1. Introduction
Rail is among the most efficient and lowest emission modes of transport. It is under constant pressure to increase the accessibility of connections and quality of passenger services to enhance their competitiveness with other transport modes. For rail to compete more effectively with other modes of transport and attract more passengers, it needs the next generation of passenger trains that will be lighter, more energy-efficient and cost-effective. Traditional passenger trains consisting of a locomotive and several carriages penalize performance in terms of acceleration since they have a limited number of available drive wheelsets. Modern electric multiple units (EMUs) do not require a locomotive, as they consist of several self-propelled units in a fixed assembly. Traction is distributed along the length of the train and the motors are housed by bogies of different carriages [
1]. The demand for EMUs used for local, regional and intercity transport, grows globally every year. Thanks to the use of common bogies for the central wagons, EMUs are shorter and lighter than trains pulled by locomotives. This translates into lower movement resistance, better acceleration and lower energy consumption [
2]. Moreover, EMUs better implement the specificity of passenger traffic and station service as they have a greater number of doors and provide better exchange of travelers.
Quantitatively, the most important part of energy drawn from the overhead traction line by an EMU is consumed by the traction propulsion systems. Traction drive is crucial for the EMU’s efficiency, reliability and availability. The on-board propulsion converters, which for years have been traditionally installed in separate technical compartments, are currently mounted on the roof [
3] or under the floor [
4,
5] of the EMU train. This corresponds to the growing requirements for the number of passenger seats due to the limited length of the passenger train.
The most common R&D works carried out by the manufacturers of traction drives are focused on improving efficiency and reducing the size of the on-board propulsion and power systems [
3,
4,
5,
6]. Another important topic is the reduction of noise emission [
3]. Noise from mechanical and electrical components is troublesome to the human ear and significantly reduces travel comfort. A noticeable source is the working traction motor, whose noise depends on the frequency of switching transistors and the control method used in the drive inverter [
7,
8].
In the case of a drive inverter for rolling stock for 3 kV DC traction, it would be difficult to find any significant changes in the construction and control technology in the last decades [
2,
9,
10]. The 3 kV dc-line voltage is a challenging task for power electronics. Due to a significant voltage drop on the overhead line, the traction power supply works at a higher voltage, usually 3.6 kV or even higher. This results in a requirement where the operation of a vehicle is often expected from 2.4 kV up to more than 4 kV, with the nominal power available from 2.8 kV or 3 kV DC [
9]. A power conversion chain operating under direct current catenary is reduced to a bulky input filter and a voltage source inverter (VSI). Nowadays, EMUs powered by 3 kV DC voltage are equipped with two-level VSIs constructed of six 6.5 kV insulated gate bipolar transistors (IGBTs) generating pulse width modulated (PWM) voltage for supplying medium voltage asynchronous traction motors.
A small number of EMUs are equipped with three-level neutral point clamped (NPC) VSIs using 3.3 kV IGBTs [
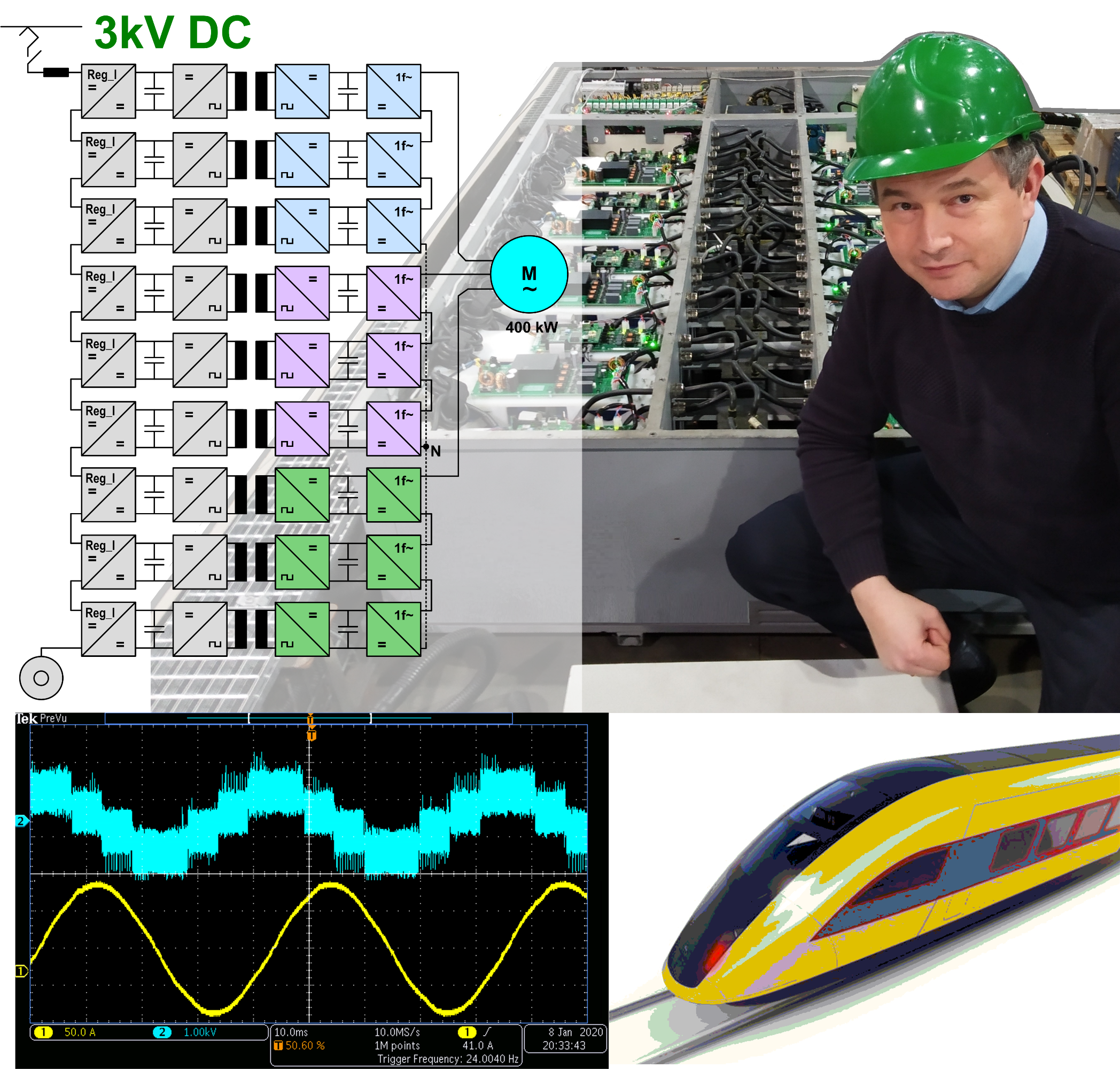
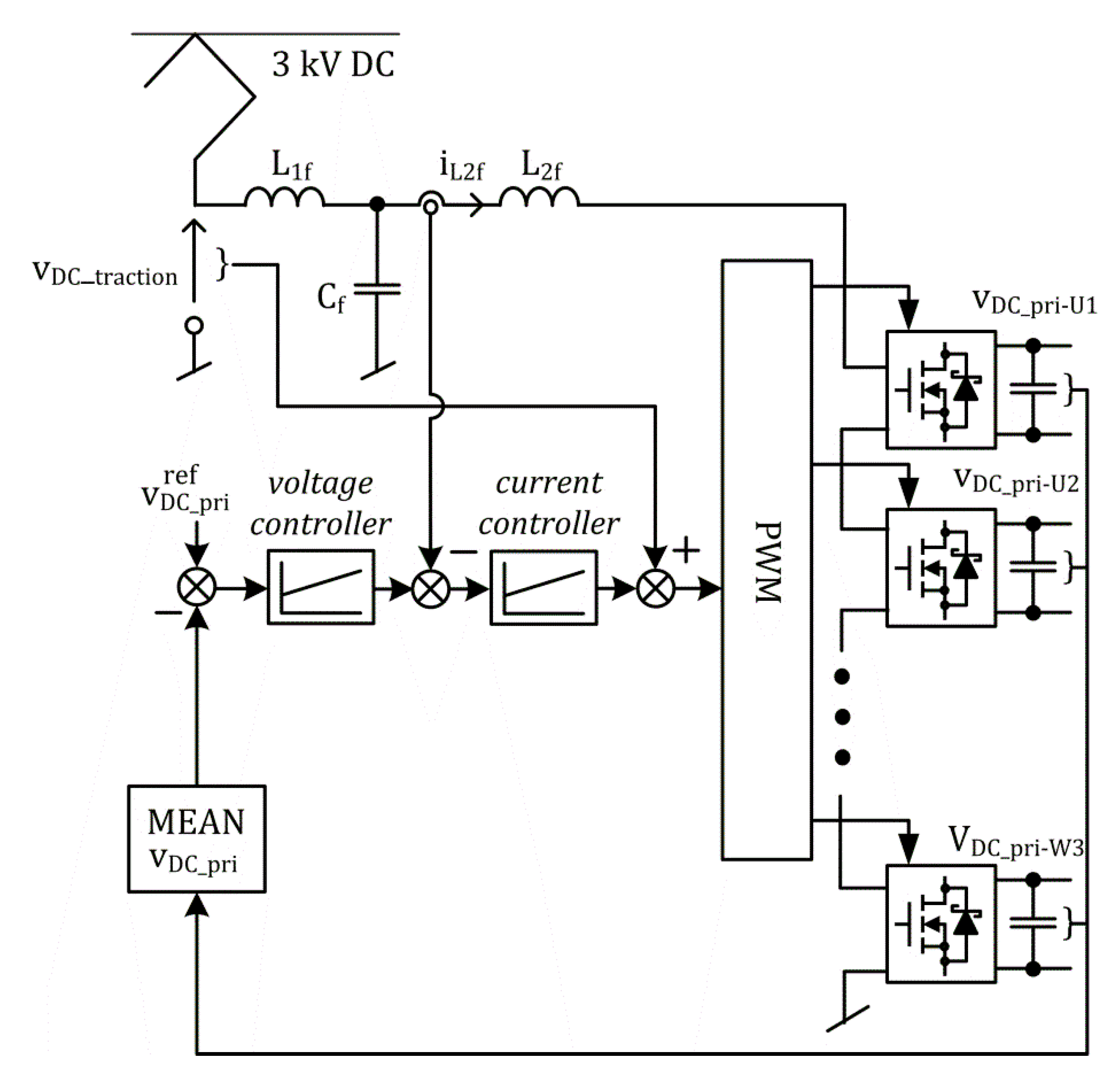
11]. A typical traction drive with a two-level VSI is shown in
Figure 1a. In such a system, the LC filter capacitor also takes on the role of energy storage and is cyclically charged and discharged with impulse currents. The line filter choke, which is the most massive element of the inverter and weighs several hundred kgs, serves to limit high frequency, high di/dt pulse currents flowing between the catenary and the traction vehicle when the capacitor is recharged.
The power supply of the inverter has a large impact on both noise and the electromagnetic and thermal properties of traction motors.
Table 1 shows the switching frequencies of HV IGBTs used in propulsion inverters for 3kV DC traction.
The harmonic voltages caused by PWM inverters operated with frequency ranging from individual hundreds of Hz to 2 kHz are the cause of significant current heat losses in the traction motor winding resistances [
7,
8]. The additional losses due to inverter supply can amount in the range of a few percent of the rated motor power and also occur in the laminated core of the traction motor. The winding and core losses most notably entail thermal problems, increasing the traction motor temperature by an average 30–50 K compared with a sinusoidal supply [
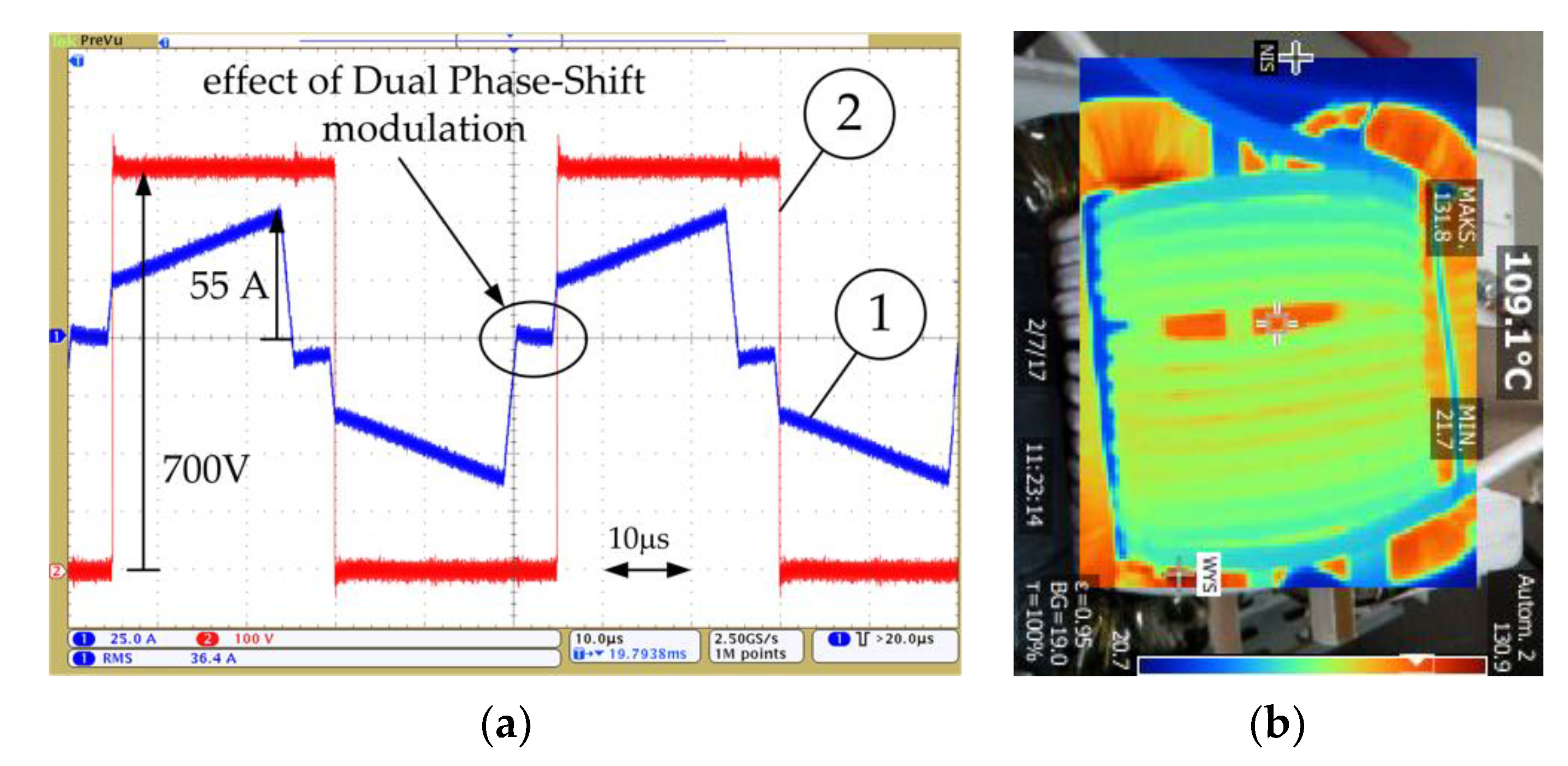
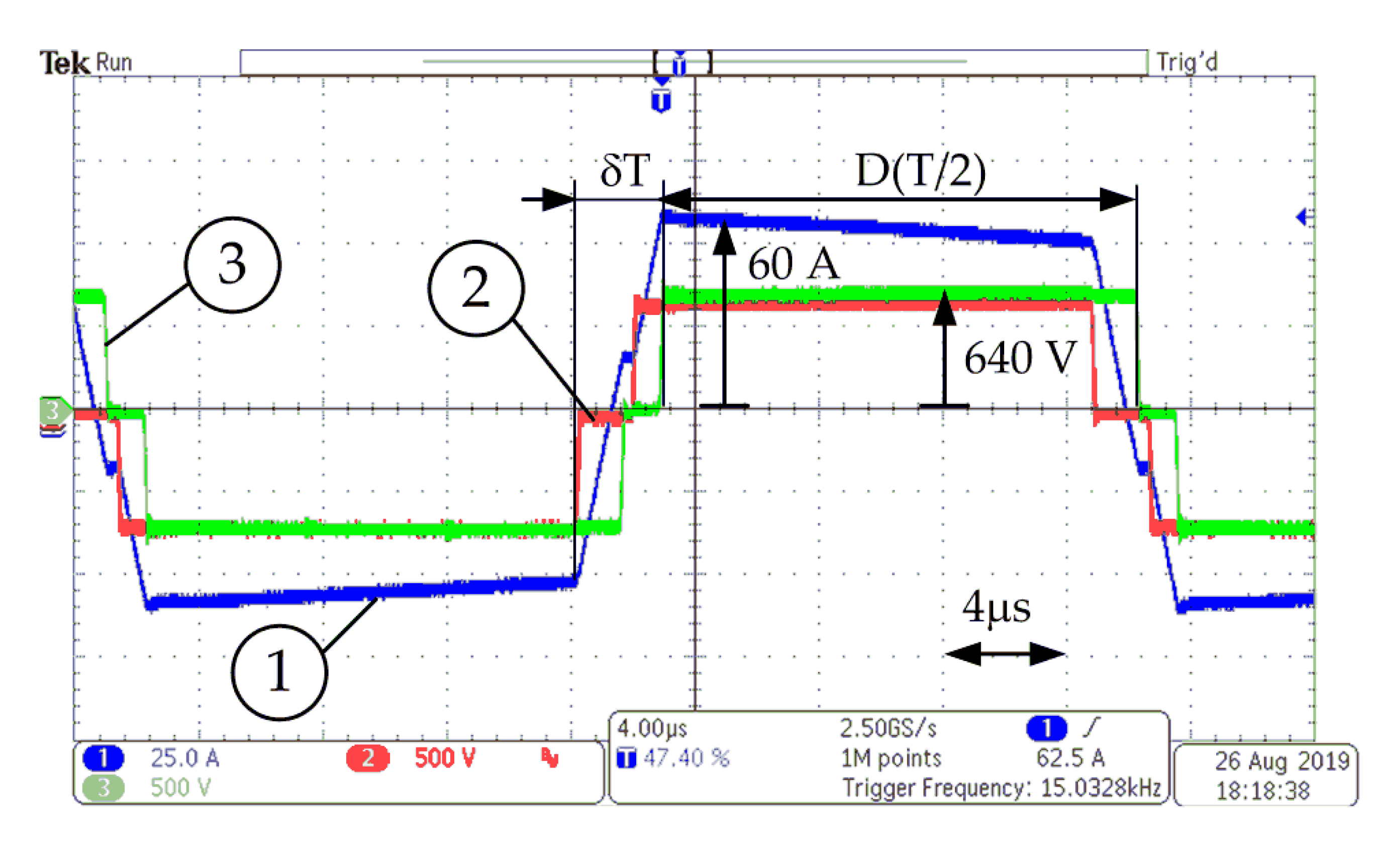
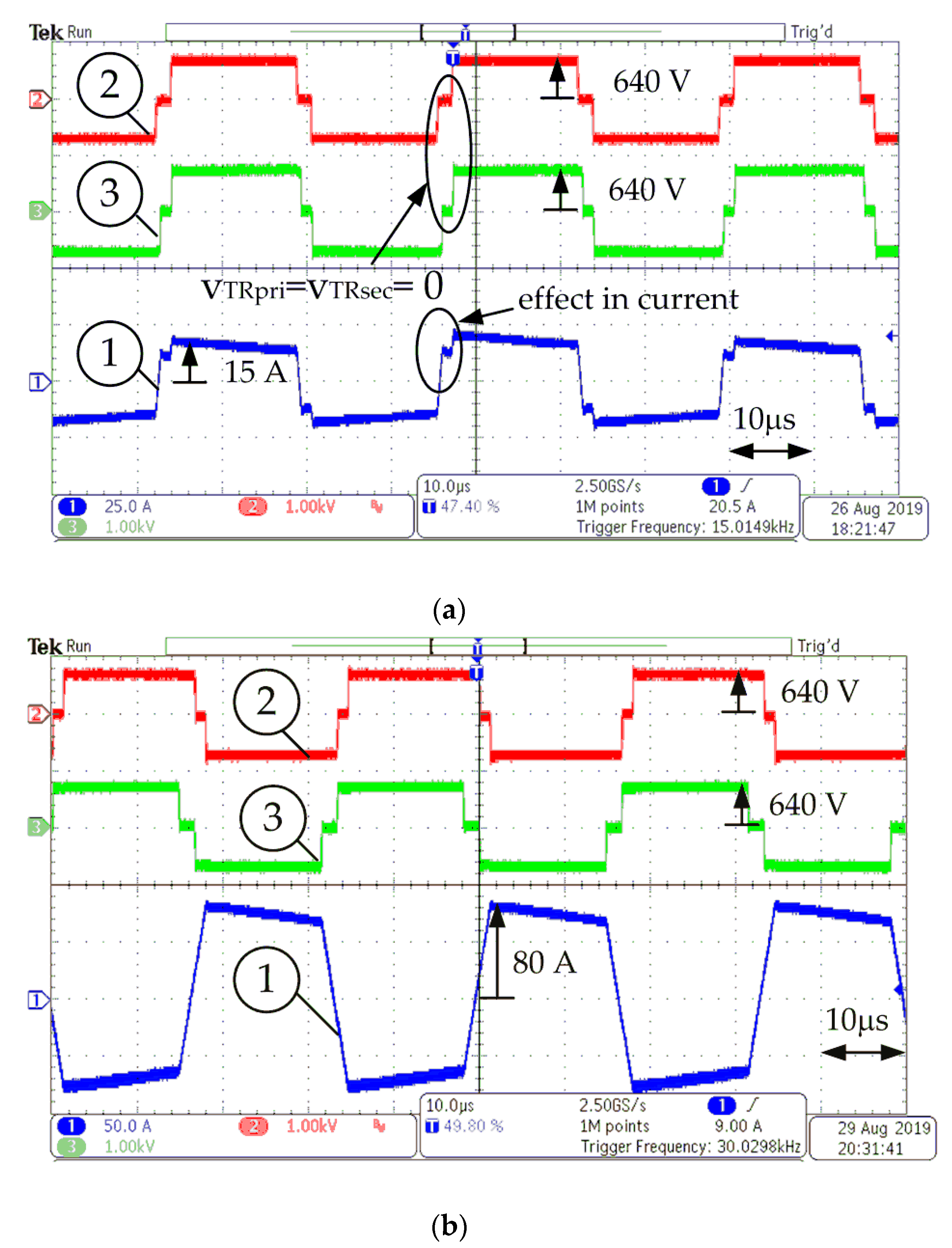
8], but also lead to reductions in efficiency. Moreover, the negative effects of the low frequency PWM operation of the inverter feeding the traction motor are increased mechanical loads and increased noise emission. Typical voltage and current transients during the switching of the 6.5 kV IGBT are shown in
Figure 1b. The main reason for low IGBT switching frequency are the relatively long switching times of the order of several microseconds and a characteristic current tail during turning off. The increase in the switching frequency of IGBTs would be at the expense of an unacceptable increase in the switching losses. Due to the above-mentioned reasons, current research and development conducted by manufacturers of the traction drives for rolling stock are focused on the utilization of new generation power transistors made of silicon carbide (SiC). Thanks to the exceptional properties, such as: significant achievable energy savings, quieter operation, improved reliability, and reduction in maintenance costs, SiC MOSFETs are ideal for traction power converters new designs instead IGBTs—which were in use in the rolling stock industry for decades [
3,
4,
5,
6,
10]. The most obvious benefit of SiC metal-oxide semiconductor field-effect transistors (MOSFETs) compared to IGBTs is a significant reduction in switching losses, up to 55%, and total power losses, up to 80% [
6].
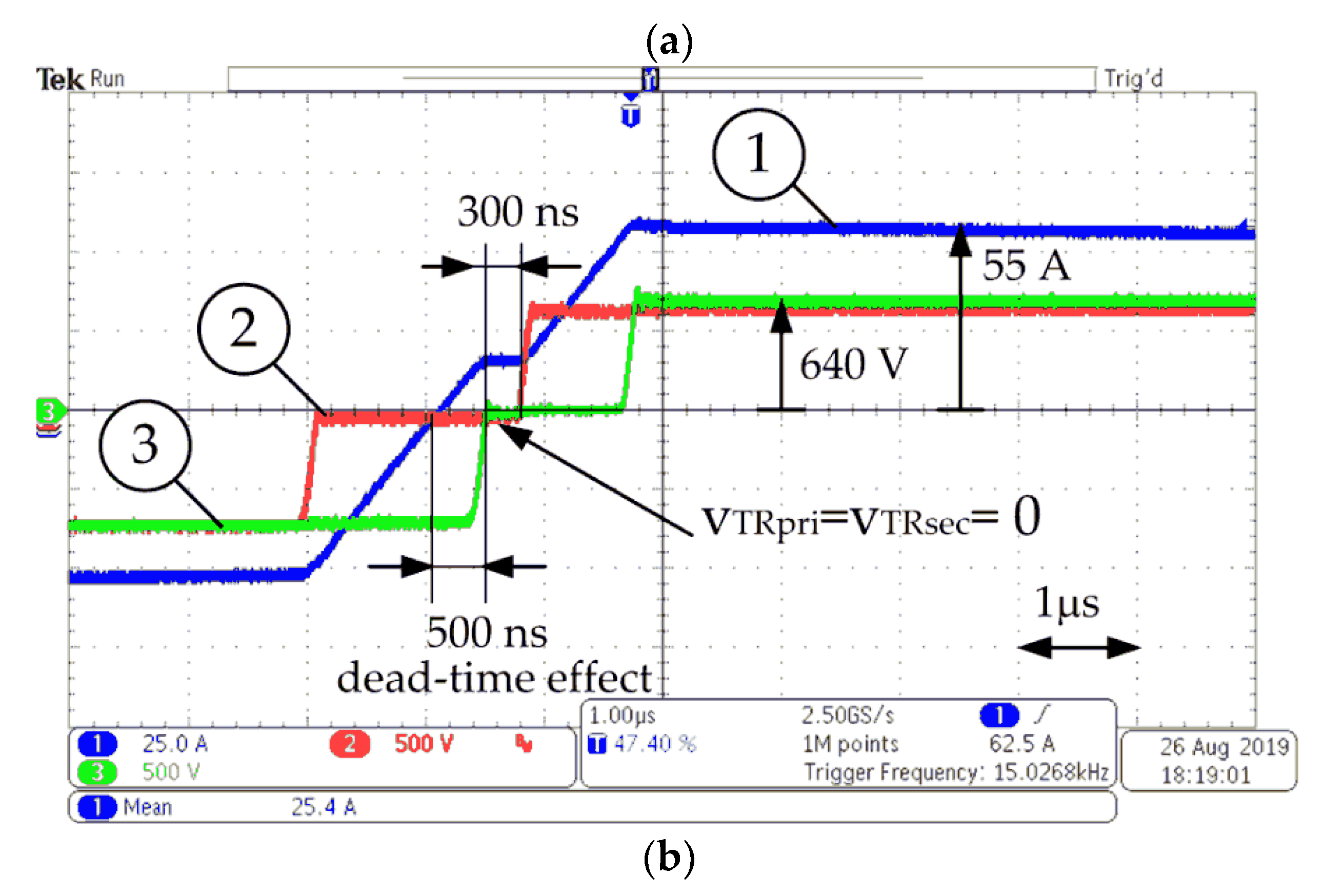
Typical voltage and current transients during switching of the 10 kV SiC MOSFET are shown in
Figure 1b. As it can be seen from
Figure 1, in the case of an SiC-MOSFET there is in principle no tail current, and so without this contribution, clearly the switching loss is extremely smaller.
Table 2 shows the overall losses distribution between the switching and conductive losses for HV SiC MOSFET and HV IGBT technology [
12].
The IGBT switching frequency is limited by the power dissipation, which increases the IGBT junction temperature. To preserve the reliability of operation, the total power dissipation density is limited at the value of 200 W/cm2 which maintains the chip temperature of 125 °C. The packaging technology further reduces the switching losses of the IGBT to 100 W/cm2, which is the reason for limiting the operating frequency of the 6.5 kV IGBT-based two-level inverters to below 1000 Hz.
Lower switching losses of HV SiC MOSFETs give the possibility of increasing the PWM frequency of the propulsion converters towards tens of kilohertz. This, in turn, makes it possible to reduce the size of passive components of the traction inverter-primarily the bulky traction line filter. The weight of the filter inductor for the conventional traction inverter shown in
Figure 1a is about 500 kg. The unique properties of SiC transistors allow to reduce the weight of the input filter inductor proportionally to the increase in the switching frequency. The issue supporting the reduction of dimensions of the input filter is the use of an additional high-efficiency active-front end (AFE) stage at the input of the traction inverter, which provides regulation of the current drawn from the grid. Due to the lower losses of SiC devices, the need for cooling is also substantially reduced [
5]. Reducing the size of the cooling system leads to a reduction in the volume, weight and costs of the entire traction drive [
6,
8,
9,
10].
The higher resolution of the PWM generation in SiC-based traction inverters has a positive effect on reducing harmonic losses of the traction motors-making the whole traction systems more efficient. As stated in [
4], the use of SiC power modules combined with expanding the control region outputting regeneration torque have made it possible to reduce the energy consumption rate of the railbound vehicle operated on suburban line by more than 37% compared to conventional systems. By increasing the PWM frequency above 20 kHz the acoustic noise level on the platform and in the cabin may be pushed beyond the audible range. In the case of railway inverters, the switching frequency of high voltage (3.3 kV and 10 kV) MOSFET SiC transistors is several kHz [
4,
5,
6]. In order to obtain noiseless operation of MV drives, multi-level topologies are used with the use of low-voltage (1.2 kV or 1.7 kV) SiC transistors. Among others, power electronic traction transformers (PETTs), built with power electronic building blocks (PEBB) with built-in input/output isolation, realized by small size and high power density medium frequency transformers (MFT) are of particular interest [
13,
14,
15,
16,
17,
18,
19].
So far, the primary purpose of SiC-based PETTs were primarily traction drives powered from the AC lines: 15 kV/16.7 Hz [
13,
14,
18,
19] and 25 kV/50 Hz [
15,
16,
17]. AC powered locomotives and EMUs have a complex and voluminous conversion chain including a step-down transformer, rectifier, low-frequency filter and traction inverter. Conventional line frequency transformers (LFTs) used in AC EMUs occupy up to 12% of the weight of rail vehicle and a corresponding part of the train space [
2]. Lightweight PETTs using MFTs, if they replaced bulky LFTs, could be easily installed on the roof, resulting in more space for passengers inside the train. AC PETTs offer not only a way to reduce the weight of the on-board electric equipment, but also to add additional functionalities and improve energy efficiency [
19].
Strictly speaking, the AC PETT replaces the system of an LFT and an active rectifier and the AC PETT topology does not include a propulsion inverter, which stays the same as in a classical propulsion system and is connected to DC output terminals of the PETT [
3,
13,
14,
15,
16,
17,
18,
19].
As it has been highlighted in [
13], the presently most promising medium frequency MF topologies for traction feature on their input-side a large number of series connected four-quadrant converters, with an overall switching frequency in the range of 5–8 kHz, modulated with Phase-Shifted PWM. The results presented in [
13] have shown that the use of a passively-damped LCL filter for the input-side results in a significantly lighter solution, compared to a single-pole type (single inductor) reported in most cases. The work [
14] shows the benefits of using the originally 15 kV/16.7 Hz-type PETT in a traction drive supplied from a 3kV DC network. The main innovation aspect of the PETT proposed in [
14] is the possibility to be operated with a HV-AC electric system, as well as after reconfiguration on a MV-DC catenary. A three-stage technology have been studied. Four-quadrant converters (4QC) connected in cascade and forming the PETT input stage provide, via insulated dual active bridge (DAB) DC-DC converters, voltage stabilization at the output DC terminals of the PETT, while limiting the ripple of current drawn from the DC traction network. Two solutions have been presented: the first solution using hard switching techniques, using a three-times silicon-conversion, and a second solution based on ZVT/ZCS switching of silicon semiconductor devices. The DC PETT described in [
14] provides a higher quality of drive operation during DC voltage disturbances which normally occur in 3 kV DC traction, than conventional propulsion systems with two-level and three-level inverters. Prototype modules have been realized with association of diodes and IGBTs in order to provide reverse-blocking devices. However, the concept was verified only on a small scale test rig. The works [
15] and [
16] present the method of optimal sizing of 25 kV/50 Hz-type PETTs using 3.3 kV SiC MOSFETs that leads to the best efficiency at rated power in a given volume. The authors emphasize that the efficiency cannot be the only parameter to make a clear choice of an isolated DC-DC converter included in a PETT. An important parameter should be also the acoustic noise, even if it is difficult to take it into account in preliminary studies. The results obtained in [
16] for 3.3 kV SiC MOSFET-based resonant DC-DC converters show that designing converters with a switching frequency in the range of 20 kHz would not lead to a dramatic reduction of the PETT efficiency. In [
19] the design and development of the 1.2 MVA medium voltage PETT prototype for 15 kV/16.7 Hz traction applications have been presented. The use of MFTs developed in [
19] allows for weight reduction and power density improvement (0.5–0.75 kVA/kg) compared to conventional traction chains (0.2–0.35 kVA/kg). The authors highlight the new possibilities in terms of management of the railway networks due improved power quality and grid compliance due to the multilevel input voltage waveform and high apparent switching frequency seen from the grid side. The application of PETT to 3 kV DC rail traction means that the entire modular converter operates at much lower maximum voltage than in the case of the AC PETT, which encourages the integration of the propulsion inverter within the structure of the DC PETT with the use of unified low-voltage cells. The use of low-voltage (1.2 kV or 1.7 kV) SiC devices for this purpose seems to be an excellent solution.
The presence of built-in galvanic isolation in low voltage cells, realized utilizing MFTs, allows for series connection of the cells on the catenary side to obtain DC rail traction voltage and, independently, the configuration of the output terminals of the cells as a three-phase medium voltage multi-level inverter on the traction motor side. However, the use of low voltage power devices and electronics in combination with high insulation requirements, imposed by the application to 3 kV DC rail traction, is a challenging research topic regarding the insulation strength of the cells, in particular SiC power devices and MFTs.
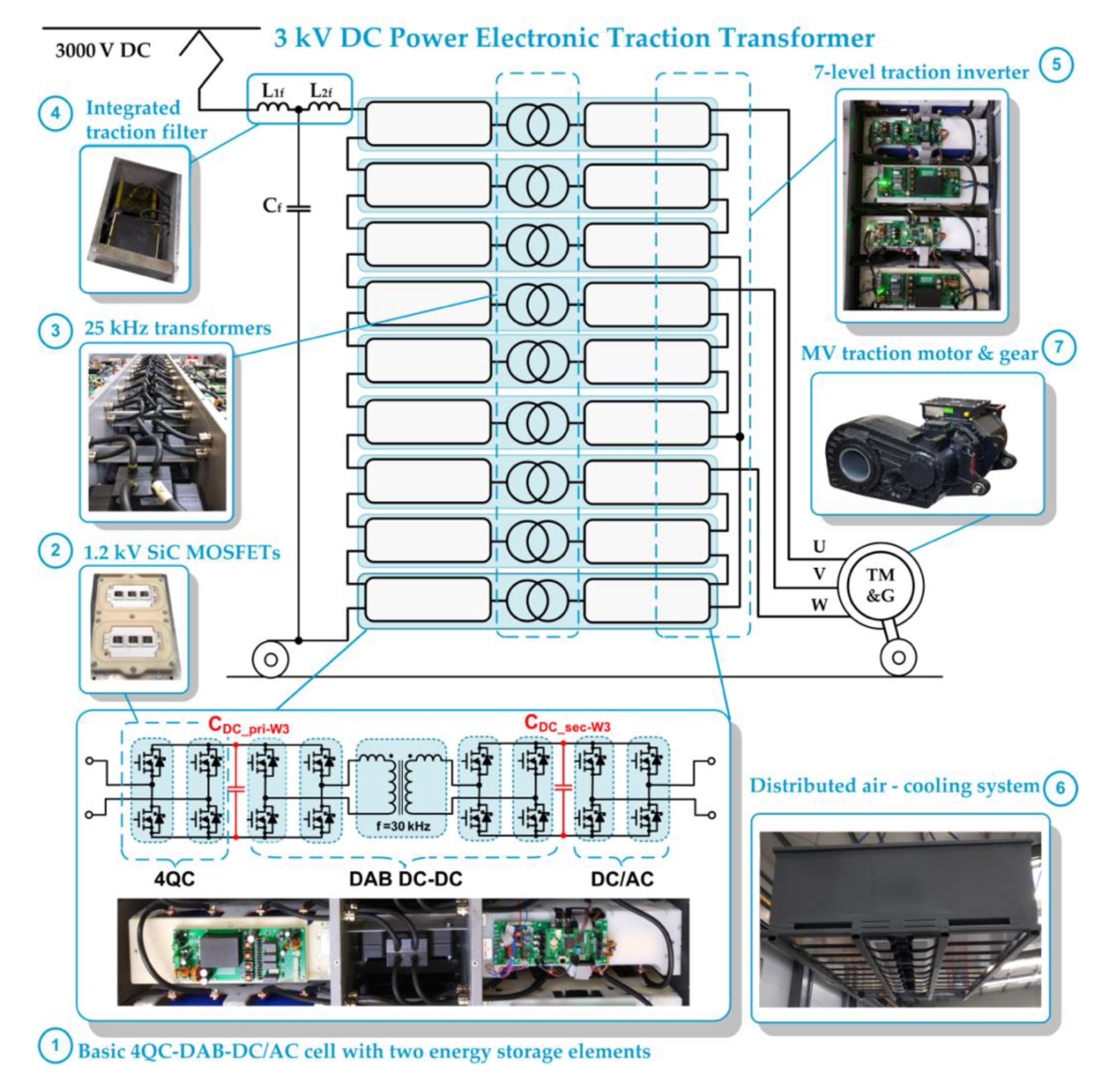
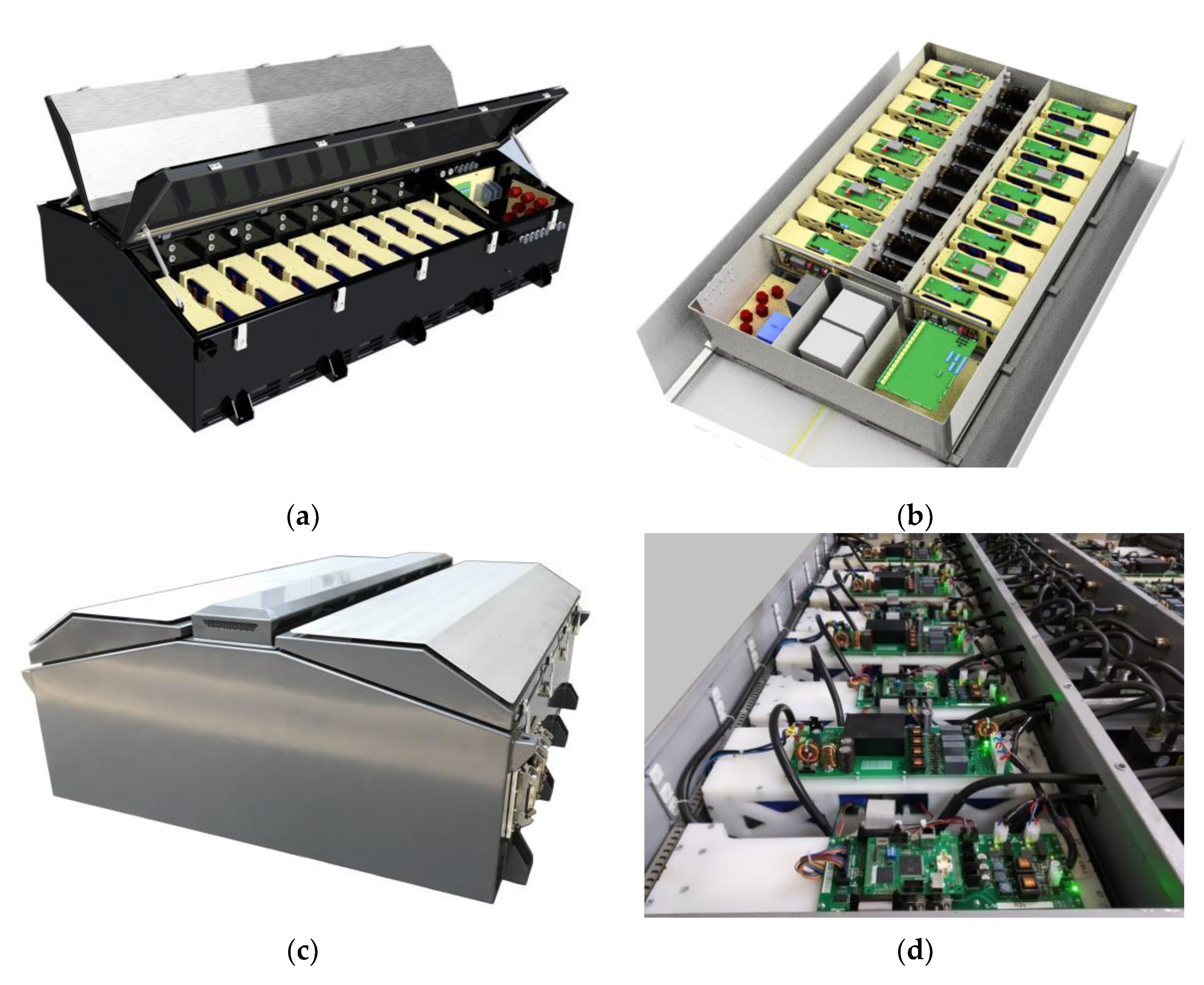
The world’s first and only traction unit equipped with the roof-mounted SiC-based 3 kV DC PETT is shown in
Figure 2. It is the PESA 308 EN81 series electric passenger railcar (construction number 308B-007) with an originally rated power of 560 kW that operates in Polish regional passenger rail transport since 2007. The work presented in this paper covers some of the recent research and development efforts to develop, design, test, commission, and install of the 335 kVA (500 kVA peak) SiC-based 3kV DC PETT on the PESA 308 test traction unit for a field trial.
2. Configuration of the 3 kV DC PETT Topology
The general description of the 3kV DC traction propulsion system with the SiC-based DC PETT is shown in
Figure 3.
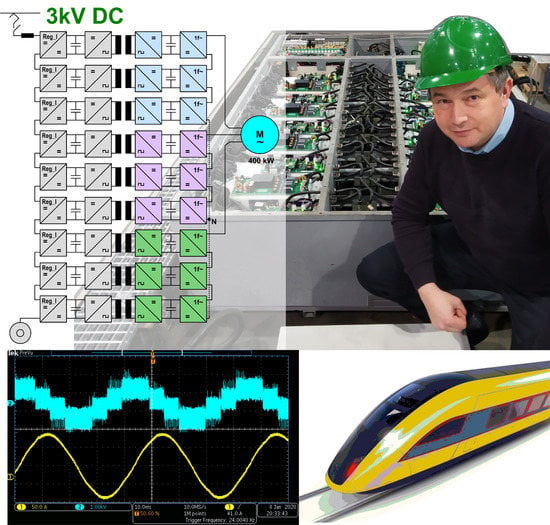
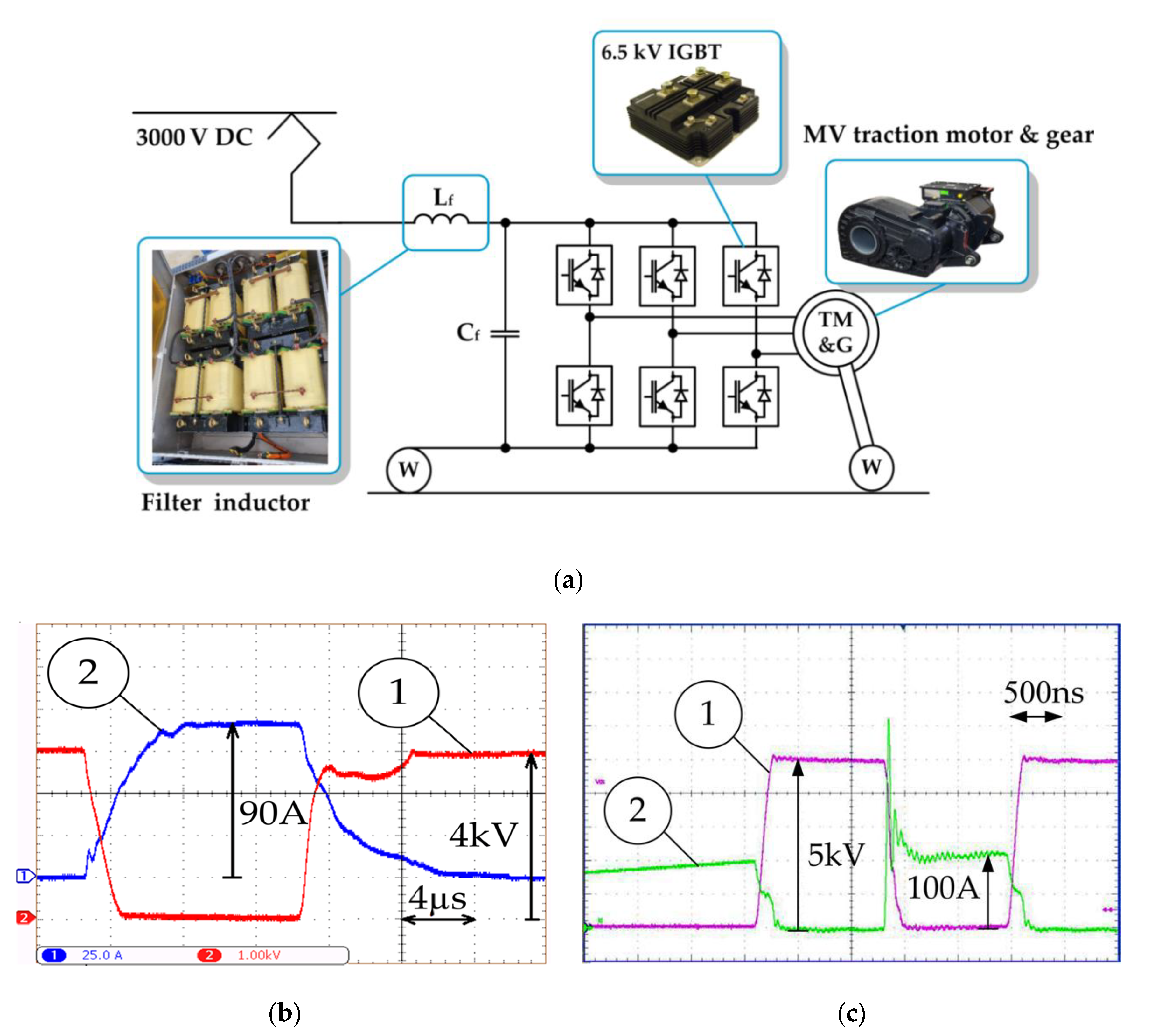
The key parts of the system include: nine power electronic cells (1) each consisting of eight commercially available 1.2 kV SiC MOSFET power modules (2) and medium frequency transformers (3) placed in separate air-cooled chambers; a compact input traction LCL filter of a small size has an area of a small chamber (4); a medium voltage asynchronous traction motor integrated with the gear unit (7). The DC PETT has, essentially, a three-stage construction: (1) DC input conversion stage; (2) AC output conversion stage and (3) AC-link, which is an especially designed medium frequency power transformer. The DC input conversion stage is used to adapt constant frequency DC traction voltage to a medium frequency required for conversion, while the AC output stage adapts medium frequency of the AC link to the output AC voltage useful for controlling the traction motor. The input terminals of the nine power electronic cells are connected in series which means that the DC PETT input stage is configured as a 19-level cascaded H-bridge four-quadrant converter (4QC) supporting the 3 kV DC railway traction network. The output terminals are connected in series, three pairs of terminals per phase, creating a three-phase output stage, which means that the traction motor is supplied by a three-phase seven-level cascaded H-bridge (CHB) traction inverter.
Table 3 lists the overall system requirements and specifications.
The proposed SiC-based DC PETT takes full advantage of the SiC technology while meeting the requirements of train manufacturers. During DC PETT operation, the energy drawn from the 3kV overhead contact line is processed in discrete portions, with full DC voltage divided into 19 levels, which helps meet stringent electromagnetic compatibility (EMC) standards, including EN 50121-2, EN 50121-3-1, EN 50121-3-2 and EN 50238. The use of a cascade system of series-connected 1.2kV SiC MOSFETs to switch the full voltage of the railway traction enables a much higher operating frequency of the power converter than using HV counterparts. At the same time, the selection of low-voltage transistors with high switching frequency can provide noiseless operation with comparable or even smaller total switching losses of the power converter [
19]. The internal terminals of the power electronic cells are configured as nine DAB DC-DC converters connected in series and forming the insulation stage of the DC PETT. Each of the nine 4QC-DAB-DC/AC power electronic cells assembled in this configuration is rated for 38 kVA (56 kVA peak). Each cell, in addition to the galvanic isolation realized with the MFT, contains two energy storage elements, which is a characteristic feature of PET devices and enables the independent implementation of various control tasks at the input and output of the device.
As the heat generation is concentrated around the MFTs and SiC power modules, a distributed air cooling system (6), when uses PWM controlled fans and eighteen cooling ducts is provided in order to deal with the heat. The use of low voltage SiC MOSFETs makes the construction of the DC PETT more competitive in price than two-level traction inverters using HV SiC MOSFETS due to very high costs of high voltage semiconductor power devices, high voltage capacitors and other high voltage electronic components. The price of CAS120M12BM2-type 1.2 kV/193 A SiC MOSFET power module starts at about $300, the price of CAB450M12XM3-type 1.2 kV/450 A SiC MOSFET starts at about $700, while for the 3.3 kV nHPD2-type SiC MOSFET modules prices start at about $9500. The 10 kV and 6.5 kV SiC MOSFET power modules are not available on the market yet.
The modular construction of the DC PETT ensures even weight distribution on the roof of the EMU train. The center of gravity of the device is distributed symmetrically on both sides of the longitudinal axis of the vehicle. The distribution of the basic cells of the PETT on the EMU roof surface is shown in
Figure 4. The operation of current-controlled nine-level four-quadrant converter connected to the 3 kV DC traction enables the minimization of the integrated input LCL traction filter and the mitigation of the resonances coming from the railway grid at a level that cannot be obtained in a conventional two-level inverter. As it can be seen from
Table 3, for the investigated EN81 railcar, the weight of the traction filter chokes was reduced by nearly 10 times.
Moreover, modular construction enables quick replacement of individual cells in case of failure. Therefore, the minimization of the MTTR (Mean Time to Repair), which is one of the basic indicators of reliability required in the railway industry [
20,
21] can be provided.
3. Low Voltage SiC Power Modules
According to numerous recent publications, e.g., [
20,
21], cascaded cells converter systems, such as the CHB topology, are a very attractive solution to interface power electronic systems to MVA-scale medium voltage applications. For the systems connected to medium voltage grids the choice of fast switching and low voltage drop 1.2 kV or 1.7 kV devices (giving up to 15 cells per phase stack) can be the most suitable trade-off between efficiency and power density, with efficiencies above 99% at a power density of about 5 kW/dm
3 [
22].
Higher switching frequency obtainable at lower blocking voltages allows to reduce loss and volume contributions of the grid filter inductances and the cooling system.
With the wide availability of low voltage SiC MOSFET power modules on the market their performance in the range of maximum working currents offered is constantly increasing along with the progressive heat dissipation capacity.
Figure 5 shows a comparison of the dimensions of the 1.2 kV SiC MOSFET power module, part no. CAS120M12BM2, used in this project, with a rated drain current of 138 A (T
C = 90 °C), R
DS(on) = 23 mΩ, junction to case thermal resistance R
thJC = 0.125 °C/W, maximum dissipated power P
D = 450 W (T
C = 90 °C) characterizing commutation circuit series inductance of 15nH and a base surface of 65.4 cm
2, and new generation 1.2 kV SiC MOSFET power module, part no. CAB450M12XM3, available on the market from mid-2019, with 3 times higher rated drain current I
D = 409 A (T
C = 90 °C), R
DS(on) = 4.6 mΩ, R
thJC = 0.11 °C/W, P
D = 750 W (T
C = 90 °C), and characterizing commutation circuit series inductance more than twice as low, L
stray = 6.7 nH and 36% less footprint.
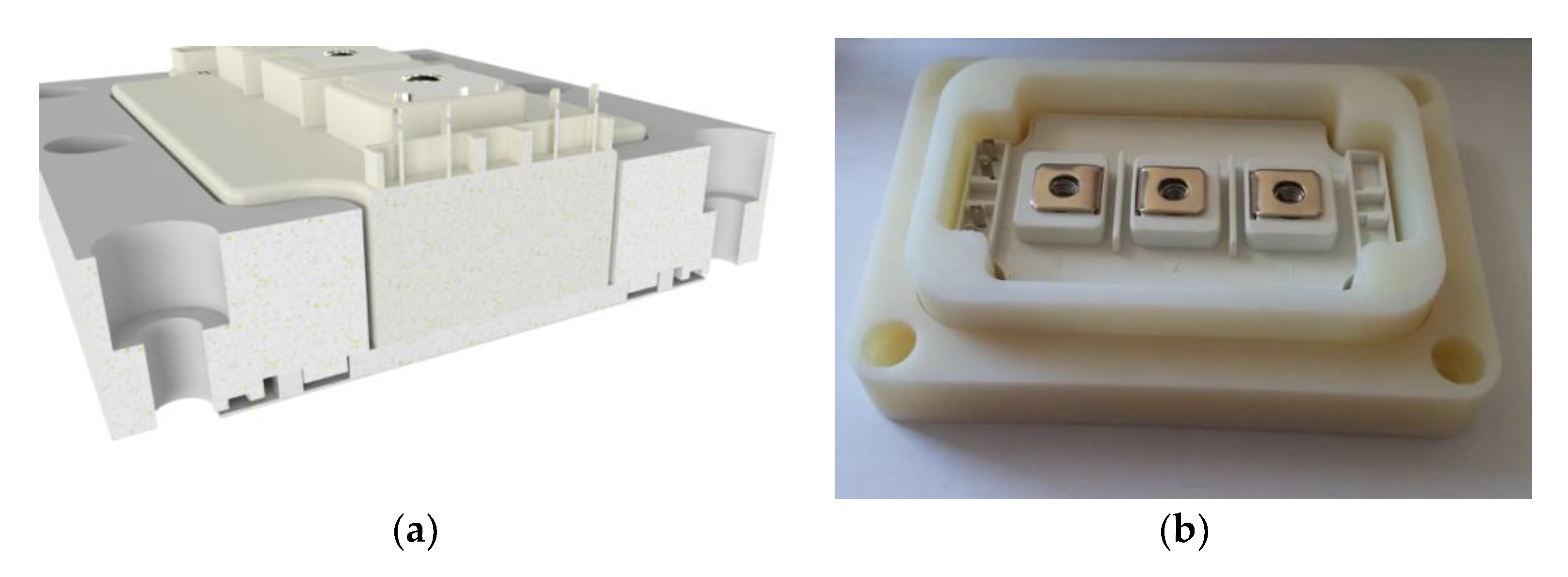
The use of SiC MOSFET 1.2 kV power modules in the design of the proposed 3 kV DC PETT requires higher insulation strength than the original housing offers to withstand the full operating voltage of the converter. To increase the voltage strength, an additional frame made of insulating material has been developed and mounted between each transistor module and the heat sink, which is shown in
Figure 6. A flexible, thermally conductive silicone film with thermal conductivity of 5 W/mK and a breakdown voltage of 9 kV AC was used between the base of the power modules and the heat sink.
There are several design challenges associated with switching performance of the SiC power modules which need to be carefully addressed including the minimization of ringing and overshoots caused by the parasitic loop inductance. These loop inductances together with SiC MOSFET output capacitance create a resonant tank, which is the source of unwanted EMI emissions [
23,
24]. To overcome the ringing, parasitic parameters converter should be minimized by a careful converter design.
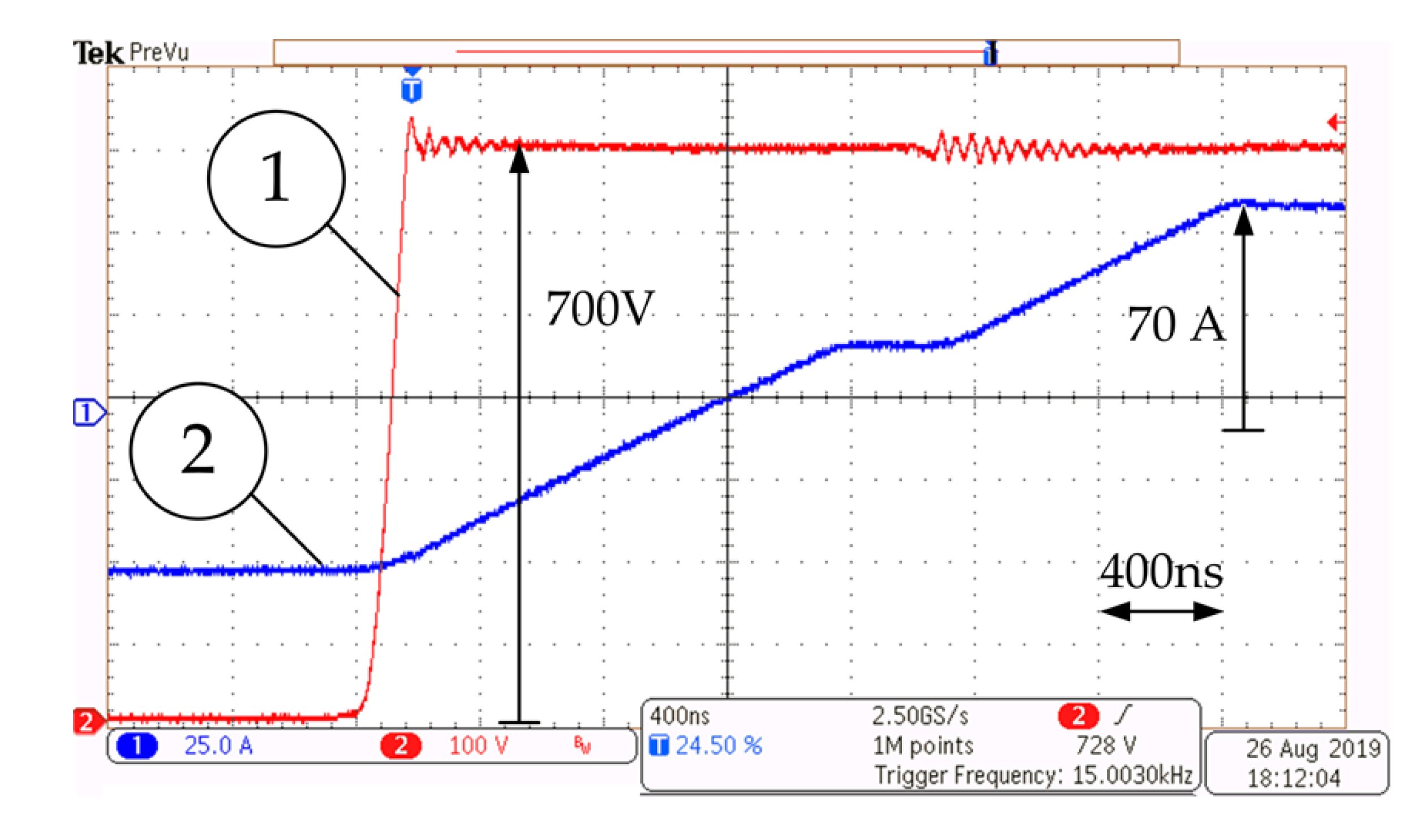
Figure 7 shows the drain-source voltage (U
DS) of the SiC MOSFET and the primary side transformer current of the developed DAB DC-DC converter measured in the developed SiC-based 3 kV DC PETT during commutation of 700 V DC voltage within 80 ns. A single standard PPA2124150-type, 1.5 uF snubber capacitor was attached to the DC bus of each SiC MOSFET power module. As can be seen in
Figure 7, thanks to the obtained minimization of the switching loop inductance the measured magnitude of the voltage ringing is about 40 V (5.7%), which is an acceptable level.
4. Design of MFT for 3kV DC PETT
The proposed 3kV DC PETT topology requires individual isolated DC-DC converters for the feeding of each H-bridge of the three-phase seven-level traction converter. The primary function is to provide galvanic insulation of each supply voltage [
17]. The isolation stage is ensured by nine DAB DC-DC converters [
25,
26,
27,
28,
29,
30,
31,
32], which, in the same time, are core elements of the entire system (
Figure 3). The main idea of the DC-DC DAB converter design is to combine the advantages of hard-switching pulse-width modulation (PWM) topologies characterizing a large dynamic range and no (reactive) circulating power operation and resonant topologies, which can operate in a soft-switching manner with a reduced electromagnetic interference (EMI) and effective utilization of transformer parasitics but, with strongly increased circulating power and a limited dynamic range.
The performance of DAB DC-DC converters and the entire DC PETT system is strongly affected by the design of the MFTs [
26]. The key element enabling each DAB DC-DC converter to transfer energy between input DC stage and output AC stage is the series inductance L
s, which acts as a decoupling element between the square-wave voltages and influences the conducted currents and switched currents of all the semiconductors of the active bridges of the DAB DC-DC converter. Series inductance can either be implemented as a separate component, using its own magnetic core, or can be built into the MFT. Using the MFT leakage inductance as the series inductance,
Ls =
Lσ, simplifies the mechanical design, eliminates the losses and volume resulting from the interconnection of the external inductor, and enables the achievement of higher power densities. However, in some justified cases, the use of additional auxiliary inductance may be unavoidable [
33].
The insulation between the primary and secondary side of the MFT must withstand the rated voltage of the DC railway overhead line. Achieving the desired MFT design that will maximize power density and efficiency while maintaining space and weight restrictions requires a complicated optimization procedure [
25]. Therefore the following considerations have been taken into account at the design stage:
Interleaving of windings was not considered in order to avoid voltage isolation problems,
The windings have been designed to provide very low coupling capacity between primary and secondary side to avoid capacitive coupling currents,
The coil-formers have been designed in order to implement the required leakage inductance Lσ, at the same time to comply with minimum clearance and creepage distances to the core and to maximize the cooling surface of the windings.
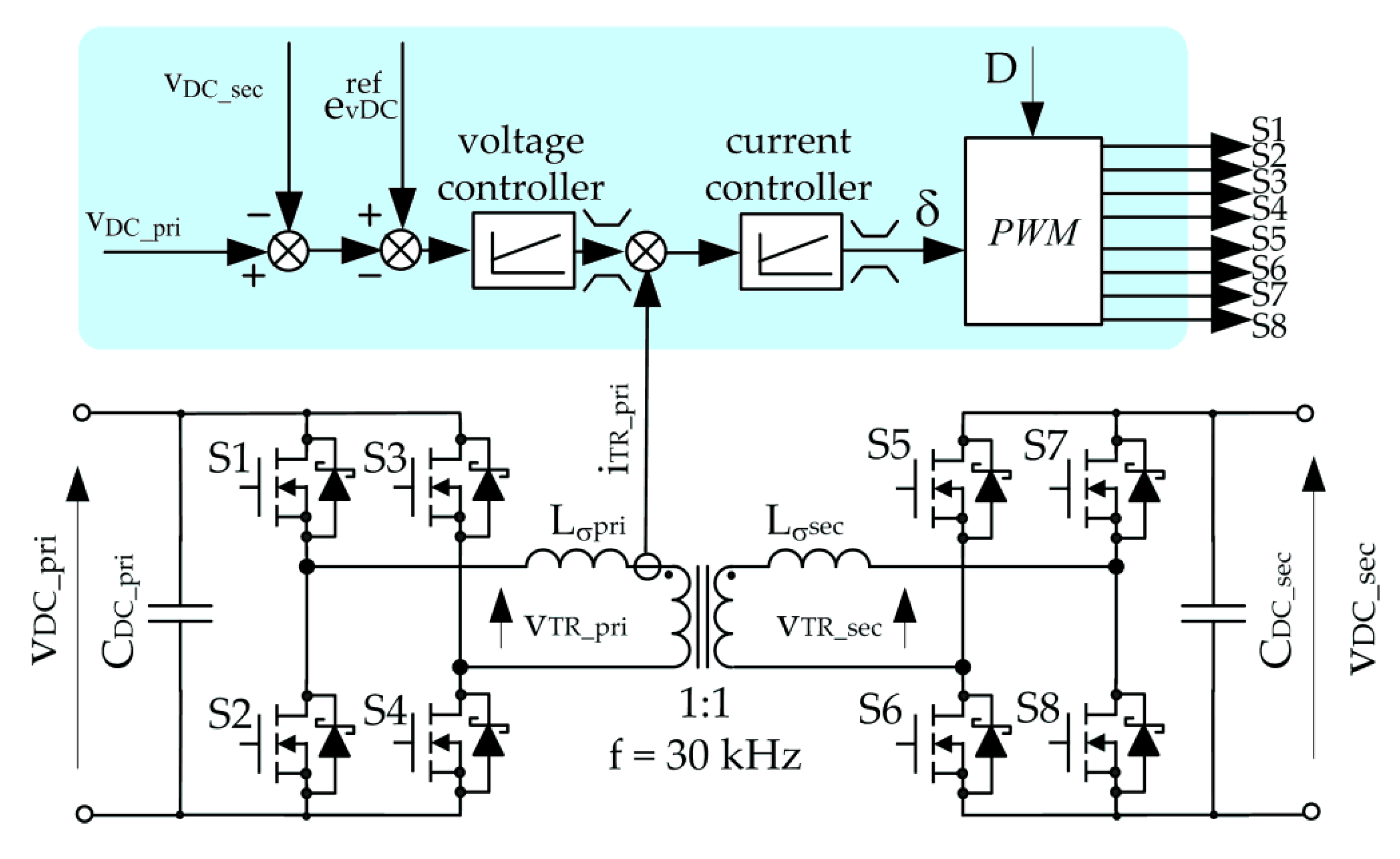
The working principle of the DAB DC-DC converter lies in the phase-shift δ, introduced between the rectangular AC voltages generated by the two active bridges [
26,
28]. The AC current flowing through the MFT is introduced by the phase shift of the active bridges AC voltages and depends on the difference of the primary and secondary DC voltages V
dc1 and V
dc2 and the value of the series inductance
Ls. For rectangular AC voltages characterizing the same duty cycle
D = 0.5, the transferred power
PDAB is adjusted by controlling the phase angle δ, according to the following formula:
where
Ls is the primary-referred leakage inductance [
26]. In principle, the designed transformer had to meet the thermal requirements and insulation distances required to achieve the desired leakage inductance. To design and manufacture of two prototype transformers, two types of magnetic material, i.e., amorphous material characterizing high saturation level and N87 ferrite core have been used. Both materials, amorphous and ferrite, are suitable for high power and high-frequency applications and it can be of interest to investigate their performance on two transformer prototypes.
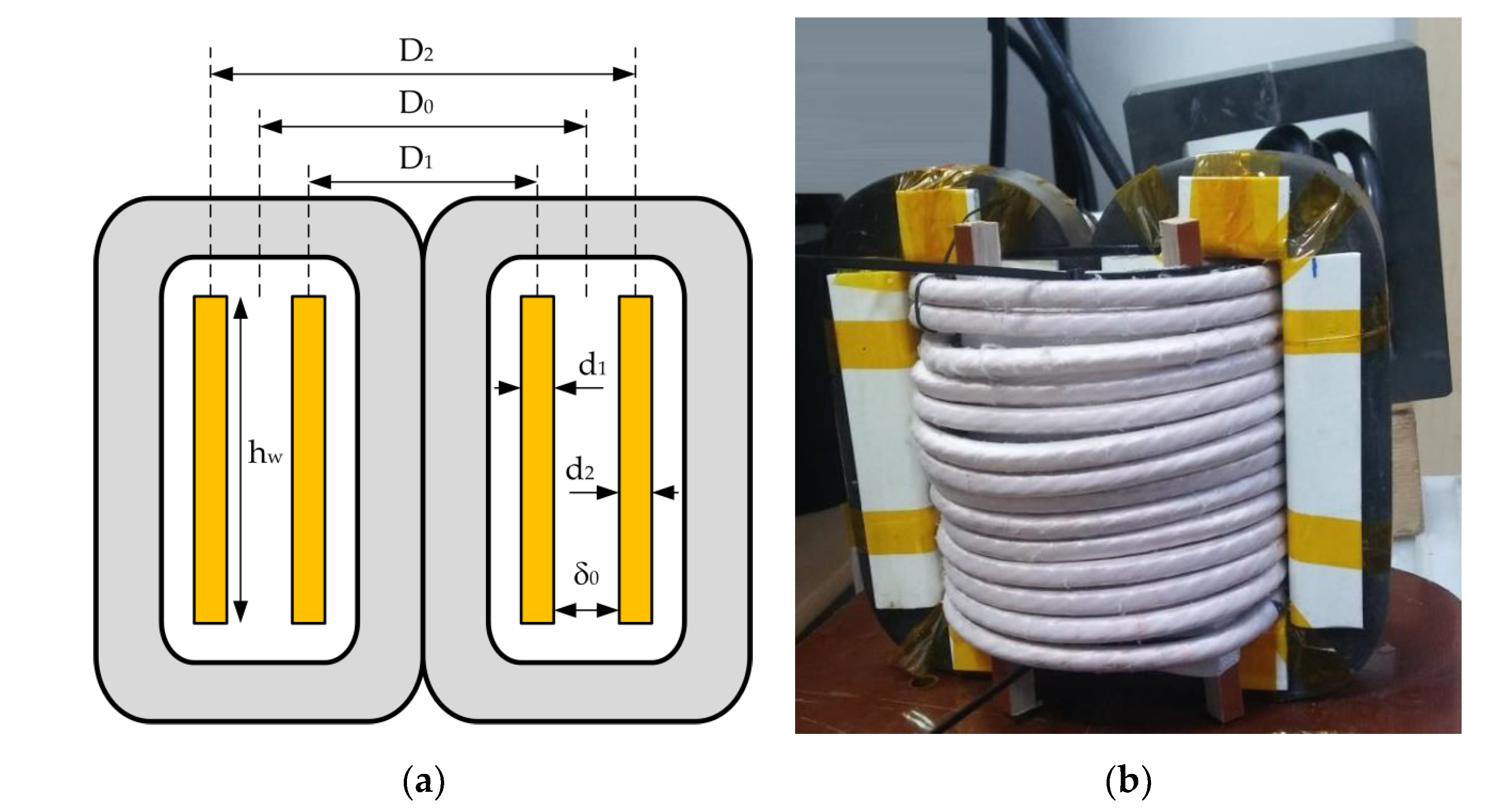
Figure 8 shows the dimensions of the windings and view of the first developed MFT prototype consisting of two high performance iron-based amorphous alloy (Fe-Cu-Nb-Si-B) wound cores with a rectangular shape (core length 222 mm, core width 118 mm, core height 30 mm, core build 35 mm). The classical shell-type structure with two uniform, concentric windings has been selected for the design. The leakage inductance has been set by arranging the position of the primary and secondary windings.
Uncut cores have been used, which can help reduce noise emissions from the transformer [
27] and are valuable for rail vehicles. Moreover, the absence of an interlayer impregnation, which can be found in cut cores, eliminates additional mechanical stress to the lamination. Both, the primary and secondary windings consist of 1400 × 0.2 mm Litz-wire with 14 turns. As can be seen from
Figure 8b, to facilitate the construction of the winding, plastic formers have been used. Since the magnetic core is uncut, an insulating tape was used to assemble the fragments of the former—so that they can be mounted around the central limb of the core.
The leakage inductance of two uniform, concentric windings, of equal height, for which the leakage field inside the windings can be assumed to be axial, can be determined from Rogowski approximation method [
34] using the mean length per turn for the whole arrangement of coils
lm:
where
µ0 = 4π × 10
−9 H/cm is the vacuum magnetic permeability,
NP is the number of turns in one winding,
d1 and
d2 are the radial sizes of internal and external windings, δ
0 is the width of the channel between the windings,
hw is the windings height and
kσ is Rogovskii’s coefficient:
or, alternatively, using the area of reduced leakage channel
SL:
The area of the reduced leakage channel for concentric windings from
Figure 8 can be calculated from [
34]:
where
D1 and
D2 are mean diameters of the primary and secondary winding and
D0 is mean diameter of the clearance ring between windings. Using
kσ, real concentric windings with height
hw are replaced by conditional windings of height
hw/kσ, which reach the yokes. This permits one to replace a real leakage field that is not convenient for calculations with an ideal one in which all field lines are parallel to the winding axis [
34]. For the developed prototype
NP = 14;
hw = 14.6 cm;
D1 = 9 cm;
D2 = 13.7 cm;
D0 = 11.4 cm;
d1 =
d2= 0.9 cm;
δ0 = 1.5 cm;
kσ = 0.92. Specifications of the first MFT prototype are listed in
Table 4.
The first MFT prototype from
Figure 8 has been operated with a DAB DC-DC converter. The dual phase-shift (DPS) control which uses the phase-shift between output voltages of the bridges along with the pulse width variation of both bridges output voltages has been applied to the DAB DC-DC converter. Although the applied DPS modulation helps to minimize the reactive power and thus maximize the active power transmitted by the DAB DC-DC converter, the desired output active power of 40 kW could not be achieved due to too low obtained leakage inductance of the prototype transformer of about 5.5 µH per side. Hence, two auxiliary series inductors of 5 µH have been added to increase the resultant series inductance value and keep the transformer running at rated power.
Thermal management to dissipate power losses is key to achieving high power density strongly required in the roof-mounted power electronic converters. During laboratory tests, particular attention was paid to the mechanism of formation of local temperature hot spots. In order to carry out transformer thermal measurements a thermal camera has been used to show the temperature distribution in the MFT.
Figure 9a shows experimental waveforms of the developed first prototype transformer operating at half rated power: primary current and the collector-emitter voltage of the SiC MOSFET of the DAB DC-DC converter operating with 20 kHz switching frequency and the DPS modulation while
Figure 9b describes the thermal characterization of the transformer operating without forced cooling at rated power of 40 kW. Excessive heating of the core was measured, which can be seen in
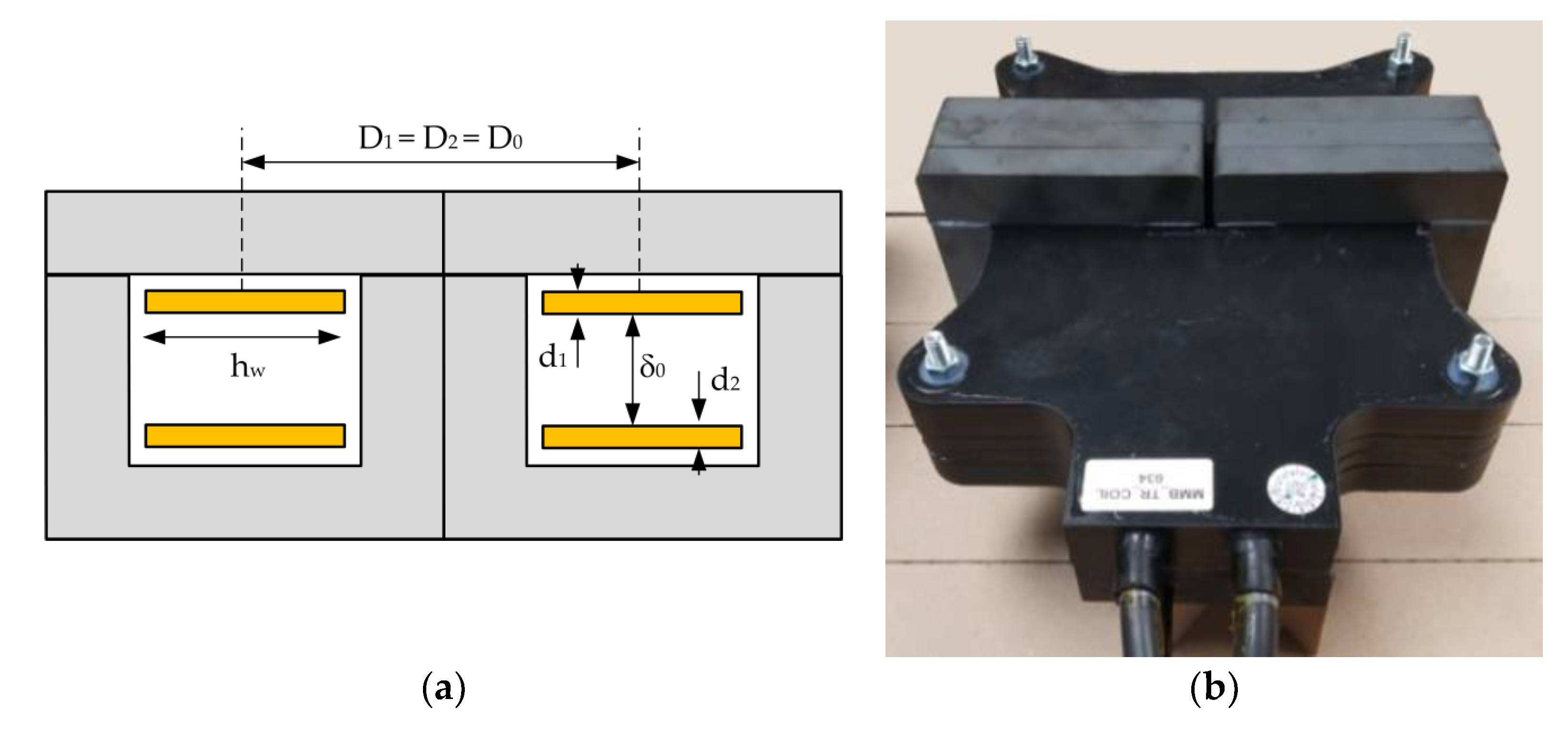
Figure 9b. Local temperature increase far above 100 °C was observed during the tests, even at partial load, which was associated with: local heat-up of the core and the proximity effect losses in the transformer windings. The used laminated amorphous cores are wound from a strip of material of several tenths of micrometric thickness. Local heating of the amorphous alloy core was observed in the strip-end area, which was attributed to eddy current losses due to normal flux components in the zone of the amorphous strip-end. On the other hand, the reason for the observed proximity effect in windings was the time-varying flux density field in a conductor caused by a current flowing in another conductor nearby. Non-uniform current density of a conductor section, caused by the proximity effect, leads to higher effective resistance which in turn increases winding losses and the total MFT losses and is directly responsible for the hot-spot temperature gradients. The hottest observed places of the first prototype transformer occurred around the middle limbs of the transformer core and in the center of the primary winding, inside of the leakage layer. The maximal temperature of windings exceeded 109 °C while the maximum measured temperature of the core reached 200 °C in the strip-end area. Additionally, a disadvantageous fact was that the presence of two additional auxiliary inductors has significantly increased the volume of the magnetic circuit of the DAB DC-DC converter. For the above reasons, an improved version of the MFT was produced with a split planar litz-wire windings placed coaxially one above the another in the disc arrangement. Split windings construction enables obtaining a higher leakage flux density and correspondingly higher leakage inductance compared to the cylindrical transformer with the same number of turns [
35]. In the disc type transformer the winding height
hw is measured in the direction of the core window width, while windings width
d1 and
d2 are in the direction of the core window height [
26], which is shown in
Figure 10. Therefore, the trapezoidal field distribution occurs in a direction perpendicular to the direction that occurred in the first prototype with the concentric windings. In the second prototype the N87 ferrite material with four times lower saturation level was used, which required increasing the core cross-section
Ac of the second prototype, according to the relationship below:
where
Vrms1 is the RMS value of the primary voltage,
kc is the filling factor of the core,
N1 is the number of primary turns, and
fs is the fundamental frequency. The coefficient
kf in Equation (6) depends on the duty cycle
D of the phase shift modulation of the DC-DC DAB converter:
To minimize the desired
Ac of the second MFT prototype, the switching frequency of the DC-DC DAB converter has been increased from 20 kHz to 30 kHz. Six pairs of U126/91/20 and I126/20 cores, i.e., three core stacks and litz wires comprised of 700 strands with a thickness of 0.2 mm have been used in the second MFT prototype. The effective surface of the used litz wires is 22 mm
2. The transformers were placed in separate chambers inside the DC PETT housing and are cooled by air blown by fans. The used forced cooling enables the maximum permissible current density of 4 A/mm
2 [
26] and the windings of the second prototype can carry a maximum current of 88 A. The used planar winding technology enables to adjust the leakage inductance of the transformer very precisely and reproducibly by using insulation distances between the primary and secondary windings.
The application of standard U-type and I-type ferrite core profiles for the core construction enables the use of prefabricated windings and supporting trays made of insulation material. To achieve isolation level of 9 kV, which is two times of the maximum DC-rail traction voltage level, casting the windings by the epoxy resin has been applied. The primary and secondary coils of the second prototype have the same height
hw, measured in the direction of the core window width. Hence it fulfils the precondition for the application of the method of Rogowski (Equation (2)) for prediction of leakage inductance [
36]. Specifications of the second MFT prototype are listed in
Table 5.
Figure 10 shows the dimensions of the windings and view of the first developed MFT prototype.
The windings were cast with a resin of good thermal conductivity and high mechanical strength, thanks to which the transformer can be placed in the so-called dirty area of the DC PETT housing. The final volume of the whole transformer is:
With a power density of 3.5 kW/dm
3 (≈5 kW/dm
3 peak). In order to carry out transformer thermal measurements a thermal camera has been used to determine the core and winding temperature distribution. The transformer has been running for 2 h at rated load.
Figure 11 describes the thermal characterization of the transformer operating at a power of 45 kW without forced cooling.
In of the second MFT prototype, with the split windings, the dimension of both the primary and the secondary windings are equal, which provides presenting equal dc resistances, while in the first prototype with the concentric windings the length difference between interior and exterior windings was considerable. The realized 30 kHz MFT prototype has been successfully tested at various operating conditions in a full power rated DAB DC-DC converter, which will be presented in detail in
Section 5.3.
6. On-Track Testing
The developed DC PETT prototype for the railway applications has been assembled as shown in
Figure 4 in
Section 2. Due to the direct availability of the 3 kV DC railway network on the railway siding, a number of experiments were conducted with the developed DC PETT prototype mounted on the roof of the EN81 series electric passenger railcar shown in
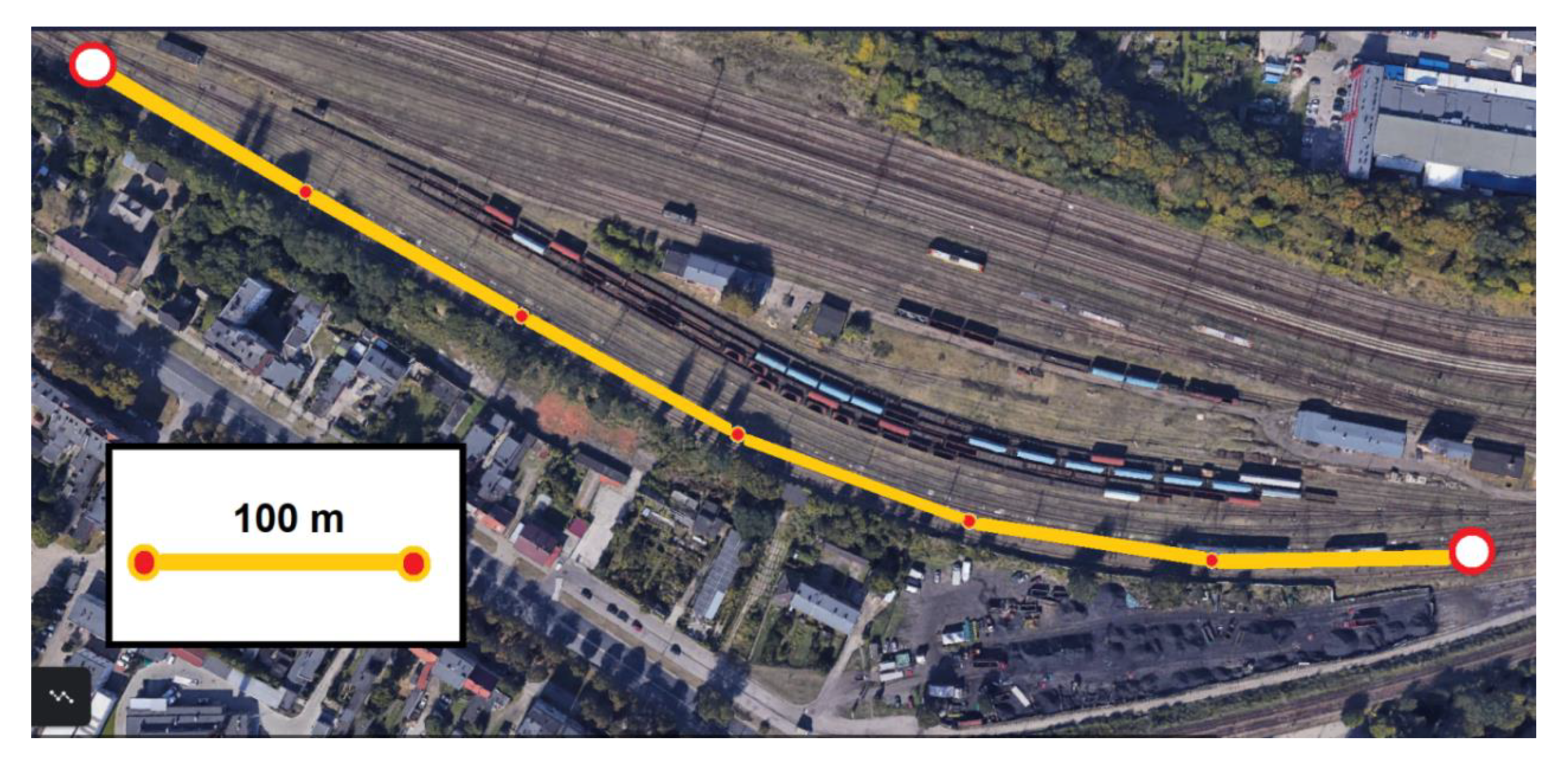
Figure 2 in the introductory section. During the tests, only one drive set of the traction motor powered by the developed 3kV DC PETT was running, which made it possible to obtain measurement results specifically for one complete drive system. The second traction motor of the EN81 series electric passenger railcar was not running during the tests. Due to the limitation of the track length, the maximum achievable speed during the experiments was, however, limited and did not reach the operating speed of 120 km/h given by the manufacturer of the rail vehicle. The route of the test runs with a length of 600 m on the Bydgoszcz-Towarowa railway siding used during on-track testing is shown in
Figure 19.
Specifications of the DKLBZ 0910-04 type traction motor of the EN81 series electric passenger railcar are listed in
Table 6.
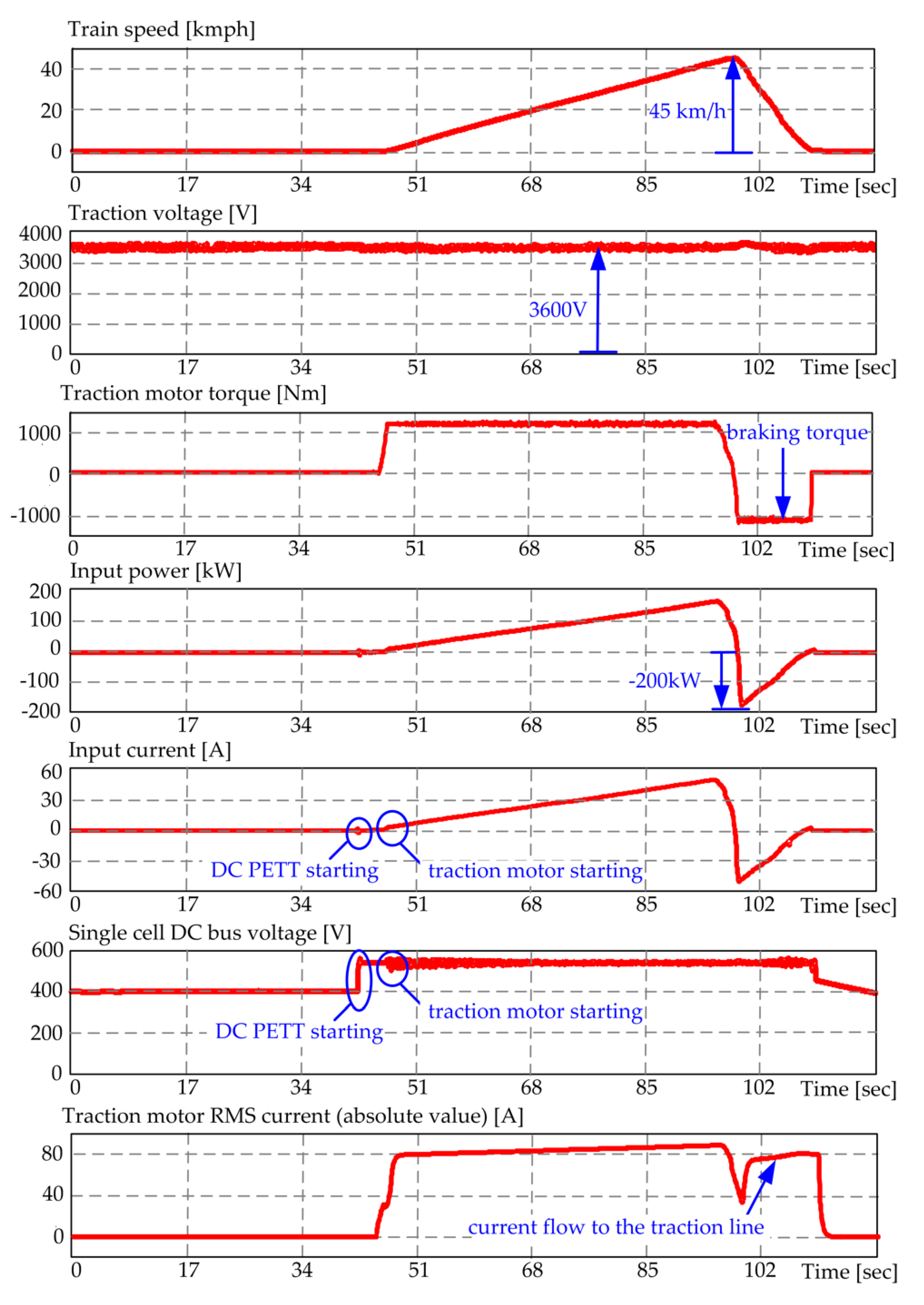
The results of the track test run on 600 m railway siding are shown in
Figure 20. The recorded waveforms were saved on a PC connected to the DSP-based MASTER controller card via USB.
Figure 20 illustrates recorded waveforms during accelerating of the train with the DC PETT based asynchronous traction drive to the speed of 45 km/h and immediate braking. Before the connection of the DC PETT to the overhead traction line voltage there is no energy stored in the DC PETT and all DC links are empty. Similar to AC PETT reported in [
19], initial charging is performed from the DC side utilizing the startup resistor that is bypassed later on. Moreover, the developed DC PETT has a second mode of pre-charging the intermediary circuits from the on-board battery bank using a set of DC-DC converters. The latter mode enables the DC PETT to be connected to the overhead traction line without any inrush current.
Referring to
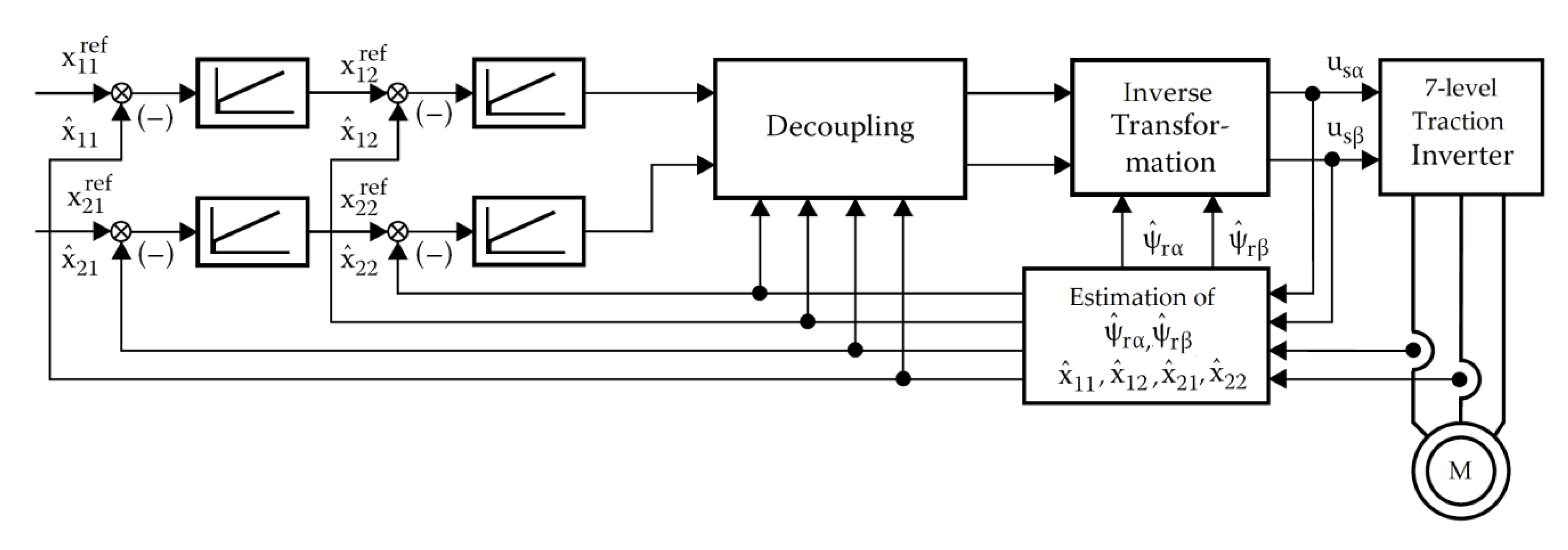
Figure 20, after the train pantograph is on, the uncontrolled voltage on each of the primary DC links equals the overhead line voltage divided by nine. Then, after starting DC PETT, the primary DC-link voltage is controlled to 520 V and the secondary DC-link voltage is controlled to be equal primary DC-link voltage. During DC PETT operation the input current drawn from the overhead traction line is controlled according to the control scheme shown in
Figure 14. In all experiments, the power recovered during braking was transferred back to the traction network. As can be seen from
Figure 20, the delivery of braking power of the order of 200 kW to the traction network did not significantly change the voltage of the traction network.
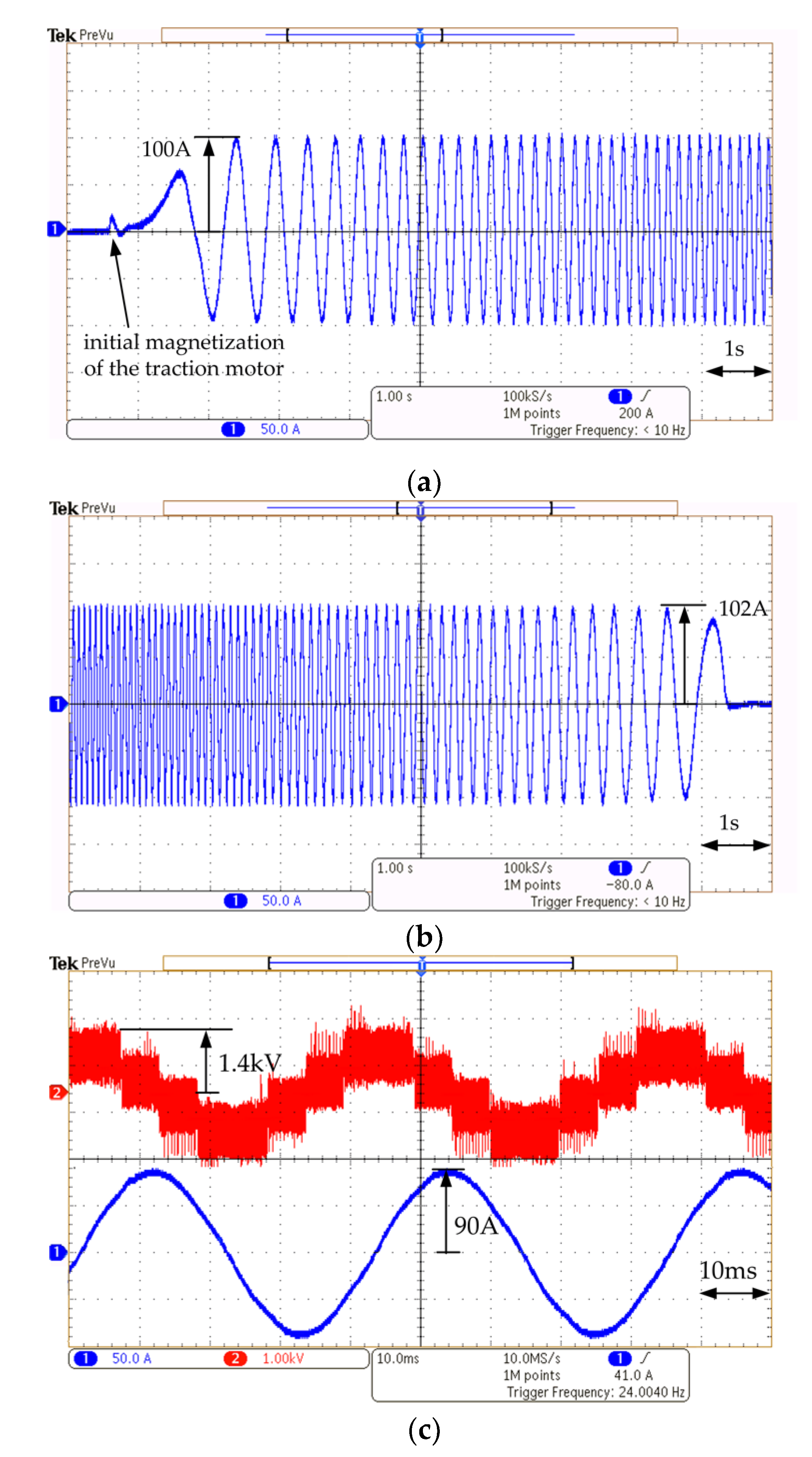
Figure 21 shows the characteristic traction motor stator current and the PWM output voltage waveforms obtained during three different operation modes of the DC PETT.
Figure 21a shows the stator current waveform during start-up and the acceleration of the traction motor (50 A/div; 1 s/div). Thanks to the use of high-performance torque control, mentioned in
Section 5, the stator current magnitude is limited at the desired value and its amplitude does not exceed 100 A at all times.
As can be seen, there are no undesirable oscillations in the current waveform.
Figure 21b shows the stator current waveform during the final braking phase of the train from 15 km/h until the train stops (50 A/div; 1 s/div).
Figure 21c shows the stator current and the PWM voltage at the DC PETT output in the steady-state operation of the traction motor (50 A/div; 1 kV/div; 10 ms/div). As it is shown in
Figure 21c, the applied three-phase, seven-level CHB topology provides an almost sinusoidal PWM voltage, which has not been demonstrated in any other 3kV DC rail traction inverter so far. By using CHB technology, the instantaneous maximum value of the voltage switched by the SiC MOSFET transistors does not exceed a few hundred volts. At high switching speeds of SiC MOSFET transistors, this will significantly facilitate compliance with the stringent requirements of railway electromagnetic compatibility (EMC) standards, which will be the focus of the planned continuation of the work carried out by the authors.
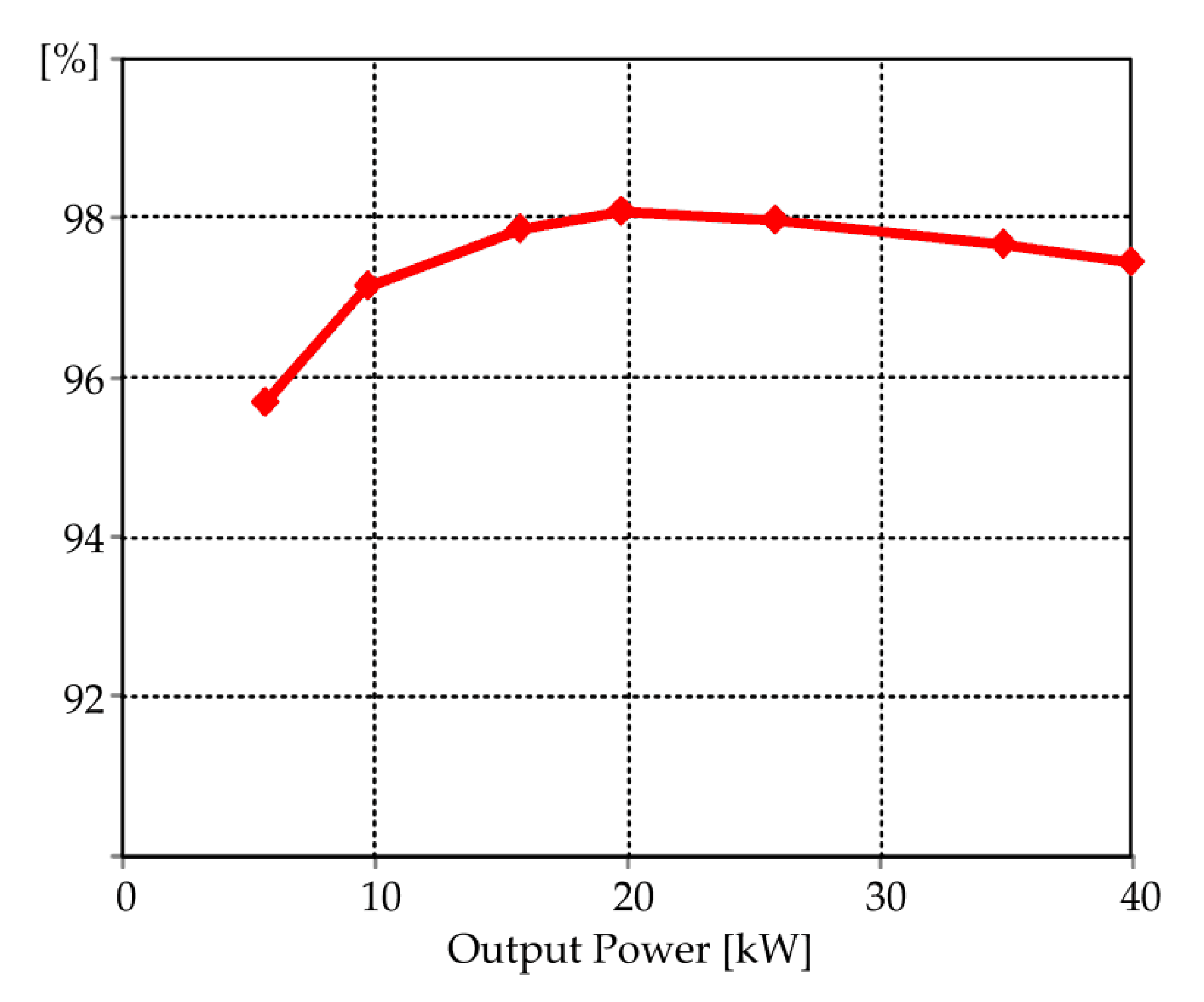
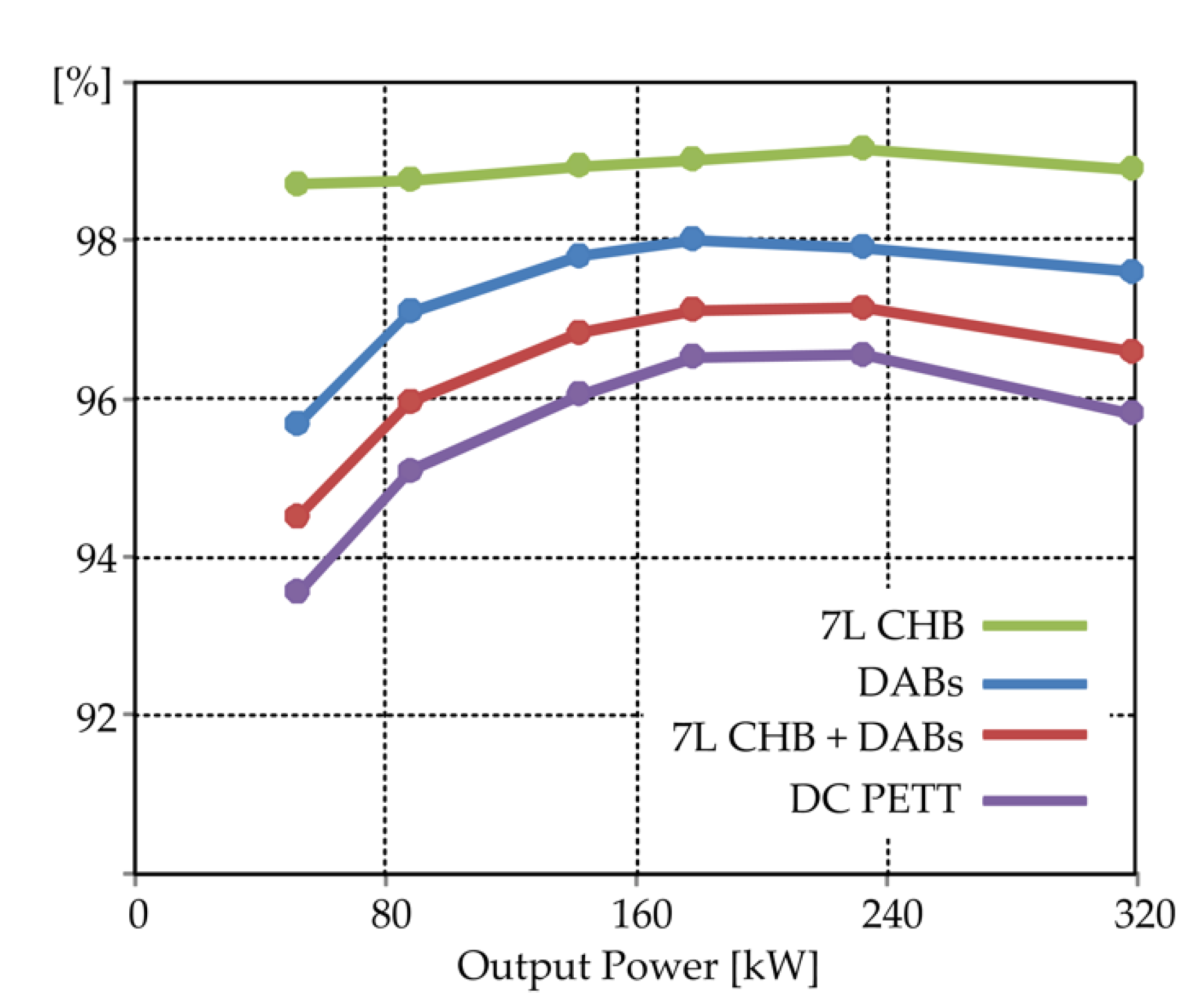
The efficiency of the SiC-based 3kV DC PETT prototype has been measured. As in [
19], the power consumption of the auxiliary converters supporting the cooling system and the control system has not been included in the efficiency calculations. The plots of efficiencies versus output power are shown in
Figure 22.
As can be seen from
Figure 22, the three-phase seven-level CHB traction inverter (7L CHB), considered separately, characterizes peak efficiency around 99%, which is comparable to the corresponding SiC based MV multilevel CHB inverters constructed from low-voltage SiC MOSFET transistors, presented in the literature [
22]. The efficiency of the 4QC input stage is slightly higher than that of the seven-level CHB traction inverter, because when cascaded H-bridges operate with a constant voltage of 3kV DC overhead traction line, actually only two SiC MOSFETs work in each H-bridge. However, thanks to the use of the full H-bridges in the DC PETT input stage instead of half bridges, it is possible that the developed SiC-based DC PETT can also work with an AC input voltage, as is the case with multi-system locomotives. However, the operation of the proposed SiC-based DC PETT in an AC voltage system is beyond the scope of this paper and will be the subject of future publications. As can be seen in
Figure 22, the isolation stage ensured by nine DAB DC-DC converters has the greatest impact on the efficiency of the entire SiC-based DC PETT. The SiC-based DC PETT prototype has an efficiency of around 96% in a wide range of output power and the peak efficiency around 96.5%.
7. Conclusions
The design and development of the SiC-based DC PETT intended for EMUs operated in 3 kV DC rail traction have been presented in this paper. The developed DC PETT has been implemented into the PESA 308 EN81 series electric passenger railcar that operates in Polish regional passenger rail transport. The conducted experimental tests during train runs on the trial confirm the full functionality of the developed device.
As with the MV PETT for AC traction [
19], the proposed DC PETT offers a number of advantages that make it very attractive for rolling stock operating in 3 kV DC traction. First of all, in the era of widespread striving to design highly efficient and ultra-quiet drive converters from SiC semiconductor devices, the proposed solution has a number of advantages if one compares it to high-voltage SiC traction inverters with a classic design being currently at the stage of analyzes and preliminary tests. Conventional two-level voltage source traction inverters of the working voltage in the catenary 3 kV DC would contain SiC MOSFET transistors with a voltage blocking of 6 kV, and the conventional three-level inverter voltage would contain SiC MOSFET transistors with a voltage blocking of 3 kV. It is already known that obtaining high voltage switching frequencies SiC MOSFET above 5 kHz is energy inefficient and the management of electromagnetic disturbances at such high switched energies is quite a challenge. The component modules of the proposed DC PETT, in the form of nine 4QC-DAB-DC/AC power electronic cells, are made with the use of low-voltage SiC technology (1200 V). The applied high switching frequency: 30 kHz to 1.2 kV SiC MOSFETs used in DAB DC-DC converters and 20 kHz to 1.2 kV SiC MOSFETs used in SiC MOSFET H-bridges of the input and output stage, do not cause as significant energy losses as it would be in the case of high voltage (>3 kV) SiC MOSFET technology. The applied high switching frequency allows for favorable elimination of noise from the converter operation. Moreover, the use of multi-level topology made it possible to follow the command voltage from the control system with very high precision and, therefore, enables the application of the high precision control of the traction motor. Moreover, compared to classical topologies, the applied active input stage with the regulator of the current drawn from the overhead line enables the minimization of the input LC filter and, thus, minimization of the total volume and cost, which the authors intend to make the subject of detailed analysis in future publications.
The MFT design path, discussed in detail in the article, shows that the important factors influencing the power density of the developed transformers are the provision of appropriate insulation gaps to ensure galvanic isolation at the level of 9 kV DC and the provision of structural gaps between the windings to obtain the desired transformer leakage inductance. In the case of the traction drive investigated in the paper, with a relatively small power of 325 kVA (500 kVA in peak), the power density of the designed 38 kW MFT was 3.5 kW/dm3 (≈5 kW/dm3 peak). This allows the authors to reasonably hope that for a higher power MFT, the power density obtained will also be higher. At the present stage, it is difficult to compare the power density of the developed 3kV DC PETT prototype with a built-in lightweight LCL input traction filter with 3 kV DC roof-mounted traction inverters available on the market because the solutions known to the authors have a heavy external traction filter mounted in a separate container, which is not taken into account by manufacturers to estimating the power density of the traction converter. The developed 3kV SiC-based DC PETT prototype, thanks to the built-in 4QC power input stage, is immediately ready for cooperation with the AC traction network in a multi-system EMUs. The proposed modular DC PETT structure, composed of the same repeatable power electronic cells, could ensure lower maintenance costs, short inspection and repair times for potential faults, and thus high availability - required in the rolling stock.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}