The Communication System and its Impacts on Line Current Differential Protection in Distributed Feeder Automation


Abstract
:1. Introduction
- The communication system for LCDP in distribution networks has its special requirements: multi device participation and adequate performance with low cost. So the existing design of the communication system, including transmission network and distribution network, cannot be used directly. Based on a real project, the design method considering the characteristics of LCDP is discussed in detail.
- As a protection, LCDP needs to be fast enough to isolate faults, but as a distributed system, it must wait for data from other PDs. Therefore, the analysis of the impact of the communication system on LCDP is of great significance to speed up the protection and improve the protection performance. Impact factors, including time delay, data loss, and jitter, are studied.
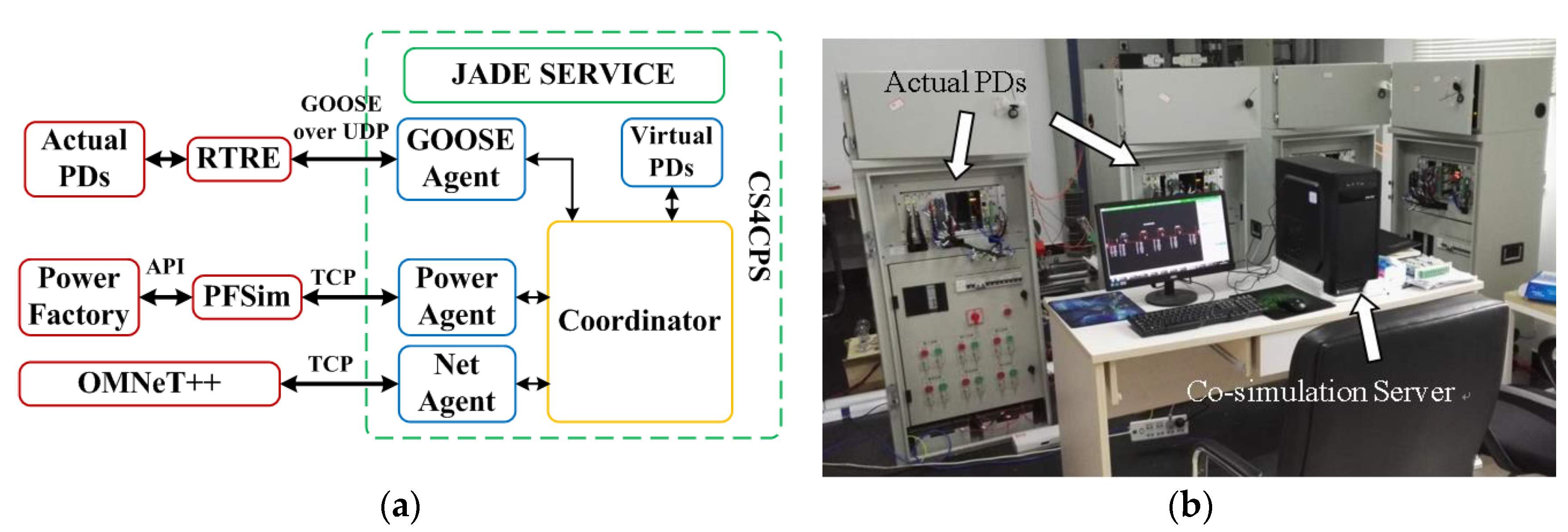
- The performance of LCDP is affected by both the power system and communication system, but it is difficult to build a unified model for analysis. In contrast, the co-simulation environment for a cyber-physical system is an effective tool to study it. In this paper, the cyber-physical model based on the real project is established, and the design and analysis in the paper are validated.
2. Communication System Design for LCDP
2.1. Communication Mode
- Integration with Ethernet passive optical network (EPON) communication system. EPON is a point to multi-point communication system. Under this structure, devices cannot communicate with each other directly, and all data must be exchanged on the server. The optical line terminal (OLT), which connects to substation communications networks (SCN), is placed in a substation for data processing and timing management. The optical network unit (ONU) is connected with ring main units (RMU) for conversion of optical signal and electrical signal. A splitter is used to realize the distribution and coupling of optical fiber channels. To integrate EPON and RTRE, multi-core optical cable (48 cores in Xiangtan pilot project) can be used for networking. LCDP occupies some channels according to the communication and backup requirements, and EPON occupies the rest, as shown in Figure 1a. Although the optical fiber cable can be shared in this method, the devices for both EPON and RTRE need to be installed and maintained, resulting in the increase of cost.
- Integration with the industrial Ethernet system (IES). Although the original communication network and the LCDP communication network can be configured as two independent networks according to the EPON integration method, the required devices and maintenance costs also need to be doubled. The solution to reduce the cost is to combine the original communication network and LCDP communication network into a single one, as shown in Figure 1b. Such a design will not increase any construction cost and maintenance cost, and is the most economical method.
2.2. Topology
- Open loop connection from same substation. Two feeders are led out from the same substation and connected at the end through the tie switch. The electrical topology is a ring, so the RTRE can be deployed easily, as shown in Figure 2a.
- Open loop connection from different substations. Two feeders are respectively led out from two substations, and connected at the end through the tie switch. Because the electrical topology is a line, it is unaffordable to lay two optical fiber cables between two substations. The solution is to put two optical channels into the same multi-core optical cable to form a circular communication channel, as shown in Figure 2b. When the optical fiber fails, the connection can ensure the rapid recovery of communication. However, if the optical fiber cable is damaged by an external force (such as cut by excavator), the communication cannot be restored. Although LCDP can still quickly isolate faults, the deviation of fault location will increase, resulting in expansion of power loss area.
- Double shunt connection. Adding a cable to the open loop network connecting two substations forms a double-loop network. Along with the new cable, breakers and optical fiber cables will be also installed. Two communication cables can form a communication ring network, and LCDP based on this topology can realize all functions, as shown in Figure 2c. This topology is composed of four feeders, so the number of PDs is more than other topologies, which will affect communication delay, jitter, etc. If communication requirements are not met, a communication link in the middle of the ring network can be added. The new link can divide the large ring into two small rings to improve the performance of the communication system.
- Overhead line with multiple sources. The communication channels are difficult to form the real ring network. For them, to realize a dual fiber channel-based ring communication network by a multi-core optical cable is an effective solution. In particular, boundary PDs need to be interconnected with optical fiber, as shown in Figure 2d. Such connections can ensure that the optical fiber at the multi-connection point has enough backup channels.
- Lattice type loop connection. The lattice type distribution network is actually two interconnected ring networks, so it can be easily connected into two RTREs, as shown in Figure 2e.
2.3. Communication Protocol
2.4. Synchronization
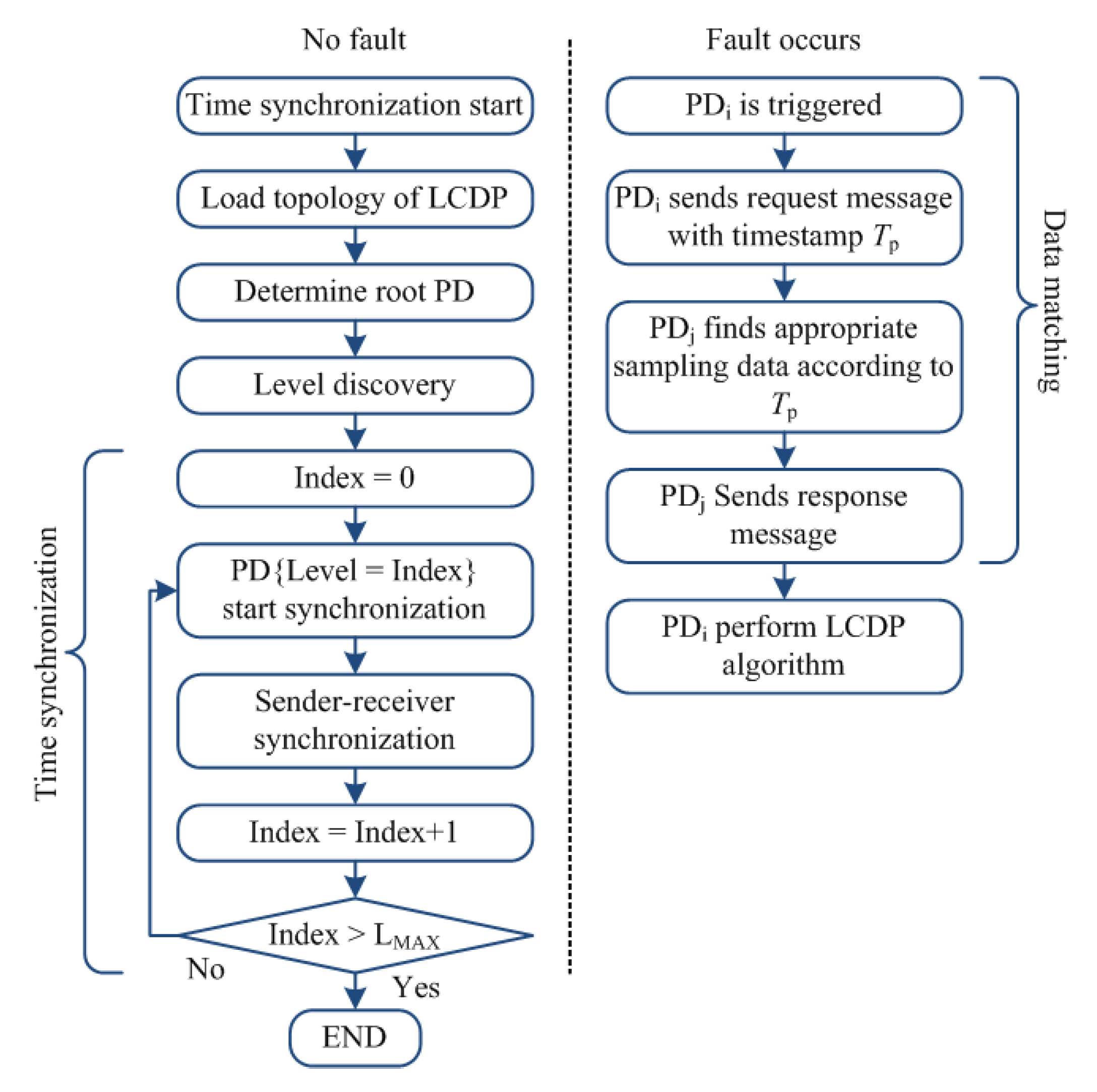
- Time synchronization start. The start of this task is cyclical, and because most PDs have high precision internal clocks, which can get high accuracy in a short period, synchronization does not need to be too frequent. Similar to GPS second pulse signal, it is appropriate to use 1 second as synchronization time interval.
- Load topology of LCDP. Topology identification is an important part of the LCDP algorithm [20], so the synchronization algorithm can use the result directly.
- Determine root PD. The time synchronization of TPSN is progressive according to the topology. Each synchronization will produce a time error, and the cumulative error will increase if the depth of topology is greater. The best way to solve this problem is to set the root node to the central node of the chain network, which can minimize the depth of the topology and the cumulative error.
- Level discovery and time synchronization. TPSN is used in this part. Refer to [27] for specific operation.
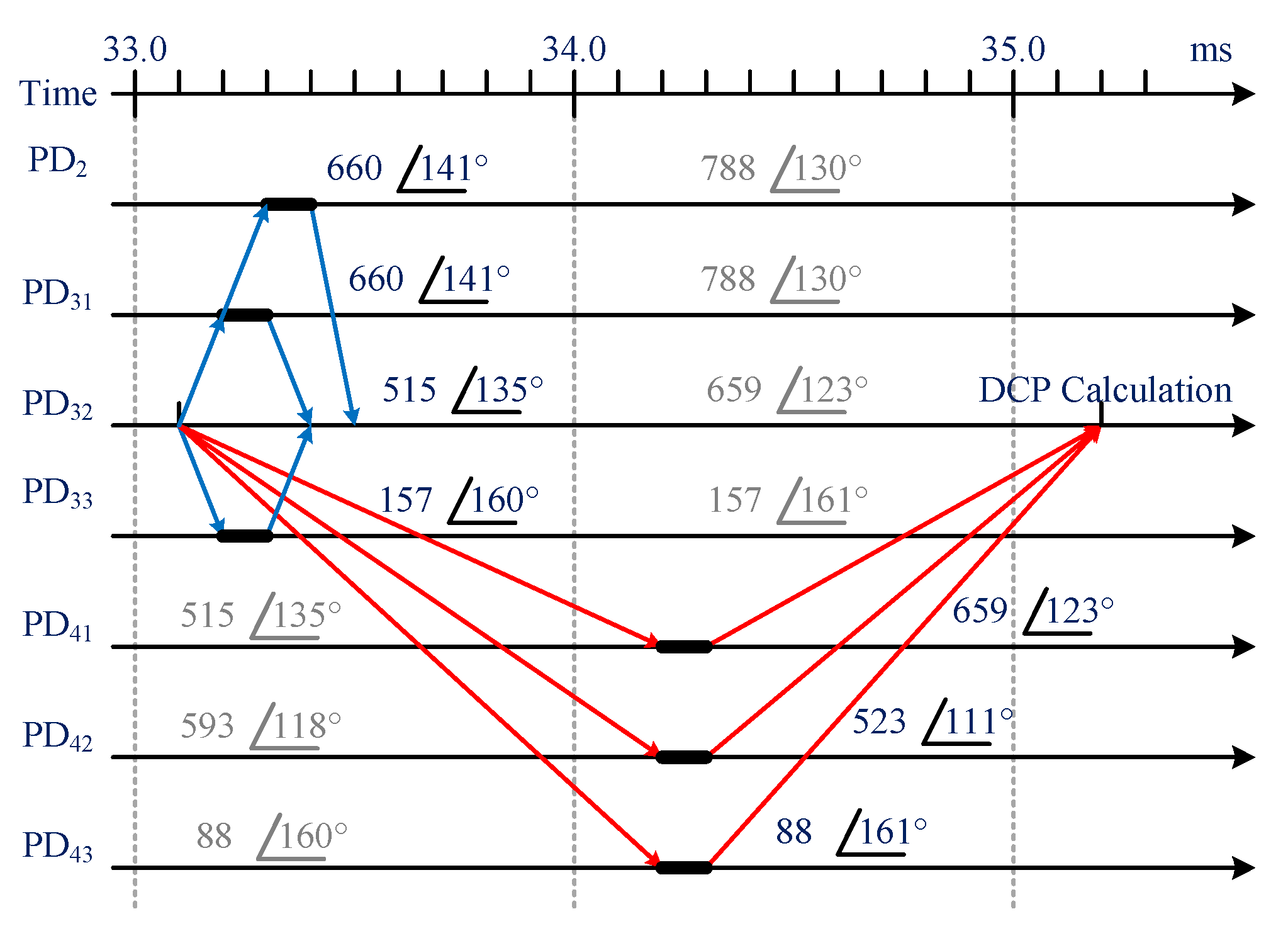
- Data matching. Define PDi is a triggered PD when the fault occurs, and PDj is the PD that needs to return sampling data to PDi. After being triggered, PDi needs to get data from PDj for LCDP calculation. PDi adds the timestamp of sampling data (TP) into the GOOSE frame and sends it to PDj. Each PDj receives the frame, does not return the latest sampling data, but returns the sampling data closest to TP. After data matching, the data consistency on time can be guaranteed.
3. Impacts of Communication System on LCDP
3.1. Impact of Time Delay
3.2. Impact of Data Loss
3.3. Impact of Delay Jitter
- Some types of frame also require strict timing, such as control data frame and synchronous data frame. These frames must be set to the high priority, so they will inevitably have impacts on the data delay of LCDP.
- The short-term congestion caused by the distributed processing mechanism of PDs cannot be avoided, especially when the communication network is abnormal.
4. Impact Analysis by Co-Simulation
4.1. Modeling
4.2. Measurement of Communication Parameters
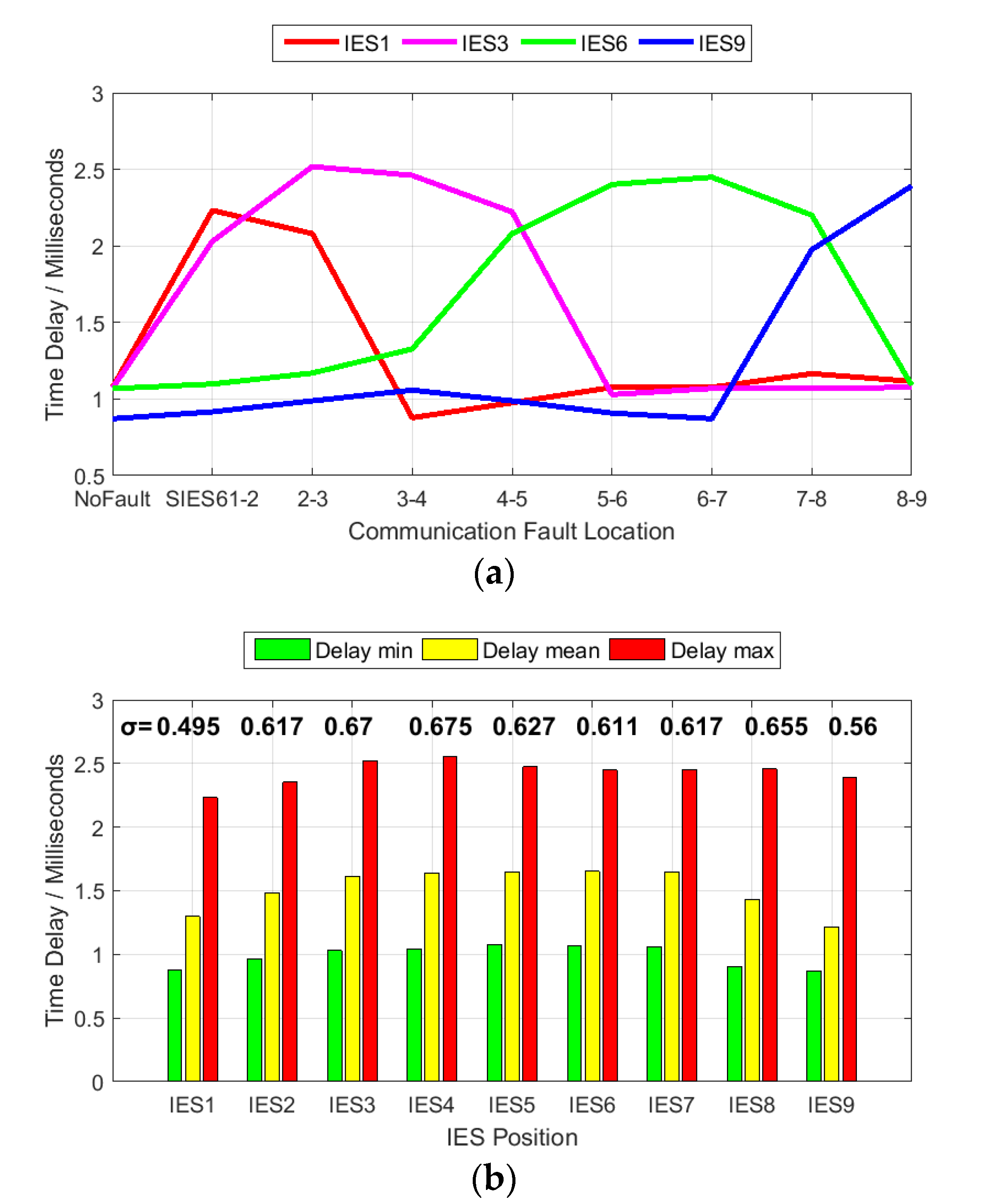
4.3. N-1 Test and Delay Analysis
4.4. Fault Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, F.; Mu, L. New protection scheme for internal fault of multi-microgrid. Prot. Control Mod. Power Syst. 2019, 4, 159–170. [Google Scholar] [CrossRef]
- Khond, S.V.; Dhomane, G.A. Optimum coordination of directional overcurrent relays for combined overhead/cable distribution system with linear programming technique. Prot. Control Mod. Power Syst. 2019, 4, 114–120. [Google Scholar] [CrossRef] [Green Version]
- Thirumalai, A.; Liu, X.; Karady, G.G. Ultra fast pilot protection of a looped distribution system. In Proceedings of the PIEEE Trondheim PowerTech, Trondheim, Norway, 19–23 June 2011; pp. 1–8. [Google Scholar]
- Tang, J.; Gong, Y.; Schulz, N.; Steurer, M.; McLaren, P.G. Implementation of a ship-wide area differential protection scheme. IEEE Trans. Ind. Appl. 2008, 4, 1864–1871. [Google Scholar] [CrossRef]
- Tatcho, P.; Li, H.; Jiang, Y.; Qi, L. A novel hierarchical section protection based on the solid state transformer for the future renewable electric energy delivery and management. IEEE Trans. Smart Grid 2013, 4, 1096–1104. [Google Scholar] [CrossRef]
- Gao, H.; Li, J.; Xu, B. Principle and implementation of current differential protection in distribution networks with high penetration of DGs. IEEE Trans. Power Deliv. 2017, 32, 565–574. [Google Scholar] [CrossRef]
- Han, B.; Wang, G. An improved pilot protection for distribution network with inverter-interfaced distributed generations. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Conference, Xi’an, China, 25–28 October 2016; pp. 2555–2559. [Google Scholar]
- Weng, J.D.; Liu, D.; Zhao, Q. Current mutation and phase differential fault identification algorithm based on supply area sampling calibration method for active distribution network. In Proceedings of the CIRED, Helsinki, Finland, 14–15 June 2016; pp. 1–4. [Google Scholar]
- Abdulwahid, A.H.; Wang, S. A new differential protection scheme for microgrid using Hilbertspace based power setting and fuzzy decision processes. In Proceedings of the IEEE 11th Conference on Industrial Electronics and Applications, Hefei, China, 5–7 June 2016; pp. 6–11. [Google Scholar]
- Csagrande, E.; Woon, W.L.; Zeineldin, H.H.; Svetinovic, D. A differential sequence component protection scheme for microgrids with inverter-based distributed generators. IEEE Trans. Smart Grid 2014, 5, 29–37. [Google Scholar] [CrossRef]
- Yip, T.; Wang, J.; Xu, B.; Fan, K.; Li, T. Fast self-healing control of faults in MV networks using distributed intelligence. CIRED 2017, 2017, 1131–1133. [Google Scholar] [CrossRef] [Green Version]
- Nafi, N.S.; Ahmed, K.; Datta, M.; Gregory, M.A. A novel Zigbee based pilot protection scheme for smart distribution grid. In Proceedings of the Australasian Telecommunication Networks and Applications Conference, Southbank, VIC, Australia, 26–28 November 2014; pp. 146–151. [Google Scholar]
- Eissa, M.M. Protection technique for complex distribution smart grid using wireless token ring protocol. IEEE Trans. Smart Grid 2012, 3, 1106–1117. [Google Scholar] [CrossRef]
- Geiger, S.; Smit, A.; Bowman, D. Distributed synchronous coordination field testing of an actual automated distribution feeder system. In Proceedings of the CIRED, Helsinki, Finland, 14–15 June 2016; pp. 1–4. [Google Scholar]
- Guo, R.; Vankayala, V.; Qu, C.; Crozier, E.; Allen, S.; Adeleye, K.; Dabic, V.; Found, P.; Shah, N. Fault Location, Isolation and Service Restoration—Optimizing Field Operations for Utilities. In Proceedings of the IEEE Rural Electric Power Conference, Westminster, CO, USA, 15–18 May 2016; pp. 1–9. [Google Scholar]
- Che, L.; Khodayar, M.E.; Shahidehpour, M. Adaptive protection system for microgrids. IEEE Electrif. Mag. 2014, 2, 66–80. [Google Scholar] [CrossRef]
- MV Public Distribution Networks throughout the World. Available online: http://studiecd.dk/cahiers_techniques/MV_public_distribution_networks.pdf (accessed on 29 February 2020).
- Apostolov, A. To GOOSE or not to GOOSE?—That is the question. In Proceedings of the Annual Conference for Protective Relay Engineers, College Station, TX, USA, 30 March–2 April 2015; pp. 583–596. [Google Scholar]
- Wang, J.; Costa, L.M.; Cisse, B.M. From Distribution Feeder to MicroGrid: An Insight on Opportunities and Challenges. In Proceedings of the IEEE International Conference on Power System Technology, Wollongong, NSW, Australia, 28 September–1 October 2016; pp. 1–6. [Google Scholar]
- Li, W.; Li, Y.; Chen, C.; Tan, Y.; Cao, Y.; Zhang, M.; Peng, Y.; Chen, S. A full decentralized multi-agent service restoration for distribution network with DGs. IEEE Trans. Smart Grid 2019. [Google Scholar] [CrossRef]
- Hunt, R.; Flynn, B.; Smith, T. The Substation of the Future-Moving toward a Digital Solution. IEEE Power Energy Mag. 2019, 17, 47–55. [Google Scholar] [CrossRef]
- Seewald, M.G. Scalable network architecture based on IP-Multicast for power system networks. In Proceedings of the Innovative Smart Grid Technologies Conference, Washington, DC, USA, 19 May 2014; pp. 1–5. [Google Scholar]
- Fan, Y.; Wang, Q.; Peng, H.; Lin, S.; Fan, K.; Chen, Y. GOOSE over UDP transmission mechanism for real-time data fast transmission in distribution network. In Proceedings of the International Green and Sustainable Computing Conference, Hangzhou, China, 7–9 November 2016; pp. 1–5. [Google Scholar]
- Rinaldi, S.; Bonafini, F.; Ferrari, P.; Flammini, A.; Sisinni, E.; Cara, D.D.; Panzavecchia, N.; Tinè, G.; Cataliotti, A.; Cosentino, V.; et al. Characterization of IP-Based Communication for Smart Grid Using Software-Defined Networking. IEEE Trans. Instrum. Meas. 2018, 67, 2410–2419. [Google Scholar] [CrossRef]
- Rinaldi, S.; Giustina, D.D.; Ferrari, P.; Flammini, A. Time synchronization over heterogeneous network for smart grid application: Design and characterization of a real case. Ad Hoc Netw. 2016, 50, 47–57. [Google Scholar] [CrossRef]
- Rinaldi, S.; Ferrari, P.; Flammini, A. Analysis of IEEE 1588-based Cyber Physical System for micro grid automation. In Proceedings of the IEEE International Symposium on Precision Clock Synchronization for Measurement, Control, and Communication, Beijing, China, 11–16 October 2015; pp. 31–36. [Google Scholar]
- Ganeriwal, S.; Kumar, R.; Srivastava, M. Timing-sync Protocol for Sensor Networks. In Proceedings of the First ACM Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 1–12. [Google Scholar]
- Szigeti, T.; Hattingh, C. End-To-End QoS Network Design: Quality of Design in LANs WANs, and VPNs; Cisco Press: San Jose, CA, USA, 2004; pp. 7–10. [Google Scholar]
- Xu, X.; Ni, Y. Analysis of networking mode caused by GOOSE delay of smart substation. In Proceedings of the International Conference on Software Engineering and Service Science, Beijing, China, 23–25 May 2013; pp. 503–506. [Google Scholar]
- Li, W.; Tan, Y.; Li, Y.; Cao, Y.; Chen, C.; Zhang, M. A new differential backup protection strategy for smart distribution networks: A fast and reliable approach. IEEE Access 2019, 7, 38135–38145. [Google Scholar] [CrossRef]
- Duan, Y.; Luo, L.; Li, Y.; Cao, Y.; Rehtanz, C.; Kuech, M. Co-simulation of distributed control system based on JADE for smart distribution networks with distributed generations. IET Gener. Transm. Distrib. 2017, 11, 3097–3105. [Google Scholar] [CrossRef]
- Homepage of the Co-Simulation Environment for Cyber-Physical Smart Energy Systems. Available online: https://github.com/CS4CPS/ (accessed on 7 February 2020).
| 1 | BB1-RMU1 |












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Sending–Receiving Bus | Distance (km) | Line Impedance (ohm) | Load at Receiving Bus (MVA) |
|---|---|---|---|---|
| 1 | BB1-RMU1 | 0.300 | 0.019 + j0.023 | 0 |
| 2 | RMU1-S2 | 1.081 | 0.141 + j0.497 | 0 |
| 3 | S2-RMU3 | 0.763 | 0.065 + j0.149 | 2.59 |
| 4 | RMU3-RMU4 | 0.340 | 0.022 + j0.026 | 1.45 |
| 5 | RMU4-RMU5 | 0.195 | 0.012 + j0.015 | 1.52 |
| 6 | RMU5-RMU6 | 0.717 | 0.046 + j0.054 | 2.87 |
| 7 | RMU6-RMU7 | 0.955 | 0.061 + j0.072 | 0.50 |
| 8 | RMU7-RMU8 | 0.645 | 0.041 + j0.049 | 3.83 |
| 9 | RMU8-RMU9 | 0.215 | 0.014 + j0.016 | 0.74 |
| 10 | RMU9-BB2 | 0.935 | 0.060 + j0.070 | 0 |
| d (bytes) | d/R (us) | TRT (us, N = 2) | TRT (us, N = 6) | TC (us) | tr (us) |
|---|---|---|---|---|---|
| 64 | 5.12 | 145 | 215 | 27.5 | 3.63 |
| 128 | 10.24 | 185 | 285 | 33.75 | 2.26 |
| 192 | 15.35 | 225 | 375 | 36.25 | 3.39 |
| 256 | 20.48 | 275 | 465 | 45 | 3.27 |
| 320 | 25.6 | 305 | 535 | 47.5 | 3.15 |
| 384 | 30.72 | 355 | 635 | 53.75 | 4.28 |
| 448 | 35.84 | 395 | 705 | 60 | 2.91 |
| 512 | 49.96 | 435 | 785 | 65 | 2.79 |
| Fault Line | Action Switch (Trigger Time/ms) |
|---|---|
| No Fault | S52 (32.8 ms), S61 (34.1 ms) |
| RMU1-S2 | S52 (32.8 ms), S61 (34.1 ms), S2 (36.1 ms) |
| S2-RMU3 | S52 (32.8 ms), S61 (34.1 ms), S31 (35.8 ms) |
| RMU3-RMU4 | S52 (32.8 ms), S61 (34.0 ms), S32 (35.2 ms), S41 (35.5 ms) |
| RMU4-RMU5 | S52 (33.1 ms), S61 (34.0 ms), S42 (35.1 ms), S51 (35.1 ms) |
| RMU5-RMU6 | S52 (33.5 ms), S61 (35.1 ms) |
| RMU6-RMU7 | S52 (32.8 ms), S61 (35.8 ms) |
| RMU7-RMU8 | S52 (32.8 ms), S61 (33.9 ms) |
| RMU8-RMU9 | S52 (32.8 ms), S61 (33.9 ms) |
| Fault Line Location | Upstream | Downstream |
|---|---|---|
| Protection Zone | <PD31, PD32, PD33> | <PD32, PD41> |
| Proportion of Fault Current (PCF) | 1.82 × 10−6 | 23.3 |
| Verification Zone | <PD2, PD32, PD33> | <PD32, PD42, PD43> |
| PCF | 1.18 × 10−2 | 22.9 |
| S0 | 10 | 10 |
| Conclusion | No fault | Short-circuit fault occurs |
| Fault Line | Action Switch (Trigger Time/ms) |
|---|---|
| No Fault | S52 (32.8 ms), S61 (33.8 ms) |
| RMU1-S2 | S52 (32.8 ms), S61 (33.8 ms) |
| S2-RMU3 | S52 (32.8 ms), S61 (33.8 ms) |
| RMU3-RMU4 | S52 (32.8 ms), S61 (33.8 ms) |
| RMU4-RMU5 | S52 (33.1 ms), S61 (33.8 ms) |
| RMU5-RMU6 | S52 (33.3 ms), S61 (34.4 ms) |
| RMU6-RMU7 | S52 (32.8 ms), S61 (34.5 ms) |
| RMU7-RMU8 | S52 (32.8 ms), S61 (33.8 ms) |
| RMU8-RMU9 | S52 (32.8 ms), S61 (33.8 ms) |
| Background Traffic Type | Priority | Packet Size (bytes) | Generation Period (s) |
|---|---|---|---|
| Phasor Measurement | 1 | 120 | 0.02 |
| Time Synchronization | 1 | 88 | 1 |
| Electric Information Acquisition | 2 | 100 | 15 |
| Distributed Generation Management | 2 | 111 | 0.02 |
| Electric Vehicle Management | 2 | 100 | 0.02 |
| DSCADA | 3 | 152 | 300 |
| Video Monitoring | 3 | 437 | 0.0001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Y.; Luo, L.; Li, Y.; Cao, Y. The Communication System and its Impacts on Line Current Differential Protection in Distributed Feeder Automation. Energies 2020, 13, 1298. https://doi.org/10.3390/en13061298
Duan Y, Luo L, Li Y, Cao Y. The Communication System and its Impacts on Line Current Differential Protection in Distributed Feeder Automation. Energies. 2020; 13(6):1298. https://doi.org/10.3390/en13061298
Chicago/Turabian StyleDuan, Yilong, Longfu Luo, Yong Li, and Yijia Cao. 2020. "The Communication System and its Impacts on Line Current Differential Protection in Distributed Feeder Automation" Energies 13, no. 6: 1298. https://doi.org/10.3390/en13061298
APA StyleDuan, Y., Luo, L., Li, Y., & Cao, Y. (2020). The Communication System and its Impacts on Line Current Differential Protection in Distributed Feeder Automation. Energies, 13(6), 1298. https://doi.org/10.3390/en13061298