Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling of the Wind Energy Conversion System Based on PMSG
2.1. Model of Mechanical and Electrical Parts
2.1.1. Wind Turbine Model
2.1.2. Electrical Model of PMSG
2.1.3. DC-Link Model
2.1.4. Grid-Side Model
2.2. Control Circuits of the Back-to-Back Converter
2.2.1. MSC Controller
2.2.2. GSC Controller
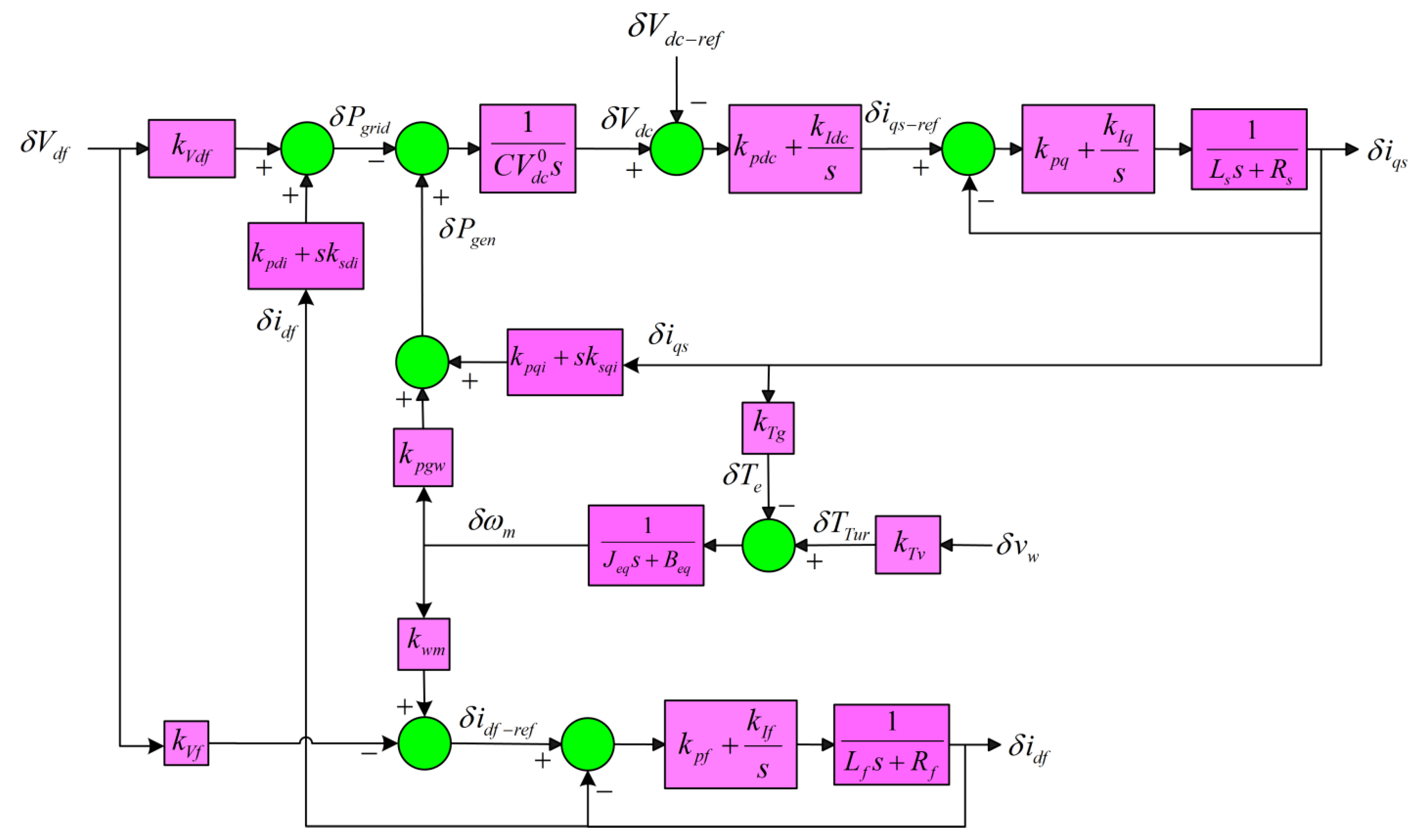
3. Small Signal Model of the Wind Turbine System
3.1. Small Signal Model of the Mechanical Part
3.2. Small-Signal Model of PMSG Electrical Part
3.3. Small-Signal Model of DC-Link
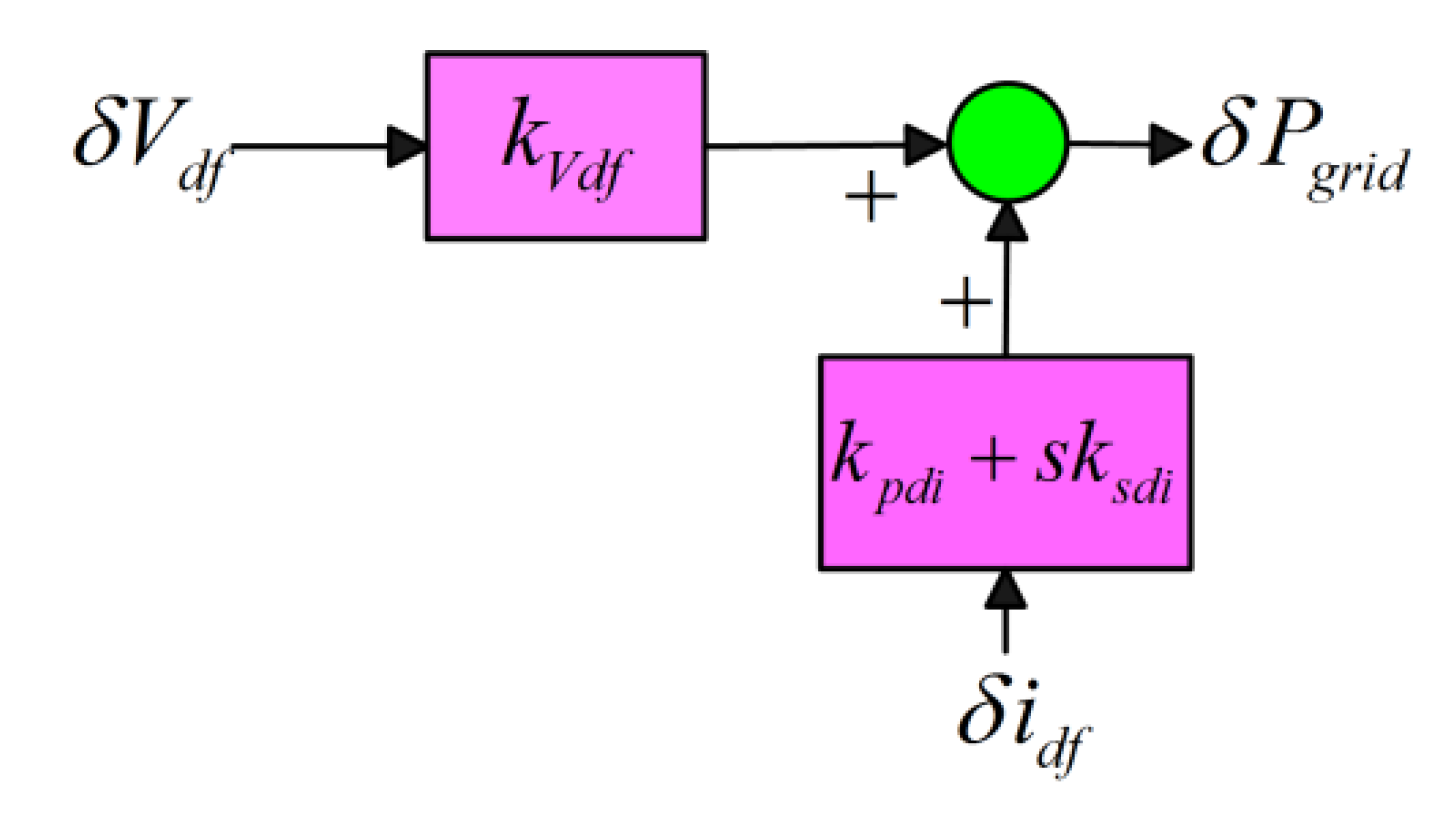
3.4. Small-Signal Model of Grid-Side
3.5. Small-Signal Model of Back-to-Back Converter Controllers
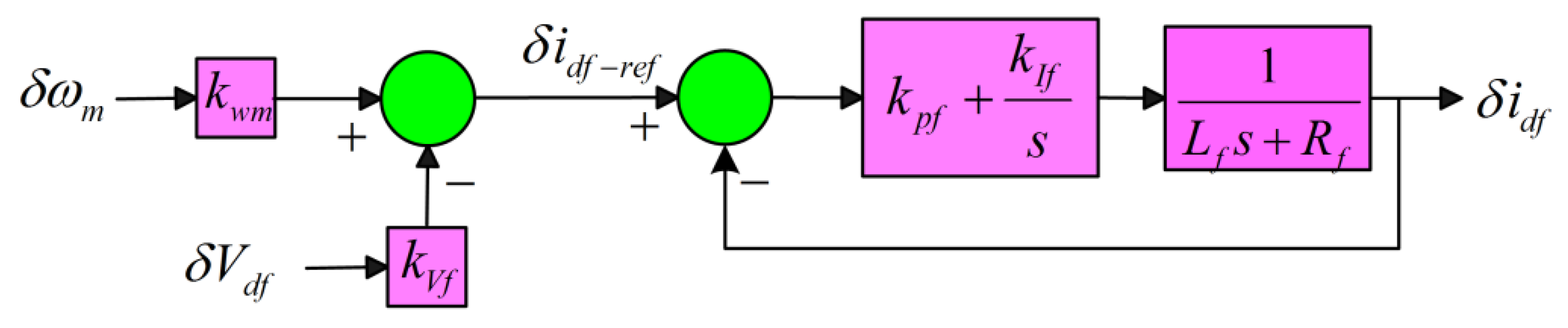
3.5.1. Small-Signal Model of MSC Controller
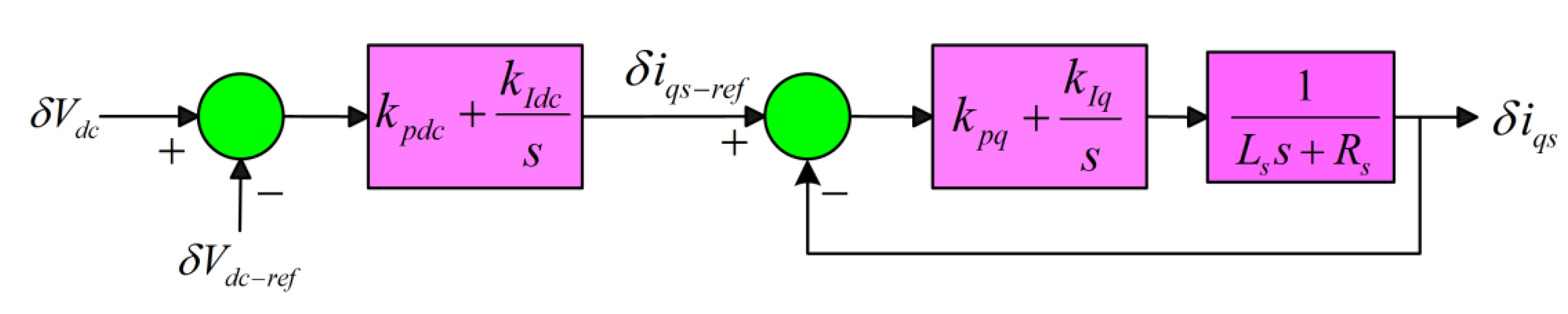
3.5.2. Small-Signal Model of GSC Controller
4. Simulation Results
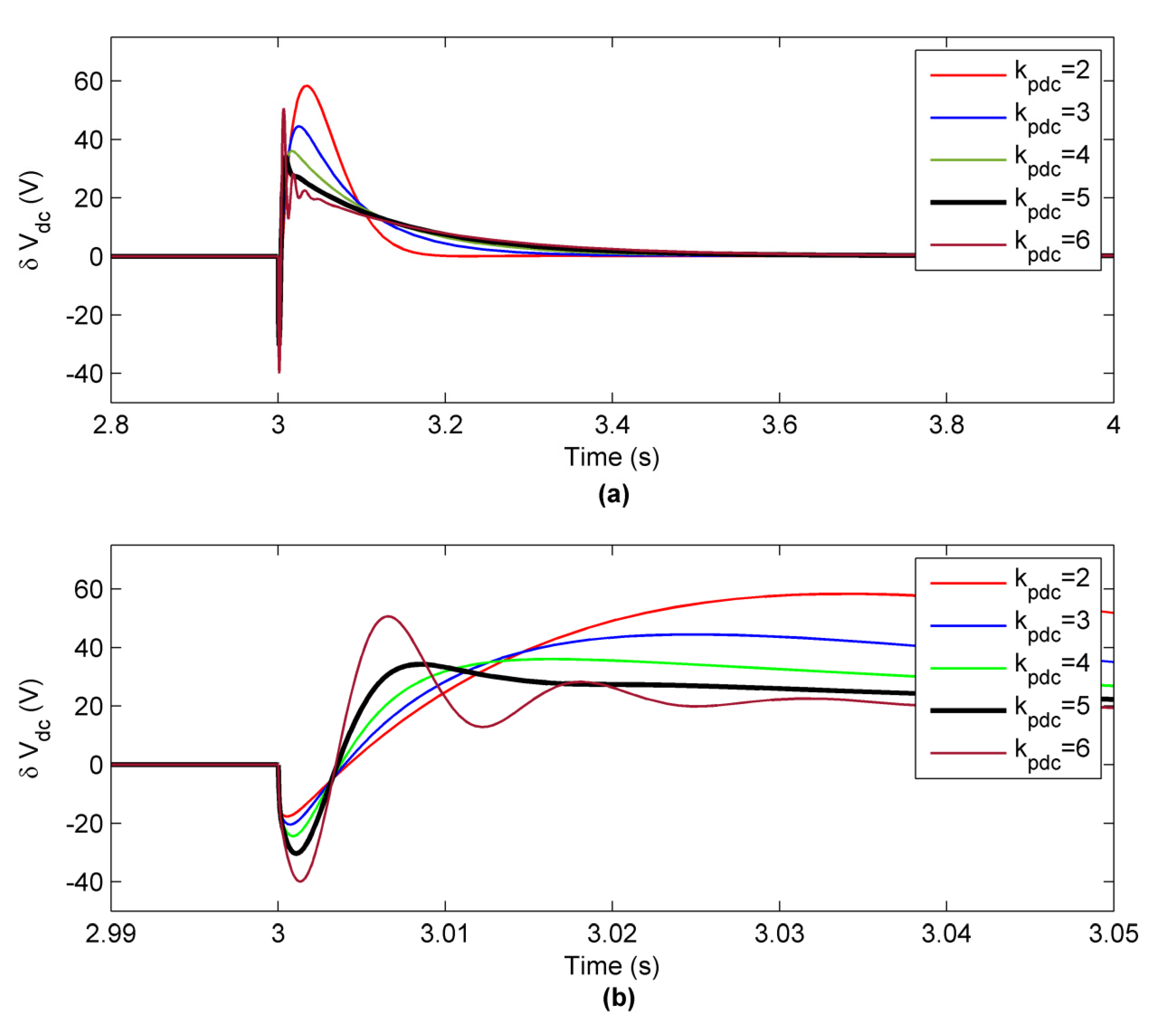
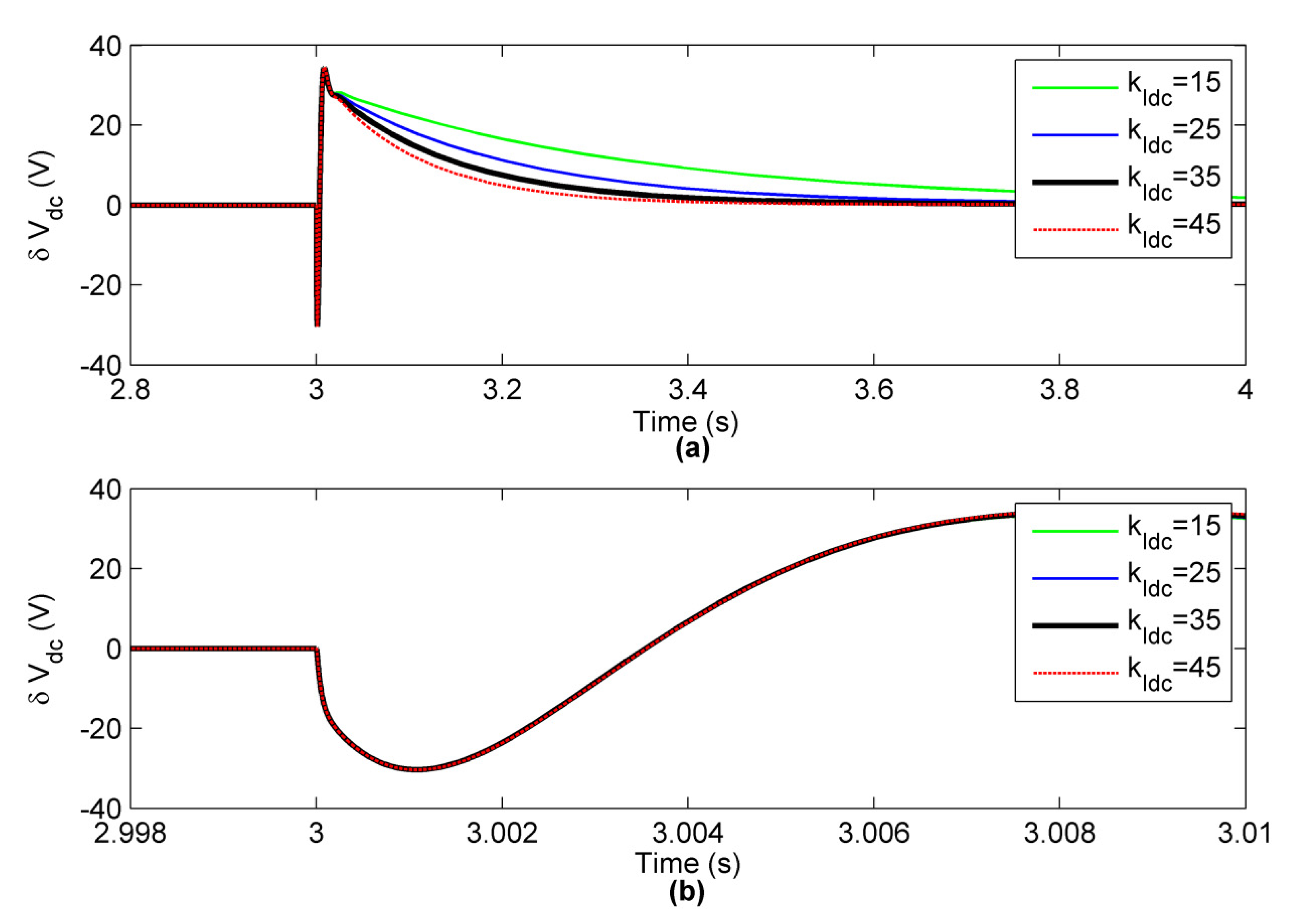
4.1. Case (a) Optimization of the PI Controller Gains in the DC-Link Voltage Loop
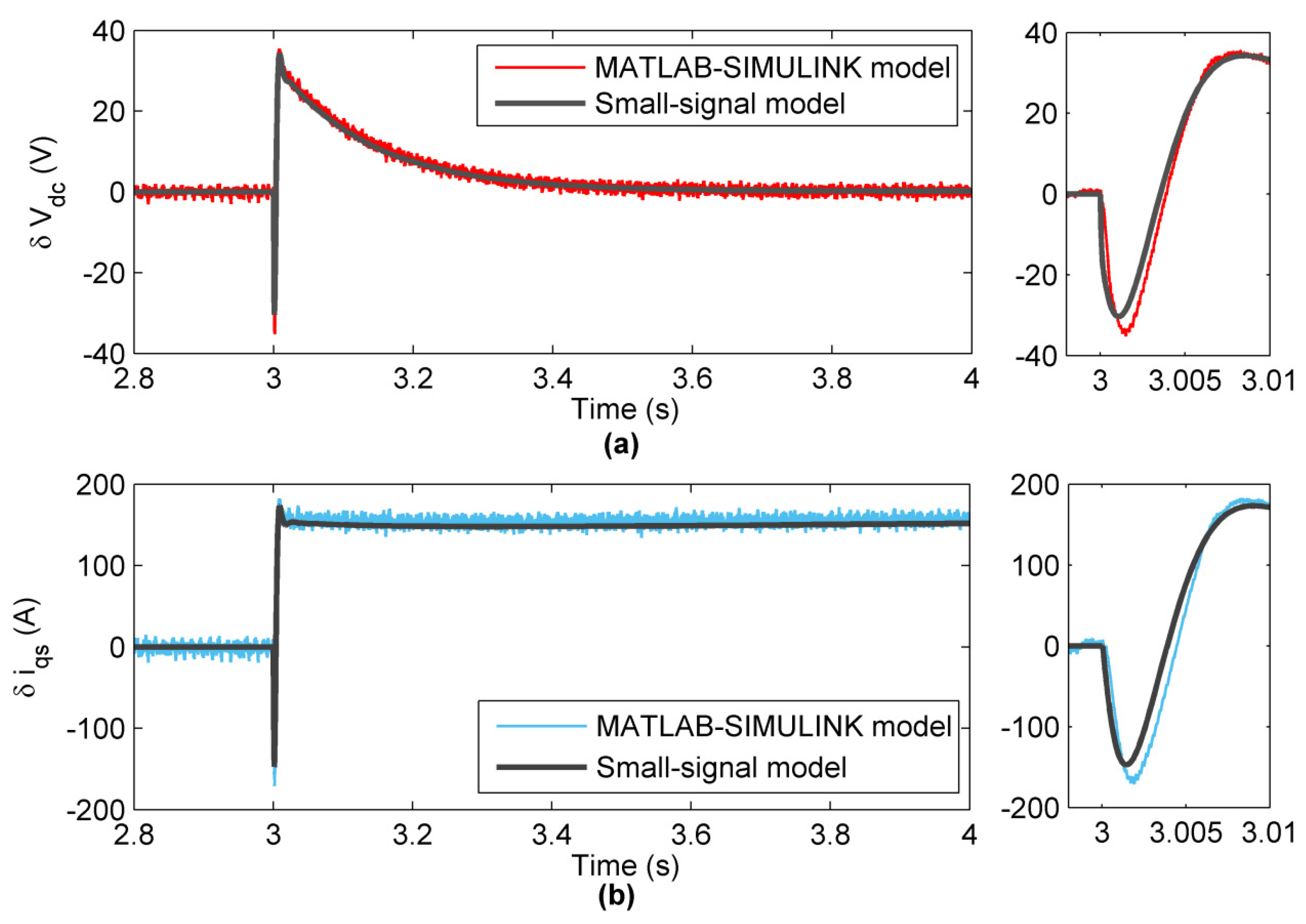
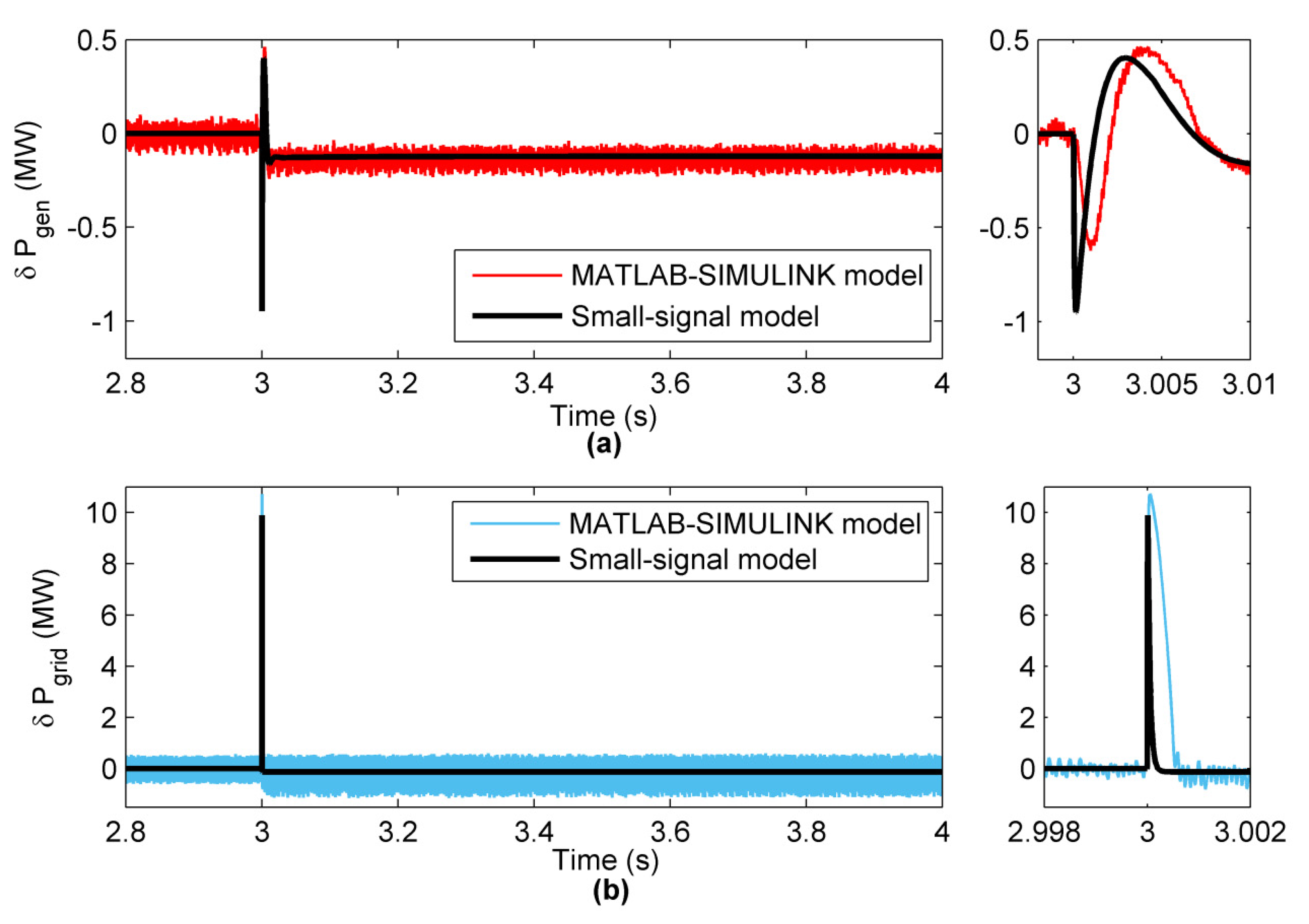
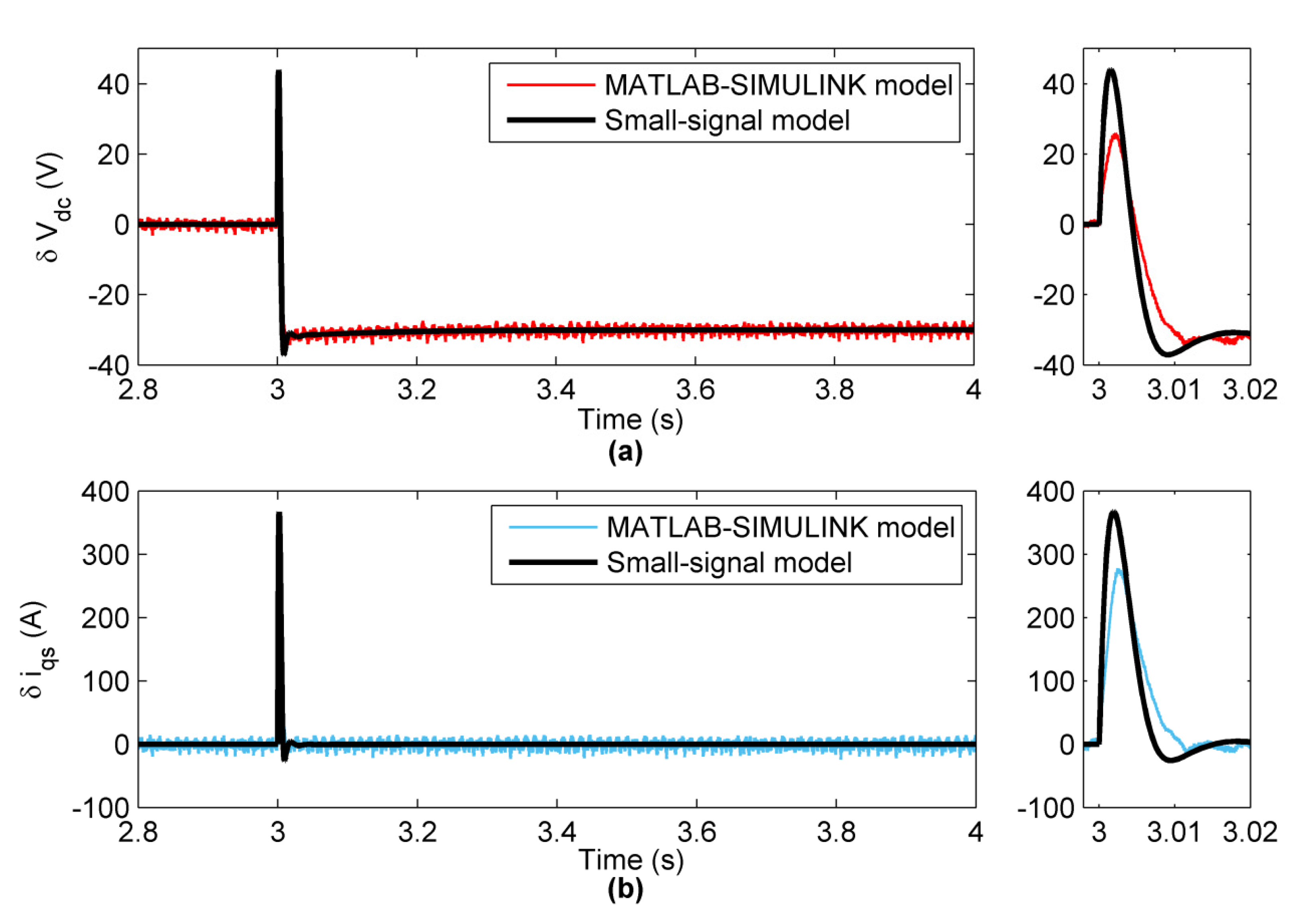
4.2. Case (b) Step Response Simulation and Comparison of the
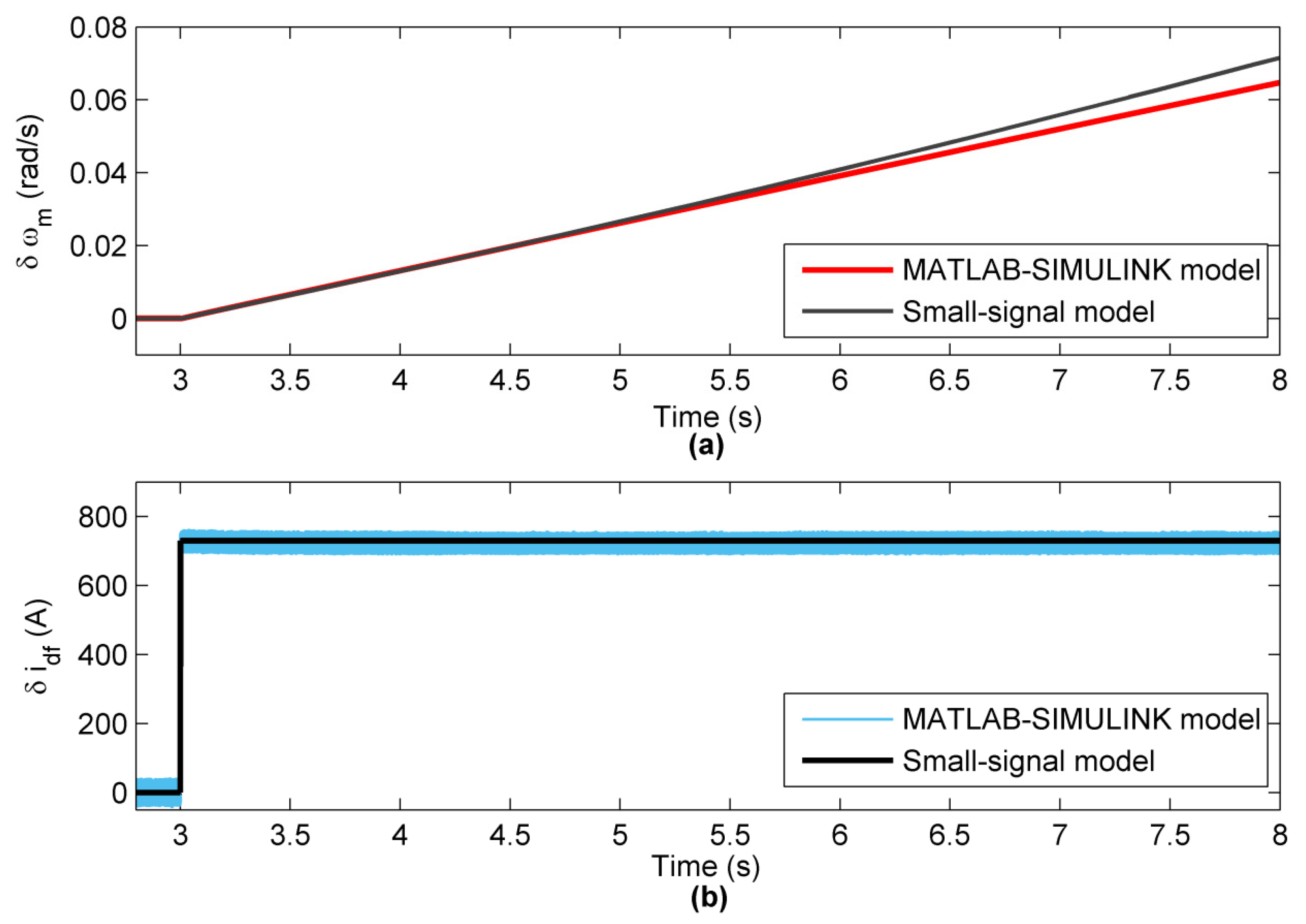
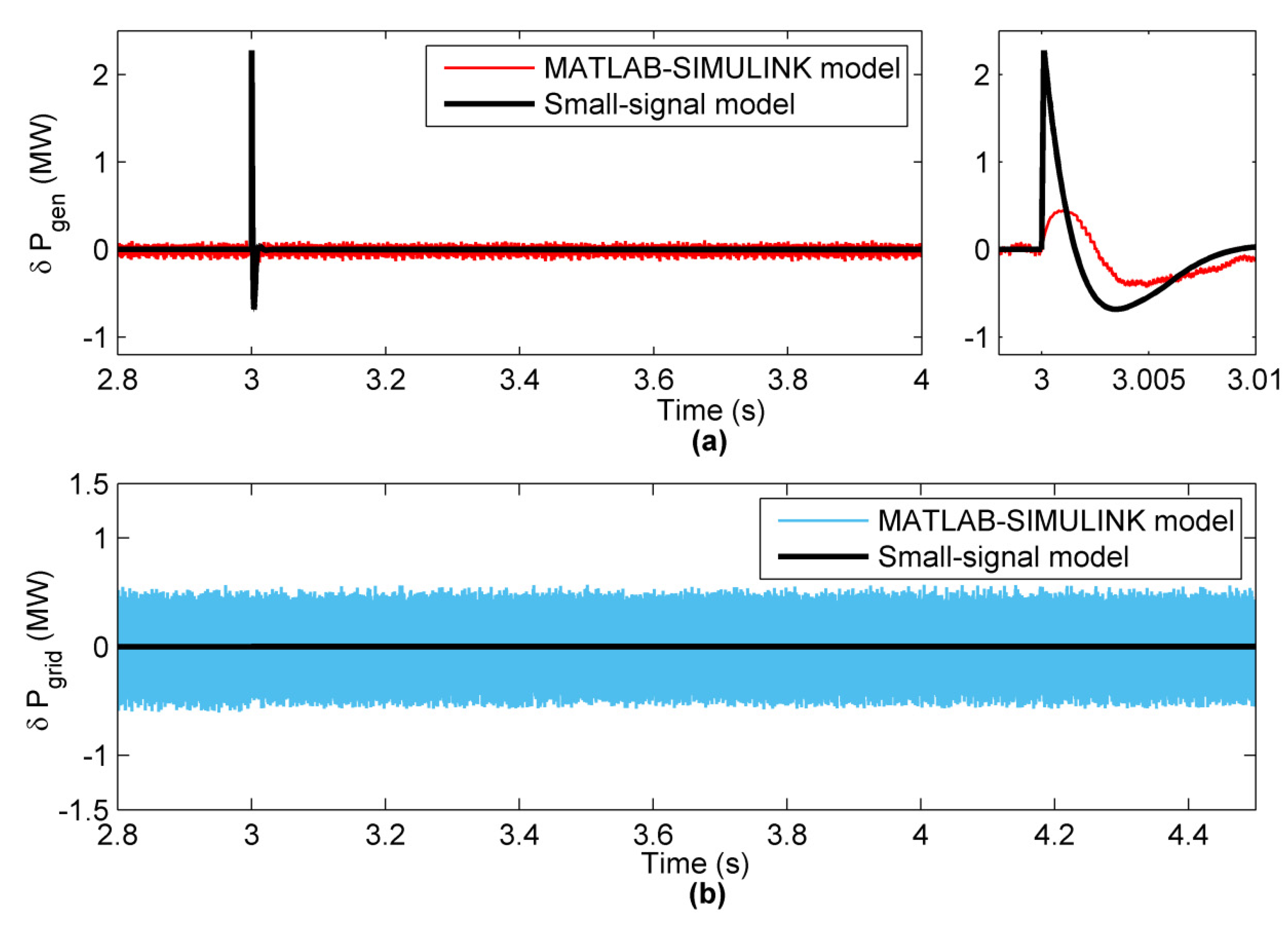
4.3. Case (c) Step Response Simulation and Comparison of the
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Vectors and Symbols | Subscripts | ||
| Air density | Wind | ||
| Blade swept area | Turbine | ||
| Tip speed ratio | Direct and quadrature components of stator | ||
| Pitch angle | Direct and quadrature components of grid side | ||
| Speed | Generator | ||
| Power | dc-link | ||
| Torque | Reference | ||
| Inertia of turbine and generator | Maximum power point tracking | ||
| Damping coefficient | Mechanical, Electrical | ||
| Angular speed | Optimal | ||
| Voltage, Current | Maximum | ||
| Resistance, Inductance | Operating value | ||
| Magnetic Flux | Superscripts | ||
| Output voltage of GSC | Control input | ||
Appendix A
References
- Takahashi, K.; Jargalsaikhan, N.; Rangarajan, S.; Hemeida, A.M.; Takahashi, H.; Senjyu, T. Output Control of Three-Axis PMSG Wind Turbine Considering Torsional Vibration Using H Infinity Control. Energies 2020, 13, 3474. [Google Scholar] [CrossRef]
- Deng, J.; Wang, J.; Li, S.; Zhang, H.; Peng, S.; Wang, T. Adaptive Damping Design of PMSG Integrated Power System with Virtual Synchronous Generator Control. Energies 2020, 13, 2037. [Google Scholar] [CrossRef] [Green Version]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. Efficient Low-Voltage Ride-Through Nonlinear Backstepping Control Strategy for PMSG-Based Wind Turbine During the Grid Faults. J. Oper. Autom. Power Eng. 2018, 6, 218–228. [Google Scholar] [CrossRef]
- Zhong, C.; Wei, L.; Yan, G. Low Voltage Ride-through Scheme of the PMSG Wind Power System Based on Coordinated Instantaneous Active Power Control. Energies 2017, 10, 995. [Google Scholar] [CrossRef] [Green Version]
- Gencer, A. Analysis and Control of Fault Ride-Through Capability Improvement for Wind Turbine Based on a Permanent Magnet Synchronous Generator Using an Interval Type-2 Fuzzy Logic System. Energies 2019, 12, 2289. [Google Scholar] [CrossRef] [Green Version]
- El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies 2020, 13, 2972. [Google Scholar] [CrossRef]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. A review of low-voltage ride-through enhancement methods for permanent magnet synchronous generator based wind turbines. Renew. Sustain. Energy Rev. 2015, 47, 399–415. [Google Scholar] [CrossRef]
- Geng, H.; Liu, L.; Li, R. Synchronization and Reactive Current Support of PMSG-Based Wind Farm During Severe Grid Fault. IEEE Trans. Sustain. Energy 2018, 9, 1596–1604. [Google Scholar] [CrossRef]
- Nasiri, M.; Faridpak, B.; Farrokhifar, M. Low Voltage Ride Through Enhancement in PMSG-based Wind Turbines using De-loading Droop. In Proceedings of the 2020 11th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Piscataway, NJ, USA, 4–6 Febuary 2020; IEEE: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Mendes, V.; Matos, F.; Liu, S.; Cupertino, A.; Pereira, H.; De Sousa, C. Low Voltage Ride-Through Capability Solutions for Permanent Magnet Synchronous Wind Generators. Energies 2016, 9, 59. [Google Scholar] [CrossRef] [Green Version]
- Firouzi, M.; Nasiri, M.; Benbouzid, M.; Gharehpetian, G.B. Application of multi-step bridge-type fault current limiter for fault ride-through capability enhancement of permanent magnet synchronous generator-based wind turbines. Int. Trans. Electr. Energy Syst. 2020, e12611. [Google Scholar] [CrossRef]
- Firouzi, M.; Nasiri, M.; Mobayen, S.; Gharehpetian, G.B. Sliding Mode Controller-Based BFCL for Fault Ride-Through Performance Enhancement of DFIG-Based Wind Turbines. Complexity 2020, 2020, 1259539. [Google Scholar] [CrossRef]
- Kim, C.; Kim, W. Coordinated Fuzzy-Based Low-Voltage Ride-Through Control for PMSG Wind Turbines and Energy Storage Systems. IEEE Access 2020, 8, 105874–105885. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Kennel, R. Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines. Energies 2016, 9, 1066. [Google Scholar] [CrossRef]
- Kim, K.; Jeung, Y.; Lee, D.; Kim, H. LVRT Scheme of PMSG Wind Power Systems Based on Feedback Linearization. IEEE Trans. Power Electron. 2012, 27, 2376–2384. [Google Scholar] [CrossRef]
- Nasiri, M.; Mobayen, S.; Zhu, Q.M. Super-Twisting Sliding Mode Control for Gearless PMSG-Based Wind Turbine. Complexity 2019, 2019, 6141607. [Google Scholar] [CrossRef]
- Pradhan, S.; Singh, B.; Panigrahi, B.K.; Murshid, S. A Composite Sliding Mode Controller for Wind Power Extraction in Remotely Located Solar PV–Wind Hybrid System. IEEE Trans. Ind. Electron. 2019, 66, 5321–5331. [Google Scholar] [CrossRef]
- Lee, S.-W.; Chun, K.-H. Adaptive Sliding Mode Control for PMSG Wind Turbine Systems. Energies 2019, 12, 595. [Google Scholar] [CrossRef] [Green Version]
- Chavira, F.; Ortega-Cisneros, S.; Rivera, J. A Novel Sliding Mode Control Scheme for a PMSG-Based Variable Speed Wind Energy Conversion System. Energies 2017, 10, 1476. [Google Scholar] [CrossRef] [Green Version]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. Modeling, analysis and comparison of TSR and OTC methods for MPPT and power smoothing in permanent magnet synchronous generator-based wind turbines. Energy Convers. Manag. 2014, 86, 892–900. [Google Scholar] [CrossRef]
- Rahimi, M. Mathematical modeling, dynamic response analysis, and control of PMSG-based wind turbines operating with an alternative control structure in power control mode. Int. Trans. Electr. Energy Syst. 2017, 27, e2423. [Google Scholar] [CrossRef]
- Hosseinipour, A.; Hojabri, H. Small-Signal Stability Analysis and Active Damping Control of DC Microgrids Integrated With Distributed Electric Springs. IEEE Trans. Smart Grid 2020, 11, 3737–3747. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Chung, I.-Y.; Moon, S.-I. Tuning of the PI Controller Parameters of a PMSG Wind Turbine to Improve Control Performance under Various Wind Speeds. Energies 2015, 8, 1406–1425. [Google Scholar] [CrossRef] [Green Version]
- Nasiri, M.; Mohammadi, R. Peak Current Limitation for Grid Side Inverter by Limited Active Power in PMSG-Based Wind Turbines During Different Grid Faults. IEEE Trans. Sustain. Energy 2017, 8, 3–12. [Google Scholar] [CrossRef]
- Nasiri, M.; Milimonfared, J.; Fathi, S.H. Robust Control of PMSG-based Wind Turbine under Grid Fault Conditions. Indian J. Sci. Technol. 2015, 8. [Google Scholar] [CrossRef]
- Cortes-Vega, D.; Ornelas-Tellez, F.; Anzurez-Marin, J. Comparative analysis of MPPT techniques and Optimal Control for a PMSG-based WECS. In Proceedings of the 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellin, Colombia, 15–18 October 2019; pp. 1–6. [Google Scholar]


















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasiri, M.; Mobayen, S.; Faridpak, B.; Fekih, A.; Chang, A. Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies. Energies 2020, 13, 6685. https://doi.org/10.3390/en13246685
Nasiri M, Mobayen S, Faridpak B, Fekih A, Chang A. Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies. Energies. 2020; 13(24):6685. https://doi.org/10.3390/en13246685
Chicago/Turabian StyleNasiri, Mojtaba, Saleh Mobayen, Behdad Faridpak, Afef Fekih, and Arthur Chang. 2020. "Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies" Energies 13, no. 24: 6685. https://doi.org/10.3390/en13246685
APA StyleNasiri, M., Mobayen, S., Faridpak, B., Fekih, A., & Chang, A. (2020). Small-Signal Modeling of PMSG-Based Wind Turbine for Low Voltage Ride-Through and Artificial Intelligent Studies. Energies, 13(24), 6685. https://doi.org/10.3390/en13246685