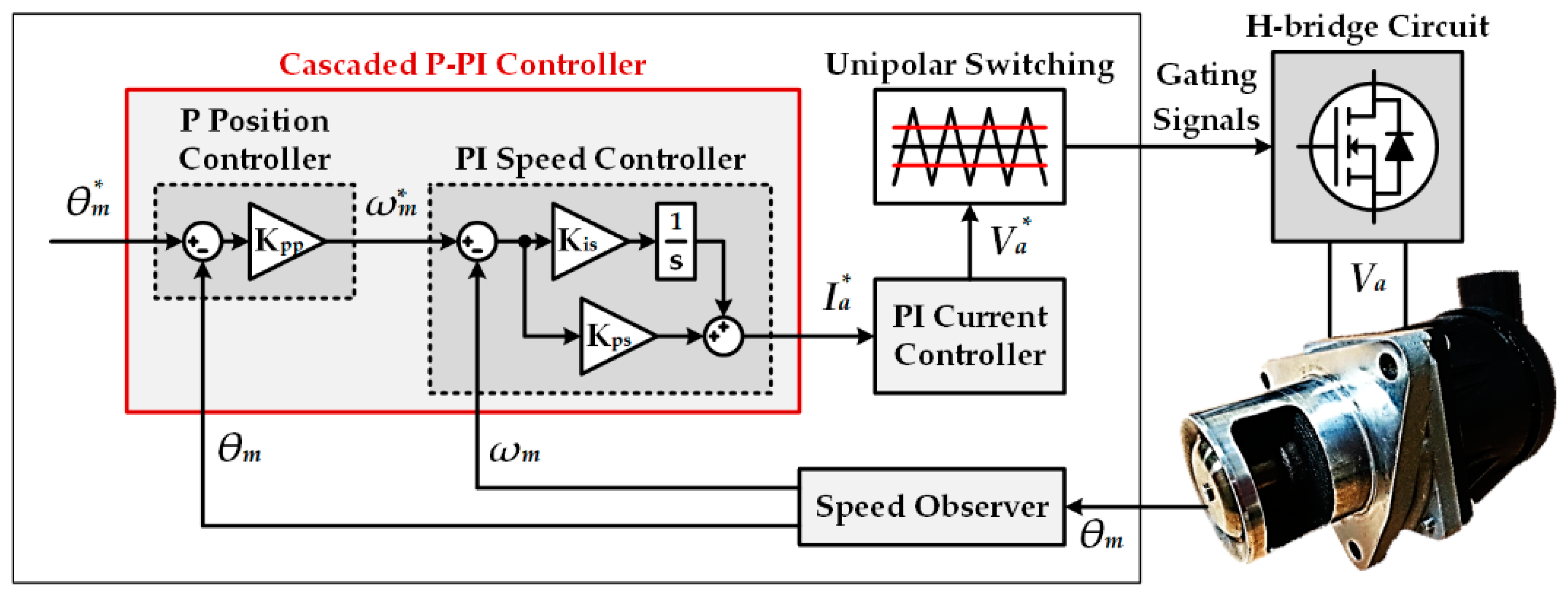
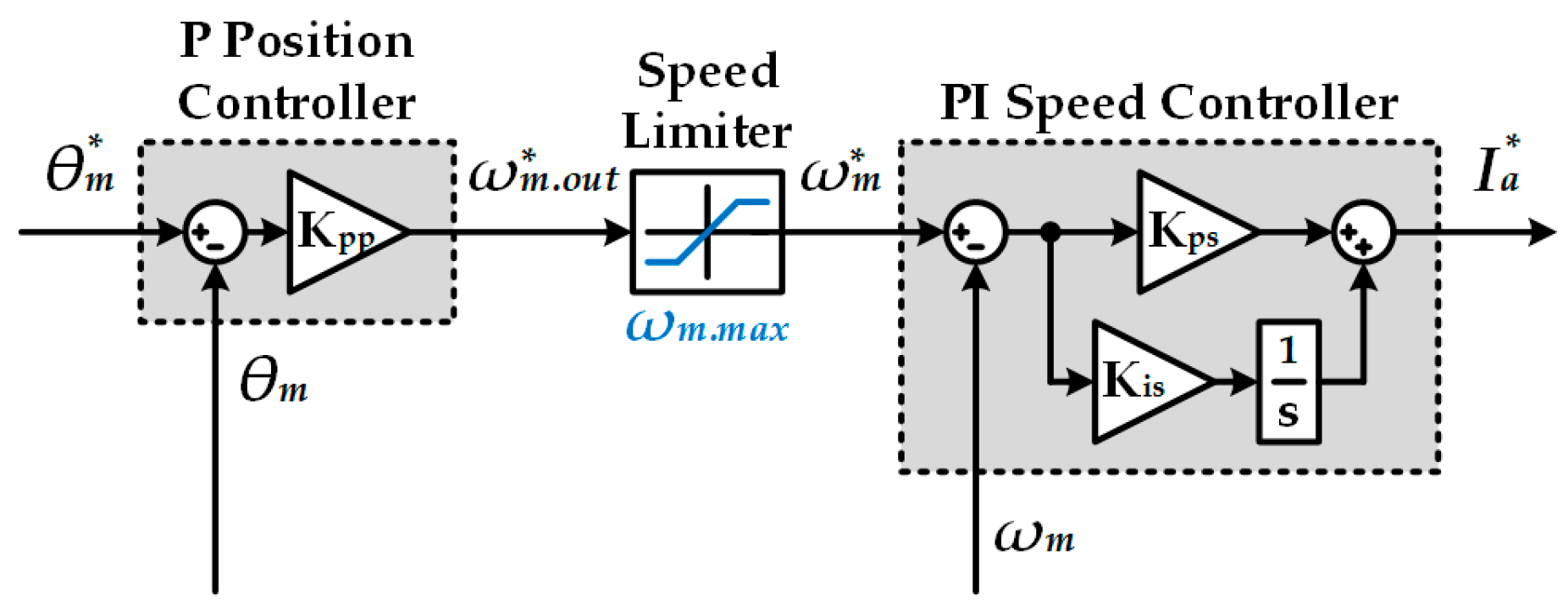
2.1. EGR Valve Position Control System
2.2. Feedforward Controller with a Position Pattern Generator
2.3. Acceleration Command Feedforward Controller
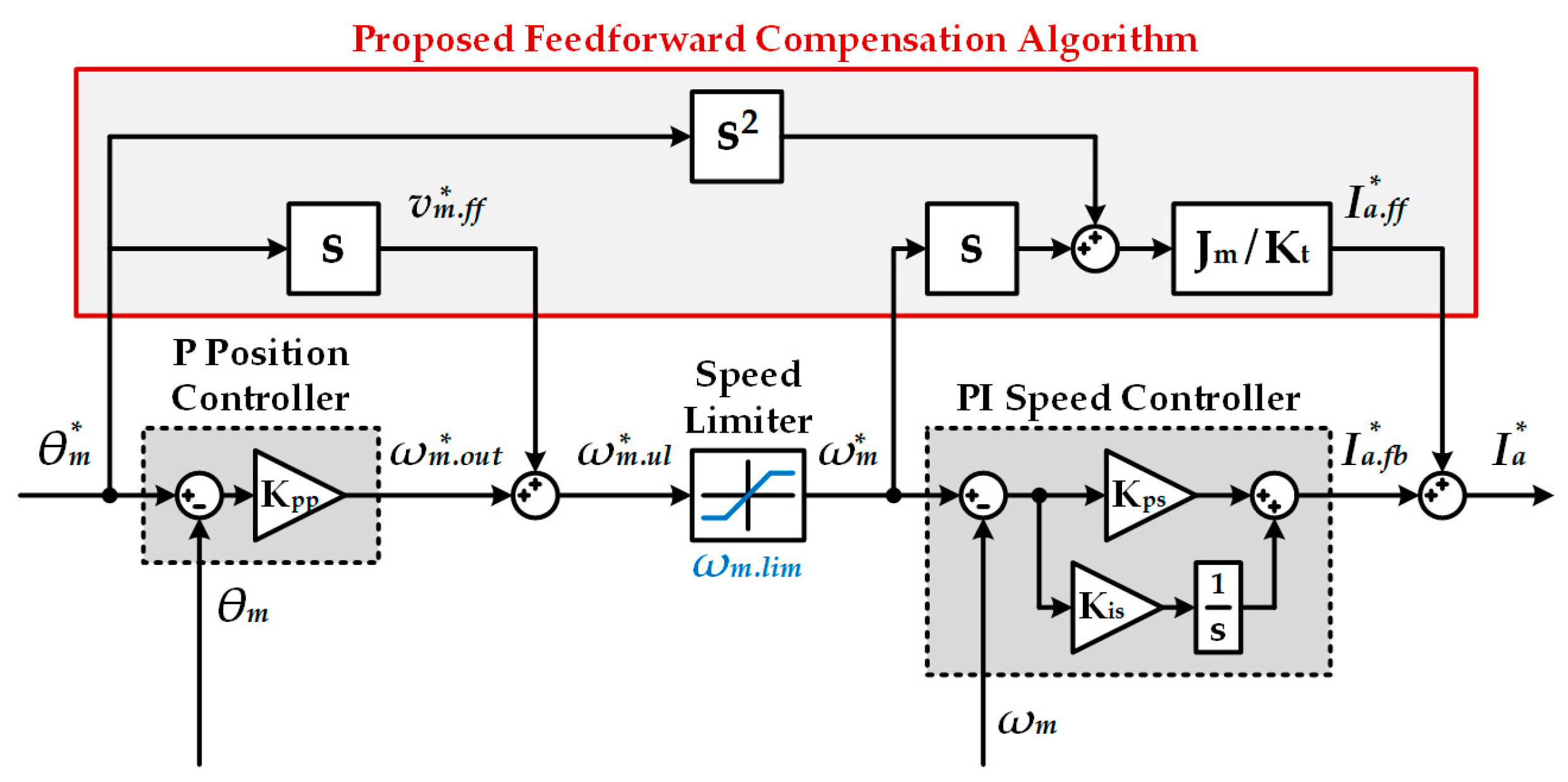
3. Proposed Position Control System
3.1. Feedforward Controller Based on Speed Command
3.2. Feedforward Controller Based on Position Command
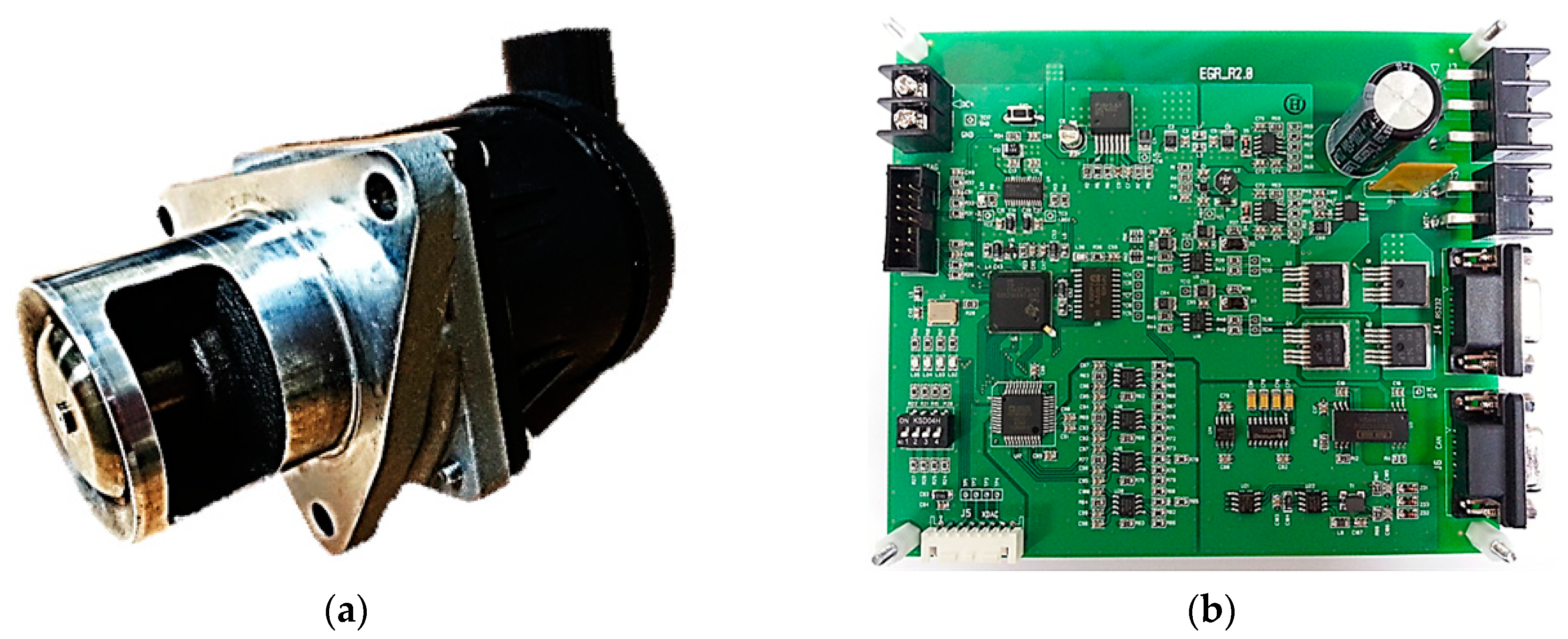
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, Y.; Park, T.; Jung, C.; Kim, C.H.; Kim, Y.W.; Lee, J.M. Hybrid nonlinear model predictive control of LNT and urealess SCR aftertreatment system. IEEE Trans. Control Syst. Technol. 2018, 27, 2305–2313. [Google Scholar] [CrossRef]
- Di Franco, C.; Elia, A.; Spagnolo, V.; Scamarcio, G.; Lugarà, P.M.; Ieva, E.; Cioffi, N.; Torsi, L.; Bruno, G.; Losurdo, M.; et al. Optical and electronic NOx sensors for applications in mechatronics. Sensors 2009, 9, 3337–3356. [Google Scholar] [CrossRef]
- Yoshioka, Y.; Kondo, H.; Tabata, Y.; Hatakenaka, H.; Nakada, K. Automatic control method of NO removal by a combination of ozone injection and exhaust gas recirculation. IEEE Trans. Ind. Appl. 2010, 46, 1166–1174. [Google Scholar] [CrossRef]
- Chen, P.; Wang, J. Observer-based estimation of air-fractions for a diesel engine coupled with aftertreatment systems. IEEE Trans. Control Syst. Technol. 2013, 21, 2239–2250. [Google Scholar] [CrossRef]
- Moos, R.; Reetmeyer, B.; Hürland, A.; Plog, C. Sensor for directly determining the exhaust gas recirculation rate—EGR sensor. Sens. Actuators B Chem. 2006, 119, 57–63. [Google Scholar] [CrossRef]
- Hiroyasu, T.; Nakayama, S.; Miki, M. Comparison study of SPEA2+, SPEA2, and NSGA-II in diesel engine emissions and fuel economy problem. In Proceedings of the IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005. [Google Scholar]
- Bhuiyan, H.; Lee, J.-H. Low cost position controller for exhaust gas recirculation valve system. Energies 2018, 11, 2171. [Google Scholar] [CrossRef] [Green Version]
- Gutfrind, C.; Dufour, L.; Liebart, V.; Vannier, J.C. An approach to the prototyping of an optimized limited stroke actuator to drive a low pressure exhaust gas recirculation valve. Sensors 2016, 16, 735. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fleming, W.J. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef]
- Manyala, J.O.; Fritz, T.; Atashbar, M.Z. Integration of triaxial hall-effect sensor technology for gear position sensing in commercial vehicle transmissions. IEEE Trans. Instrum. Meas. 2012, 61, 664–672. [Google Scholar] [CrossRef]
- Sun, J.; Kolmanovsky, J.; Cook, J.A.; Buckland, J.H. Modeling and control of automotive powertrain systems: A tutorial. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Ryu, H.-M.; Sul, S.-K. Position control for direct landing of elevator using time-based position pattern generation. In Proceedings of the IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No. 02CH37344), Pittsburgh, PA, USA, 13–18 October 2002. [Google Scholar]
- Sul, S.-K. 4.3 Speed regulator. In Control of Electric Machine Drive Systems; EI-Hawary, M.E., Ed.; Wily: Hoboken, NJ, USA, 2011; pp. 204–205. [Google Scholar]
- Heo, H.-J.; Son, Y.; Kim, J.-M. A trapezoidal velocity profile generator for position control using a feedback strategy. Energies 2019, 12, 1222. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.-S.; Choi, M.-S.; Kan, S. The unified gain tuning approach to the PID position control with minimal overshoot, position stiffness, and robustness to load variance for linear machine drives in machine tool environment. In Proceedings of the Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No. 01CH37181), Anaheim, CA, USA, 4–8 March 2001. [Google Scholar]
- Sul, S.-K. 4.4 Position regulator. In Control of Electric Machine Drive Systems; EI-Hawary, M.E., Ed.; Wily: Hoboken, NJ, USA, 2011; pp. 208–209. [Google Scholar]
- Lorenz, R.D.; Patten, K.W. High-resolution velocity estimation for all-digital, ac servo drives. IEEE Trans. Ind. Appl. 1991, 27, 701–705. [Google Scholar] [CrossRef]
- Schmidt, P.B.; Lorenz, R.D. Design principles and implementation of acceleration feedback to improve performance of dc drives. IEEE Trans. Ind. Appl. 1992, 28, 594–599. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Rated Power | 40 | W |
| Rated Speed | 75 | rad/s |
| Rated Current | 4 | A |
| Input Voltage | 12 | V |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-J.; Son, Y.-D.; Kim, J.-M. Improved Position Control for an EGR Valve System with Low Control Frequency. Energies 2020, 13, 457. https://doi.org/10.3390/en13020457
Kim H-J, Son Y-D, Kim J-M. Improved Position Control for an EGR Valve System with Low Control Frequency. Energies. 2020; 13(2):457. https://doi.org/10.3390/en13020457
Chicago/Turabian StyleKim, Hyeong-Jin, Yung-Deug Son, and Jang-Mok Kim. 2020. "Improved Position Control for an EGR Valve System with Low Control Frequency" Energies 13, no. 2: 457. https://doi.org/10.3390/en13020457
APA StyleKim, H.-J., Son, Y.-D., & Kim, J.-M. (2020). Improved Position Control for an EGR Valve System with Low Control Frequency. Energies, 13(2), 457. https://doi.org/10.3390/en13020457