Analysis of the Use of Electric and Hybrid Drives on SWATH Ships



Abstract
:1. Introduction
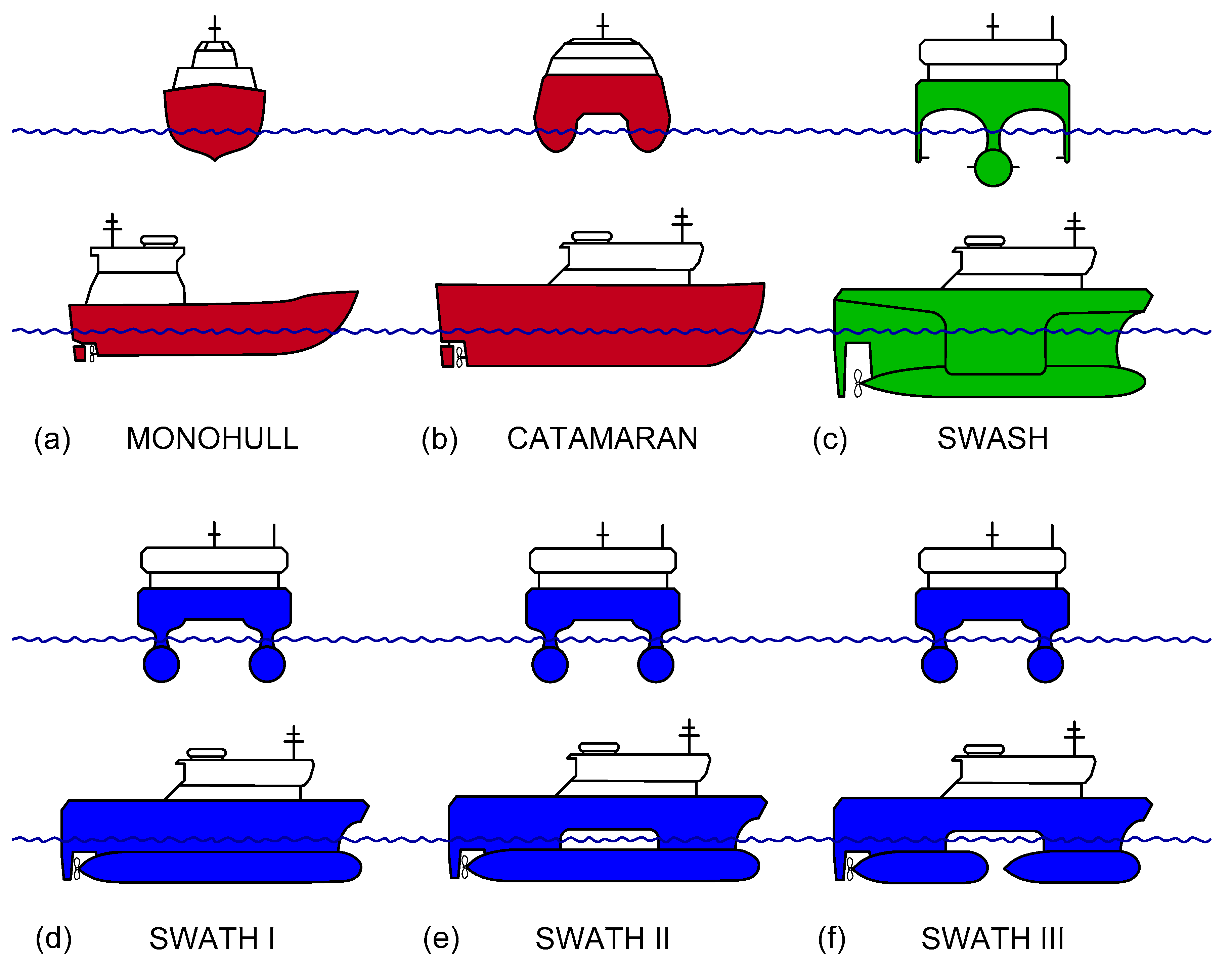
2. Operational Properties of SWATH Vessels
3. Modeling
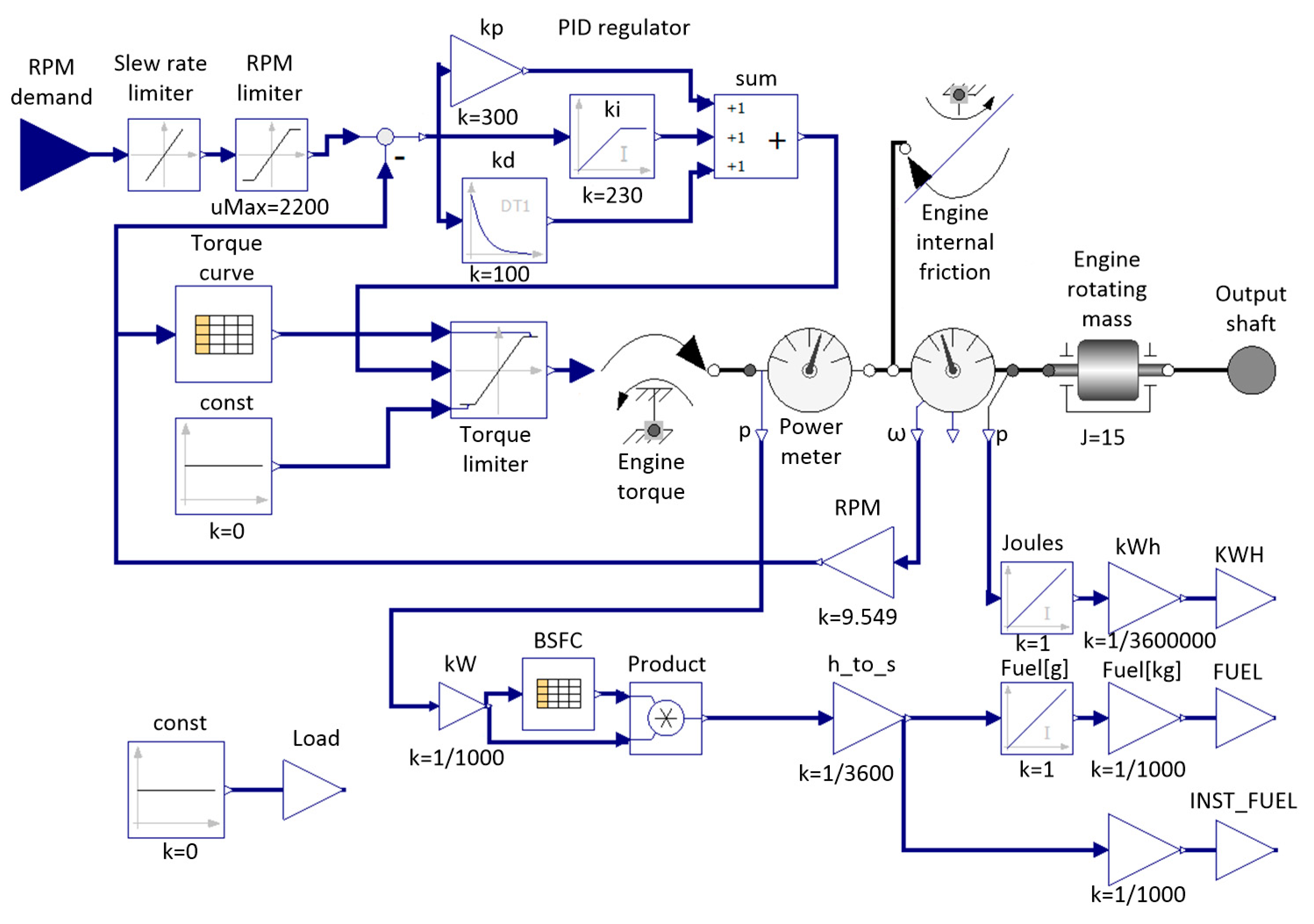
3.1. Mathematical Description
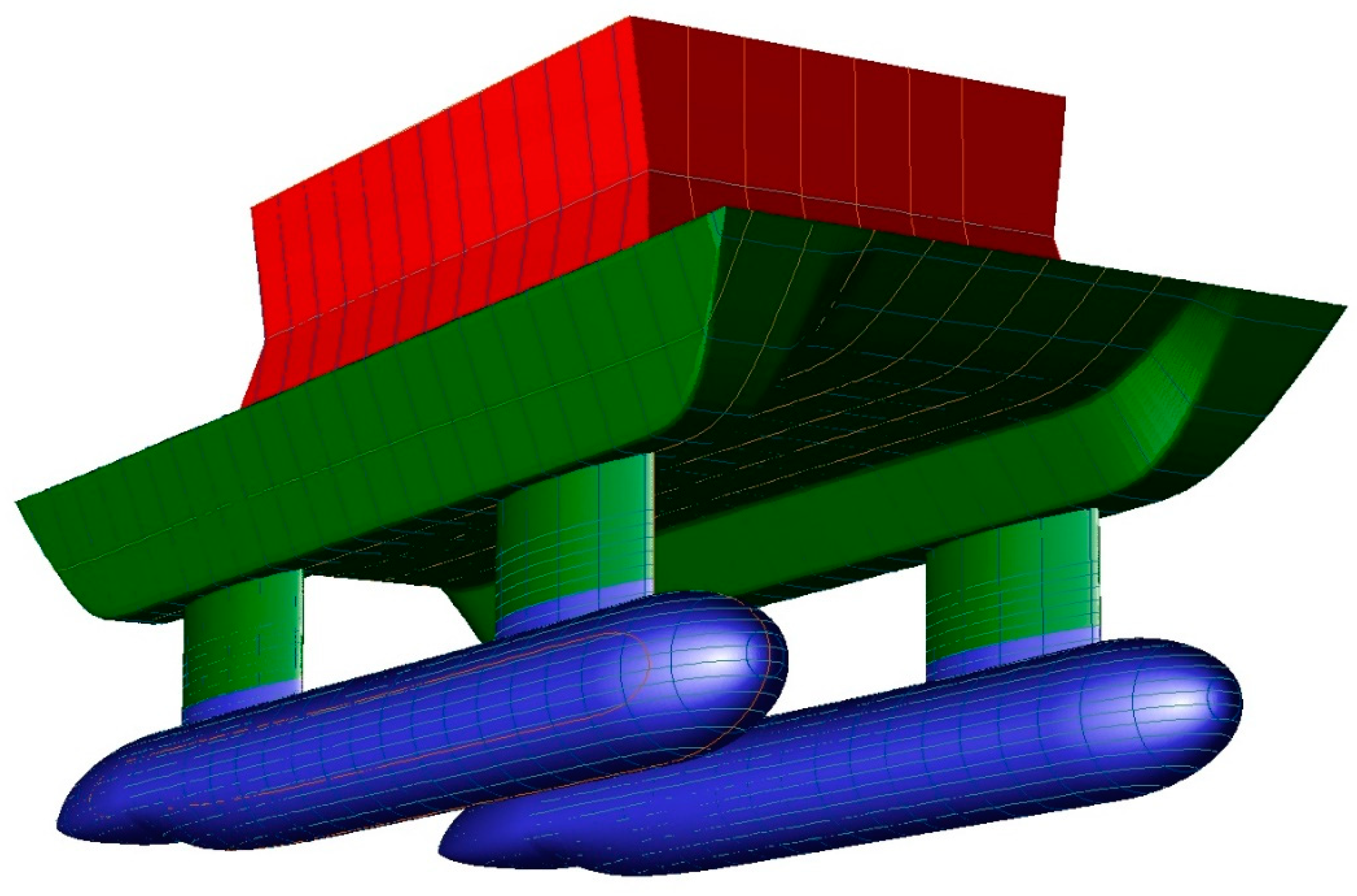
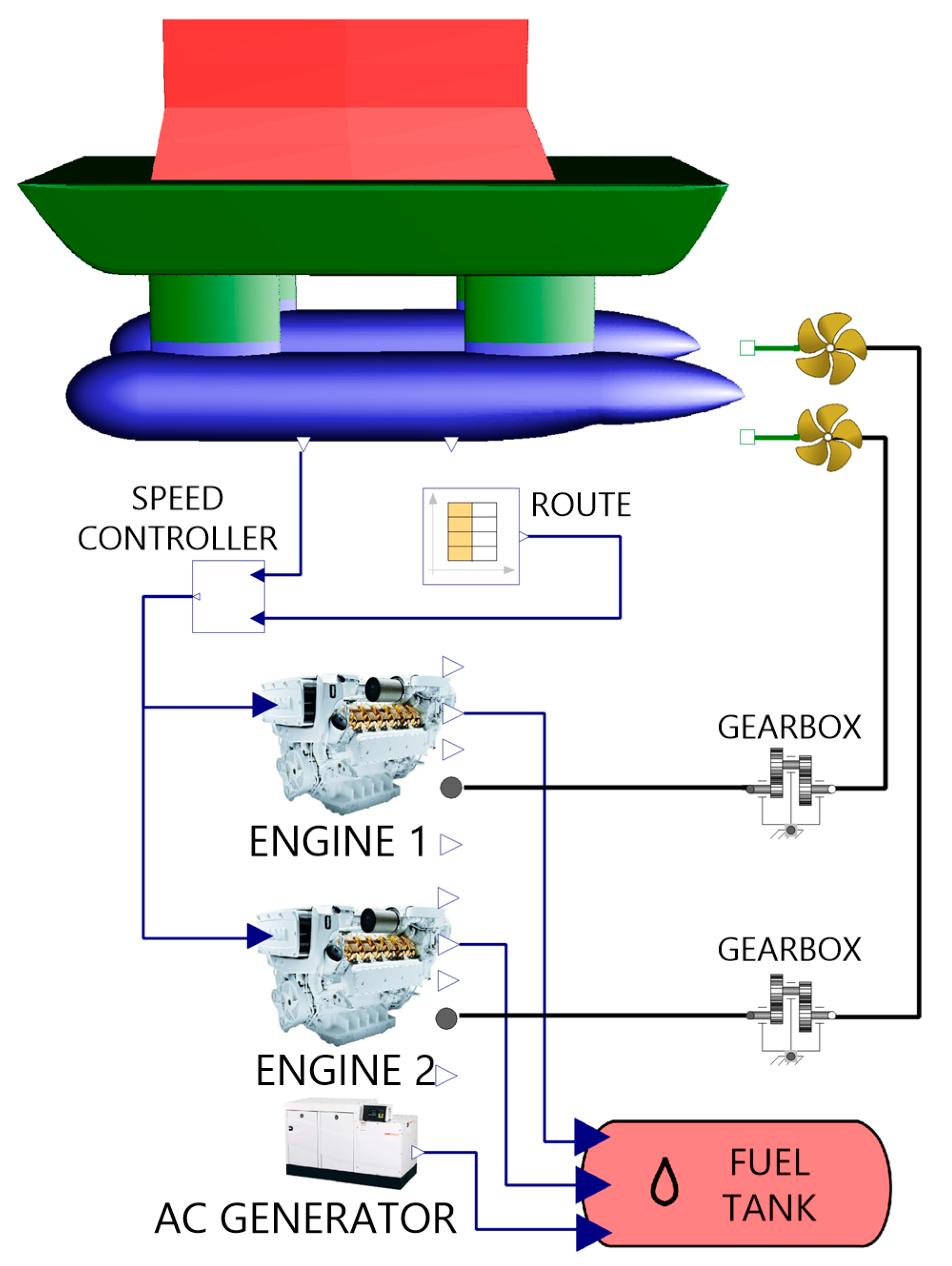
3.2. Model of a Hybrid SWATH II Powertrain
- −
- dynamics of the mechanical structure of the ship’s hull expressed on the basis of the geometrical shapes of the ship and its mass,
- −
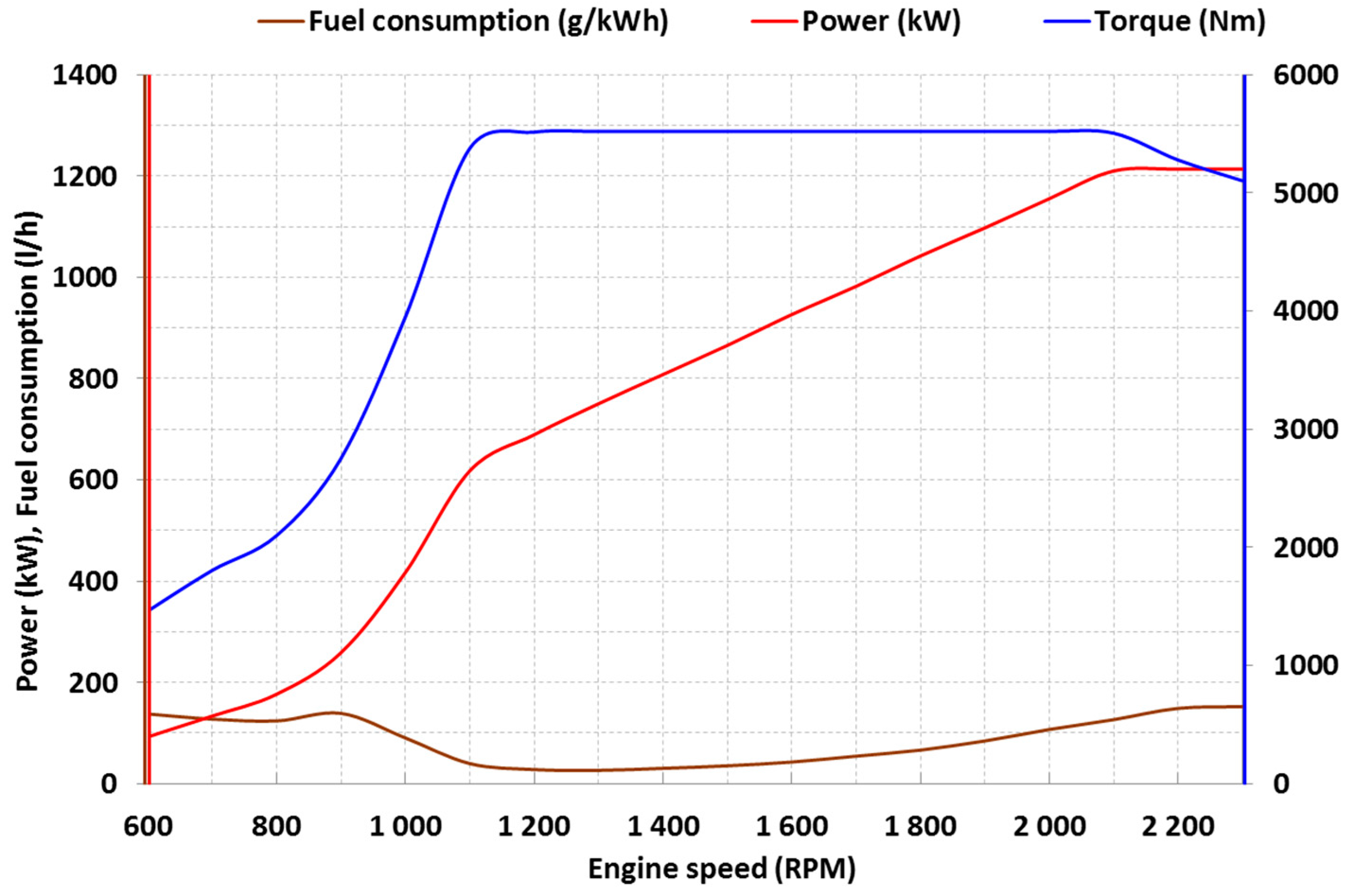
- description of the characteristics of internal combustion engines related to the generated power, torque and energy consumption (fuel) depending on the operating point (rotational speed, load),
- −
- description of the characteristics of the electric power generators related to the supplied mechanical power and the generated power at a specific efficiency defined by the efficiency map,
- −
- description of the properties of the electricity storage taking into account: cell temperature and related physicochemical properties such as maximum load current and operating voltage (SOC),
- −
- description of the properties of the inverter-motor electric drive system, taking into account: the efficiency of the inverter and the motor, the allowable load and power curve (torque, power, rotational speed, current, voltage),
- −
- ship’s propellers with a certain constant efficiency value,
- −
- gearboxes with a specific ratio and efficiency,
- −
- description of the properties of the DC/DC power electronic converter, taking into account the constant value of the average load of the on-board receivers,
- −
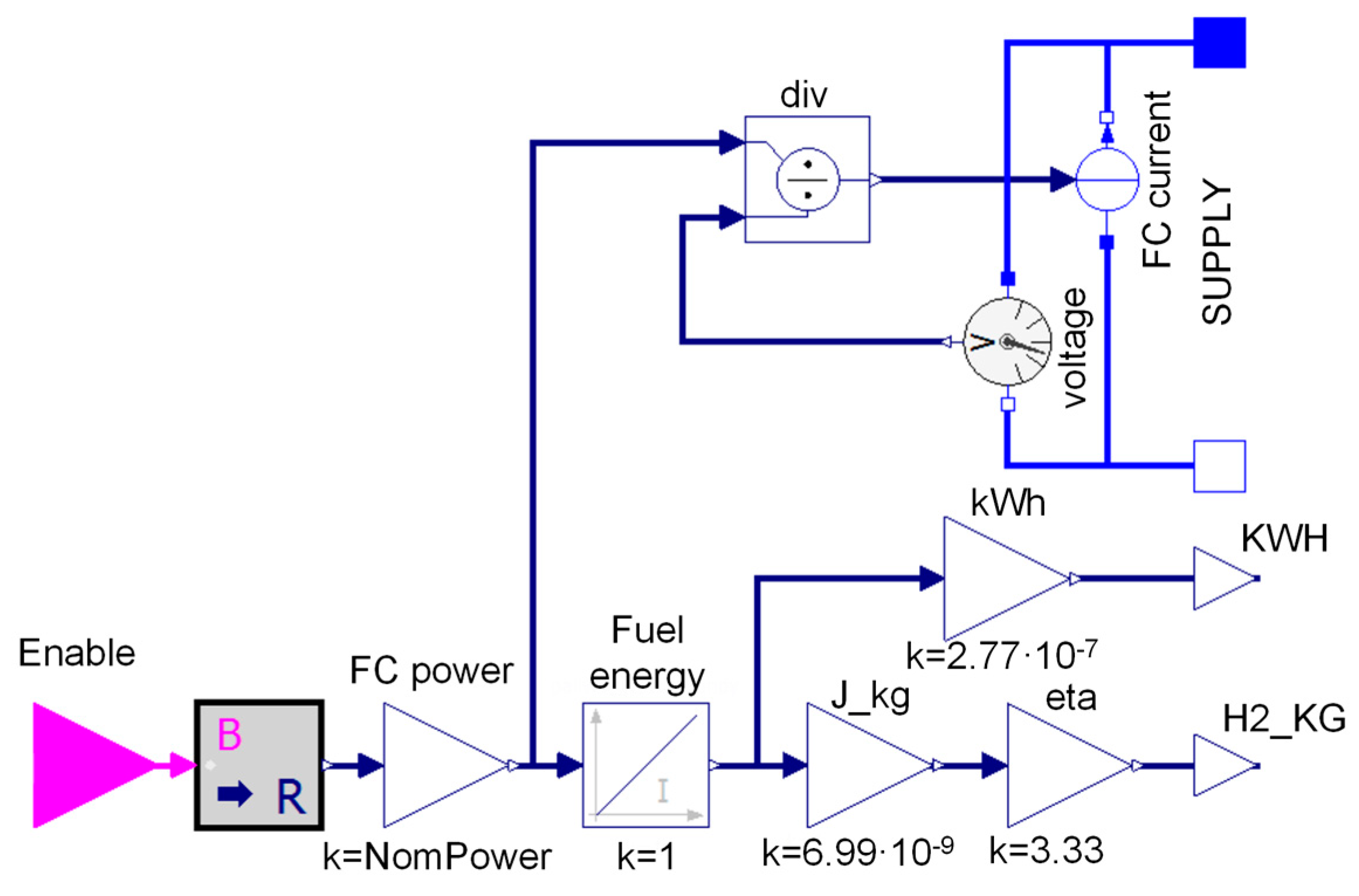
- description of the properties of the fuel cell related to the maximum load and consumption of the energy contained in the hydrogen fuel and its efficiency,
- −
- description of the properties of the hydrogen tank related to its parameters such as volume of hydrogen in the tank, hydrogen pressure,
- −
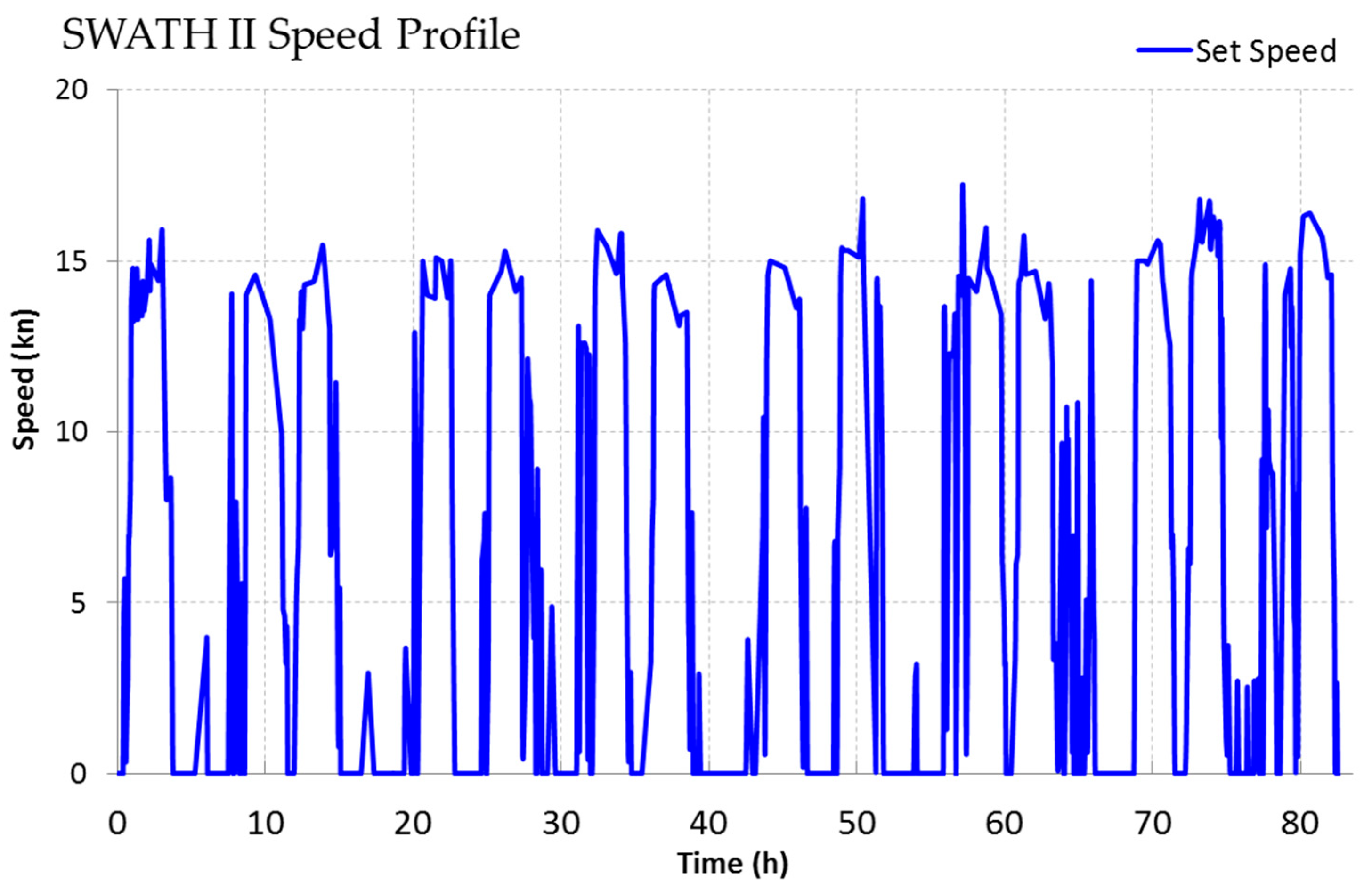
- ship’s speed regulator with a block for setting the route of passage (set speed on individual sections of the route),
- −
- power management system, including control of the flow and consumption of power between individual energy sources (generating sets, fuel cell, electric energy storage),
- −
- auxiliary generator for the DIESEL system, providing power supply at the level of a constant average load value of on-board receivers,
- −
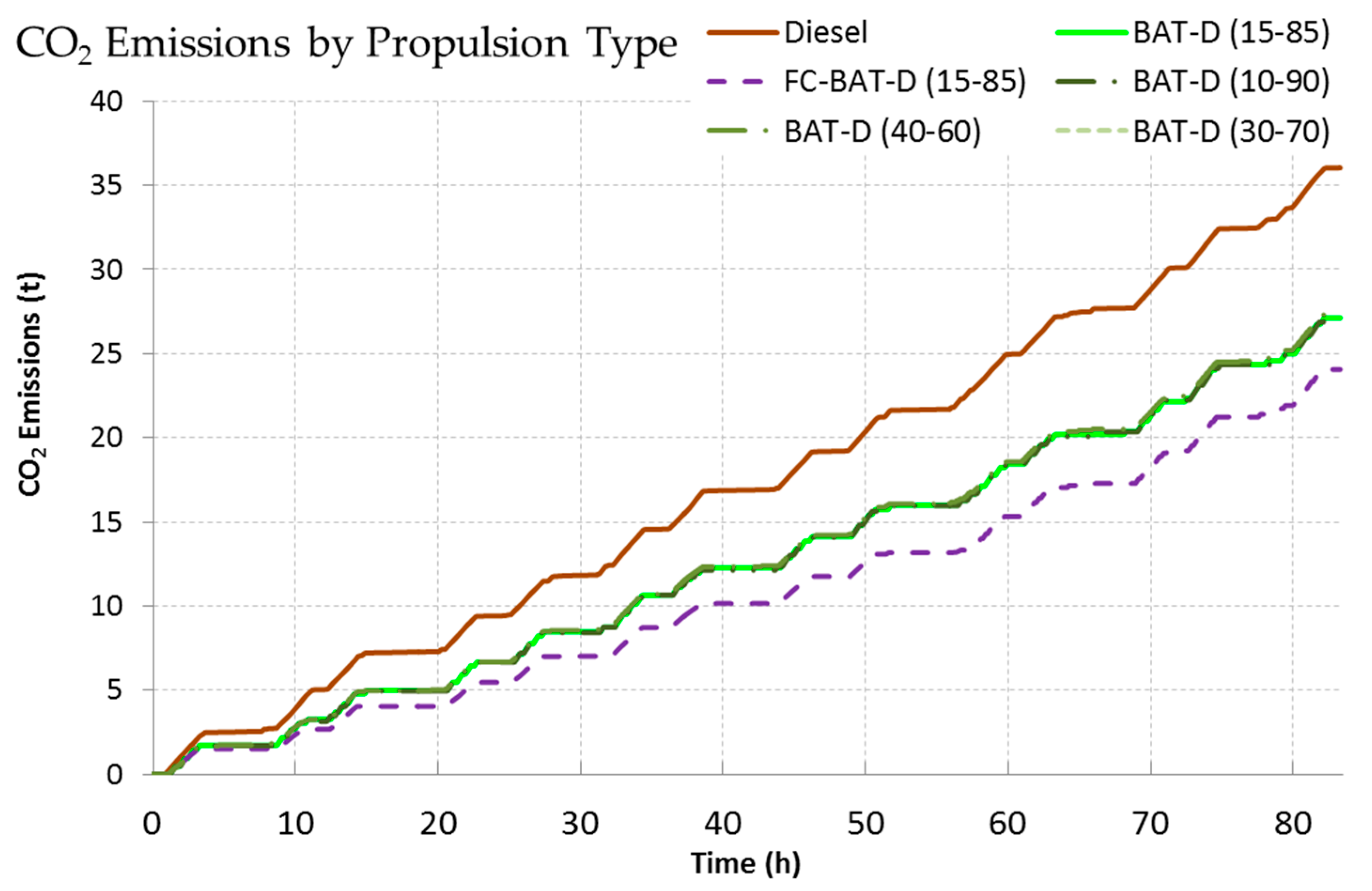
- a measurement system tasked with the recording of all electrical and mechanical parameters of the above-mentioned devices and additionally performing the functions of converting all parameters related to energy consumption, CO2 emissions and fuel costs.
4. Simulation Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brewer, T.L. A Maritime Emission Control Area for the Mediterranean Sea? Technological Solutions and Policy Options for a ‘Med ECA’. Euro-Mediterr. J. Environ. Integr. 2020, 5, 1–5. [Google Scholar] [CrossRef]
- Rouïl, L.; Ratsivalaka, C.; André, J.-M.; Allemand, N. ECAMED: A Technical Feasibility Study for the Implementation of an Emission Control Area (ECA) in the Mediterranean Sea—Synthesis Report; French National Institute for Industrial Environment and Risks: Verneuil-en-Halatte, France, 2019. [Google Scholar]
- Przybylowski, A. Baltic Sea Region cities advancing towards sustainable urban mobility—Copenhagen and Gdynia case studies. In Proceedings of the CERS—Engines of Urban and Regional Development, Banská Bystrica, Slovakia, 20–22 September 2017; pp. 495–505. [Google Scholar]
- Przybylowski, A. Global Trends Shaping Life Quality in Agglomerations with Particular Emphasis on Mobility in Seaport Agglomerations. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 615–620. [Google Scholar] [CrossRef]
- Shakeri, N.; Zadeh, M.K.; Nielsen, J.B. Hydrogen Fuel Cells for Ship Electric Propulsion: Moving Toward Greener Ships. IEEE Electrif. Mag. 2020, 8, 27–43. [Google Scholar] [CrossRef]
- Sierpinski, G.; Staniek, M.; Celinski, I. New Methods for Pro-Ecological Travel Behavior Learning. In Proceedings of the 8th International Conference of Education, Research and Innovation (ICERI), Seville, Spain, 18–20 November 2015; pp. 6926–6933. [Google Scholar]
- Skrúcaný, T.; Figlus, T.; Vrabel, J.; Šarkan, B.; Synák, F. Measuring of noise emitted by moving vehicles. MATEC Web Conf. 2017, 107, 00072. [Google Scholar] [CrossRef] [Green Version]
- Abramowicz-Gerigk, T.; Burciu, Z.; Jachowski, J. An Innovative Steering System for a River Push Barge Operated in Environmentally Sensitive Areas. Pol. Marit. Res. 2017, 24, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Abramowicz-Gerigk, T.; Burciu, Z.; Górski, W.; Reichel, M. Full scale measurements of pressure field induced on the quay wall by bow thrusters – indirect method for seabed velocities monitoring. Ocean Eng. 2018, 162, 150–160. [Google Scholar] [CrossRef]
- Yu, Z.Z.; Jing, L. Effects of exhaust post-treatment technology on diesel engine emissions. In Proceedings of the International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1804–1807. ISBN 978-1-4577-1701-7. [Google Scholar]
- Nevalainen, P.; Kinnunen, N.M.; Kirveslahti, A.; Kallinen, K.; Maunula, T.; Keenan, M.; Suvanto, M. Formation of NH 3 and N 2 O in a modern natural gas three-way catalyst designed for heavy-duty vehicles: The effects of simulated exhaust gas composition and ageing. Appl. Catal. A Gen. 2018, 552, 30–37. [Google Scholar] [CrossRef]
- Yun, L.; Bliault, A.; Rong, H.Z. High Speed Catamarans and Multihulls. In Technology, Performance, and Applications; Springer: New York, NY, USA, 2019; ISBN 9781493978908. [Google Scholar]
- Bonfiglio, L.; Perdikaris, P.; Vernengo, G.; De Medeiros, J.S.; Karniadakis, G. Improving SWATH Seakeeping Performance using Multi-Fidelity Gaussian Process and Bayesian Optimization. J. Ship Res. 2018, 62, 223–240. [Google Scholar] [CrossRef]
- Bonfiglio, L.; Perdikaris, P.; Brizzolara, S. Multi-fidelity Bayesian Optimization of SWATH Hull Forms. J. Ship Res. 2019. [Google Scholar] [CrossRef]
- Pérez-Arribas, F.; Calderon-Sanchez, J. A parametric methodology for the preliminary design of SWATH hulls. Ocean Eng. 2020, 197, 106823. [Google Scholar] [CrossRef]
- Air-Cushion Principle—Umoe WAVECRAFT™ %. Available online: https://www.wavecraft.no/technology/air-cushion-principle/ (accessed on 28 January 2020).
- Dubrovsky, W.A. Multi-Hull Vessels; M31805-037/048(01)-78/20-78; Shipbuilding Publishing House: Petersburg, Russia, 1978. (In Russian) [Google Scholar]
- Dubrovsky, V.A. Multi-hulls: New options and scientific developments. Ships Offshore Struct. 2010, 5, 81–92. [Google Scholar] [CrossRef]
- Medaković, J.; Dario, B.; Blagojević, B. A Comparison of Hull Resistances of a Mono-Hull and A SWATH Craft. Int. J. Eng. Sci. Innov. Technol. 2013, 2, 155–162. [Google Scholar]
- Nesteruk, I.; Krile, S.; Koboevic, Z. Electrical Swath Ships with Underwater Hulls Preventing the Boundary Layer Separation. J. Mar. Sci. Eng. 2020, 8, 652. [Google Scholar] [CrossRef]
- Grannemann, F. SWATH—A new concept for the Safety and Security at Sea. Cienc. Tecnol. Buques 2015, 8, 47–56. [Google Scholar] [CrossRef]
- Jaramillo, C.M. Improvement of Seaworthiness of Fast Catamaran by Hydrofoils Support. Master’s Thesis, University of Rostock, Rostock, Germany, 2017. [Google Scholar]
- Mahmud, S. The applicability of hydrofoils as a ship control device. J. Mar. Sci. Appl. 2015, 14, 244–249. [Google Scholar] [CrossRef]
- Prastowo, H.; Santoso, A.; Arya, A. Analysis and Optimation Hydrofoil Supported Catamaran (HYSUCAT) Size 25 Meter based on CFD Method. Int. J. Mar. Eng. Innov. Res. 2016, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Najafi, A.; Aliakbari, T.; Hashemi, S.A. Experimental optimization of hydrodynamic performance of catamarans using hydrofoil element. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 233, 488–501. [Google Scholar] [CrossRef]
- Birk, L. Fundamentals of Ship Hydrodynamics: Fluid Mechanics, Ship Resistance and Propulsion; John Wiley & Sons: Hoboken, NJ, USA, 2019; ISBN 1118855485. [Google Scholar]
- Naz, N.; Karim, M. Investigation of Hydrodynamic Characteristics of High Speed Multihull Vessels including Shallow Water Effect. Procedia Eng. 2017, 194, 51–58. [Google Scholar] [CrossRef]
- Prasad, B.; Dhanak, M. Hydrodynamics of Advanced-hull Surface Vehicles. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. ISBN 978-1-5386-4814-8. [Google Scholar]
- Kula, K. An Overview of Roll Stabilizers and Systems for Their Control. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 405–414. [Google Scholar] [CrossRef] [Green Version]
- Lisowski, J.; Mohamed-Seghir, M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sens. 2019, 11, 82. [Google Scholar] [CrossRef] [Green Version]
- Mohamed-Seghir, M. Methods based on fuzzy sets to solve problems of Safe Ship control. In Novel Algorithms and Techniques in Telecommunications and Networking; Sobh, T., Elleithy, K., Mahmood, A., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 2010; pp. 373–377. ISBN 978-90-481-3661-2. [Google Scholar]
- Krzysztof, S.K. Autopilot Using the Nonlinear Inverse Ship Model. In Marine Navigation and Safety of Sea Transportation; CRC Press: Boca Raton, FL, USA, 2015; pp. 101–107. [Google Scholar]
- Formela, K.; Neumann, T.; Weintrit, A. Overview of Definitions of Maritime Safety, Safety at Sea, Navigational Safety and Safety in General. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 285–290. [Google Scholar] [CrossRef]
- Guze, S.; Smolarek, L.; Weintrit, A. The area-dynamic approach to the assessment of the risks of ship collision in the restricted water. Sci. J. Marit. Univ. Szczec. 2016, 117, 88–93. [Google Scholar] [CrossRef]
- Lisowski, J. The Sensitivity of State Differential Game Vessel Traffic Model. Pol. Marit. Res. 2016, 23, 14–18. [Google Scholar] [CrossRef] [Green Version]
- Lisowski, J. Comparison of Dynamic Games in Application to Safe Ship Control. Pol. Marit. Res. 2014, 21, 3–12. [Google Scholar] [CrossRef] [Green Version]
- Czech, P. Autonomous vehicles: Basic issues. Sci. J. Silesian Univ. Technol. Ser. Transp. 2018, 100, 15–22. [Google Scholar] [CrossRef]
- Weintrit, A.; Neumann, T. Safety of Marine Transport Introduction; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Neumann, T. Routing Planning As an Application of Graph Theory with Fuzzy Logic. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 661–664. [Google Scholar] [CrossRef] [Green Version]
- Neumann, T. Good choice of transit vessel route using Dempster-Shafer Theory. In Proceedings of the 2015 International Siberian Conference on Control and Communications (SIBCON), Omsk, Russia, 21–23 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. ISBN 978-1-4799-7103-9. [Google Scholar]
- ISO. ISO 6954:2000. Available online: https://www.iso.org/standard/28883.html (accessed on 16 October 2020).
- Lin, Y.; Yang, Q.; Guan, G. Automatic design optimization of SWATH applying CFD and RSM model. Ocean Eng. 2019, 172, 146–154. [Google Scholar] [CrossRef]
- Boiko, A.; Bondarenko, O.; Davydenko, Y. Hull Parametric Modeling of a Small Waterplane Area Twin Hull ships. In Proceedings of the 2019 15th International Conference on the Experience of Designing and Application of CAD Systems (CADSM), Polyana (Svalyava), Ukraine, 26 February–2 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. ISBN 978-1-7281-0053-1. [Google Scholar]
- Zhao, S.; Xiang, M.; Zhou, H.; Zhang, W. Hydrodynamics Analysis on the High-Speed Surface Vehicle with Super-Cavitating Hydrofoils. J. Appl. Fluid Mech. 2018, 11, 1005–1012. [Google Scholar] [CrossRef]
- Guo, J.; Ji, X.-B.; Wen, Y.-Y.; Cui, X. A new shock factor of SWATH catamaran subjected to underwater explosion. Ocean Eng. 2017, 130, 620–628. [Google Scholar] [CrossRef] [Green Version]
- MarineLink. BMT, Philly Shipyard to Conduct U.S. Navy T-AGOS(X) Studies. Available online: https://www.marinelink.com/news/bmt-philly-shipyard-conduct-us-navy-481743 (accessed on 22 October 2020).
- Offshore Wind. Danish Yachts Launches 27m Cat-SWATH. Offshore Wind. Available online: https://www.offshorewind.biz/2015/03/30/danish-yachts-launches-27m-cat-swath/ (accessed on 22 October 2020).
- Twitter. RHB Stevedoring Rotterdam na Twitterze: Rhb Discharged a Super Catamaran “Sea Slice” from SAL “FRAUKE”. Available online: http://t.co/4aYuptNl7Z (accessed on 22 October 2020).
- Safe Transfer in the Elbe Estuary. Available online: https://www.mtu-solutions.com/eu/en/stories/marine/commercial-vessels/safe-transfer-in-the-elbe-estuary.html (accessed on 22 October 2020).
- Offshore Windservice. Available online: http://odfjellwind.com/ (accessed on 23 October 2020).
- FOB SWATH 4 Vessel. Photos from Fabian Vornholt. Available online: https://www.vesseltracker.com/en/Ships/Fob-Swath-4-9672947/gallery/1510548 (accessed on 23 October 2020).
- FOB SWATH 2,3,4,5 and 6—Offshore Windservice. Available online: http://odfjellwind.com/fob-swath-25m/ (accessed on 23 October 2020).
- MAN. Marine Diesel Engine, Technical Data Sheet V12-1650. Available online: https://pasch.es/pdfs/Naval/Motores/MAN/LIGERO/V12-1650.pdf (accessed on 23 October 2020).
- Haase, M.; Davidson, G.; Thomas, G.; Binns, J.; Bose, N. A Practical Design Approach including Resistance Predictions for Medium-speed Catamarans. Ship Technol. Res. 2013, 60, 4–12. [Google Scholar] [CrossRef]
- Vernengo, G.; Villa, D.; Bruzzone, D.; Bonfiglio, L. A study on the added resistance of a catamaran advancing in waves considering variations of both operating and geometric parameters. Ships Offshore Struct. 2020, 1–19. [Google Scholar] [CrossRef]
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion: Practical Estimation of Ship Propulsive Power; Molland, A.F., Turnock, S.R., Hudson, D.A., Eds.; Cambridge University Press: Cambridge, UK, 2011; ISBN 9780521760522. [Google Scholar]
- Kim, M.; Hizir, O.; Turan, O.; Day, S.; Incecik, A. Estimation of added resistance and ship speed loss in a seaway. Ocean Eng. 2017, 141, 465–476. [Google Scholar] [CrossRef] [Green Version]
- Begovic, E.; Bertorello, C.; Mancini, S. Hydrodynamic Performances of Small Size Swath Craft. Brodogr. Shipbild. 2015, 2015, 1–22. [Google Scholar]
- Carlton, J.S. Marine Propellers and Propulsion; Elsevier: Amsterdam, The Netherlands, 2019; ISBN 9780081003664. [Google Scholar]
- Begovic, E.; Bertorello, C.; Bove, A.; De Luca, F. Experimental study on hydrodynamic performance of SWATH vessels in calm water and in head waves. Appl. Ocean Res. 2019, 85, 88–106. [Google Scholar] [CrossRef]
- FREE! Ship Plus. Available online: https://sourceforge.net/projects/freeship/ (accessed on 10 September 2019).
- The Modelica Association—Modelica Association. Available online: https://www.modelica.org/ (accessed on 30 October 2020).
- AIS Marine Traffic. MarineTraffic: Global Ship Tracking Intelligence. Available online: https://www.marinetraffic.com (accessed on 19 October 2020).
- Figlus, T. A Method for Diagnosing Gearboxes of Means of Transport Using Multi-Stage Filtering and Entropy. Entropy 2019, 21, 441. [Google Scholar] [CrossRef] [Green Version]
- Mohamed-Seghir, M.; Krama, A.; Refaat, S.S.; Trabelsi, M.; Abu-Rub, H. Artificial Intelligence-Based Weighting Factor Autotuning for Model Predictive Control of Grid-Tied Packed U-Cell Inverter. Energies 2020, 13, 3107. [Google Scholar] [CrossRef]
- Mansouri, M.; Mohamed-Seghir, M.M.; Nounou, H.N.; Nounou, M.N.; Abu-Rub, H. Bayesian methods for time-varying state and parameter estimation in induction machines. Int. J. Adapt. Control. Signal. Process. 2015, 29, 905–924. [Google Scholar] [CrossRef]
- Iwaszkiewicz, J.; Mysiak, P. Supply System for Three-Level Inverters Using Multi-Pulse Rectifiers with Coupled Reactors. Energies 2019, 12, 3385. [Google Scholar] [CrossRef] [Green Version]
- Iwaszkiewicz, J. Trójfazowy trójpoziomowy falownik z obniżoną zawartością harmonicznych. Przegląd Elektrotechniczny 2019, 1, 128–133. [Google Scholar] [CrossRef] [Green Version]
- Masnicki, R.; Mindykowski, J. Coordination of operations in registration channel of data from electrical power system. Measurement 2017, 99, 68–77. [Google Scholar] [CrossRef]
- Masnicki, R. The Fluency of Data Flow in the Instrument for Measurement and Registration of Parameters of the Electrical Power Network. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 2040–2044. [Google Scholar]
- Gnacinski, P.; Tarasiuk, T.; Mindykowski, J.; Peplinski, M.; Gorniak, M.; Hallmann, D.; Pillat, A. Power Quality and Energy-Efficient Operation of Marine Induction Motors. IEEE Access 2020, 8, 152193–152203. [Google Scholar] [CrossRef]
- Gnaciński, P.; Mindykowski, J.; Tarasiuk, T. Effect of power quality on windings temperature of marine induction motors. Part II: Results of investigations and recommendations for related regulations. Energy Convers. Manag. 2009, 50, 2477–2485. [Google Scholar] [CrossRef]
- Al-Falahi, M.D.A.; Tarasiuk, T.; Jayasinghe, S.D.G.; Jin, Z.; Enshaei, H.; Guerrero, J. AC Ship Microgrids: Control and Power Management Optimization. Energies 2018, 11, 1458. [Google Scholar] [CrossRef] [Green Version]
- Ballard Power Systems, Inc. Fuel Cell Power Module for Heavy Duty Motive Applications. Available online: https://www.ballard.com/docs/default-source/spec-sheets/fcvelocitymd.pdf?sfvrsn=ebc380_2 (accessed on 20 October 2020).
- GUPTA, H.N. Fundamentals of Internal Combustion Engines; PHI Learning: New Delhi, India, 2013; ISBN 9788120346802. [Google Scholar]
- Ship & Bunker. Rotterdam Bunker Prices. Available online: https://shipandbunker.com/prices/emea/nwe/nl-rtm-rotterdam (accessed on 26 November 2020).
- EUROSTAT—Statistics Explained. Electricity Price Statistics. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php/Electricity_price_statistics (accessed on 26 November 2020).
- Min-Hon, R.; Yu-Ling, K.; Guan-Ting, Y.; Shi-Chung, C.; Rei, M.-H.; Kao, Y.-L.; Yeh, G.-T.; Chen, S.-C. The Influence of the Hydrogen Supply Modes on a Hydrogen Refueling Station. Mod. Econ. 2020, 11, 867–880. [Google Scholar] [CrossRef] [Green Version]
- Graphenano. A Spanish Company Develops a Battery with an Autonomy of 800 km. Available online: https://www.graphenano.com/en/una-empresa-espanola-desarrolla-una-bateria-con-autonomia-800-kilometros/ (accessed on 10 October 2020).
- Moro, A.; Lonza, L. Electricity carbon intensity in European Member States: Impacts on GHG emissions of electric vehicles. Transp. Res. Part D Transp. Environ. 2018, 64, 5–14. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Parameter | Description |
|---|---|---|---|
| Name | M/V Fob Swath 2-3-4-5 | Engines | 2 × 1213 kW MAN V12-1650 |
| Owner | Offshore Windservice A/S | Waterjets | 2× Hamilton HM721 |
| Built | 2014–2015/2020 | Gear | 2× Hundested GI50 |
| Type | SWATH | Generator | 2 × 80 ekW KOHLER/John Deere |
| Classification | DNV-GL 1A1 HSCLC CREW R1 | Service speed | 20–22 kn |
| Hull and Superstruct. | Aluminum | Max. speed | 23–24 kn |
| Gross Tonnage | 243 | Fuel tank | 36,000 L |
| Net Tonnage | 73 | Fuel consumpt. | approx. 323 L/h |
| Length Overall | 25.70 m | Operating time | 24 h |
| Breadth | 10.60 m | Freshwater | 4000 L |
| Draft max CAT | 1.80 m | Crew | 4 |
| Draft max SWATH | 2.40 m | IP | 24 |
| Crane | TMP750K, max. load 1.47 t (5 m) |
| Parameter | Unit | Monohull | Catamaran | SWATH I | SWATH II | SWATH III | SWATH IV |
|---|---|---|---|---|---|---|---|
| Torpedoes (floats) | - | 0 | 0 | 2 | 2 | 3 | 1 |
| Strut | - | 0 | 0 | 2 | 4 | 4 | 3 |
| Hull | - | 1 | 2 | 0 | 0 | 0 | 0 |
| Strut breadth | m | - | 2.50 | 0.61 | 0.65 | 0.65 | 0.87 |
| Strut length | m | - | 25.40 | 15.73 | 9.10 | 9.14 | 15.74 |
| Length Overall LOA | m | 25 | 25 | 25 | 25 | 25 | 25 |
| Beam Overall BOA | m | 11 | 11 | 11 | 11 | 11 | 11 |
| Waterline Beam BWL | m | 10.50 | 11.00 | 8.67 | 8.67 | 8.67 | 8.38 |
| Waterline Length LWL | m | 22.37 | 23.38 | 15.75 | 15.59 | 15.59 | 15.74 |
| Draft | m | 1.40 | 1.50 | 2.71 | 2.71 | 2.71 | 4.10 |
| Displaced volume | m3 | 190.91 | 173.42 | 171.31 | 157.03 | 158.88 | 70.17 |
| Displacement | t | 195.87 | 177.93 | 175.76 | 161.11 | 163.01 | 71.99 |
| Wetted area | m2 | 231.08 | 229.02 | 314.82 | 302.01 | 308.41 | 161.55 |
| Waterplane area coeff. | - | 0.844 | 0.559 | 0.106 | 0.053 | 0.053 | 0.108 |
| Total resistance (at 24 kn) | kN | 139.00 | 171.65 | 165.65 | 159.88 | 157.95 | 138.59 |
| Total Power (at 24 kn) | kW | 2451.72 | 2119.27 | 2921.71 | 2819.97 | 2785.95 | 2444.54 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łebkowski, A.; Koznowski, W. Analysis of the Use of Electric and Hybrid Drives on SWATH Ships. Energies 2020, 13, 6486. https://doi.org/10.3390/en13246486
Łebkowski A, Koznowski W. Analysis of the Use of Electric and Hybrid Drives on SWATH Ships. Energies. 2020; 13(24):6486. https://doi.org/10.3390/en13246486
Chicago/Turabian StyleŁebkowski, Andrzej, and Wojciech Koznowski. 2020. "Analysis of the Use of Electric and Hybrid Drives on SWATH Ships" Energies 13, no. 24: 6486. https://doi.org/10.3390/en13246486
APA StyleŁebkowski, A., & Koznowski, W. (2020). Analysis of the Use of Electric and Hybrid Drives on SWATH Ships. Energies, 13(24), 6486. https://doi.org/10.3390/en13246486